Изобретение относится к сельскому хозяйству, в частности к беспилотным летательным аппаратам для обработки пестицидами пропашных культур.
Известен беспилотный летательный аппарат (БЛА) для обработки растений, содержащий корпус, соединенные с корпусом лучи, винтомоторную группу, состоящую из бесколлекторных двигателей, регуляторов хода и винтов, аккумулятор, вычислительный блок, выполненный в виде процессора или микроконтроллера с возможностью обработки данных зоны обработки растений, построения карт маршрута полета и передачи данных модулю управления системой обработки, блок памяти выполнен в виде модуля флэш-памяти, содержащей информацию о координатах маршрута полета летательного аппарата, навигационную систему, средства беспроводного приема-передачи информации; соединенную с корпусом, установленную на корпусе систему обработки растений в виде форсуночного опрыскивателя или генераторов горячего или холодного тумана, установленную на мультироторной системе емкость с химикатами для обработки растений, с датчиком уровня жидкости химикатов, соединенную с системой обработки растений, модуль управления системой обработки растений, выполненный с возможностью активации и управления мощностью опрыскивания растений, модуль узкополосной мультиспектральной фотофиксации, выполненный с возможностью получения спектральных изображений растений, датчик контроля заряда аккумулятора, датчик проверки уровня химикатов, выполненный с возможностью генерирования сигнала для вычислительного блока о необходимости возврата для дозаправки при достижении заданного уровня химикатов, датчиком контроля заряда аккумулятора, выполненный с возможностью генерирования сигнала для вычислительного блока о необходимости замены аккумулятора (патент RU 179386, МПК B64D 1/18, 2017).
Недостатком известного устройства является то, что при поверхностной сплошной обработке сельскохозяйственных пропашных культур инсектицидами или обработке междурядий гербицидами имеет место нежелательная обработка междурядий инсектицидами или нежелательная обработка гербицидами растений соответственно, и, как следствие, излишний расход пестицидов, также происходит дрейф рабочей жидкости из зоны обработки и загрязнение окружающей среды химикатами.
Известен беспилотный летательный аппарат для внесения пестицидов в точном садоводстве, содержащий корпус, соединенные с корпусом радиальные кронштейны, бесколлекторные двигатели, винты, аккумулятор, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией, полезной нагрузкой, технологический модуль полезной нагрузки, включающий блок для размещения и подачи рабочих жидкостей, блок регулирования и распределения потоков рабочей жидкости, модуль датчиков внешней среды, модуль измерения высоты полета, бесконтактные ультразвуковые датчики расстояния с направлением осей ультразвуковых потоков, соответственно, на крону обрабатываемых деревьев, кустарников и на почву, спектральные датчики распознавания вредителей и болезней, соединенные линиями связи с контроллером, П-образную секционную штангу выполненную в виде взаимосвязанных горизонтальных и вертикальных телескопических секций с механизмами выдвижения - втягивания звеньев вертикальных секций, при этом механизмы выдвижения-втягивания звеньев вертикальных секций установлены на концах последних звеньев горизонтальных секций штанги, а у горизонтальных секций - в центральной части корпуса летательного аппарата и соединены линией связи с контроллером, длина звеньев каждой секции штанги, предпочтительно, равна шагу расстановки распылителей, установленных на каждом из звеньев секции штанги и соединены линией связи с контроллером, при этом распылители установлены с шагом, обеспечивающим возможность перекрытия факелов распыла от смежных распылителей не менее чем на три четверти ширины факела одного из них. (патент RU 2793020, МПК B64U 10/10, B64U 101/40, А01М 7/00, B64D 1/18, 2023).
Недостатком известного устройства является то, что при его использовании для обработки пропашных культур обрабатывается только один ряд растений - это снижает его производительность, возможна неравномерная обработка растений рабочей жидкостью пестицида и, как следствие, снижение эффективности обработки.
