Область техники
Группа изобретений относится к области анализа и последующей визуализации данных, а более конкретно к технологиям, направленным на поиск данных об интересующих объектах и на построение на плане контролируемой местности схемы перемещения интересующего объекта по полученным данным.
Уровень техники
Как известно, в настоящее время существует множество систем, способных получать/собирать данные, используемые для дальнейшего анализа для выявления сведений об интересующих объектах.
К таким системам относится, например, система контроля и управления доступом (СКУД). Множество охраняемых предприятий оснащено такими системами. В общем случае СКУД представляет собой совокупность программно-аппаратных технических средств безопасности, имеющих целью ограничение и регистрацию входа-выхода объектов (людей, транспортных средств) на заданной территории через точки прохода. Всякий раз, когда человек прикладывает свой личный идентификатор (карту, пропуск) к считывателю СКУД, данные об этом событии сохраняются в базе данных. По полученным данным можно отследить перемещение объектов по охраняемой территории, а также вычислить время нахождения объекта в том или ином месте.
Все чаще СКУД бывает интегрирована с системами видеонаблюдения, которые в общем случае представляют из себя программно-аппаратное обеспечение или технические средства, использующие методы компьютерного зрения для автоматизированного сбора данных на основании анализа потокового видео.
Системы видеонаблюдения опираются на алгоритмы обработки изображений и распознавания образов, позволяющие анализировать видео без прямого участия человека. Системы видеонаблюдения, в зависимости от конкретных целей, могут реализовывать множество функций, например таких, как: обнаружение объектов, слежение за движением объектов, идентификация объектов, поиск интересующих объектов, и т.д. Системы видеонаблюдения являются более наглядными в сравнении со СКУД.
Бывают ситуации, когда нужно отследить перемещение определенного человека по контролируемой местности за определенный промежуток времени, при этом перемещение фиксируется как различными датчики охранной системы, так и различными камерами видеонаблюдения. С учетом наличия такого объема данных от разных средств слежения оператору охранной системы часто бывает сложно быстро и четко сориентироваться и представить картину перемещения целиком.
Таким образом, основным недостатком предшествующего уровня техники является отсутствие быстрого, точного и наглядного отображения результатов анализа данных, полученных от разных систем слежения за объектом.
Из уровня техники известно решение, раскрытое в заявке US 2011/0103773, Al, H04N 5/93, опубл. 05.05.2011, в которой описаны система и способ поиска объектов, представляющих интерес в захваченном видео, причем способ содержит: захват видео из множества сцен; сохранение видео на множестве элементов хранения; получение запроса на получение суммарного видео для объекта, представляющего интерес, который прошел как минимум по двум сценам из множества сцен; в ответ на запрос, поиск в первом элементе хранения первой части видео, которая содержит объект, представляющий интерес; обработку первой части видео для определения направления движения объекта интереса; выбор второго элемента хранения из множества элементов хранения, в котором можно искать интересующий объект в зависимости от направления движения; поиск во втором элементе хранения второй части видео, которая содержит объект, представляющий интерес; и сшивание первой части видео со второй частью видео для создания суммарного видео.
Основным недостатком данного решения является отсутствие визуального отображения схемы перемещения объекта на плане местности. Кроме того, в данном решении анализируются только видеоданные, без учета данных, получаемых от других датчиков, причем анализ данных и поиск объектов выполняется по нескольким элементам хранения, а не по одному общему архиву.
Наиболее близким по технической сущности является известное решение, раскрытое в патенте US 9208226, В2, G06F 7/00, опубл. 08.12.2015, в котором описано устройство для генерирования видеоматериала, содержащее: блок индексации видеообъектов, сконфигурированный для распознавания объектов путем хранения и анализа видео, полученного от нескольких камер видеонаблюдения; блок поиска видеообъектов, сконфигурированный для сравнения принятых условий поиска с полученными метаданными объекта, а затем для вывода результатов поиска, включая информацию о, по меньшей мере, одном объекте, которая соответствует условиям поиска; блок генерации видеоданных, сконфигурированный для генерации видеодоказательства, путем объединения только видеороликов, содержащих конкретный объект, выбранный из результатов поиска; причем блок генерации видеоданных содержит: блок редактирования видеоматериалов, сконфигурированный для генерации видеодоказательства путем извлечения разделов, включающих конкретный объект, из сохраненных видеороликов, а затем объединения этих разделов; блок генерации видеоданных судебной экспертизы, сконфигурированный для генерации судебных данных о сохраненных видеороликах и созданном видео, а затем для хранения созданного видео доказательства и судебных данных в формате хранения цифровых данных; и блок анализа пути, сконфигурированный для получения пути конкретного объекта между несколькими камерами наблюдения путем анализа корреляций между результатами поиска.
Основным недостатком данного решения является отсутствие возможности совместно анализировать данные, полученные от различных датчиков и устройств, определяющих положение объектов интереса, для дальнейшего построения на плане контролируемой местности точной и информативной схемы перемещения объекта.
Раскрытие сущности изобретения
Заявляемое техническое решение направлено на устранение недостатков, присущих предшествующему уровню техники и на развитие уже известных решений.
Техническим результатом заявленной группы изобретений является обеспечение построения и отображения схемы перемещения объекта на плане местности по данным, полученным от различных датчиков и/или устройств, определяющих конкретное положение объектов в заданные моменты времени.
