Освоение арктического шельфа Арктики требует оснащение средствами приема и доставки углеводородов, добываемых с помощью подводных скважин потребителям, расположенным в восточной части Ледовитого океана. Доставка нефти с помощью танкеров-ледоколов в район Тихого океана обходится очень дорого.
Разработка и создание танкерных судов ледового класса по классической схеме, оснащенных атомными установками с приводом винтов от турбин слишком дорогое удовольствие и окупается очень медленно.
Для перемещения ограниченных объемов углеводородного сырья и для дозаправки подводных и надводных судов используются подводные лодки. Однако для решения проблемы переброски больших объемов требуются специальные суда, приспособленные для работы в жестких арктических условиях.
Классическая схема подводного судна - подводной лодки представляет собой замкнутую герметичную систему с высокопрочным металлическим корпусом, включающую: атомную энергетическую установку, турбины, генераторы, аккумуляторы, электродвигатели и комплекс вооружения, подсистемы управления судном, жилую зону экипажа, включающую регенераторы воздуха, опреснители, запасы пищи и многое другое.
Для подводного судна, при современном уровне автоматики, не требуется наличие экипажа, что в корне меняет концепцию построения. Судно пригодное для доставки углеводородов в различные арктические районы не требует прочного герметичного корпуса и системы жизнеобеспечения.
Учитывая, что скорость доставки углеводородов не лимитирована временем, и существенно не влияет на ее конечную цену, есть смысл создавать автоматические танкеры, движущиеся с малой скоростью подо льдами Ледовитого океана. Мощность потребных энергетических установок, приводящих в движение такие танкерные суда, снижается на порядок.
Подводное судно - танкер для отбора и перевозки углеводородов для выполнения своей задачи требует сохранения следующих необходимых подсистем характерных для подводной лодки: емкости для размещения нефтепродуктов, энергетическую установку, движитель, использующий тот или иной принцип, а также автоматическую навигационную систему управления танкером.
Учитывая специфику работ по извлечению нефти и газа с подводного положения с помощью вышек и подводных платформ, располагаемых на глубине, появляется необходимость выполнения ряда операций по загрузке танкеров перенести туда же, что создаст серьезную экономию и независимость от погодных условий на поверхности океана. В настоящее время уже созданы надежно функционирующие заправочные станции для морских буровых станций и выполнение таких же операций под водой не представляется неразрешимой проблемой.
Сейчас уже ясны требования к подводному танкерному комплексу, оптимально приспособленному для работы с подводными инфраструктурами, необходимому в настоящее время для извлечения нефтепродуктов и газа на шельфе Ледовитого океана и других районов мирового океана.
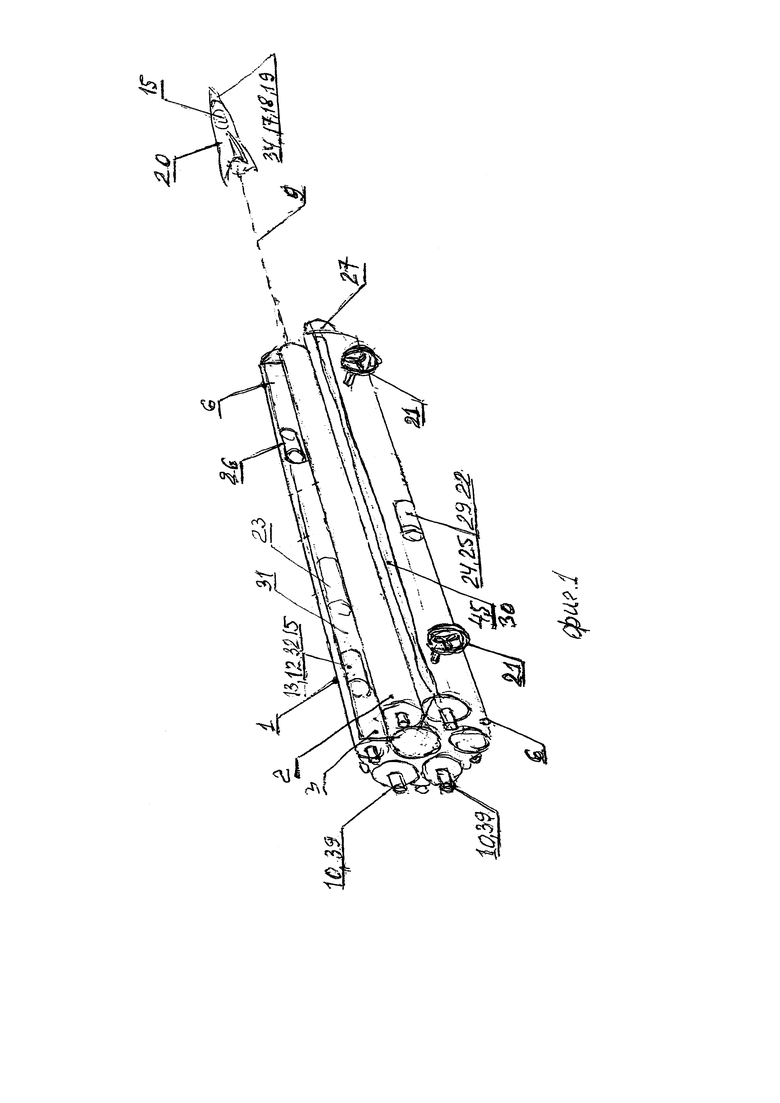
Такое подводное судно - танкер целесообразно разбить на три функционально независимых части: танкерный модуль с емкостями для размещения углеводородов, атомную энергетическую установку с движителем и лоцманский глайдер, см. фиг. 1.
