Изобретение относится к области зондовой микроскопии и, в частности, к системе обнаружения, используемой для контроля положения колебательного зонда относительно поверхности образца.
Принцип, лежащий в основе работы сканирующего зондового микроскопа (SPM), заключается в осуществлении механического сканирования по поверхности образца с помощью нанометровой зондовой иглы с формированием изображения образца. Особенности изображения возникают в результате вариаций взаимодействия между иглой и образцом.
Конкретный пример SPM - атомный силовой микроскоп (AFM), в котором отслеживается силовое взаимодействие между образцом и острой иглой зонда. Зонд обычного AFM включает в себя очень маленький кантилевер (консоль), который прикреплен к держателю своим основанием, и имеет иглу на его противоположном (свободном) конце. Когда игла зонда приводится в непосредственную близость с образцом, между образцом и иглой возникает силовое взаимодействие. Если игла перемещается, например колеблется, то силовое взаимодействие в определенном смысле модифицирует это перемещение. Если игла статична, то взаимодействие переместит иглу относительно поверхности образца.
Во время сканирования силовое взаимодействие между иглой и поверхностью образца изменяется, если изменяются характеристики поверхности под зондовой иглой. Трехосный сканер с высокой разрешающей способностью обычно создает относительное перемещение между образцом и зондом, управляя образцом и/или держателем зонда. Влияние силы взаимодействия на положение и/или на перемещение зондовой иглы отслеживается во время сканирования. При обычной работе AFM уровень силового взаимодействия поддерживается постоянным. То есть его воздействие на зонд контролируется, и система обратной связи работает для коррекции разделения образца и основания зонда в ответ на любое изменение, чтобы вернуть контролируемый параметр до заданного значения - заданной точки. Данные, связанные с этой регулировкой (обычно вертикальное или "z"-перемещение) собираются и могут быть использованы для создания изображения образца в пределах некоторой области его поверхности.
Интерпретация изображения, сформированного AFM, до некоторой степени будет зависеть от характера исследуемой поверхности. Поверхностная топография обычно дает наибольший вклад в изображение, поскольку при сканировании зондом отслеживается высота образца, но другие параметры, например поверхностная гидрофобность и гидрофильность, вязкоупругость и т.д., также могут давать вклад. Зонд и микроскоп дополнительно могут быть приспособлены для измерения других свойств образца, например магнитных или электрических полей, посредством соответствующих силовых взаимодействий.
Системы AFM могут быть сконструированы для работы в разнообразных режимах отображения. В контактном режиме зонд находится по существу в непрерывном контакте с образцом. В динамическом режиме зонд колеблется, периодически приводя его в непосредственную близость или контакт, с образцом.
Если для зондирования поверхности используется статическая игла, то ее положение при сканировании отслеживают, используя эффект, заключающийся в том, что силовое взаимодействие проявляется в изгибе или отклонении кантилевера. Когда силовое взаимодействие между иглой и поверхностью изменяется, игла или смещается к поверхности, или отодвигается от поверхности. Это перемещение иглы передается кантилеверной части зонда, которая соответственно изгибается или прогибается по своей длине. Система AFM конструируется так, чтобы измерить отклонение кантилевера с помощью позиционно-чувствительного детектора, например, с помощью системы с оптическом рычагом, или с помощью другого детектора отклонения, как это известно в данной области техники. Отклонение, в данном случае, относится к наклону верхней поверхности зонда, которая используется AFM для обеспечения индикации изгиба кантилевера.
В качестве альтернативы, AFM может работать в динамическом режиме. Зонд колеблется на одной из его резонансных частот или близко к ней. Вариации взаимодействия образец-зонд воздействуют на перемещение зонда. В частности, можно отслеживать амплитуду, фазу и частоту этих колебаний и корректировать разделение зонд-образец, чтобы поддержать постоянным среднее взаимодействие.
Системы AFM могут быть сконфигурированы для использования во многих различных режимах. Следует иметь ввиду, что вышеприведенное описание контактного и динамического режимов призвано дать общее введение в область атомной силовой микроскопии и никоим образом не означает какое-либо ограничение области применения настоящего изобретения.
Независимо от своего режима работы, системы AFM могут использоваться для формирования изображения большого разнообразия образцов в атомном масштабе в различных средах (воздух, жидкость или вакуум). Как правило, они используют пьезоэлектрические возбудители, детекторы отклонения с оптическим рычагом и очень маленькие кантилеверы, произведенные с использованием кремниевых технологий. Высокое разрешение и универсальность обуславливают их применение в самых различных областях, например, для промышленного контроля, в полупроводниковом производстве, в биологических исследованиях, в материаловедении и в нанолитографии.
При этом игла (или игла зонда) является трехмерной, часто имеет коническую или пирамидальную форму и располагается на свободном конце балки кантилевера. Игла сужается к точке, которая является ближайшей точкой взаимодействия с поверхностью при сканировании. Сам кантилевер представляет собой балку, исключая иглу, которая поддерживает иглу на одном конце, а другой поддерживается механизмом микроскопа. Кантилевер и игла совместно обозначаются как зонд.
Зонд (для AFM) обычно изготавливается из кремния или нитрида кремния. Как правило, кантилевер имеет протяженность приблизительно 50-200 мкм, ширину 20-50 мкм и толщину приблизительно 0,2-2 мкм, но эти размеры, конечно, могут варьироваться в соответствии с применением. Форма также может быть различной: обычно она прямоугольная или треугольная, причем в последнем случае игла находится вблизи вершины треугольника. Игла обычно имеет размеры 5 мкм у ее основания, высоту 3-10 мкм, и радиус закругления конца составляет 10-20 нм. При работе заостренный конец иглы ориентирован к образцу.
Типичные системы AFM содержат подвижный столик, на котором устанавливается исследуемый зондом образец. Зонд содержит балку кантилевера и иглу, которая сужается до заострения и которая расположена у одного конца балки кантилевера. Другой конец балки кантилевера зафиксирован креплением. Система z-позиционирования, содержащая пьезоэлектрические приводы, действующие для перемещения столика и зонда друг относительно друга (z-направление), присоединяется соответственно. Когда система AFM работает в динамическом режиме, с зондом также соединяется генератор колебаний, который управляет им по вертикали, чтобы установить периодический контакт с поверхностью образца. Дополнительные приводы соединены или с креплением, или со столиком, или с обоими, и действуют, чтобы обеспечить относительное перемещение образца и зонда в плоскости (x,y) образца. Источник света размещается так, чтобы направить лазерный луч на верхнюю поверхность (задняя часть) в том конце балки кантилевера, на котором монтируется игла. Свет, отраженный от задней части кантилевера, проходит к позиционно-чувствительному детектору (PSD), обычно разделенному фотодиоду, который создает выходной сигнал, отображающий отклонение кантилевера. Выходной сигнал детектора соединен через контроллер обратной связи с системой z-позиционирования.
