Изобретение относится к сельскому хозяйству, в частности к устройствам для мониторинга сельскохозяйственных и лесных угодий, внесения средств защиты растений, удобрений и других агрохимикатов летательными аппаратами в системе точного земледелия.
Известна аэростатная система для внесения жидких и твердых веществ на поверхность почвы, содержащая аэростат с оболочкой мягкого типа сигарообразной формы, несущий блок с силовой установкой, электромеханическим, пневматическим и осветительным оборудованием, блок для внесения жидких и твердых веществ в виде пневматических штанговых устройств, блок дистанционного управления полетом аэростата и внесением веществ на обрабатываемую поверхность (патент RU 2186003, МПК B64D 1/18, А01М 11/00, 2002).
Недостатком известного устройства является то, что твердые и жидкие вещества, в частности, удобрения и средства защиты растений вносятся по усредненным показателям для всего сельскохозяйственного поля, без учета внутрипольной неоднородности почвенного плодородия и фитосанитарного состояния посевов сельскохозяйственных культур, в связи с чем, удобрения зачастую вносятся на участках поля со значительными отклонениями от установленной дозы как в большую, так и в меньшую сторону, а средствами защиты растений могут обрабатываться участки, не засоренные сорными растениями, не имеющие вредителей и болезней, что приводит, с одной стороны, к излишнему перерасходу удобрений, пестицидов и, как следствие, загрязнению окружающей среды, а с другой стороны, к недобору урожая сельскохозяйственных культур. Большая трудоемкость монтажа и демонтажа конструкций основных блоков аэростатной системы при подготовке к полету и после завершения полета, ограничение по полезной нагрузке, недостаточная рабочая ширина захвата при внесении удобрений и пестицидов, отсутствие аэродромной площадки для автономных летательных аппаратов, низкая устойчивость от воздействия внешних факторов при полете в воздушной среде снижают функциональные возможности данного устройства.
Известен дирижабль с подвижным крылом (патент RU 2481235, МПК В64В 1/20, 2013) для наблюдения за местностью, содержащий аэростат с килем, прикрепленный лентами к раме, являющейся основой дирижабля, при этом на раме установлены двигатели, стабилизатор, выдвижное крыло с механизмом перемещения крыла по рельсам в направлении, перпендикулярном оси симметрии дирижабля и поворота стабилизатора, система автоматического управления полетом дирижабля.
Известный летательный аппарат обладает улучшенными летно-техническими характеристиками полета и удобством в эксплуатации. Недостатком данного устройства является ограниченная область его использования в сельскохозяйственном производстве, в частности, отсутствие устройств, обеспечивающих, кроме мониторинга местности, обработку сельскохозяйственных угодий средствами защиты растений и внесение удобрений.
Известен воздухоплавательный аппарат, содержащий два дирижабля в виде остовов с оболочками, соединенными между собой дугообразной консолью, верхней и нижней площадками, имеющими общую переднюю и заднюю обтекаемые стенки с образованием технической полости, сообщаемой с полостями дирижаблей, с дополнительными баллонетами и четырьмя роторами; прикрепленные к остовам баллонеты с газом легче воздуха, стабилизаторы, силовую установку с движителями, причальное приспособление, кабину управления, пассажирский и грузовой отсеки, расположенные на оболочках панели солнечных батарей, причем верхняя площадка выполняет роль аэродрома с взлетно-посадочной полосой для самолетов и участком взлета - посадки для вертолетов (патент RU 2387574, МПК В64В 1/06, 2010).
Известный воздухоплавательный аппарат, включающий аэродромную площадку с автономными летательными аппаратами в виде самолетов и вертолетов, при оснащении последних фотосъемочной аппаратурой и оборудованием для внесения пестицидов и удобрений, может применяться для мониторинга и обработки сельскохозяйственных и лесных угодий.
Недостатками известного воздухоплавательного аппарата являются:
- отсутствие системы управления полетом по заданной траектории в автоматическом режиме в соответствии с полетным заданием;
- отсутствие устройств, обеспечивающих мониторинг сельскохозяйственных угодий и обработку полученной информации, автоматизированную подачу, дозирование и распределения удобрений и средств защиты растений в процессе полета в соответствии с электронной картой сельскохозяйственного поля, что не позволяет осуществлять дифференцированную обработку посевов пестицидами и программированное внесение удобрений в системе точного земледелия;
- соединение остовов дирижаблей технической полостью с двумя горизонтальными площадками приводит к повышенному центру тяжести воздухоплавательного аппарата и, как следствие, снижению его управляемости и устойчивости полета особенно в условиях повышенной турбулентности воздушных масс, что, в свою очередь, сказывается на надежности и безопасности полета;
- соединение остовов дирижаблей жесткой дугообразной консолью выше верхней горизонтальной площадки не обеспечивает достаточную жесткость конструкции, а применение дополнительных дугообразных консолей затрудняет взлет и посадку автономных летательных аппаратов с взлетно-посадочной полосы и участков взлета-посадки вертолетов;
- наличие на борту экипажа для управления как воздухоплавательным аппаратом, так и для координации взлета и посадки автономных летательных аппаратов требует соответственно системы безопасности, жизнеобеспечения и повышает затраты на выполнение полетного задания.
Известны бортовые системы управления полетом роботизированных воздухоплавательных комплексов на базе дирижаблей, включающие бортовую систему управления носителем на базе процессора, комплексированного с инерциальной навигационной и глобальной ГЛОНАСС/GPS системами, систему управления бортовым оборудованием, исполнительные механизмы, встроенные модули бортового оборудования, систему электропитания (Пшихопов В.X., Медведев М.Ю., Сиротенко М.Ю. и др. Проектирование систем управления роботизированных воздухоплавательных комплексов на базе дирижаблей // Известия ТРТУ, - 2006, - №3(58)). Данная система не обеспечивает управление группой беспилотных летательных аппаратов (БЛА). Из известных способов и устройств управления БЛА (Иванова И.А., Никонов В.В., Царева А.А. Способы организации управления беспилотными летательными аппаратами // Актуальные проблемы гуманитарных и естественных наук. - 2014. - Выпуск №11-1) наиболее эффективной для группы объектов является система согласованного распределенного контроля, связи и управления группой из нескольких БЛА (Боб Мак-Ильврайд. Распределенное управление беспилотными летательными аппаратами // Современные технологи автоматизации. - 2009. - №3).
Система точного земледелия в аспекте применения удобрений и пестицидов, осуществляемая в режимах «Off-lien» или «On-lien», предусматривает следующие основные этапы: мониторинг и оценку вариабельности минерального питания растений, фитосанитарного состояния агроценозов, построение цифровых карт-заданий, отображающих локальные участки сельскохозяйственного поля, требующих обработки пестицидами или участки поля для дифференцированного внесения минеральных удобрений и других агрохимикатов на каждом выделенном элементарном участке сельскохозяйственного поля, дифференцированное внесение пестицидов и удобрений (Д. Шпаар, А. Захаренко, В. Якушев и др. Точное сельское хозяйство (PRECISION AGRICULTURE). - Санкт-Петербург - Пушкин. - 2009. - С. 14-16, 108, 188-203).
Технология дифференцированного внесения средств защиты растений и удобрений не предусматривает систему управления группой мобильных объектов. В то же время система согласованного распределенного управления группой летательных аппаратов не включает процессы дифференцированного внесения жидких средств химизации.
Выявленные недостатки известных устройств не позволяют осуществлять дифференцированное внесение пестицидов и удобрений в системе точного земледелия авиационным способом с помощью известных воздухоплавательных летательных аппаратов, что ограничивает технологические возможности воздухоплавательных аппаратов, снижает эффективность и качество их применения в сельском хозяйстве.
Технической задачей изобретения является повышение надежности и безопасности полета, повышение производительности, эффективности и качества внесения средств защиты растений и удобрений, уменьшение рисков загрязнения окружающей среды путем создания воздухоплавательного роботизированного аппарата для мониторинга сельскохозяйственных угодий и дифференцированного внесения средств защиты растений и удобрений в точном земледелии на каждом выделенном элементарном участке поля и по всей обрабатываемой площади в соответствии с электронной картой - заданием, отображающим дозы внесения минеральных удобрений в соответствии с агрохимической картограммой поля или нормы внесения пестицидов в соответствии с картой фитосанитарного состояния агроценозов.