Перечисленные составляющие танкерного комплекса, способные функционировать как автономно, так и под управлением общей программы. При необходимости, указанные части можно связывать между собой механически и программно, в любом сочетании, с учетом поставленной конкретной задачи.
Первая часть танкерного комплекса - танкерный модуль должна представлять жесткую прочную конструкцию, с возможностью размещения разнообразного груза, а также балласта, необходимого для балансировки судна в процессе его загрузки углеводородами, имеющими более низкий удельный вес по сравнению с водой. Для возможности автономного движения на нем должны быть установлены реверсивные управляемые электродвигатели с вентиляторами, обеспечивающими, как перемещение танкера в ограниченном пространстве, так и пространственную ориентацию танкерного модуля в процессе его стыковки с подводной заправочной станцией или подводной буровой установкой.
Вторая часть подводного танкерного комплекса - атомная энергетическая установка оснащена движителем, непосредственно преобразующим пар высокого давления, в движение за счет выдавливания воды, в поршневую систему.
Соединение атомной энергетической установки с движителем, любой конструкции, превращает ее в «подводный буксир».
В качестве основы для такого «подводного буксира». целесообразно использовать:
«Подводной атомной станции См. «24 часа» №51 (1683) 21 декабря 2017 г.
«Добыча полезных ископаемых на шельфах - задача нелегкая. Глубина работ возрастает, и обычные морские платформы скоро уже не смогут справляться со своей задачей. А поэтому ученые планируют использовать для глубоководных работ роботов.
Но тут возникает проблема. Роботу необходим источник питания, и чем ближе он будет размещен к месту производимых работ, тем лучше. С учетом этих условий российское Центральное конструкторское бюро морской техники «Рубин» совместно с Фондом перспективных исследований разработало атомную подводную зарядную станцию. Станция прошла сертификацию в соответствии с требованиями норм безопасности Международного агентства по атомной энергии и уже проходит испытания. Выглядит она как отдельный модуль подводной лодки, разбитый на отсеки, в которых расположены: атомный реактор мощностью 24 мегаватта, турбогенераторная установка, электрооборудование, системы управления и подзарядки. Станция не способна передвигаться самостоятельно и будет закрепляться на месте с помощью якорей.
Первую станцию опустят на дно Северного Ледовитого океана в 2020 году. Впоследствии планируется установить сеть таких станций, которые будут способны работать автономно на протяжении 30 лет. Эти станции смогут проводить одновременную зарядку нескольких «подводных роботов».
Такая станция, дооснащенная паровым водометным движителем, может стать основой энергетического блока подводного танкера и сможет обеспечить его движение в подводном положении неограниченное время.
Атомный энергетический блок в составе подводного танкера, обладая способностью к самостоятельному движению, позволит перемещать подводный танкер в заданной район, как в надводном положении, так и в подводном, подо льдами Ледовитого океана.
Лоцманский глайдер - третья часть танкерного комплекса предназначен для обеспечения безопасного подводного движения, танкерного модуля может быть оснащен полным навигационным оборудованием для независимого движения в ограниченном пространстве или же с минимальным оборудованием при применении его в составе полного комплекса.
Так корпус танкерного модуля, выполняется негерметичным, что снижает требования к прочности корпуса. Основным конструктивным и силовым элементом корпуса танкерного модуля является центральная труба, с грузовыми секциями, расположенными по кругу с эластичными емкостями для загрузки углеводородами или иными жидкостями, также с возможностью размещения любых грузов, вписывающихся в габариты грузовых секций. Центральная труба корпуса подводного модуля, являясь основным силовым элементом корпуса, одновременно предназначена для размещения поршневой части водометного парового движителя, расположенного на атомной энергетической установке, что повышает эффективность работы поршневого водометного движителя.