Данный технический результат достигается за счет того, что система отображения схемы перемещения объектов по контролируемой местности содержит: множество датчиков и/или устройств, определяющих конкретное положение объектов в заданные моменты времени; память, хранящую архив данных, идентифицирующих объекты в определенном местоположении в определенное время, причем упомянутые данные получают от упомянутых датчиков и/или устройств в режиме реального времени; устройство отображения изображений; графический пользовательский интерфейс; устройство ввода/вывода данных; по меньшей мере, одно устройство обработки данных, сконфигурированное для выполнения этапов, включающих:
получение запроса от пользователя через графический пользовательский интерфейс, а также критериев поиска, для выполнения поиска данных о, по меньшей мере, одном объекте; выполнение поиска данных о, по меньшей мере, одном объекте по архиву данных; получение набора данных, характеризующего перемещение, по меньшей мере, одного заданного объекта по контролируемо местности, причем данные были получены от разных датчиков и/или устройств в соответствии с критериями поиска в разное время; автоматическое построение на плане контролируемой местности схемы перемещения объекта по полученному набору данных; отображение упомянутой схемы перемещения объекта на устройстве отображения изображений.
Указанный технический результат также достигается за счет способа отображения схемы перемещения объектов по контролируемой местности, выполняемого компьютерной системой, содержащей, по меньшей мере, устройство обработки данных и память, хранящую архив данных, идентифицирующих объекты в определенном местоположении в определенное время, причем упомянутые данные получены от множества датчиков и/или устройств в режиме реального времени; при этом способ содержит этапы, на которых:
получают запрос от пользователя через графический пользовательский интерфейс, а также критерии поиска, для выполнения поиска данных о, по меньшей мере, одном объекте; выполняют поиск данных о, по меньшей мере, одном объекте по архиву данных; получают набор данных, характеризующий перемещение, по меньшей мере, одного заданного объекта по контролируемо местности, причем данные были получены от разных датчиков и/или устройств в разное время; выполняют автоматическое построение на плане контролируемой местности схемы перемещения объекта по полученному набору данных; отображают упомянутую схему перемещения объекта на устройстве отображения изображений.
В одном частном варианте заявленного решения датчиками и/или устройствами, определяющими конкретное положение объектов в заданные моменты времени, являются по меньшей мере:
- считыватели системы контроля и управления доступом (СКУД);
- радиобраслеты, предоставляющие уникальный идентификатор объекта и его положение;
- считыватели меток радиочастотной идентификации (RFID);
- устройства распознавания номеров транспортных средств;
- устройства распознавания лиц;
- устройства, содержащие средства компьютерного зрения.
В еще одном частном варианте заявленного решения графический пользовательский интерфейс дополнительно сконфигурирован отображать иконку каждого из множества упомянутых датчиков и/или устройств на плане контролируемой местности.
В другом частном варианте заявленного решения система дополнительно содержит множество камер, при этом память дополнительно сконфигурирована хранить архив видеозаписей, получаемых от множества камер в режиме реального времени.
В еще одном частном варианте заявленного решения графический пользовательский интерфейс дополнительно сконфигурирован для указания, какой конкретно упомянутый датчик или устройство находится в области зрения каждой из множества камер.
В другом частном варианте заявленного решения, по меньшей мере, одно устройство обработки данных дополнительно сконфигурировано:
выполнять соотнесение данных, полученных от датчиков и/или устройств, с соответствующими им камерами и интервалами времени;
получать набор интервалов видео, содержащих, по меньшей мере, один заданный объект, причем упомянутые интервалы видео получены от разных камер в разное время;
добавлять полученные интервалы видео к соответствующим датчикам и/или устройствам на схеме перемещения объекта по контролируемой местности.
В еще одном частном варианте заявленного решения, по меньшей мере, одно устройство обработки данных дополнительно сконфигурировано для автоматического обновления схемы перемещения объекта при добавлении новых интервалов видео в набор интервалов видео, в соответствии с полученной новой информацией.
В другом частном варианте заявленного решения графический пользовательский интерфейс дополнительно сконфигурирован для предоставления пользователю системы возможности выбирать, по меньшей мере, один интервал в полученном наборе интервалов видео и удалять его из набора интервалов видео, если выбранный интервал был добавлен в набор интервалов видео по ошибке.
В еще одном частном варианте заявленного решения графический пользовательский интерфейс дополнительно сконфигурирован таким образом, чтобы при клике на схеме перемещения объекта на иконку датчика или устройства автоматически проигрывался интервал видео с соответствующей ему камеры, а при клике на интервал видео выполнялся переход к датчику или устройству, которому соответствует упомянутый интервал видео.
В другом частном варианте заявленного решения графический пользовательский интерфейс дополнительно сконфигурирован отображать перемещение объекта на схеме перемещения объекта стрелками от одного датчика или устройства к другому датчику или устройству.
В еще одном частном варианте заявленного решения длина штриха каждой стрелки прямо пропорциональна скорости перемещения заданного объекта между датчиками и/или устройствами, то есть чем больше скорость, тем короче штрихи стрелки.
В другом частном варианте заявленного решения графический пользовательский интерфейс дополнительно сконфигурирован отображать время перемещения объекта от одного датчика или устройства до другого датчика или устройства на схеме перемещения объекта над упомянутой стрелкой.
