Область техники, к которой относится изобретение
Группа изобретений относится к сельскому хозяйству, в частности, к способам биологической защиты растений с помощью энтомофагов. Более конкретно группа изобретений относится к способу селективного внесения энтомофагов и комплексу для его осуществления.
Уровень техники
Из уровня техники известны способ и устройство одновременного дифференцированного внесения сыпучих агрохимикатов и сева (см. RU 2643258 C2, опуб. 31.01.2018). При этом способ включает в себя операции по формированию заданных доз агрохимикатов и внесению их путем автоматического регулирования расхода рабочих органов. Для формирования заданных доз производят периодический отбор проб на малых тестовых площадках, расположенных рядом с основным полем, на которых возделывается одна и та же культура, как и на основном поле. Объемные дозаторы выполнены в виде шаговых двигателей с внешним ротором в виде зубчатых венцов для дозированной подачи агрохимиката, снизу которых установлены тройники, на выходе которых установлены весовые дозаторы, выполненные в виде поворотных управляемых весочувствительных заслонок, а боковые входы тройников соединены с воздухопроводами, оборудованными запорными электромагнитными клапанами.
Недостатками известной группы изобретений являются громоздкость применяемого оборудования, длительность выполняемых процессов при осуществлении, низкая универсальность оборудования, отсутствие возможности внесения энтомофагов.
Из уровня техники также известен воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии (см. RU 2703198 C1, опуб. 15.10.2019). Аппарат относится к области сельскохозяйственного машиностроения, содержит два жестких дирижабля в виде остовов с оболочками. Оболочки образуют полости с внутренними носовыми и кормовыми отсеками с балластными емкостями, средними отсеками, заполненными газом легче воздуха. Аппарат оснащен стабилизаторами с рулями направления и высоты, крылом с выдвижными концами, силовыми установками с двигателями, панелями солнечных батарей, блоком электропитания с аккумуляторными батареями, соединяющей остовы жесткой плоско-выпуклой пространственной оболочкой с носовыми и кормовыми техническими полостями, взлетно-посадочной платформой с взлетно-посадочными площадками для беспилотных летательных аппаратов, автономными беспилотными летательными аппаратами с вертикальным взлетом и посадкой, снабженные пилотажно-навигационным оборудованием, устройствами получения видовой информации и диспергирования рабочих растворов, автоматизированную бортовую систему управления, блоком системы управления бортовым оборудованием, блоком автоматического управления исполнительными механизмами, блоком управления цифровой оптической системой, блоком управления цифровой оптической системой, блоком автоматизированной системы управления внесением средств защиты растений и удобрений, блоком цифровых оптических систем, модулями диспергирования удобрений и средств защиты растений.
Недостатками известного изобретения также являются громоздкость применяемого оборудования, длительность выполняемых процессов при осуществлении, низкая универсальность оборудования, отсутствие возможности внесения энтомофагов.
Наиболее близким аналогом, выбранным в качестве прототипа, является способ внесения сыпучих средств защиты растений и комплекс для его осуществления (см. RU 2694502 C2, опуб. 15.07.2019). Группа изобретений относится к области сельскохозяйственного машиностроения. Способ предусматривает определение границ поля, точек сброса сыпучих средств защиты растений, заполнение емкости сыпучими средствами защиты растений и запуск беспилотного летательного аппарата. Основываясь на информации GPS-комплекса о местоположении летательного аппарата, в точках сброса сыпучих средств защиты растений блок управления запускает электродвигатель дозатора, в который через гофрированную трубу под собственным весом поступают средства защиты растений и попадают на дозирующее колесо. Переменный резистор определяет количество оборотов дозирующего колеса, лежащих в диапазоне 40-60 об/мин, подстроечный резистор устанавливает расход смеси в г/км. Далее происходит сброс дозы сыпучих средств защиты растений, а пропорционально-интегрально-дифференцирующий регулятор в соответствии с показаниями датчика Холла контролирует процесс сброса смеси, уменьшая или увеличивая их дозировку. Комплекс содержит емкость для сыпучих средств защиты растений, дозатор, связанный посредством гибкой гофрированной трубы с емкостью для сыпучих средств защиты растений. Дозатор выполнен в виде барабана с отверстием для сброса средств защиты растений. Внутри барабана расположены электродвигатель, редуктор, вал редуктора, дозирующее колесо с расположенными на нем неодимовыми магнитами и датчиком, и выполненным в виде крыльчатки, в которой объем между лопастями равен 0,2 грамма. Между корпусом дозатора и дозирующим колесом установлена мягкая прокладка, предохраняющая от избыточного поступления сыпучих средств защиты растений. Электродвигатель посредством кабелей подключен к блоку управления, на внешней стороне которого находятся LED-дисплей, переменный резистор и подстроечный резистор. В блоке управления установлен пропорционально-интегрально-диффернцирующий регулятор, подключенный к датчику Холла посредством кабелей, что позволяет контролировать процесс сброса смеси. Комплекс выполнен с возможностью установки на беспилотном летательном аппарате, снабженном GPS-компасом, связанным с блоком управления.
