Изобретение относится к технике сканирующего зонда, а именно к мониторингу положения зонда с помощью оптических средств и может быть использовано в туннельной, атомно-силовой, емкостной и других видах сканирующей зондовой микроскопии.
Известна система обнаружения для динамического зонда [RU 2518859 C2, МПК G01Q20/02 (2010.01), опубл. 10.06.2014], содержащая источник света, чтобы создать луч для подсветки колебательного зонда, который периодически приближается к поверхности образца. Зонд содержит консоль (кантилевер) с основанием и свободными концами. Свободный конец консоли поддерживает острую иглу. Интерферометр выполнен с возможностью обнаружения разности хода между отраженным от зонда светом и опорным лучом высоты, и вывода сигнала высоты, указывающего эту разность хода. Устройство обработки сигнала выполнено с возможностью отслеживания сигнала высоты и извлечения данных из положения в пределах каждого цикла колебаний, который удовлетворяет заданным критериям измерения. Извлеченные данные используются для получения измерения для каждого цикла колебаний, которое указывает высоту зонда. Система обнаружения может также включать в себя механизм обратной связи, который действует для поддержания среднего значения параметра обратной связи на заданном уровне.
Известно устройство для измерения величин прогиба и разворота кантилевера в сканирующем силовом микроскопе [RU 50340 U1, МПК G01В7/34 (2000.01), опубл. 27.12.2005], содержащее электрически связанные фотодетектор, блок предварительных усилителей и блок сумматора. Вход блока обработки сигналов через блок предварительных усилителей подключен к входу фотодетектора. Выход блока обработки сигналов подключен к блоку сумматора, что позволяет производить усиление полезных сигналов и снизить уровень шума в выходном сигнале, вычитая шумы из сигналов, поступающих на блок сумматора, и таким образом улучшить точность микроскопа.
Известно устройство для измерения частоты колебаний мультикантилевера [RU 2313141 C2, МПК G12В21/08 (2006.01), опубл. 20.12.2007], содержащего множество кантилеверов, имеющих различные длины и различные собственные частоты, и расположенных группами по радиусам от спирального основания. Устройство содержит средство для одновременного возбуждения собственных колебаний кантилеверов постоянным световым возбуждением и интерферометр для измерения колебаний. Данное устройство обнаруживает взаимодействие между образцом и зондом для самовозбуждения собственных частот кантилеверов.
Известно устройство компенсации колебаний консоли зонда атомно-силового микроскопа [RU2456622 C1, МПК G01Q60/24 (2010.01), опубл. 20.07.2012],содержащее датчик положения консоли, генератор колебаний консоли, а также датчик определения резонансной компоненты сигнала, которые используются для компенсации резонансной частоты колебаний в масштабе реального времени для получения лучшего изображения.
В атомно-силовом микроскопе исследуемый образец устанавливают на столике, который перемещается в плоскости XY, а сканирование осуществляют в режиме постоянной силы, когда оптический датчик положения консоли и датчик определения резонансной компоненты сигнала оценивают значение частоту колебаний консоли при действии неравномерностей поверхности. Данные, связанные с перемещением зонда по Z координате используют для отображения профиля поверхности. Наилучшие условия реализации измерения создают регулировкой зазора между остриём иглы и поверхностью с помощью генератора колебаний консоли. В процессе сканирования поверхности образца консоль (кантилевер) с иглой на конце одновременно перемещается и колеблется. Изгиб консоли пропорционален силе, действующей со стороны поверхности на иглу. Частота, амплитуда и фаза колебаний зонда зависят от силового взаимодействия с поверхностью. При изменении параметров взаимодействия игла может смещаться относительно поверхности по любой из координат в плоскости XY. При этом собственные колебания иглы в двумерной плоскости сканирования XY являются высокочастотными, ввиду малого размера иглы и сильно отличаются от частоты одномерных (по вертикальной оси Z) колебаний консоли.
Отсутствие контроля колебаний иглы и их компенсации в процессе сканированияне только вызывает размытие сигнала измерения, и, как следствие, ухудшение качества изображения поверхности образца, и даже к жёсткому контакту иглы с поверхностью в плоскости XY, что ведёт к износу или повреждению иглы и необходимости её замены, что является дорогостоящей операцией. Кроме того, износ или повреждение иглы зонда влияет на её размер (длину и массу), а вместе с ним и массу консоли, внося значительную погрешность в определение координат расположения неравномерности на двумерной плоскости сканирования (XY) иглой зонда и в итоге снижает достоверность результата измерения и надёжность зонда.
