Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления движением для транспортного средства и к аппарату управления движением для транспортного средства.
Уровень техники
[0002] На сегодня в данной области техники известна технология обнаружения движущегося объекта, существующего рядом с рассматриваемым транспортным средством, и определения того, приближаются или нет обнаруженный движущийся объект и рассматриваемое транспортное средство вплотную друг к другу на пешеходном переходе (например, патентный документ 1: JP2014-93040A).
Документы уровня техники
Патентные документы
[0003] Патентный документ 1. JP2014-93040A
Сущность изобретения
Задачи, решаемые изобретением
[0004] В предшествующем уровне техники, к сожалению, даже для движущегося объекта, который находится на большом расстоянии от пешеходного перехода и в силу этого с меньшей вероятностью должен пересекать пешеходный переход, выполняется определение в отношении того, приближается или нет движущийся объект вплотную к рассматриваемому транспортному средству на пешеходном переходе. Это может быть проблематичным.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять способ управления движением для транспортного средства и аппарат управления движением для транспортного средства, с помощью которых, когда рассматриваемое транспортное средство приближается к пешеходному переходу, движущийся объект, который может приближаться вплотную к рассматриваемому транспортному средству, может надлежащим образом обнаруживаться.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную задачу посредством указания пешеходного перехода, через который предположительно должно проезжать рассматриваемое транспортное средство, в качестве целевого пешеходного перехода, обнаружения дорожной конфигурации около целевого пешеходного перехода, оценки линии движения движущегося объекта, пересекающего целевой пешеходный переход, на основе дорожной конфигурации, задания области, включающей в себя оцененную линию движения, в качестве области обнаружения и обнаружения движущегося объекта в области обнаружения.
Преимущества изобретения
[0007] Согласно настоящему изобретению, область обнаружения задается на основе линии движения движущегося объекта, пересекающего целевой пешеходный переход. Когда рассматриваемое транспортное средство приближается к целевому пешеходному переходу, в силу этого движущийся объект, который может приближаться вплотную к рассматриваемому транспортному средству, может надлежащим образом обнаруживаться.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей аппарат управления движением для транспортного средства согласно одному или более вариантам осуществления настоящего изобретения.
Фиг. 2 является схемой, иллюстрирующей пример информации соединений и информации области пешеходного перехода, которая содержится в картографической информации.
Фиг. 3 является схемой, иллюстрирующей пример линии движения движущегося объекта, пересекающего пешеходный переход.
Фиг. 4 является блок-схемой последовательности операций способа (часть 1), иллюстрирующей пример процесса управления движением согласно первому варианту осуществления настоящего изобретения.
Фиг. 5 является блок-схемой последовательности операций способа (часть 2), иллюстрирующей пример процесса управления движением согласно первому варианту осуществления настоящего изобретения.
Фиг. 6 является схемой, иллюстрирующей пример области обнаружения.
Фиг. 7 является схемой для описания примера способа задания области обнаружения, когда существуют дорожные ограждения и стоп-линии.
Фиг. 8 является схемой, иллюстрирующей пример области обнаружения, когда существуют стоп-линии.
Фиг. 9 является схемой, иллюстрирующей пример области обнаружения, когда существуют дорожные ограждения.
Фиг. 10 является набором схем для описания примера взаимосвязи между расстоянием до целевого пешеходного перехода и областью обнаружения.
Фиг. 11 является схемой для описания примеров областей ожидания.
Фиг. 12 является схемой для описания примеров длин областей ожидания и расстояний перемещения.
Фиг. 13 является схемой, иллюстрирующей пример области обнаружения, расширенной на области ожидания.
Фиг. 14 является схемой, примерно иллюстрирующей пример линии движения движущегося объекта, перемещающегося к целевому пешеходному переходу на тротуаре, в придорожной полосе или в разделительной полосе.
Фиг. 15 является схемой для описания примеров областей слияния.
Фиг. 16 является схемой, иллюстрирующей область обнаружения согласно второму варианту осуществления настоящего изобретения.
Фиг. 17 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно второму варианту осуществления настоящего изобретения.
Фиг. 18 является схемой для описания другого примера способа оценки линий движения движущихся объектов.
Режим(ы) осуществления изобретения
[0009] Далее описываются один или более вариантов осуществления настоящего изобретения со ссылками на чертежи. В вариантах осуществления, примерно иллюстрируется и описывается аппарат управления движением для транспортного средства, оборудованный в транспортном средстве.
[0010] Первый вариант осуществления
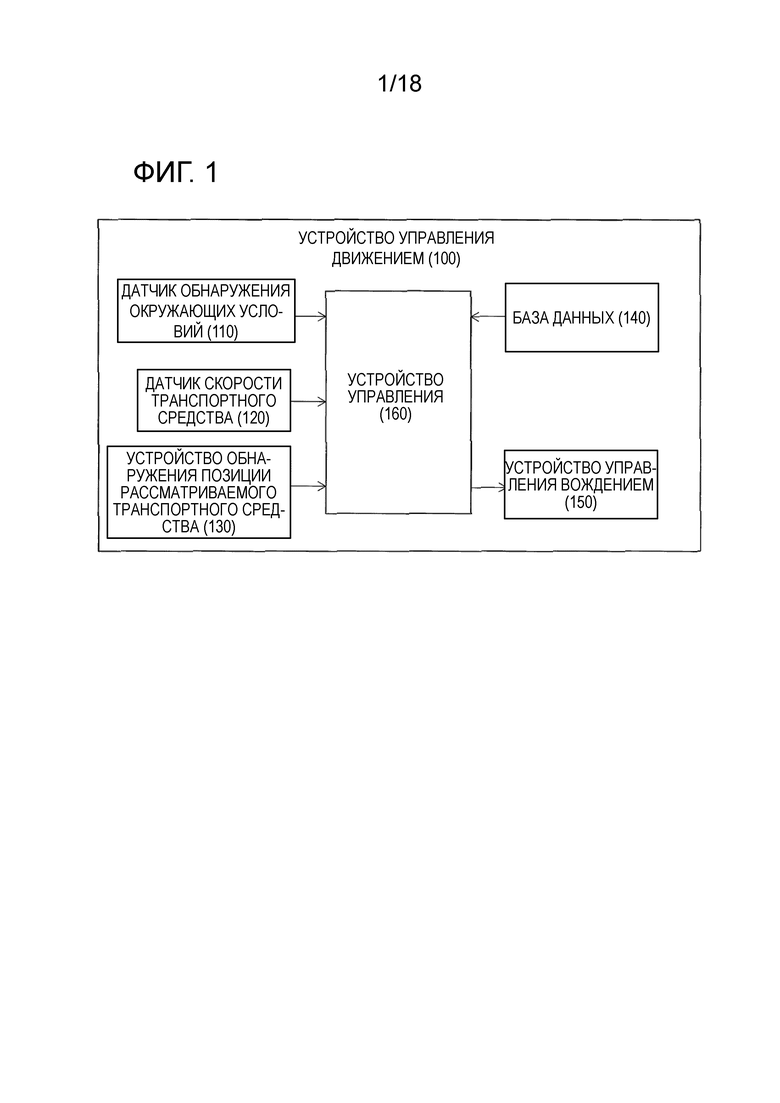
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию аппарата 100 управления движением для транспортного средства согласно варианту осуществления настоящего изобретения. Как проиллюстрировано на фиг. 1, аппарат 100 управления движением для транспортного средства согласно настоящему варианту осуществления включает в себя датчик 110 обнаружения окружающих условий, датчик 120 скорости транспортного средства, устройство 130 обнаружения позиции рассматриваемого транспортного средства, базу 140 данных, устройство 150 управления вождением и устройство 160 управления. Эти устройства соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN для взаимного обмена информацией.
[0011] Датчик 110 обнаружения окружающих условий обнаруживает объекты, присутствующие рядом с рассматриваемым транспортным средством. Примеры такого датчика 110 обнаружения окружающих условий включают в себя камеру переднего вида, которая захватывает изображения впереди рассматриваемого транспортного средства, камеру заднего вида, которая захватывает изображения позади рассматриваемого транспортного средства, передний радар, который обнаруживает помехи впереди рассматриваемого транспортного средства, задний радар, который обнаруживает помехи позади рассматриваемого транспортного средства, и боковые радары, которые обнаруживают помехи, присутствующие по бокам от рассматриваемого транспортного средства. Примеры объектов, обнаруженных посредством датчика 110 обнаружения окружающих условий, включают в себя пешеходов, велосипеды, мотоциклы, автомобили, помехи на дороге, светофоры, знаки на поверхности дороги и пешеходные переходы. Датчик 110 обнаружения окружающих условий может быть сконфигурирован с использованием одного из вышеописанных датчиков либо также может быть сконфигурирован с использованием комбинации из двух или более датчиков. Результаты обнаружения датчика 110 обнаружения окружающих условий выводятся в устройство 160 управления.
[0012] Датчик 120 скорости транспортного средства измеряет частоту вращения приводной системы, к примеру, ведущего вала или колеса и определяет скорость движения транспортного средства (также в дальнейшем называемую "скоростью транспортного средства") на основе измеренной частоты вращения. Информация скорости транспортного средства, определенная посредством датчика 120 скорости транспортного средства, выводится в устройство 160 управления.
[0013] Устройство 130 обнаружения позиции рассматриваемого транспортного средства состоит из GPS-модуля, гиродатчика и других необходимых компонентов. Устройство 130 обнаружения позиции рассматриваемого транспортного средства обнаруживает радиоволны, передаваемые из множества спутников связи с использованием GPS-модуля, чтобы периодически получать позиционную информацию рассматриваемого транспортного средства, и обнаруживает текущую позицию рассматриваемого транспортного средства на основе полученной позиционной информации рассматриваемого транспортного средства, информации варьирования угла, полученной из гиродатчика, и скорости транспортного средства, полученной из датчика 120 скорости транспортного средства. Позиционная информация рассматриваемого транспортного средства, обнаруженная посредством устройства 130 обнаружения позиции рассматриваемого транспортного средства, выводится в устройство 160 управления.
[0014] База 140 данных сохраняет картографическую информацию. Картографическая информация включает в себя информацию соединений каждого из дороги, по которой движется транспортное средство, тротуара и пешеходного перехода. Фиг. 2 является схемой для описания информации соединений картографической информации. Информация соединений дороги, по которой движется транспортное средство, имеет одно или более соединений и один или более узлов каждой полосы движения в качестве информации соединений. Например, в примере, проиллюстрированном на фиг. 2, каждое из соединений LA1 и LA2 полос A1 и A2 движения сохраняется в базе 140 данных в качестве информации соединений дороги, по которой движется рассматриваемое транспортное средство V1. Информация соединений каждого пешеходного перехода имеет одно или более соединений, идущих в направлении длины пешеходного перехода (т.е. в направлении пересечения движущегося объекта, такого как пешеход или велосипед, пересекающий пешеходный переход), в качестве информации соединений. Например, в примере, проиллюстрированном на фиг. 2, соединение LB1 пешеходного перехода B1 сохраняется в базе 140 данных в качестве информации соединений пешеходного перехода.
[0015] Картографическая информация, сохраненная в базе 140 данных, также включает в себя информацию области пешеходных переходов на карте. Форма области пешеходного перехода не ограничена прямоугольной формой и также может представлять собой другую многоугольную форму. Например, в примере, проиллюстрированном на фиг. 2, информация областей, такая как позиция и форма области RB1, занимаемой посредством пешеходного перехода B1 на карте, сохраняется в базе 140 данных. Картографическая информация, сохраненная в базе 140 данных, также включает в себя информацию относительно конфигураций дорог, отличную от пешеходных переходов. Примеры этой информации относительно конфигураций дорог включают в себя информацию относительно тротуаров, придорожных полос и разделительных полос. Например, в примере, проиллюстрированном на фиг. 2, тротуар SW и разделительная полоса SS сохраняются в базе 140 данных в качестве информации относительно конфигураций дорог. Помимо этого, база 140 данных имеет информацию относительно граничных линий полосы движения (таких как разделительные линии и бордюрные камни), стоп-линий, дорожных ограждений, форм дорог, кривизны дорог и т.д. в качестве картографической информации. К картографической информации, сохраненной в базе 140 данных, надлежащим образом обращается устройство 160 управления.