Поставленная техническая задача достигается тем, что воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений и удобрений в точном земледелии содержит два жестких дирижабля в виде остовов с оболочками, образующими полости с внутренними носовыми и кормовыми отсеками с балластными емкостями, средними отсеками, заполненными газом легче воздуха, стабилизаторы, рули направления и высоты, крыло с выдвижными концами, силовые установки с двигателями, панели солнечных батарей, блок электропитания с аккумуляторными батареями, соединяющую остовы жесткую плоско-выпуклую пространственную оболочку с носовыми и кормовыми техническими полостями, взлетно-посадочную платформу с взлетно-посадочными площадками для беспилотных летательных аппаратов, автономные беспилотные летательные аппараты с вертикальным взлетом и посадкой, снабженные пилотажно-навигационным оборудованием, устройствами получения видовой информации и диспергирования рабочих растворов, автоматизированную бортовую систему управления, блок системы управления бортовым оборудованием, блок автоматического управления исполнительными механизмами, блок управления цифровой оптической системой, блок автоматизированной системы управления внесением средств защиты растений и удобрений, блок цифровых оптических систем, модули диспергирования удобрений и средств защиты растений согласно изобретению, технологический модуль в виде жесткой плоско-выпуклой пространственной оболочки выполнен в форме половины тела эллипсоида вращения, вытянутого вдоль большой оси, являющейся одновременно осью симметрии воздухоплавательного роботизированного аппарата, параллельной продольным осям симметрии дирижаблей и малой осью, совпадающей с осью симметрии воздухоплавательного роботизированного аппарата, перпендикулярной продольным осям симметрии дирижаблей, причем продольные и поперечные оси симметрии дирижаблей, большая и малая ось соединительной пространственной оболочки лежат в одной плоскости, а мобильная воздушная взлетно-посадочная платформа разделена на элементарные взлетно-посадочные площадки в форме квадратов, каждая из сторон которых, по крайней мере, больше на половину диаметра окружности описываемой габаритные размеры каждого беспилотного летательного аппарата, при этом каждая взлетно-посадочная площадка оборудована быстродействующими автоматическими устройствами стыковки - расстыковки для подзарядки аккумуляторных батарей и дополнительно для беспилотных летательных аппаратов для внесения удобрений и средств защиты растений оборудована автоматическим устройством заправки, во внутренней части соединительной пространственной оболочки размещено, по крайней мере, пять гидравлических резервуаров, отделенных плоскими сегментными перегородками, имеющие двухсторонние торцовые поверхности, сопряженные с боковыми поверхностями оболочек дирижаблей, и совокупное днище, являющееся частью поверхности вытянутого эллипсоида вращения, хвостовая часть технической полости снабжена заправочными горловинами, каждая из которых соединена гидролиниями с соответствующим гидравлическим резервуаром, при этом в резервуарах для средств защиты растений и удобрений установлены электрогидравлические насосы - дозаторы, соединенные на выходе с быстродействующими