Выходной сигнал от PSD может быть обработан, чтобы извлечь количественную информацию, например, отклонение зонда, амплитуду, фазу или другие параметры. Контроллер обратной связи корректирует систему z-позиционирования в соответствии с одной из извлеченных величин.
Это изобретение связано с режимами работы AFM, в котором зонд колеблется в направлении к поверхности образца. Динамический режим работы AFM, в котором зонд колеблется на резонансной частоте, или вблизи резонансной частоты, является, поэтому, одним из примеров. Использование подвижного зонда, чтобы установить периодический контакт, уменьшает поперечные силы между зондовой иглой и образцом. Такие поперечные силы могут быть разрушительными для мягких образцов или для хрупкой зондовой иглы. Примером хрупкой иглы может быть игла с высоким характеристическим отношением, то есть игла с относительно большой длиной, которая используется для зондирования узких впадин на поверхностях образцов. Кроме того, AFM, работающий в динамическом режиме, часто оказывается пригодным для формирования более характерной для материала информации.
При формировании изображения образца AFM из уровня техники работает в динамическом режиме следующим образом. Игла колеблется преимущественно в вертикальном направлении и затем, используя систему z-позиционирования, перемещается к образцу, пока смещение иглы не установится на заданном уровне. Этот уровень может быть определен по измеряемой фазе, амплитуде или частоте, но независимо от используемой величины ее заданное значение является заданной точкой для управления с обратной связью. Колебание кантилевера отслеживают с использованием лазерного луча и детектора.
Затем игла сканирует поверхность образца, обычно с последующим формированием растровой картины. Когда игла сталкивается с частью поверхности с увеличенной высотой, например, ее перемещение изменяется, и отслеживаемый параметр, например амплитуда, смещается от своей заданной точки. Контроллер обратной связи устанавливается для коррекции вертикального положения держателя зонда, чтобы отодвигать его от образца и, таким образом, восстановить принятый от детектора сигнал до его заданной точки. Зонд, соответственно, поддерживается в положении, в котором он имеет постоянное среднее (по множеству колебаний) взаимодействие с поверхностью.
Таким образом, обратная связь системы микроскопа гарантирует, что отслеживаемый параметр, в этом примере - амплитуда вертикальных колебаний зонда, поддерживается по существу постоянной в течение сканирования. По мере выполнения сканирования вертикальное положение держателя, установленное системой z-позиционирования, отслеживается и используется для создания изображения. Как правило, изображение предоставляет индикацию относительно высоты поверхности образца.
Недавние усовершенствования в зондовой микроскопии предоставили намного более быстрые методики сканирования при меньших временах сбора данных. Однако становится все более и более очевидно, что с этим новым поколением микроскопов, как описано в публикациях WO 02/063368 и WO 2004/005844, имеются ограничения времен сбора данных для формирования изображения, налагаемые самими компонентами AFM.
В описанных выше AFM из уровня техники игла перемещается непрерывно по поверхности образца, покрывая заданное число пикселей в секунду. Колебание кантилевера отслеживается, и система с обратной связью выполняет непрерывные коррекции вертикального разделения зонда и образца, чтобы поддержать зонд на его заданном уровне колебаний. Скорость, с которой изменение колебаний может быть обнаружено и, соответственно, вертикальное разделение, откорректированное в ответ, по существу устанавливает верхнее ограничение скорости сканирования для прецизионной работы AFM. Для сбора точной информации взаимодействие зонд-образец должно быть постоянным по всем пиксельным положениям. Как следствие, разделение зонд-образец должно быть откорректировано системой с обратной связью за время, меньшее времени, требуемого для сбора зондом данных изображения, соответствующих отдельному положению пикселя. Таким образом, коррекция высоты должна быть выполнена прежде, чем зонд переместится в новое пиксельное положение в пределах растровой развертки.
Если скорость сканирования увеличивается, то время, затрачиваемое зондом в каждом пиксельном положении, оказывается меньше. В некоторый момент будет достигнута скорость, при которой зонд не может быть возвращен до заданного уровня его колебаний прежде, чем он перейдет к следующей пиксельной области. Система не имеет времени, чтобы возвратиться к устойчивому состоянию с обратной связью. Обратная связь, соответственно, будет запаздывать относительно системы сбора данных, и информация о высоте (формируемая из вертикальной коррекции) не будет отражать истинную высоту образца в пиксельном положении. Скорость считывания пикселя должна быть уменьшена либо посредством увеличения размера каждого пикселя, что снижает разрешение изображения, либо посредством замедления сканирования, с соответственным увеличением времени сбора данных.
Чтобы снизить влияние этого ограничения, предпринимались попытки повысить скорость системы с обратной связью. Один подход, описанный в US 6189374, использует два привода, чтобы обеспечить перемещение кантилевера в z-направлении. Первый привод управляет зондовой сборкой, и второй привод, который является неотъемлемой частью зонда, действует для перемещения только зонда. Пределы перемещения, обеспечиваемые этим вторым приводом, меньше, чем те, что обеспечиваются первым, но, поскольку он используется для управления только зондом, его время отклика меньше. Таким образом, начальная регулировка высоты иглы может быть выполнена через быстрый привод с последующей более медленной, большей и надлежащей регулировкой. Однако такое использование вложенных петель обратной связи с интегральным вторым приводом имело ограниченный успех. Частично это обусловлено трудностью интерпретации отклика комбинированной системы с обратной связью и, таким образом, трудностью определения высоты иглы. Без этой информации не может быть точно сформирована поверхностная топография (или другая характеристика образца).
В описанном выше динамическом режиме зонд обычно возбуждается на изгибном колебании. То есть зонд закрепляется вблизи его основания и кантилевер изгибается вокруг поперечной оси через его неподвижную точку. Это приводит к тому, что игла описывает дугообразную траекторию с центром на неподвижной точке, и, таким образом, между иглой и поверхностью образца устанавливается периодический контакт. Вследствие малого угла колебаний перемещение иглы можно рассматривать как фактически вертикальное.
Альтернативные реализации AFM основаны на возбуждении зонда на различных колебательных модах, чтобы получить измерения различных характеристик образца. Например, при формировании изображения со сдвиговой силой, зонд колеблется поперек поверхности, чтобы извлечь информацию, связанную с поперечными силами, возникающими между зондом и образцом, например, со сдвиговой силой, или для измерений градиента силы, которые влияют на поверхностное трение.
Крутильные колебания зонда описаны в US 6945099 и US 7168301. Крутильные колебания означают, что кантилевер колеблется вокруг своей продольной оси, производя крутильное перемещение. Игла поэтому выполняет по существу (вследствие относительно небольшого размера дугообразной траектории) поперечное перемещение по поверхности образца. Как и с формированием изображения со сдвиговой силой, поперечные силовые взаимодействия, возникающие при крутильном перемещении, могут использоваться для формирования связанных с материалом данных, являющихся дополнительными к данным, измеренным с использованием изгибных колебаний.