В еще одном частном варианте заявленного решения если датчику или устройству на схеме перемещения объекта соответствует интервал времени с соответствующей камеры, то под иконкой упомянутого датчика или устройства отображается длительность полученного интервала видео.
В другом частном варианте заявленного решения планом контролируемой местности является геоинформационная система (ГИС), например открытая карта улиц (OpenStreetMap).
Данный технический результат также достигается за счет считываемого компьютером носителя данных, содержащего исполняемые процессором компьютера инструкции для осуществления вариантов способов отображения схемы перемещения объектов по контролируемой местности.
Краткое описание чертежей
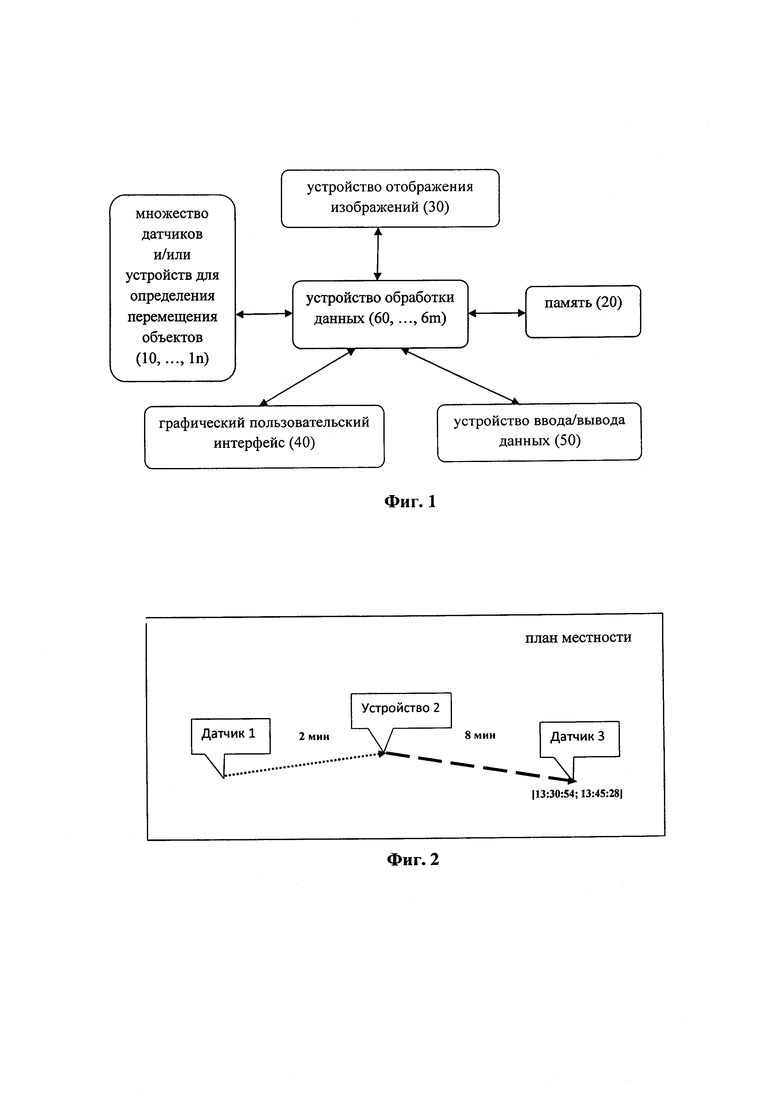
Фиг. 1 - блок-схема системы для отображения схемы перемещения объектов по контролируемой местности.
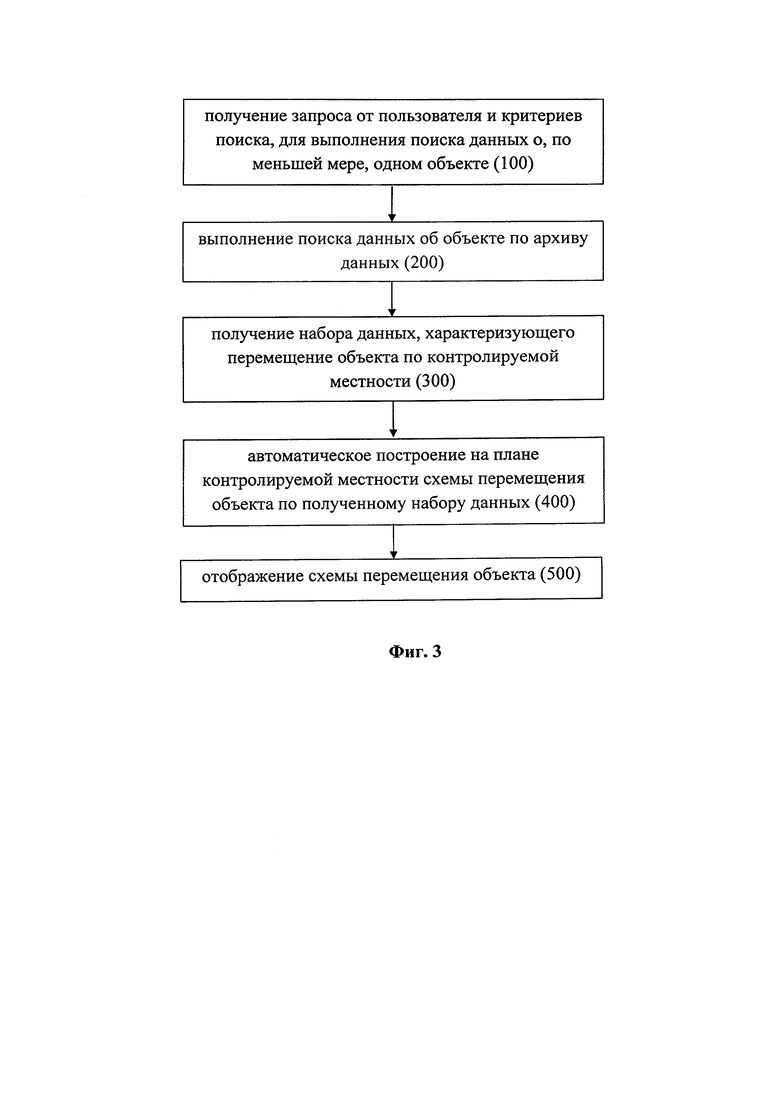
Фиг. 2 - пример отображаемой на плане местности схемы перемещения объекта.