Технической задачей изобретения является повышение производительности, качества и эффективности обработки пропашных культур пестицидами, уменьшение их расхода, снижение загрязнения окружающей среды пестицидами.
Техническая задача достигается тем, что в беспилотном летательном аппарате для обработки пестицидами пропашных культур, содержащем корпус, соединенные с корпусом радиальные кронштейны, бесколлекторные двигатели, винты, аккумулятор, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией, полезной нагрузкой, технологический модуль полезной нагрузки, включающий блок для размещения и подачи рабочих жидкостей, блок регулирования и распределения потоков рабочей жидкости, секционную штангу, выполненную виде горизонтальных и ряда вертикальных секций с распылительными модулями, модуль датчиков внешней среды, модуль измерения высоты полета, датчики расстояния и определения поражения растений вредителями и болезнями согласно изобретению из ряда вертикальных секций, по крайней мере одна секция выполнена центральной, а на концах каждой из вертикальных секций смонтирован распылительный модуль, снабженный вертикальной дугообразной секцией с распылителями, выполненной в виде дуги эллипса, большая ось которого параллельна поверхности почвы, а малая ось совпадает с осью симметрии вертикальной секции, причем датчики расстояния и определения поражения растений вредителями и болезнями установлены перед дугообразной секцией по направлению полета БЛА на кронштейне, соединенном перпендикулярно с дугообразной секцией в точке пересечения дуги с малой осью эллипса, при этом распылители предпочтительно установлены на концах и в верхней части дугообразной секции, а гидравлический коллектор распылителей соединен линией связи с электромагнитными запорными клапанами блока распределения потоков рабочей жидкости, который в свою очередь соединен с блоком автоматического управления работой технологического модуля полезной нагрузки.
Изобретение поясняется чертежами.
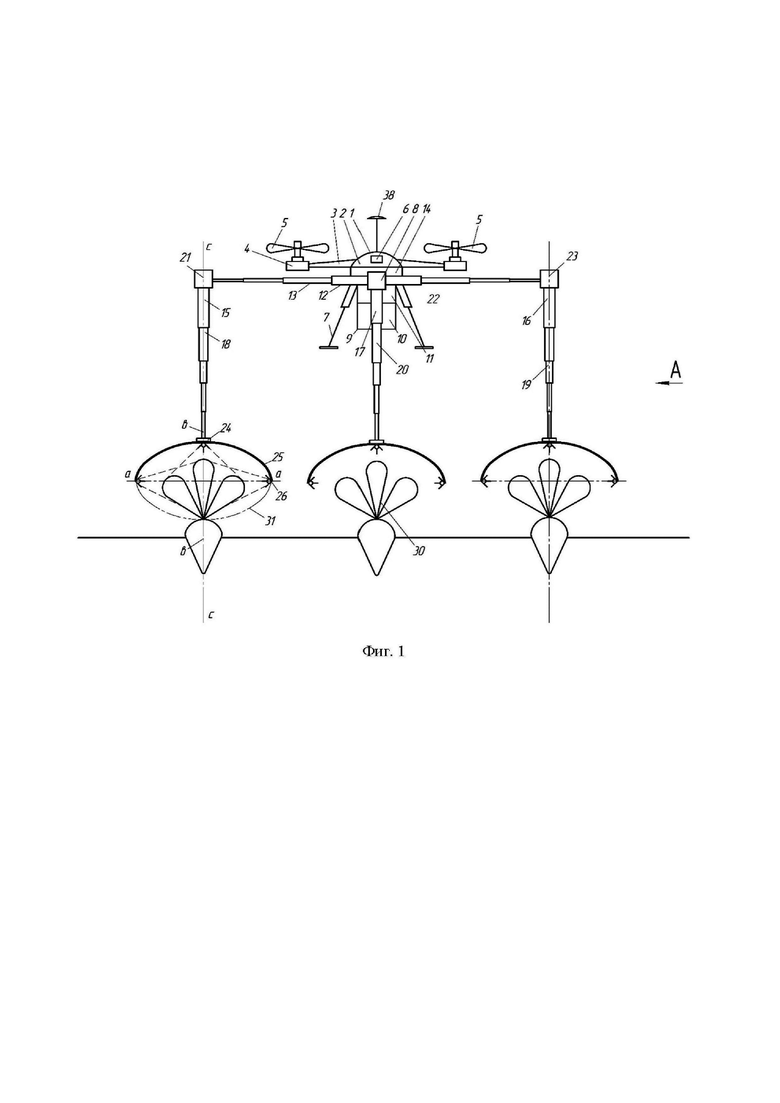
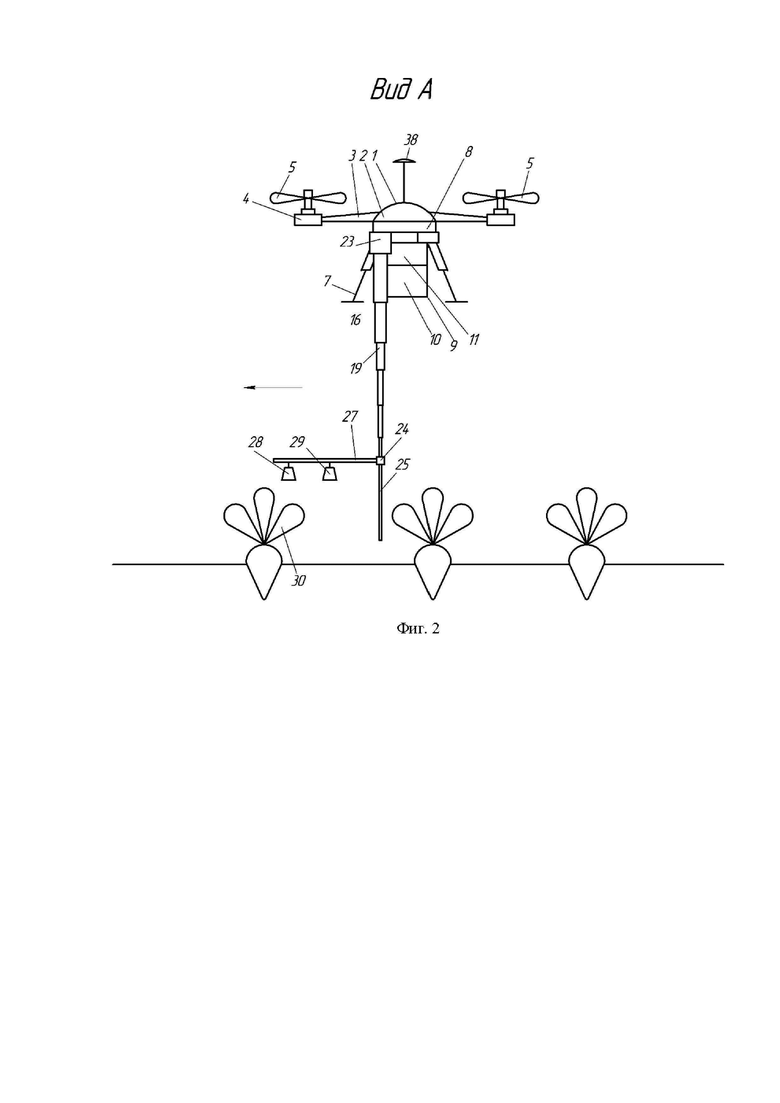
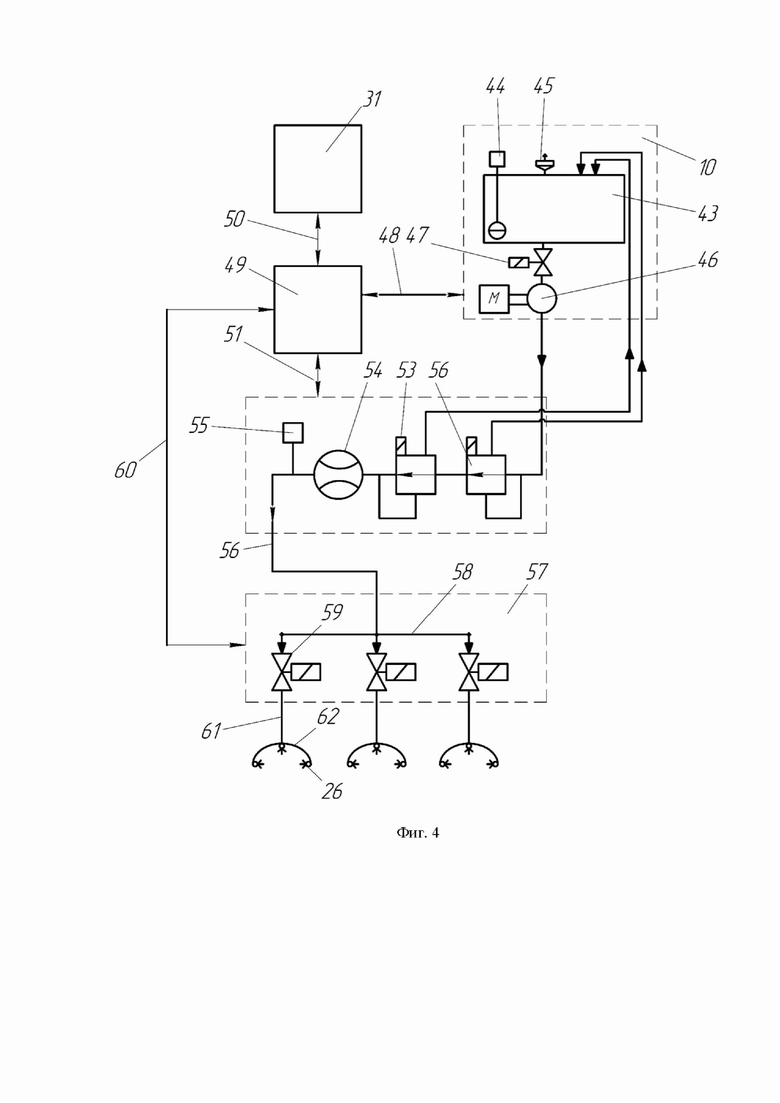
На фиг. 1 изображен беспилотный летательный аппарат для обработки пестицидами пропашных культур, вид сзади; на фиг. 2 то же, вид А; на фиг. 3 изображена функциональная блок-схема бортовой системы автоматического управления пилотированием, навигацией и полезной нагрузкой БЛА; на фиг. 4 изображена функциональная блок-схема размещения, регулирования, подачи и диспергирования рабочих жидкостей пестицидов БЛА.
Беспилотный летательный аппарат (БЛА) 1 для обработки пестицидами пропашных культур содержит корпус 2, соединенные с ним радиальные кронштейны 3, бесколлекторные двигатели 4, винты 5, аккумулятор 6, посадочное шасси 7, бортовую систему автоматического управления 8 пилотированием, навигацией и полезной нагрузкой, технологический модуль 9 полезной нагрузки, включающий блок 10 для размещения и подачи рабочих жидкостей, блок регулирования и распределения 11 потоков рабочей жидкости, модуль обработки растений, включающий секционную штангу с горизонтальными секциями 12 с телескопическими звеньями 13 и механизмом 14 выдвижения-втягивания звеньев 13, ряд вертикальных секций с крайними секциями 15, 16 и, по крайней мере, одной центральной вертикальной секцией 17 с телескопическими звеньями 18, 19, 20, соединенными механизмами выдвижения-втягивания 21, 22 и 23 с концами горизонтальной секции 12.