Описанные выше системы AFM предшествующего уровня техники представляют собой обнуляющие системы. То есть требуется только гарантировать, что колебательное перемещение зонда поддерживается постоянным. Информацию о высоте зонда получают от приводов, которые управляют системой с обратной связью, а не непосредственно от зонда. Это привносит дополнительный потенциальный источник ошибки: если нулевое значение по каким-либо причинам не поддерживается постоянным, то его вариация приведет к ошибкам в получаемых измерениях и, следовательно, в изображении.
Альтернативный подход заключается в непосредственном измерении высоты зондовой иглы, когда она перемещается по поверхности образца. Этот подход избегает зависимости от корректности функционирования системы с обратной связью для обеспечения косвенного измерения высоты поверхности (или другого параметра), но он совсем не прост для реализации этого с достаточной точностью. Как следствие, этот подход широко не используется. Примеры прямого измерения высоты описаны в US 5144150 (Yoshizumi), EP 1892727 (Mitutoyo) и EP 2017599. Все описанные в этих документах микроскопы используют интерферометр, чтобы извлечь относящуюся к высоте зонда информацию.
В US 5144150 описывается использование контактного зонда для измерения конфигурации искривленной поверхности, например, такой как у сферической линзы, линзы Френеля или у литографического рисунка на полупроводнике. Проблема в измерении таких поверхностей заключается в том, что на поверхность образца может быть произведено недопустимое давление, когда, например, балка кантилевера изгибается при прохождении зондом области возвышений на поверхности. Решение состоит в том, чтобы гарантировать, что изгиб балки кантилевера при сканировании поверхности поддерживается по существу постоянным. Это достигается подключением основания кантилевера к так называемому оптическому зонду. Оптический зонд фокусируется на задней части балки кантилевера выше иглы. Если балка изгибается, то игла смещается от фокуса оптического зонда. Оптический зонд затем физически перемещается так, чтобы возвратить иглу к ее фокусу и, таким образом, сохранить разделение игла-оптический зонд, которое, в свою очередь, гарантирует, что кантилевер вернется к своей исходной изгибной конфигурации. Иначе говоря, как и в предварительно описанной технике предшествующего уровня, для поддержания кантилевера, при, по существу, постоянном отклонении, используется система с обратной связью. Однако различие заключается в том, что информация о высоте образца не выводится из этой системы с обратной связью. Таким образом, эта конфигурация выгодна потому, что она устраняет необходимость в интерпретации и получении измерения высоты из системы с обратной связью и поэтому устраняет соответствующий потенциальный источник ошибок.
Конфигурация, описанная в US 5144150, ограничена сканированиями, использующими относительно медленно перемещающийся зонд. Система обратной связи для поддержания отклонения кантилевера не может немедленно реагировать на изменение. Поэтому скорость сканирования ограничивается, чтобы затраченное на поэлементный сбор изображения время было больше, чем время отклика системы с обратной связью с автофокусировкой. Кроме того, хотя интерферометрическое измерение основано на Доплеровском сдвиге частоты от перемещающегося зонда, эта информация полезна только для извлечения информации о высоте, поскольку скорость может предоставить указание относительно положения поверхности образца. Таким образом, высота измеряется в установленных интервалах времени относительно последнего известного положения зонда, чтобы могло быть оценено проходимое расстояние. Это ограничивает ее применение системой, в которой между пикселями случаются малые изменения высоты образца. Это не подходит для контроля зонда, колебательное перемещение которого приводит к быстро варьирующейся высоте.
Две публикации Mitutoyo, EP 1892727 и EP 2017599, посвящены улучшению точности, с которой зондовые микроскопы могут работать, а следовательно и улучшению разрешения изображения. Это достигается получением прямого измерения высоты зонда относительно неподвижной опорной точки, используя интерферометрию. В одном варианте выполнения луч, отраженный от задней части зонда, интерферирует с опорным лучом, и при этом извлекается разность хода. Это преодолевает проблему ошибок движения, привносимых сканерами: перемещение в z направлении зондовой иглы возникает исключительно от формы поверхности образца. Любая ошибка сканера заставит зонд изгибаться, что не может повлиять на прямое измерение высоты.
Система, описанная в EP 1892727, не использует никакой системы с обратной связью. То есть никакая регулировка не выполняется для предотвращения чрезмерного изгиба зонда. Соответственно, система ограничивается сканированием очень плоских поверхностей.
EP 2017599, опубликованный 21 января 2009 г., после даты приоритета этой заявки описывает развитие устройства, описанного ранее в документе Mitutoyo, в котором обратная связь реализуется. Эта система с обратной связью упрощена относительно предварительно описанных систем AFM с обратной связью предшествующего уровня техники в том, что используется единственный датчик для обнаружения и постоянной силы (сигнал обратной связи) и смещения (высоты) зонда. При сканировании зонду передается малое вертикальное высокочастотное колебание (дрожание). Амплитуда этой вибрации предоставляет информацию относительно уровня силового взаимодействия. Прямой сигнал высоты, измеренный интерферометром, соответственно имеет низкочастотную компоненту, которая соответствует вариации высоты образца, суммированной с высокочастотной компонентой, которая возникает из-за дрожания. При последующей обработке сигналов используются фильтры, чтобы отделить эти две компоненты. Высота основания зонда регулируется, чтобы поддержать амплитуду высокочастотной компоненты на постоянном значении. Однако скорость этой конфигурации все же ограничивается тем фактом, что системе с обратной связью необходимо достаточное время для отклика на любые изменения высоты поверхности. То есть амплитуда дрожания должна быть возвращена к своему заданному значению между точками сбора данных изображения. Данные не могут быть собраны быстрее, поскольку, во-первых, измерение амплитуды требует контроля колебаний по большому числу циклов (5-10 в данном случае) и, во-вторых, z-приводной системе необходимо время для коррекции положения зонда, чтобы восстановить амплитуду до ее установленного значения. Кроме того, информация о высоте зонда формируется посредством фильтрации обнаруженного сигнала для удаления компоненты, обусловленной дрожанием, при которой остается сигнал, указывающий среднюю высоту зонда. Поэтому, если высота зонда изменяется во времени быстрее, чем колебание зонда, это привносит ошибку в получаемое измерение высоты. Аналогично фильтр будет иметь конечное время отклика, которое является запаздыванием по времени между вариациями входного сигнала, переносящимися в выходной сигнал. Вариации высоты зонда по времени меньше, чем те, что являются не обнаруживаемыми, и приведут к ошибке в получаемом измерении высоты.
