Изобретение относится к сельскохозяйственному машиностроению, а именно к машинам для уборки зерновых культур.
Известен сепаратор зернового вороха, включающий в себя: транспортную доску, вентилятор, жалюзийные решета и механизм привода (Зерноуборочные комбайны «Дон» / Ю.А. Песков, И.К. Мещеряков, Ю.Н. Ярмашев и др. - М.: Агропромиздат, 1986, - с. 54-58, рис. 55).
Недостатком данного сепаратора является невозможность автоматического изменения частоты вращения молотильного барабана и частоты вращения вентилятора в зависимости от фракционного состава зернового вороха во время работы зерноуборочного комбайна.
Известен способ управления загрузкой зерноуборочного комбайна и устройство для его осуществления, содержащее шнек жатки или подборщика с приводом, датчик давления к насосу и регулятор рабочего объема, устройство для контроля потерь зерна за зерноуборочным комбайном и регулятор его скорости, датчик и регулятор частоты вращения молотильного барабана, датчик и регулятор зазоров между молотильным барабаном и декой, блок управления (патент RU №2312485, опубл. 20.12.2007. Бюл. №35).
Недостатком данного устройства является отсутствие возможности изменения частоты вращения молотильного барабана и частоты вращения вентилятора сепаратора зернового вороха во время работы зерноуборочного комбайна.
Известна автоматическая система контроля, состоящая из блока индикации качества колосовой фракции, с усилителем-формирователем и пьезоэлектрическими датчиками качества колосовой фракции за нижним решетом очистки и домолачивающим устройством (патент RU №2266636, опубл. 27.12.2005. Бюл. №36).
Недостатком данной системы является отсутствие прямого воздействия системы на рабочие органы сепаратора зернового вороха во время работы зерноуборочного комбайна.
Известна автоматическая система контроля и управления частотой вращения вентилятора, состоящая из блока управления с задающим устройством, которые совместно контролируют и управляют частотой вращения вентилятора с помощью гидроцилиндра вариатора посредством гидрораспределителя с электромагнитным управлением и датчиком частоты вращения вентилятора, при этом значение фактической частоты вращения вентилятора поступает от датчика частоты вращения вентилятора на блок управления (патент RU №2544929, опубл. 20.03.2015 Бюл. №8).
Недостатком данной системы является отсутствие прямого воздействия системы на механизм привода молотильного барабана и рабочие органы сепаратора зернового вороха во время работы зерноуборочного комбайна.
За прототип выбрана автоматическая система контроля и управления настройками рабочих органов молотильно-сепарирующего устройства, состоящая из блока индикации качества колосовой фракции, усилителя-формирователя и пьезоэлектрических датчиков качества колосовой фракции за нижним решетом очистки и домолачивающим устройством, блока управления с задающим устройством, вентилятора, гидроцилиндра вариатора, гидрораспределителя с электромагнитным управлением, датчика частоты вращения вентилятора, второго задающего устройства, которое контролирует и управляет частотой вращения молотильного барабана с помощью гидроцилиндра вариатора молотильного барабана посредством гидрораспределителя молотильного барабана с электромагнитным управлением, датчика частоты вращения молотильного барабана (патент RU №2591133, опубл. 10.07.2016 Бюл. №19).
Недостатком данной системы является отсутствие прямого воздействия системы на механизм силового привода подбарабанья и рабочие органы сепаратора зернового вороха во время работы зерноуборочного комбайна.
Цель изобретения - автоматизация управления механизмом силового привода подбарабанья и рабочих органов молотильно-сепарирующего устройства.
Технический результат - автоматизация регулировки величины зазоров между молотильным барабаном и подбарабаньем зерноуборочного комбайна.
