/3f
f
гв
со
00 4
to сд
Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам автоматического регулирования загрузки самоходных убороч1гых машин.
Цель изобретения - повьшение качества управления путем введения приоритета ручного управления по отношег нию к автоматическому и снижение мощности реверсивного электродвигателя исполнительного механизма изменения загрузки.
электрической части устройства осуществляется от источника 27 питания. На корпусе 28 электродвигателя 15 исполнительного механизма закреплен рычаг 29, связанный механическим передаточным узлом 30 с рычагом 20 ручного управления загрузкой, и диск 31 тормоза. Корпус 28 установлен на подшипниках в опоре 32, а вал 33 этого электродвигателя через гибкую муфту 34 Соединен с органом управления блока 35 бесступенчатого изменения загрузки (изменения рабочей скоНа фиг. 1 изображена принципиальная схема автоматического устройства;15 рости).
на фиг. 2 - схема установки электро- Цепь 14 передачи сигналов на сни- двигателя исполнительного механизма
и соединения его с блоком бесступенчатого изменения рабочей скорости; на фиг. 3 - вид А на фиг. 2.
Устройство содержит комплект измерительных преобразователей 1-п по числу контролируемых рабрчих оргажение загрузки (рабочей скорости) соединена с источником питания 27 через размыкающий контакт 26 злектри- 20 ческого переключающего элемента 24 и путевой выключатель 19. Блок 3 питания процессора 2 подключен к источнику питания 27 через кнопочный
нов, процессор 2, в который входят блок 3 питания, микропроцессор 4, устройство 5 оперативной памяти, состоящее из оперативного запоминающег устройства 6 (ОЗУ) и программируемого запоминающего устройства 7, магистрали 8 связи, интерфейсные блоки 9 и 10 ввода и вьшода, устройства 11 и 12 ввода и вывода, С устройствами 12 вывода процессора 2 соединены электрическая цепь 1 3 передачи сиг налов на повьшение загрузки и электрическая цепь 14 на снижение загрузки, «к которым подключен реверсивньш электродвигатель 15 исполнительного механизма с необратимым редуктором. С валом электродвигателя 15 соединен рычаг 16. К цепям 13 и 14 через диоды 17 подключен электромагнитный тормоз 18 корпуса электродвигателя 15. На корпусе электродвигателя 15 установлен путевой выключатель 19. Он установлен так, что рычаг 16 осуществляет его выключение при нулевой загрузке (нулевой рабочей скорости) .
В системе имеется рычаг 20 ручного управления загрузкой.
К блоку 3 питания процессора 2 и электродвигателю 15 подключен механизм типа магнитного пускателя, в который входят кнопочные выключатели 21 и 22, кнопочный выключатель 23, электрический переключающий элемент 24 с замыкающимся 25 и раз.мы- кающимся 26 контактами. Питание
электрической части устройства осуществляется от источника 27 питания. На корпусе 28 электродвигателя 15 исполнительного механизма закреплен рычаг 29, связанный механическим передаточным узлом 30 с рычагом 20 ручного управления загрузкой, и диск 31 тормоза. Корпус 28 установлен на подшипниках в опоре 32, а вал 33 этого электродвигателя через гибкую муфту 34 Соединен с органом управления блока 35 бесступенчатого изменения загрузки (изменения рабочей скорости).
Цепь 14 передачи сигналов на сни-
5
0
жение загрузки (рабочей скорости) соединена с источником питания 27 через размыкающий контакт 26 злектри- 0 ческого переключающего элемента 24 и путевой выключатель 19. Блок 3 питания процессора 2 подключен к источнику питания 27 через кнопочный
выключатель 21 и замыкающийся контакт 25. Элемент 24 подключен к источнику питания 27 через кнопочньй выключатель 21 и кнопочньй включатель 23, а также параллельно - через кнопочный
выключатель 21, замыкающийся,- контакт 25, кнопочный выключатель 22. Электромагнитный тормоз 18 включен параллельно цепям 13 и 14 электродвигателя 15 через диоды 17.
Устройство работает следующим образом.
Для включения автоматической системы необходимо нажать кнопочный включатель 23. При этом срабатывает электрический переключающий элемент
24и блок 3 питания процессора 2 оказывается подключенным к источнику питания 27 через замыкающий контакт
25и кнопочный выключатель 21.