US 6952952 и US 7152462 описывают распознающий микроскоп, в котором колеблющийся зонд контролируется и используется для обнаружения специальных добавок на поверхности образца. Антитело, которое должно прикрепляться к определенным местам на поверхности образца, располагается на зондовой игле. Отслеживают колебание зонда по направлению к поверхности и от поверхности. Самая низкая точка в каждый период колебаний предоставляет информацию относительно положения поверхности, и самая высокая точка определяет одно из двух состояний: соединяется зонд с поверхностью вследствие прикрепления антитела или нет. Однако это устройство не измеряет непосредственно высоту, но измеряет отклонение или наклон задней части кантилевера. Нижняя точка отклонения используется не только для предоставления информации о поверхности образца, но также и для ввода в систему обратной связи, чтобы поддерживать среднее отклонение. Поэтому получаемые данные о топографии представляют собой свертку положения основания зонда, которое непрерывно корректируется системой обратной связи, и отклонения зонда. Использование системы с обратной связью опять-таки ограничивает полезную скорость сканирования этого устройства.
Таким образом, AFM системы предшествующего уровня техники полагаются на систему с обратной связью, чтобы косвенно получить изображение из системы позиционирования зонда, которая, поэтому, ограничивает скорость сканирования, и которая представляет собой потенциальный источник ошибок. Использование прямого измерения высоты предоставляет возможность получить информацию о высоте независимо от положения приводов. Однако до настоящего времени AFM системы получения изображения, которые используют колеблющийся зонд, имеют ограничение по точности или скорости сбора данных изображения вследствие специфических требований системы с обратной связью.
Цель настоящего изобретения заключается в предоставлении альтернативной системы обнаружения для использования со сканирующим зондовым микроскопом, которая пригодна для получения информации, относящейся к высоте поверхности образца, когда она сканируется зондовой иглой, которая колеблется над поверхностью, тем самым изменяя разделение между иглой и поверхностью, с улучшенной точностью и/или скоростью, чем это доступно в данной области техники предшествующего уровня.
Соответственно настоящее изобретение предоставляет систему обнаружения для использования со сканирующим зондовым микроскопом, причем система содержит:
источник света для создания луча, чтобы подсветить колеблющийся зонд, который периодически приближается к поверхности образца, причем зонд содержит кантилевер с основанием и свободными концами, причем свободный конец поддерживает острую иглу;
интерферометр, выполненный с возможностью обнаружения разности хода между светом, отраженным от зонда, и опорным лучом высоты, и вывода сигнала высоты, указывающего эту разность хода; и
устройство обработки сигналов, выполненное с возможностью отслеживания сигнала высоты и получения измерения для каждого цикла колебаний, которое указывает высоту зонда.
Поэтому система обнаружения в соответствии с настоящим изобретением пригодна для измерения высоты зонда непосредственно (посредством интерферометрии), когда он сканирует поверхность образца. Это выгодно потому, что при этом отпадает необходимость реализации системы с обратной связью. Обнаруженный сигнал высоты дискретизируется с частотой, которая гарантирует, что на цикл колебаний зонда извлекается больше чем одна измерительная точка. Эта дополнительная частота дискретизации, которая предпочтительно в 10 раз больше частоты колебаний зонда и более предпочтительно - в 100 раз больше, допускает получение измерения, которое отображает высоту образца, не прибегая к усреднению или фильтрации. Усреднение и фильтрация, как описано в EP 2017599, замедляют скорость сбора данных, что, в свою очередь, ограничивает скорость сканирования или разрешающую способность отображающей системы. Например, система, описанная в EP 2017599, полагается на амплитуду колебаний, поддерживаемую неизменной для фильтруемого сигнала, чтобы предоставить точное отображение высоты образца. Амплитуда колебаний поддерживается постоянной с помощью обратной связи, которая соответственно устанавливает предел скорости сканирования. Если скорость сканирования слишком высока, в получаемых данных измерения возникают ошибки, снижая точность отображения.
Устройство обработки сигналов предпочтительно устанавливается для извлечения данных из положения в пределах каждого цикла колебаний, который удовлетворяет заданным критериям измерения. Это может быть тогда, когда цикл указывает экстремальную разность хода, минимальную частоту изменения разности хода или другой подходящий указатель. Это гарантирует, что точка измерения извлекается в положении, наиболее вероятном для отражения истинной высоты образца. Например, при минимуме (или максимуме) разности хода можно заключить, что зонд находится в контакте с поверхностью образца. Это улучшает точность информации, извлекаемой системой обнаружения, которая может затем использоваться для создания изображения поверхности образца. Это изображение может отобразить поверхностную высоту или другое материальное свойство поверхности.
Хотя нет необходимости в реализации системы с обратной связью с данным изобретением, желательно, чтобы поддерживалась средняя высота зонда относительно образца. Это не означает, что ограничения техники предшествующего уровня должны быть перенесены в эту систему. Обратная связь не должна отвечать за возвращение выбранного параметра обратной связи до его заданного значения. Просто полезно поддерживать среднее разделение зонд-образец, при котором снижается вероятность больших сил, возникающих в случае быстрого изменения топографии образца и, соответственно, вероятность повреждения зонда и/или образца. Обратная связь может быть введена различным образом. Устройство обработки сигналов также может быть выполнено с возможностью извлечения сигнала обратной связи из сигнала высоты. Этот сигнал обратной связи может быть основанным на амплитуде, фазе или частоте колебаний зонда. В качестве альтернативы, система может включать в себя второй детектор, выполненный с возможностью приема компоненты света, отраженного от зонда, и извлечь сигнал обратной связи из нее.
Как отмечено выше, в этом варианте выполнения изобретения на обратную связь не полагаются для каждой точки измерения. Данные изображения извлекаются из интерферометрического измерения высоты, независимо от отклонения/наклона кантилевера. Это не только увеличивает скорость и доступное разрешение отображающей системы, но, по сравнению с обычными AFM, освобождает систему от ограничений, характерных для использования z-привода. Обычная система AFM извлекает измеренную точку данных, полученную из положения z-привода, когда высота зонда откорректирована системой обратной связи. Этот способ требует механизма z-позиционирования, который может быть точно откалиброван. Имеется немало возможностей для регулировки высоты зонда без необходимости в калибровке системы позиционирования. Этот вариант выполнения изобретения особенно хорошо подходит для использования зондов с интегрированным возбудителем. Такие зонды практически трудно откалибровать, и калибровка должна быть выполнена повторно при замене зонда. Например, это может быть реализовано посредством пьезорезистивного покрытия, или нагреванием теплового биморфного зонда удаленным источником света, или электрическим подключением резистивного нагревателя. Система обнаружения настоящего изобретения также идеальна для реализации с вложенными петлями обратной связи, описанными в US 6189374, поскольку это избавляет от необходимости калибровки множества отдельных возбудителей.
Система предпочтительно включает в себя светоделитель, выполненный с возможностью разделения отраженного от зонда света на две компоненты, одна из которых вводится в интерферометр, а вторая - на второй детектор.
В реализации обратной связи второй детектор может быть интерферометром, выполненным с возможностью обнаружения разности хода между светом, отраженным от зонда, и вторым опорным лучом высоты, и для вывода второго сигнала высоты, указывающего эту разность хода. Поэтому устройство обработки сигналов или второе устройство обработки сигналов выполнено с возможностью извлечения сигнала обратной связи из этого второго сигнала высоты, причем сигнал обратной связи основан на информации относительно амплитуды, фазы или частоты колебаний зонда.