Подводный танкерный модуль для обеспечения автономного движения оснащается энергетическим агрегатом, на основе топливных элементов, что позволяет вырабатывать электроэнергию для питания, как реверсивных управляющих вентиляторных двигателей, так и управляющих механизмов танкера, с помощью топливных элементов. Топливные элементы представляют весьма эффективный, долговечный, надежный и экологически чистый метод получения электроэнергии, поступающей от топливных элементов, с использованием части перевозимого продукта. Мощность топливных элементов уже сейчас составляет сотни киловатт, что достаточно для обеспечения всех функций танкерного модуля. В ограниченном районе действия танкерный агрегат будет перемещаться самостоятельно с помощью вентиляторных электродвигателей, размещенных на корпусе танкерного агрегата.
Стыковка танкерного модуля с атомной энергетической установкой должна, производится при необходимости переброски груза на значительные расстояния, измеряемые сотнями и тысячами километров.
В качестве возможного варианта движителя совместимого с атомной энергетической установкой предлагается конструкция водометного движителя основанного на принципе, уже зарекомендовавшего себя, парового двигателя.
Пар высокого давления, вырабатываемый атомной энергетической установкой, подается в поршневые камеры и приводит в движение штоки, которые связаны с рабочим поршнем, расположенным внутри цилиндрической трубы корпуса танкера.
При движении поршня, вода выталкивается в пространство трубы и выходит наружу в задней части судна. Истекающая из цилиндра вода придает импульс движения судну. После завершения цикла расширения и понижения температуры пара в камере открывается клапан (клапаны), расположенные на дне поршня. Поршень возвращается в исходное положение, а за счет подсоса уходящей из цилиндра воды, цилиндр вновь заполняется водой.
Стыковка с танкерным модулем производится в зоне расположения его центральной трубы. Хвостовая часть водомета вдвигается в центральную трубу танкерного модуля и жестко фиксируется с ним, создавая единый водометный канал. Центральный компьютер атомной энергетической установки берет на себя управление и контроль всем агрегатированным комплексом с моментом начала стыковки.
Целью настоящего изобретения является создание экономичного способа доставки углеводородов в условиях Арктики на основе функционально самодостаточных агрегатов, из которых можно компоновать танкерные подводные суда для выполнения любой задачи отбора и доставки углеводородов и иных грузов в любую часть Ледовитого океана.
Сущность способа состоит в том, что основано на разнице физических параметров водной среды и углеводородных продуктов, обладающих более низкой плотностью. Это позволяет, производит отбор, заправку и разгрузку углеводородов с минимальными энергетическими затратами. Танкерный модуль причаливает к заправочной подводной или надводной стойке, фиксируют вертикально или под заданным углом относительно заправочной подводной стойки с помощью жестких гидравлических опор, подсоединяют эластичные оболочки к заправочному устройству по очереди или все одновременно, - открывают вентили заправочного устройства и подают жидкий газ или нефтепродукт в эластичные емкости, заполняют оболочки нефтепродуктом до заданного объема, происходит одновременная балансировка заполняемого нефтепродуктами на этой глубине, соединяют передвижное устройство с движителем атомной энергетической установки, одновременно - освобождают устройство от связи с опорами погрузочного терминала, включают программы транспортировки и начало движения устройства в заданный район на установленной глубине.
Таким образом, углеводороды доставляют подо льдом арктического бассейна, состоящем из функционально независимых частей: танкерного модуля с емкостями для размещения углеводородов, атомной энергетической установки с движителем и лоцманского глайдера Устройство скомпоновано так, что, в нижней и верхней секциях танкерного модуля располагаются замкнутые объемы, предназначенные для уравновешивания судна на заданной глубине, реверсивные водяные насосы и баллон со сжатым воздухом для аварийной системы всплытия.
Одновременно в танкерном модуле размещены холодильные агрегаты для удержания заданной температуры перевозимого продукта, а в каждом грузовом отсеке танкерного модуля могут быть размещены две и более эластичных емкостей содержащие как одинаковые, так и разных продукты, внутренние стенки грузовых отсеков танкерного модуля покрыты термоизолирующим материалом, балластные емкости, разнесены от центра танкерного модуля к его краям.
Атомная энергетическая установка оснащена устройством для вскрытия ледяного покрова и выноса на его поверхность аппаратуры связи со спутниковыми навигационными системами.
На фиг. 1, 2 и 3 раскрыта структура подводного танкера, где:
1. Танкерный модуль.
2. Центральная труба.
3. Перегородка.
4. Внутренняя эластичная оболочка.
5. Наружная эластичная оболочка.
6. Наружная пространственная обрешетка.
7. Энергетическая атомная установка.
8. Водометный паровой движитель.
9. Транспортировочный трос-кабель.
10. Запирающий зажим.
11. Заправочное устройство.
12. Подсистема поддержания пространственного равновесия судна.
13. Подсистема удержания судна на заданной глубине.
14. Подсистема управления работой энергетической атомной установки.
15. Комбинированная навигационная система.
16. Лед.
17. Гироинерциальная подсистема ориентации.
18. Спутниковая навигационная подсистема.
