Изобретение относится к способам осуществления комплексного контроля состояния многопараметрических объектов (динамических систем, процессов) (МПО) по разнородной измерительной информации и может быть использовано в системах распознавания образов, диагностики, а также в системах управления объектами (динамическими системами, процессами) в технической и социальной сферах деятельности.
В последнее время возрастает актуальность оперативного получения достоверной комплексной оценки состояния пространственно распределенных или сосредоточенных МПО по данным разнородной измерительной информации, поступающей от средств контроля различных видов (инфракрасного, радиоволнового, оптического, магнитного и т.п.).
К настоящему моменту времени предложен ряд технических решений, обеспечивающих получение комплексных (интегральных) оценок состояния МПО.
Известен способ контроля и оценки технического состояния многопараметрического объекта по данным телеметрической информации [Россия, патент №2099792, МПК G08C 15/06, 1997], предлагающий преобразование однородных параметров датчиков путем формирования соответствующего цветового сигнала видимого спектра в зависимости от величины однородного сигнала каждого датчика на заданном временном интервале, отображение сигналов в виде матрицы, столбцы которой соответствуют номерам датчиков, строки - заданным временным интервалам их регистрации, определении эпицентра локального возмущения по цветовому сигналу наибольшей величины на заданном временном интервале.
Недостатком указанного способа являются значительные затраты времени на фиксацию фактов изменения состояния МПО по отклонениям его параметров от допусков.
Также известен способ контроля и оценки технического состояния многопараметрического объекта диагностики по данным измерительной информации [Россия, патент №2145735, МПК G08C 15/06, 2000], заключающийся в априорном представлении совместного функционирования структурных элементов многопараметрического объекта в виде структурно-функциональной схемы состояний, кодировании одним цветом схемы при нормальном функционировании объекта диагностики, кодировании другим цветом выделенной аномальной области состояния структурных элементов при возникновении аномальной ситуации, составлении цветокодовой матрицы размером «n*t», где n - номера параметров (датчиков), вышедших за допуск (начиная с первого), a t - время наблюдения (регистрации) аномалии, по которой определяют параметры (датчики), фиксирующие аномалию и местонахождение (топологию) неисправного структурного элемента или множества структурных элементов, охваченных причинно-следственными связями с неисправным структурным элементом.
Недостатком данного аналога является невозможность его использования при одновременном возникновении аномальных ситуаций более чем на одном структурном элементе.
Наиболее близким аналогом (прототипом) заявленного способа является способ динамического анализа состояний многопараметрического объекта или процесса [Россия, патент №2138849, МПК G06F 19/00,1999], заключающийся в оперативном преобразовании результатов допусковой оценки параметров в соответствующие информационные сигналы в заданном временном интервале, причем в качестве оцениваемой характеристики процесса могут быть амплитуда, частота и т.п., в качестве параметров оцениваемой характеристики используют динамические параметры, операцию преобразования осуществляют путем формирования соответствующего цветового сигнала видимого спектра в зависимости от результатов допусковой оценки факта и направления изменения динамического параметра (падает, повышается, не изменяется) с обобщением по всему множеству параметров на заданном временном интервале, отображают информационные сигналы посредством цветокодовой матрицы-диаграммы, столбцы которой соответствуют относительной величине оцененного класса состояния параметров объекта, а строки - заданным временным интервалам, и определяют относительную величину и характер изменения интегрального состояния объекта по направлениям изменения и относительным величинам этого изменения во времени цветовых сигналов.
Недостатками прототипа являются: ограниченность функциональных возможностей способа, так как в нем не обеспечивается одновременное отображение результатов допусковой оценки значений каждого из всей совокупности контролируемых разнородных параметров МПО, что приводит к недостаточной точности оценки состояния МПО, так как прототип на каждом последующем временном интервале относит к классу состояния Кс, объединяющему неизменные параметры объекта, и параметры с аномальными, но не изменившимися по сравнению с предыдущим временным интервалом, значениями. В свою очередь, недостаточная точность оценки состояния МПО приводит к ошибочному выбору управляющих воздействий на параметры объекта.
Задачей настоящего изобретения является повышение точности комплексного контроля состояния многопараметрического объекта по разнородной измерительной информации за счет расширения функциональных возможностей.
Поставленная задача решается за счет того, что в известном способе динамического анализа состояний МПО, заключающемся в оперативном преобразовании результатов допусковой оценки параметров в соответствующие информационные цветовые сигналы видимого спектра в зависимости от результатов допусковой оценки, факта и направления изменения динамического параметра с обобщением по всему множеству контролируемых параметров на заданном временном интервале и их отображении, новым является то, что обеспечивается:
- унифицированное преобразование результатов допусковой оценки значений каждого из контролируемых в заданном временном интервале параметров в значения признаков соответствия и последующее их использование при формировании цветографической формы, которая позволяет оперативно объединить и одновременно компактно представить разнородные данные о состоянии объекта и его изменениях, полученные в результате осуществленных различных видов контроля вне зависимости от количества контролируемых параметров, их физической сущности и единиц измерения; что существенно расширяет функциональные возможности способа, а также повышает точность распознавания вида состояния и определения причин и последствий аномального функционирования объекта контроля;
- совмещение цветографических форм, сформированных в различных временных интервалах, с помощью которых осуществляется представление необходимых данных в виде временных рядов, использование которых позволяет более точно определить форму, числовые характеристики тенденций изменения и корреляционные свойства контролируемых параметров при выявлении причин, а также при определении возможных последствий изменения состояния объекта контроля.