заправочными устройствами стыковки-расстыковки и на входе гидролиниями с фильтрами гидравлических резервуаров, к каждому из которых в свою очередь подсоединен отдельный модуль подачи и дозирования блока автоматизированной системы управления распределением, дозированием и внесением средств защиты растений и удобрений, интегрированного в систему управления воздухоплавательного роботизированного аппарата; каждый модуль подачи и дозирования соединен гидролиниями с отдельной гидравлической коммуникацией, к каждой из которых подключены модули диспергирования, при этом модули диспергирования, установлены в нижней части крыла с определенным шагом и включают распределительные коллекторы с электрогидравлическими форсунками не менее четырех типоразмеров с увеличением площади выходного отверстия сопла последующей форсунки не менее, чем на одну четвертую часть. Изобретение поясняется чертежами.
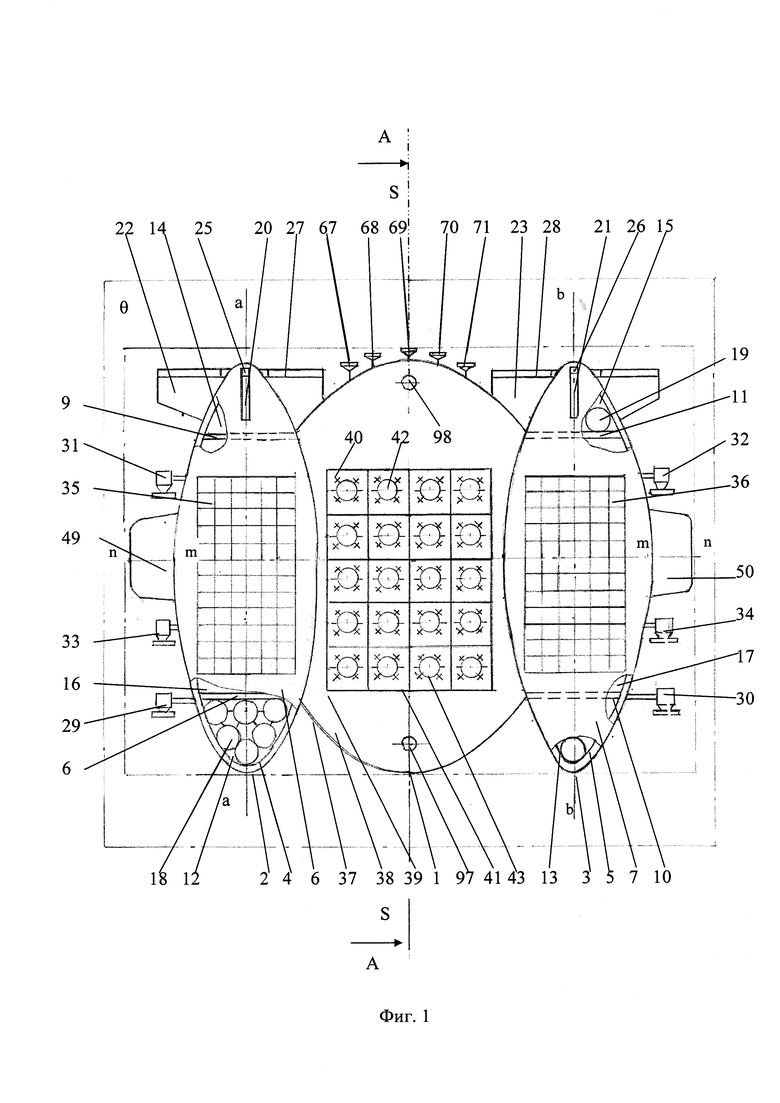
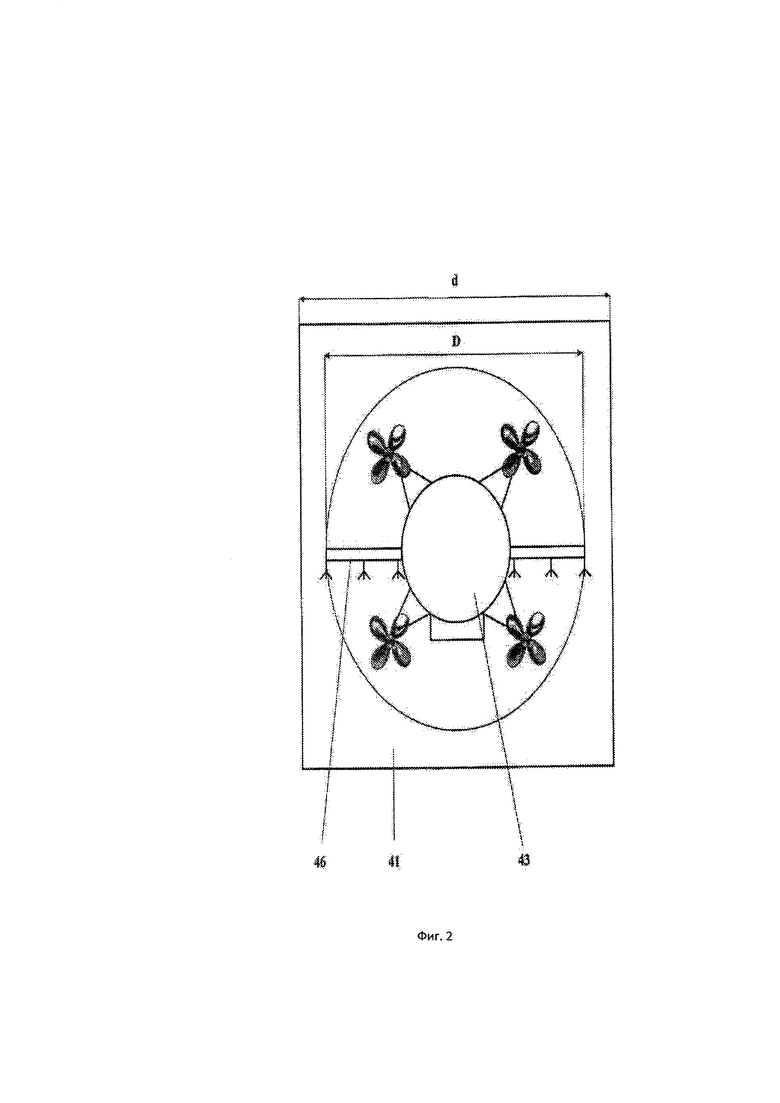
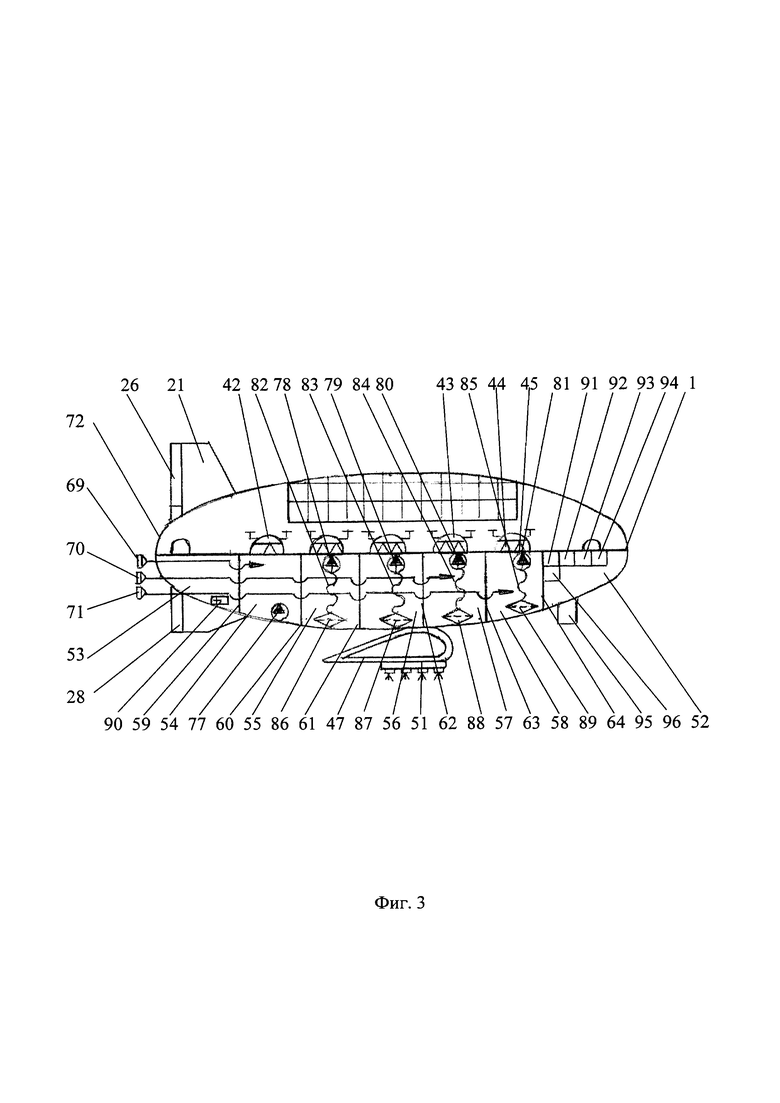
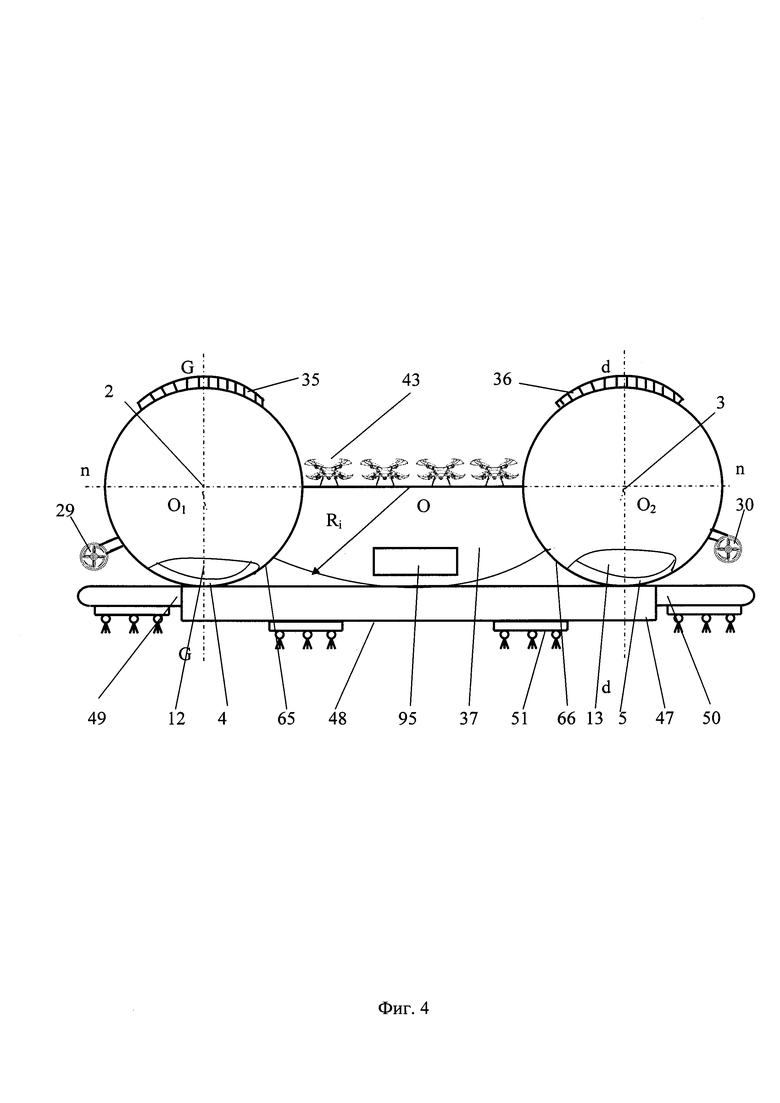
На фиг. 1 изображен воздухоплавательный роботизированного аппарата, вид сверху; на фиг. 2 изображена элементарная взлетно-посадочная площадка для беспилотного летательного аппарата; на фиг. 3 изображен воздухоплавательный роботизированный аппарат, разрез А-А на фиг. 1; на фиг. 4 изображен воздухоплавательный роботизированный аппарат, вид, спереди на фиг. 1; на фиг. 5 изображена функциональная схема автоматизированной бортовой системы управления воздухоплавательным роботизированным аппаратом; на фиг. 6 изображена блок - схема автоматического управления расходом, распределением и подачей рабочих растворов пестицидов и удобрений к модулям электрогидравлических форсунок; на фиг. 7 изображена схема обработки сельскохозяйственного поля пестицидами и удобрениями.
Воздухоплавательный роботизированный аппарат 1 для мониторинга и внесения средств защиты растений и удобрений в точном земледелии содержит два жестких дирижабля 2 и 3 обтекаемой формы с параллельными продольными осями а-а, b-b, параллельными вертикальными осями с-с, d-d и общей поперечной осью n-n. Каждый из дирижаблей 2 и 3 имеет остовы 4 и 5, обтянутые оболочками 6 и 7, образующими полости с внутренними отсеками, разделенными газонепроницаемыми перегородками 8, 9, 10 и 11 на носовые 12 и 13, кормовые 14 и 15 и средние 16 и 17 отсеки. Отсеки 16 и 17 заполнены несущим газом легче воздуха, например, гелием. Носовые 12, 13 и кормовые 14, 15 отсеки снабжены балластными емкостями 18, 19, заполненными воздухом под давлением, жестко связанными между собой, прикрепленными к стрингерам остовов 4, 5 и перегородкам 8, 9, 10, 11 и соединенные с системой нагнетания и сброса воздуха, которая соединяет также между собой балластные емкости носовых и кормовых отсеков (на фиг. не показано).
Дирижабли 2 и 3 оснащены дельтаобразными стабилизаторами верхними 20, 21 и боковыми 22, 23, с рулями направления 25, 26 и высоты 27, 28, силовыми установками с передними 29, 30, задними 31, 32 двигателями с переменным вектором тяги и маршевыми двигателями 33, 34 с воздушными винтами в защитном кольцевом кожухе. Сверху оболочек 6, 7 дирижаблей 2 и 3 размещены панели солнечных батарей 35, 36.