Технический результат достигается автоматической системой контроля и управления настройками рабочих органов молотильно-сепарирующего устройства, состоящей из блока индикации качества колосовой фракции, усилителя-формирователя и пьезоэлектрических датчиков качества колосовой фракции, блока управления с задающим устройством, вентилятора, гидроцилиндра вариатора вентилятора, гидрораспределителя вентилятора с электромагнитным управлением, датчика частоты вращения вентилятора, второго задающего устройства, которое контролирует и управляет частотой вращения молотильного барабана с помощью гидроцилиндра вариатора молотильного барабана посредством гидрораспределителя молотильного барабана с электромагнитным управлением, датчика частоты вращения молотильного барабана, при этом к системе дополнительно подключено третье задающее устройство, силовой привод подбарабанья, шток силового привода подбарабанья, подбарабанье, датчики положения подбарабанья, при этом третье задающее устройство выполнено в виде регулятора диапазона величины зазоров между молотильным барабаном и подбарабаньем, датчики положения подбарабанья выполнены в виде индуктивных датчиков и установлены на входе и на выходе подбарабанья; зазоры между молотильным барабаном и подбарабаньем изменяются в диапазоне, установленным на третьем задающем устройстве в зависимости от условий работы зерноуборочного комбайна.
За счет работы этой системы, автоматически регулируются зазоры между молотильным барабаном и подбарабаньем, а также изменяется частота вращения молотильного барабана и частота вращения вентилятора сепаратора зернового вороха, по сигналам, получаемым с датчиков качества колосовой фракции.
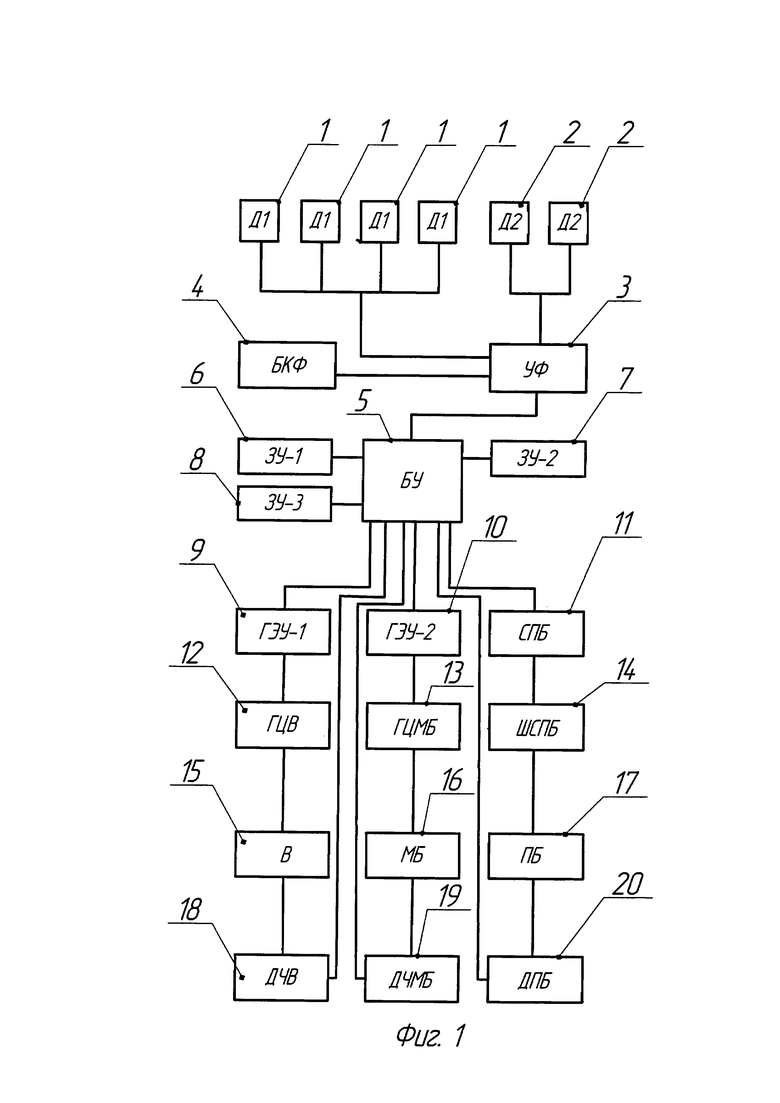
На фиг. 1 представлена схема автоматической системы контроля и управления настройками рабочих органов молотильно-сепарирующего устройства.
