Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления движением, осуществляемому посредством устройства управления движением, которое управляет движением транспортного средства, а также к устройству управления движением.
Уровень техники
[0002] Традиционно известна технология, которая включает в себя обнаружение позиции рассматриваемого транспортного средства на основе изображения, захваченного посредством камеры, и коррекцию обнаруженной позиции рассматриваемого транспортного средства на основе результата измерений, полученного с использованием глобальной системы позиционирования (GPS) (например, патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2014-115247A
Сущность изобретения
Задачи, решаемые изобретением
[0004] В вышеописанной традиционной технологии, значение измерения, полученное с использованием GPS, может значительно варьироваться в некоторых случаях, к примеру, когда GPS переключает спутники, и ошибочное определение может выполняться в отношении того, что полоса движения, в которой не движется фактически рассматриваемое транспортное средство, распознается в качестве полосы движения, в которой движется рассматриваемое транспортное средство.
Средство для решения задач
[0005] Настоящее изобретение разрешает вышеуказанную проблему посредством вывода первого результата определения в отношении того, включена или нет позиция рассматриваемого транспортного средства на основе позиционной информации, принимаемой посредством приемного устройства, в полосу движения, в которой движется рассматриваемое транспортное средство, вывода второго результата определения в отношении того, включена или нет позиция рассматриваемого транспортного средства, оцененная на основе результата обнаружения детектора для обнаружения состояния рассматриваемого транспортного средства, в полосу движения, в которой движется рассматриваемое транспортное средство, и оценку позиции рассматриваемого транспортного средства на основе результата обнаружения детектора, когда первый результат определения и второй результат определения не являются идентичными.
Преимущества изобретения
[0006] Настоящее изобретение может предоставлять способ управления, осуществляемый посредством устройства управления движением, которое может надлежащим образом оценивать позицию рассматриваемого транспортного средства.
Краткое описание чертежей
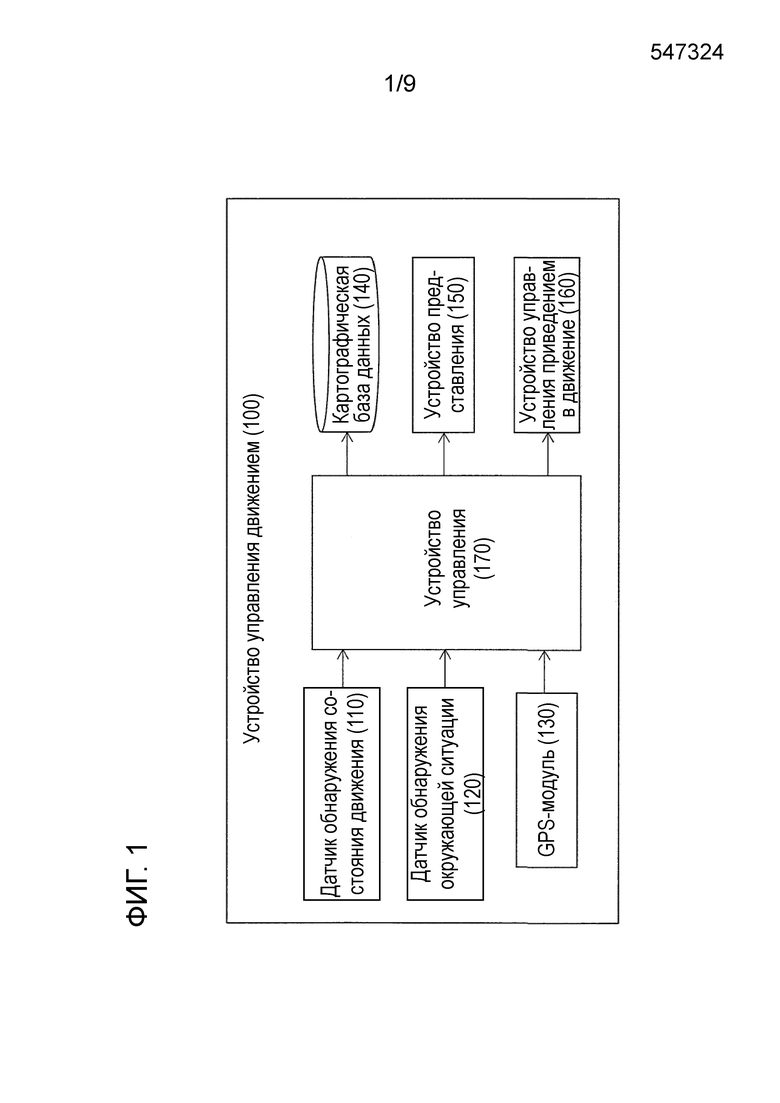
[0007] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства управления движением согласно одному или более вариантов осуществления настоящего изобретения.
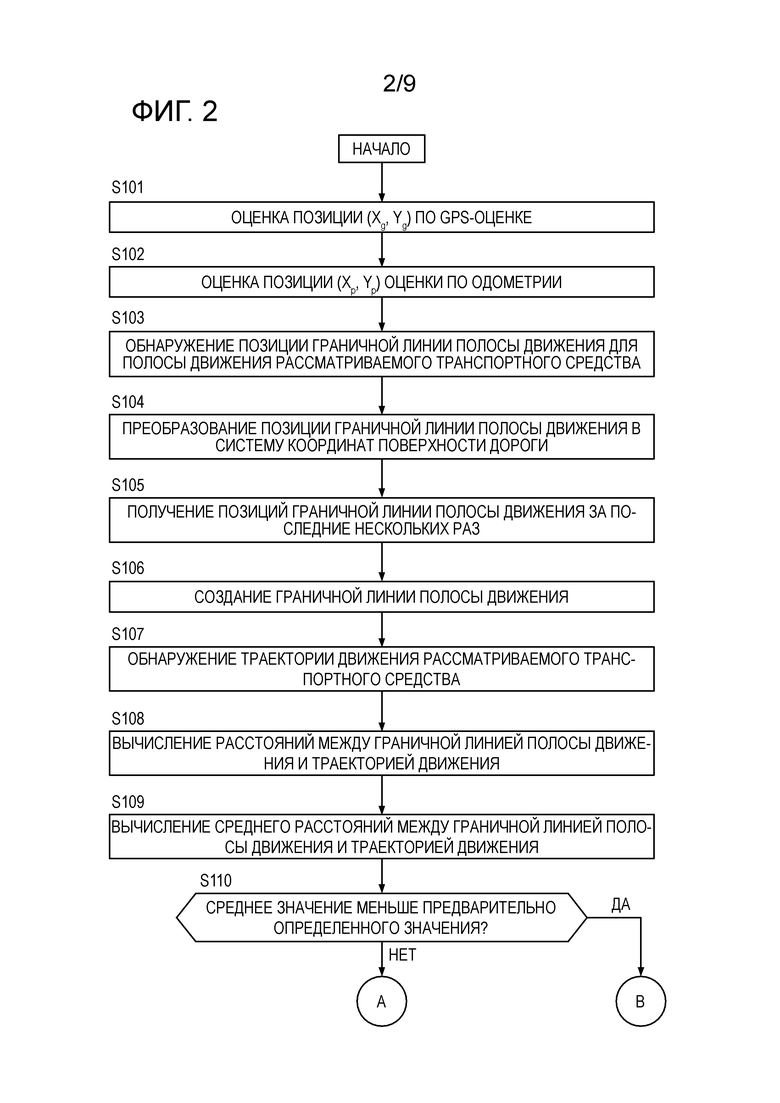
Фиг. 2 является блок-схемой последовательности операций способа (часть 1), иллюстрирующей процесс управления движением согласно первому варианту осуществления настоящего изобретения.
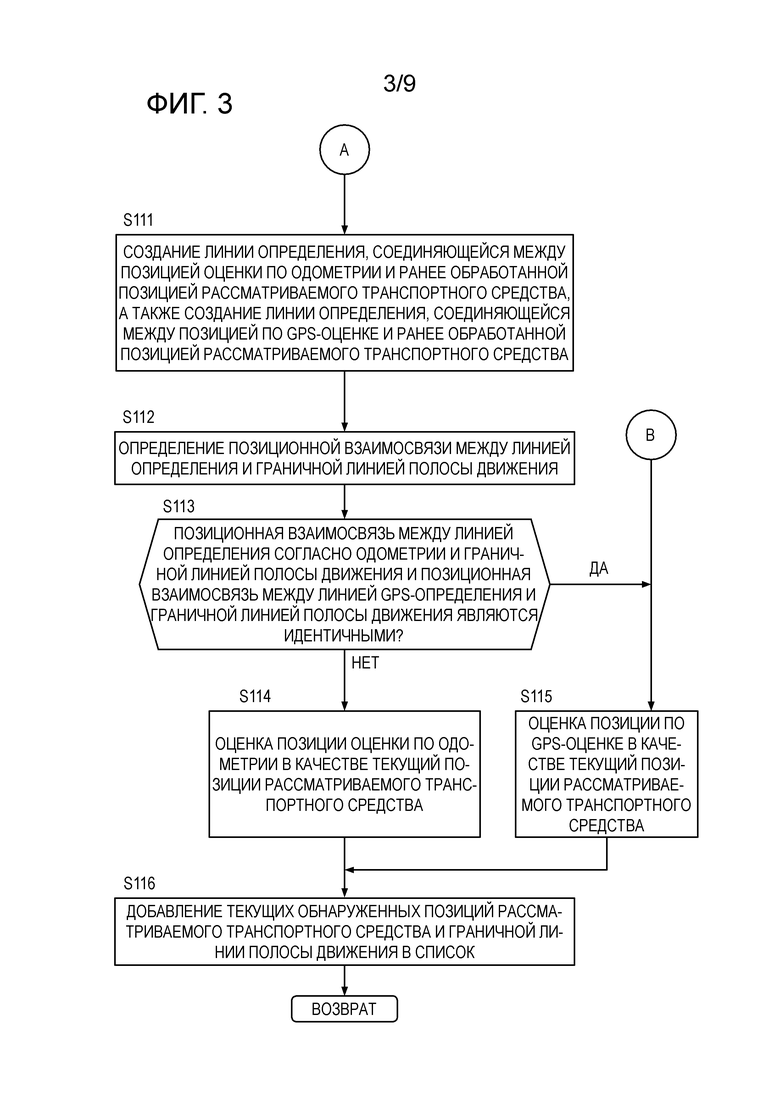
Фиг. 3 является блок-схемой последовательности операций способа (часть 2), иллюстрирующей процесс управления движением согласно первому варианту осуществления.