[0016] Устройство 150 управления вождением управляет движением рассматриваемого транспортного средства. Например, когда рассматриваемое транспортное средство управляется с возможностью ехать за едущим впереди транспортным средством (это управление в дальнейшем называется "управлением движением в режиме "ехать за""), устройство 150 управления вождением управляет работой приводного механизма (которая включает в себя работу двигателя внутреннего сгорания в случае автомобиля с двигателем и работу электромотора в случае электромобиля и т.п. и дополнительно включает в себя распределение крутящего момента для двигателя внутреннего сгорания и электромотора в случае гибридного автомобиля) и операцией торможения, чтобы достигать ускорения, замедления и скорости транспортного средства таким образом, что расстояние между рассматриваемым транспортным средством и едущим впереди транспортным средством может поддерживаться равным постоянному расстоянию. Когда рассматриваемое транспортное средство выполняет правый поворот или левый поворот, смену полосы движения и т.п., устройство 150 управления вождением управляет работой актуатора рулевого управления, чтобы управлять работой колес, и в силу этого выполняет управление рулением рассматриваемого транспортного средства. Устройство 150 управления вождением управляет движением рассматриваемого транспортного средства в соответствии с командами, отправляемыми из устройства 160 управления, которое описывается ниже. Другие известные способы также могут использоваться в качестве способа управления движением посредством устройства 150 управления вождением.
[0017] Устройство 160 управления состоит из постоянного запоминающего устройства (ROM), которое сохраняет программы для управления движением рассматриваемого транспортного средства, центрального процессора (CPU), который выполняет программы, сохраненные в ROM, и оперативного запоминающего устройства (RAM), которое служит в качестве доступного устройства хранения данных. В качестве замены или в дополнение к CPU, также может использоваться микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) и т.п. в качестве функциональной схемы.
[0018] Устройство 160 управления выполняет программы, сохраненные в ROM, с использованием CPU, чтобы за счет этого достигать следующих различных функций: функции получения информации рассматриваемого транспортного средства для получения информации относительно рассматриваемого транспортного средства; функция получения информации окружающих условий для получения результатов обнаружения датчика 110 обнаружения окружающих условий; функции поиска намеченного пути для поиска запланированного намеченного пути движения рассматриваемого транспортного средства; функции указания пешеходного перехода для указания пешеходного перехода, через который предположительно должно проезжать рассматриваемое транспортное средство, в качестве целевого пешеходного перехода; функции обнаружения конфигурации дороги для обнаружения конфигураций дорог, ближайших к целевому пешеходному переходу; функции оценки линии движения для оценки линии движения движущегося объекта на основе обнаруженных конфигураций дорог; функции задания областей обнаружения для задания области обнаружения на основе линии движения движущегося объекта; функции обнаружения движущихся объектов для обнаружения движущегося объекта в области обнаружения; и функции управления движением для управления движением рассматриваемого транспортного средства на основе результата обнаружения движущегося объекта. Ниже описываются эти функции устройства 160 управления.
[0019] Функция получения информации рассматриваемого транспортного средства устройства 160 управления представляет собой функцию, допускающую получение информации относительно рассматриваемого транспортного средства в качестве информации рассматриваемого транспортного средства. В частности, устройство 160 управления может использовать функцию получения информации рассматриваемого транспортного средства для того, чтобы получать информацию скорости транспортного средства для рассматриваемого транспортного средства из датчика 120 скорости транспортного средства в качестве информации рассматриваемого транспортного средства. Помимо этого или альтернативно, устройство 160 управления может использовать функцию получения информации рассматриваемого транспортного средства для того, чтобы получать информацию относительно текущей позиции рассматриваемого транспортного средства из устройства 130 обнаружения позиции рассматриваемого транспортного средства в качестве информации рассматриваемого транспортного средства.
[0020] Функция получения информации окружающих условий устройства 160 управления представляет собой функцию, допускающую получение результатов обнаружения датчика 110 обнаружения окружающих условий в качестве информации окружающих условий. Например, устройство 160 управления может использовать функцию получения информации окружающих условий для того, чтобы получать информацию изображений за пределами транспортного средства, захваченную посредством камеры переднего вида и камеры заднего вида, и/или результаты обнаружения посредством переднего радара, заднего радара и боковых радаров в качестве информации окружающих условий. Помимо этого или альтернативно, устройство 160 управления может использовать функцию получения информации окружающих условий для того, чтобы выполнять анализ изображений для информации изображений, получаемой из камер, и/или выполнять процесс кластеризации для получения информации облаков точек, обнаруженной посредством радаров, за счет этого получая информацию относительно позиции и/или скорости перемещения объекта, присутствующего рядом с рассматриваемым транспортным средством и т.д., в качестве информации окружающих условий.
[0021] Функция поиска намеченного пути устройства 160 управления представляет собой функцию, допускающую поиск запланированного намеченного пути движения рассматриваемого транспортного средства. Например, когда водитель вводит место назначения через устройство ввода (не проиллюстрировано), устройство 160 управления может использовать функцию поиска намеченного пути для того, чтобы выполнять поиск запланированного намеченного пути движения рассматриваемого транспортного средства на основе пункта назначения, введенного водителем, картографической информации, сохраненной в базе 140 данных, и позиционной информации рассматриваемого транспортного средства, обнаруженной посредством устройства 130 обнаружения позиции рассматриваемого транспортного средства. База 140 данных согласно настоящему варианту осуществления сохраняет информацию соединений каждой полосы движения, как проиллюстрировано на фиг. 2. Соединение или соединения каждой полосы движения предварительно взвешиваются в соответствии с проезжаемым расстоянием, дорожной ситуацией и т.д. полосы движения (например, взвешивание соединений увеличивается по мере того, как увеличивается расстояние, или ухудшается дорожная ситуация). Устройство 160 управления может использовать функцию поиска намеченного пути для того, чтобы указывать полосу движения, которая является подходящей для намеченного пути движения из текущей позиции рассматриваемого транспортного средства в место назначения, например, и корректировать взвешивание соединений указанной полосы движения. Например, когда правый поворот требуется для того, чтобы прибывать к месту назначения, взвешивание соединений полосы движения для правого поворота может корректироваться на уменьшение. Затем устройство 160 управления может использовать функцию поиска намеченного пути для того, чтобы выполнять поиск запланированного намеченного пути движения, который представляет собой намеченный путь на уровне полосы движения, на котором общая сумма взвешивания соединений является минимальной в полосе движения, из текущей позиции рассматриваемого транспортного средства в место назначения, с использованием алгоритма поиска по графу, к примеру, алгоритма Дейкстры или алгоритма A* (A-звезда).
[0022] Функция указания пешеходного перехода устройства 160 управления представляет собой функцию, допускающую указание пешеходного перехода, через который предположительно должно проезжать рассматриваемое транспортное средство, в качестве целевого пешеходного перехода на основе запланированного намеченного пути движения, поиск которого выполняется с использованием функции поиска намеченного пути, и картографической информации, сохраненной в базе 140 данных. Например, устройство 160 управления может использовать функцию указания пешеходного перехода для того, чтобы обращаться к картографической информации, сохраненной в базе 140 данных, за счет этого получая информацию области пешеходного перехода, представленную посредством многоугольной формы. После этого, когда соединение полосы движения, представляющей запланированный намеченный путь движения рассматриваемого транспортного средства, пересекается с областью пешеходного перехода, устройство 160 управления может указывать пешеходный переход в качестве целевого пешеходного перехода с использованием функции указания пешеходного перехода. Например, в примере, проиллюстрированном на фиг. 2, соединение LA1 полосы A1 движения, представляющей запланированный намеченный путь движения рассматриваемого транспортного средства, пересекается с областью RB1 пешеходного перехода B1, и пешеходный переход B1 в силу этого указывается в качестве целевого пешеходного перехода.
[0023] Способ указания целевого пешеходного перехода не ограничен вышеописанным способом. Например, когда соединение полосы движения, определенной в качестве запланированного намеченного пути движения рассматриваемого транспортного средства, пересекается с соединением пешеходного перехода, устройство 160 управления может указывать пешеходный переход в качестве целевого пешеходного перехода с использованием функции указания пешеходного перехода. В примере, проиллюстрированном на фиг. 2, соединение LA1 полосы A1 движения, представляющей запланированный намеченный путь движения рассматриваемого транспортного средства, пересекается с соединением LB1 пешеходного перехода B1, и устройство 160 управления может следовательно указывать пешеходный переход B1 в качестве целевого пешеходного перехода с помощью функции указания пешеходного перехода. Помимо этого или альтернативно, устройство 160 управления может быть выполнено с возможностью использовать функцию указания пешеходного перехода для того, чтобы получать изображение, захваченное впереди рассматриваемого транспортного средства, из камеры, которая захватывает изображения впереди рассматриваемого транспортного средства V1, и выполнять анализ изображений, чтобы за счет этого указывать целевой пешеходный переход.
[0024] Функция обнаружения дорожных конфигураций устройства 160 управления представляет собой функцию, допускающую обнаружение дорожных конфигураций около целевого пешеходного перехода, таких как тротуары, придорожные полосы, пешеходные переходы и разделительные полосы, из результатов обнаружения датчика 110 обнаружения окружающих условий или картографической информации, полученной из базы 140 данных. Например, в примере, проиллюстрированном на фиг. 2, устройство 160 управления может использовать функцию обнаружения дорожных конфигураций для того, чтобы обнаруживать тротуар SW и придорожную полосу SS около целевого пешеходного перехода B1 в качестве дорожных конфигураций около целевого пешеходного перехода.
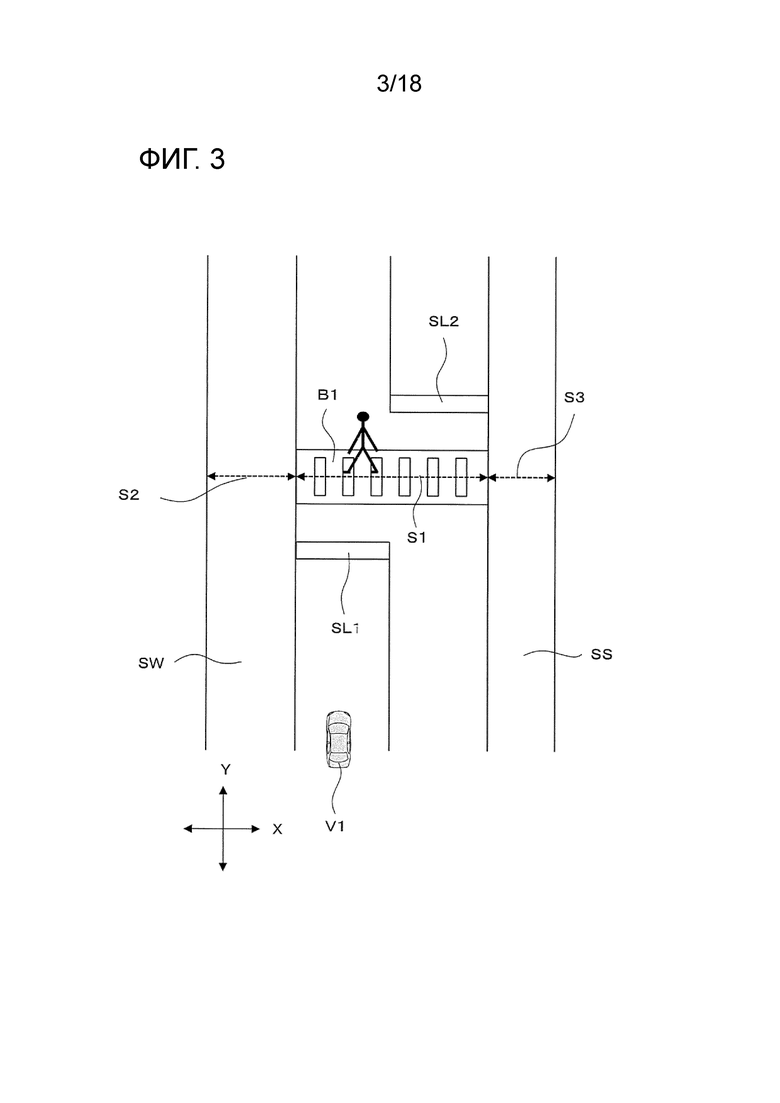
[0025] Функция оценки линий движения устройства 160 управления представляет собой функцию, допускающую оценку, на целевом пешеходном переходе, линии движения (которая означает линию, представляющую направление/частоту перемещения человека или объекта) движущегося объекта (движущегося тела, пересекающего пешеходный переход, такого как пешеход или велосипед), пересекающего целевой пешеходный переход, на основе дорожных конфигураций, обнаруженных с использованием функции обнаружения дорожных конфигураций. В настоящем варианте осуществления, как проиллюстрировано на фиг. 3, устройство 160 управления может использовать функцию оценки линий движения для того, чтобы оценивать то, что движущийся объект пересекает целевой пешеходный переход, и оценивать линию S1 движения движущегося объекта на целевом пешеходном переходе.