Предложенный способ отличается от известного наличием и последовательностью выполнения новых действий:
- результаты допусковой оценки контролируемой на заданном временном интервале совокупности параметров объекта преобразовывают в цветографическую форму, вне зависимости от количества, физической сущности, единиц измерения параметров и длительности заданных временных интервалов по унифицированным для всех параметров правилам, которые формируют до начала измерений;
- фиксируют оцененные значения контролируемых параметров и моменты времени окончания измерений в заданных временных интервалах;
- вычисляют значения признаков соответствия оцененных и допустимых значений, для чего делят оцененные на максимально допустимые значения контролируемых параметров объекта, если оцененное больше максимально допустимого, или делят оцененное на минимально допустимое значение, если оцененное меньше минимально допустимого. При этом значению признаков соответствия присваивают единицу, если оцененные значения параметров находятся в интервале их допустимых значений;
- формируют матрицу состояния объекта, количество и номера элементов которой соответствуют количеству и номерам контролируемых параметров объекта, при этом элементам матрицы присваивают вычисленные значения признаков соответствия;
- формируют цветографическую форму, представляющую собой сформированную в полярной системе координат фигуру, которую интерпретируют как образ состояния объекта контроля в момент окончания измерений в заданном временном интервале, при этом для образования границ фигуры линией соединяют метки, координаты расположения которых определяют по значениям полярных радиусов, соединяющих полюс полярной системы координат с метками и полярных углов между радиусами и полярной осью, причем значениям радиусов присваивают значения признаков соответствия, а значения углов находят умножением величины отношения градусной меры полного круга, разделенной на количество параметров к градусной мере радиана на номер параметра;
- совмещают полученные в предыдущих и в последнем (текущем) заданных временных интервалах образы состояния объекта;
- определяют по изменениям координат расположения меток с одинаковыми номерами в совмещаемых образах факты наличия изменений значений признаков соответствия, относительные величины, тенденции изменений параметров объекта;
- формируют из зафиксированных значений моментов времени окончания измерений в предшествующих совмещению образов временных интервалах и признаков соответствия временные ряды и используют их как исходные данные для определения числовых характеристик тенденций изменения, корреляционных свойств контролируемых параметров при выявления причин, а также при определении возможных последствий изменения состояния объекта контроля.
Пусть состояние i-того многопараметрического объекта контроля в момент tк окончания заданного временного интервала Δtк=[t0,tк]∈t, к=1,…,к* характеризуется совокупностью Yi={yij} разнородных параметров, которым присвоены номера j=1,…, j*. Известны значения  нижней и
нижней и  верхней границ интервалов допустимых значений для каждого контролируемого параметра. При этом структура, состав элементов объекта, а следовательно, и количество контролируемых параметров, имеющих различную физическую сущность, могут изменяться в различных интервалах времени функционирования или контроля.
верхней границ интервалов допустимых значений для каждого контролируемого параметра. При этом структура, состав элементов объекта, а следовательно, и количество контролируемых параметров, имеющих различную физическую сущность, могут изменяться в различных интервалах времени функционирования или контроля.
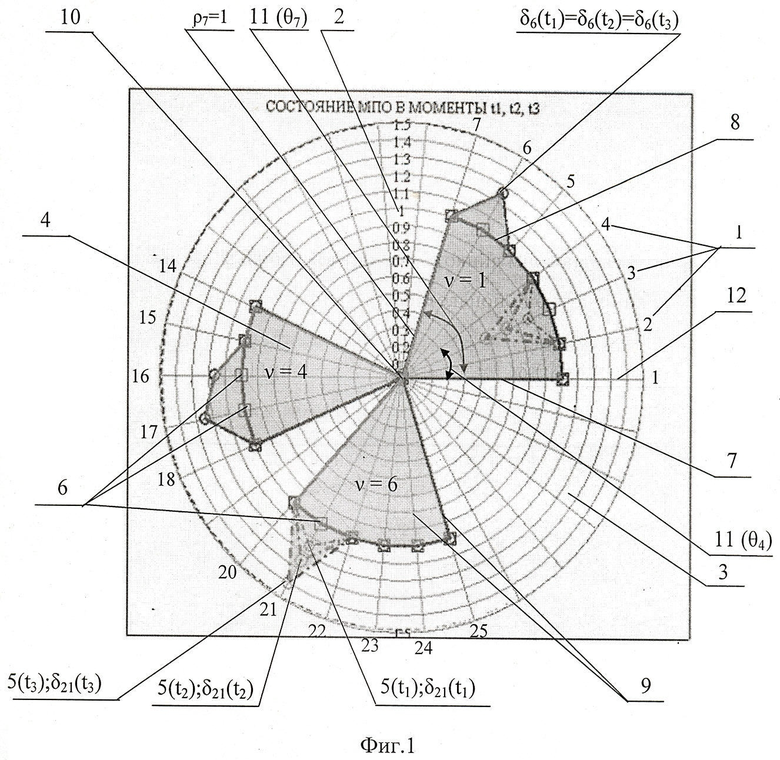
На фиг.1 показана совмещенная цветографическая форма представления результатов комплексного контроля состояния технического МПО в моменты времени tк, к=1, 2, 3 окончания заданных временных интервалов.