В качестве альтернативы, второй детектор может быть детектором отклонения, выходной сигнал которого обрабатывается первым или вторым устройством обработки сигналов для извлечения сигнала обратной связи. Сигнал обратной связи может быть основанным на информации, относящейся к амплитуде, фазе или частоте колебаний зонда.
Интерферометр может быть гомодинным интерферометром и может включать в себя средство для создания пары интерферограмм с квадратурными фазами. Устройство счета интерференционных полос, идеально включающее в себя устройство подразделения интерференционных полос, предпочтительно устанавливается для производства выходного сигнала в зависимости от числа интерференционных полос, обнаруженных в каждой интерферограмме.
В качестве альтернативы, интерферометр может быть гетеродинным интерферометром.
Для любой интерферометрической системы опорный луч высоты предпочтительно образуется отражением от неподвижной опорной точки. Опорная точка может иметь известное, но переменное, соотношение с положением образца, или может быть зафиксирована относительно образца.
Идеально устройство обработки сигналов включает в себя FPGA (программируемую пользователем вентильную матрицу), которая способна обработать большой объем данных, полученных при наиболее эффективной работе микроскопа, посредством дополнительной дискретизации каждый цикл колебаний зонда. В качестве альтернативы, устройство обработки сигналов включает в себя схему дискретизации и хранения.
В альтернативном аспекте настоящее изобретение предусматривает сканирующий зондовый микроскоп для формирования изображения образца в соответствии с взаимодействием между образцом и зондом, причем микроскоп содержит приводное средство, выполненное с возможностью обеспечения относительного перемещения между зондом и поверхностью образца, генератор колебаний для возбуждения колебаний зонда в направлении, по существу перпендикулярном поверхности образца, и систему обнаружения зонда, как описано выше.
Предпочтительно, зонд имеет участок кантилевера с коэффициентом жесткости в пределах от 0,5 до 2 Нм-1.
Генератор колебаний может быть выполнен с возможностью приведения зонда в изгибное перемещение, чтобы обеспечить прерывистый контакт с поверхностью. В качестве альтернативы, игла может быть смещена от продольной оси зонда, и генератор колебаний может быть выполнен с возможностью приведения зонда в крутильные колебания вокруг его продольной оси. Эта последняя конфигурация особенно выгодна для работы с высокоскоростным сканированием: она допускает более высокочастотные колебания при низком изгибном коэффициенте жесткости, что снижает силу, с которой зонд действует на поверхность в случае больших ошибочных сигналов обратной связи (возникающих, например, от внезапного изменения высоты поверхности). Предпочтительно, для работы с крутильными колебаниями зонд является T-образным со смещением иглы от продольной оси на расстояние по меньшей мере 3 мкм.
Микроскоп предпочтительно содержит xy-сканер, сконфигурированный для обеспечения относительного перемещения между зондом и поверхностью образца в плоскости, по существу параллельной поверхности образца, и z-привод, выполненный с возможностью обеспечения относительного перемещения в направлении, по существу перпендикулярном поверхности образца. Система обратной связи может включать в себя z-привод и может функционировать на основе информации, формируемой системой обнаружения.
Z-привод в идеальном случае выполнен с возможностью перемещения основания зонда. Он может включать в себя объединенный или частично объединенный с зондом исполнительный механизм. Генератор колебаний может быть исполнительным механизмом или множеством исполнительных механизмов, и также может быть объединен или частично объединен с зондом.
Ниже исключительно в качестве примера описаны варианты выполнения изобретения в связи с сопровождающими чертежами.
Фиг.1 изображает схематическую иллюстрацию компонентов атомного силового микроскопа с системой обнаружения зонда в соответствии с настоящим изобретением.
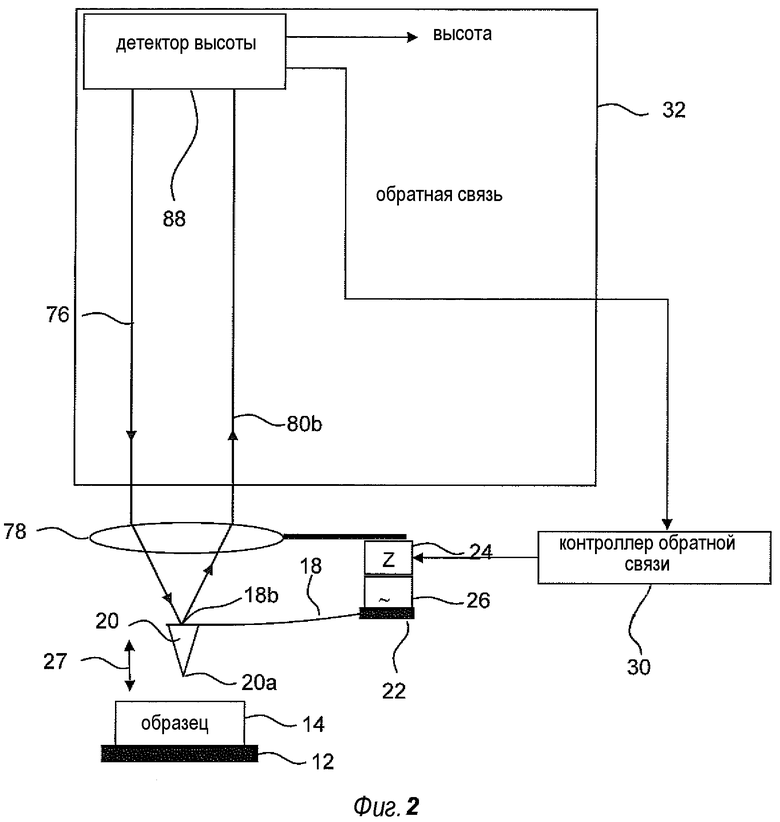
Фиг.2 - схематическая иллюстрация компонентов атомного силового микроскопа со вторым вариантом выполнения системы обнаружения зонда в соответствии с настоящим изобретением.
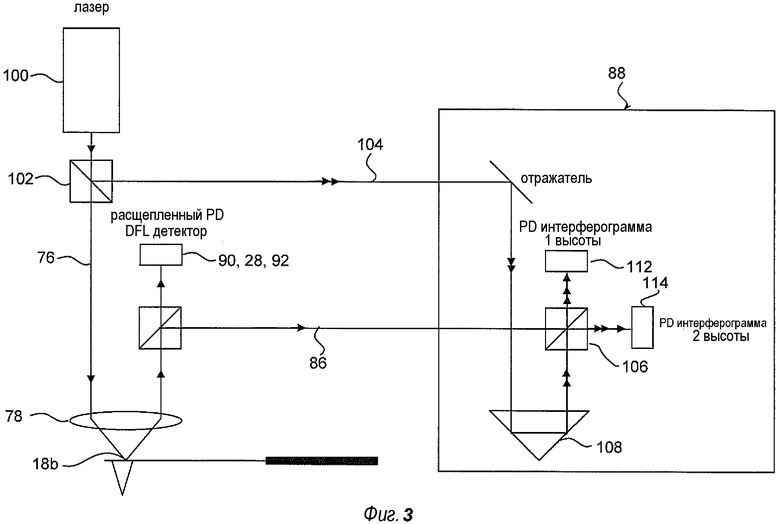
Фиг.3 - схематическая иллюстрация интерференционной системы обнаружения высоты для использования с настоящим изобретением.