В моменты включения злектродвига- 5 теля 15 исполнительного механизма автоматической системы запитьшается . также электромагнит 18 тормоза корпуса 28 электродвигателя 15. Передача движения этого электродвигателя через корпус 28 в сторону рычага 20 ручного управления и движение вала 33 электродвигателя 15 полностью передается на блок 35 бесступенчатого изменения загрузки (рабочей ско- 5 рости) комбайна.
Для отключения автоматической системы и перехода на ручное управление достаточно нажать кнопочный выключатель 21 или 22.
5
0
0
При размыкании любого из кнопочных выключателей 21 и 22 отключается переключающий элемент 24. Блок 3 питания процессора 2 обесточивается, автоматическая система выключается. Одновременно подключается к источнику питания 27 одна из цепей 13 или 14 на изменение загрузки (рабочей скорости) комбайна. Если рычаг 20 ручного управления находится в положении, соответствующем нулевой загрузки, то включается цепь 14 исполнительного механизма. Начинается снижение загрузки, которое про- должается до тех пор, пока рычаг 29 на валу 33 электродвигателя 15 отпустит соответствующий контакт путевого выключателя 19,. что соответствует положению полного сброса заг- рузки (V 0). При любом другом положении рычаг 20 ручного управления загрузкой вал 33 электродвигателя 15 исполнительного механизма перемещает орган управления блока 35 изменения загрузки в положение, соответствующее положению органа 20 ручного управления. Поэтому при воздействии на конечный выключатель 21 или 22 автоматическая система оказывается отключенной и загрузка комбайна доводится до значения, соответствую- ,щего положению рычага 20. Система оказьшается готовой для управления вручную. При ручном управлении движе кие от рычага 20 передается корпусу 28, а затем через необратимый редуктор - валу 33 и далее через муфту 34 - блоку 35 изменения загрузки (рабочей скорости).
Формула изобретения
Устройство для управления загрузкой самоходной уборочной машины, со- держащее измерителы« 1е преобразователи загрузки рабочих органов, процессор с блоком питания и выходными электрическими цепями передачи сигналов на изменение загрузки, исполнительный механизм изменения загрузки с необратимым редуктором и реверсивным электродвигателем, соединенным с цепями передачи сигналов процессора, систему ручного управления загрузкой с рычагом ручного управления и механическим передаточным узлом и источник электропитания, о т л и ч а ю- щ е е с я тем, что, с целью повышения качества управления путем введения приоритета ручного управления по отношению к автоматическому, и снижения мощности реверсивного элект родвигателя исполнительного механизма изменения загрузки, корпус реверсивного электродвигателя установлен подвижно в радиальном направлении, соединен с механическим передаточным узлом системы ручного управления, снабжен электромагнитным тормозом, а устройство снабжено магнитным пус- кателем с одним нормально замкнутым и одним нормально разомкнутым контактами и путевым выключателем, на валу реверсивного