Недостатками прототипа являются сложность применяемого оборудования, низкая универсальность оборудования, отсутствие возможности внесения энтомофагов.
Технической задачей группы изобретений является преодоление недостатков вышеотраженного уровня техники.
При решении технической задачи группой изобретений достигается технический результат, заключающийся в создании способа и комплекса внесения биологической защиты растений в виде энтомофагов, которые являются менее сложными и более универсальными.
Раскрытие сущности изобретения
Изобретение представляет собой способ внесения средств биологической защиты растений в виде энтомофагов, заключающийся в их дозированном сбросе в целевых точках, при этом согласно изобретению доставка энтомофагов к месту сброса осуществляется летательным аппаратом, к которому прикреплено устройство дозирования, представляющее собой корпус с расположенными в нем энтомофагами, при этом энтомофаги сбрасывают по команде контроллера, получающего данные от GPS-модуля, и/или на основе пройденного расстояния, и/или на основе времени полета, и передающего сигнал на сброс приводу устройства дозирования.
При этом дополнительно контролируют процесс внесения энтомофагов и отрабатывают сбои в системах устройства дозирования.
По дополнительному варианту изобретение представляет собой устройство дозирования для осуществления способа внесения средств биологической защиты растений в виде энтомофагов, представляющее собой корпус с расположенными в нем энтомофагами, выполненный с возможностью закрепления на корпусе летательного аппарата, содержащее контроллер, выполненный с возможностью получать данные от GPS-модуля, и/или на основе пройденного расстояния, и/или на основе времени полета, и передавать сигнал на сброс энтомофагов приводу устройства дозирования, которое в свою очередь взаимодействует с шестерней дозирующего блока, поворот которой приводит к сбросу энтомофагов.
При этом устройство дозирования является автономным от систем летательного аппарата.
А корпус дозатора имеет облегченную отверстиями конструкцию.
Краткое описание чертежей
Сущность группы изобретений дополнительно пояснена сопроводительными фигурами, на которых показаны неограничивающие примеры осуществления.