На конце каждой вертикальной секции 15, 16, 17 смонтирован распылительный модуль 24, снабженный дугообразной секцией 25 с распылителями 26, лежащей в плоскости, перпендикулярной направлению полета БЛА, и соединенный с секцией 25, перпендикулярно к секции 25 кронштейном 27, на котором установлены бесконтактные ультразвуковые датчики 28 определения высоты положения секции 25 над обрабатываемыми растениями с направлением осей ультразвуковых потоков на листовую поверхность растений и оптико-электронные датчики 29 определения поражения растений 30 вредителями и болезнями.
Дугообразная секция 25 выполнена в виде дуги эллипса 31, большая ось a-a которого параллельна поверхности почвы, а малая ось b-b совпадает с осью симметрии c-c вертикальной секции.
Распылители 26 предпочтительно установлены на концах и в верхней части дуги эллипса 31секции 25.
Установка распылительного модуля 24 на конце каждой вертикальной секции 15, 16, 17 в виде дугообразной секции 25 с распылителями 26 и сопряженного перпендикулярно к секции 25 по направлению полета кронштейна 27 с датчиками 28, 29 высоты положения секции 25 над обрабатываемыми растениями и определения поражения растений 30 вредителями и болезнями позволяет конкретизировать зону обработки БЛА пестицидами непосредственно по каждому ряду растений 30.
Установка в ряду вертикальных секций, по крайней мере, одной центральной вертикальной 17 секции с телескопическими звеньями 20 повышает производительность обработки пропашных культур БЛА.
Выполнение распылительного модуля в виде дуги эллипса 31, большая ось a-a которого параллельна поверхности почвы, а малая ось b-b совпадает с осью симметрии c-c вертикальной секции обеспечивает эквидистантное положение дугообразной секции относительно обрабатываемой вегетативной части растения 30.
Установка распылителей 26 предпочтительно на концах и в верхней части дуги эллипса 31 секции 25 обеспечивает обработку пестицидами абаксиальной и адаксиальной сторон листьев растений 30.
Бортовая система автоматического управления (САУ) 8 содержит полетный контроллер 31 с процессором, связанный с модулем 32 программного обеспечения управления полетом БЛА и модулем 33 программного обеспечения управления работой технологического модуля 9 полезной нагрузки, интегрированную навигационную систему 34, включающую модуль инерциальной навигационной системы 35, объединенный с модулем спутниковой навигационной системы 36 в виде приемника ГЛОНАСС 37 с антенной 38. Полетный контроллер 31 комплексирован с блоками автоматического управления исполнительными механизмами 39 двигателей 4, блоком 40 управления работой технологического модуля 9 полезной нагрузки, с модулями датчиков внешней среды 41и измерения высоты полета 42. Датчики 28, 29 соединены линией связи с контроллером 31.
Блок 10 для размещения и подачи рабочих жидкостей содержит бак 43 для рабочей жидкости пестицидов, оснащенный электронным уровнемером 44 и заправочной горловиной 45, насос 46 с электроприводом для создания давления и перемещения рабочей жидкости из бака 43 к блоку 11. Между баком 43 и насосом 46 установлен электрогидравлический нормально закрытый запорный клапан 47. Блок 10 соединен линией связи 48 с блоком 49 автоматического управления работой технологического модуля 9 полезной нагрузки, который в свою очередь соединен линией связи 50 с контроллером 18, а линией связи 51 - с блоком 11 регулирования подачи рабочей жидкости.
Блок 11 включает переливной электрогидравлический клапан 52 с пропорциональным управлением, пропорциональный редукционный клапан 53, регулирующий давление и расход рабочего потока в соответствии с опорными сигналами, поступающими от контроллера 31, электромагнитный расходомер 54, датчик давления жидкости 55. Блок 11 соединен гидролинией подачи 56 с блоком 57 распределения потоков рабочей жидкости. Блок 57 содержит распределительную гидролинию 58, к которой подключены электромагнитные запорные клапаны 59, связанные с распылителями 26 гидролиниями 60. Индукционные катушки электромагнитных запорных клапанов 59 подключены линией связи 60 к блоку 49. Выходные отверстия клапанов 59 соединены гидролиниями 61 с гидравлическим коллектором 62 распылителей 26.