На фиг.2 показана совмещенная цветографическая форма представления результатов комплексного контроля состояния финансового МПО в моменты времени tк, к=1, 2, 3 окончания заданных временных интервалов.
В таблице 1 приведены Наименования, идентификаторы, оцененные и допустимые значения параметров состояния технического МПО.
В таблице 2-4 приведены матрицы состояния технического МПО в моменты времени окончания измерений tf=1, tf=2 и tf=3 соответственно.
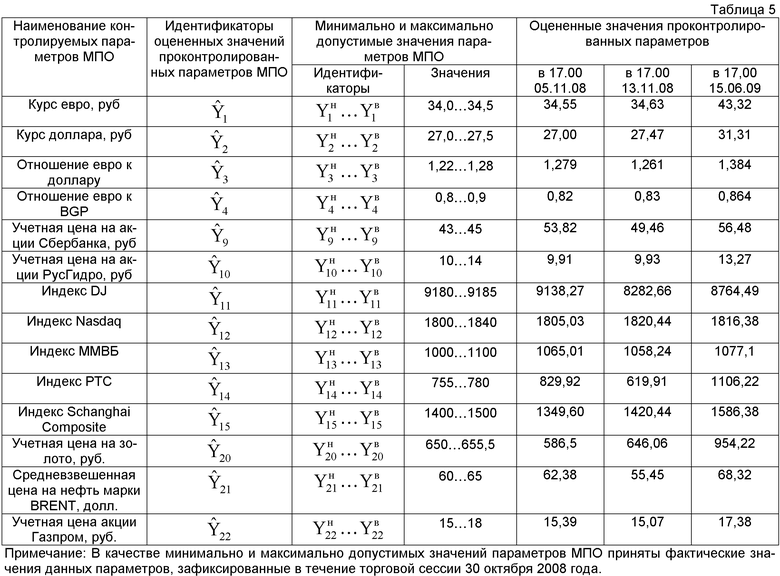
В таблице 5 приведены наименования, идентификаторы, оцененные и допустимые значения параметров состояния финансового МПО.
В таблицах 6-8 приведены матрицы состояния финансового МПО в моменты времени окончания измерений tf=1, tf=2 и tf=3 соответственно.
В таблицах 9-11 приведены результаты допусковой оценки факта и направления изменения параметров технического МПО с помощью способа прототипа на временных интервалах tf=0-tf=1, tf=1-tf=2 и tf=2-tf=3 соответственно.
В таблице 12 приведены результаты оценки состояния параметров технического МПО с помощью способа-прототипа.
В таблицах 13-15 приведены результаты допусковой оценки факта и направления изменения параметров финансового МПО с помощью способа прототипа на временных интервалах tf=0-tf=1, tf=1-tf=2 и tf=2-tf=3 соответственно.
В таблице 16 приведены результаты оценки состояния параметров финансового МПО с помощью способа-прототипа.
На фиг.1 показаны:
номера контролируемых параметров 1; шкала 2 для определения значений признаков соответствия оцененных и допустимых значений контролируемых параметров объекта контроля; полярная система координат 3; цветографическая форма 4; метки 5 значений признаков соответствия оцененных и допустимых значений контролируемых параметров в моменты времени t1, t2, t3; метки 6 эталонных значений признаков соответствия оцененных и допустимых значений контролируемых параметров; линия 7 границы фигуры образа состояния объекта; линия 8 границы фигуры эталонного образа; полярные радиусы 9; полюс полярной системы координат 10; полярные углы 11; полярная ось 12.
В соответствии с заявляемым способом, в каждом заданном временном интервале с момента времени t=t0 начала сбора разнородных данных Yi={yij} о состоянии многопараметрического объекта, имеющего номер i, проводят  измерений значений каждого из назначенных для контроля параметров. Фиксируют время окончания измерений tf∈[t0,tк]. Затем в интервале tf<t<tк в соответствии с введенными до начала сбора данных правилами, по измеренным значениям yijn,
измерений значений каждого из назначенных для контроля параметров. Фиксируют время окончания измерений tf∈[t0,tк]. Затем в интервале tf<t<tк в соответствии с введенными до начала сбора данных правилами, по измеренным значениям yijn,  , формируют совокупность
, формируют совокупность  оцененных значении параметров.
оцененных значении параметров.
Далее проверяют выполнение условий  и вычисляют величины
и вычисляют величины  ,
,  являющиеся признаками и мерой несоответствия или соответствия оцененных значений параметров объекта контроля допустимым значениям:
являющиеся признаками и мерой несоответствия или соответствия оцененных значений параметров объекта контроля допустимым значениям:
 .