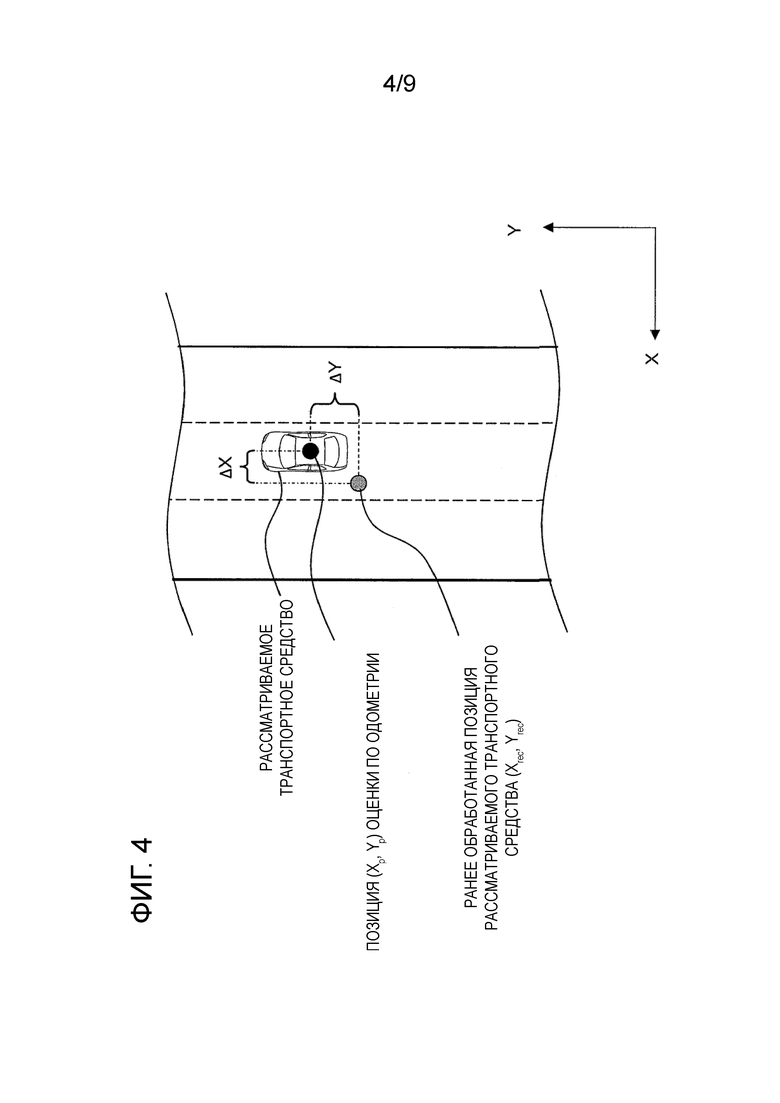
Фиг. 4 является видом для описания способа оценки позиции оценки по одометрии.
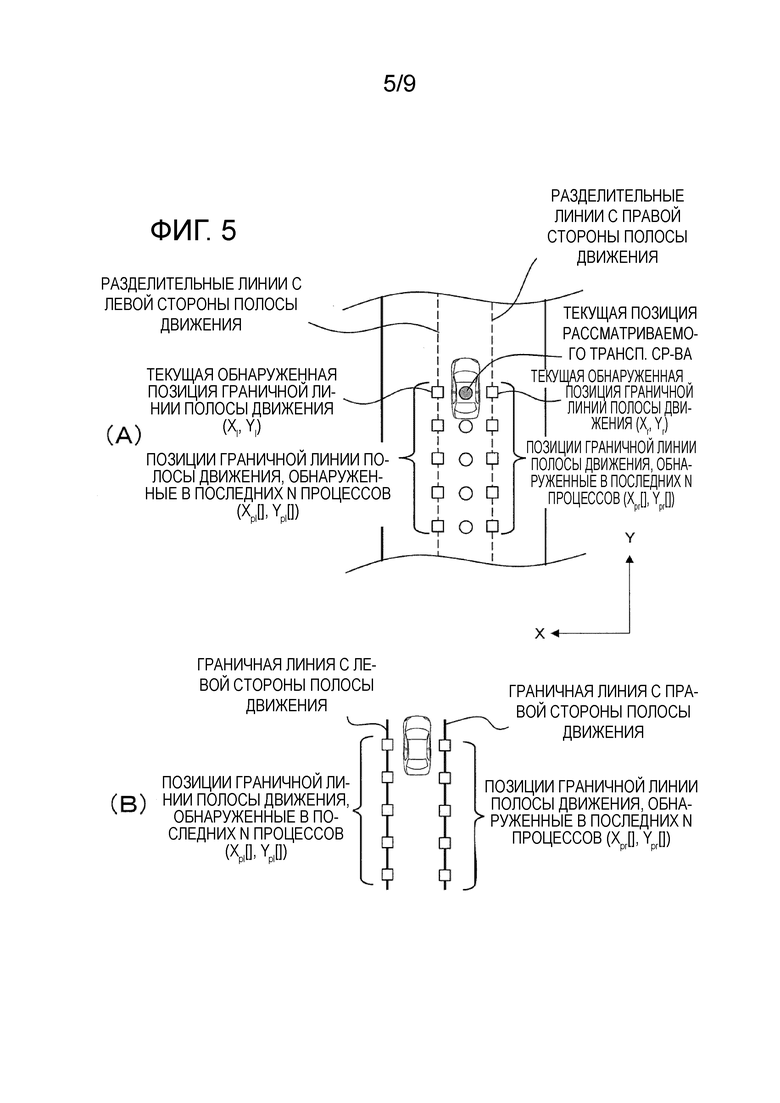
Фиг. 5 является набором видов для описания способа обнаружения граничных линий полосы движения.
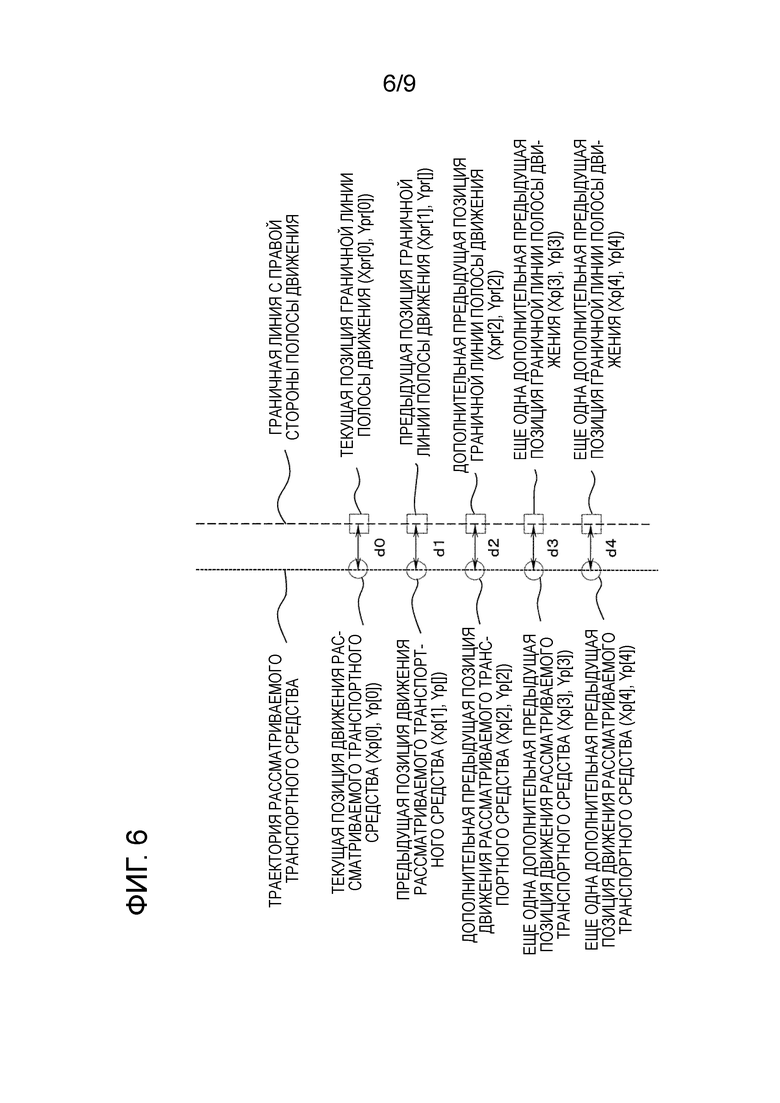
Фиг. 6 является видом для описания способа определения того, переезжает или нет рассматриваемое транспортное средство через граничную линию полосы движения.