19. Астрономическая навигационная подсистема.
20. Лоцманский глайдер.
21. Поворотный реверсивный электродвигатель с вентилятором.
22. Топливные элементы.
23. Баллон для сжатого воздуха.
24. Балластная камера.
25. Реверсивный водяной насос.
26. Воздушный реверсивный насос.
27. Передний люк.
28. Прожектор.
29. Видеокамера.
30. Эластичная емкость.
31. Грузовая камера.
32. Центральная система управления танкерным модулем.
33. Хвостовой конец водометного движителя.
34. Ультразвуковой гидролокатор.
35. Инфракрасный дальномер.
36. Поршень.
37. Шток.
38. Теплоизоляция.
39. Фланец.
40. Ледовый бур.
41. Гидравлическая опора.
42. Подводная заправочная станция.
На фиг. 1 изображен танкерный модуль, поз. 1, где на наружной стороне центральной трубы, поз. 2 расположены продольные перегородки, поз. 3. Перегородки, поз. 3 закрыты наружной пространственной обрешеткой, поз. 6. В сформированных грузовых камерах, поз. 31 по всей длине размещены эластичные емкости, поз. 30, состоящие из наружной эластичной оболочки, поз. 5 и внутренней эластичной оболочки, поз. 4, вложенных одна в другую. С обеих сторон все эластичные оболочки, образующие эластичные емкости, поз. 30 заканчиваются фланцами, поз. 39 с запирающими зажимами, поз. 10 для подсоединения к заправочному устройству, поз. 11. На боковых сторонах корпуса танкерного модуля, поз. 1 расположены, разнесенные по длине корпуса, поворотные реверсивные электродвигателями с вентиляторами, поз. 21, Нижняя грузовая камера, поз. 31 предназначена для размещения топливных элементов, поз. 22, вырабатывающих электроэнергию для питания исполнительных механизмов, и подсистем поддержания пространственного равновесия судна, поз. 12 и удержания его на заданной глубине, поз. 13. В свободном пространстве нижней грузовой камеры располагается замкнутая балластная камера, поз. 24, заполняемая водой при необходимости. Часть верхней грузовой камеры, поз. 31 выполнена герметичной и предназначена для размещения автоматической подсистемы управления танкером, поз. 32, обеспечивающей процессы заправки и разгрузки танкерного модуля, а также его автономное плавание в ограниченном пространстве. Там же располагается и баллон для сжатого воздуха, поз. 23, используемый при аварийном всплытии.
Оболочки эластичных грузовых емкостей выполняются двухслойными, из теплоизолирующего материала. Пространство между наружной и внутренней оболочками может заполняться жидкостью или газом под давлением, что позволяет выдавливать и перемещать нефтепродукты или сжиженный газ из внутренней оболочки в приемные емкости при разгрузке на приемном терминале в надводном положении.
Управляющая система подводного танкерного комплекса организована из независимых подсистем со своими программами.
Так подсистема, расположенная в танкерном модуле обеспечивает:
- поддержания продольного равновесия и балансировку танкерного корпуса на заданной глубине, как при стыковке с подводными терминалами для загрузки и разгрузки, так при его движении в подводном положении,
- управление движением танкерного судна в автономном режиме в процессе маневрирования;
- управление погрузкой и разгрузкой танкерного судна;
Основная система управления танкерным комплексом, расположена на атомной энергетической установке и обеспечивает:
- контроль и управление работой атомной энергетической установки;
- разворачивание программы движения танкера по заданному маршруту;
- балансировку и удержание энергетической установки на заданной глубине движения.
Основная система управления связкой; танкерный модуль + атомная энергетическая установка с движителем + лоцманский глайдер располагаются на атомной энергетической установке. Получаемая информация с комбинированной навигационной системы, включающей: гироинерциальную, магнитную спутниковую, астрономическую, а также упреждающую информацию об опасности, возникающей по курсу движения, снимаемой с гидроакустического, инфракрасного и лазерного дальномеров и приборов визуализации, в том числе и установленных на лоцманском глайдере.
Направление движения лоцманского глайдера задается компьютерной программой с центрального компьютера, расположенного на энергетической установке.
Лоцманский глайдер может быть аппаратурно оснащен полной управляющей системой, что позволит его использовать в сочетании с основным танкерным модулем при проведении работ по добыче углеродосодержащих или сероводородных жидкостей располагаемых на глубине водоемов (озер, морей, океанов):
Лоцманский глайдер может быть связан: с атомной энергетической установкой и трос-кабелем с возможностью двигаться впереди атомной энергетической установки на той же глубине для обеспечения ее безопасности.
Информация с лазерного и инфракрасного дальномеров, а также видеокамеры поступает, в этом случае, через кабель на основной компьютер атомной энергетической установки и используется для упреждающей оценки препятствий, возникающих по ходу движения.