.
Для удобства величины  ,
,  далее в тексте интерпретируются как признаки соответствия оцененных значений параметров объекта контроля допустимым значениям.
далее в тексте интерпретируются как признаки соответствия оцененных значений параметров объекта контроля допустимым значениям.
Затем формируют матрицу δi состояния объекта контроля, элементам которой присваивают вычисленные значения признаков соответствия  , имеющую структуру и размерность матрицы Yi контролируемых параметров объекта, которые группируют по видам ν=1,…,ν* контроля, соблюдая при этом общую нумерацию. Порядок расположения, сгруппированных по видам контроля значений признаков соответствия в матрице δi, представлен в таблице 2. Наличие в матрице значений элементов, равных нулю, означает, что в заданном временном интервале параметры с номерами, соответствующими номерам элементов матрицы, содержащих ноль, не контролируются.
, имеющую структуру и размерность матрицы Yi контролируемых параметров объекта, которые группируют по видам ν=1,…,ν* контроля, соблюдая при этом общую нумерацию. Порядок расположения, сгруппированных по видам контроля значений признаков соответствия в матрице δi, представлен в таблице 2. Наличие в матрице значений элементов, равных нулю, означает, что в заданном временном интервале параметры с номерами, соответствующими номерам элементов матрицы, содержащих ноль, не контролируются.
Используя матрицу δi состояния в P(ρij,θij) - полярной системе координат 3 формируют и отображают цветографическую форму 4 (фиг.1), которая содержит результаты допусковой оценки каждого из контролируемой совокупности параметров, формализованные в виде фигуры, ограниченной замкнутой ломаной линией 7, соединяющей множество  меток 5, координаты расположения которых формируют, присваивая значениям ρij полярных радиусов 9 вычисленные значения признаков δij соответствия оцененных и допустимых значений контролируемых параметров и вычисляя значения θij углов 11 поворота радиусов относительно полярной оси 12.
меток 5, координаты расположения которых формируют, присваивая значениям ρij полярных радиусов 9 вычисленные значения признаков δij соответствия оцененных и допустимых значений контролируемых параметров и вычисляя значения θij углов 11 поворота радиусов относительно полярной оси 12.
Формализацию осуществляют по следующим, унифицированным для всех контролируемых параметров правилам.
В случае если оцененные значения  находятся в интервалах допустимых значений, в полярной системе координат 3 фиксируют метки 5
находятся в интервалах допустимых значений, в полярной системе координат 3 фиксируют метки 5  с координатами (ρij,θij) на окружности, где
с координатами (ρij,θij) на окружности, где  - радиус и θij - угол его поворота относительно полярной оси 12 (фиг.1). Значения углов θij вычисляются по формуле:
- радиус и θij - угол его поворота относительно полярной оси 12 (фиг.1). Значения углов θij вычисляются по формуле:
где:  , ω - градусная мера радиана.
, ω - градусная мера радиана.
В случаях если оцененные значения  находятся вне интервалов допустимых значений, фиксируют метки 5
находятся вне интервалов допустимых значений, фиксируют метки 5  с координатами (ρij,θij), не находящиеся на окружности единичного радиуса, так как
с координатами (ρij,θij), не находящиеся на окружности единичного радиуса, так как  , а
, а  . Все зафиксированные метки 5 последовательно, начиная с первой, соединяют линией 7. При этом формируются и при визуальном отображении наблюдаются изломы линии в местах расположения меток 5, не находящихся на окружности единичного радиуса (фиг.1).
. Все зафиксированные метки 5 последовательно, начиная с первой, соединяют линией 7. При этом формируются и при визуальном отображении наблюдаются изломы линии в местах расположения меток 5, не находящихся на окружности единичного радиуса (фиг.1).
Количество и номера всех зафиксированных меток 5 на окружности и вне ее соответствуют числу j* и номерам 1 контролируемых параметров объекта контроля. Направление, относительные величины изломов линии формируют по результатам анализа ситуации, при которой зафиксировано отклонение оцененного значения параметра от нижней  или верхней
или верхней  границы допуска.
границы допуска.
Сформированную фигуру интерпретируют как цветографический образ (ЦГО) состояния объекта контроля в момент tf, f=1,…,f* окончания измерений. В общем случае количество моментов tf соответствует количеству моментов tк, к=1,…,к* окончания заданных интервалов времени получения данных о результатах комплексного контроля состояния многопараметрического объекта.
Для оперативного визуального выявления фактов соответствия и несоответствия фактического состояния объекта установленным нормам в этой же системе координат 3 формируют фигуру, граничная линия 8 которой соединяет расположенные на окружности j* меток 6  другого типа с координатами (ρij=1, θij) и интерпретируют ее как эталонный цветографический образ состояния объекта контроля, который соответствует случаю, когда значения всех контролируемых параметров находятся в границах допусков, а значения признаков соответствия равны единице. Матрица значений признаков соответствия для формирования эталонного ЦГО имеет размерность и структуру матрицы контролируемых параметров.