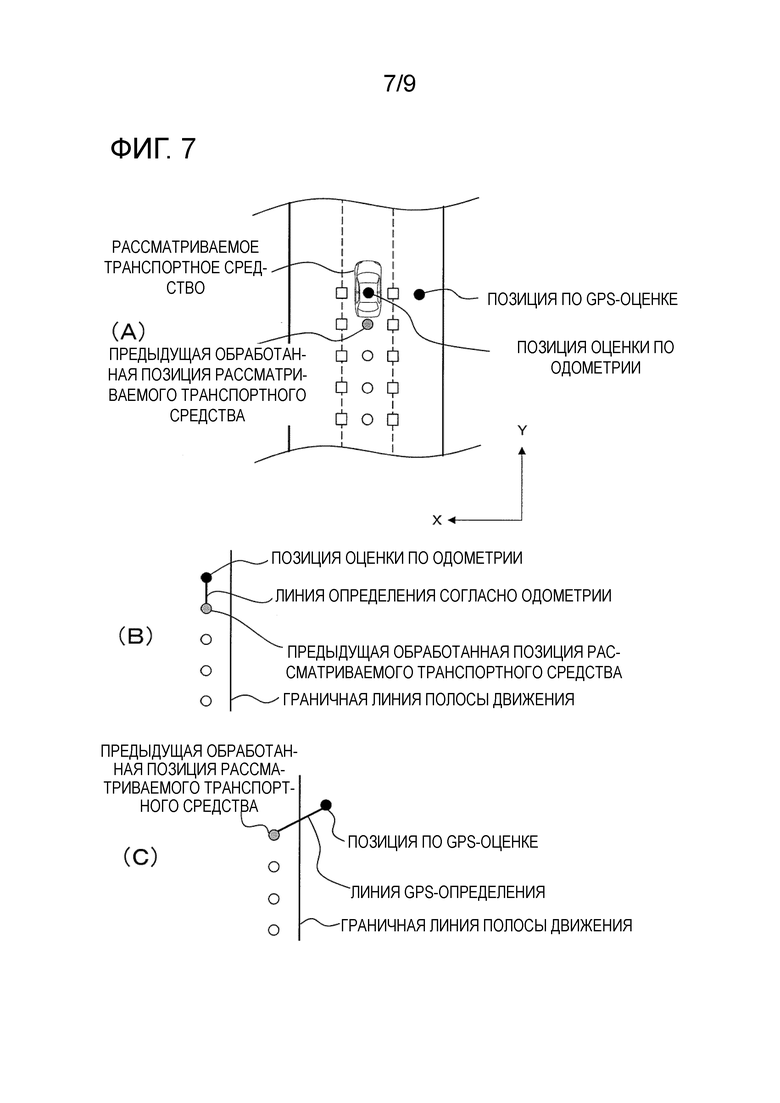
Фиг. 7 является набором видов для описания позиционных взаимосвязей между линиями определения и граничной линией полосы движения.
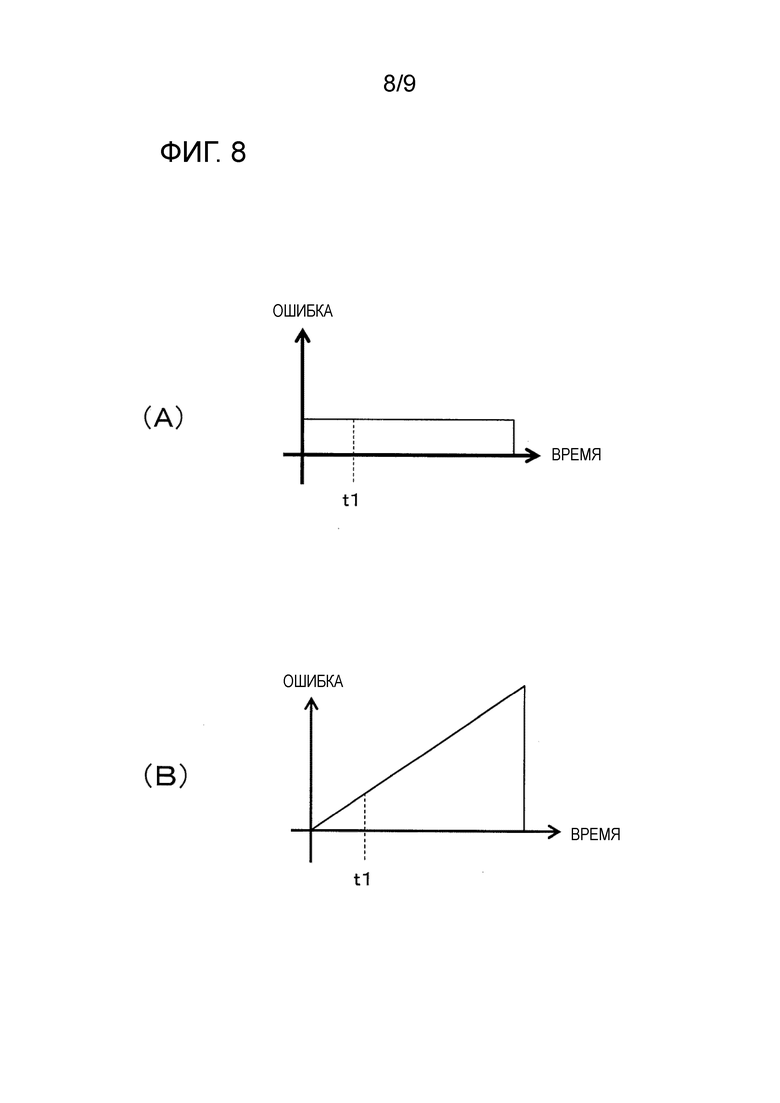
Фиг. 8 является набором видов, иллюстрирующих пример ошибки позиции рассматриваемого транспортного средства на основе результата обнаружения датчика обнаружения окружающей ситуации и пример ошибки позиции рассматриваемого транспортного средства на основе результата измерений GPS-модуля.
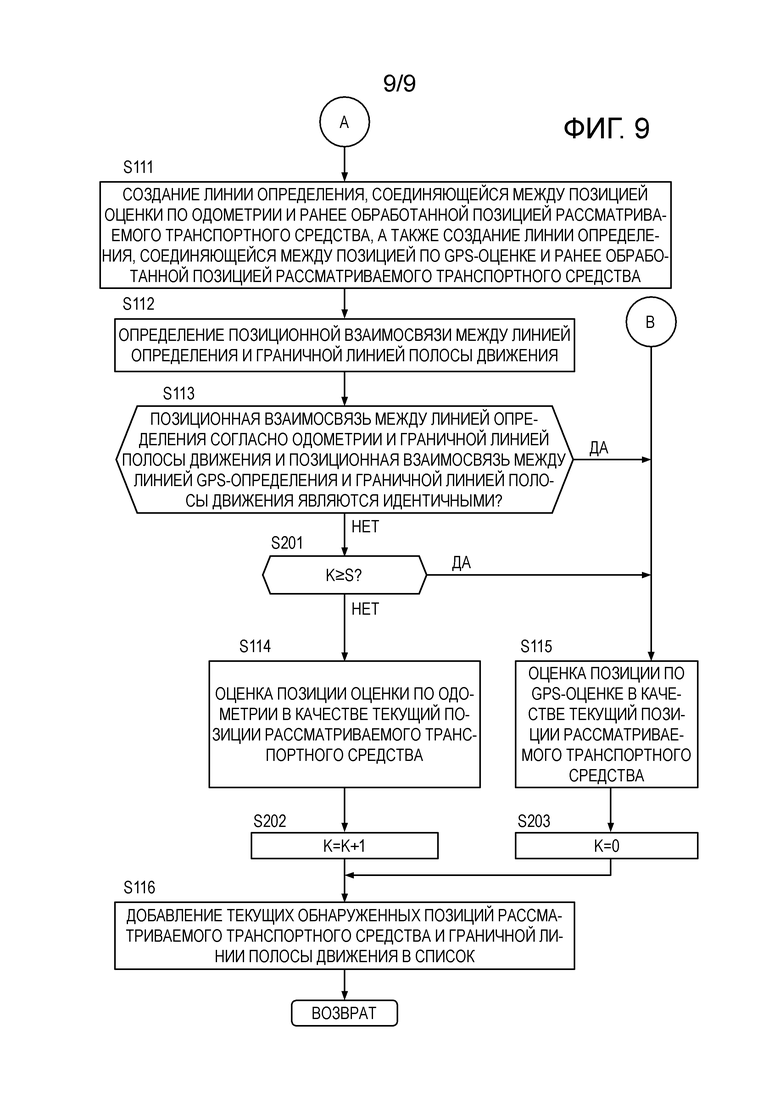
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно второму варианту осуществления настоящего изобретения.
Оптимальный режим осуществления изобретения
[0008] Далее описаны один или более вариантов осуществления настоящего изобретения со ссылками на чертежи. В вариантах осуществления, примерно иллюстрируется и описывается устройство управления движением, оборудованное в транспортном средстве.
[0009] Первый вариант осуществления
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства 100 управления движением согласно настоящему варианту осуществления. Как проиллюстрировано на фиг. 1, устройство 100 управления движением согласно настоящему варианту осуществления имеет датчик 110 обнаружения состояния движения, датчик 120 обнаружения окружающей ситуации, GPS-модуль 130, картографическую базу 140 данных, устройство 150 представления, устройство 160 управления приведением в движение и устройство 170 управления. Эти устройства соединяются посредством контроллерной сети (CAN), другой бортовой LAN и т.п. для взаимного обмена информацией.
[0010] Датчик 110 обнаружения состояния движения имеет датчик скорости транспортного средства, который определяет скорость транспортного средства для рассматриваемого транспортного средства, и гиродатчик, который определяет ускорение рассматриваемого транспортного средства. Датчик 110 обнаружения состояния движения определяет скорость транспортного средства для рассматриваемого транспортного средства с использованием датчика скорости транспортного средства и определяет ускорение и направление движения рассматриваемого транспортного средства с использованием гиродатчика. Информация по движению рассматриваемого транспортного средства, обнаруженная посредством датчика 110 обнаружения состояния движения, выводится в устройство 170 управления.
[0011] Датчик 120 обнаружения окружающей ситуации имеет, по меньшей мере, одно из камеры переднего вида, которая захватывает изображения впереди рассматриваемого транспортного средства, камеры заднего вида, которая захватывает изображения позади рассматриваемого транспортного средства, переднего радара, который обнаруживает помехи впереди рассматриваемого транспортного средства, заднего радара, который обнаруживает помехи позади рассматриваемого транспортного средства, и боковые радары, которые обнаруживают помехи, существующие по бокам от рассматриваемого транспортного средства. Датчик 120 обнаружения окружающей ситуации обнаруживает информацию окружения, которая представляет ситуацию рядом с рассматриваемым транспортным средством. Информация окружения рассматриваемого транспортного средства, обнаруженная посредством датчика 120 обнаружения окружающей ситуации, выводится в устройство 170 управления.
[0012] GPS-модуль 130 обнаруживает радиоволны, передаваемые из множества спутников связи, чтобы периодически получать позиционную информацию рассматриваемого транспортного средства. Позиционная информация рассматриваемого транспортного средства, обнаруженная посредством GPS-модуля 130, выводится в устройство 170 управления.