Обращенные друг к другу остовы 4, 5 дирижаблей 2, 3 соединены между собой технологическим модулем в виде жесткой плоско-выпуклой пространственной оболочки 37, выполненной в форме половины тела эллипсоида вращения, вытянутого вдоль большой оси s-s, являющейся одновременно осью симметрии воздухоплавательного роботизированного аппарата 1, параллельной продольным осям симметрии а-а и b-b дирижаблей 2 и 3 и малой осью m-m, совпадающей с общей поперечной осью n-n воздухоплавательного роботизированного аппарата 1, перпендикулярной продольным осям симметрии а-а и b-b дирижаблей 2, 3; при этом оси а-а, b-b, n-n и оси s-s и m-m соединительной пространственной оболочки 37 лежат в одной плоскости О, проходящей через продольные оси симметрии а-а и b-b дирижаблей 2 и 3.
На верхней плоской части 38 жесткой пространственной оболочки 37 размещена мобильная воздушная взлетно-посадочная платформа 39, разделенная на элементарные взлетно-посадочные площадки 40 и 41 в форме квадратов. На взлетно-посадочных площадках 40 установлены БЛА с вертикальным взлетом и посадкой для дистанционного зондирования 42 сельскохозяйственных угодий. На взлетно-посадочных площадках 41 установлены БЛА 43 для внесения удобрений и средств защиты растений. Каждая из сторон d квадрата взлетно-посадочных площадок 40 и 41, по крайней мере, больше на половину диаметра окружности D описывающей габаритные размеры каждого БЛА 42 и 43. Такое соотношение габаритов БЛА 42 и 43 и размеров взлетно-посадочных площадок 40, 41 предопрелеит безаварийность взлета и посадки БЛА 42 и 43.
Каждая взлетно-посадочная площадка 40, 41 оборудована быстродействующими автоматическими устройствами стыковки-расстыковки 44 для подзарядки аккумуляторных батарей БЛА 42 и 43 и автоматическим устройством 45 для заправки БЛА 43. Каждый из автономных БЛА 42 и 43 оснащен пилотажно-навигационным оборудованием, включающим модуль малогабаритной интегральной навигационной системы, бортовой компьютер с программным обеспечением для управления полетом, взаимодействия, связи с другими автономными БЛА и с воздухоплавательным роботизированным аппаратом 1, наборы датчиков и контроллеры для управления исполнительными механизмами (не показано).
БЛА для дистанционного зондирования 42 оборудованы блоком устройств получения видовой информации в виде автоматических гиростабилизированных цифровых, фото-теле-тепловизионных и мультиспектральных камер, работающих в оптическом (видимом), тепловом диапазонах электромагнитных волн, приемопередающей аппаратурой (не показано).
БЛА 43 оснащены гидробаками, блоком дозирования и диспергирования средств защиты растений и удобрений (не показано), устройством диспергирования рабочих растворов в виде штангового рабочего органа с распылителями 46.
Воздухоплавательный роботизированный аппарат 1 снабжен крылом 47, в виде тонкостенной оболочки, состоящей из обшивки с внутренними элементами усиления в виде стрингеров и нервюр (не показано). Крыло 47 состоит из центральной неподвижной части 48 и выдвижных концов 49 и 50. Центральная часть 48 крыла 47 жестко закреплена в нижних точках остовов 4, 5 дирижаблей 2 и 3 и соединительной пространственной оболочки 37 воздухоплавательного роботизированного аппарата 1.
В нижней части крыла 47 спереди установлены модули 51 для диспергирования рабочих растворов пестицидов и удобрений. Во внутреннем пространстве центральной части 48 крыла установлен привод выдвижных концов 49 и 50 крыла 47 и гибкие гидравлические коммуникации для подачи к модулям 51 форсунок рабочих растворов пестицидов и удобрений.
Такая конструкция крыла 47 позволяет помимо повышения аэродинамических свойств воздухоплавательного роботизированного аппарата 1 выполнять роль носителя части полезной нагрузки в виде широкозахватного устройства с модулями 51 гидравлических форсунок для диспергирования рабочих растворов пестицидов и удобрений. При полном выдвижении концов 49 и 50 крыла 47 его длина предопределят конструктивную ширину захват Bp внесения средств защиты растений и удобрений.
Внутренняя часть соединительной пространственной оболочки 37 имеет носовую 52 и хвостовую 53 технические полости, между которыми размещены, по крайней мере, пять гидравлических резервуаров 54, 55, 56, 57 и 58. Резервуар 54 предназначен для топлива двигателей 29, 30, 31, 32, 33 и 34. Резервуары 55, 56, 57 и 58 заполняются средствами защиты растений, например, рабочими растворами гербицидов, фунгицидов, инсектицидов, азотных удобрений. Гидравлические резервуары 54, 55, 56, 57 и 58 отделены плоскими сегментными перегородками 59, 60, 61, 62, 63 и 64, выполняющими также роль элементов усиления и имеют двухсторонние торцовые поверхности 65 и 66, образованные в результате сопряжения поверхности пространственной соединительной оболочки 37 с боковыми поверхностями оболочек 6,7 дирижаблей 2, 3. Нижняя поверхность соединительной пространственной оболочки 37 является совокупным днищем резервуаров 54, 55, 56, 57 и 58, являющимся частью поверхности вытянутого эллипсоида вращения.
Выполнение технологического модуля в виде жесткой плоско-выпуклой пространственной оболочкой 37 в форме половины вытянутого эллипсоида вращения вдоль большей оси s-s обосновано тем, что постепенное и непрерывное изменение радиуса кривизны Ri пространственной оболочки 37 от центра к краю в плоскости, перпендикулярной осям симметрии а-а и b-b дирижаблей 1 и 2 и большей оси s-s пространственной оболочки 37 обеспечивает равномерное распределение внутренних напряжений и исключает опасные концентрации напряжений.
Такая конструкция технологического модуля повышает прочность и надежность воздухоплавательного роботизированного аппарата 1, увеличивает его полезную нагрузку, понижает центр тяжести, что повышает управляемость и устойчивость полета и, как следствие, надежность и безопасность полета воздухоплавательного роботизированного аппарата 1, обеспечивает заданное качество внесение средств защиты растений и удобрений, снижает риски загрязнения окружающей среды.
Технологический модуль в виде жесткой плоско-выпуклой пространственной оболочки в форме половины вытянутого эллипсоида вращения вдоль большей оси дает возможность иметь как плоскую мобильную воздушную взлетно-посадочную платформу, так и ряд сегментных технологических отсеков в виде гидравлических резервуаров.
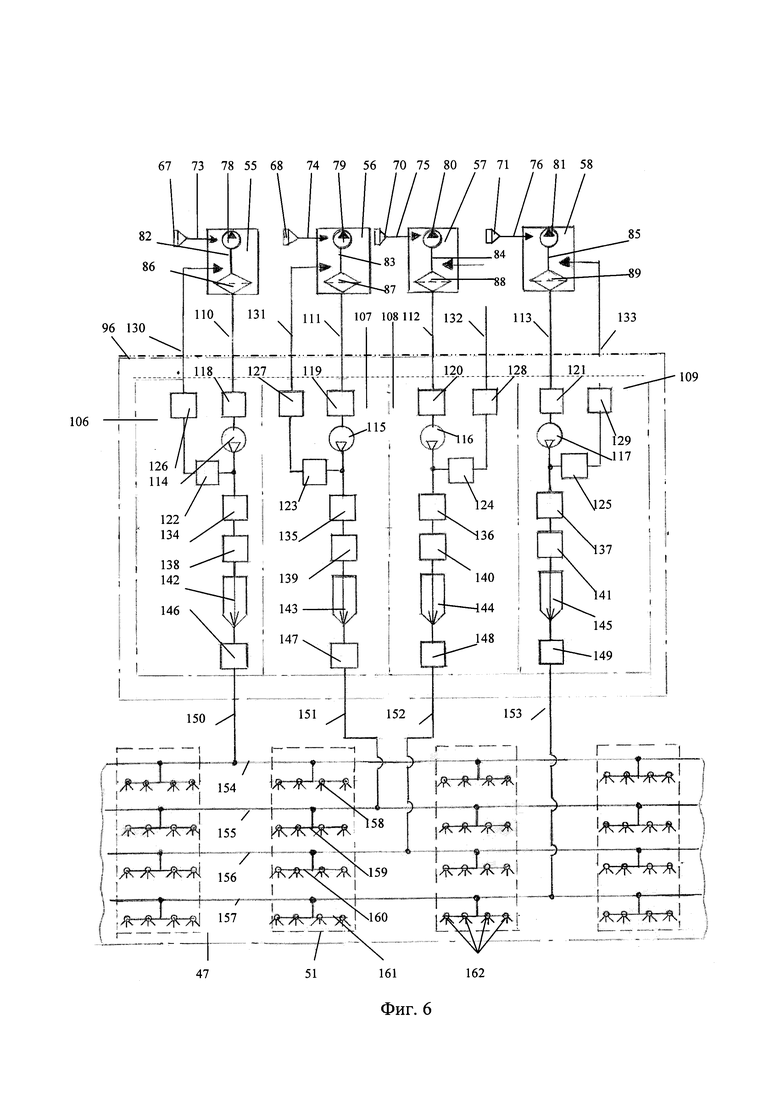
Хвостовая часть воздухоплавательного роботизированного аппарата 1 снабжена заправочными горловинами 67, 68, 69, 70, 71, каждая из которых соединена гидролиниями 72, 73, 74, 75 и 76, с соответствующим гидравлическим резервуаром 54, 55, 56, 57, 58.