другого типа с координатами (ρij=1, θij) и интерпретируют ее как эталонный цветографический образ состояния объекта контроля, который соответствует случаю, когда значения всех контролируемых параметров находятся в границах допусков, а значения признаков соответствия равны единице. Матрица значений признаков соответствия для формирования эталонного ЦГО имеет размерность и структуру матрицы контролируемых параметров.
Далее после формирования эталонного ЦГО совмещают цветографические формы, сформированные в предыдущих и в последнем (текущем) заданных временных интервалах. Фиксируют по изменениям координат меток 5, имеющих одинаковые номера в совмещаемых ЦГО, факты наличия, тенденции, значения и величины изменений признаков соответствия параметров объекта.
Из значений признаков соответствия, с учетом последовательности их получения, а также фиксирования моментов окончания измерений формируют временные ряды {δij(t), t}, по содержимому которых для более точного определения формы, числовых характеристик тенденций изменений формируют модель изменения признаков во времени  , где: а0, a1,… - коэффициенты модели, вычисленные по значениям временного ряда; t={tf} - совокупность моментов времени окончания измерений в заданных временных интервалах; Fj - оператор, определяющий форму зависимости.
, где: а0, a1,… - коэффициенты модели, вычисленные по значениям временного ряда; t={tf} - совокупность моментов времени окончания измерений в заданных временных интервалах; Fj - оператор, определяющий форму зависимости.
Сформированные временные ряды при необходимости используют как исходные данные для определения динамических и корреляционных свойств контролируемых параметров при выявлении причин, а также при определении возможных последствий изменения состояния объекта контроля. Для этого экстраполируют, получают точечную  и интервальную
и интервальную  оценки значений параметров объекта, при которых может возникнуть критическая ситуация, и фиксируют моменты времени
оценки значений параметров объекта, при которых может возникнуть критическая ситуация, и фиксируют моменты времени  прогнозируемого достижения этих значений [1. Дж. Бендат, А.Пирсол. Прикладной анализ случайных данных. Москва, Мир, 1989, с.106-117. 2. Елисеева И.И., Юзбашев М.М. Общая теория статистики, Москва, Финансы и Статистика, 1995, с.245-256, с.304-313].
прогнозируемого достижения этих значений [1. Дж. Бендат, А.Пирсол. Прикладной анализ случайных данных. Москва, Мир, 1989, с.106-117. 2. Елисеева И.И., Юзбашев М.М. Общая теория статистики, Москва, Финансы и Статистика, 1995, с.245-256, с.304-313].
Таким образом, совокупность существенных признаков предлагаемого способа комплексного контроля состояния многопараметрического объекта проявляет новые свойства способа, заключающиеся в том, что:
- унифицированное преобразование результатов допусковой оценки значений каждого из контролируемых в заданном временном интервале параметров в значения признаков соответствия и последующее их использование при формировании цветографической формы позволяет оперативно объединить и одновременно компактно представить разнородные данные о состоянии объекта и его изменениях, полученные в результате осуществленных различных видов контроля вне зависимости от количества контролируемых параметров, их физической сущности и единиц измерения, что существенно расширяет функциональные возможности способа, а также повышает точность распознавания, представления вида состояния и определения причин и последствий аномального функционирования объекта контроля;
- совмещением цветографических форм, сформированных в различных временных интервалах, обеспечивается представление необходимых данных в виде временных рядов, использование которых позволяет более точно определить форму, числовые характеристики тенденций изменения и корреляционные свойства контролируемых параметров в процессе выявления причин, а также при определении возможных последствий изменения состояния объекта контроля.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, идентичных всем признакам заявляемого технического решения, отсутствуют, что указывает на соответствие заявляемого изобретения критерию охраноспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными признаками заявляемого способа, показали, что в общедоступных источниках информации не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками.
Из уровня техники также не подтверждена известность влияния отличительных признаков заявляемого изобретения на указанный заявителем технический результат, следовательно, заявляемое изобретение соответствует условию «изобретательский уровень».
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартное оборудование и материалы.
Возможность осуществления предлагаемого способа комплексного контроля состояний МПО по разнородной измерительной информации подтверждается следующими примерами.
Пример 1. Предположим, что в моменты времени t1, t2, t3 окончания заданных временных интервалов необходимо представить результаты комплексного контроля состояния пространственно-распределенного технического многопараметрического объекта по измеренным значениям 18 разнородных параметров, наименования, идентификаторы и допустимые значения которых приведены в таблице 1. При этом полагаем, что параметры МПО, имеющие номера с 8 по 13, 19 и с 26 по 30 на заданных временных интервалах не контролировались, и по этой причине их наименования, идентификаторы и допустимые значения в таблице 1 не приведены.