электродвигателя установлен рычаг с возможностью взаимодействия с контактами путевого выключателя, при этом рычаг ручного управления загрузкой снабжен кнопочным выключателем с нормально замкнутым контактом, причем цепи передачи сигналов на изменение загрузки соединены с источником электропитания через нормально замкнутый контакт магнитного пускателя и путевой выключатель, блок питания процессора - через нормально разомкнутый контакт магнитного пускателя, кроме того, электромагнитный тормоз посредством диодов, установленных в прямой полярности, включен параллельно цепям передачи сигналов на изменение загрузки, а нормально замкнутый контакт кнопочного выключателя рычага ручного управления загрузкой включен последовательно в цепь питания блока питания процессора.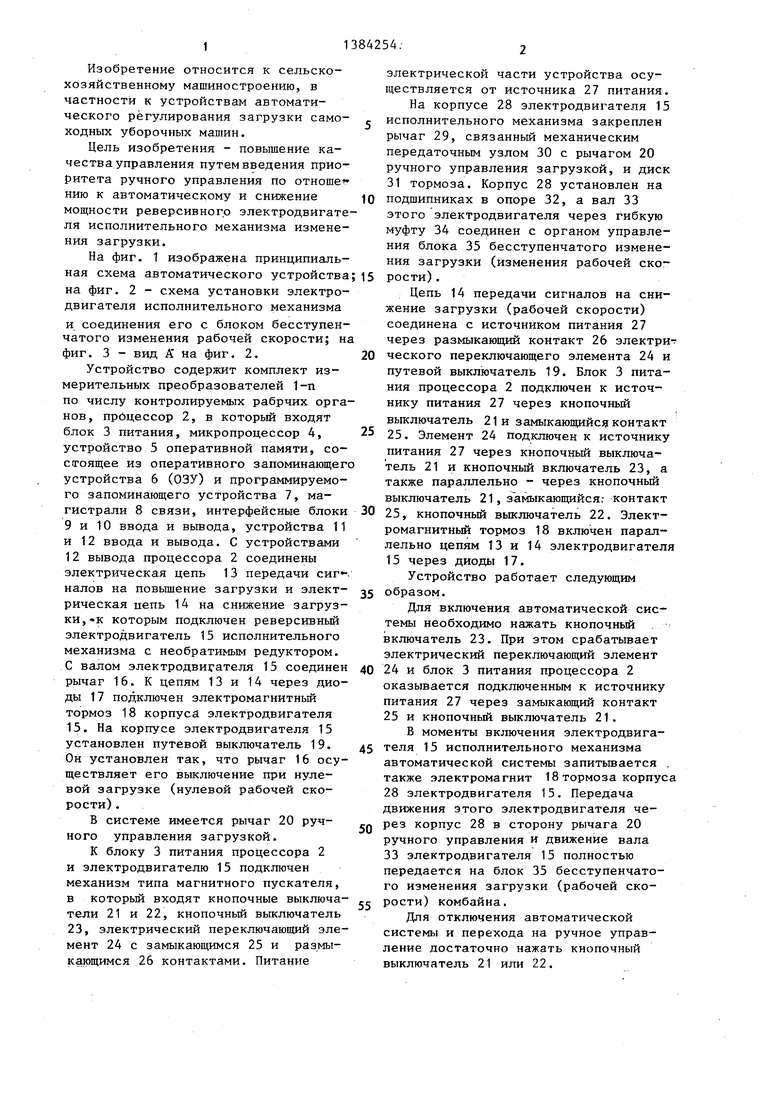

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления загрузкой самоходной уборочной машины | 1989 |
|
SU1743450A1 |
| ЭЛЕКТРОПРИВОД УСТРОЙСТВА ТРАНСПОРТИРОВКИ | 1991 |
|
RU2063343C1 |
| Устройство для управления шнекороторным экскаватором | 1988 |
|
SU1629417A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО СО СМЕННЫМ КУЗОВОМ ДЛЯ ПЕРЕВОЗКИ НАСЫПНЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ГРУЗОВ МАЛОЙ ПЛОТНОСТИ | 2011 |
|
RU2481998C1 |
| Электропривод роторного экскаватора | 1989 |
|
SU1710675A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И КОНТРОЛЯ ТЕМПЕРАТУРЫ ТЕПЛОНОСИТЕЛЯ СУШИЛКИ ЗЕРНА С ТЕПЛОГЕНЕРАТОРОМ, РАБОТАЮЩИМ НА ТВЕРДОМ ТОПЛИВЕ | 1996 |
|
RU2117227C1 |
| ТРЕНАЖЕР МЕХАНИКА-ВОДИТЕЛЯ | 2023 |
|
RU2828735C1 |
| Устройство для управления реверсивным электродвигателем строительного подъемника | 1983 |
|
SU1175848A1 |
| Устройство для управления реверсивным электродвигателем строительного подъемника | 1978 |
|
SU753760A1 |
| Металлорежущий станок | 1974 |
|
SU519315A1 |

Изобретение относится к сельскохозяйственному машиностроению. Цель изобретения - повышение качества управления путем введения приоритета ручного управления по отношению к автоматическому и снижен ие мощности реверсивного электродвигателя. Устройство содержит комплект измерительных преобразователей 1-п по числу контролируемых рабочих органов, процессор 2 и механизм регулирования загрузки. Последний имеет реверсивный электродвигатель 15, связанный с путевым выключателем, и электромагнитный тормоз 18. Кнопочньш выключатель 21 смонтирован на рычаге 20 ручного управления загрузкой и связан с контактами кнопочных выключателей 22 и 23 и источником питания 27. При воздействии на кнопочный выключатель 21 обесточивается блок 3 питания процессора 2. Осуществляется переход с автоматического на ручное управление. К источнику питания 27 подклю-- чается одна из цепей 13 и 14 через путевой выключатель 19. Реверсивньй электродвигатель 15 перемещает орган управления блока изменения загрузки в положение, соответствующее положению рычага 20 ручного управления загрузкой. 3 ил. (П
| Самоходный комбайн | 1979 |
|
SU818466A3 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