Техническим результатом предложенного изобретения является создание устройства, позволяющего компенсировать в реальном времени X и Y составляющие сигнала измерения, вносимые собственными колебаниями иглы зонда, не связанными с колебаниями консоли.
Устройство компенсации собственных колебаний иглы зонда сканирующего микроскопа, также как в прототипе, содержит генератор колебаний.
Согласно изобретению в качестве генератора колебаний выбран генератор сигнала частоты собственных колебаний иглы, закрепленной на свободном конце нижней поверхности консоли, верхняя поверхность которой расположена в активной зоне датчика положения консоли. Входы синхронных детекторов сигнала координаты Х и сигнала координаты Y, а также входы сумматоров сигнала координаты Х и сигнала координаты Y подключены к выходам датчика положения консоли. Управляющие входы синхронных детекторов сигнала координаты Х и сигнала координаты Y подключены к выходу генератора сигнала частоты колебаний иглы. Выход синхронного детектора сигнала координаты Х через сумматор сигнала координаты Х связан со входом X устройства перемещения образца, а выход синхронного детектора сигнала координаты Y через сумматор сигнала координаты Y связан с входом Y устройства перемещения образца.
Устройство позволяет контролировать состояние иглы и обеспечивает формирование сигнала, в котором из общего сигнала датчика положения консоли исключены собственные колебания иглы по координатам Х и Y, то есть реализует возможность синхронного исключения ошибок измерения по координатам X и Y, возникающих из-за пространственной осцилляции кончика иглы зонда, вызванной действием собственных резонансных колебаний иглы с одновременным измерением характеристик сигнала зонда в любой точке поверхности образца без влияния на соседние участки сканирования. Такая компенсация сигнала собственных колебаний иглы, обусловленного прецессией иглы относительно положения её равновесия, позволяет варьировать в более широком диапазоне зазор «игла–поверхность», устанавливая в реальном времени необходимое значение зазора с учётом положения иглы, тем самым уменьшить размытие изображения поверхности и исключать её жесткий контакт с поверхностью. Совокупным результатом является повышение точности измерения неравномерности поверхности и надёжности зонда.