Беспилотный летательный аппарат для обработки пестицидами пропашных культур работает следующим образом.
В процессор полетного контроллера 31 загружают полетное задание, в котором отображают в электронном виде параметры маршрута полета и электронную карту-задание, являющиеся программой дифференцированной обработки пестицидами пропашных культур в системе точного земледелия. Для обработки устанавливают границы, площадь, длину гона, координаты обрабатываемых элементарных участков, нормы внесения рабочих жидкостей пестицидов, координаты стартовой точки и координаты точки окончания обработки, рабочую скорость и высоту полета, траекторию полета, координаты посадочной площадки для заправки рабочими жидкостями и замены аккумуляторной батареи 6.
В бак 43 через заправочную горловину 45 с контролем уровня по уровнемеру 44 в соответствии с электронной картой - заданием заливают рабочую жидкость пестицида, например, инсектицида или фунгицида.
От котроллера 31 сигнал передаётся в блок системы автоматического управления полетом, запускаются двигатели 4, производится раскрутка несущих винтов 5 и двигатели 4 переводятся во взлетный режим. Контроллер 31 передает управляющие сигналы в блок 39, производится вертикальный взлет БЛА 1. Аппарат поднимается в воздух и, в соответствии с программой полета, подлетает к точке стартовых координат начала обработки, при этом координаты, определяемые интегрированной навигационной системой 34, сравниваются с заданными координатами, введенными в программу траекторного полета. Модуль 41 датчиков внешней среды передает информацию в микропроцессор контроллера 31 о параметрах внешней среды (скорости и направлении ветра, атмосферном давлении, температуре и влажности воздуха). Модуль 41 контролирует метеорологические параметры- скорость и направление ветра, температуру окружающей среды и передает значение параметров в контроллер 31.Модуль измерения высоты полета 42 передает на процессор контроллера 31 текущее значение высоты полета БЛА 1.
При подлете БЛА 1 к точке начала обработки по сигналу от контроллера 31, переданному в механизм 14, происходит выдвижение горизонтальных секций штанги 12 и установка вертикальных секций 15, 16, 17 в заданное рабочее положение. Бортовой контроллер 31 передает через блок 11 по линиям связи 48 и 51 управляющие сигналы, соответственно, в блоки 10 и 11. Клапан 47 открывается, включаются в работу насос 46 и клапаны 52, 53 устанавливается на заданный перепад давления рабочей жидкости.
Рабочая жидкость подается насосом 43 в клапан 52, который поддерживает заданное давление на входе рабочей жидкости в клапан 53 за счет байпасирования части потока жидкости в бак 43. Клапан 53 поддерживает выходное значение перепада рабочего давления на заданном уровне или меняет перепад давления на выходе в соответствии с электронной картой - заданием внесения пестицидов. От клапана 53 рабочая жидкость поступает в расходомер 54, который определяет текущее значение расхода и передает его по линии связи 51 в блок 49 и далее в контроллер 31. Датчик давления 55 измеряет текущее значение давления потока жидкости, которое по линии связи 51 передается в блок 49 и затем в контроллер 31. Контроллер 31 сравнивает текущие значения расхода и давления потока жидкости с заданными и, при необходимости, корректирует значение параметров потока подачей управляющих сигналов в блок 11по линии связи 50 через блок 49. Из блока 11 рабочая жидкость поступает в гидролинию групповой связи 58 блока 57 и далее к запорным клапанам 59. От контроллера 31 по линии связи 49 передается сигнал в блок 49 и далее по линии связи 60 в блок 57 на включение в работу клапанов 59. Клапаны 59 в соответствии с электронной картой - заданием, автоматически открываются на заданный расход рабочей жидкости, соответствующий заданной норме внесения, и рабочая жидкость пестицида диспергируется на обрабатываемые растения.