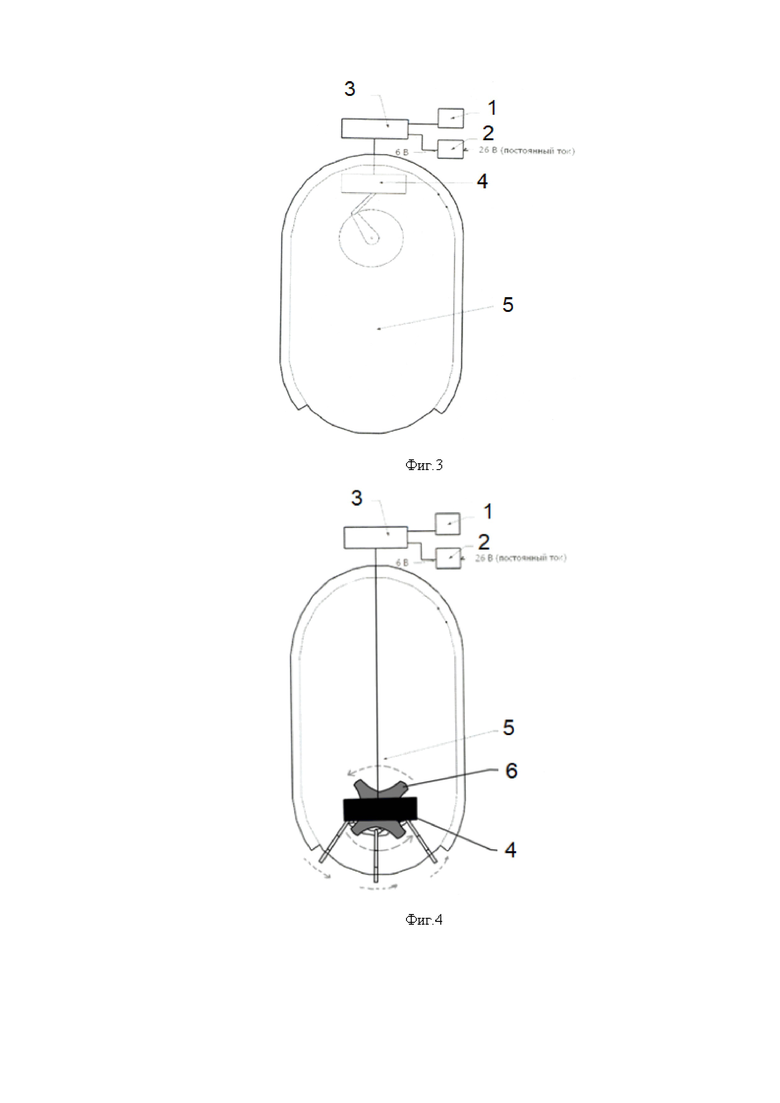
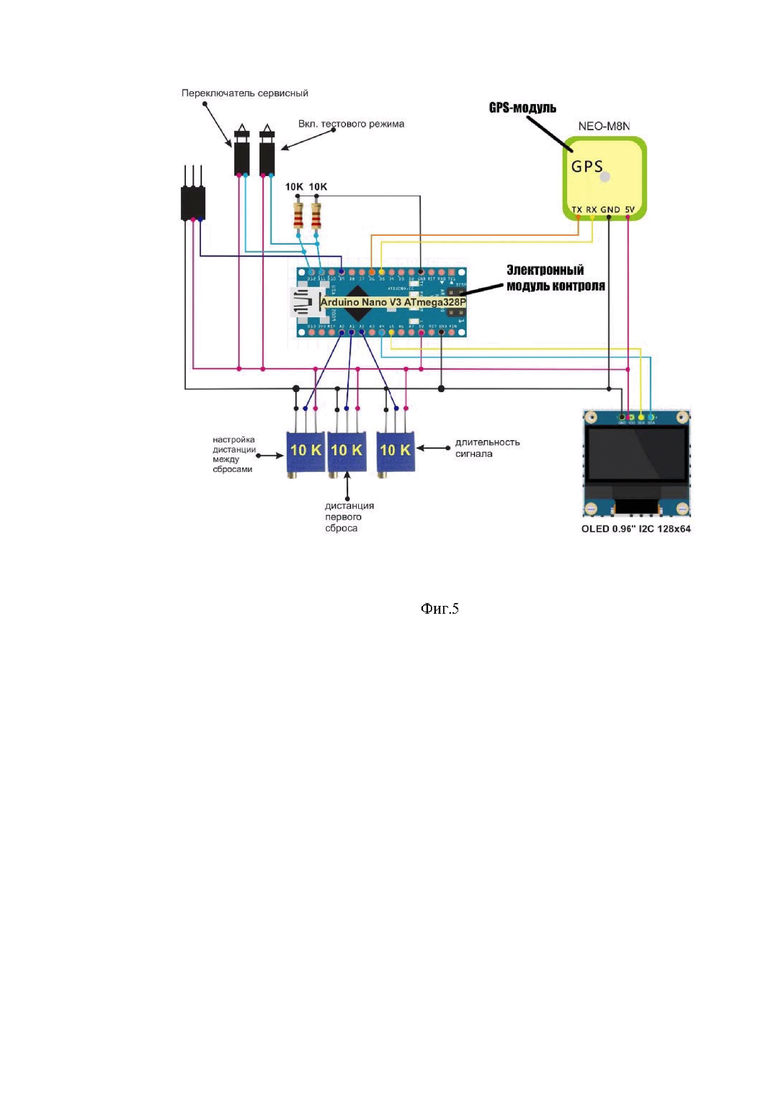
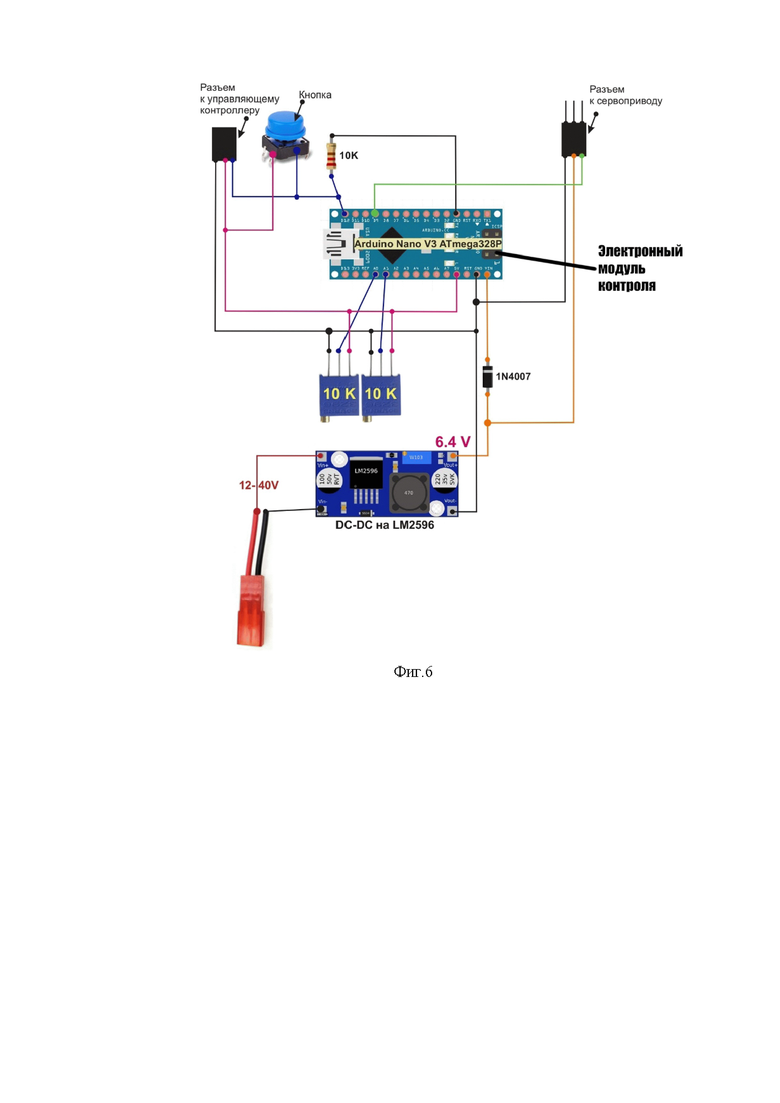
На сопроводительных фигурах показано следующее: фиг.1 - фото устройства дозирования; фиг.2 - фото примера закрепления устройства дозирования на летательном аппарате; фиг.3 - первый пояснительный вариант возможности выполнения устройства дозирования (где отдельными позициями показаны 1 - GPS-модуль, 2 - бортовой блок питания, 3 - контроллер, 4 привод, 5 - дозирующий блок); фиг.4 - второй пояснительный вариант возможности выполнения устройства дозирования (где позиции 1-5 аналогичны фиг.3, 6 - шестерня); фиг. 5 - схема 1, входящая в состав контроллера (подробнее функционал будет раскрыт ниже); фиг. 6 - схема 2, входящая в состав контроллера (подробнее функционал будет раскрыт ниже).
Осуществление изобретения
Способ внесения средств биологической защиты растений в виде энтомофагов заключается в их дозированном сбросе в целевых точках. Доставка энтомофагов к месту сброса осуществляется летательным аппаратом, к которому прикреплено устройство дозирования.