Таким образом, в отличие от прототипа, предложенное устройство снижает ошибки измерения неравномерности поверхности, улучшает точность и достоверность измерения рельефа поверхности образца сканирующим микроскопом путём компенсации составляющей размытия сигнала зонда, чем повышает надёжность зонда атомно-силового микроскопа.
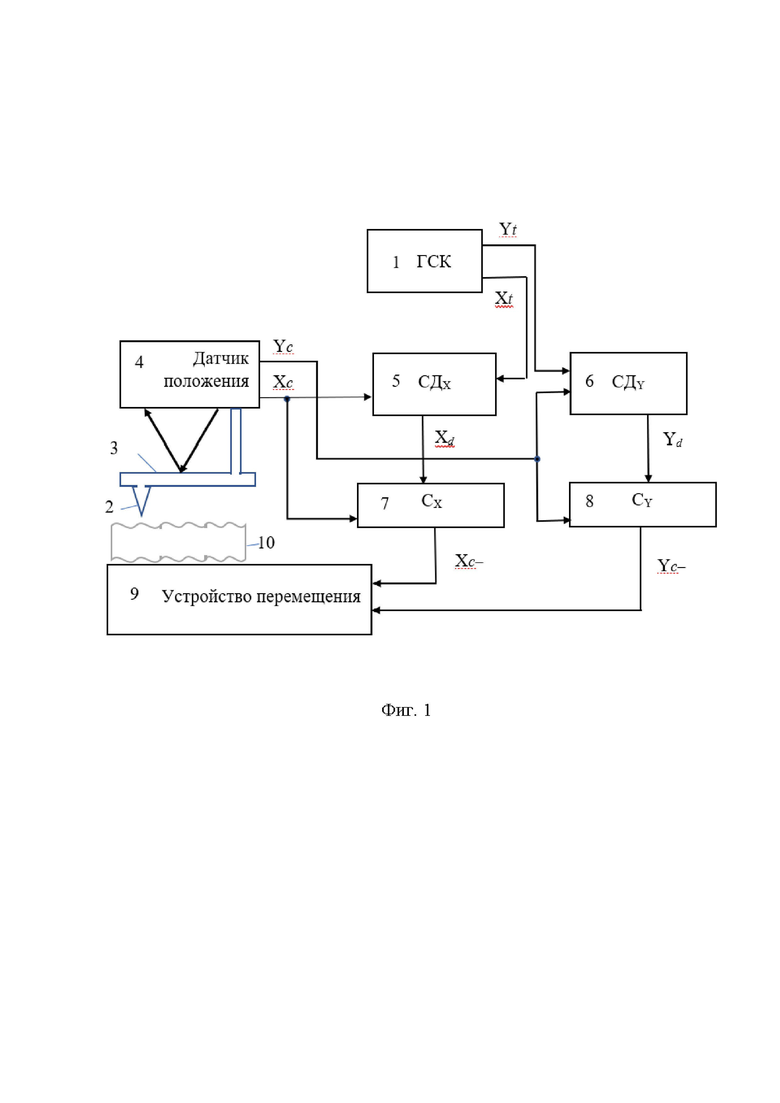
На фиг. 1 представлена функциональная схема устройства компенсации собственных колебаний иглы зонда сканирующего микроскопа.
Устройство компенсации собственных колебаний иглы зонда сканирующего микроскопа содержит генератор сигнала частоты собственных колебаний 1 (ГСК) иглы 2,жёстко закрепленной на свободном конце нижней поверхности консоли3 зонда. Консоль3расположенаверхней поверхностью к активной зоне датчика положения 4консоли 3. К выходам X и Y датчика положения 4 консоли 3 подключены соответствующие им сигнальные входы синхронного детектора сигнала координаты Х 5 (СДX) и синхронного детектора сигнала координаты Y 6 (СДY), а также входы сумматора сигнала координаты Х 7 (СX) и сумматора сигнала координаты Y8 (СY). Управляющие входы синхронных детекторов сигнала координаты Х 5 (СДX) и сигнала координаты Y6 (СДY), подключены к выходу генератора сигнала частоты колебаний 1 (ГСК) иглы 2.Выход синхронного детектора сигнала координаты Х 5(СДX) через сумматор сигнала координаты Х 7 (СX) связан с входом X устройства перемещения 9 образца 10.Синхронный детектор сигнала координаты Y6 (СДY), через сумматор сигнала координаты Y8 (СY) связан с входом устройства перемещения 9 образца 10.
Например, для атомно-силового микроскопа Park Systems консоль 3, изготовлена из нитрида кремния (Si3N4), датчик положения4 консоли 3 является зондовым датчиком PSF00,а в качестве генератора сигнала частоты собственных колебаний 1 (ГСК) иглы 2может быть использован генератор, выполненный на элементах АГ3интегральной микросхемы серии 533, собранных по схеме мультивибратора (ОСТ11 340.917-84;черт.202). Синхронные детекторы сигнала координаты X5 (СДX),координаты Y6 (СДY) и сумматоры сигнала координаты Х 7 (СX) и координаты Y8 (СY) выполнены на операционных усилителях УД1(2) серии 544.
Устройство компенсации влияния собственных колебаний иглы зонда работает следующим образом.