В связи с вышеизложенным для рассматриваемого объекта в заданных временных интервалах комплексный контроль включает три вида контроля (контроль в инфракрасном диапазоне длин волн, радио-контроль, оптический контроль), имеющих номера ν=1,4,6. Контролируемые параметры сгруппированы по видам контроля. Так, при ведении контроля, имеющего номер ν=1, контролируются параметры с номерами j=1,…,7. При ведении контроля, имеющего номер ν=4, контролируются параметры с номерами j=14,…,18. При ведении контроля, имеющего номер ν=6, контролируются параметры с номерами j=20,…,25. В первом заданном временном интервале Δt1=[t0,tк=1] после проведения и фиксации момента окончания измерений tf=1, оценивания значения каждого контролируемого параметра, сравнения оцененных значений  с допустимыми значениями
с допустимыми значениями  , преобразовывают результаты допусковой оценки путем вычисления значений признаков соответствия δj по правилам (1), формируют матрицу δ(t1) состояния МПО. Структура и содержание матрицы приведены в таблице 2. При этом элементы матрицы, имеющие номера, совпадающие с номерами неконтролируемых параметров, т.е. с 8 по 13, 19 и с 26 по 30, и содержащие нулевые значения, в таблице 2 не представлены.
, преобразовывают результаты допусковой оценки путем вычисления значений признаков соответствия δj по правилам (1), формируют матрицу δ(t1) состояния МПО. Структура и содержание матрицы приведены в таблице 2. При этом элементы матрицы, имеющие номера, совпадающие с номерами неконтролируемых параметров, т.е. с 8 по 13, 19 и с 26 по 30, и содержащие нулевые значения, в таблице 2 не представлены.
Далее определяют значения углов θj по формулам (2).
В полярной системе координат по правилам (1) формируют и отображают цветографическую форму (фиг.1), соответствующую образу состояния МПО в момент tf=1 окончания измерений во временном интервале Δt1, используя при этом в качестве исходных данных значения признаков соответствия из таблицы 2.
Далее во втором и в третьем временных интервалах выполняют ту же последовательность действий и формируют в той же системе координат цветографические формы (фиг.1), соответствующие образам состояния МПО в моменты tf=2 и tf-3 окончания измерений во временных интервалах Δt2, Δt3, используя при этом в качестве исходных данных значения признаков соответствия из таблиц 3 и 4.
Определяют по изменениям координат расположения меток с одинаковыми номерами в совмещаемых образах (фиг.1) факты наличия несоответствия оцененных допустимым значениям контролируемых параметров и факты наличия изменений значений признаков соответствия, относительные величины, тенденции (направления) их изменений, а именно:
- тенденцию к уменьшению значений признаков соответствия δ3(t1)≻δ3(t2)≻δ3(t3);
- факты не изменяющихся во времени значений признаков соответствия δ6(t1)=δ6(t2)=δ6(t3), δ16(t1)=δ16(t2)=δ16(t3), δ17(t1)=δ17(t2)=δ17(t3);
- тенденцию к увеличению значений признаков соответствия δ21(t1)≺δ21(t2)≺δ21(t3).
Пример 2. Последовательно выполнив указанную в примере 1 последовательность действий, можно представить в виде фиг.2 состояния финансового многопараметрического объекта по зафиксированным в моменты времени t1, t2 и t3 значениям 14 разнородных параметров, включающих курсы валют, индексы бирж в отдельных регионах мира и цены на акции банков, предприятий и на отдельные виды сырья [6. Еженедельники «Экономика и жизнь» от 09.11. и 16.11.2008 года. 7. www.rbc.ru]. Наименования, идентификаторы, оцененные и допустимые значения контролируемых параметров приведены в таблице 5, а вычисленные с использованием правил (1) количественные значения признаков соответствия приведены в таблицах 6-8. При этом полагаем, что параметры МПО, имеющие номера с 5 по 8, с 16 по 19 и 23 на заданных временных интервалах не контролируются, и по этой причине их наименования, идентификаторы и допустимые значения в таблице 5, а также количественные значения признаков соответствия для данных параметров в таблицах 6-8 не приведены.
На фиг.2 выделены три группы контролируемых параметров: группа 1 - курсы валют (υ=1), группа 3 - индексы бирж в отдельных регионах мира (υ=3); группа 6 - цены на акции банков, предприятий и на отдельные виды сырья (υ=6).
Определяют по изменениям координат расположения меток с одинаковыми номерами на совмещенных образах (фиг.2) факты наличия, тенденции, значения и величины изменений признаков соответствия параметров объекта. Так, например, на фиг.2 определены:
- тенденция к увеличению значений признаков соответствия δ1(t1)≺δ1(t2)≺δ1(t3);
- факты волотильности, т.е. попеременного увеличения и уменьшения, признаков соответствия δ9(t1)≻δ9(t2) и δ9(t3)≻δ9(t1); δ21(t1)≻δ21(t2) и δ21(t3)≻δ21(t1).
Аналогичным образом может быть определено наличие и ряда других фактов изменений во времени значений признаков соответствия, представленных на фиг.2.
Таким образом, на совмещенных цветографических формах для различных типов МПО (фиг.1 и 2) фиксируются:
- номера параметров МПО, в том числе и имеющих аномальные значения признаков соответствия;
- относительные величины несоответствия оцененных и допустимых значений параметров МПО по значениям признаков соответствия;
- тенденции к увеличению или уменьшению аномальных значений признаков соответствия и их колебания.