[0013] Картографическая база 140 данных сохраняет картографическую информацию, включающую в себя информацию дороги. Информация дороги включает в себя информацию относительно полос движения каждой дороги.
[0014] Устройство 150 представления, например, представляет собой такое устройство, как дисплей навигационного устройства, дисплей, включенный в зеркало заднего вида, дисплей, включенный в приборный блок, дисплей на лобовом стекле, проецируемый на ветровое стекло, и динамик аудиоустройства. Устройство 150 представления представляет некоторую информацию представления водителю под управлением посредством устройства 170 управления.
[0015] Устройство 160 управления приведением в движение управляет движением рассматриваемого транспортного средства. Например, когда рассматриваемое транспортное средство едет за движущимся впереди транспортным средством, устройство 160 управления приведением в движение управляет работой приводного механизма (которая включает в себя работу двигателя внутреннего сгорания в случае автомобиля с двигателем и работу электромотора в случае электромобиля и дополнительно включает в себя распределение крутящего момента между двигателем внутреннего сгорания и электромотором в случае гибридного автомобиля) и операцией торможения, чтобы достигать ускорения, замедления и скорости транспортного средства таким образом, что расстояние между рассматриваемым транспортным средством и движущимся впереди транспортным средством поддерживается равным постоянному расстоянию. Когда рассматриваемое транспортное средство выполняет смену полосы движения и/или правый поворот или левый поворот, устройство 160 управления приведением в движение управляет работой актуатора рулевого управления, чтобы управлять работой колес, и в силу этого выполняет управление при повороте рассматриваемого транспортного средства. Устройство 160 управления приведением в движение управляет движением рассматриваемого транспортного средства в соответствии с командами из устройства 170 управления, которое описывается ниже. Другие известные способы также могут использоваться в качестве способа управления движением, осуществляемого посредством устройства 160 управления приведением в движение.
[0016] Устройство 170 управления включает в себя постоянное запоминающее устройство (ROM), которое сохраняет программы для управления движением рассматриваемого транспортного средства, центральный процессор (CPU), который выполняет программы, сохраненные в ROM, и оперативное запоминающее устройство(RAM), которое служит в качестве доступного устройства хранения данных. В качестве замены или в дополнение к CPU, также может использоваться микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) и т.п. в качестве функциональной схемы.
[0017] Устройство 170 управления выполняет программы, сохраненные в ROM, с использованием CPU, чтобы за счет этого выполнять функцию оценки позиции по GPS для оценки позиции рассматриваемого транспортного средства на основе результата измерений GPS-модуля 130, функцию оценки позиции по одометрии для оценки позиции рассматриваемого транспортного средства на основе результата обнаружения датчика 110 обнаружения состояния движения, функцию обнаружения граничных линий для обнаружения граничных линий полосы движения, в которой движется рассматриваемое транспортное средство, функцию оценки позиции рассматриваемого транспортного средства для оценки позиции рассматриваемого транспортного средства и функцию определения позиции рассматриваемого транспортного средства для определения позиции рассматриваемого транспортного средства на основе результата оценки. Ниже описывается каждая функция устройства 170 управления.
[0018] Устройство 170 управления выполняет функцию оценки позиции по GPS, чтобы оценивать позицию рассматриваемого транспортного средства на основе результата измерений GPS-модуля 130. Устройство 170 управления корректирует позиционную информацию рассматриваемого транспортного средства, полученную посредством GPS-модуля 130, на основе информации варьирования угла, полученной из гиродатчика, и скорости транспортного средства, полученной из датчика скорости транспортного средства. В нижеприведенном описании, позиция рассматриваемого транспортного средства, оцененная с использованием функции оценки позиции по GPS, упоминается как "позиция по GPS-оценке".
[0019] Устройство 170 управления выполняет функцию оценки позиции по одометрии, чтобы оценивать позицию рассматриваемого транспортного средства на основе результата обнаружения датчика 110 обнаружения состояния движения. Например, устройство 170 управления вычисляет величину варьирования позиции рассматриваемого транспортного средства на основе скорости транспортного средства, определенной посредством датчика скорости транспортного средства, и ускорения и угловой скорости, определенных посредством гиродатчика. Затем устройство 170 управления оценивает текущую позицию рассматриваемого транспортного средства посредством суммирования текущей вычисленной величины варьирования позиции рассматриваемого транспортного средства с ранее оцененной позицией рассматриваемого транспортного средства. В нижеприведенном описании, позиция рассматриваемого транспортного средства, оцененная с использованием функции оценки позиции по одометрии, упоминается как "позиция оценки по одометрии".
[0020] Устройство 170 управления выполняет функцию обнаружения граничных линий, чтобы обнаруживать граничные линии полосы движения, в которой движется рассматриваемое транспортное средство (в дальнейшем эта полоса движения также упоминается как "полоса движения рассматриваемого транспортного средства"), в качестве граничных линий полосы движения. Например, устройство 170 управления обнаруживает разделительные линии полосы движения, в которой движется рассматриваемое транспортное средство, и граничные линии между обочинами дороги и полосы движения, в которой движется рассматриваемое транспортное средство, в качестве граничных линий полосы движения на основе данных изображений, захваченных посредством камеры переднего вида и/или камеры заднего вида, которые составляют датчик 120 обнаружения окружающей ситуации, или результата обнаружения, обнаруженного посредством переднего радара, заднего радара или боковых радаров, которые также составляют датчик 120 обнаружения окружающей ситуации. Ниже описываются подробности способа обнаружения граничных линий полосы движения с использованием функции обнаружения граничных линий.
[0021] Устройство 170 управления выполняет функцию оценки позиции рассматриваемого транспортного средства, чтобы оценивать позицию рассматриваемого транспортного средства на основе позиции по GPS-оценке, оцененной с использованием функции оценки позиции по GPS, и позиции оценки по одометрии, оцененной с использованием функции оценки позиции по одометрии. Ниже также описывается способ оценки позиции рассматриваемого транспортного средства с использованием функции оценки позиции рассматриваемого транспортного средства.
[0022] Устройство 170 управления выполняет функцию определения позиции рассматриваемого транспортного средства, чтобы определять позицию рассматриваемого транспортного средства на основе результата оценки, полученного с использованием функции оценки позиции рассматриваемого транспортного средства. Ниже также описывается способ определения позиции рассматриваемого транспортного средства с использованием функции определения позиции рассматриваемого транспортного средства.
[0023] Ниже описывается процесс управления движением согласно первому варианту осуществления со ссылкой на фиг. 2 и фиг. 3. Фиг. 2 и фиг. 3 являются блок-схемами последовательности операций способа, иллюстрирующими процесс управления движением согласно первому варианту осуществления. Процесс управления движением, описанный ниже, выполняется посредством устройства 170 управления.
[0024] На этапе S101, функция оценки позиции по GPS выполняется для того, чтобы оценивать текущую позицию рассматриваемого транспортного средства в качестве позиции по GPS-оценке на основе результата измерений GPS-модуля 130.
[0025] На этапе S102, функция оценки позиции по одометрии выполняется для того, чтобы оценивать текущую позицию рассматриваемого транспортного средства в качестве позиции оценки по одометрии на основе результата обнаружения датчика 110 обнаружения состояния движения. Например, как проиллюстрировано на фиг. 4, функция оценки позиции по одометрии выполняется для того, чтобы вычислять величину (Δx, Δy, Δθ) варьирования позиции рассматриваемого транспортного средства со времени предыдущего процесса на основе результата обнаружения датчика 110 обнаружения состояния движения. Функция оценки позиции по одометрии также выполняется для того, чтобы получать позиционную информацию (Xrec, Yrec) рассматриваемого транспортного средства во время предыдущего процесса из запоминающего устройства для устройства 170 управления, как проиллюстрировано на фиг. 4. Функция оценки позиции по одометрии затем выполняется для того, чтобы оценивать текущую позицию (Xp, Yp) рассматриваемого транспортного средства в качестве позиции оценки по одометрии на основе позиционной информации (Xrec, Yrec) рассматриваемого транспортного средства во время предыдущего процесса и величины (Δx, Δy, Δθ) варьирования позиции рассматриваемого транспортного средства из предыдущего процесса в соответствии со следующими уравнениями (1) и (2). Фиг. 4 является видом для описания способа оценки позиции оценки по одометрии.
Xp= Xrec+Δx... (1)
Yp= Yrec+Δy... (2)
[0026] На этапе S103, функция обнаружения граничных линий выполняется для того, чтобы обнаруживать позиции граничных линий полосы движения для полосы движения (полосы движения рассматриваемого транспортного средства), в которой движется рассматриваемое транспортное средство. Например, функция обнаружения граничных линий выполняется для того, чтобы получать информацию изображений рядом с рассматриваемым транспортным средством и/или результаты обнаружения из датчика 120 обнаружения окружающей ситуации и обнаруживать позиции разделительных линий в правой и левой сторонах рассматриваемого транспортного средства или позиции граничных линий полосы движения между дорогой и обочинами дороги. Фиг. 5 иллюстрирует окружение, в котором разделительные линии существуют в правой и левой сторонах рассматриваемого транспортного средства. Например, функция обнаружения граничных линий выполняется для того, чтобы обнаруживать позиции (Xl, Yl) и (Xr, Yr) на разделительных линиях по бокам от рассматриваемого транспортного средства, как проиллюстрировано на фиг. 5. Здесь, Xl и Yl представляют позицию разделительной линии в левой стороне рассматриваемого транспортного средства, и Xr и Yr представляют позицию разделительной линии в правой стороне рассматриваемого транспортного средства.
[0027] На этапе S104, функция обнаружения граничных линий выполняется для того, чтобы преобразовывать позиции граничных линий полосы движения, обнаруженные на этапе S103, из системы координат транспортного средства в систему координат поверхности дороги. Это описывается подробнее. Набор позиций (Xl, Yl, Xr, Yr) граничных линий полосы движения, обнаруженных на этапе S103, позиционируется в системе координат транспортного средства с позицией транспортного средства (камеры) в качестве начальной координаты. На этапе S104, этот набор позиций (Xl, Yl, Xr, Yr) преобразуется из системы координат транспортного средства, в которой текущая позиция рассматриваемого транспортного средства является начальной координатой (0, 0), в систему координат поверхности дороги, в которой текущая позиция рассматриваемого транспортного средства выражается как (Xp, Yp). В нижеприведенном описании, (Xl_r, Yl_r, Xr_r, Yr_r) представляет набор позиций, полученных посредством изменения набора позиций (Xl, Yl, Xr, Yr) граничных линий полосы движения в системе координат транспортного средства в систему координат поверхности дороги.