В начале работы вручную или электронной системой сканирующего микроскопа консоль 3 с жёстко закрепленной на его конце иглой 2 подводят к поверхности образца 10 для начала взаимодействия. При этом сближении датчик положения 4консоли 3непрерывно отслеживает изменение положения консоли 3 относительно поверхности образца 10 и формирует сигналы Хс и Yс, отражающие колебания консоли 3 по соответствующим осям координат Х и Y. Параметры сигнала, снимаемого с датчика положения 4 консоли 3, определяются типом зондового микроскопа. Данные положенияконсоли3 по координатам X и Y отдатчика положения 4консоли 3, поступают в виде электрических сигналов на сигнальные входы синхронных детекторов сигнала координаты X 5 (СДX) и координаты Y 6 (СДY), а также на прямые входы сумматоров сигнала координаты Х 7 (СX) и сигнала координаты Y 8 (СY). Одновременно на вторые инверсные входы сумматоров сигнала координаты Х 7 (СX) и координаты Y 8 (СY) поступают сигналы Хd и Yd с одноименных выходов синхронных детекторов сигнала координаты X 5(СДX) и координаты Y 6 (СДY), работа которых синхронизирована сигналами Хt и Yt генератора сигнала частоты собственных колебаний 1 (ГСК) иглы 2, подаваемых на вторые управляющие входы синхронных детекторов сигнала координаты X5 (СДX) и сигнала координаты Y 6 (СДY). Таким образом, сумматоры сигналов координаты Х 7 (СX) и координаты Y 8 (СДY) выполняют арифметическую операцию вычитания сигналов синхронных детекторов сигнала координаты X5(СДX) и сигнала координаты Y 6 (СДY) из соответствующих сигналов координат X и Y положения консоли 3, формируемых датчиком положения 4 консоли 3.Вычитание выходных сигналов синхронных детекторов сигналов координат X5 (СДX) и координаты Y 6 (СДY) производится для исключения влияния на сигнал зонда осцилляций частоты собственных колебаний иглы 2 в активной зоне действия сил межатомного или молекулярного взаимодействия иглы 2 с поверхностью образца 10. При этом учитываются параметры осцилляции иглы 2,и данные, полученные при исходной юстировке консоли 3 с иглой2, а также текущие значения сигналов координат X и Y датчика положения 4 консоли 3 в реальном времени, определяющие координаты положения X и Y свободного конца консоли 3,на котором закреплена игла 2. Формирование результирующего сигнала Хс- координаты X датчика положения 4 консоли 3 с исключённой частью сигнала, соответствующей собственным колебаниям иглы 2 по координате X, выполняет сумматор сигнала координаты Х 7 (СX), а формирование результирующего сигнала Yс- координаты Y датчика положения 4 консоли 3 с исключённой частью сигнала, соответствующей собственным колебаниям иглы 2 по координате Y – сумматор сигнала координаты Y 8 (СY).
Далее результирующие сигналы Хс- и Yс-, соответствующие координатам X и Y реального положения иглы 2, снимаемые с выходов сумматоров сигнала координаты Х 7 (СX) и координаты Y 8 (СY) передаются на входы устройства перемещения 9 образца 10соответствующих координатам X и Y сканирующего микроскопа. Эти сигналы координат X и Y с исключённой погрешностью, вносимой осцилляцией иглы 1 относительно её положения равновесия, служат основой построения карты высот в сканирующем микроскопе.
Предлагаемое устройство может быть использовано в системах сканирующей микроскопии для сканирования и коррекции искажений координат сигнала изображения поверхности, формируемого иглой зонда, в широком диапазоне изменения длин, скоростей и износа иглы в реальном времени. Регулировкой зазора между остриёмиглы1и поверхностью образца 10 создаются наилучшие условия реализации измерения.
Практическое использование предлагаемого устройства возможно во всех типах зондовой микроскопии ,в том числе, туннельной, атомно-силовой, емкостной, а также в автономных средствах измерения рельефа поверхностей и приборах неразрушающего контроля поверхностей; его применение повышает точность измерения и достоверность получаемых результатов, обеспечивая более высокую стабильность параметров микроскопов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗОНД ДЛЯ СКАНИРУЮЩЕЙ ЕМКОСТНОЙ МИКРОСКОПИИ | 2004 |