Фиг. 3 - блок-схема одного из вариантов реализации способа отображения схемы перемещения объектов по контролируемой местности.
Осуществление изобретения
Ниже будет приведено описание примерных вариантов осуществления заявленной группы изобретений. Однако заявленная группа изобретений не ограничивается только этими вариантами осуществления. Специалистам в данной области техники будет очевидно, что под объем заявленной группы изобретений, описанной в формуле, могут попадать и другие варианты реализаций.
Заявляемое техническое решение в различных своих вариантах осуществления может быть выполнено в виде компьютерных систем и способов для отображения схемы перемещения объектов по контролируемой местности, а также в виде считываемого компьютером носителя данных.
На фиг. 1 представлена блок-схема одного из вариантов реализации системы для отображения схемы перемещения объектов по контролируемой местности. Компьютерная система включает в себя: множество датчиков и/или устройств, определяющих конкретное положение объектов в заданные моменты времени (10, …, 1n); память (20); устройство отображения изображений (30); графический пользовательский интерфейс (40); устройство ввода/вывода данных (50); и, по меньшей мере, одно устройство обработки данных (60, …, 6m).
В данном контексте под компьютерными системами понимаются любые вычислительные системы, построенные на базе программно-аппаратных средств, например, такие как: персональные компьютеры, смартфоны, ноутбуки, планшеты и т.д.
Датчиками и/или устройствами, определяющими конкретное положение объектов в заданные моменты времени, являются, по меньшей мере: считыватели СКУД; радиобраслеты, предоставляющие уникальный идентификатор объекта и его положение; считыватели RFID меток; устройства распознавания номеров транспортных средств; устройства распознавания лиц; устройства, содержащие средства компьютерного зрения (в том числе видеокамеры).
В качестве устройства обработки данных может выступать процессор, микропроцессор, ЭВМ (электронно-вычислительная машина), ПЛК (программируемый логический контроллер) или интегральная схема, сконфигурированные для исполнения определенных команд (инструкций, программ) по обработке данных. Процессор может быть многоядерным, для параллельной обработки данных.
В роли устройства памяти могут выступать, но, не ограничиваясь, жесткие диски (HDD), флеш-память, ПЗУ (постоянное запоминающее устройство), твердотельные накопители (SSD) и т.д.
Устройством отображения изображений в контексте данной заявки является дисплей/экран.
Графический пользовательский интерфейс (GUI) представляет собой систему средств, для взаимодействия пользователя с вычислительным устройством, основанную на представлении всех доступных пользователю системных объектов и функций в виде графических компонентов экрана (окон, значков, меню, кнопок, списков и т.п.). При этом пользователь имеет произвольный доступ, посредством устройств ввода/вывода данных, ко всем видимым экранным объектам - блокам интерфейса, которые отображаются на дисплее.
Устройство ввода/вывода данных может представлять собой, но не ограничиваться, например, манипулятор мышь, клавиатуру, тачпад, стилус, джойстик, трекпад и т.п.
Следует отметить, что в указанную систему могут входить и любые другие известные в данном уровне техники устройства, например, как будет указано более подробно далее, упомянутая система может содержать множество камер, в область зрения которых попадают датчики и/или устройства, определяющие конкретное положение объектов в заданные моменты времени.
Для дальнейшего понимания сущности заявляемого решения необходимо пояснить, что план местности - это разновидность топографической карты или чертеж небольшого участка местности в заданном масштабе. План контролируемой местности представляет из себя либо изображение (в формате .jpg или .png) либо данные геоинформационной системы (ГИС), например, открытую карту улиц (OpenStreetMap). Все стационарные датчики и/или устройства, определяющие конкретное положение объектов в заданные моменты времени, используемые охранной системой, привязаны к плану местности.
Необходимо пояснить, что память системы хранит архив данных, идентифицирующих объекты в определенном местоположении в определенное время. Упомянутые данные получают от множества различных датчиков и/или устройств, имеющихся в компьютерной системе, в режиме реального времени.
Далее будет описан пример работы вышеупомянутой системы для отображения схемы перемещения объектов по контролируемой местности.
Предположим, что сотруднику полиции необходимо получить все имеющиеся данные из архива данных охранной системы, характеризующие перемещение подозреваемого в ограблении человека. Данные требуются за определенную дату преступления, например, за 12 мая 2016 года. Сотрудник полиции (далее оператор) имеет доступ к заявляемой системе отображения схемы перемещения объектов по контролируемой местности.