В нижней части резервуара 54 установлен топливный насос 77 для подачи топлива к двигателям 29, 30, 31, 32, 33 и 34. В резервуарах 55, 56, 57 и 58 установлены электрогидравлические насосы - дозаторы 78, 79, 80 и 81, соединенные на выходе с автоматическими заправочными устройствами 45 для заправки БЛА удобрениями и средствами защиты растений и на входе гидролиниями 82, 83, 84 и 85 с фильтрами 86, 87, 88 и 89.
В хвостовой технической полости 53 размещен блок электропитания 90 с аккумуляторными батареями, соединенными с панелями солнечных батарей 35, 36 с одной стороны и другой стороны - с автоматизированной бортовой системой управления 91 воздухоплавательного роботизированного аппарата 1.
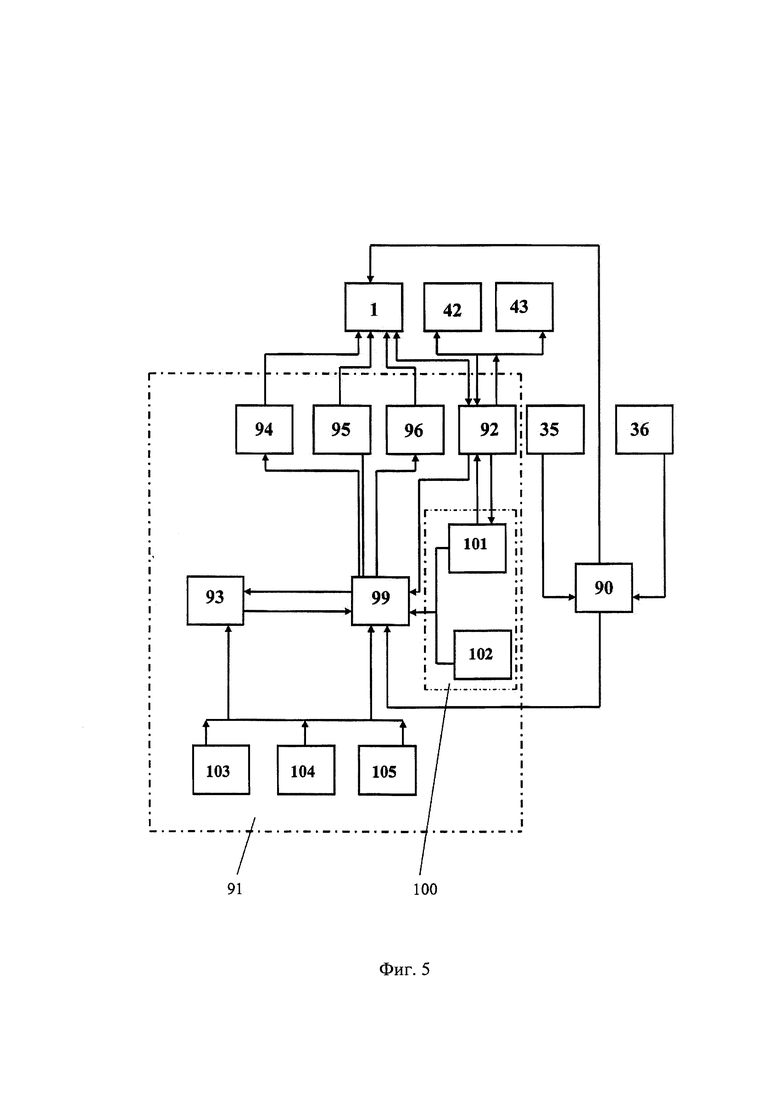
В носовой технической полости 52 воздухоплавательного роботизированного аппарата 1 установлена автоматизированная бортовая система управления 91, блок распределенной системы управления 92 полетом автономных БЛА 42 и 43, блок системы управления бортовым оборудованием 93, блок автоматического управления исполнительными механизмами 94, блок управления цифровой оптической системой 95, интегрированный в систему управления 91, блок автоматизированной системы распределения, дозирования и внесения средств защиты растений и удобрений 96. Сверху носовой 52 и хвостовой 53 технической полости установлены разнесенные по оси симметрии s-s антенны 97 и 98 приемников ГЛОНАСС/GPS.
Автоматизированная бортовая система управления 91 обеспечивает автоматический взлет и посадку, запрограммированный полет по заданному маршруту с заданной скоростью и высотой, автоматическое регулирование и стабилизацию углов ориентации (тангажа, рыскания, крена), принудительную посадку воздухоплавательного роботизированного аппарата 1 в экстренных случаях, управление его полезной нагрузкой.
Автоматизированная бортовая система управления 91 включает: центральный процессор 99 с оперативным и постоянным запоминающими устройствами для накопления, обработки и передачи информации с программным управлением бортовыми системами и модулем программного обеспечения обработки сельскохозяйственного поля в режимах «Of-lein» или «On-lein», комплексированную с центральным процессором 99 интегрированную навигационную систему 100, состоящую из модуля инерциальной навигационной системы 101 в виде триады цифровых инерциальных датчиков (гироскопов, акселерометров), объеденного с модулем спутниковой навигационной системы 102 в виде двух приемников ГЛОНАСС/GPS с антеннами 97 и 98 для определения координат и курсового угла воздухоплавательного роботизированного аппарата 1, при этом интегрирование данных, получаемых от навигационных систем 101 и 102 минимизирует погрешность определения координат воздухоплавательного роботизированного аппарата 1, модуль датчиков состояния 103 органов управления, дающий информацию о текущем состоянии органов управления; модуль датчиков внешней среды 104 (скорости и направления ветра, температуры, давления и влажности воздуха) и модуль измерения высоты полета в виде ультразвукового или лазерного высотомера 105.
Блок системы управления бортовым оборудованием 93 обеспечивает адекватное взаимодействие всех блоков и устройств воздухоплавательного роботизированного аппарата 1.
Блок распределенной системы управления взаимодействием и полетом 92 группы автономных БЛА 42 и 43 комплексирован с центральным процессором 99, интегрированной навигационной системой 100.
Блок инерциальной навигационной системы 101 в автоматическом режиме определяет и регистрирует с помощью акселерометров линейные ускорения и посредством гироскопов - углы поворота и наклоны, значения которых передаются в центральный процессор 99.
Блок спутниковой навигационной системы 102 позволяют определить текущие координаты воздухоплавательного роботизированного аппарата 1 в глобальной системе координат.
Блок распределенной системы управления 92 включает процессор с микроядерной операционной системой реального времени, осуществляющей управление полетом группы автономных БЛА 42 и 43, их взаимодействие с воздухоплавательным роботизированным аппаратом 1 и связь каждого из группы БЛА 42 и 43 между собой посредством специальной программной системой, являющейся резидентной базой, обеспечивающей распределение данных каждому из группы БЛА 42 и 43 в режиме реального времени.
В нижней части носовой технической полости 52 воздухоплавательного роботизированного аппарата 1 установлен блок цифровых оптических систем 95 для мониторинга сельскохозяйственных угодий, включающий систему технического зрения на базе телекамер, тепловизионную, фото- и гиперспектральную камеры (не показаны).