[0028] Набор позиций (Xl_r, Yl_r, Xr_r, Yr_r) граничных линий полосы движения, преобразованных в систему координат поверхности дороги на этапе S104, добавляется в список позиций граничных линий полосы движения, сохраненных в запоминающем устройстве устройства 170 управления. В этом списке, регистрируются несколько наборов позиций (Xl_r, Yl_r, Xr_r, Yr_r) граничных линий полосы движения, обнаруженных в последних n процессов (включающих в себя текущий процесс). В нижеприведенном описании, (Xpl[], Ypl[], Xpr[], Ypr[]) представляет наборы позиций граничных линий полосы движения, которые регистрируются в списке за последние n раз.
[0029] На этапе S105, функция обнаружения граничных линий выполняется для того, чтобы получать наборы позиций (Xpl[], Ypl[], Xpr[], Ypr[]) граничных линий полосы движения, обнаруженных в последних n процессов. Как описано выше, функция обнаружения граничных линий может выполняться для того, чтобы обращаться к списку позиций граничных линий полосы движения, сохраненных в запоминающем устройстве устройства 170 управления, чтобы за счет этого получать наборы позиций (Xpl[], Ypl[], Xpr[], Ypr[]) граничных линий полосы движения, обнаруженных в последних n процессов.
[0030] На этапе S106, функция обнаружения граничных линий выполняется для того, чтобы обнаруживать граничные линии полосы движения для полосы движения рассматриваемого транспортного средства на основе наборов позиций (Xpl[], Ypl[], Xpr[], Ypr[]) граничных линий полосы движения, полученных на этапе S105 за последние n раз. Например, функция обнаружения граничных линий может использоваться для того, чтобы вычислять регрессионные кривые из наборов позиций (Xpl[], Ypl[], Xpr[], Ypr[]) граничных линий полосы движения за последние n раз, чтобы за счет этого обнаруживать вычисленные регрессионные кривые в качестве граничных линий полосы движения для полосы движения рассматриваемого транспортного средства. Функция обнаружения граничных линий также выполняется для того, чтобы обнаруживать граничную линию с левой стороны полосы движения из позиций граничной линии с левой стороны полосы движения и обнаруживать граничную линию с правой стороны полосы движения из позиций граничной линии с правой стороны полосы движения.
[0031] На этапе S107, функция оценки позиции рассматриваемого транспортного средства выполняется для того, чтобы обнаруживать траекторию движения рассматриваемого транспортного средства. В настоящем варианте осуществления, аналогично наборам позиций граничных линий полосы движения, позиции (Xp, Yp) рассматриваемого транспортного средства, обнаруженные в последних n процессов, также сохраняются в качестве списка в запоминающем устройстве устройства 170 управления. Функция оценки позиции рассматриваемого транспортного средства может использоваться для того, чтобы обращаться к списку позиций рассматриваемого транспортного средства, чтобы вычислять регрессионную кривую из позиций рассматриваемого транспортного средства, обнаруженных в последних n процессов, за счет этого обнаруживая вычисленную регрессионную кривую в качестве траектории движения рассматриваемого транспортного средства. В нижеприведенном описании, (Xp[], Yp[]) представляет позиции рассматриваемого транспортного средства за последние n раз.
[0032] На этапе S108, функция оценки позиции рассматриваемого транспортного средства выполняется для того, чтобы вычислять расстояния от граничных линий полосы движения для полосы движения рассматриваемого транспортного средства, обнаруженной на этапе S106, до траектории движения рассматриваемого транспортного средства, обнаруженной на этапе S107. Например, функция оценки позиции рассматриваемого транспортного средства выполняется для того, чтобы обнаруживать расстояние d0 между каждой из позиций (Xpl[0], Ypl[0], Xpr[0], Ypr[0]) правой и левой граничных линий полосы движения и позицией (Xp[0], Yp[0]) траектории движения, которые обнаруживаются в текущем процессе. Функция оценки позиции рассматриваемого транспортного средства также используется для того, чтобы обнаруживать расстояние d1 между каждой из позиций (Xpl[1], Ypl[1], Xpr[1], Ypr[1]) правой и левой граничных линий полосы движения и позицией (Xp[1], Yp[1]) траектории движения, которые обнаруживаются в предыдущем процессе. Аналогично, функция оценки позиции рассматриваемого транспортного средства может использоваться для того, чтобы обнаруживать расстояния d2 - d(n-1) между позициями правой и левой граничных линий полосы движения и позициями траектории движения, которые обнаруживаются в последних n процессов.
[0033] На этапе S109, функция оценки позиции рассматриваемого транспортного средства выполняется для того, чтобы вычислять среднее значение расстояний, которые вычисляются на этапе S108, от каждой граничной линии полосы движения до траектории движения рассматриваемого транспортного средства. Затем на этапе S110, функция оценки позиции рассматриваемого транспортного средства выполняется для того, чтобы определять то, меньше или нет среднее значение расстояний, которые вычисляются на этапе S108, от граничной линии полосы движения до траектории движения рассматриваемого транспортного средства, предварительно определенного значения. Здесь, когда рассматриваемое транспортное средство переезжает через граничную линию полосы движения, среднее значение расстояний от траектории движения рассматриваемого транспортного средства до граничной линии полосы движения является близким к нулю в моменты времени до и после того, как рассматриваемое транспортное средство переезжает через граничную линию полосы движения. В связи с тем, когда среднее значение расстояний от траектории движения рассматриваемого транспортного средства до граничной линии полосы движения меньше предварительно определенного значения, устройство 170 управления определяет то, что рассматриваемое транспортное средство переезжает через граничную линию полосы движения, и процедура переходит к этапу S115, проиллюстрированному на фиг. 3. С другой стороны, когда среднее значение расстояний от траектории движения рассматриваемого транспортного средства до граничной линии полосы движения не меньше предварительно определенного значения, устройство 170 управления определяет то, что рассматриваемое транспортное средство не переезжает через граничную линию полосы движения, и процедура переходит к этапу S111, проиллюстрированному на фиг. 3.
[0034] На этапе S111, функция оценки позиции рассматриваемого транспортного средства выполняется для того, чтобы формировать линию определения, которая соединяется между текущей позицией рассматриваемого транспортного средства, оцененной в текущем процессе, и позицией рассматриваемого транспортного средства, обнаруженной в предыдущем процессе. В настоящем варианте осуществления, как проиллюстрировано на фиг. 7(A), позиция оценки по одометрии на основе результата обнаружения датчика 110 обнаружения состояния движения и позиция по GPS-оценке на основе результата измерений GPS-модуля 130 оцениваются в качестве текущей позиции рассматриваемого транспортного средства. В силу этого, как проиллюстрировано на фиг. 7(B), функция оценки позиции рассматриваемого транспортного средства выполняется для того, чтобы формировать линию определения, которая соединяется между позицией оценки по одометрии и позицией рассматриваемого транспортного средства, обнаруженной в предыдущем процессе, в качестве линии определения согласно одометрии. Помимо этого, как проиллюстрировано на фиг. 7(C), функция оценки позиции рассматриваемого транспортного средства выполняется для того, чтобы формировать линию определения, которая соединяется между позицией по GPS-оценке и позицией рассматриваемого транспортного средства, обнаруженной в предыдущем процессе, в качестве линии GPS-определения.
[0035] На этапе S112, функция оценки позиции рассматриваемого транспортного средства выполняется для того, чтобы определять позиционные взаимосвязи между линиями определения, сформированными на этапе S111, и граничной линией полосы движения. В частности, функция оценки позиции рассматриваемого транспортного средства выполняется для того, чтобы определять то, пересекают или нет линии определения граничную линию полосы движения. Например, в примере, проиллюстрированном на фиг. 7, устройство 170 управления определяет то, что линия определения согласно одометрии на основе результата обнаружения датчика 110 обнаружения состояния движения не пересекает граничную линию полосы движения, как проиллюстрировано на фиг. 7(B). С другой стороны, как проиллюстрировано на фиг. 7(C), устройство 170 управления определяет то, что линия GPS-определения на основе результата измерений GPS-модуля 130 пересекает граничную линию полосы движения.
[0036] На этапе S113, функция оценки позиции рассматриваемого транспортного средства выполняется для того, чтобы определять то, являются или нет идентичными результат определения позиционной взаимосвязи между линией определения согласно одометрии и граничной линией полосы движения и результат определения позиционной взаимосвязи между линией GPS-определения и граничной линией полосы движения. Эти результаты определения определяются на этапе S112. Например, когда выполняется определение в отношении того, что как линия GPS-определения, так и линия определения согласно одометрии пересекают граничную линию полосы движения, или когда выполняется определение в отношении того, что как линия GPS-определения, так и линия определения согласно одометрии не пересекают граничную линию полосы движения, функция оценки позиции рассматриваемого транспортного средства выполняется для того, чтобы определять то, что являются идентичными или нет результат определения позиционной взаимосвязи между линией определения согласно одометрии и граничной линией полосы движения и результат определения позиционной взаимосвязи между линией GPS-определения и граничной линией полосы движения. После этого, когда результат определения позиционной взаимосвязи между линией определения согласно одометрии и граничной линией полосы движения и результат определения позиционной взаимосвязи между линией GPS-определения и граничной линией полосы движения являются идентичными, процедура переходит к этапу S115. С другой стороны, когда результат определения позиционной взаимосвязи между линией определения согласно одометрии и граничной линией полосы движения и результат определения позиционной взаимосвязи между линией GPS-определения и граничной линией полосы движения не являются идентичными, процедура переходит к этапу S114. Например, в примере, проиллюстрированном на фиг. 7, линия определения согласно одометрии на основе результата обнаружения датчика 110 обнаружения состояния движения не пересекает граничную линию полосы движения, как проиллюстрировано на фиг. 7(B), в то время как линия GPS-определения на основе результата измерений GPS-модуля 130 пересекает граничную линию полосы движения, как проиллюстрировано на фиг. 7(C). Функция оценки позиции рассматриваемого транспортного средства в силу этого выполняется для того, чтобы определять то, что результат определения позиционной взаимосвязи между линией определения согласно одометрии и граничной линией полосы движения и результат определения позиционной взаимосвязи между линией GPS-определения и граничной линией полосы движения не являются идентичными, и процедура переходит к этапу S114.