Первым делом, оператор системы вводит запрос через графический пользовательский интерфейс на поиск данных о, по меньшей мере, одном конкретном человеке или любом другом требуемом объекте интереса (например, о транспортном средстве). Помимо запроса на поиск, оператор задает конкретные критерии поиска, для повышения точности и скорости упомянутого поиска.
Заявляемое решение подразумевает выполнение поиска любым доступным средством или способом, известным из уровня техники. Например, если у оператора есть фотография интересующего человека, а также номер его карточки СКУД, то поиск может выполняться и лицам и по данным от СКУД. Если есть номер интересующего транспортного средства, то поиск может выполняться по номерам транспортных средств.
Далее, по полученным данным выполняется поиск данных о необходимом объекте в определенный промежуток времени. Поиск, по меньшей мере, одного объекта выполняется по заданным критериям поиска при помощи использования автоматизированных средств поиска. Следует отметить, что на данном этапе поиск может дополнительно выполняться вручную пользователем системы.
Результатом поиска является набор данных, характеризующий перемещение, по меньшей мере, одного заданного объекта по контролируемой местности. Упомянутые данные были получены от разных датчиков и/или устройств, определяющих конкретное положение объектов в заданные моменты времени, в соответствии с критериями поиска в разное время, поскольку интересующий объект перемещался в области нескольких из множества датчиков и/или устройств за требуемый промежуток времени.
Далее система выполняет автоматическое построение на плане контролируемой местности схемы перемещения объекта по полученному набору данных.
В завершении на устройстве отображения изображений выполняется отображение упомянутой схемы перемещения объекта. Для повышения наглядности, графический пользовательский интерфейс дополнительно сконфигурирован отображать иконку каждого из множества упомянутых датчиков и/или устройств на плане контролируемой местности. Иконки могут отображаться либо все одинаково, либо отличаться для каждого конкретного устройства.
В одном из альтернативных вариантов компьютерная система дополнительно к упомянутым датчикам и/или устройствам содержит множество камер. В таком случае графический пользовательский интерфейс дополнительно сконфигурирован для указания, какой конкретно упомянутый датчик или устройство находится в области зрения каждой из множества камер.
Кроме того, память системы сконфигурирована с возможностью хранения архива видеозаписей, получаемых от множества камер в режиме реального времени. В процессе загрузки в память, все видеоданные анализируются, для формирования метаданных, характеризующих данные обо всех объектах в видео. Метаданными в данном случае являются подробные сведения обо всех объектах, перемещающихся в поле зрения каждой камеры (траектории движений, описатели лиц, распознанные номера автомобилей и т.п.). Полученные метаданные также сохраняются в память системы. Впоследствии, полученные метаданные используются для более быстрого поиска, а также для неограниченного количества поисков заданных объектов.
Когда система содержит множество видеокамер, устройства обработки данных дополнительно сконфигурированы, чтобы:
выполнять соотнесение данных, полученных от датчиков и/или устройств, с соответствующими им камерами и интервалами времени;
получать набор интервалов видео, содержащих, по меньшей мере, один заданный объект, причем упомянутые интервалы видео получены от разных камер в разное время; и
добавлять полученные интервалы видео к соответствующим датчикам и/или устройствам на схеме перемещения объекта по контролируемой местности.
Для примера, предположим, что оператор получил набор интервалов видео, состоящий из 3 видеозаписей. Видеозапись с первой камеры длится 1 минуту, видеозапись со второй камеры длится 7 минут и видеозапись с 3 камеры длится 15 минут. Каждый интервал соответствует определенному датчику или устройству.
Следует отметить, что любой системе свойственна некоторая погрешность, которая может привести к дальнейшим более масштабным ошибкам. Для устранения нежелательных ошибок графический пользовательский интерфейс системы сконфигурирован для предоставления пользователю системы возможности выбирать, по меньшей мере, один интервал в полученном наборе интервалов видео и удалять его из набора интервалов видео. Например, выбранный интервал мог быть добавлен в набор интервалов видео по ошибке, которую оператор сразу распознал. После удаления ошибочного интервала устройство обработки данных выполняет автоматическое обновление отображаемой схемы перемещения объекта.
В другом частном варианте заявляемого решения, по меньшей мере, одно из устройств обработки данных дополнительно сконфигурировано для автоматического обновления схемы перемещения объекта при добавлении новых интервалов видео в набор интервалов видео. Например, оператор системы может сам вручную добавить еще один необходимый, по его мнению, интервал видео.
Как другой пример, автоматическое построение схемы перемещения объекта на плане местности может выполняться в реальном времени и параллельно с выполнением поиска, то есть с каждым новым найденным интервалом видеосхема перемещения объекта перестраивается.
Далее рассмотрим более подробно процесс отображения упомянутой схемы перемещения.
Графический пользовательский интерфейс системы сконфигурирован таким образом, чтобы в любой момент времени вне зависимости от выполняемого поиска отображать иконку каждого из множества стационарных датчиков и/или устройств на плане контролируемой местности. Так оператор системы наглядно видит, где именно размещены охранные устройства.