Блок автоматизированной системы распределением, дозированием и внесением средств защиты растений и удобрений 96 воздухоплавательного роботизированного аппарата 1 управляется от центрального процессора 99 и содержит отдельные модули подачи и дозирования 106, 107, 108, 109, соединенные всасывающими гидролиниями 110, 111, 112, 113 с соответствующими гидравлическими резервуарами 55, 56, 57 и 58. Модули подачи и дозирования 106, 107, 108 и 109 включают электрогидравлические насосные агрегаты 114, 115, 116 и 117, соединенные на входе через 114, 115, 116 и 117 электрогидравлические нормально закрытые запорные клапаны 118, 119, 120 и 121 с фильтрами 86, 87, 88 и 89 резервуаров 55, 56, 57 и 58. На выходе насосные агрегаты 114, 115, 116, 117 соединены байпасной системой через переливные пропорциональные электромагнитные клапаны 122, 123, 124 и 125, электрогидравлические нормально закрытые запорные клапаны 126, 127, 128 и 129, сливные гидролинии 130, 131, 132 и 133, с резервуарами 55, 56, 57 и 58. Напорная часть насосных агрегатов 114, 115, 116 и 117 включает электромагнитные редукционные клапаны 134, 135, 136 и 137 с цифровым пропорциональным управлением, электромагнитные расходомеры 138, 139, 140 и 141, дозаторы с электронным управлением 142, 143, 144 и 145, соединенные через электрогидравлические нормально закрытые запорные клапаны 146, 147, 148 и 149 напорными гидролиниями 150, 151, 152 и 153 с гидравлическими коммуникациями 154, 155, 156 и 157, каждая из которых соединена с модулями диспергирования 51, установленными в нижней части крыла с шагом, обеспечивающим не менее чем тройное перекрытие факелов распыла смежных форсунок на половине рабочей высоты полета воздухоплавательного роботизированного аппарата 1. Такое перекрытие факелов распыла уже на половине высоты полета обеспечивает равномерное распределение диспергируемых рабочих растворов, независимо от воздействия внешних факторов, влияющих на качество внесения пестицидов и удобрений.
Каждый из модулей 51 снабжен распределительными коллекторами 158, 159, 160 и 161 с установленными на них и управляемыми от центрального процессора 99 электрогидравлическими форсунками 162 не менее четырех типоразмеров с увеличением площади выходного отверстия сопла последующей форсунки не менее, чем на одну четвертую часть, имеющими электромагнитные клапаны с пропорциональным управлением (не показано). Модульная система построения диспергирования рабочих растворов обеспечивает различные варианты включения форсунок разного типоразмера в работу, что позволяет дифференцированно по дозам и нормам вносить удобрения и средств защиты растений. Увеличение площади выходного отверстия сопла последующей форсунки не менее чем на одну четвертую часть обосновано, прежде всего, необходимостью обеспечить дифференциацию доз при вегетативных азотных подкормках агроценозов в пределах 10-60 кг действующего вещества на гектар.
Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии работает следующим образом.
В центральный процессор 99 загружается полетное задание - маршрут полета. Полетное задание формируется в соответствии с программой обработки сельскохозяйственного поля в режимах «Off-line» или « On-lint».
Средние отсеки 16, 17 заполняются несущим газом легче воздуха, балластные емкости 18,19 носовых 12,13 и кормовых 14,15 отсеков заполняются сжатым воздухом.
В резервуар 54 через заправочную горловину 69 по гидролинии 72 закачивается топливо для двигателей 29, 30, 31, 32, 33, 34. Резервуар 55 через заправочную горловину 67 по гидролинии 73 заполняется раствором жидкого минерального удобрения, например, азотного для вегетативной некорневой подкормки сельскохозяйственных культур. Резервуары 56, 57, 58 через заправочные горловины 68, 70, 71 по гидролиниям 74, 75, 76 заполняются рабочими растворами средств защиты растений, например, гербицидами, инсектицидами, фунгицидами.
По мере загрузки воздухоплавательного роботизированного аппарата 1 с помощью системы сброса воздуха осуществляется сброс сжатого воздуха из балластных емкостей 18, 19, равный по весу заправляемому топливу, средствам защиты растений и удобрениям. Подъем воздухоплавательного роботизированного аппарата 1 обеспечивается за счет сброса балласта в виде сжатого воздуха, по весу, равного требуемой избыточной подъемной силе, поворотом в вертикальное положение и включением в работу передних 29, 30 и задних 31, 32 двигателей с переменным вектором тяги, подъемной силы на крыле при наличии некоторой скорости полета, что в совокупности поднимает воздухоплавательный роботизированный аппарата 1 от земли. После набора небольшой высоты, контролируемой модулем измерения высоты полета 105, двигатели 29, 30, 31, 32 переводятся горизонтальное положение и толкают воздухоплавательный роботизированный аппарат 1 вперед. При посадке двигатели 29, 30, 31, 32 вновь переходят в вертикальное положение, включаются на реверсивный режим, вследствие этого воздухоплавательный роботизированный аппарат 1 притягивается к земле.
Интегрированная навигационная система 100 осуществляет прием и обработку сигналов глобальных спутниковых навигационных систем GPS/ГЛОНАСС, регистрирует и обрабатывает текущие значения линейных и угловых ускорений, передает комплексную информацию на центральный процессор 99 о позиционировании и динамике движения в пространстве воздухоплавательного роботизированного аппарата 1.
Автоматизированная бортовая система управления 91 совместно с блоком системы управления бортовым оборудованием 93, блоком автоматического управления исполнительными механизмами 94 осуществляет управление полетом в соответствии с полетным заданием
В режиме «Off-line» воздухоплавательный роботизированный аппарат 1 зависает в начальной точке маршрута полета.
От центрального процессора 99 через блок распределенной системы управления полетом 92 дается команда на взлет БЛА 42 для дистанционного зондирования сельскохозяйственных полей по маршруту полета воздухоплавательного роботизированного аппарата 1.
БЛА 42 посредством блока устройств получения видовой информации выполняют цифровую съемку сельскохозяйственного поля и в режиме реального времени передают информацию в центральный процессор 99 о координатах и размерах участков засоренности поля сорными растениями, поражения вредителями и болезнями растений, требующих некорневой подкормки жидкими азотными удобрениями с учетом вегетационного индекса (NDVI). После выполнения программы полета БЛА 42 заходят на посадку, на взлетно-посадочную платформу 39 и встают на элементарные взлетно-посадочные площадки 40 посредством стыковки с устройством 45 для подзарядки аккумуляторных батарей от блока электропитания 90. Центральный процессор 99 обрабатывает полученные от БЛА 42 данные и формирует программу дифференцированной обработки сельскохозяйственного поля гербицидами, инсектицидами и фунгицидами, а также программу внесения дифференцированных доз азотных удобрений. После зарядки аккумуляторных батарей БЛА 42 осуществляют следующий этап дистанционного зондирования сельскохозяйственного поля.
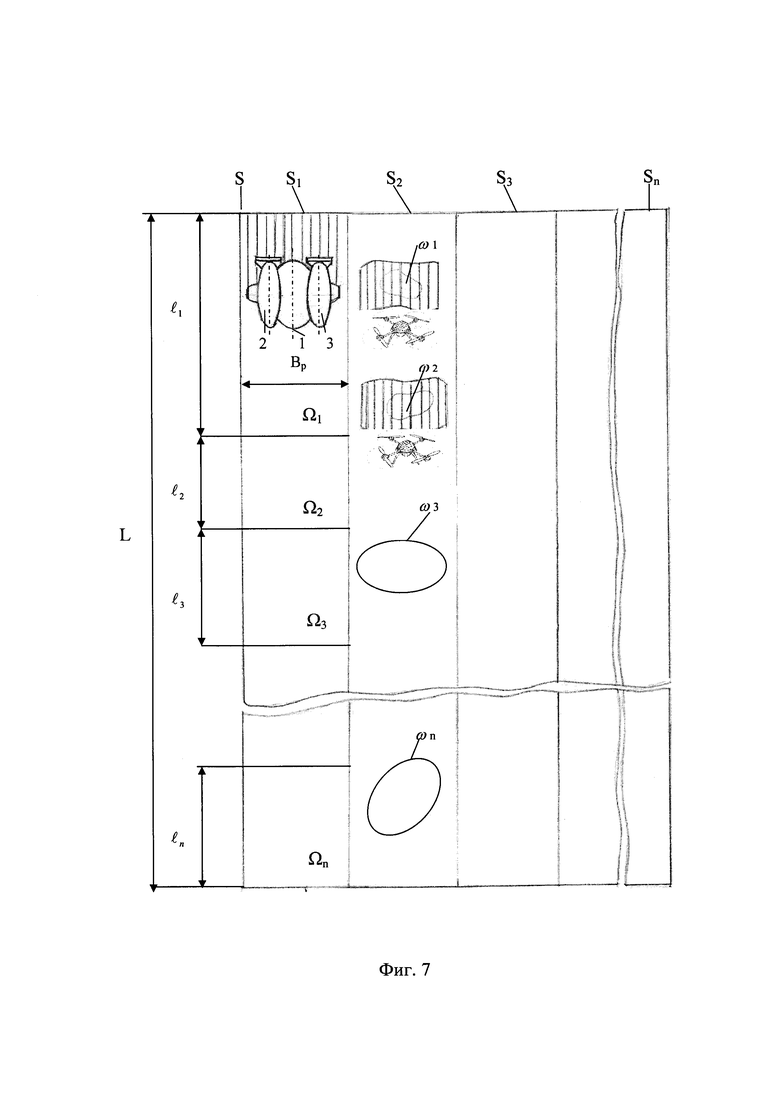
Программа обработки сельскохозяйственного поля общей площадью S в режиме «Of-lein» предусматривает разбивку поля на прямоугольные участки площадью S1, S2, S3, …, Sn-1, Sn шириной, равной конструктивной ширине захвата Bp воздухоплавательного роботизированного аппарата 1и длиной, равной длине гона L сельскохозяйственного поля. Каждый из участков S1, S2, S3, …, Sn-1, Sn сельскохозяйственного поля в свою очередь дифференцируется программой на элементарные участки Ω1, Ω12, Ω13, …, Ω n-1, Ωn, длиной l1, l2, l3, …, ln-1, ln, с необходимыми дозами внесения растворов минеральных удобрений, в частности азотных, нормами внесения рабочих растворов гербицидов, инсектицидов и фунгицидов.