[0026] Помимо этого или альтернативно, устройство 160 управления может использовать функцию оценки линий движения для того, чтобы оценивать, на тротуаре или в придорожной полосе, линию движения движущегося объекта, ожидающего на тротуаре или в придорожной полосе для пересечения целевого пешеходного перехода, на основе дорожных конфигураций, обнаруженных с использованием функции обнаружения дорожных конфигураций. Например, как проиллюстрировано на фиг. 3, устройство 160 управления может использовать функцию оценки линий движения для того, чтобы оценивать то, что движущийся объект перемещается в направлении длины (направлении по оси Х) целевого пешеходного перехода от концевой части тротуара SW или придорожной полосы SS, расположенной напротив целевого пешеходного перехода B1, до целевого пешеходного перехода и оценивать линию S2 движения или S3 движущегося объекта, ожидающего на тротуаре или в придорожной полосе.
[0027] Функция задания областей обнаружения устройства 160 управления представляет собой функцию, допускающую задание области обнаружения для обнаружения движущегося объекта на основе линии движения движущегося объекта, оцененной с использованием функции оценки линий движения. Ниже описываются подробности способа задания области обнаружения с использованием функции задания областей обнаружения.
[0028] Функция обнаружения движущихся объектов устройства 160 управления представляет собой функцию, допускающую обнаружение движущегося объекта в области обнаружения, которая задается с использованием функции задания областей обнаружения. В частности, устройство 160 управления может использовать функцию обнаружения движущихся объектов для того, чтобы обнаруживать движущийся объект с использованием только результата обнаружения в области RT обнаружения, из числа результатов обнаружения, обнаруженных посредством датчика 110 обнаружения окружающих условий рядом с рассматриваемым транспортным средством.
[0029] Функция управления движением устройства 160 управления представляет собой функцию, допускающую управление движением в режиме автоматизированного вождения рассматриваемого транспортного средства. В частности, устройство 160 управления может использовать функцию управления движением для того, чтобы автоматически выполнять операцию вождения, которая обычно выполняется водителем, через операцию с устройством 150 управления вождением таким образом, чтобы управлять приводными механизмами, такими как двигатель и тормоз, и механизмом рулевого управления, таким как актуатор рулевого управления, на основе результатов обнаружения датчика 110 обнаружения окружающих условий и данных условий движения (к примеру, правил дорожного движения и запланированного намеченного пути движения). Например, устройство 160 управления может использовать функцию управления движением для того, чтобы выполнять управление удержанием на полосе движения, которое управляет позицией движения рассматриваемого транспортного средства в направлении ширины через операцию с устройством 150 управления вождением таким образом, чтобы управлять работой актуатора рулевого управления и т.п. таким образом, что рассматриваемое транспортное средство движется в некоторой полосе движения. Помимо этого или альтернативно, устройство 160 управления может использовать функцию управления движением для того, чтобы выполнять управление движением в режиме "ехать за", которое предназначено для автоматического следования за едущим впереди транспортным средством, через операцию с устройством 150 управления вождением таким образом, чтобы управлять работой приводных механизмов, таких как двигатель и тормоз, так что рассматриваемое транспортное средство движется с некоторым расстоянием от едущего впереди транспортного средства. Помимо этого или альтернативно, устройство 160 управления может использовать функцию управления движением для того, чтобы автоматически выполнять правый или левый поворот на перекрестке, смену полосы движения, парковку, остановку и другие необходимые операции, через управление приводными механизмами, такими как двигатель и тормоз, и механизмом рулевого управления, таким как актуатор рулевого управления, на основе результатов обнаружения датчика 110 обнаружения окружающих условий и данных условий движения. Например, в настоящем варианте осуществления, когда движущийся объект обнаруживается в области обнаружения с использованием функции обнаружения движущихся объектов, устройство 160 управления может использовать функцию управления движением для того, чтобы управлять приводными механизмами, такими как двигатель и тормоз, чтобы за счет этого останавливать рассматриваемое транспортное средство перед пешеходным переходом.
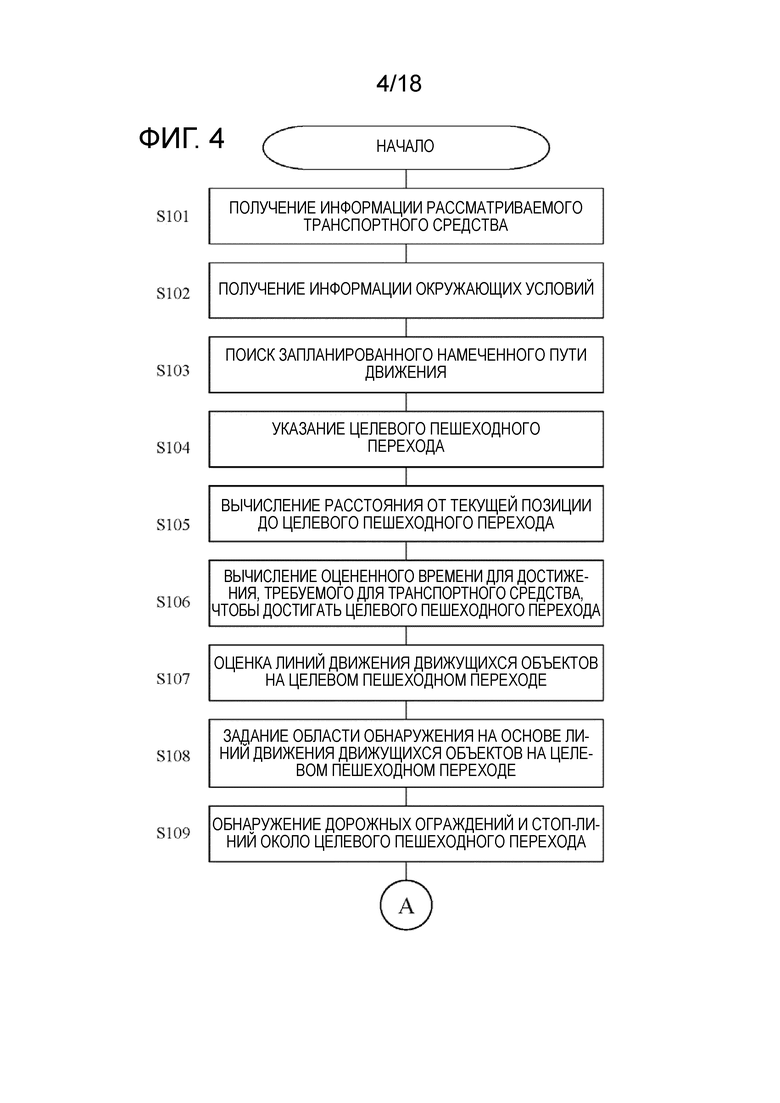
[0030] Далее описывается процесс управления движением согласно первому варианту осуществления со ссылкой на фиг. 4 и фиг. 5. Фиг. 4 и фиг. 5 являются блок-схемами последовательности операций способа, иллюстрирующей пример процесса управления движением согласно первому варианту осуществления. Процесс управления движением, описанный ниже, выполняется посредством устройства 160 управления. Процесс управления движением, описанный ниже, выполняется многократно через регулярные временные интервалы.
[0031] Во-первых, на этапе S101, функция получения информации рассматриваемого транспортного средства служит для того, чтобы получать информацию рассматриваемого транспортного средства, которая включает в себя информацию скорости транспортного средства и информацию позиции. На этапе S102, функция получения информации окружающих условий служит для того, чтобы получать результаты обнаружения датчика 110 обнаружения окружающих условий в качестве информации окружающих условий.
[0032] На этапе S103, функция поиска намеченного пути служит для того, чтобы выполнять поиск запланированного намеченного пути движения рассматриваемого транспортного средства. Например, когда водитель вводит место назначения через устройство ввода (не проиллюстрировано), устройство 160 управления может использовать функцию поиска намеченного пути для того, чтобы выполнять поиск намеченного пути на уровне полосы движения, на котором рассматриваемое транспортное средство движется в место назначения, в качестве запланированного намеченного пути движения на основе картографической информации, сохраненной в базе 140 данных.
[0033] На этапе S104, функция указания пешеходного перехода служит для того, чтобы указывать целевой пешеходный переход. Например, когда запланированный намеченный путь движения, поиск которого выполняется на этапе S103, пересекается с областью пешеходного перехода, включенного в картографическую информацию, сохраненную в базе 140 данных, устройство 160 управления может использовать функцию указания пешеходного перехода для того, чтобы указывать пешеходный переход в качестве целевого пешеходного перехода.
[0034] На этапе S105, функция задания областей обнаружения служит для того, чтобы вычислять расстояние от текущей позиции рассматриваемого транспортного средства до целевого пешеходного перехода. Расстояние от текущей позиции рассматриваемого транспортного средства до целевого пешеходного перехода может представлять собой расстояние от текущей позиции рассматриваемого транспортного средства до концевой части целевого пешеходного перехода на стороне рассматриваемого транспортного средства или расстояние от текущей позиции рассматриваемого транспортного средства до центральной позиции в направлении ширины целевого пешеходного перехода, или расстояние от текущей позиции рассматриваемого транспортного средства до позиции узла целевого пешеходного перехода.
[0035] Например, устройство 160 управления может использовать функцию задания областей обнаружения для того, чтобы получать общую сумму длин соединений, существующих от текущей позиции рассматриваемого транспортного средства до целевого пешеходного перехода, за счет этого вычисляя расстояние от текущей позиции рассматриваемого транспортного средства до целевого пешеходного перехода. Когда узел не существует на целевом пешеходном переходе или в текущей позиции рассматриваемого транспортного средства, либо когда ошибка в определенное значение или более возникает между длиной соединений с целевым пешеходным переходом и фактическим расстоянием перемещения рассматриваемого транспортного средства вследствие кривой и т.п., длина центральной линии полосы движения, в которой движется рассматриваемое транспортное средство от текущей позиции рассматриваемого транспортного средства до целевого пешеходного перехода, может вычисляться на основе картографической информации, чтобы за счет этого вычислять расстояние от текущей позиции рассматриваемого транспортного средства до целевого пешеходного перехода. В другой конфигурации, если картографическая информация не включает в себя информацию относительно центральной линии полосы движения, средняя линия полосы движения может от правой и левой граничных линий полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство. В еще одной другой конфигурации, расстояние от текущей позиции рассматриваемого транспортного средства до целевого пешеходного перехода может вычисляться посредством вычисления центральной линии дороги, по которой движется рассматриваемое транспортное средство, а не посредством вычисления центральной линии полосы движения.
[0036] На этапе S106, функция задания областей обнаружения служит для того, чтобы вычислять оцененное время для достижения от текущей позиции рассматриваемого транспортного средства до целевого пешеходного перехода на основе расстояния до целевого пешеходного перехода, вычисленного на этапе S105. Например, когда расстояние от текущей позиции рассматриваемого транспортного средства до целевого пешеходного перехода составляет D, оцененное время T для достижения до целевого пешеходного перехода может вычисляться как T=D/V... (1) при условии, что рассматриваемое транспортное средство движется с текущей скоростью V транспортного средства, которая представляет собой постоянную скорость.
[0037] Помимо этого или альтернативно, устройство 160 управления может использовать функцию задания областей обнаружения для того, чтобы вычислять оцененное время T для достижения до целевого пешеходного перехода с учетом того, что скорость транспортного средства должна уменьшаться, когда запланированный намеченный путь движения рассматриваемого транспортного средства идет под уклон, или кривизна является большой. Например, устройство 160 управления может использовать функцию задания областей обнаружения для того, чтобы вычислять большее оцененное время T для достижения до целевого пешеходного перехода по мере того, как уклон на запланированном намеченном пути движения рассматриваемого транспортного средства больше, или кривизна больше. В альтернативном варианте осуществления, устройство 160 управления может использовать функцию задания областей обнаружения для того, чтобы вычислять оцененное время T для достижения до целевого пешеходного перехода с использованием разрешенной скорости VL на дороге, по которой движется рассматриваемое транспортное средство, в качестве замены для текущей скорости V рассматриваемого транспортного средства в вышеуказанном уравнении (1).