Кроме того, для большей наглядности самого перемещения объекта, графический пользовательский интерфейс дополнительно сконфигурирован отображать перемещение объекта на упомянутой схеме перемещения стрелками от одного датчика или устройства к другому датчику или устройству в соответствии со временем идентификации объекта каждым из упомянутых датчиков и/или устройств. Пример отображения такого перемещения показан на фиг. 2, на которой видно, что объект интереса перемещался от первого датчика (например, считывателя СКУД) ко второму устройству (например, устройству распознавания лиц), а потом от второго устройства к третьему датчику (например, другому считывателю СКУД, расположенному в другом местоположении относительно первого считывателя).
При этом длина штриха каждой стрелки прямо пропорциональна скорости перемещения заданного объекта между датчиками и/или устройствами, то есть чем больше скорость, тем короче штрихи стрелки.
Кроме того, графический пользовательский интерфейс дополнительно сконфигурирован отображать время перемещения объекта от одного датчика или устройства до другого датчика или устройства на схеме перемещения объекта над упомянутой стрелкой. Как показано на фиг. 2, от первого датчика до второго устройства объект переместился за 2 минуты, а от второго устройства до третьего датчика - за 8 минут. С учетом того, что в масштабе плана местности расстояние между первым датчиком и вторым устройством и вторым устройством, и третьим датчиком соответственно практически одинаковое, и учитывая время перемещения между ними, штрихи первой стрелки гораздо короче штрихов на второй стрелке из-за разной скорости перемещения.
Если датчику или устройству на схеме перемещения объекта соответствует интервал времени с соответствующей ему камеры, то под иконкой упомянутого датчика или устройства отображается длительность полученного соответствующего интервала видео. Например, как указано на фиг. 2, под иконкой третьего датчика отображается конкретный промежуток времени, например, [13:30:54; 13:45:28], что говорит о том, что данному датчику соответствует 15 минутный интервал времени, на котором обнаружен объект интереса.
Дополнительно, для обеспечения большего взаимодействия и улучшенной управляемости системы, графический пользовательский интерфейс дополнительно сконфигурирован таким образом, чтобы при клике на схеме перемещения объекта на иконку датчика или устройства автоматически проигрывался интервал видео с соответствующей ему камеры (если такой интервал есть и добавлен к схеме перемещения на более ранних этапах), а при клике на интервал видео выполнялся переход к датчику или устройству, которому соответствует упомянутый интервал видео.
На фиг. 3 представлена блок-схема одного из вариантов реализации способа отображения схемы перемещения объектов по контролируемой местности. Указанный способ выполняется компьютерной системой, содержащей, по меньшей мере, устройство обработки данных и память, хранящую архив данных, идентифицирующих объекты в определенном местоположении в определенное время, причем упомянутые данные получены от множества датчиков и/или устройств в режиме реального времени. При этом способ содержит этапы, на которых:
(100) получают запрос от пользователя через графический пользовательский интерфейс, а также критерии поиска, для выполнения поиска данных о, по меньшей мере, одном объекте;
(200) выполняют поиск данных о, по меньшей мере, одном объекте по архиву данных;
(300) получают набор данных, характеризующий перемещение, по меньшей мере, одного заданного объекта по контролируемо местности, причем данные были получены от разных датчиков и/или устройств в разное время;
(400) выполняют автоматическое построение на плане контролируемой местности схемы перемещения объекта по полученному набору данных;
(500) отображают упомянутую схему перемещения объекта на устройстве отображения изображений.
Следует еще раз отметить, что данный способ реализуется средствами описанной ранее системы для отображения схемы перемещения объектов по контролируемой местности и, следовательно, может быть расширен и уточнен всеми теми же частными вариантами исполнения, которые уже были описаны выше для реализации системы для отображения схемы перемещения объектов по контролируемой местности.
Кроме того, варианты осуществления настоящей группы изобретений могут быть реализованы с использованием программного обеспечения, аппаратных средств, программной логики или их комбинации. В данном примере осуществления программная логика, программное обеспечение или набор инструкций хранятся на одном или более из различных традиционных считываемых компьютером носителе данных.
В контексте данного описания «считываемым компьютером носителем данных» может быть любая среда или средство, которые могут содержать, хранить, передавать, распространять или транспортировать инструкции (команды) для их использования (исполнения) вычислительным устройством, например, таким как компьютер. При этом носитель данных может являться энергозависимым или энергонезависимым машиночитаемым носителем данных.
При необходимости, по меньшей мере, часть различных операций, рассмотренных в описании данного решения, может быть выполнена в отличном от представленного порядке и/или одновременно друг с другом.
Хотя данное техническое решение было описано подробно в целях иллюстрации наиболее необходимых в настоящее время и предпочтительных вариантов осуществления, следует понимать, что данное изобретение не ограничивается раскрытыми вариантами осуществления и более того, предназначено для модификации и различных других комбинаций признаков из описанных вариантов осуществления. Например, следует понимать, что настоящее изобретение предполагает, что в возможной степени, один или более признаков любого варианта осуществления могут быть объединены с другим одним или более признаками любого другого варианта осуществления.