Устройство дозирования представляет собой корпус с расположенными в нем энтомофагами. При этом энтомофаги сбрасывают по команде контроллера 3, получающего данные от GPS-модуля 1, и/или на основе пройденного расстояния, и/или на основе времени полета, и передающего сигнал на сброс приводу 4 устройства дозирования.
При этом дополнительно контролируют процесс внесения энтомофагов и отрабатывают сбои в системах устройства дозирования.
Устройство дозирования для осуществления способа внесения средств биологической защиты растений в виде энтомофагов представляет собой корпус с расположенными в нем энтомофагами, выполненный с возможностью закрепления на корпусе летательного аппарата.
Устройство дозирования содержит контроллер 3, выполненный с возможностью получать данные от GPS-модуля 1, и/или на основе пройденного расстояния, и/или на основе времени полета, и передавать сигнал на сброс энтомофагов приводу 4 устройства дозирования, которое в свою очередь взаимодействует с шестерней 6 дозирующего блока, поворот которой приводит к сбросу энтомофагов.
Устройство дозирования является автономным от систем летательного аппарата.
А корпус дозатора имеет облегченную отверстиями конструкцию.
Неограничивающие примеры осуществления группы изобретений.
Группа изобретений может быть осуществлена при применении на любом виде летательных аппаратов, применяемых в сельском хозяйстве, наиболее предпочтительными являются сверхлегкие летательные аппараты, в частности известные и перспективные беспилотные летательные аппараты, теоретически позволяющие осуществить заявленную группу изобретений.
На основании данных, получаемых от GPS-модуля, расположенного на корпусе дозатора, о местоположении беспилотного летательного аппарата (далее - БЛА), в точках сброса средств защиты растений (далее - СЗР) блок управления запускает электродвигатель дозатора, который активирует работу вращательного механизма, предназначенного для сброса СЗР под тяжестью собственного веса.
Бортовая цифровая вычислительная машина (далее - БЦВМ), выполненная, например на базе контроллера, путем расчета пройденной дистанции и/или времени, получает информацию от GPS-модуля и автоматически рассчитывает необходимость сброса кассеты. Далее происходит сброс подготовленных СЗР, а микропроцессорная система управления с регулятором, установленная в корпусе БЛА, контролирует процесс сброса СЗР, уменьшая или увеличивая их дозировку.
В качестве СЗР в заявленной группе изобретений отражены энтомофаги, при этом данная группа изобретений может распространяться на любой морфологический вид/форму энтомофага: в виде яиц/личинки, в виде нимфы, и/или в виде имаго, а также на любой вид носителя СЗР, в частности, в виде кассет, ампул, капсул, гранул, в которых размещены энтомофаги.
Кроме того, группа изобретений может быть осуществлена как в привязке к гео-данным, так и на основании данных о пройденном расстоянии без учета данных о местоположении летательного аппарата и локальных точек сброса средств защиты, и/или на основе данных таймера.
Также внесение средств защиты возможно с использованием различных пространственных схем, например, по выделенным очагам воздействия, по контуру посевных площадей, во схеме волнообразной формы на всю площадь поля, или по любой другой при необходимости, что не является ограничением для осуществления группы изобретений.
При построении полетного задания БЛА оператор назначает точки сброса энтомофагов для биологической защиты растений. После ввода программы полета в БЦВМ и разрешения от оператора на выполнение полёта, БЛА совершает полёт по заданному маршруту с использованием мультисистемного потопривязчика GPS-модуля, в заданных точках маршрута БЦВМ выдаёт на выходы управляющий сигнал, который получает и обрабатывает микропроцессорная система управления дозатором.
Программное обеспечение дозатора позволяет контролировать процесс внесения СЗР и отрабатывать сбои в системах дозатора с передачей информации на БЦВМ для дальнейшего принятия решения о прекращении или продолжении выполнения полетного задания, в зависимости от категории сбоя.