Автоматическая система контроля и управления настройками рабочих органов молотильно-сепарирующего устройства (см. фиг. 1) состоит из пьезоэлектрических датчиков качества колосовой фракции 1 (Д1) и 2 (Д2), усилителя-формирователя 3 (УФ), блока индикации качества колосовой фракции 4 (БКФ), блока управления 5 (БУ) с задающими устройствами 6 (ЗУ-1), 7 (ЗУ-2) и 8 (ЗУ-3), гидрораспределителей с электромагнитным управлением 9 (ГЭУ-1) и 10 (ГЭУ-2), силового привода подбарабанья 11 (СПБ), гидроцилиндра вариатора вентилятора 12 (ГЦВ) и гидроцилиндра вариатора молотильного барабана 13 (ГЦМБ), штока силового привода подбарабанья 14 (ШСПБ), вентилятора 15 (В), молотильного барабана 16 (МБ), подбарабанья 17 (ПБ), датчика частоты вращения вентилятора 18 (ДЧВ), датчика частоты вращения молотильного барабана 19 (ДЧМБ) и датчиков положения подбарабанья 20 (ДПБ).
Автоматическая система контроля и управления настройками рабочих органов молотильно-сепарирующего устройства работает следующим образом (фиг. 1). Сигналы от датчиков 1 (Д1) и 2 (Д2) подаются на усилитель-формирователь 3 (УФ) и на блок индикации качества колосовой фракции 4 (БКФ), затем на блок управления 5 (БУ), который управляет силовым приводом подбарабанья 11 (СПБ), изменяя зазоры между молотильным барабаном 16 (МБ) и подбарабаньем 17 (ПБ), которые устанавливаются оператором на задающем устройстве 8 (ЗУ-3) в зависимости от убираемой культуры и условий работы комбайна, а также БУ управляет электромагнитами гидрораспределителей 9 (ГЭУ-1) и 10 (ГЭУ-2), последние в свою очередь перемещают шток гидроцилиндра вариатора молотильного барабана 13 (ГЦМБ) и шток гидроцилиндра вариатора вентилятора 12 (ГЦВ), изменяя частоты вращения вентилятора 15 (В) и молотильного барабана 16 (МБ) в диапазонах, которые устанавливаются оператором на задающих устройствах 6 (ЗУ-1) и 7 (ЗУ-2) в зависимости от убираемой культуры и условий работы комбайна, при этом показания частот вращения передаются с датчика частоты вращения молотильного барабана 19 (ДЧМБ) и датчика частоты вращения вентилятора 18 (ДЧВ) на блок управления 5 (БУ), а фактические значения зазоров между молотильным барабаном 16 (МБ) й подбарабаньем 17 (ПБ) поступают от датчиков положения подбарабанья 20 (ДПБ) на блок управления 5 (БУ).