[0037] На этапе S115, функция определения позиции рассматриваемого транспортного средства выполняется для того, чтобы определять позицию по GPS-оценке на основе результата измерений GPS-модуля 130 в качестве текущей позиции рассматриваемого транспортного средства. В частности, функция определения позиции рассматриваемого транспортного средства выполняется для того, чтобы задавать GPS-позицию (Xg, Yg) на основе результата измерений GPS-модуля 130 в качестве текущей позиции (Xrec, Yrec) рассматриваемого транспортного средства. Таким образом, когда устройство 170 управления определяет то, что как позиция рассматриваемого транспортного средства на основе результата обнаружения датчика 110 обнаружения состояния движения, так и позиция рассматриваемого транспортного средства на основе результата измерений GPS-модуля 130 находятся в идентичной полосе движения, позиция по GPS-оценке используется в качестве текущей позиции рассматриваемого транспортного средства.
[0038] С другой стороны, когда устройство 170 управления определяет то, что, как проиллюстрировано на фиг. 7(B), (C), позиционная взаимосвязь между линией определения согласно одометрии и граничной линией полосы движения и позиционная взаимосвязь между линией GPS-определения и граничной линией полосы движения не являются идентичными, процедура переходит к этапу S114. На этапе S114, функция определения позиции рассматриваемого транспортного средства выполняется для того, чтобы определять позицию оценки по одометрии на основе результата обнаружения датчика 110 обнаружения состояния движения в качестве позиционной информации рассматриваемого транспортного средства. В частности, функция определения позиции рассматриваемого транспортного средства выполняется для того, чтобы задавать позицию (Xp, Yp) оценки по одометрии на основе результата обнаружения датчика 110 обнаружения состояния движения в качестве текущей позиции (Xrec, Yrec) рассматриваемого транспортного средства. Таким образом, когда позиция рассматриваемого транспортного средства на основе результата обнаружения датчика 110 обнаружения состояния движения и позиция рассматриваемого транспортного средства на основе результата измерений GPS-модуля 130 находятся в отдельных полосах движения, позиция оценки по одометрии используется в качестве текущей позиции рассматриваемого транспортного средства.
[0039] На этапе S116, устройство 170 управления добавляет текущую позицию (Xrec, Yrec) рассматриваемого транспортного средства, заданную на этапе S114 или S115, в список позиций движения рассматриваемого транспортного средства, сохраненный в запоминающем устройстве устройства 170 управления. Через эту операцию, когда траектория движения рассматриваемого транспортного средства задается на этапе S108 во время следующего процесса, позиционная информация (Xrec, Yrec) рассматриваемого транспортного средства в текущем процессе может использоваться в качестве позиционной информации рассматриваемого транспортного средства во время предыдущего процесса. Аналогично, набор позиций (Xl_r, Yl_r, Xr_r, Yr_r) граничных линий полосы движения, которые обнаруживаются на этапе S103 и преобразуются в систему координат поверхности дороги на этапе S104, добавляется в список позиций граничных линий полосы движения, сохраненных в запоминающем устройстве устройства 170 управления. Через эту операцию, когда наборы позиций граничных линий полосы движения за последние n раз получаются на этапе S105 во время следующего процесса, набор позиций (Xl_r, Yl_r, Xr_r, Yr_r) граничных линий полосы движения во время текущего процесса может использоваться в качестве набора позиций граничных линий полосы движения во время предыдущего процесса.
[0040] Когда, на этапе S110, устройство 170 управления определяет то, что среднее значение расстояний от граничной линии полосы движения до траектории движения рассматриваемого транспортного средства меньше предварительно определенного значения, т.е. когда рассматриваемое транспортное средство переезжает через граничную линию полосы движения, процедура также переходит к этапу S115, на котором функция определения позиции рассматриваемого транспортного средства выполняется для того, чтобы выполнять процесс оценки позиции по GPS-оценке в качестве позиции рассматриваемого транспортного средства. Когда рассматриваемое транспортное средство переезжает через граничную линию полосы движения, если позиция рассматриваемого транспортного средства оценивается на основе позиционных взаимосвязей между линиями определения и граничной линией полосы движения, результат оценки позиции рассматриваемого транспортного средства может быть нестабильным. В силу этого, когда рассматриваемое транспортное средство переезжает через граничную линию полосы движения, позиция по GPS-оценке может использоваться в качестве текущей позиции рассматриваемого транспортного средства, чтобы за счет этого стабильно оценивать позицию рассматриваемого транспортного средства.
[0041] Как описано выше, в первом варианте осуществления, когда как позиция рассматриваемого транспортного средства, оцененная на основе результата измерений GPS-модуля 130, так и позиция рассматриваемого транспортного средства, оцененная на основе результата обнаружения датчика 110 обнаружения состояния движения, находятся в идентичной полосе движения, позиция по GPS-оценке на основе результата измерений GPS-модуля 130 оценивается в качестве текущей позиции рассматриваемого транспортного средства, в то время как, когда обе из них не находятся в идентичной полосе движения, позиция оценки по одометрии на основе результата обнаружения датчика 110 обнаружения состояния движения оценивается в качестве текущей позиции рассматриваемого транспортного средства. Через эту операцию, даже когда ошибка обнаружения GPS-модуля 130 возникает, позиция, в которой движется рассматриваемое транспортное средство, может надлежащим образом определяться на уровне полосы движения на основе результата обнаружения датчика 110 обнаружения состояния движения.
[0042] Кроме того, настоящий вариант осуществления определяет то, переходит или нет позиция оценки по одометрии на основе результата обнаружения датчика 110 обнаружения состояния движения через граничную линию полосы движения, и то, переходит или нет позиция по GPS-оценке на основе результата измерений GPS-модуля 130 через граничную линию полосы движения, и определяет то, являются или нет идентичными результат определения на основе результата обнаружения датчика 110 обнаружения состояния движения и результат определения на основе результата измерений GPS-модуля 130. Таким образом, настоящий вариант осуществления определяет то, находятся или нет позиция рассматриваемого транспортного средства на основе результата обнаружения датчика 110 обнаружения состояния движения и позиция рассматриваемого транспортного средства на основе результата измерений GPS-модуля 130 в идентичной полосе движения. Таким образом, когда результат определения на основе результата обнаружения датчика 110 обнаружения состояния движения и результат определения на основе результата измерений GPS-модуля 130 не являются идентичными, настоящий вариант осуществления определяет то, что позиция рассматриваемого транспортного средства на основе результата обнаружения датчика 110 обнаружения состояния движения и позиция рассматриваемого транспортного средства на основе результата измерений GPS-модуля 130 не находятся в идентичной полосе движения, и позиция рассматриваемого транспортного средства оценивается с использованием результата обнаружения датчика 110 обнаружения состояния движения, в котором ошибка возникает с меньшей вероятностью, вместо использования результата измерений GPS-модуля 130, в котором ошибка может легко возникать. Через эту операцию, позиция, в которой движется рассматриваемое транспортное средство, может надлежащим образом определяться на уровне полосы движения.
[0043] Фиг. 8(A) является видом, иллюстрирующим пример ошибки позиции рассматриваемого транспортного средства на основе результата измерений GPS-модуля 130, и фиг. 8(B) является видом, иллюстрирующим пример ошибки позиции рассматриваемого транспортного средства на основе результата обнаружения датчика 110 обнаружения состояния движения. На фиг. 8(A), (B), вертикальные оси представляют ошибку между оцененной позицией рассматриваемого транспортного средства и фактической позицией рассматриваемого транспортного средства при многократном обнаружении позиции рассматриваемого транспортного средства на основе результата измерений GPS-модуля 130 или позиции рассматриваемого транспортного средства на основе результата обнаружения датчика 110 обнаружения состояния движения. GPS-модуль 130 повторяет измерение позиции рассматриваемого транспортного средства посредством многократного приема радиоволн, передаваемых из спутников связи. Соответственно, как проиллюстрировано на фиг. 8(A), постоянная ошибка имеет тенденцию возникать в позиции рассматриваемого транспортного средства на основе результата измерений GPS-модуля 130 независимо от истекшего времени. Напротив, когда позиция рассматриваемого транспортного средства оценивается на основе результата обнаружения датчика 110 обнаружения состояния движения, текущая позиция рассматриваемого транспортного средства оценивается посредством суммирования величины (Δx, Δy) перемещения, перемещенной из предыдущей позиции рассматриваемого транспортного средства, с ранее оцененной позицией рассматриваемого транспортного средства. Соответственно, как проиллюстрировано на фиг. 8(B), ошибки накапливаются со временем, и ошибка имеет тенденцию увеличиваться в позиции рассматриваемого транспортного средства на основе результата обнаружения датчика 110 обнаружения состояния движения. Тем не менее, к счастью, ошибка позиции рассматриваемого транспортного средства меньше в результате обнаружения датчика 110 обнаружения состояния движения, чем в результате измерений GPS-модуля 130 до тех пор, пока не пройдет определенное время (например, до тех пор, пока не пройдет время t1 по фиг. 8(B)), как проиллюстрировано на фиг. 8(B), поскольку точность обнаружения позиции рассматриваемого транспортного средства является более высокой в результате обнаружения датчика 110 обнаружения состояния движения, чем в результате измерений GPS-модуля 130. Таким образом, когда результат определения позиции рассматриваемого транспортного средства на основе результата обнаружения датчика 110 обнаружения состояния движения и результат определения позиции рассматриваемого транспортного средства на основе результата измерений GPS-модуля 130 отличаются, позиция, в которой движется рассматриваемое транспортное средство, может надлежащим образом оцениваться до тех пор, пока не пройдет определенное время (например, до тех пор, пока не пройдет время t1 по фиг. 8(B)), с использованием результата обнаружения датчика 110 обнаружения состояния движения, в котором ошибка возникает с меньшей вероятностью, вместо использования результата измерений GPS-модуля 130, в котором ошибка может легко возникать. Ниже описывается процесс учета случая, в котором определенное время проходит, во втором варианте осуществления.