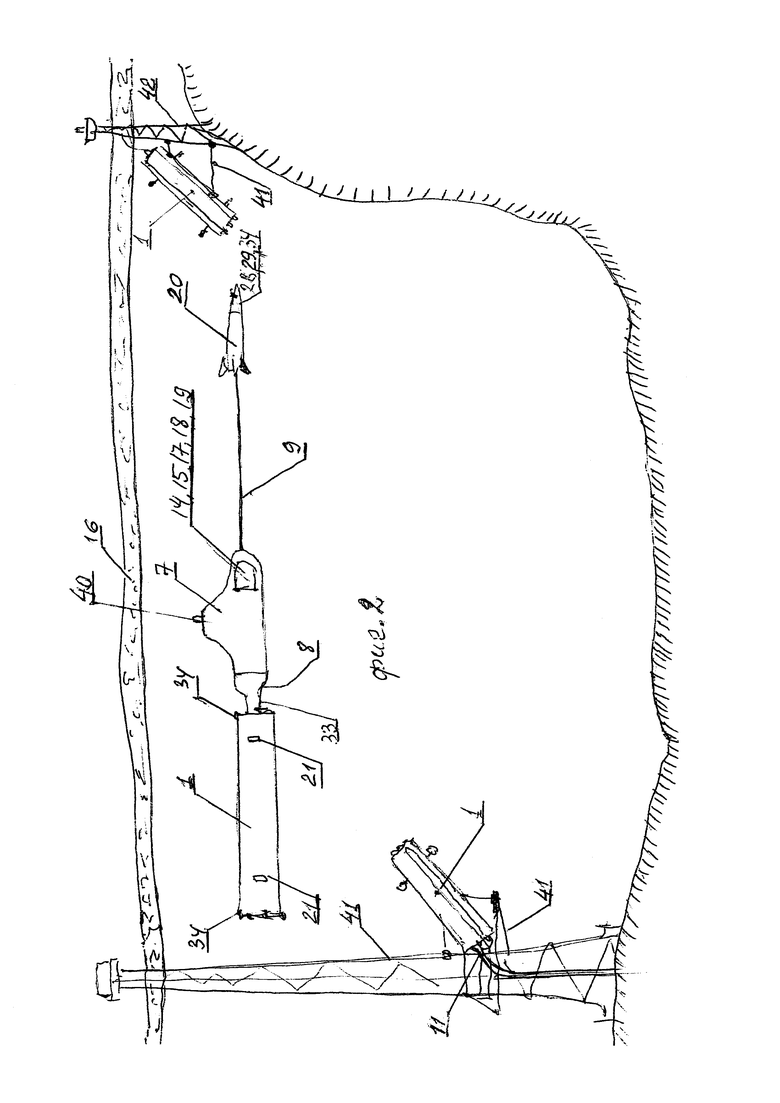
На фиг. 2 показан подводный автоматический танкер в полной комплекции, включающий танкерный модуль, поз. 1, соединенный с атомной энергетической установкой, поз. 7, с водометным движителем, поз. 8 и лоцманским глайдером, поз. 20, где в центральную трубу, поз. 2 танкерного модуля, поз. 1. введен хвостовой конец водометного движителя, поз. 33, размещенного на атомной энергетической установке, поз. 7. В герметичном корпусе атомной энергетической установки размещены: подсистема управления работой энергетической атомной установкой, поз. 14, комбинированная навигационная система, поз. 15, ультразвуковой локатор, поз. 16, гироинерциальная подсистема ориентации, поз. 17, спутниковая навигационная подсистема, поз. 18 и астрономическая навигационная подсистема, поз. 19.
Атомная энергетическая установка, поз. 7 соединена с лоцманским глайдером, поз. 20 трос-кабелем, поз. 9.
Подводный автоматический танкер может комбинироваться в минимальном варианте исполнения для работы в небольшом, ограниченном по дальности районе и может состоять из танкерного модуля, поз. 1 и лоцманского глайдера, поз. 20.
Лоцманский глайдер, поз. 20 укомплектован лазерным, поз. 36, инфракрасным, поз. 35 и ультразвуковым гидролокатором, поз. 34, а также прожектором, поз. 28, с видеокамерой, поз. 29 и сканирующими водное пространство перед судном.
Малая скорость движения подводного танкерного модуля выгодна - малыми энергетическими затратами для движения, как в подводном положении, так и надводном положении.