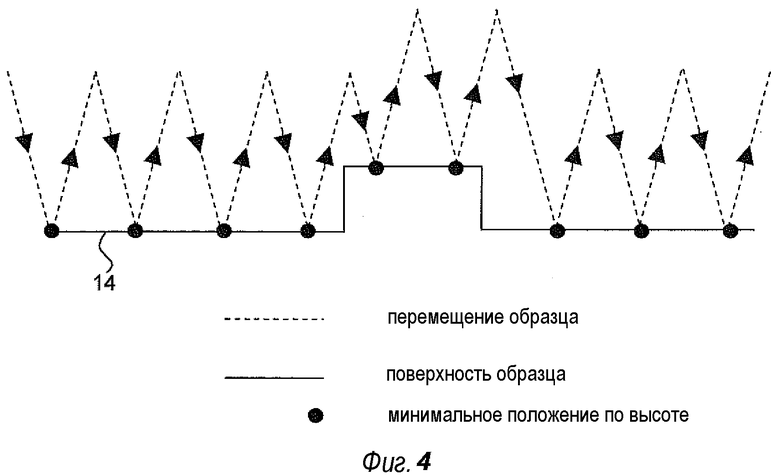
Фиг.4 - схематическое изображение колебательного движения зонда в динамическом режиме работы AFM в соответствии с данным изобретением.
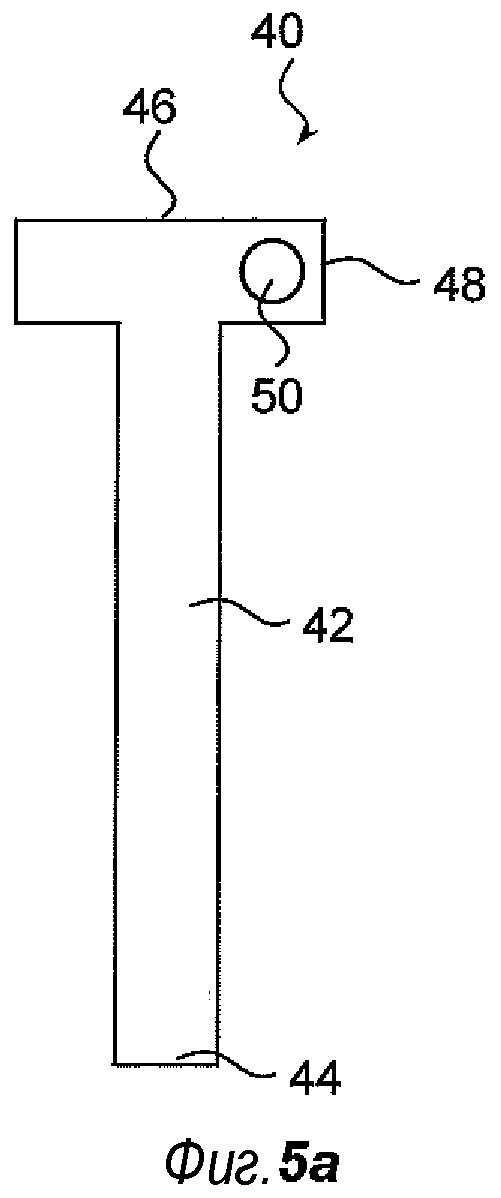
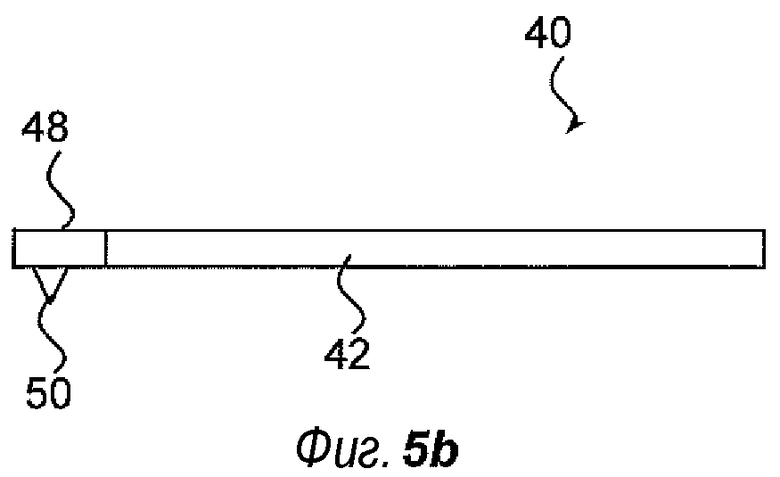
Фиг.5(a) и 5(b) - соответственно, виды сверху и сбоку зонда, подходящего для использования с AFM, работающего в альтернативном динамическом отображающем режиме в соответствии с данным изобретением.
На фиг.1 схематично показана модифицированная реализация AFM, обозначенная в целом как 10, в соответствии с настоящим изобретением. Показанное устройство AFM содержит подвижный столик 12, приспособленный для приема образца 14, поверхность которого предполагается исследовать зондом 16. Зонд 16 содержит балку 18 кантилевера и иглу 20, которая сужается к точке 20a и которая расположена на одном конце балки 18 кантилевера. Другой конец балки 18 кантилевера поддерживается креплением 22.
Один или более приводных двигателей (24, не показан) используются для управления образцом 14 (вместе со столиком 12) и/или зондом 16 так, что они могут быть сканированы друг относительно друга в трех измерениях: x-, y- и z-направления. Как это обычно принято, ось z Декартовой системы координат выбирается перпендикулярной плоскости, занимаемой образцом 14. То есть степень силового взаимодействия между зондом 16 и образцом 14 зависит и от xy-положения иглы 20 по образцу 14 (отображающему его пикселю), и также от ее высоты над образцом.
Система 24 z-позиционирования содержит пьезоэлектрические приводы, которые действуют для перемещения иглы 20 по направлению к и от (z-направление) образца 14. В этом варианте выполнения система z-позиционирования соединена с креплением 22 зонда. В качестве альтернативы, она может быть соединена со столиком 12 образца, и она может содержать непьезоэлектрические приводные механизмы, например, катушку электропривода, или тепловой биморфный возбудитель. Дополнительные двигатели соединены или с креплением 22, или со столиком 12, или с обоими, и действуют, чтобы предоставить относительное перемещение между образцом 14 и иглой 20 в плоскости (x,y) образца так, что игла 20 сканирует растровым образом, или, иначе говоря, по образцу 14.