[0038] На этапе S107, функция оценки линий движения служит для того, чтобы оценивать линию движения движущегося объекта на целевом пешеходном переходе. Например, как проиллюстрировано на фиг. 2, устройство 160 управления может использовать функцию оценки линий движения для того, чтобы оценивать то, что движущийся объект пересекает целевой пешеходный переход, и оценивать линию S1 движения движущегося объекта на целевом пешеходном переходе.
[0039] На этапе S108, функция задания областей обнаружения служит для того, чтобы задавать область обнаружения на основе линии движения движущегося объекта, которая задается на этапе S107. В частности, устройство 160 управления использует функцию задания областей обнаружения для того, чтобы задавать область, в которой линия движения движущегося объекта оценивается на целевом пешеходном переходе, в качестве области обнаружения. Устройство 160 управления может использовать функцию задания областей обнаружения для того, чтобы задавать область целевого пешеходного перехода B1 в качестве области RT обнаружения, как проиллюстрировано на фиг. 6, поскольку, на этапе S107, линия движения движущегося объекта оценивается на целевом пешеходном переходе.
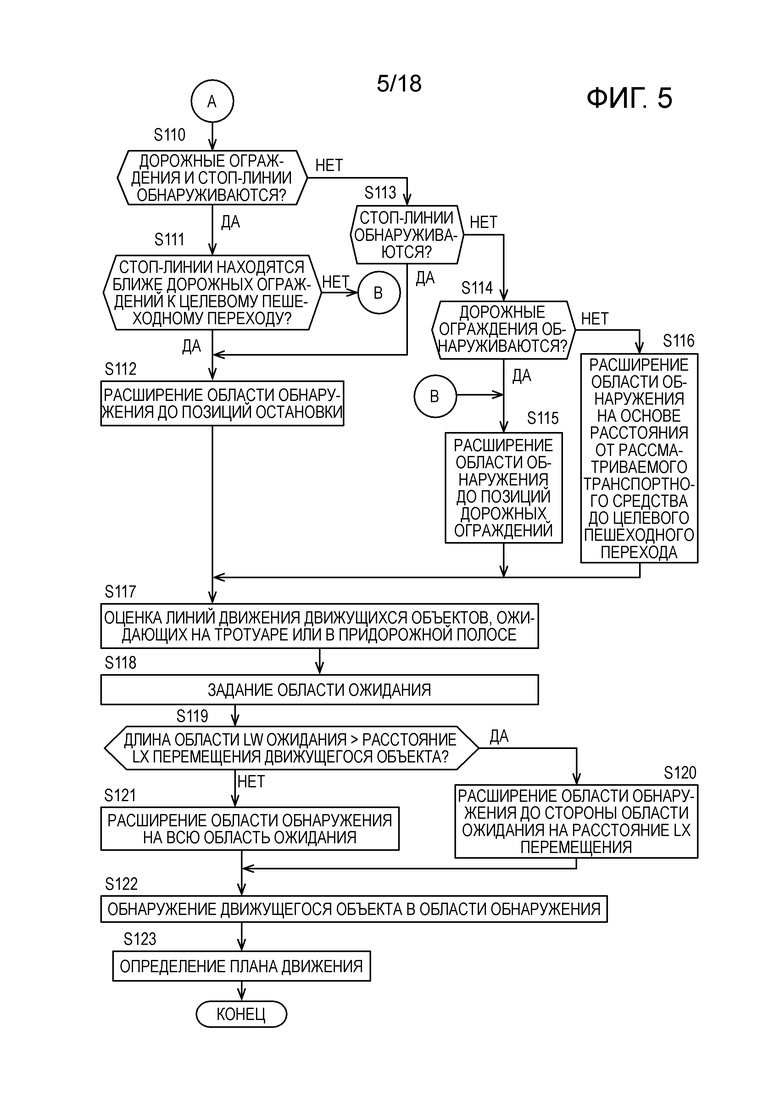
[0040] На этапе S109, функция задания областей обнаружения служит для того, чтобы обнаруживать дорожное ограждение и стоп-линию около целевого пешеходного перехода. После этапа S109 выполняется этап S110 по фиг. 5, на котором функция задания областей обнаружения служит для того, чтобы определять то, могут или нет обнаруживаться дорожное ограждение и стоп-линия около целевого пешеходного перехода, на основе результатов обнаружения этапа S109. Когда дорожное ограждение и стоп-линия около целевого пешеходного перехода могут обнаруживаться, процедура переходит к этапу S111, тогда как, когда дорожное ограждение и стоп-линия не могут обнаруживаться, процедура переходит к этапу S113.
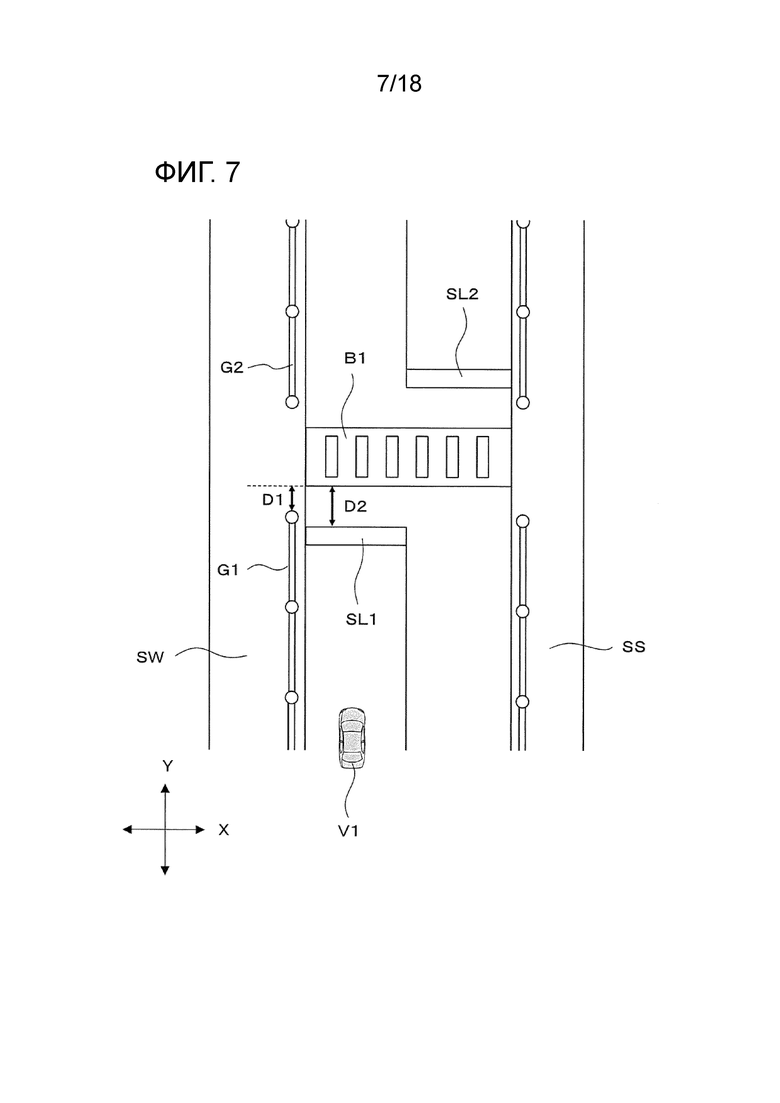
[0041] На этапе S111, функция задания областей обнаружения служит для того, чтобы определять то, стоп-линия находится ближе или нет дорожного ограждения к целевому пешеходному переходу, поскольку дорожное ограждение и стоп-линия около целевого пешеходного перехода обнаруживаются. Фиг. 7 является схемой для описания способа задания области обнаружения, когда существуют дорожные ограждения и стоп-линии. Например, в примере, проиллюстрированном на фиг. 7, устройство 160 управления использует функцию задания областей обнаружения для того, чтобы сравнивать расстояние D1 от целевого пешеходного перехода B1 до дорожного ограждения G1 с расстоянием D2 от целевого пешеходного перехода B1 до стоп-линии SL1. В примере, проиллюстрированном на фиг. 7, расстояние D1 меньше расстояния D2, и устройство 160 управления в силу этого определяет то, что дорожное ограждение G1 ближе стоп-линии SL1 к целевому пешеходному переходу B1, с использованием функции задания областей обнаружения. Когда выполняется определение в отношении того, что стоп-линия ближе дорожного ограждения к целевому пешеходному переходу, процедура переходит к этапу S112, тогда как, когда выполняется определение в отношении того, что дорожное ограждение ближе стоп-линии к целевому пешеходному переходу, процедура переходит к S115.
[0042] Когда, на этапе S110, выполняется определение в отношении того, что и дорожное ограждение и стоп-линия не могут обнаруживаться, процедура переходит к этапу S113. На этапе S113, функция задания областей обнаружения служит для того, чтобы определять то, обнаруживается или нет стоп-линия около целевого пешеходного перехода, на основе результатов обнаружения этапа S109. Когда стоп-линия обнаруживается, процедура переходит к этапу S112, тогда как, когда стоп-линия не обнаруживается, процедура переходит к этапу S114.
[0043] На этапе S114, функция задания областей обнаружения служит для того, чтобы определять то, обнаруживается или нет дорожное ограждение около целевого пешеходного перехода, на основе результатов обнаружения этапа S109. Когда дорожное ограждение обнаруживается, процедура переходит к этапу S115, тогда как, когда дорожное ограждение не обнаруживается, т.е. когда ни стоп-линия, ни дорожное ограждение не обнаруживаются, процедура переходит к этапу S116.
[0044] Когда дорожное ограждение и стоп-линия около целевого пешеходного перехода обнаруживаются, и выполняется определение в отношении того, что стоп-линия ближе дорожного ограждения к целевому пешеходному переходу (этап S110="Да", и этап S111="Да"), либо когда только стоп-линия около целевого пешеходного перехода обнаруживается (этап S113="Да"), процедура переходит к этапу S112.
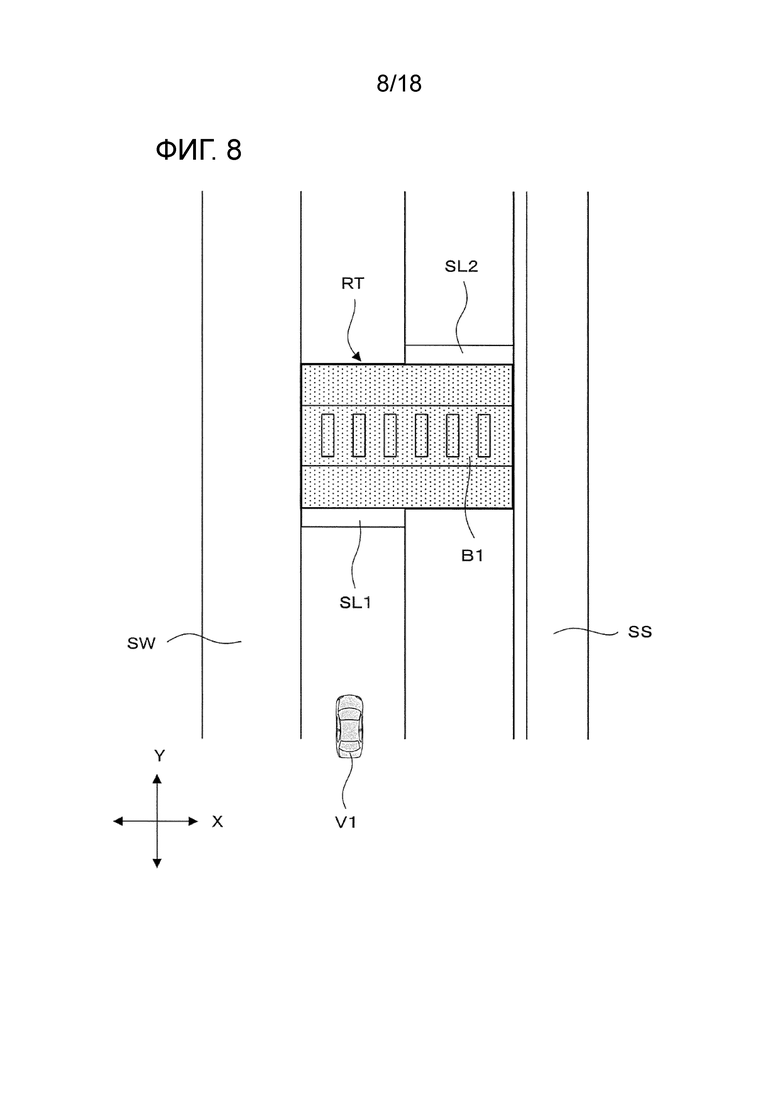
На этапе S112, функция задания областей обнаружения служит для того, чтобы расширять область обнаружения до позиции стоп-линии. Фиг. 8 является схемой, иллюстрирующей пример области обнаружения, когда существуют стоп-линии. В примере, проиллюстрированном на фиг. 8, только стоп-линии SL1 и SL2 около целевого пешеходного перехода B1 обнаруживаются, и устройство 160 управления в силу этого использует функцию задания областей обнаружения для того, чтобы расширять область RT обнаружения до позиций стоп-линий SL1 и S2 в направлении ширины (направлении по оси Y) целевого пешеходного перехода B1.