Заболевание растений, поражение их вредителями и болезнями в начальной стадии проявляются на отдельных растениях или локальных очагах. Дифференцированное внесение фунгицидов и инсектицидов с учетом неоднородности поражения растений как повышает эффективность защитных мероприятий, выполнимых БЛА, так и снижает экологическую нагрузку на окружающую среду.
В процессе полета БЛА 1 по заданной траектории при обработке пестицидами пропашных культур, ультразвуковые датчики расстояния 28 определяют высоту положения распылительного модуля 24 над растениями, далее передают информацию по линиям связи (не показано) в контроллер31, который сравнивает текущие значения расстояния с заданным расстоянием и при необходимости передает управляющее воздействие на механизм изменения высоты полета БЛА. В режиме on-line датчик 29 считывает информацию о характере и степени поражения вредителями или болезнями в каждом обрабатываем инсектицидами или фунгицидами ряде растений и передает данные о степени поражения вредителями или болезнями в контроллер 31. От контроллера по линии связи 49 передается сигнал блок 49 и далее по линии связи 60 передается команды в блок 57 на открытие или закрытие клапанов 59 в соответствии с тем наблюдается поражение растений вредителями или болезнями в каждом обрабатываем инсектицидами или фунгицидами ряде, или отсутствует.
В режиме of-line обработка пестицидами пропашных культур производится на основе предварительно разработанной карте - заданию распространения заболеваний и поражения вредителями растений обрабатываемого поля.
При выработке рабочей жидкости в баке 43, контролируемой уровнемером 45, сигнал от блока 49 поступает в контроллер 31, который посредством приемника 37 фиксирует координаты точки положения БЛА 1 на заданной траектории обработки пропашных культур. Контроллер 31 передает управляющие сигналы через блок 49 по линиям связи 47 и 60 на отключение насоса 46, закрытие клапана 47 и клапанов 59. САУ 8 направляет БЛА 1 к месту заправки рабочей жидкостью. Перед посадкой по сигналу от контроллера 31 посредством механизмов 21, 22, 23, осуществляется подъем вертикальных 15, 16, 17 штанги 12 и БЛА1 осуществляет посадку для заправки бака 43 рабочей жидкостью. После заправки БЛА 1 взлетает, контроллер 31 передает управляющий сигнал механизмам 21, 22, 23 на перевод вертикальных секций 15, 16, 17 в рабочее положение. САУ 8 возвращает БЛА 1 в точку прерванного полета и процесс внесения пестицидов продолжается.
Заявляемое устройство обеспечивает повышение производительности и качества обработки пестицидами пропашных культур, снижение расхода пестицидов и уменьшение загрязнения окружающей среды до предельно допустимых концентраций, повышение урожайности сельскохозяйственных культур за счет своевременной и точной обработки их пестицидами, минимизирует дрейф пестицидов в воздухе и, как следствие, их снос из зоны обработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2811604C1 |
| Беспилотный летательный аппарат для обработки пестицидами садовых деревьев и кустарников | 2023 |
|
RU2808292C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2808008C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| Робот-опрыскиватель для садоводства | 2022 |
|