|
RU2289862C2 |
| Нанозонд сканирующего микроскопа | 2018 |
|
RU2687180C1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ПРИПОВЕРХНОСТНОГО МАГНИТНОГО ПОЛЯ С ИСПОЛЬЗОВАНИЕМ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2000 |
|
RU2193769C2 |
| БЛОК УПРАВЛЕНИЯ ДЛЯ СКАНИРУЮЩИХ ЗОНДОВЫХ МИКРОСКОПОВ | 2007 |
|
RU2428700C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ДЛЯ ДИНАМИЧЕСКОГО ЗОНДА | 2009 |
|
RU2518859C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП И СПОСОБ ВЫЯВЛЕНИЯ БЛИЗОСТИ ЕГО ЗОНДОВ | 2010 |
|
RU2526295C2 |
| КОМБИНИРОВАННЫЙ СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП - РАСТРОВЫЙ ЭЛЕКТРОННЫЙ МИКРОСКОП | 1994 |
|
RU2089968C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С НАНОТОМОМ | 2010 |
|
RU2427846C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2012 |
|
RU2572522C2 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ В СКАНИРУЮЩЕЙ ЗОНДОВОЙ МИКРОСКОПИИ | 2017 |
|
RU2698953C2 |
Изобретение относится к технике сканирующего зонда, а именно к мониторингу положения зонда с помощью оптических средств и может быть использовано в туннельной, атомно-силовой, емкостной и других видах сканирующей зондовой микроскопии. Устройство компенсации собственных колебаний иглы зонда сканирующего микроскопа содержит генератор сигнала частоты собственных колебаний иглы, закрепленной на свободном конце нижней поверхности консоли, верхняя поверхность которой расположена в активной зоне датчика положения консоли. Входы синхронных детекторов сигнала координаты Х и сигнала координаты Y, а также входы сумматоров сигнала координаты Х и сигнала координаты Y подключены к выходам датчика положения консоли. Управляющие входы синхронных детекторов сигнала координаты Х и сигнала координаты Y подключены к выходу генератора сигнала частоты колебаний иглы. Выход синхронного детектора сигнала координаты Х через сумматор сигнала координаты Х связан со входом X устройства перемещения образца, а выход синхронного детектора сигнала координаты Y через сумматор сигнала координаты Y связан с входом Y устройства перемещения образца. Технический результат, наблюдаемый при реализации заявленного решения заключается в создании устройства, позволяющего компенсировать в реальном времени X и Y составляющие сигнала измерения, вносимые собственными колебаниями иглы зонда, не связанными с колебаниями консоли. 1 ил.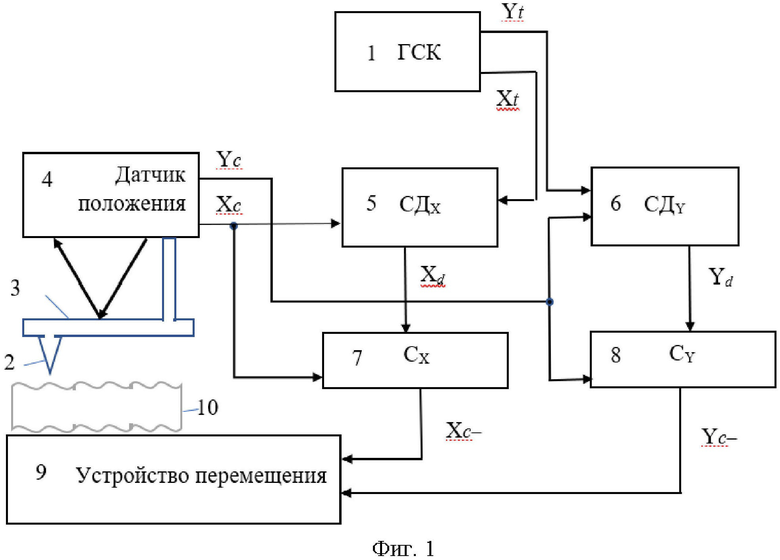
Устройство компенсации собственных колебаний иглы зонда сканирующего микроскопа, содержащее генератор колебаний, отличающееся тем, что в качестве генератора колебаний выбран генератор сигнала частоты собственных колебаний иглы, закрепленной на свободном конце нижней поверхности консоли, верхняя поверхность которой расположена в активной зоне датчика положения консоли, входы синхронных детекторов сигнала координаты Х и сигнала координаты Y, а также входы сумматоров сигнала координаты Х и сигнала координаты Y подключены к выходам датчика положения консоли, управляющие входы синхронных детекторов сигнала координаты Х и сигнала координаты Y подключены к выходу генератора сигнала частоты колебаний иглы, выход синхронного детектора сигнала координаты Х через сумматор сигнала координаты Х связан со входом X устройства перемещения образца, а выход синхронного детектора сигнала координаты Y через сумматор сигнала координаты Y связан с входом Y устройства перемещения образца.
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2012 |
|
RU2572522C2 |
| КОМБИНИРОВАННЫЙ СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП - РАСТРОВЫЙ ЭЛЕКТРОННЫЙ МИКРОСКОП | 1994 |
|
RU2089968C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| JP 2001272326 A, 05.10.2001 | |||
| US 5619139 A1, 08.04.1997 | |||
| US 7597717 B1, 06.10.2009. | |||