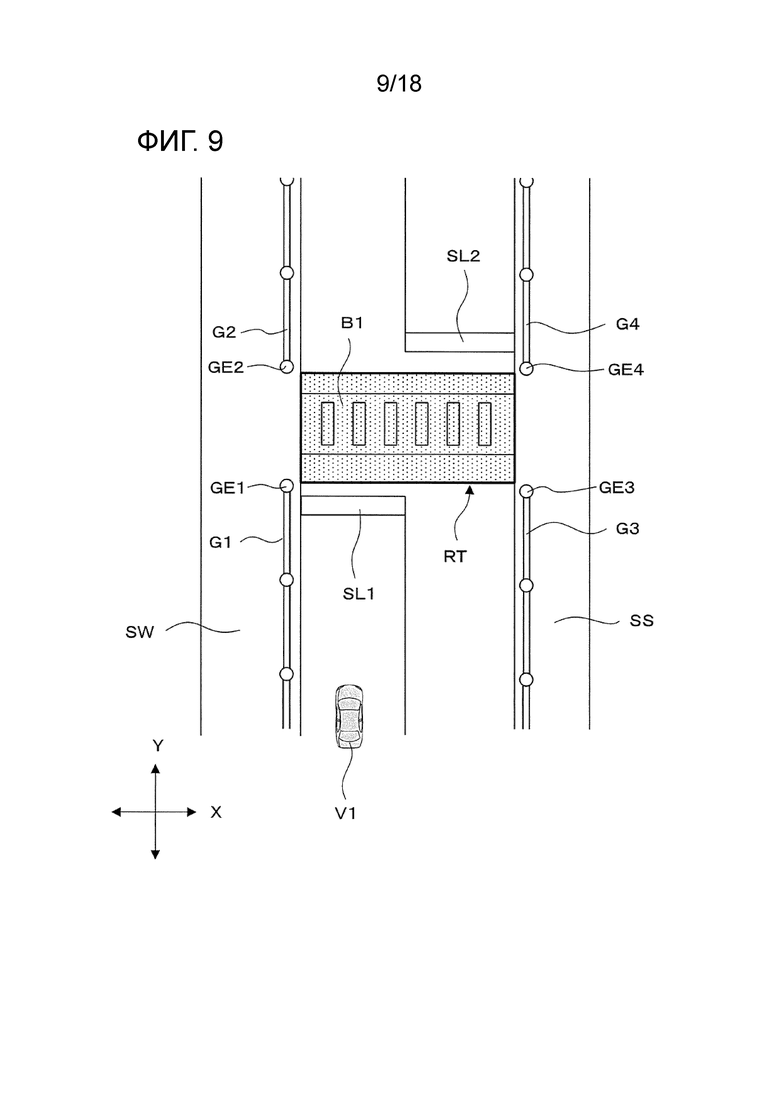
[0045] С другой стороны, когда дорожное ограждение и стоп-линия около целевого пешеходного перехода обнаруживаются, и выполняется определение в отношении того, что, дорожное ограждение ближе стоп-линии к целевому пешеходному переходу (этап S110="Да" и этап S111="Нет"), либо когда только дорожное ограждение около целевого пешеходного перехода обнаруживается (этап S114="Да"), процедура переходит к этапу S115. На этапе S115, функция задания областей обнаружения служит для того, чтобы расширять область обнаружения в направлении ширины целевого пешеходного перехода до позиции концевой части дорожного ограждения на стороне целевого пешеходного перехода. Фиг. 9 является схемой для описания способа задания области обнаружения в окружении, проиллюстрированном на фиг. 7. Как проиллюстрировано на фиг. 7, расстояние D1 от целевого пешеходного перехода B1 до дорожного ограждения G1 меньше расстояния D2 от целевого пешеходного перехода B1 до стоп-линии SL1. Аналогично, расстояния от целевого пешеходного перехода B1 до дорожных ограждений G2-G4 меньше расстояний от целевого пешеходного перехода B1 до стоп-линий SL1 и SL2. Функция задания областей обнаружения в силу этого служит для того, чтобы расширять область RT обнаружения в направлении ширины (направлении по оси Y) целевого пешеходного перехода B1 до концевых частей GE1-GE4 дорожных ограждений G1 и G2 на стороне целевого пешеходного перехода B1.
[0046] Когда ни дорожное ограждение, ни стоп-линия около целевого пешеходного перехода не обнаруживаются (этап S114="Нет"), процедура переходит к этапу S116. На этапе S116, функция задания областей обнаружения служит для того, чтобы расширять область обнаружения на основе расстояния от рассматриваемого транспортного средства до целевого пешеходного перехода. Фиг. 10(A) иллюстрирует пример взаимосвязи между расстоянием от рассматриваемого транспортного средства до целевого пешеходного перехода и точностью обнаружения датчика 110 обнаружения окружающих условий. Как проиллюстрировано на фиг. 10(A), по мере того, как расстояние от рассматриваемого транспортного средства до целевого пешеходного перехода увеличивается, точность обнаружения датчика 110 обнаружения окружающих условий ухудшается для окрестности целевого пешеходного перехода. Устройство 160 управления в силу этого использует функцию задания областей обнаружения для того, чтобы расширять область обнаружения в направлении ширины целевого пешеходного перехода по мере того, как расстояние от целевого пешеходного перехода до рассматриваемого транспортного средства увеличивается (когда расстояние от целевого пешеходного перехода до рассматриваемого транспортного средства составляет предварительно определенное расстояние или больше, расширять область обнаружения по сравнению с тем, когда расстояние от целевого пешеходного перехода до рассматриваемого транспортного средства меньше предварительно определенного расстояния). Например, в примере, проиллюстрированном на фиг. 10(B), расстояние от целевого пешеходного перехода B1 до рассматриваемого транспортного средства V1 превышает расстояние в примере, проиллюстрированном на фиг. 10(C), так что устройство 160 управления использует функцию задания областей обнаружения для того, чтобы расширять область RT обнаружения в направлении ширины (направлении по оси Y) целевого пешеходного перехода B1. Таким образом, даже когда расстояние от рассматриваемого транспортного средства до целевого пешеходного перехода является большим, движущийся объект может стабильно обнаруживаться с учетом точности обнаружения датчика 110 обнаружения окружающих условий, чтобы задавать область обнаружения. В другой конфигурации, функция задания областей обнаружения может служить для того, чтобы расширять область RT обнаружения в направлении ширины (направлении по оси Y) целевого пешеходного перехода B1 на расстояние, полученное посредством умножения расстояния от целевого пешеходного перехода B1 до рассматриваемого транспортного средства V1 на предварительно определенную константу пропорциональности.
[0047] На этапе S117, функция оценки линий движения служит для того, чтобы оценивать линию движения движущегося объекта, ожидающего в дорожной конфигурации около целевого пешеходного перехода до пересечения целевого пешеходного перехода. Например, в примере, проиллюстрированном на фиг. 3, устройство 160 управления может использовать функцию оценки линий движения для того, чтобы оценивать линии S2 и S3 движения движущегося объекта, ожидающего на тротуаре SW или в придорожной полосе SS, при условии, что движущийся объект перемещается в направлении длины (направлении по оси Х) целевого пешеходного перехода B1 по ширине тротуара SW и ширине придорожной полосы SS.
[0048] Также может быть возможность того, что движущийся объект, пересекающий целевой пешеходный переход B1, ожидает в позиции, отклоняющейся поперечно от целевого пешеходного перехода B1 (на фиг. 11, например, в позиции на верхней стороне или нижней стороне целевого пешеходного перехода B1) на тротуаре или в придорожной полосе около целевого пешеходного перехода. Устройство 160 управления в силу этого может использовать функцию оценки линий движения для того, чтобы оценивать линию движения движущегося объекта в диапазоне, который не превышает стоп-линию и дорожное ограждение в области тротуара или придорожной полосы около целевого пешеходного перехода. Например, в примере, проиллюстрированном на фиг. 11, устройство 160 управления может использовать функцию оценки линий движения для того, чтобы оценивать линии S21-S23 или S31-S33 движения движущихся объектов в конкретной области в области тротуара SW или придорожной полосы SS около области RT обнаружения. Конкретная область представляет собой область, которая находится в направлении ширины (направлении по оси Y) целевого пешеходного перехода B1 в позиции ближе к целевому пешеходному переходу B1 из числа позиций стоп-линий SL1 и SL2 и дорожных ограждений G1-G4, и которая находится в направлении длины (направлении по оси Х) целевого пешеходного перехода B1 от области RT обнаружения до концевой части тротуара SW или придорожной полосы SS. Через эту операцию, в примере, проиллюстрированном на фиг. 11, линии S21-S23 движения движущихся объектов оцениваются в области RW1 между дорожными ограждениями G1 и G2 на тротуаре SW, и линии S31-S33 движения движущихся объектов оцениваются в области RW2 между дорожными ограждениями G3 и G4 в придорожной полосе SS.
[0049] На этапе S118, функция задания областей обнаружения служит для того, чтобы задавать область тротуара или придорожной полосы, которая оценивается для линий движения движущихся объектов на этапе S117, в качестве области ожидания. Например, в примере, проиллюстрированном на фиг. 11, области RW1 и RW2 тротуара SW и придорожной полосы SS, оцененные на этапе S117 для линий движения движущихся объектов, задаются в качестве области ожидания.
[0050] На этапе S119, функция задания областей обнаружения служит для того, чтобы сравнивать длину LW области ожидания, которая задается на этапе S118 в направлении длины целевого пешеходного перехода, с расстоянием LX перемещения, на которое перемещается движущийся объект до тех пор, пока рассматриваемое транспортное средство не достигнет целевого пешеходного перехода. Во-первых, устройство 160 управления использует функцию задания областей обнаружения для того, чтобы получать скорость перемещения движущегося объекта, сохраненную в ROM устройства 160 управления. Например, устройство 160 управления может использовать функцию задания областей обнаружения для того, чтобы получать среднюю скорость Vp перемещения (например, 80 м/мин) пешехода, сохраненную в ROM устройства 160 управления, в качестве скорости перемещения движущегося объекта. Скорость перемещения движущегося объекта не ограничена средней скоростью перемещения пешехода, и, например, средняя скорость перемещения велосипеда также может использоваться в качестве скорости перемещения движущегося объекта. На пешеходном переходе с частым трафиком пожилых пешеходов, средняя скорость перемещения пешехода, к примеру, пожилого пешехода, имеющего относительно низкую скорость перемещения, может использоваться в качестве скорости перемещения движущегося объекта. Затем устройство 160 управления использует функцию задания областей обнаружения для того, чтобы умножать время T для достижения, которое вычисляется на этапе S106 для рассматриваемого транспортного средства, чтобы достигать целевого пешеходного перехода, на скорость Vp перемещения движущегося объекта, за счет этого вычисляя расстояние LX перемещения (LX=T x Vp), на которое перемещается движущийся объект до тех пор, пока рассматриваемое транспортное средство не достигнет целевого пешеходного перехода.