Далее из зафиксированных последовательностей признаков соответствия и моментов времени окончания измерений формируют временные ряды {δj(tf),tf}, f=1,2,3…, которые используют в качестве исходных данных при формировании модели для более точного определения формы и числовых характеристик тенденций изменения значений контролируемых параметров.
Для сравнения функциональных возможностей заявленного способа и прототипа авторами дополнительно с использованием операций способа-прототипа получены:
- результаты допусковой оценки факта и направления изменения параметров:
технического МПО (таблицы 9-11);
финансового МПО (таблицы 13-15);
- результаты интегральной оценки состояний:
технического МПО (таблица 12);
финансового МПО (таблица 16).
Как следует из таблиц 12 и 16, прототип обеспечивает представление интегрального состояния МПО в виде относительных долей параметров, сохраняющих свое значение или имеющих увеличивающиеся или уменьшающиеся значения на каждом из заданных временных интервалов.
Вместе с тем при использовании прототипа возникают неопределенности при формировании классов состояния параметров МПО Кс и Кр.
Так, например, в соответствии с логикой прототипа к классу Кс на каждом последующем временном интервале необходимо относить и параметры с аномальными, но не изменившимися по сравнению с предыдущим временным интервалом значениями (такими параметрами для технического МПО являются параметры с №№6, 16 и 17 (см. таблицу 10 и 11).
Применительно к финансовому МПО по логике прототипа в класс Кр необходимо включать и параметры, рост которых обеспечил нормальное значение (такими параметрами на втором временном интервале являются параметры с №15 и 20 (см. таблицы 6 и 14), а на третьем - параметр №10 (см. таблицы 7 и 15) соответственно).
Кроме того, для финансового МПО на первом и втором временных интервалах относительная величина оцененного класса Кп остается равной 28,57% (см. таблицу 16), но при этом прототип не в состоянии отразить факт 100% изменения состава параметров, образующих данный класс (см. таблицы 13 и 14). Более того, прототип не в состоянии отразить и факты волотильности (т.е. фактов попеременного роста и падения) аномальных значений параметров МПО.
Таким образом, прототип не обеспечивает достаточной точности оценки состояния МПО, что в свою очередь приводит к ошибочному выбору управляющих воздействий на параметры объекта.
Заявленный же способ в отличие от прототипа позволяет оперативно устанавливать не только общее количество параметров МПО, имеющих аномальные значения, в том числе и параметров с не изменяющимися в течение одного или нескольких заданных временных интервалов аномальными значениями признаков соответствия, но и более точно определять направления и числовые характеристики изменения аномальных значений контролируемых параметров.
Таким образом, заявленный способ по сравнению с прототипом обеспечивает повышение точности комплексного контроля состояния различных типов многопараметрических объектов по разнородной измерительной информации за счет расширения функциональных возможностей.

































| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЛЕКСНОГО КОНТРОЛЯ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ПО РАЗНОРОДНОЙ ИНФОРМАЦИИ | 2019 |
|
RU2719467C1 |
| Способ комплексного мониторинга и управления состоянием многопараметрических объектов | 2016 |
|
RU2627242C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОБРАБОТКИ И АНАЛИЗА ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2557477C2 |
| Способ прогнозирования кризисных ситуаций при контроле многопараметрических процессов | 2016 |
|
RU2653286C2 |
| СПОСОБ ОПЕРАТИВНОГО ДИНАМИЧЕСКОГО АНАЛИЗА НЕЧЕТКОГО СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 1999 |
|
RU2156496C1 |
| СПОСОБ КОМПЛЕКСНОГО МОНИТОРИНГА СОСТОЯНИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ И СИСТЕМ | 2014 |
|
RU2574083C2 |
| СИСТЕМА ГЛОБАЛЬНОГО МОНИТОРИНГА В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ ПАРАМЕТРОВ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2568291C1 |
| СПОСОБ ЦВЕТОВОГО ПРЕДСТАВЛЕНИЯ И АНАЛИЗА ДИНАМИКИ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 1998 |
|
RU2150742C1 |
| СПОСОБ ОПЕРАТИВНОГО ДИНАМИЧЕСКОГО АНАЛИЗА СОСТОЯНИЙ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА | 1998 |
|
RU2134897C1 |
| СПОСОБ СЛОВЕСНО-ЛОГИЧЕСКОГО ПРЕДСТАВЛЕНИЯ И АНАЛИЗА ДИНАМИКИ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 2002 |