Группа изобретений относится к области анализа и последующей визуализации данных, а более конкретно к технологиям, направленным на поиск данных об интересующих объектах и на построение на плане контролируемой местности схемы перемещения интересующего объекта по полученным данным. Технический результат заключается в обеспечении системы для построения и отображения схемы перемещения объекта на плане местности. Система содержит датчики и/или устройства, определяющие конкретное положение объектов в заданные моменты времени, память, хранящую архив данных, идентифицирующих объекты в определенном местоположении в определенное время, устройство отображения изображений, графический пользовательский интерфейс, устройство ввода/вывода данных и устройство обработки данных. Реализуемый системой способ отображения схемы перемещения объектов по контролируемой местности содержит этапы, на которых получают запрос от пользователя через графический пользовательский интерфейс, выполняют поиск данных о объекте по архиву данных, получают набор данных, характеризующий перемещение заданного объекта по контролируемой местности, выполняют автоматическое построение на плане контролируемой местности схемы перемещения объекта, отображают схему перемещения объекта. 3 н. и 26 з.п. ф-лы, 3 ил.
1. Система отображения схемы перемещения объектов по контролируемой местности, содержащая:
множество датчиков и/или устройств, определяющих конкретное положение объектов в заданные моменты времени;
память, хранящую архив данных, идентифицирующих объекты в определенном местоположении в определенное время, причем упомянутые данные получают от упомянутых датчиков и/или устройств в режиме реального времени;
устройство отображения изображений;
графический пользовательский интерфейс;
устройство ввода/вывода данных;
по меньшей мере, одно устройство обработки данных, сконфигурированное для выполнения этапов, включающих:
получение запроса от пользователя через графический пользовательский интерфейс, а также критериев поиска, для выполнения поиска данных о, по меньшей мере, одном объекте;
выполнение поиска данных о, по меньшей мере, одном объекте по архиву данных;
получение набора данных, характеризующего перемещение, по меньшей мере, одного заданного объекта по контролируемой местности, причем данные были получены от разных датчиков и/или устройств в соответствии с критериями поиска в разное время;
автоматическое построение на плане контролируемой местности схемы перемещения объекта по полученному набору данных;
отображение упомянутой схемы перемещения объекта на устройстве отображения изображений.
2. Система по п. 1, в которой датчиками и/или устройствами, определяющими конкретное положение объектов в заданные моменты времени, являются по меньшей мере:
- считыватели системы контроля и управления доступом (СКУД);
- радиобраслеты, предоставляющие уникальный идентификатор объекта и его положение;
- считыватели меток радиочастотной идентификации (RFID);
- устройства распознавания номеров транспортных средств;
- устройства распознавания лиц;
- устройства, содержащие средства компьютерного зрения.
3. Система по п. 2, в которой графический пользовательский интерфейс дополнительно сконфигурирован отображать иконку каждого из множества упомянутых датчиков и/или устройств на плане контролируемой местности.
4. Система по любому из пп. 2, 3, дополнительно содержащая множество камер, при этом память дополнительно сконфигурирована хранить архив видеозаписей, получаемых от множества камер в режиме реального времени.
5. Система по п. 4, в которой графический пользовательский интерфейс дополнительно сконфигурирован для указания, какой конкретно упомянутый датчик или устройство находится в области зрения каждой из множества камер.
6. Система по п. 5, в которой, по меньшей мере, одно устройство обработки данных дополнительно сконфигурировано:
выполнять соотнесение данных, полученных от датчиков и/или устройств, с соответствующими им камерами и интервалами времени;
получать набор интервалов видео, содержащих, по меньшей мере, один заданный объект, причем упомянутые интервалы видео получены от разных камер в разное время;
добавлять полученные интервалы видео к соответствующим датчикам и/или устройствам на схеме перемещения объекта по контролируемой местности.
7. Система по п. 6, в которой, по меньшей мере, одно устройство обработки данных дополнительно сконфигурировано для автоматического обновления схемы перемещения объекта при добавлении новых интервалов видео в набор интервалов видео, в соответствии с полученной новой информацией.
8. Система по любому из пп. 6, 7, в которой графический пользовательский интерфейс дополнительно сконфигурирован для предоставления пользователю системы возможности выбирать, по меньшей мере, один интервал в полученном наборе интервалов видео и удалять его из набора интервалов видео, если выбранный интервал был добавлен в набор интервалов видео по ошибке.
9. Система по п. 6, в которой графический пользовательский интерфейс дополнительно сконфигурирован таким образом, чтобы при клике на схеме перемещения объекта на иконку датчика или устройства автоматически проигрывался интервал видео с соответствующей ему камеры, а при клике на интервал видео выполнялся переход к датчику или устройству, которому соответствует упомянутый интервал видео.
10. Система по п. 6, в которой графический пользовательский интерфейс дополнительно сконфигурирован отображать перемещение объекта на схеме перемещения объекта стрелками от одного датчика или устройства к другому датчику или устройству.
11. Система по п. 10, в которой длина штриха каждой стрелки прямо пропорциональна скорости перемещения заданного объекта между датчиками и/или устройствами, то есть чем больше скорость, тем короче штрихи стрелки.
12. Система по любому из пп. 10, 11, в которой графический пользовательский интерфейс дополнительно сконфигурирован отображать время перемещения объекта от одного датчика или устройства до другого датчика или устройства на схеме перемещения объекта над упомянутой стрелкой.
13. Система по п. 12, в которой если датчику или устройству на схеме перемещения объекта соответствует интервал времени с соответствующей камеры, то под иконкой упомянутого датчика или устройства отображается длительность полученного интервала видео.
14. Система по п. 1, в которой планом контролируемой местности является геоинформационная система (ГИС), например, открытая карта улиц (OpenStreetMap).