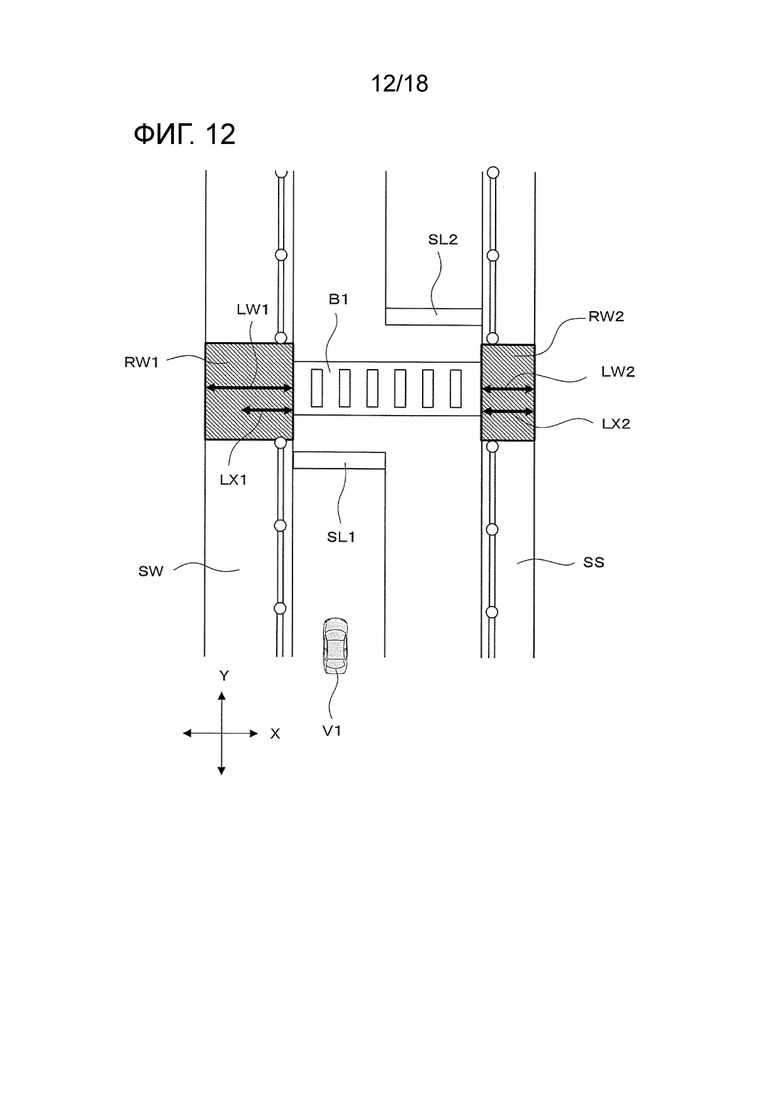
[0051] Затем устройство 160 управления использует функцию задания областей обнаружения для того, чтобы сравнивать длину LW области ожидания в направлении длины целевого пешеходного перехода с расстоянием LX перемещения, на которое перемещается движущийся объект до тех пор, пока рассматриваемое транспортное средство не достигнет целевого пешеходного перехода. Например, в примере, проиллюстрированном на фиг. 12, длина LW1 области RW1 ожидания превышает расстояние LX1 перемещения, на которое перемещается движущийся объект до тех пор, пока рассматриваемое транспортное средство V1 не достигнет целевого пешеходного перехода B1. С другой стороны, длина LW2 области RW2 ожидания представляет собой длину, идентичную расстоянию LX2 перемещения, на которое перемещается движущийся объект до тех пор, пока рассматриваемое транспортное средство V1 не достигнет целевого пешеходного перехода B1.
[0052] Когда, на этапе S119, длина LW области ожидания превышает расстояние перемещения движущегося объекта, процедура переходит к этапу S120. На этапе S120, функция задания областей обнаружения служит для того, чтобы расширять область обнаружения в направлении длины целевого пешеходного перехода до позиции в области ожидания, удаленной от целевого пешеходного перехода на расстояние LX перемещения. Например, в примере, проиллюстрированном на фиг. 12, длина LW1 области RW1 ожидания превышает расстояние LX1 перемещения движущегося объекта, и устройство 160 управления в силу этого использует функцию задания областей обнаружения для того, чтобы расширять область RT обнаружения, как проиллюстрировано на фиг. 13, в направлении длины (направлении по оси Х) целевого пешеходного перехода B1 до позиции P1 в области RW1 ожидания, удаленной от целевого пешеходного перехода B1 на расстояние LX перемещения.
[0053] С другой стороны, когда, на этапе S119, длина LW области ожидания не превышает расстояние LX перемещения движущегося объекта, процедура переходит к этапу S121. На этапе S121, функция задания областей обнаружения служит для того, чтобы расширять область обнаружения на всю область ожидания. Например, в примере, проиллюстрированном на фиг. 12, длина LW2 области RW2 ожидания представляет собой длину, идентичную расстоянию LX2 перемещения движущегося объекта, и функция задания областей обнаружения в силу этого служит для того, чтобы расширять область RT обнаружения на всю область RW2 ожидания.
[0054] На этапе S122, функция обнаружения движущихся объектов служит для того, чтобы обнаруживать движущийся объект в области обнаружения, расширенной на этапе S120 или этапе S121. Затем, на этапе S123, функция управления движением служит для того, чтобы определять план движения рассматриваемого транспортного средства на основе результатов обнаружения движущегося объекта на этапе S122 и выполнять управление движением. Например, в настоящем варианте осуществления, когда движущийся объект обнаруживается в области обнаружения, управление выполняется для того, чтобы останавливать рассматриваемое транспортное средство перед целевым пешеходным переходом.
[0055] Как описано выше, в первом варианте осуществления, пешеходный переход, через который предположительно должно проезжать рассматриваемое транспортное средство, указывается в качестве целевого пешеходного перехода, и дорожная конфигурация около целевого пешеходного перехода обнаруживается. Затем линия движения движущегося объекта, пересекающего целевой пешеходный переход, оценивается на основе дорожной конфигурации около целевого пешеходного перехода. Дополнительно, область, включающая в себя оцененную линию движения движущегося объекта, задается в качестве области обнаружения, и движущийся объект обнаруживается в области обнаружения. Таким образом, в первом варианте осуществления, линия движения движущегося объекта, пересекающего целевой пешеходный переход, оценивается на основе дорожной конфигурации около целевого пешеходного перехода, и область, в которой движущийся объект с большой вероятностью должен перемещаться при пересечении целевого пешеходного перехода, в силу этого может задаваться в качестве области обнаружения. Движущийся объект, пересекающий целевой пешеходный переход, в силу этого может надлежащим образом обнаруживаться. Кроме того, область, в которой движущийся объект с большой вероятностью должен перемещаться при пересечении целевого пешеходного перехода, задается в качестве области обнаружения, и точность в обнаружении движущегося объекта в силу этого может повышаться по сравнению с тем, когда движущийся объект обнаруживается во всей области рядом с рассматриваемым транспортным средством.
[0056] Кроме того, в настоящем варианте осуществления, тротуар и придорожная полоса около целевого пешеходного перехода обнаруживаются в качестве дорожной конфигурации около пешеходного перехода, и за счет этого можно надлежащим образом обнаруживать не только движущийся объект, пересекающий целевой пешеходный переход, но также и движущийся объект, ожидающий на тротуаре или в придорожной полосе около целевого пешеходного перехода, чтобы пересекать целевой пешеходный переход.
[0057] В настоящем варианте осуществления, как проиллюстрировано на фиг. 12, расстояние LX перемещения, на которое перемещается движущийся объект до тех пор, пока рассматриваемое транспортное средство V1 не достигнет целевого пешеходного перехода B1, вычисляется на основе скорости перемещения движущегося объекта. Затем область RT обнаружения расширяется на конкретную область для области RW1 или RW2 ожидания, в которой оценивается линия движения движущегося объекта, ожидающего в дорожной конфигурации SW или SS. Конкретная область представляет собой область, в которой расстояние от целевого пешеходного перехода B1 составляет расстояние LX перемещения или меньше. Таким образом, область, в которой движущийся объект может достигать целевого пешеходного перехода B1 до того, как рассматриваемое транспортное средство V1 достигает целевого пешеходного перехода B1, задается в качестве области RT обнаружения, и за счет этого можно обнаруживать движущийся объект, который может приближаться вплотную к рассматриваемому транспортному средству V1, когда рассматриваемое транспортное средство V1 достигает целевого пешеходного перехода B1.
[0058] В настоящем варианте осуществления, как проиллюстрировано на фиг. 8, когда стоп-линии SL1 и SL2 существуют перед целевым пешеходным переходом B1, область RT обнаружения расширяется в направлении ширины (направлении по оси Y) целевого пешеходного перехода B1 до позиций стоп-линий SL1 и SL2. Через эту операцию, движущиеся объекты, перемещающиеся между целевым пешеходным переходом и стоп-линиями, могут надлежащим образом обнаруживаться. В настоящем варианте осуществления, как проиллюстрировано на фиг. 7, когда дорожные ограждения G1-G4 предоставляются на тротуаре SW и в придорожной полосе SS около целевого пешеходного перехода B1, область RT обнаружения расширяется в направлении ширины (направлении по оси Y) целевого пешеходного перехода B1 до позиций, соответствующих концевым частям GE1-GE4 дорожных ограждений G1-G4 на стороне целевого пешеходного перехода B1. Это предоставляет возможность соответствующего обнаружения движущихся объектов, которые пересекают области между дорожными ограждениями и целевым пешеходным переходом при отклонении от целевого пешеходного перехода.
[0059] Второй вариант осуществления
Далее описывается аппарат управления движением для транспортного средства согласно второму варианту осуществления настоящего изобретения. Аппарат 100 управления движением для транспортного средства согласно второму варианту осуществления имеет конфигурацию, идентичную конфигурации в первом варианте осуществления, за исключением того, что он работает следующим образом.
[0060] Устройство 160 управления согласно второму варианту осуществления имеет функцию определения вероятности пересечения для определения того, возможно или нет пересечение на смежном пешеходном переходе около целевого пешеходного перехода, и функцию задания областей слияния для задания области в дорожной конфигурации, в которой движущийся объект перемещается к целевому пешеходному переходу, в качестве области слияния, в дополнение к функциям первого варианта осуществления.
[0061] Функция определения вероятности пересечения представляет собой функцию, допускающую определение того, возможно или нет пересечение на смежном пешеходном переходе около целевого пешеходного перехода. Например, устройство 160 управления может использовать функцию определения вероятности пересечения для того, чтобы получать захваченное изображение светофора для транспортных средств, предоставленных перед целевым пешеходным переходом, из камеры, присоединяемой к рассматриваемому транспортному средству. Затем устройство 160 управления может использовать функцию определения вероятности пересечения для того, чтобы определять сигнал светофора для транспортных средств, расположенных перед целевым пешеходным переходом, на основе полученного захваченного изображения, чтобы определять сигнал светофора для пешеходов, который предоставляется на смежном пешеходном переходе. Например, когда сигнал светофора для транспортных средств представляет собой сигнал, который разрешает транспортным средствам двигаться, функция определения вероятности пересечения может служить для того, чтобы определять то, что невозможно пересечение на смежном пешеходном переходе. Наоборот, когда сигнал светофора для транспортных средств представляет собой сигнал, который запрещает транспортным средствам двигаться, функция определения вероятности пересечения может служить для того, чтобы определять то, что возможно пересечение на смежном пешеходном переходе. Затем, когда выполняется определение в отношении того, что возможно пересечение на смежном пешеходном переходе, функция задания областей обнаружения может служить для того, чтобы задавать область, включающую в себя область смежного пешеходного перехода, в качестве области обнаружения. С другой стороны, когда выполняется определение в отношении того, что невозможно пересечение на смежном пешеходном переходе, функция задания областей обнаружения может служить для того, чтобы задавать область, которая не включает в себя область смежного пешеходного перехода, в качестве области обнаружения.
[0062] Функция задания областей слияния устройства 160 управления представляет собой функцию, допускающую задание области в дорожной конфигурации, когда движущийся объект перемещается к целевому пешеходному переходу, в качестве области слияния. В частности, устройство 160 управления может использовать функцию задания областей слияния сначала для того, чтобы оценивать линию движения движущегося объекта, который перемещается на тротуаре, в придорожной полосе, в разделительной полосе или на смежном пешеходном переходе около целевого пешеходного перехода. Фиг. 14 является схемой, иллюстрирующей примеры линий движения в дорожной конфигурации движущихся объектов, которые перемещаются к целевому пешеходному переходу. Например, в примере, проиллюстрированном на фиг. 14, устройство 160 управления может использовать функцию задания областей слияния для того, чтобы оценивать линии S4 и S5 движения на тротуаре SW около целевого пешеходного перехода B1 и оценивать линию S6 движения на разделительной полосе M и смежном пешеходном переходе B2.