Например, если в каком-то месте маршрута не был выполнен сброс носителя с СЗР, но оборудование способно дальше функционировать исправно, нет смысла прерывать выполнение полетного задания, достаточно зарегистрировать характер и место сбоя и в дальнейшем внести коррективы в следующее полетное задание. Это позволяет гарантировать качество внесения СЗР и исправлять ошибки внесения. После того как носители с СЗР заканчиваются, система управления дозатором выдаёт команду на БЦВМ БЛА о прекращении работы дозатора и полет по маршруту прекращается. Зарядка носителей с СЗР в дозатор производится так же под контролем системы управления дозатором, есть возможность заряжать вручную с панели управления дозатором или в полуавтоматическом режиме.
Также приводим неограничивающие примеры реализации устройства дозирования на фиг.3 и 4, с привлечением фиг.5 и 6.
Дозирующее устройство содержит:
1. Контроллер, размещаемый на корпусе БЛА, который включает в себя две подсистемы (схема 1 (фиг.5) и схема 2 (фиг.6)).
2. На схеме 1 изображена подсистема БЦВМ, отвечающая за пространственную навигацию и подачу сигнала на подсистему привода, изображенную на схеме 2.
3. На схеме 2 изображена подсистема привода, отвечающая за совершение движения вращательного механизма и сброса носителя СЗР.
Дозирующий блок фактически является внешним корпусом устройства и хранилищем СЗР, предназначенных для внесения. Его конструктивными особенностями являются облегченность конструкции с сотообразными отверстиями.
4. Составные части системы управления соединены элементами крепления к ней (устройства крепления полезных нагрузок). Расположение элементов или узлов системы не имеет значения. Непосредственно подсистема БЦВМ, соединенная проводами с подсистемой привода, могут быть расположены как на корпусе БЛА, так и на корпусе дозирующего блока. Его особенностью является универсальность и независимость от систем БЛА, позволяющая ему функционировать автономно.
В рамках последующей модификации в устройство дозатора были внесены обновления, отраженные на фиг.4:
1. Расположение системы привода вращательного механизма было изменено. Элемент был перенесен в нижнюю часть корпуса устройства для повышения КПД работы дозатора.
2. «Шестерня», приводящая в действие основной вращательный механизм, была изменена на более упрощенную версию. Ранее используемый принцип тяги привода был заменен на вращательный принцип. Форма круглой «шестерни», имеющей внутренние отверстия для зацепа связующих элементов механизма, была изменена на Х-образную шестерню с 4 зубьями для вращения кассет СЗР.
Преимуществами группы изобретений является принцип эффективного пространственного распределения средств биологической защиты растений. Кроме того, преимуществом будет являться модульность конструкции, позволяющая при внесении незначительных модификаций применять на различных классах летательных аппаратов, а также внесения различных видов средств биологической защиты растений. Модульность обеспечивается за счет конструкции в целом, опять-таки, упомянутая ранее независимость расположения элементов всей системы. Блок управления, блок навигации, дозирующий блок работают автономно и независимо от БЛА. Фактически устройство допустимо к установке на любом виде транспортных средств при наличии соответствующих креплений или иных соединяющих элементов.
Таким образом, группой изобретений достигается технический результат, заключающийся в создании способа и комплекса внесения биологической защиты растений в виде энтомофагов, которые являются менее сложными и более универсальными.
Описание изобретения позволяет осуществить заявленную группу изобретений специалистом в данной области техники.
Поиск по общедоступным источникам информации показал, что из уровня техники не известна и явным образом не следует вся совокупность признаков предложенной группы изобретений, в связи с чем группа изобретений соответствует условиям патентоспособности «новизна» и «изобретательский уровень».
Заявленная группа изобретений состоит из стандартных для этой области техники материалов, устройств, элементов и стадий, выполненных в определенной последовательности, то есть может быть использована в промышленности, ввиду чего группа изобретений соответствует условию патентоспособности «промышленная применимость».