Генератор 26 колебаний прикреплен или соединен с зондом и выполнен с возможностью обеспечения изгибного колебательного перемещения зонда и управляет им по существу в вертикальном направлении, как обозначено стрелками 27. Показанный на фиг.1 генератор 26 колебаний представляет собой пьезоэлектрический исполнительный механизм, установленный на основании зонда. В качестве альтернативы, может использоваться один из множества других приводных механизмов, которые известны как подходящие для этой цели. Например, магнитное или электрическое поле с соответственным зондом, введение теплового биморфного элемента в зонд или акустическое возбуждение. Перемещение зонда может быть в резонансе, или вдали от резонанса, или быть произвольным перемещением по направлению к и от поверхности. Оно может быть периодическим, почти периодическим или равномерным апериодическим. Однако игла зонда при этом перемещается повторяющимся образом к и от поверхности образца.
Зонд 16 является зондом AFM с малой массой, и во время сканирования игла 20 приводится в непосредственную близость с поверхностью образца. Механизм 29 обнаружения зонда, который будет рассмотрен ниже более подробно, в этом варианте выполнения выполнен с возможностью получения индикации и вертикального (z) смещения точки 18b в задней части кантилевера выше иглы 20 и ее отклонения (наклона). Очевидно, что в результате колебаний любая индикация, предоставленная механизмом обнаружения зонда, будет мгновенным наблюдением. И вертикальное (z) смещение, и наклон являются результатом вклада двух источников: первая компонента, отражающая свойство поверхности, к которому зонд чувствителен, обычно поверхностная топография, и вторая, более высокочастотная компонента, обусловленная вертикальным колебанием. Данные, относящиеся к вертикальному смещению, анализируются и выводятся на дисплей (не показан). Информация, относящаяся к наклону/отклонению задней части 18b кантилевера, вводится на контроллер 30 обратной связи, который, в свою очередь, соединен с приводным механизмом системы 24 z-позиционирования. Контроллер 30 обратной связи включает в себя сигнальный процессор, сконфигурированный для извлечения параметра обратной связи из его входной информации и для предоставления последующего сигнала управления на z-приводы.
Зонд 16 обычно (для AFM) изготавливается из кремния, или нитрида кремния, и сформирован в форме и размерах, как это описано выше в связи с техникой предшествующего уровня.
При получении изображения образца AFM 70 работает в динамическом режиме следующим образом. Зонд 16 приводится в колебательное движение генератором 26 колебаний. Используя систему z-позиционирования 24 и дополнительные приводы, образец 14 вначале приводится в периодический контакт с иглой 20. Традиционно в терминологии AFM игла 20, как говорят, находится в контакте с образцом 14, когда атомное силовое взаимодействие соответствует отталкивающему режиму. Крепление 22 понижается, перемещая зонд 16 к образцу 14, пока в этом варианте выполнения система 29 обнаружения отслеживает колебание и переменное во времени отклонение кантилевера. Когда амплитуда отклонения при колебании достигает заданного уровня, перемещение крепления, под управлением контроллера обратной связи, останавливается. Этот заданный уровень амплитуды представляет собой заданную точку для контроллера 30 обратной связи.
По мере сканирования игла 20 перемещается вверх и вниз, если поверхностная высота/силовое взаимодействие изменяется. На это обусловленное поверхностью перемещение накладывается более высокочастотная компонента, возникающая в результате колебательного движения зонда. И амплитуда, и фаза, и частота этой колебательной компоненты движения иглы будут зависеть и от параметров настройки генератора колебаний, и от силы взаимодействия между поверхностью и иглой. Аналогично наклон кантилевера представляет собой суперпозицию компоненты, возникающей от взаимодействия с поверхностью образца, и второй компоненты, обусловленной колебаниями зонда. На амплитуду фазу и частоту второй компоненты влияет положение зонда относительно поверхности. По мере сканирования отслеживают амплитуду ac-компоненты отклонения. Любые изменения изменяют сигнал, подаваемый на контроллер 30 обратной связи, и система 24 z-позиционирования регулируется соответственно.
Ниже более подробно описывается работа системы 29 обнаружения в соответствии с настоящим изобретением. Источник света (не показан) испускает лазерный луч 76, который фокусируется линзой 78 объектива на заднюю часть 18b кантилевера. Отраженный свет 80a, b, c собирается линзой 78 и направляется к неполяризующему светоделителю 82. Как можно видеть из фиг.1, мгновенный наклон кантилевера 18b влияет на угол, при котором свет отражается. В одном положении зонда отраженный луч следует по пути 80b. Однако если задняя часть кантилевера 18b наклоняется влево (относительно чертежа), то отраженный луч 80a будет отклоняться против часовой стрелки, а правый наклон отклонит отраженный луча 80c по часовой стрелке. Поскольку задняя часть 18b кантилевера расположена в фокусе, или вблизи фокуса, линзы 78, угловая вариация отраженного луча преобразуется после линзы в боковое смещение. То есть независимо от углового наклона, отраженный луч 80a, b, c будет распространяться параллельно оптической оси системы обнаружения, причем наклон влево производит левое боковое смещение, и наклон направо создает смещение направо относительно центрального положения.
Светоделитель 82 размещен так, что он отражает с поворотом на 90° по существу половину 84a, b, c падающего на него света и пропускает другую половину 86a, b, c. Пропущенная компонента 86a, b, c вводится на интерферометр 88. Работа этого интерферометра более подробно рассматривается в связи с фиг.2. По существу, отраженный луч 86a, b, c интерферирует с опорным лучом, отраженным от верхней поверхности столика 12. В качестве альтернативы, может быть использована другая неподвижная точка с известным соотношением относительно поверхности столика. Это обеспечивает измерения разности хода между двумя лучами и, следовательно, индикацию мгновенной высоты задней части 18b кантилевера выше поверхности столика. Из этих данных может быть извлечена информация относительно высоты поверхности для формирования изображения.
Компоненты 84a, b, c, отраженные от светоделителя 82, собираются линзой 90 на детектор 28 отклонения. Детектор 28, в этом варианте выполнения, разделен по его длине на независимые области A и B детектора. Выходные сигналы, создаваемые этими областями, вводятся на дифференциальный усилитель 92, который выводит сигнал, равный различию между двумя каналами. Детектор 28 отъюстирован с собирающей оптикой так, что отраженный свет 80b, 84b распределяется между каналами A и B. Левый наклон задней части 18b кантилевера означает, что сигнал от детектора 28 увеличивается в канале B, приводя к падению выходного сигнала от дифференциального усилителя 92. И наоборот, правый наклон означает, что канал A принимает увеличение сигнала, и дифференциальным усилителем 92 создается повышенный выходной сигнал. Поскольку зонд колеблется, различие между сигналами канала A и канала B создаст переменный по времени сигнал на выходе усилителя 92. Этот выходной сигнал отображает изменяющееся во времени отклонение зонда. Амплитуда этого сигнала соответственно предоставляет прямую индикацию амплитуды колебаний зонда. Поэтому выходной сигнал усилителя 92 может использоваться как основание для сигнала обратной связи, подаваемого на контроллер 30 обратной связи. Контроллер 30 обратной связи управляет системой 24 z-позиционирования, чтобы поддержать амплитуду сигнала на его заданной точке.