15. Способ отображения схемы перемещения объектов по контролируемой местности, выполняемый компьютерной системой, содержащей, по меньшей мере, устройство обработки данных и память, хранящую архив данных, идентифицирующих объекты в определенном местоположении в определенное время, причем упомянутые данные получены от множества датчиков и/или устройств в режиме реального времени; при этом способ содержит этапы, на которых:
получают запрос от пользователя через графический пользовательский интерфейс, а также критерии поиска, для выполнения поиска данных о, по меньшей мере, одном объекте;
выполняют поиск данных о, по меньшей мере, одном объекте по архиву данных;
получают набор данных, характеризующий перемещение, по меньшей мере, одного заданного объекта по контролируемо местности, причем данные были получены от разных датчиков и/или устройств в разное время;
выполняют автоматическое построение на плане контролируемой местности схемы перемещения объекта по полученному набору данных;
отображают упомянутую схему перемещения объекта на устройстве отображения изображений.
16. Способ по п. 15, в котором датчиками и/или устройствами являются по меньшей мере:
- считыватели СКУД;
- радиобраслеты, предоставляющие уникальный идентификатор объекта и его положение;
- считыватели RFID меток;
- устройства распознавания номеров транспортных средств;
- устройства распознавания лиц;
- устройства, содержащие средства компьютерного зрения.
17. Способ по п. 16, дополнительно выполненный с возможностью отображать иконку каждого из множества упомянутых датчиков и/или устройств на плане контролируемой местности.
18. Способ по любому из пп. 16, 17, в котором память дополнительно сконфигурирована хранить архив видеозаписей, получаемых от множества камер в режиме реального времени, в том случае, если компьютерная система дополнительно содержит множество камер.
19. Способ по п. 18, дополнительно выполненный с возможностью указания, какой конкретно упомянутый датчик или устройство находится в области зрения каждой из множества камер.
20. Способ по п. 19, дополнительно выполненный с возможностью:
выполнять соотнесение данных, полученных от датчиков и/или устройств, с соответствующими им камерами и интервалами времени;
получать набор интервалов видео, содержащих, по меньшей мере, один заданный объект, причем упомянутые интервалы видео получены от разных камер в разное время;
добавлять полученные интервалы видео к соответствующим датчикам и/или устройствам на схеме перемещения объекта по контролируемой местности.
21. Способ по п. 20, дополнительно выполненный с возможностью автоматического обновления схемы перемещения объекта при добавлении новых интервалов видео в набор интервалов видео, в соответствии с полученной новой информацией.
22. Способ по любому из пп. 20, 21, дополнительно выполненный с возможностью предоставления пользователю системы возможности выбирать, по меньшей мере, один интервал в полученном наборе интервалов видео и удалять его из набора интервалов видео, если выбранный интервал был добавлен в набор интервалов видео по ошибке.
23. Способ по п. 20, дополнительно выполненный таким образом, чтобы при клике на схеме перемещения объекта на иконку датчика или устройства автоматически проигрывался интервал видео с соответствующей ему камеры, а при клике на интервал видео выполнялся переход к датчику или устройству, которому соответствует упомянутый интервал видео.
24. Способ по п. 20, в котором перемещение объекта на схеме перемещения объекта отображается стрелками от одного датчика или устройства к другому датчику или устройству.
25. Способ по п. 24, в котором длина штриха каждой стрелки прямо пропорциональна скорости перемещения заданного объекта между датчиками и/или устройствами, то есть чем больше скорость, тем короче штрихи стрелки.
26. Способ по любому из пп. 24, 25, в котором дополнительно отображается время перемещения объекта от одного датчика или устройства до другого датчика или устройства на схеме перемещения объекта над упомянутой стрелкой.
27. Способ по п. 26, в котором если датчику или устройству на схеме перемещения объекта соответствует интервал времени с соответствующей камеры, то под иконкой упомянутого датчика или устройства отображается длительность полученного интервала видео.
28. Способ по п. 15, в котором планом контролируемой местности является геоинформационная система (ГИС), например открытая карта улиц (OpenStreetMap).
29. Считываемый компьютером носитель данных, содержащий исполняемые процессором компьютера инструкции для осуществления способов отображения схемы перемещения объектов по контролируемой местности по любому из пп. 16-28.
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ УЧАСТНИКОВ ДОРОЖНОГО ДВИЖЕНИЯ | 2015 |
|
RU2598362C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ВИДЕОАУТЕНТИФИКАЦИИ ПОЛЬЗОВАТЕЛЯ | 2010 |
|
RU2504004C2 |
| СИСТЕМА КОНТРОЛЯ ПРОХОДА И ПЕРЕМЕЩЕНИЯ В ТОННЕЛЕ | 2015 |
|
RU2606554C2 |
| СПОСОБ РАНЖИРОВАНИЯ ВИДЕОДАННЫХ | 2012 |
|
RU2484529C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ПОМОЩИ В ОПРЕДЕЛЕНИИ МЕСТОПОЛОЖЕНИЯ И ВЫБОРЕ ЖЕЛАЕМОГО ПРЕДМЕТА В МЕСТЕ ХРАНЕНИЯ | 2012 |
|
RU2636102C2 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| US 9197861 B2, 24.11.2015 | |||
| US 9208226 B2, 08.12.2015. | |||