Следует понимать, что после рассмотрения специалистом приведенного описания с примером осуществления предлагаемой группы изобретений, для него станут очевидными другие изменения, модификации и варианты реализации. Таким образом, все подобные изменения, модификации и варианты реализации, а также другие области применения, не имеющие расхождений с сущностью настоящей группы изобретений, следует считать защищенными настоящим изобретением в объеме прилагаемой формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ внесения сыпучих средств защиты растений и комплекс для его осуществления | 2018 |
|
RU2694502C1 |
| Способ ультрамалообъемного опрыскивания сельскохозяйственных растений и устройство для его осуществления с использованием беспилотных авиационных средств вертолетного типа | 2019 |
|
RU2730640C1 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| Беспилотный летательный аппарат для внесения отравленных приманок | 2023 |
|
RU2811180C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
| Комплекс летательных аппаратов для внесения жидких средств химизации в точном земледелии | 2016 |
|
RU2617163C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ВЫДАЧИ МНОЖЕСТВА ПРОДУКТОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО НАЗНАЧЕНИЯ С НИЗКИМ РАСХОДОМ | 2019 |
|
RU2807065C2 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2811604C1 |
| Беспилотный летательный аппарат для обработки пестицидами пропашных культур | 2023 |
|
RU2808295C1 |

Группа изобретений относится к сельскому хозяйству, в частности к способам биологической защиты растений с помощью энтомофагов. Способ внесения средств биологической защиты растений в виде энтомофагов заключается в их дозированном сбросе в целевых точках. При этом доставка энтомофагов к месту сброса осуществляется летательным аппаратом (БПЛА), к которому прикреплено устройство дозирования, автономное от систем БПЛА, представляющее собой корпус с расположенными в нем энтомофагами. Энтомофаги сбрасывают по команде контроллера по данным от GPS-модуля, и/или на основе пройденного расстояния, и/или на основе времени полета и передающего сигнал на сброс приводу устройства дозирования. Устройство дозирования для осуществления способа представляет собой корпус, выполненный с возможностью закрепления на корпусе летательного аппарата. Устройство содержит контроллер, получающий данные от GPS-модуля, и/или на основе пройденного расстояния, и/или на основе времени полета. Обеспечивается создание способа и комплекса внесения биологической защиты растений в виде энтомофагов, которые являются менее сложными и более универсальными. 2 н. и 2 з.п. ф-лы, 6 ил.
1. Способ внесения средств биологической защиты растений в виде энтомофагов, заключающийся в их дозированном сбросе в целевых точках, отличающийся тем, что доставка энтомофагов к месту сброса осуществляется летательным аппаратом, к которому прикреплено устройство дозирования, являющееся автономным от систем летательного аппарата и представляющее собой корпус с расположенными в нем энтомофагами, при этом энтомофаги сбрасывают по команде контроллера, получающего данные от GPS-модуля, и/или на основе пройденного расстояния, и/или на основе времени полета и передающего сигнал на сброс приводу устройства дозирования.
2. Способ внесения средств биологической защиты растений в виде энтомофагов по п.1, отличающийся тем, что дополнительно контролируют процесс внесения энтомофагов и отрабатывают сбои в системах устройства дозирования.
3. Устройство дозирования для осуществления способа по п.1, являющееся автономным от систем летательного аппарата и представляющее собой корпус с расположенными в нем энтомофагами, выполненный с возможностью закрепления на корпусе летательного аппарата, содержащее контроллер, выполненный с возможностью получать данные от GPS-модуля, и/или на основе пройденного расстояния, и/или на основе времени полета и передавать сигнал на сброс приводу устройства дозирования, которое в свою очередь взаимодействует с шестерней дозирующего блока, поворот которой приводит к сбросу энтомофагов.
4. Устройство дозирования по п.3, отличающееся тем, что корпус дозатора имеет облегченную отверстиями конструкцию.
| ВАКУУМНЫЙ РОТАЦИОННЫЙ НАСОС | 1967 |
|
SU222585A1 |
| БПЛА И СПОСОБ ВЫПОЛНЕНИЯ АЭРОФОТОСЪЕМКИ | 2022 |
|
RU2798604C1 |
| СПОСОБ ДИФФУЗИОННОГО СИЛИЦИРОВАНИЯ СПЛАВОВ НА ОСНОВЕ ЖЕЛЕЗА | 0 |
|
SU195282A1 |
| Способ интенсификации теплообмена | 1961 |
|
SU144500A1 |
| EP 3932166 A1, 05.01.2022 | |||
| КРУГЛОВЯЗАЛЬНАЯ МАШИНА | 0 |
|
SU182835A1 |