[0044] Кроме того, в первом варианте осуществления, вычисляется среднее значение расстояний между траекторией движения рассматриваемого транспортного средства и граничной линией полосы движения. Когда среднее значение меньше предварительно определенного значения, первый вариант осуществления определяет то, что рассматриваемое транспортное средство переезжает через граничную линию полосы движения (без определения того, что позиция по GPS-оценке переходит через граничную линию полосы движения вследствие погрешности измерения в GPS-модуле 130), и позиция по GPS-оценке оценивается в качестве текущей позиции рассматриваемого транспортного средства. Таким образом, при определении того, что рассматриваемое транспортное средство переезжает через граничную линию полосы движения, позиция по GPS-оценке оценивается в качестве текущей позиции рассматриваемого транспортного средства, без определения того, являются или нет идентичными результат определения позиционной взаимосвязи между позицией оценки по одометрии и граничной линией полосы движения и результат определения позиционной взаимосвязи между позицией по GPS-оценке и граничной линией полосы движения. Через эту операцию, даже в окружении, в котором позиция рассматриваемого транспортного средства не может стабильно оцениваться с использованием позиционной взаимосвязи между позицией рассматриваемого транспортного средства и граничной линией полосы движения, поскольку рассматриваемое транспортное средство фактически переезжает через граничную линию полосы движения, позиция по GPS-оценке может оцениваться в качестве текущей позиции рассматриваемого транспортного средства, чтобы за счет этого стабильно оценивать позицию рассматриваемого транспортного средства. Помимо этого, в настоящем варианте осуществления, среднее значение расстояний между траекторией движения рассматриваемого транспортного средства и граничной линией полосы движения используется для того, чтобы определять то, переезжает или нет рассматриваемое транспортное средство непрерывно через граничную линию полосы движения, и можно надлежащим образом определять это, переезжает или нет рассматриваемое транспортное средство через граничную линию полосы движения.
[0045] Второй вариант осуществления
Далее описывается устройство управления движением согласно второму варианту осуществления настоящего изобретения. Устройство 100 управления движением согласно второму варианту осуществления имеет конфигурацию, идентичную конфигурации устройства 100 управления движением согласно первому варианту осуществления, и работает идентично первому варианту осуществления за исключением того, что устройство 100 управления движением работает так, как описано ниже.
[0046] Устройство 170 управления согласно второму варианту осуществления имеет модифицированную функцию определения позиции рассматриваемого транспортного средства по сравнению с функцией в первом варианте осуществления. Таким образом, в случае если процесс оценки позиции оценки по одометрии в качестве текущей позиции рассматриваемого транспортного средства последовательно выполняется предварительно определенное число раз или более, поскольку результат определения, полученный посредством определения того, переходит или нет позиция рассматриваемого транспортного средства через граничную линию полосы движения на основе результата обнаружения датчика 110 обнаружения состояния движения, и результат определения, полученный посредством определения того, переходит или нет позиция рассматриваемого транспортного средства через граничную линию полосы движения на основе результата измерений GPS-модуля 130, не являются идентичными, даже когда вышеуказанные результаты определения не являются идентичными, позиция по GPS-оценке оценивается в качестве текущей позиции рассматриваемого транспортного средства. Причина этого заключается в следующем. Когда позиция рассматриваемого транспортного средства оценивается на основе результата обнаружения датчика 110 обнаружения состояния движения, ошибки накапливаются со временем, как проиллюстрировано на фиг. 8(B), и ошибка имеет тенденцию увеличиваться в позиции рассматриваемого транспортного средства на основе результата обнаружения датчика 110 обнаружения состояния движения. В силу этого, когда процесс оценки позиции оценки по одометрии в качестве текущей позиции рассматриваемого транспортного средства последовательно выполняется предварительно определенное число раз или более, позиция по GPS-оценке оценивается в качестве текущей позиции рассматриваемого транспортного средства, и в силу этого может подавляться ошибка в оцененной позиции рассматриваемого транспортного средства.
[0047] Далее описывается процесс управления движением согласно второму варианту осуществления. Процесс управления движением согласно второму варианту осуществления является идентичным процессу управления движением согласно первому варианту осуществления за исключением того, что процесс, проиллюстрированный на фиг. 7, выполняется в качестве замены для процесса, проиллюстрированного на фиг. 3. В силу этого, в нижеприведенном описании описывается процесс, проиллюстрированный на фиг. 7, и описание процесса, проиллюстрированного на фиг. 2, опускается.
[0048] Во втором варианте осуществления, аналогично первому варианту осуществления, как проиллюстрировано на фиг. 7(B), (C), формируются линия определения согласно одометрии и линия GPS-определения (этап S111), и определяются позиционная взаимосвязь между линией определения согласно одометрии и граничной линией полосы движения и позиционная взаимосвязь между линией GPS-определения и граничной линией полосы движения (этап S112). После этого, когда результат определения позиционной взаимосвязи между линией определения согласно одометрии и граничной линией полосы движения и результат определения позиционной взаимосвязи между линией GPS-определения и граничной линией полосы движения являются идентичными (этап S113="Да"), позиция по GPS-оценке оценивается в качестве текущей позиции рассматриваемого транспортного средства (этап S115).
[0049] С другой стороны, когда, на этапе S113, когда результат определения позиционной взаимосвязи между линией определения согласно одометрии и граничной линией полосы движения и результат определения позиционной взаимосвязи между линией GPS-определения и граничной линией полосы движения не являются идентичными, процедура переходит к этапу S201. На этапе S201, функция определения позиции рассматриваемого транспортного средства выполняется для того, чтобы определять то, составляет или нет число K раз, когда выполняется процесс (процесс этапа S114) оценки позиции оценки по одометрии на основе результата обнаружения датчика 110 обнаружения состояния движения в качестве позиции рассматриваемого транспортного средства последовательно, предварительно определенное число S раз или более.
[0050] Когда число K раз последовательного выполнения меньше предварительно определенного числа S раз, процедура переходит к этапу S114, на котором позиция оценки по одометрии на основе результата обнаружения датчика 110 обнаружения состояния движения оценивается в качестве текущей позиции рассматриваемого транспортного средства. Затем на этапе S202, функция определения позиции рассматриваемого транспортного средства выполняется для того, чтобы выполнять процесс постепенного увеличения K на единицу.
[0051] С другой стороны, когда число K раз последовательного выполнения составляет предварительно определенное числом S раз или более, процедура переходит к этапу S115, на котором позиция по GPS-оценке на основе результата измерений GPS-модуля 130 оценивается в качестве текущей позиции рассматриваемого транспортного средства. Затем на этапе S203, функция определения позиции рассматриваемого транспортного средства выполняется для того, чтобы выполнять процесс сброса числа K раз последовательного выполнения до нуля.
[0052] Как описано выше, во втором варианте осуществления, когда результат определения позиционной взаимосвязи между линией определения согласно одометрии и граничной линией полосы движения и результат определения позиционной взаимосвязи между линией GPS-определения и граничной линией полосы движения не являются идентичными, и в силу этого, число K раз, когда позиция оценки по одометрии на основе результата обнаружения датчика 110 обнаружения состояния движения последовательно оценивается в качестве позиции рассматриваемого транспортного средства, становится предварительно определенным числом S раз или более, позиция оценки по одометрии более не оценивается в качестве текущей позиции рассматриваемого транспортного средства, и позиция по GPS-оценке на основе результата измерений GPS-модуля 130 оценивается в качестве текущей позиции рассматриваемого транспортного средства. Через эту работу второго варианта осуществления, можно эффективно подавлять ошибку оцененной позиции рассматриваемого транспортного средства вследствие последовательной оценки позиции оценки по одометрии на основе результата обнаружения датчика 110 обнаружения состояния движения в качестве текущей позиции рассматриваемого транспортного средства.
[0053] Это описывается подробнее. Когда позиция рассматриваемого транспортного средства оценивается на основе результата обнаружения датчика 110 обнаружения состояния движения, текущая позиция рассматриваемого транспортного средства оценивается посредством суммирования величины (Δx, Δy) перемещения, перемещенной из предыдущей позиции рассматриваемого транспортного средства, с ранее оцененной позицией рассматриваемого транспортного средства. Соответственно, как проиллюстрировано на фиг. 8(B), ошибки накапливаются со временем, и ошибка имеет тенденцию увеличиваться в позиции рассматриваемого транспортного средства только на основе результата обнаружения датчика 110 обнаружения состояния движения. В силу этого, когда позиция оценки по одометрии на основе результата обнаружения датчика 110 обнаружения состояния движения должна последовательно оцениваться предварительно определенное число раз или более в качестве текущей позиции рассматриваемого транспортного средства, позиция по GPS-оценке оценивается в качестве текущей позиции рассматриваемого транспортного средства, чтобы за счет этого обеспечивать возможность выполнения следующего процесса таким образом, что позиция оценки по одометрии заново оценивается на основе текущей оцененной позиции по GPS-оценке. Накопление ошибок в силу этого подавляется в позиции оценки по одометрии, и позиция рассматриваемого транспортного средства может более надлежащим образом оцениваться в следующем процессе и последующих процессах.
[0054] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0055] Например, в вышеописанных одном или более вариантов осуществления настоящего изобретения, примерно иллюстрируется конфигурация, в которой выполняется определение в отношении того, находятся или нет позиция оценки по одометрии и позиция по GPS-оценке в идентичной полосе движения, посредством определения того, переходит или нет позиция оценки по одометрии на основе результата обнаружения датчика 110 обнаружения состояния движения через граничную линию полосы движения, и того, переходит или нет позиция по GPS-оценке на основе результата измерений GPS-модуля 130 через граничную линию полосы движения, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой выполняется определение в отношении того, находятся или нет позиция оценки по одометрии и позиция по GPS-оценке в идентичной полосе движения, например, на основе позиционной взаимосвязи между позицией оценки по одометрии и граничной линией полосы движения и позиционной взаимосвязи между позицией по GPS-оценке и граничной линией полосы движения (например, того, расположена позиция оценки по одометрии или позиция по GPS-оценке в правой стороне относительно граничной линии с правой стороны полосы движения).