|
RU2261468C2 |
Изобретение относится к способам осуществления комплексного контроля состояния многопараметрических объектов (динамических систем, процессов) по разнородной измерительной информации и может быть использовано в системах распознавания образов, диагностики, а также в системах управления объектами (динамическими системами, процессами) в технической и социальной сферах деятельности. Техническим результатом является расширение функциональных возможностей и повышение точности комплексного контроля состояния многопараметрического объекта по разнородной измерительной информации. Способ контроля содержит этапы, в которых: результаты сравнения оцененных с допустимыми значениями и характеристики изменений каждого контролируемого параметра объекта формируют и представляют по унифицированным для всех параметров правилам, в соответствии с которыми вычисляют значения признаков соответствия оцененных и допустимых значений параметров; формируют матрицу состояния объекта контроля, элементам которой присваивают вычисленные значения признаков соответствия; формируют цветографическую форму; сформированную фигуру интерпретируют как образ состояния объекта контроля в заданном временном интервале. 2 ил., 16 табл., 2 пр.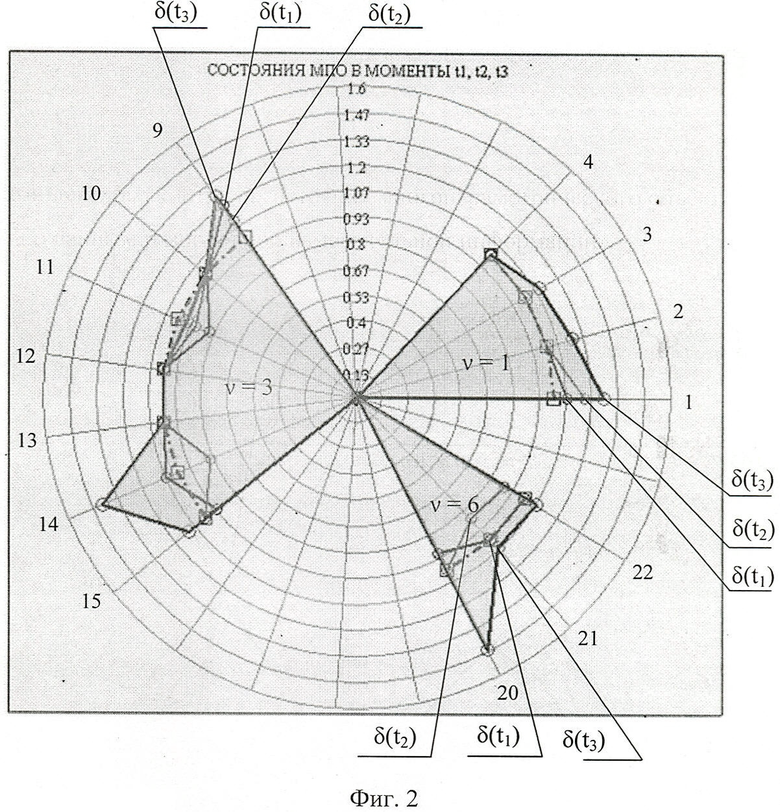
Способ комплексного контроля состояния многопараметрического объекта по данным разнородной измерительной информации, заключающийся в оперативном преобразовании результатов допусковой оценки параметров в соответствующие информационные цветовые сигналы видимого спектра в зависимости от результатов допусковой оценки, факта и направления изменения динамического параметра с обобщением по всему множеству параметров на заданном временном интервале и их отображении посредством цветокодовой матрицы-диаграммы, отличающийся тем, что на заданном временном интервале результаты допусковой оценки контролируемых параметров объекта преобразуют в цветографическую форму и отображают ее по формируемым до начала измерений правилам, в соответствии с которыми фиксируют оцененные значения параметров и моменты времени окончания измерений, вычисляют значения признаков соответствия оцененных и допустимых значений путем деления оцененных на максимально допустимые значения контролируемых параметров объекта, если оцененные больше максимально допустимых, или делят оцененные на минимально допустимые значения, если оцененные меньше минимально допустимых, при этом значению признаков соответствия присваивают единицу, если оцененные значения параметров находятся в интервале их допустимых значений, затем формируют матрицу состояния многопараметрического объекта контроля, количество и номера элементов которой соответствуют количеству и номерам контролируемых параметров объекта, при этом элементам матрицы присваивают вычисленные значения признаков соответствия, после чего формируют цветографическую форму, представляющую собой сформированную в полярной системе координат фигуру, которую интерпретируют как образ состояния объекта контроля в момент окончания измерений в заданном временном интервале, при этом для образования границ фигуры линией соединяют метки, координаты расположения которых определяют по значениям полярных радиусов, соединяющих полюс полярной системы координат с метками и полярных углов между радиусами и полярной осью, причем значениям радиусов присваивают значения признаков соответствия, а значения углов находят умножением величины отношения градусной меры полного круга, разделенной на количество контролируемых параметров, к градусной мере радиана, на номер параметра, затем совмещают предыдущие и последний из сформированных образов, определяют по изменениям координат расположения меток с одинаковыми номерами в совмещаемых образах факты наличия, величины, тенденции изменений значений признаков соответствия и с учетом последовательности их получения, а также фиксирования моментов окончания измерений формируют временные ряды для определения формы и числовых характеристик тенденций изменений контролируемых параметров и состояния объекта контроля.
| RU 2138849 C1, 27.09.1999 | |||
| Микроманипулятор | 1973 |
|
SU493053A1 |
| СПОСОБ ОПЕРАТИВНОГО АНАЛИЗА УСТОЙЧИВОСТИ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА | 2000 |
|
RU2176811C1 |
| СПОСОБ ОПЕРАТИВНОЙ ДИАГНОСТИКИ СОСТОЯНИЙ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ПО ДАННЫМ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 2009 |
|
RU2403619C1 |