RU2790688C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Машина для дифференцированного внесения пестицидов, жидких минеральных удобрений и других агрохимикатов | 2020 |
|
RU2748996C1 |

Изобретение относится к беспилотным летательным аппаратам (БПЛА), применяемым в сельском хозяйстве для обработки пестицидами деревьев, кустарников и других растений. БПЛА содержит корпус, кронштейны, двигатели, винты, аккумулятор, шасси, систему автоматического управления пилотированием, модуль полезной нагрузки, включающий блок для размещения и подачи рабочих жидкостей, блок регулирования и распределения потоков рабочей жидкости, секционную штангу, выполненную виде горизонтальных и вертикальных секций с распылительными модулями. БПЛА содержит датчики внешней среды, измерения высоты полета и датчики определения поражения растений. На концах каждой из вертикальных секций смонтирован распылительный модуль с вертикальной дугообразной секцией в виде эллипса. Большая ось эллипса параллельна поверхности почвы, а малая ось совпадает с осью симметрии вертикальной секции. Гидравлический коллектор распылителей соединен линией связи с электромагнитными запорными клапанами блока распределения потоков рабочей жидкости. Достигается повышение производительности и качества обработки пестицидами пропашных культур, снижение расхода пестицидов и уменьшение загрязнения окружающей среды, повышение урожайности сельскохозяйственных культур. 4 ил.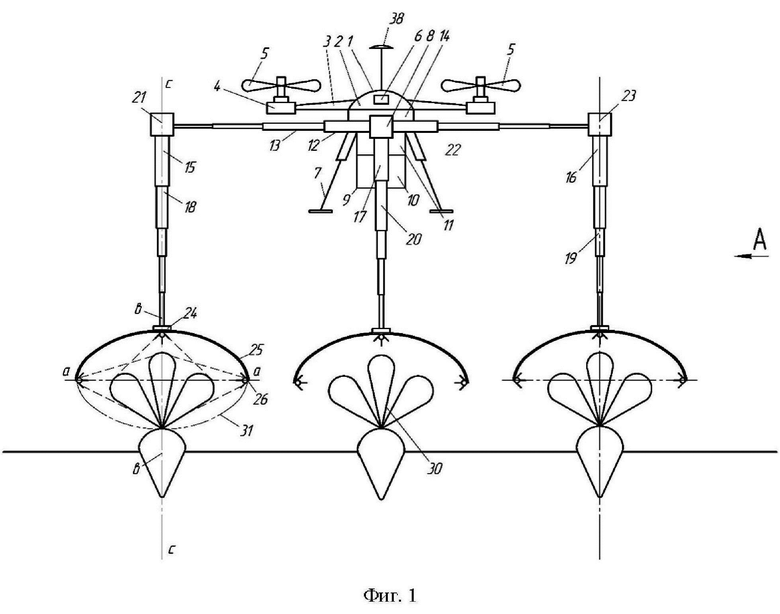
Беспилотный летательный аппарат для обработки пестицидами пропашных культур, содержащий корпус, соединенные с корпусом радиальные кронштейны, бесколлекторные двигатели, винты, аккумулятор, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией, полезной нагрузкой, технологический модуль полезной нагрузки, включающий блок для размещения и подачи рабочих жидкостей, блок регулирования и распределения потоков рабочей жидкости, секционную штангу, выполненную в виде горизонтальных и ряда вертикальных секций с распылительными модулями, модуль датчиков внешней среды, модуль измерения высоты полета, датчики расстояния и определения поражения растений вредителями и болезнями, отличающийся тем, что из ряда вертикальных секций, по крайней мере, одна секция выполнена центральной, а на концах каждой из вертикальных секций смонтирован распылительный модуль с вертикальной дугообразной секцией и распылителями, выполненной в виде дуги эллипса, большая ось которого параллельна поверхности почвы, а малая ось совпадает с осью симметрии вертикальной секции, причем датчики расстояния и определения поражения растений вредителями и болезнями установлены перед дугообразной секцией по направлению полета БЛА на кронштейне, соединенном перпендикулярно с дугообразной секцией в точке пересечения дуги с малой осью эллипса, при этом распылители предпочтительно установлены на концах и в верхней части дугообразной секции, а гидравлический коллектор распылителей соединен линией связи с электромагнитными запорными клапанами блока распределения потоков рабочей жидкости, который, в свою очередь, соединен с блоком автоматического управления работой технологического модуля полезной нагрузки.
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
| RU 179386 U1, 11.05.2018 | |||
| Беспилотный летающий опрыскиватель | 2022 |
|
RU2789929C1 |
| CN 218806566 U, 07.04.2023. | |||