[0056] В вышеописанных одном или более вариантов осуществления настоящего изобретения, примерно иллюстрируется конфигурация для определения того, что рассматриваемое транспортное средство фактически переезжает через граничную линию полосы движения, когда среднее значение расстояний от траектории рассматриваемого транспортного средства до граничной линии полосы движения меньше предварительно определенного значения, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, расстояние от траектории рассматриваемого транспортного средства до граничной линии полосы движения многократно обнаруживается, и выполняется определение в отношении того, что рассматриваемое транспортное средство переезжает через граничную линию полосы движения, когда расстояние от траектории рассматриваемого транспортного средства до граничной линии полосы движения становится меньше предварительно определенного значения.
[0057] В вышеописанном втором варианте осуществления, примерно иллюстрируется конфигурация, в которой позиция по GPS-оценке на основе результата измерений GPS-модуля 130 оценивается в качестве текущей позиции рассматриваемого транспортного средства, когда число K раз, когда позиция оценки по одометрии последовательно оценивается в качестве текущей позиции рассматриваемого транспортного средства, становится предварительно определенным числом S раз или более, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой позиция по GPS-оценке на основе результата измерений GPS-модуля 130 оценивается в качестве текущей позиции рассматриваемого транспортного средства, например, когда время, в течение которого позиция оценки по одометрии последовательно оценивается в качестве текущей позиции рассматриваемого транспортного средства, становится предварительно определенным временем или более, либо когда проезжаемое расстояние, в котором позиция оценки по одометрии последовательно оценивается в качестве текущей позиции рассматриваемого транспортного средства, становится предварительно определенным расстоянием или более.
[0058] В вышеописанных одном или более вариантов осуществления настоящего изобретения, GPS-модуль 130 соответствует приемному устройству настоящего изобретения, датчик 110 обнаружения состояния движения соответствует первому детектору настоящего изобретения, датчик 120 обнаружения окружающей ситуации соответствует второму детектору настоящего изобретения, и устройство 100 управления движением соответствует устройству управления движением настоящего изобретения.
Описание номеров ссылок
[0059] 100 - устройство управления движением
110 - датчик обнаружения состояния движения
120 - датчик обнаружения окружающей ситуации
130 - GPS-модуль
140 - картографическая база данных
150 - устройство представления
160 - устройство управления приведением в движение
170 - устройство управления
Настоящее изобретение относится к способу управления движением, осуществляемому посредством устройства управления движением, которое управляет движением транспортного средства, а также к устройству управления движением. Устройство управления движением включает в себя приемное устройство (130), выполненное с возможностью принимать позиционную информацию рассматриваемого транспортного средства из внешнего устройства, первый детектор (110), оснащенный в рассматриваемом транспортном средстве и выполненный с возможностью обнаруживать состояние рассматриваемого транспортного средства, и второй детектор (120), выполненный с возможностью обнаруживать ситуацию рядом с рассматриваемым транспортным средством. Устройство управления движением оценивает позицию рассматриваемого транспортного средства. Способ управления включает в себя этап оценки позиции рассматриваемого транспортного средства на основе результата обнаружения первого детектора (110), этап обнаружения полосы движения, в которой движется рассматриваемое транспортное средство, на основе результата обнаружения второго детектора (120), этап определения того, включена или нет позиция рассматриваемого транспортного средства на основе позиционной информации в полосу движения, и вывода определения в качестве первого результата определения, и этап определения того, включена или нет позиция рассматриваемого транспортного средства, оцененная на основе результата обнаружения первого детектора (110), в полосу движения, и вывода определения в качестве второго результата определения, и этап выполнения процесса оценки позиции для оценки позиции рассматриваемого транспортного средства на основе результата обнаружения первого детектора (110), когда первый результат определения и второй результат определения не являются идентичными. Технический результат – точное определение полосы движения, в которой движется транспортное средство. 2 н. и 6 з.п. ф-лы, 9 ил.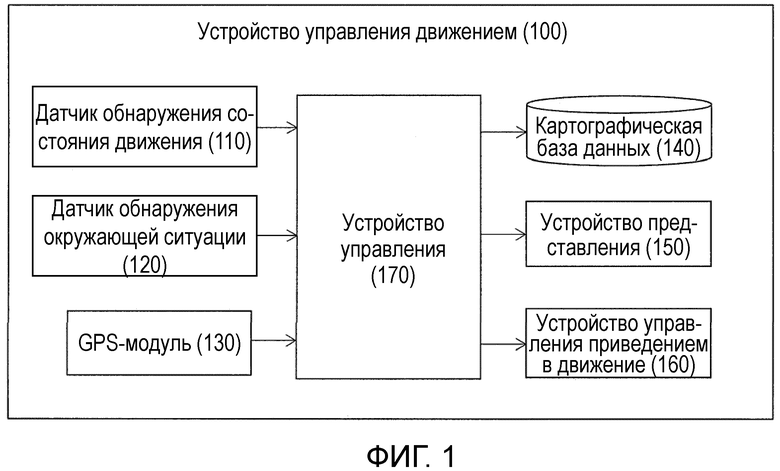
1. Способ управления движением, осуществляемый посредством устройства управления движением, причем устройство управления движением содержит:
приемное устройство, принимающее позиционную информацию рассматриваемого транспортного средства из внешнего устройства;
первый детектор, оснащенный в рассматриваемом транспортном средстве и обнаруживающий состояние рассматриваемого транспортного средства; и
второй детектор, обнаруживающий ситуацию рядом с рассматриваемым транспортным средством,
устройство управления движением, оценивающее позицию рассматриваемого транспортного средства,
при этом способ управления содержит этапы, на которых:
оценивают позицию рассматриваемого транспортного средства на основе результата обнаружения первого детектора;
обнаруживают полосу движения, в которой движется рассматриваемое транспортное средство, на основе результата обнаружения второго детектора;
выполняют первый процесс определения для определения того, включена или нет позиция рассматриваемого транспортного средства на основе позиционной информации в полосу движения, и выводят первый результат определения, полученный посредством первого процесса определения;
выполняют второй процесс определения для определения того, включена или нет позиция рассматриваемого транспортного средства, оцененная на основе результата обнаружения первого детектора, в полосу движения, и выводят второй результат определения, полученный посредством второго процесса определения; и
выполняют процесс оценки позиции для оценки позиции рассматриваемого транспортного средства на основе результата обнаружения первого детектора, когда первый результат определения и второй результат определения не являются идентичными.
2. Способ управления движением по п. 1, содержащий этап, на котором:
оценивают позицию рассматриваемого транспортного средства на основе позиционной информации, когда первый результат определения и второй результат определения являются идентичными.
3. Способ управления движением по п. 1, содержащий этап, на котором:
оценивают позицию рассматриваемого транспортного средства без использования позиционной информации, когда первый результат определения и второй результат определения не являются идентичными.
4. Способ управления движением по п. 1, содержащий этапы, на которых:
обнаруживают граничную линию полосы движения, в которой движется рассматриваемое транспортное средство, на основе результата обнаружения второго детектора;
определяют то, что позиция рассматриваемого транспортного средства на основе позиционной информации не включена в полосу движения, когда позиция рассматриваемого транспортного средства на основе позиционной информации переходит через граничную линию полосы движения; и
определяют то, что позиция рассматриваемого транспортного средства, оцененная на основе результата обнаружения первого детектора, не включена в полосу движения, когда позиция рассматриваемого транспортного средства, оцененная на основе результата обнаружения первого детектора, переходит через граничную линию полосы движения.
5. Способ управления движением по п. 4, содержащий этап, на котором:
определяют то, следует или нет выполнять процесс оценки позиции на основе расстояния между траекторией движения рассматриваемого транспортного средства и граничной линией полосы движения.
6. Способ управления движением по п. 5, содержащий этап, на котором:
определяют не выполнять процесс оценки позиции, когда среднее значение расстояний от траектории движения рассматриваемого транспортного средства до граничной линии полосы движения меньше предварительно определенного значения.
7. Способ управления движением по любому из пп. 1-6, содержащий этап, на котором:
оценивают позицию рассматриваемого транспортного средства на основе позиционной информации в качестве замены для результата обнаружения первого детектора, когда первый результат определения и второй результат определения не являются идентичными, и процесс оценки позиции рассматриваемого транспортного средства на основе результата обнаружения первого детектора многократно выполняется в течение определенного периода или более, который представляется посредством предварительно определенного числа раз, предварительно определенного времени или предварительно определенного проезжаемого расстояния.
8. Устройство управления движением, содержащее:
приемное устройство, принимающее позиционную информацию рассматриваемого транспортного средства из внешнего устройства;
первый детектор, оснащенный в рассматриваемом транспортном средстве и обнаруживающий состояние рассматриваемого транспортного средства;
второй детектор, обнаруживающий ситуацию рядом с рассматриваемым транспортным средством; и
контроллер, выполненный с возможностью оценивать позицию рассматриваемого транспортного средства,
причем контроллер дополнительно выполнен с возможностью:
оценивать позицию рассматриваемого транспортного средства на основе результата обнаружения первого детектора;
обнаруживать полосу движения, в которой движется рассматриваемое транспортное средство, на основе результата обнаружения второго детектора;
выполнять первый процесс определения для определения что, включена или нет позиция рассматриваемого транспортного средства на основе позиционной информации в полосу движения, и выводить первый результат определения, полученный посредством первого процесса определения;
выполнять второй процесс определения для определения того, включена или нет позиция рассматриваемого транспортного средства, оцененная на основе результата обнаружения первого детектора, в полосу движения, и выводить второй результат определения, полученный посредством второго процесса определения; и
оценивать позицию рассматриваемого транспортного средства на основе результата обнаружения первого детектора, когда первый результат определения и второй результат определения не являются идентичными.
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2492083C1 |
| УСТРОЙСТВО КОНТРОЛЯ ВОЖДЕНИЯ | 2010 |
|
RU2520855C2 |
| US 6510386 B2, 21.01.2003 | |||
| Ходовая часть крана | 1987 |
|
SU1498695A1 |