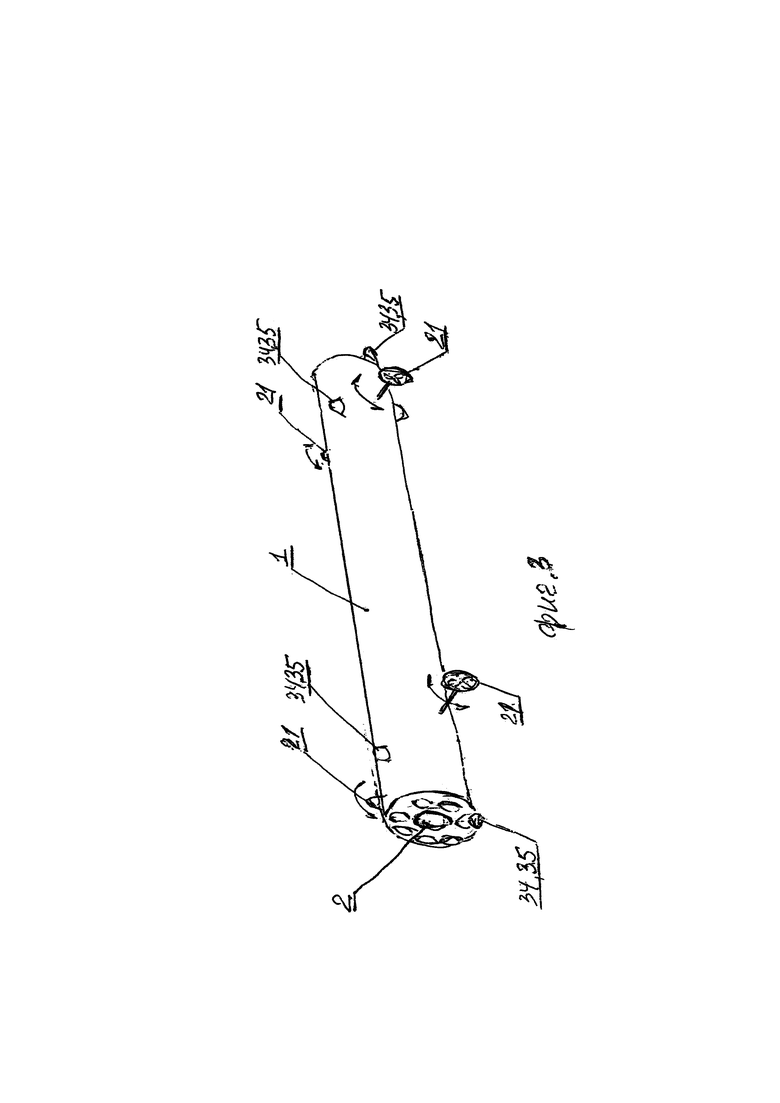
На фиг. 3. показано внешнее оснащение танкерного модуля, где поворотные реверсивные электродвигатели с вентиляторами, поз. 21. Маневрирование и поддержание равновесия танкера производится за счет поворотных реверсивных электродвигателей с вентиляторами, поз. 21. Для обеспечения безопасности при маневрировании и движении танкерного модуля, в передних и задних частях корпуса установлены ультразвуковые гидролокаторы, поз. 34 и инфракрасные дальномеры, поз. 35. Подводные суда, движущиеся с малыми скоростями, должны иметь круговую систему акустической защиты, поскольку опасность подстерегает их с любого направления, поэтому ультразвуковые локаторы, расположены со всех сторон корпуса. Набор приборов установленный на танкерном модуле, включая автономную компьютерную систему позволит эффективно управлять танкером, находящимся, как в процессе движения, так и при стыковке с подводными с загрузочным и приемным терминалами, поз. 11.
Поворотные реверсивные электродвигатели, поз. 21 расположенные с внешней стороны корпуса, по оси корпуса, обеспечивают продольное движение танкера вперед или назад. Двигатели, разворачиваемые перпендикулярно, позволят разворачивать танкер вокруг своей оси. А, за счет их рассогласованного разворота, можно обеспечить любые пространственные развороты и перемещения судна в пространстве при стыковке танкерного модуля, поз. 1 с заправочными устройствами, поз. 11.
Форма судна движущегося под водой, не существенна, так как основные энергетические затраты идут на преодоление трения воды о поверхность судна. Это позволяет использовать простые геометрически выгодные формы для построения конструкции судна, исходя из минимальных затрат материалов для достижения необходимой жесткости всей конструкции.
Атомную энергетическую установку целесообразно оснастить оборудованием для вскрытия отверстия в ледяном панцире - ледовым буром, поз. 40 для возможности выдвижения аппаратуры для связи со спутниковыми навигационными системами и астрономической коррекции местоположения танкерного судна.
С помощью подводного танкера легко организовать добычу, например сероводорода с глубины Черного моря. Дня этого, достаточно поставить его в вертикальное положение, с погружением нижней части судна (кормы) в слой воды, содержащий концентрированный сероводород, открыть нижние задвижки и вода, содержащая концентрированный сероводород, начнет заполнять эластичные приемные емкости. Точно также можно добывать углеводороды и из других водоемов, например, озера Байкал. При длине судна в 100 метров и более, сила глубинного давления настолько велика, что потребуется применение устройств, регулирующих темп заполнения приемных емкостей танкера.