Таким образом, заявленная автоматическая система контроля и управления настройками рабочих органов молотильно-сепарирующего устройства, позволит автоматизировать регулировку величины зазоров между молотильным барабаном и подбарабаньем зерноуборочного комбайна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая система контроля и управления настройками рабочих органов молотильно-сепарирующего устройства | 2023 |
|
RU2800598C1 |
| Автоматическая система контроля и управления настройками рабочих органов молотильно-сепарирующего устройства | 2022 |
|
RU2781905C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ НАСТРОЙКАМИ РАБОЧИХ ОРГАНОВ МОЛОТИЛЬНО-СЕПАРИРУЮЩЕГО УСТРОЙСТВА | 2015 |
|
RU2591133C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ ВЕНТИЛЯТОРА | 2013 |
|
RU2544929C1 |
| Автоматическая система контроля и управления частотой вращения вентилятора зерноуборочного комбайна | 2022 |
|
RU2783603C1 |
| Автоматическая система контроля и управления ветро-решетной очистки зерноуборочного комбайна | 2024 |
|
RU2824794C1 |
| ДОМОЛАЧИВАЮЩЕЕ УСТРОЙСТВО КОЛОСОВОГО ВОРОХА | 2010 |
|
RU2425484C1 |
| СПОСОБ УБОРКИ ЗЕРНОВЫХ КУЛЬТУР С ОБМОЛОТОМ НА КОРНЮ И КОМБАЙН С ОЧЕСЫВАЮЩЕЙ ЖАТКОЙ | 2009 |
|
RU2402192C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОЛОТИЛЬНОГО АППАРАТА ЗЕРНОУБОРОЧНОГО КОМБАЙНА И ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2004 |
|
RU2349074C2 |
| Зерноуборочный комбайн с очесывающей жаткой | 2020 |
|
RU2744619C1 |
Изобретение относится к сельскохозяйственному машиностроению. Автоматическая система контроля и управления настройками рабочих органов молотильно-сепарирующего устройства состоит из блока индикации качества колосовой фракции, усилителя-формирователя и пьезоэлектрических датчиков качества колосовой фракции, блока управления с тремя задающими устройствами. Автоматическая система контроля и управления включает также вентилятор, гидроцилиндр вариатора вентилятора, гидрораспределитель вентилятора с электромагнитным управлением, датчик частоты вращения вентилятора и датчик частоты вращения молотильного барабана. Второе задающее устройство контролирует и управляет частотой вращения молотильного барабана с помощью гидроцилиндра вариатора молотильного барабана посредством гидрораспределителя молотильного барабана с электромагнитным управлением. Третье задающее устройство выполнено в виде регулятора диапазона величины зазоров между молотильным барабаном и подбарабаньем. Датчики положения подбарабанья выполнены в виде индуктивных датчиков и установлены на входе и на выходе подбарабанья. Автоматическая система обеспечивает регулирование величины зазоров между молотильным барабаном и подбарабаньем зерноуборочного комбайна. 1 з.п. ф-лы, 1 ил.
1. Автоматическая система контроля и управления настройками рабочих органов молотильно-сепарирующего устройства, состоящая из блока индикации качества колосовой фракции, усилителя-формирователя и пьезоэлектрических датчиков качества колосовой фракции, блока управления с задающим устройством, вентилятора, гидроцилиндра вариатора вентилятора, гидрораспределителя вентилятора с электромагнитным управлением, датчика частоты вращения вентилятора, второго задающего устройства, которое контролирует и управляет частотой вращения молотильного барабана с помощью гидроцилиндра вариатора молотильного барабана посредством гидрораспределителя молотильного барабана с электромагнитным управлением, датчика частоты вращения молотильного барабана, отличающаяся тем, что дополнительно подключено третье задающее устройство, силовой привод подбарабанья, шток силового привода подбарабанья, подбарабанье, датчики положения подбарабанья, при этом третье задающее устройство выполнено в виде регулятора диапазона величины зазоров между молотильным барабаном и подбарабаньем, датчики положения подбарабанья выполнены в виде индуктивных датчиков и установлены на входе и на выходе подбарабанья.
2. Автоматическая система по п. 1, отличающаяся тем, что зазоры между молотильным барабаном и подбарабаньем изменяются в диапазоне, установленном на третьем задающем устройстве в зависимости от условий работы зерноуборочного комбайна.
| АВТОМАТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ НАСТРОЙКАМИ РАБОЧИХ ОРГАНОВ МОЛОТИЛЬНО-СЕПАРИРУЮЩЕГО УСТРОЙСТВА | 2015 |
|
RU2591133C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ ВЕНТИЛЯТОРА | 2013 |
|
RU2544929C1 |
| Устройство для управления загрузкой самоходной уборочной машины | 1986 |
|
SU1384254A1 |
| Устройство для автоматического управления загрузкой самоходной уборочной машины | 1989 |
|
SU1743450A1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ДИАГНОСТИРОВАНИЯ | 2005 |
|
RU2300869C2 |