Двигатели с переменным вектором тяги 29 30, 31, 32 устанавливаются в горизонтальное положение. Включаются в работу маршевые двигатели 33,34, воздухоплавательный роботизированный аппарат 1 перемещается к обрабатываемому полю. В процессе установившегося горизонтального полета воздухоплавательного роботизированного аппарата 1 текущее состояние органов управления контролируется датчиками 103 с передачей данных в блок системы управления бортовым оборудованием 93. Высота полета определяется и контролируется высотомером 105, действие внешних метереологических факторов контролируется датчиками внешней среды 104 с передачей данных в центральный процессор 99.
При достижении стартовых координат начала обработки сельскохозяйственного поля, определяемых интегрированной навигационной системой 100 в режиме реального времени, от центрального процессора 99 подается управляющий сигнал на введение в работу модулей подачи и дозирования 106, 107, 108,109 блока 96. Запорные клапаны 118, 119, 120, 121 и 146, 147, 148, 149 открываются, включаются насосные агрегаты 114, 115, 116, 117, посредством которых из гидравлических резервуаров 55, 56, 57, 58, по гидролиниям 110, 111, 112, 113 рабочие растворы удобрений и средств защиты растений поступают соответственно через редукционные клапаны 134, 135, 136, 137, расходомеры 138, 139, 140, 141 в дозаторы 142, 143, 144, 145, изменяющие и стабилизирующие расход рабочих растворов, которые далее поступают по напорным гидролиниями 150, 151, 152, 153 и гидравлическим коммуникациям 154, 155, 156, 157 в распределительные коллекторы 158, 159, 160, 161. В соответствии с программой дифференцированной обработки сельскохозяйственного поля воздухоплавательный роботизированный аппарата 1 начинает движение в режиме установившегося горизонтального полета на заданной высоте и по заданному маршруту. По сигналу от центрального процессора 99 с учетом координат элементарных участков поля, определяемых интегрированной навигационной системой 100, в модулях 51 открываются клапаны электрогидравлических форсунок 162 заданного типоразмера, и рабочие растворы посредством форсунок 162 диспергируются на участки агроценозов с переменным регулированием расходов для обеспечения дифференцированного внесения рабочих растворов азотных удобрений, гербицидов и других средств защиты растений с учетом неоднородности распределения минерального азота, сорных растений, вредителей и болезней на каждом из обрабатываемых участков Ω1, Ω2, Ω3, …, Ω n-1, Ωn сельскохозяйственного поля S. В случае, когда участки ω1, ω2 ω3, …, ωn-1, ωn засоренности поля сорными растениями, поражения вредителями и болезнями имеют локальный характер и значительно меньше участков Ω1, Ω2, Ω3, …, Ω n-1, Ωn, то они обрабатываются с помощью БЛА 43 параллельно с обработкой участков Ω1, Ω2, Ω3, …, Ω n-1, Ωn сельскохозяйственного поля S воздухоплавательным роботизированным аппаратом 1. В соответствие с программой обработки сельскохозяйственного поля S в бортовой компьютер каждого из БЛА 43 от центрального процессора 99 передается полетное задание и программа обработки участков ω1, ω2, ω3, …, ωn-1, ωn. Посредством автоматических устройств заправки 45 баки БЛА 43 заправляются рабочими растворами пестицидов. Запускаются двигатели БЛА 43, производится автоматический взлет, набор высоты, подлет к каждому из обрабатываемых участков ω1, ω2 ω3, …, ωn-1, ωn по заданному маршруту. Устанавливаются заданные параметры полета (высота, скорость полета, углы ориентации) при обработке участков. С помощью пилотажно-навигационного оборудования, определяются координаты положения БЛА 43 в пространстве с передачей данных на центральный процессор 99 и процессор блока распределенной системы управления взаимодействием и полетом 93. При достижении БЛА 43 координат начала локальных участков ω1, ω2, ω3, …, ωn-1, ωn происходит их обработка соответствующими средствами защиты растений посредством штангового рабочего органа с распылителями 46. Взаимодействие БЛА 42 и БЛА 43 между собой в группах, взаимодействие между собой групп БЛА 42 и БЛА 43 и каждого из группы БЛА 42, БЛА 43 с воздухоплавательным роботизированным аппаратом 1 осуществляется с помощью распределенной системы управления 92.
В режиме «On-lein» управление полетом воздухоплавательного роботизированного аппарата 1 в соответствии с введенным в центральный процессор 99 маршрутом полета осуществляет автоматизированная бортовая система управления 91 совместно с блоком системы управления бортовым оборудованием 93, блоком автоматического управления исполнительными механизмами 94.
В процессе установившегося горизонтального полета текущие и глобальные координаты местоположения воздухоплавательного роботизированного аппарата 1 в каждый данный момент времени определяются с помощью интегрированной навигационной системы 100. Включается в работу блок цифровых оптических систем 95. Информация о быстроменяющемся состоянии агроценозов, например, степень обеспеченности азотного питания растений, степени засоренности агроценозов сорными растениями, поражения вредителями и болезнями снимается с блока цифровых оптических систем 95 и передается в центральный процессор 99 с последующей обработкой данных. Дозы азотных удобрений, нормы внесения средств защиты растений устанавливаются в реальном масштабе времени в процессе полета воздухоплавательного роботизированного аппарата 1. От процессора 99 управляющие сигналы по соответствующему интерфейсу передаются в блок автоматизированной системы распределения, дозирования и внесения средств защиты растений и удобрений 96 к модулям подачи и дозирования 106, 107, 108, 109, которые включаются в работу соответственно при необходимости внесения рабочих растворов азотных удобрений, гербицидов, фунгицидов или инсектицидов на участках площадью S1, S2, S3, …, Sn-1, Sn шириной, равной конструктивной ширине захвата Bp воздухоплавательного роботизированного аппарата 1и длиной, равной длине гона L сельскохозяйственного поля. При этом изменение расхода рабочих растворов осуществляется как дозаторами 142, 143, 144, 145, так и модулями форсунок 51 за счет включения в работу, установленных на коллекторах 158, 159, 160, 161, форсунок 162. Автоматический переход на форсунки большего типоразмера или одновременно включение в работу нескольких форсунок 162 обеспечивает увеличение расхода и соответственно нормы внесения рабочих растворов. В свою очередь дозаторы 142, 143, 144, 145 стабилизируют расход рабочих растворов при переходе с одного типоразмера форсунок 162 на другой.