С помощью подводного танкера легко перебрасывать крупногабаритные грузы, например: ракеты и торпеды, поскольку размеры грузовых отсеков могут быть спроектированы с учетом переброски и таких грузов - военного назначения. При соответствующих конструктивных решениях, заимствованных из пусковых систем атомных подводных лодок, такая конструкция подводного танкера может быть легко трансформирована и в пусковую установку. Таким образом, просматривается его универсальность. Малая скорость самостоятельного движения такого судна является положительным моментом, поскольку снижается уровень шума до ничтожных значений, что весьма важно при приближении к территории противника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Морская система транспортировки связанного водорода | 2021 |
|
RU2770042C1 |
| Морская система транспортировки связанного водорода | 2021 |
|
RU2763607C1 |
| Система упреждающего зондирования пространства перед движущимся надводным или подводным судном | 2016 |
|
RU2656984C1 |
| СУДНО | 2005 |
|
RU2286284C2 |
| УНИВЕРСАЛЬНОЕ ПОДВОДНОЕ СООРУЖЕНИЕ "АПЕЛЬСИН" ДЛЯ БУРЕНИЯ СКВАЖИН НА НЕФТЬ/ГАЗ И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2012 |
|
RU2515657C1 |
| МОБИЛЬНОЕ ПОДВОДНОЕ ХРАНИЛИЩЕ ДЛЯ ЖИДКИХ НЕФТЕПРОДУКТОВ | 2023 |
|
RU2820362C1 |
| СУДНО ДЛЯ РАЗРАБОТКИ И ТРАНСПОРТИРОВКИ ЛЬДА АЙСБЕРГОВ | 1994 |
|
RU2041120C1 |
| Арктическая ледорезная машина | 2019 |
|
RU2718192C1 |
| СПОСОБ РАЗРАБОТКИ УГЛЕВОДОРОДНЫХ МЕСТОРОЖДЕНИЙ АРКТИЧЕСКОГО ШЕЛЬФА И ТЕХНИЧЕСКИЕ РЕШЕНИЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2013 |
|
RU2529683C1 |
| ТАНКЕР-ХИМОВОЗ | 2007 |
|
RU2332326C1 |
Изобретение относится к средствам доставки углеводородов в арктическом бассейне. Предложено устройство для доставки углеводородов в арктическом бассейне, состоящее из танкерного модуля с эластическими емкостями для размещения углеводородов, подводного буксира с атомной энергетической установкой и движителем, а также лоцманского глайдера, с возможностью его движения впереди подводного буксира. Танкерный модуль содержит центральную трубу с расположенными на ней продольными перегородками, закрытыми наружной обрешеткой, с размещенными в сформированных грузовых камерах по всей длине эластичными емкостями, состоящими из наружной и внутренней оболочек из теплоизолирующего материала, вложенных одна в другую, причем все эластичные емкости с обеих сторон заканчиваются запирающими устройствами с фланцами для подсоединения к заправочному терминалу, на боковых сторонах корпуса танкерного модуля расположены разнесенные по длине корпуса поворотные реверсивные электродвигатели с гребными винтами, а нижняя камера предназначена для размещения топливных элементов, вырабатывающих электроэнергию для питания исполнительных механизмов, в свободном пространстве верхней и нижней грузовых камер располагаются замкнутые балластные камеры с водяными и воздушными насосами. Технический результат заключается в повышении эффективности доставки углеводородов в арктическом бассейне. 3 н. и 6 з.п. ф-лы, 3 ил.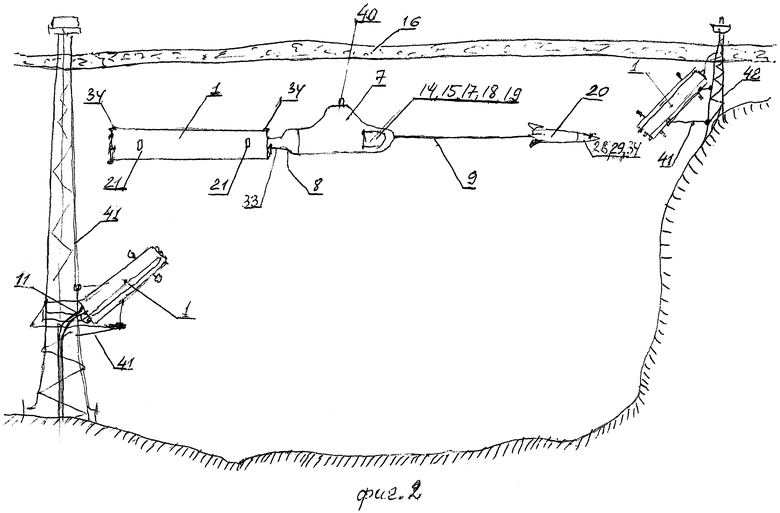
1. Устройство для доставки углеводородов в арктическом бассейне, характеризующееся тем, что оно состоит из танкерного модуля с эластическими емкостями для размещения углеводородов, подводного буксира с атомной энергетической установкой и движителем, а также лоцманского глайдера, с возможностью его движения впереди подводного буксира.