[0063] Затем устройство 160 управления может использовать функцию задания областей слияния для того, чтобы задавать область в дорожной конфигурации, в которой движущийся объект перемещается к целевому пешеходному переходу, в качестве области слияния на основе линии движения движущегося объекта в дорожной конфигурации. В частности, устройство 160 управления может использовать функцию задания областей слияния для того, чтобы умножать оцененное время T для достижения, которое требуется для рассматриваемого транспортного средства, чтобы достигать целевого пешеходного перехода, на скорость Vp перемещения движущегося объекта, как представлено посредством вышеуказанного уравнения (1), с тем чтобы вычислять расстояние LX перемещения, на которое перемещается движущийся объект до тех пор, пока рассматриваемое транспортное средство не достигнет целевого пешеходного перехода. Затем устройство 160 управления может использовать функцию задания областей слияния для того, чтобы задавать конкретную область для области тротуара SW, придорожной полосы, разделительной полосы и смежного пешеходного перехода около целевого пешеходного перехода, в качестве области слияния. Конкретная область представляет собой область, в которой расстояние от целевого пешеходного перехода вдоль линии движения движущегося объекта равно или меньше расстояния LX перемещения, на которое перемещается движущийся объект до тех пор, пока рассматриваемое транспортное средство не достигнет целевого пешеходного перехода.
[0064] Например, в примере, проиллюстрированном на фиг. 15, предполагается, что длины линий S4-S6 движения движущихся объектов представляют расстояние LX перемещения, на которое перемещается каждый движущийся объект до тех пор, пока рассматриваемое транспортное средство не достигнет целевого пешеходного перехода. В этом случае, как проиллюстрировано на фиг. 15, устройство 160 управления может использовать функцию задания областей слияния для того, чтобы задавать конкретную область RF1 тротуара SW около целевого пешеходного перехода B1 в качестве области слияния. Конкретная область RF1 представляет собой область, в которой расстояния от целевого пешеходного перехода B1 вдоль линий S4 и S5 движения движущихся объектов равны или меньше расстояния LX перемещения, на которое перемещается каждый движущийся объект до тех пор, пока рассматриваемое транспортное средство V1 не достигнет целевого пешеходного перехода B1. Помимо этого или альтернативно, устройство 160 управления может использовать функцию задания областей слияния для того, чтобы задавать конкретную область RF2 разделительной полосы M и смежного пешеходного перехода B2 около целевого пешеходного перехода B1 в качестве области слияния. Конкретная область RF2 представляет собой область, в которой расстояние от целевого пешеходного перехода B1 вдоль линии S6 движения движущегося объекта равно или меньше расстояния LX перемещения, на которое перемещается движущийся объект до тех пор, пока рассматриваемое транспортное средство V1 не достигнет целевого пешеходного перехода B1.
[0065] Когда движущийся объект не может пересекать смежный пешеходный переход в результате определения, выполненного с использованием функции определения вероятности пересечения, устройство 160 управления использует функцию задания областей слияния таким образом, чтобы не задавать область смежного пешеходного перехода в качестве области слияния. Например, в примере, проиллюстрированном на фиг. 15, часть смежного пешеходного перехода B2 попадает в диапазон расстояния LX перемещения от целевого пешеходного перехода B1, но выполняется определение в отношении того, что невозможно пересечение на смежном пешеходном переходе B2 в результате определения вероятности пересечения. Устройство 160 управления в силу этого использует функцию задания областей слияния для того, чтобы задавать только область разделительной полосы M в качестве области RF2 слияния таким образом, что область смежного пешеходного перехода B2 не включена в область RF2 слияния.
[0066] Функция задания областей обнаружения согласно второму варианту осуществления представляет собой функцию, допускающую задание области, содержащей область целевого пешеходного перехода и область слияния, в качестве области обнаружения. Например, в примере, проиллюстрированном на фиг. 16, устройство 160 управления может использовать функцию задания областей обнаружения для того, чтобы задавать область, которая включает в себя область RB1 целевого пешеходного перехода B1 и области RF1 и RF2 слияния, в качестве области обнаружения. Хотя не проиллюстрировано, когда возможно пересечение на смежном пешеходном переходе B2, в области смежного пешеходного перехода B2, область, в которой расстояние от целевого пешеходного перехода B1 составляет расстояние LX перемещения или меньше, также может быть включена в область RT обнаружения.
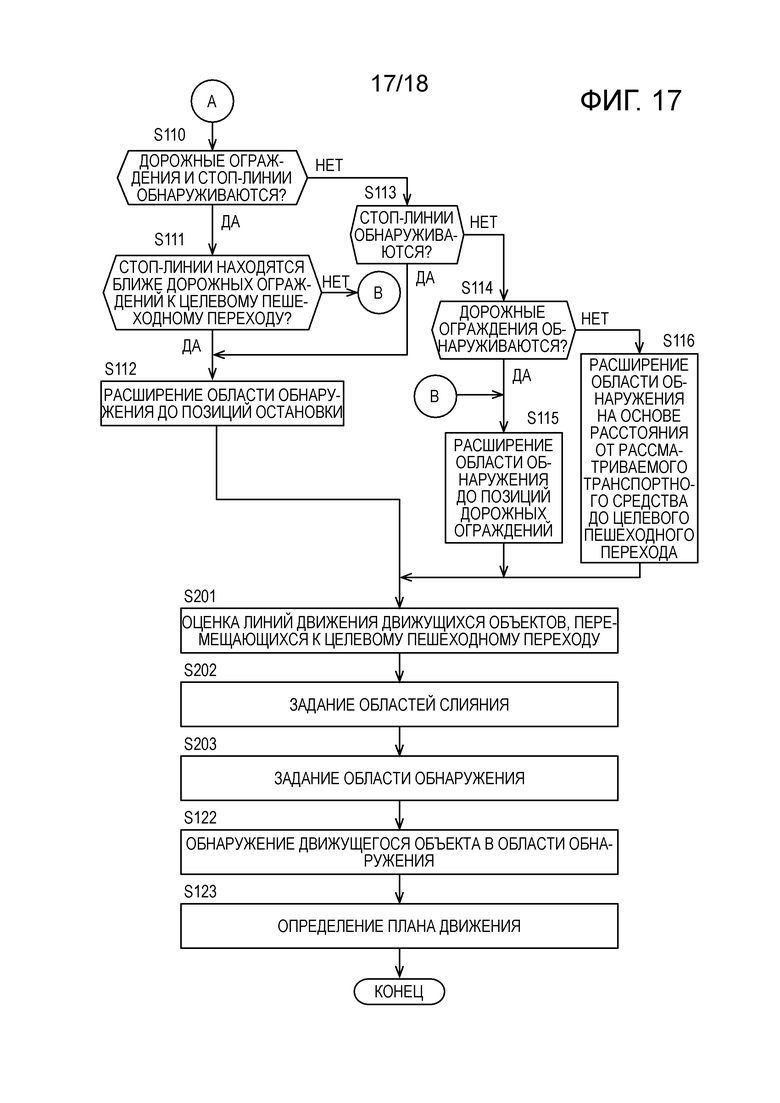
[0067] Со ссылкой на фиг. 17, далее описывается пример процесса управления движением согласно второму варианту осуществления. Процессы этапов S101-S116 выполняются идентично первому варианту осуществления, и описание опускается.
[0068] На этапе S201, функция задания областей слияния служит для того, чтобы оценивать линию движения движущегося объекта, перемещающегося к целевому пешеходному переходу, на основе дорожной конфигурации около целевого пешеходного перехода. Например, как проиллюстрировано на фиг. 14, устройство 160 управления может использовать функцию задания областей слияния для того, чтобы оценивать линии S4-S6 движения движущихся объектов, перемещающихся к целевому пешеходному переходу, на основе дорожной конфигурации около целевого пешеходного перехода.
[0069] На этапе S202, функция задания областей слияния служит для того, чтобы задавать область слияния на основе линии движения движущегося объекта, оцененной на этапе S201. Например, как проиллюстрировано на фиг. 15, устройство 160 управления может использовать функцию задания областей слияния для того, чтобы задавать конкретные области RF1 и RF2, которые представляют собой области вдоль линий S4-S6 движения движущихся объектов, перемещающихся к целевому пешеходному переходу B1, в качестве областей слияния. Конкретные области RF1 и RF2 представляют собой области, в которых расстояние от целевого пешеходного перехода B1 равно или меньше расстояния LX перемещения, на которое перемещается каждый движущийся объект до тех пор, пока рассматриваемое транспортное средство V1 не достигнет целевого пешеходного перехода B1. Когда движущийся объект не может пересекать смежный пешеходный переход B2, как проиллюстрировано на фиг. 15, устройство 160 управления использует функцию задания областей слияния таким образом, что она не включает в себя область смежного пешеходного перехода B2 в областях слияния.
[0070] На этапе S203, функция задания областей обнаружения служит для того, чтобы задавать область обнаружения. Во втором варианте осуществления, как проиллюстрировано на фиг. 16, устройство 160 управления использует функцию задания областей обнаружения для того, чтобы задавать область, содержащую область целевого пешеходного перехода B1 и области RF1 и RF2 слияния, заданные на этапе S202, в качестве области RT обнаружения.
[0071] Как описано выше, во втором варианте осуществления, конкретная область для области дорожной конфигурации (такая как тротуар, придорожная полоса, разделительная полоса или смежный пешеходный переход) около целевого пешеходного перехода задается в качестве области слияния. Конкретная область представляет собой область, в которой движущийся объект может достигать целевого пешеходного перехода до того, как рассматриваемое транспортное средство достигает целевого пешеходного перехода. Затем область, содержащая область целевого пешеходного перехода и область слияния, задается в качестве области обнаружения. Через эту операцию, помимо преимуществ первого варианта осуществления, получается такое преимущество, что может надлежащим образом обнаруживаться движущийся объект, который может приближаться вплотную к рассматриваемому транспортному средству на целевом пешеходном переходе, когда рассматриваемое транспортное средство достигает целевого пешеходного перехода.
[0072] Кроме того, в настоящем варианте осуществления, область разделительной полосы M, которая соединяется между целевым пешеходным переходом B1 и смежным пешеходным переходом B2, задается в качестве области RF2 слияния, как проиллюстрировано на фиг. 15, и в силу этого, также можно надлежащим образом обнаруживать движущийся объект, который перемещается на разделительной полосе к целевому пешеходному переходу. Кроме того, в настоящем варианте осуществления, движущийся объект, который перемещается на смежном пешеходном переходе к целевому пешеходному переходу, также может надлежащим образом обнаруживаться, поскольку область слияния может задаваться на смежном пешеходном переходе. Помимо этого, когда невозможно пересечение на смежном пешеходном переходе, область обнаружения задается таким образом, что она не включает в себя область смежного пешеходного перехода, чтобы за счет этого предоставлять возможность соответствующего обнаружения движущегося объекта, который может перемещаться к целевому пешеходному переходу, из числа движущихся объектов, существующих рядом с рассматриваемым транспортным средством.