Использование воздухоплавательного роботизированного аппарата позволит повысить надежность и безопасность полета, производительность, эффективность и качество внесения средств защиты растений и удобрений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| Способ внесения средств биологической защиты растений в виде энтомофагов и устройство дозирования для его осуществления | 2024 |
|
RU2830613C1 |
| Беспилотный летательный аппарат для обработки пестицидами садовых деревьев и кустарников | 2023 |
|
RU2808292C1 |
| Беспилотный летательный аппарат для обработки пестицидами пропашных культур | 2023 |
|
RU2808295C1 |
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
| Комплекс летательных аппаратов для внесения жидких средств химизации в точном земледелии | 2016 |
|
RU2617163C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2811604C1 |
| Беспилотный летательный аппарат для определения содержания питательных веществ растений в почве | 2024 |
|
RU2827242C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
Изобретение относится к области сельскохозяйственного машиностроения. Воздухоплавательный роботизированный аппарат (1) для мониторинга и внесения средств защиты растений и удобрений в точном земледелии содержит два жестких дирижабля (2 и 3) в виде остовов (4 и 5) с оболочками (6 и 7). Оболочки (6 и 7) образуют полости с внутренними носовыми (12 и 13) и кормовыми (14 и 15) отсеками с балластными емкостями, средними (16 и 17) отсеками, заполненными газом легче воздуха. Воздухоплавательный роботизированный аппарат (1) оснащен стабилизаторами (20, 21, 22 и 23) с рулями направления (25 и 26) и высоты (27 и 28), крылом с выдвижными концами (49 и 50), силовыми установками с двигателями (29, 30, 31 и 32), панелями солнечных батарей (35 и 36), блоком электропитания с аккумуляторными батареями, соединяющей остовы жесткой плоско-выпуклой пространственной оболочкой (37) с носовыми и кормовыми техническими полостями, взлетно-посадочной платформой (39) с взлетно-посадочными площадками (40 и 41) для беспилотных летательных аппаратов (43), автономными беспилотными летательными аппаратами с вертикальным взлетом и посадкой (42), снабженные пилотажно–навигационным оборудованием, устройствами получения видовой информации и диспергирования рабочих растворов, автоматизированную бортовую систему управления, блоком системы управления бортовым оборудованием, блоком автоматического управления исполнительными механизмами, блоком управления цифровой оптической системой, блоком автоматизированной системы управления внесением средств защиты растений и удобрений, блоком цифровых оптических систем, модулями диспергирования удобрений и средств защиты растений. Технологический модуль в виде жесткой плоско-выпуклой пространственной оболочки (37) выполнен в форме половины тела эллипсоида вращения, вытянутого вдоль большой оси (s-s), являющейся одновременно осью симметрии воздухоплавательного роботизированного аппарата (1), параллельной продольным осям симметрии (a-a и b-b) дирижаблей (2 и 3), и малой осью (m-m), совпадающей с осью (n-n) симметрии воздухоплавательного роботизированного аппарата (1), перпендикулярной продольным осям симметрии (a-a и b-b) дирижаблей (2 и 3). Продольные (a-a и b-b) и поперечные (n-n) оси симметрии дирижаблей (3 и 3), большая (s-s) и малая (m-m) ось соединительной пространственной оболочки (37), лежат в одной плоскости (θ). Мобильная воздушная взлетно-посадочная платформа (39) разделена на элементарные взлетно-посадочные площадки (40 и 41) в форме квадратов, каждая из сторон которых, по крайней мере, больше на половину диаметра окружности, описывающей габаритные размеры каждого беспилотного летательного аппарата (42 и 43). Каждая взлетно-посадочная площадка (40 и 41) оборудована быстродействующими автоматическими устройствами стыковки-расстыковки для подзарядки аккумуляторных батарей и, дополнительно для беспилотных летательных аппаратов для внесения удобрений и средств защиты растений оборудована автоматическим устройством заправки. Во внутренней части соединительной пространственной оболочки (37) размещено, по крайней мере, пять гидравлических резервуаров, отделенных плоскими сегментными перегородками, имеющими двухсторонние торцовые поверхности, сопряженные с боковыми поверхностями оболочек (6 и 7) дирижаблей (2 и 3), и совокупное днище, являющееся частью поверхности вытянутого эллипсоида вращения. Хвостовая часть технической полости снабжена заправочными горловинами, каждая из которых соединена гидролиниями с соответствующим гидравлическим резервуаром. В резервуарах для средств защиты растений и удобрений установлены электрогидравлические насосы-дозаторы, соединенные на выходе с быстродействующими заправочными устройствами стыковки-расстыковки, и на входе - гидролиниями с фильтрами гидравлических резервуаров, к каждому из которых, в свою очередь, подсоединен отдельный модуль подачи и дозирования блока автоматизированной системы управления распределением, дозированием и внесением средств защиты растений и удобрений, интегрированного в систему управления воздухоплавательного роботизированного аппарата. Каждый модуль подачи и дозирования соединен гидролиниями с отдельной гидравлической коммуникацией, к каждой из которых подключены модули диспергирования. Модули диспергирования установлены в нижней части крыла с шагом, обеспечивающим не менее, чем тройное перекрытие факелов распыла смежных форсунок на половине рабочей высоты полета, и снабжены распределительными коллекторами с электрогидравлическими форсунками не менее четырех типоразмеров с увеличением площади выходного отверстия сопла каждой последующей форсунки не менее, чем на одну четвертую часть. Обеспечивается повышение надежности и безопасности полета, повышение производительности, эффективности и качества внесения средств защиты растений и удобрений. 7 ил.
Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений и удобрений в точном земледелии, содержащий два жестких дирижабля в виде остовов с оболочками, образующими полости с внутренними носовыми и кормовыми отсеками с балластными емкостями, средними отсеками, заполненными газом легче воздуха, стабилизаторы, рули направления и высоты, крыло с выдвижными концами, силовые установки с двигателями, панели солнечных батарей, блок электропитания с аккумуляторными батареями, соединяющую остовы жесткую плоско-выпуклую пространственную оболочку с носовыми и кормовыми техническими полостями, взлетно-посадочную платформу с взлетно-посадочными площадками для беспилотных летательных аппаратов, автономные беспилотные летательные аппараты с вертикальным взлетом и посадкой, снабженные пилотажно–навигационным оборудованием, устройствами получения видовой информации и диспергирования рабочих растворов, автоматизированную бортовую систему управления, блок системы управления бортовым оборудованием, блок автоматического управления исполнительными механизмами, блок управления цифровой оптической системой, блок автоматизированной системы управления внесением средств защиты растений и удобрений, блок цифровых оптических систем, модули диспергирования удобрений и средств защиты растений, отличающийся тем, что технологический модуль в виде жесткой плоско-выпуклой пространственной оболочки выполнен в форме половины тела эллипсоида вращения, вытянутого вдоль большой оси, являющейся одновременно осью симметрии воздухоплавательного роботизированного аппарата, параллельной продольным осям симметрии дирижаблей, и малой осью, совпадающей с осью симметрии воздухоплавательного роботизированного аппарата, перпендикулярной продольным осям симметрии дирижаблей, причем продольные и поперечные оси симметрии дирижаблей, большая и малая ось соединительной пространственной оболочки лежат в одной плоскости, а мобильная воздушная взлетно-посадочная платформа разделена на элементарные взлетно-посадочные площадки в форме квадратов, каждая из сторон которых, по крайней мере, больше на половину диаметра окружности, описывающей габаритные размеры каждого беспилотного летательного аппарата, при этом каждая взлетно-посадочная площадка оборудована быстродействующими автоматическими устройствами стыковки-расстыковки для подзарядки аккумуляторных батарей и, дополнительно для беспилотных летательных аппаратов для внесения удобрений и средств защиты растений, оборудована автоматическим устройством заправки, во внутренней части соединительной пространственной оболочки размещено, по крайней мере, пять гидравлических резервуаров, отделенных плоскими сегментными перегородками, имеющими двухсторонние торцовые поверхности, сопряженные с боковыми поверхностями оболочек дирижаблей, и совокупное днище, являющееся частью поверхности вытянутого эллипсоида вращения, хвостовая часть технической полости снабжена заправочными горловинами, каждая из которых соединена гидролиниями с соответствующим гидравлическим резервуаром, при этом в резервуарах для средств защиты растений и удобрений установлены электрогидравлические насосы–дозаторы, соединенные на выходе с быстродействующими заправочными устройствами стыковки-расстыковки, и на входе - гидролиниями с фильтрами гидравлических резервуаров, к каждому из которых, в свою очередь, подсоединен отдельный модуль подачи и дозирования блока автоматизированной системы управления распределением, дозированием и внесением средств защиты растений и удобрений, интегрированного в систему управления воздухоплавательного роботизированного аппарата, и каждый модуль подачи и дозирования соединен гидролиниями с отдельной гидравлической коммуникацией, к каждой из которых подключены модули диспергирования, при этом модули диспергирования установлены в нижней части крыла с шагом, обеспечивающим не менее, чем тройное перекрытие факелов распыла смежных форсунок на половине рабочей высоты полета, и снабжены распределительными коллекторами с электрогидравлическими форсунками не менее четырех типоразмеров с увеличением площади выходного отверстия сопла каждой последующей форсунки не менее, чем на одну четвертую часть.
| Комплекс беспилотных летательных средств на базе аэростатического летательного аппарата | 2018 |
|
RU2681966C1 |
| CS 227818 B1, 14.05.1984 | |||
| DE 19621515 A1, 04.09.1997 | |||
| US 6769493 B1, 03.08.2004. | |||