2. Устройство по п. 1, отличающееся тем, что на лоцманском глайдере размещены прожектор, гидроакустический локатор, тепловизор и видеокамера, сканирующие водное пространство перед ним, а также аварийная система всплытия.
3. Танкерный модуль устройства доставки углеводородов в арктическом бассейне, характеризующий тем, что он содержит центральную трубу с расположенными на ней продольными перегородками, закрытыми наружной обрешеткой, с размещенными в сформированных грузовых камерах по всей длине эластичными емкостями, состоящими из наружной и внутренней оболочек из теплоизолирующего материала, вложенных одна в другую, причем все эластичные емкости с обеих сторон заканчиваются запирающими устройствами с фланцами для подсоединения к заправочному терминалу, при этом на боковых сторонах корпуса танкерного модуля расположены разнесенные по длине корпуса поворотные реверсивные электродвигатели с гребными винтами, а нижняя камера предназначена для размещения топливных элементов, вырабатывающих электроэнергию для питания исполнительных механизмов, в свободном пространстве верхней и нижней грузовых камер располагаются замкнутые балластные камеры с водяными и воздушными насосами.
4. Танкерный модуль п. 3, отличающийся тем, что в секциях нижней и верхней камер танкерного модуля располагаются замкнутые объемы, предназначенные для уравновешивания судна на заданной глубине, реверсивные водяные насосы и баллон со сжатым воздухом для аварийной системы всплытия.
5. Танкерный модуль по п. 3, отличающийся тем, что он дополнительно снабжен холодильными агрегатами для удержания заданной температуры перевозимого продукта.
6. Танкерный модуль по п. 3, отличающийся тем, что в грузовых отсеках танкерного модуля размещены, по меньшей мере, две эластичные емкости, содержащие одинаковые или разных продукты.
7. Танкерный модуль по п. 3, отличающийся тем, что внутренние стенки грузовых отсеков покрыты термоизолирующим материалом.
8. Танкерный модуль по п. 3, отличающийся тем, что балластные емкости разнесены от центра танкерного модуля к его краям.
9. Подводный буксир устройства доставки углеводородов в арктическом бассейне, характеризующийся тем, что атомная энергетическая установка подводного буксира выполнена в виде агрегатируемой установки с системой управления ее работой, при этом подводный буксир оснащен водометным паровым движителем, комбинированной навигационной подсистемой, содержащей: гироинерциальную, спутниковую и астрономическую навигационные подсистемы, а также устройством для вскрытия ледяного покрова и выноса на его поверхность аппаратуры связи со спутниковыми навигационными системами.
| СПОСОБ ТРАНСПОРТИРОВКИ НЕФТЕПРОДУКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2037451C1 |
| ПОДВОДНЫЙ ТРАСПОРТНЫЙ КОМПЛЕКС | 2007 |
|
RU2356779C2 |
| СПОСОБ ПОДВОДНОГО ОСВОЕНИЯ ГАЗОКОНДЕНСАТНЫХ МЕСТОРОЖДЕНИЙ, СПОСОБ ПОДВОДНОГО СЖИЖЕНИЯ ПРИРОДНОГО ГАЗА И ПОДВОДНЫЙ КОМПЛЕКС ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2632598C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ УГЛЕВОДОРОДОВ "CH" ИЗ ДОННЫХ МЕСТОРОЖДЕНИЙ МОРЕЙ И ОКЕАНОВ (ВАРИАНТ РУССКОЙ ЛОГИКИ - ВЕРСИЯ 1) | 2015 |
|
RU2600270C1 |
| Устройство для защиты и регистрации внутренних перенапряжений в электрической сети | 1986 |
|
SU1403191A1 |
| Способ транспортировки углеводородов "CnHm" из донных месторождений морей и океанов (Вариант Русской логики - Версия 2) | 2015 |
|
RU2609550C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОДВОДНОГО АППАРАТА ДЛЯ ТРАНСПОРТИРОВКИ УГЛЕВОДОРОДОВ "CH" ИЗ ДОННЫХ МЕСТОРОЖДЕНИЙ МОРЕЙ И ОКЕАНОВ (ВАРИАНТ РУССКОЙ ЛОГИКИ - ВЕРСИЯ 6) | 2015 |
|
RU2600265C1 |
| US 2005166827 A1, 04.08.2005 | |||
| Многоканальная система сбора данных | 1983 |
|
SU1159028A1 |
| US 2013115002 A1, 09.05.2013 | |||
| US 3975167 A, 17.08.1976. | |||