[0073] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
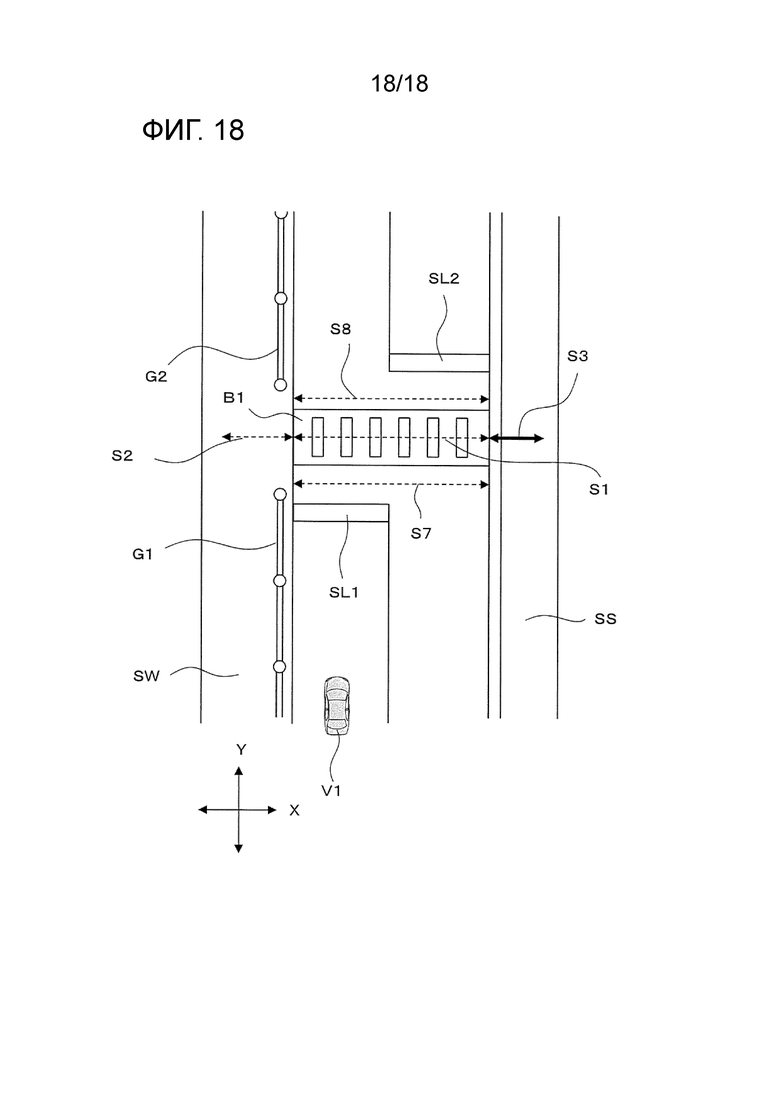
[0074] Например, в вышеописанных вариантах осуществления, примерно иллюстрируется конфигурация, в которой линия движения движущегося объекта на целевом пешеходном переходе оценивается при условии, что движущийся объект перемещается на целевом пешеходном переходе, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, линия движения движущегося объекта оценивается на или около целевого пешеходного перехода с учетом того, что движущийся объект может отклоняться поперечно от целевого пешеходного перехода и пересекать целевой пешеходный переход. Например, как проиллюстрировано на фиг. 18, функция оценки линий движения может иметь возможность оценивать линии S1-S3, S7 и S8 движения движущихся объектов при условии, что движущиеся объекты перемещаются в диапазоне, который не превышает стоп-линии SL1 и SL2, расположенные перед целевым пешеходным переходом B1, т.е. в диапазоне от целевого пешеходного перехода B1 до стоп-линий SL1 и SL2. Помимо этого или альтернативно, как проиллюстрировано на фиг. 18, когда дорожные ограждения G1 и G2 существуют на тротуаре SW или в придорожной полосе SS, функция оценки линий движения может иметь возможность оценивать линии S7 и S8 движения движущихся объектов при условии, что движущиеся объекты перемещаются на стороне целевого пешеходного перехода B1, чем дорожные ограждения G1 и G2. Помимо этого или альтернативно, когда стоп-линии SL1 и SL2 и дорожные ограждения G1 и G2 существуют, функция оценки линий движения может иметь возможность оценивать линии движения движущихся объектов при условии, что движущиеся объекты перемещаются в диапазоне от стоп-линий SL1 и SL2 и дорожных ограждений G1 и G2, которые ближе к целевому пешеходному переходу B1 к целевому пешеходному переходу B1. Например, в примере, проиллюстрированном на фиг. 18, дорожные ограждения G1 и G2 находятся ближе, чем стоп-линии SL1 и SL2, к целевому пешеходному переходу B1, и функция оценки линий движения в силу этого может служить для того, чтобы оценивать линии S7 и S8 движения движущихся объектов при условии, что движущиеся объекты перемещаются в диапазоне от целевого пешеходного перехода B1 до дорожных ограждений G1 и G2.
[0075] В вышеописанных вариантах осуществления, примерно иллюстрируется конфигурация, в которой расстояние перемещения для перемещения движущегося объекта до тех пор, пока рассматриваемое транспортное средство не достигнет целевого первого пешеходного перехода, вычисляется посредством получения скорости перемещения движущегося объекта, которая предварительно сохраняется в ROM устройства 160 управления, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой фактическая скорость перемещения движущегося объекта вычисляется посредством многократного обнаружения движущегося объекта, и расстояние перемещения для перемещения движущегося объекта до тех пор, пока рассматриваемое транспортное средство не достигнет целевого пешеходного перехода, вычисляется на основе вычисленной фактической скорости перемещения движущегося объекта.
[0076] В вышеописанном втором варианте осуществления, примерно иллюстрируется конфигурация, в которой, как проиллюстрировано на фиг. 16, область смежного пешеходного перехода B2 не задается в качестве области RT обнаружения, когда выполняется определение в отношении того, что движущийся объект не может пересекать смежный пешеходный переход B2, на основе индикатора сигнала светофора для светофора для транспортных средств, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, область целевого пешеходного перехода B1 не задается в качестве области RT обнаружения, когда выполняется определение в отношении того, что, движущийся объект не может перемещаться на целевом пешеходном переходе B1, на основе индикатора сигнала светофора для светофора для транспортных средств.
[0077] В вышеописанном втором варианте осуществления, примерно иллюстрируется конфигурация, в которой область, которая обеспечивает возможность движущемуся объекту перемещаться к целевому пешеходному переходу до тех пор, пока рассматриваемое транспортное средство не достигнет целевого пешеходного перехода, задается в качестве области слияния, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, предварительно определенная область дорожной конфигурации около целевого пешеходного перехода задается в качестве области слияния. Например, область до позиции стоп-линии дорожной конфигурации около целевого пешеходного перехода может задаваться в качестве области обнаружения.
[0078] В вышеописанных вариантах осуществления, примерно иллюстрируется конфигурация, в которой аппарат 100 управления движением включает в себя базу 140 данных, но аппарат 100 управления движением также может быть выполнен с возможностью принимать картографическую информацию из сервера, предоставленного за пределами транспортного средства. Настоящее изобретение не ограничено формой, в которой аппарат 100 управления движением оснащен в транспортном средстве. В аппарате 100 управления движением, например, устройство 160 управления или устройство 160 управления и база 140 данных могут предоставляться за пределами транспортного средства, и управление движением транспортного средства может выполняться посредством дистанционного управления.
[0079] В вышеописанных вариантах осуществления, датчик 110 обнаружения окружающих условий соответствует детектору настоящего изобретения, и устройство 160 управления соответствует контроллеру настоящего изобретения.
Описание номеров ссылок
[0080] 100 - Аппарат управления движением
110 - датчик обнаружения окружающих условий
120 - датчик скорости транспортного средства
130 - устройство обнаружения позиции рассматриваемого транспортного средства
140 - база данных
150 - устройство управления вождением
160 - устройство управления








Изобретение относится к способу и аппарату управления движением для транспортного средства. Способ управления движением для транспортного средства содержит этапы, на которых указывают пешеходный переход в качестве целевого пешеходного перехода, обнаруживают дорожную конфигурацию около целевого пешеходного перехода, оценивают линию движения движущегося объекта на основе дорожной конфигурации, задают область в качестве области обнаружения детектора, обнаруживающего объект рядом с рассматриваемым транспортным средством. При этом обнаруживают движущийся объект в области обнаружения с использованием детектора, управляют движением рассматриваемого транспортного средства на основе результата обнаружения детектора, вычисляют расстояние перемещения на основе скорости перемещения движущегося объекта и задают конкретную область в области оцененной линии движения в дорожной конфигурации в качестве области обнаружения. Аппарат управления движением содержит детектор, выполненный с возможностью обнаруживать окружающий объект, и контроллер, выполненный с возможностью управлять движением рассматриваемого транспортного средства на основе результата обнаружения детектора. Достигается повышение безопасности водителя транспортного средства. 2 н. и 7 з.п. ф-лы, 18 ил.
1. Способ управления движением для транспортного средства, содержащий этапы, на которых:
- указывают пешеходный переход, через который ожидается проезд рассматриваемого транспортного средства, в качестве целевого пешеходного перехода;
- обнаруживают дорожную конфигурацию около целевого пешеходного перехода;
- оценивают линию движения движущегося объекта, пересекающего целевой пешеходный переход, на основе дорожной конфигурации;
- задают область, включающую в себя оцененную линию движения, в качестве области обнаружения детектора, обнаруживающего объект рядом с рассматриваемым транспортным средством;
- обнаруживают движущийся объект в области обнаружения с использованием детектора; и
- управляют движением рассматриваемого транспортного средства на основе результата обнаружения детектора;
- вычисляют расстояние перемещения, на которое движущийся объект перемещается до тех пор, пока рассматриваемое транспортное средство не достигнет целевого пешеходного перехода, на основе скорости перемещения движущегося объекта; и
- задают конкретную область в области оцененной линии движения в дорожной конфигурации в качестве области обнаружения, причем конкретная область представляет собой область, в которой расстояние от целевого пешеходного перехода составляет расстояние перемещения или меньше вдоль линии движения, и имеет предварительно определенную ширину.
2. Способ управления движением для транспортного средства по п. 1, содержащий этапы, на которых:
- обнаруживают по меньшей мере одно из тротуара, придорожной полосы, пешеходного перехода и разделительной полосы около целевого пешеходного перехода, в качестве дорожной конфигурации.
3. Способ управления движением для транспортного средства по п. 1 или 2, содержащий этапы, на которых:
- задают область для ожидания движущегося объекта в дорожной конфигурации до пересечения целевого пешеходного перехода в качестве области ожидания на основе линии движения в дорожной конфигурации и
- задают конкретную область в области ожидания в качестве области обнаружения, причем конкретная область представляет собой область, в которой расстояние от целевого пешеходного перехода составляет расстояние перемещения или меньше.
4. Способ управления движением для транспортного средства по п. 1 или 2, в котором, когда расстояние от рассматриваемого транспортного средства до целевого пешеходного перехода составляет предварительно определенное расстояние или больше, область обнаружения расширяется в направлении ширины целевого пешеходного перехода по сравнению с тем, когда расстояние от рассматриваемого транспортного средства до целевого пешеходного перехода меньше предварительно определенного расстояния.
5. Способ управления движением для транспортного средства по п. 1 или 2, в котором, когда стоп-линия существует перед целевым пешеходным переходом, конкретная область, включающая в себя область от целевого пешеходного перехода до стоп-линии, задается в качестве области обнаружения.
6. Способ управления движением для транспортного средства по п. 1 или 2, в котором, когда дорожное ограждение предоставляется в дорожной конфигурации, конкретная область в области дороги, по которой движется транспортное средство, задается в качестве области обнаружения, при этом конкретная область включает в себя область от целевого пешеходного перехода до позиции концевой части дорожного ограждения на стороне целевого пешеходного перехода.
7. Способ управления движением для транспортного средства по п. 1 или 2, в котором, когда разделительная полоса существует между целевым пешеходным переходом и пешеходным переходом около пешеходного перехода, конкретная область, включающая в себя область разделительной полосы, задается в качестве области обнаружения.
8. Способ управления движением для транспортного средства по п. 1 или 2, содержащий этап, на котором:
- определяют то, следует или нет задавать конкретную область, включающую в себя область пешеходного перехода около целевого пешеходного перехода, в качестве области обнаружения, на основе индикатора сигнала светофора для светофора.
9. Аппарат управления движением, содержащий:
- детектор, выполненный с возможностью обнаруживать окружающий объект; и
- контроллер, выполненный с возможностью управлять движением рассматриваемого транспортного средства на основе результата обнаружения детектора,
- причем контроллер дополнительно выполнен с возможностью:
- указывать пешеходный переход, через который ожидается проезд рассматриваемого транспортного средства, в качестве целевого пешеходного перехода;
- обнаруживать дорожную конфигурацию около целевого пешеходного перехода;
- оценивать линию движения движущегося объекта, пересекающего целевой пешеходный переход, на основе дорожной конфигурации;
- задавать область, включающую в себя оцененную линию движения, в качестве области обнаружения детектора; и
- обнаруживать движущийся объект в области обнаружения;
- вычислять расстояние перемещения, на которое движущийся объект перемещается до тех пор, пока рассматриваемое транспортное средство не достигнет целевого пешеходного перехода, на основе скорости перемещения движущегося объекта; и
- задавать конкретную область в области оцененной линии движения в дорожной конфигурации в качестве области обнаружения, причем конкретная область представляет собой область, в которой расстояние от целевого пешеходного перехода составляет расстояние перемещения или меньше вдоль линии движения, и имеет предварительно определенную ширину.
| US 8666651 B2, 04.03.2013 | |||
| JP 5197679 B2, 15.05.2013 | |||
| JP 5004865 B2, 22.08.2012. |