В альтернативных вариантах выполнения детектор 28 отклонения может быть выполнен с возможностью отслеживания других параметров, например фазы и/или частоты колебаний зонда.
В дополнительном варианте выполнения детектором 28 отклонения может отслеживаться среднее (dc) отклонение. Система обнаружения отклонения устанавливается так, как описано выше. Поскольку зонд колеблется, выходной сигнал сигнала от дифференциального усилителя 92 также будет колебаться. Фильтр (не показан) включен в этот вариант выполнения и располагается между дифференциальным усилителем 92 и контроллером 30 обратной связи. Параметры фильтра таковы, что выходной сигнал фильтра соответствует среднему значению дифференциального сигнала за один или более периодов колебаний. Этот средний сигнал, в свою очередь, обеспечивает индикацию среднего положения зонда по множеству циклов.
Независимо от сигнала обратной связи, или эквивалентного отклонения кантилевера, истинная высота зонда над поверхностью измеряется интерферометрической системой обнаружения высоты. Система с обратной связью соответственно используется для гарантии того, что среднее взаимодействие зонд-образец, наблюдаемое посредством его влияния на некоторый параметр отклонения или высоту, поддерживалась бы на постоянном уровне.
Важно, что свет 76 системы обнаружения фокусируется на задней части 18b кантилевера. Поэтому система z-позиционирования также связана с линзой 78 объектива и размещается так, что если зонд 16 поднимается или опускается, линза 78 поднимается или опускается на равную величину. В альтернативном варианте выполнения линза 78 объектива выбирается так, чтобы иметь глубину фокуса, большую пределов перемещения, ожидаемых от иглы. Соответственно, нет никакой необходимости в регулировке положения объектива относительно иглы 20.
В дополнительных вариантах выполнения (x,y)-сканирующие приводные механизмы (не показаны на чертеже) и система 24 z-позиционирования могут быть заменены любыми подходящими средствами привода, которые могут не быть пьезоэлектрическими. Приводы могут быть прикреплены к столику 12 креплению 22 зонда или и к тому, и к другому.
Описанная выше система 29 обнаружения может включать в себя альтернативное известное средство измерения отклонения кантилевера 18. Например, зонд может быть сформирован с интегрированными пьезо-резистивными датчиками. Система обнаружения высоты, подобная используемой для измерения высоты кантилевера, может быть также использована для измерения отклонения. То есть интерферометр используется для измерения высоты иглы 20 относительно высоты основания кантилевера.
Пример системы 32 обнаружения, сконфигурированной для использования еще одного дополнительного параметра для обратной связи, показан на фиг.2. На этом чертеже компоненты, общие с показанной на фиг.1 системой, имеют подобные обозначения. В этом варианте выполнения отклонение зонда не обнаруживается, и, таким образом, система 32 обнаружения не включает в себя детектор 28 отклонения и соответствующие оптические элементы 82, 90, 92. Весь свет 80b, отраженный от зонда, передается на интерферометр 88. Интерференционные картины опять-таки образуются между отраженным лучом 80b и опорным лучом. Интерференционные сигналы обрабатываются для предоставления разности хода, которая указывает высоту задней части кантилевера над поверхностью столика. Этот сигнал высоты будет содержать колебательную компоненту, которая возникает вследствие колебаний зонда. Амплитуда, фаза или частота этих колебаний в сигнале высоты могут быть извлечены из интерференционного измерения высоты зонда и использованы как параметр для основания обратной связи. Если используется амплитуда, например, то амплитуда колебаний будет просто амплитудой вариации высоты на частоте колебаний. В качестве альтернативы, двойная амплитуда может быть извлечена из разности между измерениями максимальной и минимальной высотами в течение каждого периода колебаний.
Какая бы ни была реализована система обратной связи, важно то, что среднее значение выбранного параметра обратной связи в его заданной точке поддерживается системой обратной связи. Нет никакой необходимости в реализации такой обратной связи, чтобы значение заданной точки устанавливалось для каждого положения пикселя. Параметр обратной связи может быть извлечен в течение каждого цикла колебаний зонда, но нулевое положение обратной связи не должно быть достигнуто прежде, чем получено следующее измерение. Среднее значение, вблизи которого поддерживается перемещение зонда, обычно получается по множеству циклов колебаний зонда.
Источник света, используемый с этим вариантом выполнения, представляет собой лазерный источник, но возможны и альтернативные источники. Для интерференционного обнаружения свет должен быть когерентным в той степени, которая соответствует требованиям данного интерферометра.
На фиг.3 более подробно показаны оптические компоненты первого варианта выполнения системы 29 обнаружения, показанной на фиг.1. Свет от лазерного источника 100 расщепляется вторым 102 расщепителем луча на падающий луч 76 и опорный луч 104. Падающий луч 76 фокусируется линзой 78 объектива на заднюю часть 18b кантилевера. После отражения от кантилевера луч 80 расщепляется первым 82 расщепителем луча. Как описано ранее, первая компонента 84 направляется на детектор 90, 28, 92 отклонения, и вторая компонента 86 - на интерферометр 88.
В интерферометре луч 86, который был отражен от кантилевера 18b, расщепляется расщепителем 106 луча. Опорный луч 104 направляется на соответственно установленный уголковый отражатель 108 и затем на расщепитель 106 луча. Уголковый отражатель 108 ориентирован так, что он предоставляет фиксированную длину оптического пути относительно вертикального (z) положения образца. Светоделитель 106 имеет энергопоглощающее покрытие и расщепляет и падающий 86, и опорный 104 лучи для производства первой и второй интерферограмм с относительным сдвигом фазы ~90°. Две интерферограммы обнаруживаются соответственно на первом 112 и втором 114 фотодетекторах.
В идеальном случае сигналы фотодетектора дополняют синусный и косинусный сигналы с фазовым сдвигом 90°. Кроме того, они не должны иметь dc-смещения, должны иметь равные амплитуды и зависеть только от положении кантилевера и длины волны λ лазера. Известные способы используются для отслеживания выходных сигналов фотодетекторов 112, 114 при изменении разности оптического пути, чтобы определить и применить коррекцию ошибок, возникающих в результате двух сигналов фотодетектора, не являющихся абсолютно гармоническими, с равной амплитудой и синфазными квадратурами. Аналогично, уровни dc-смещения также корректируются в соответствии со способом, известным в данной области техники.
Эти сигналы фотодетектора подходят для использования с обычным интерферометрическим обратимым устройством счета интерференционных полос и устройством подразделения интерференционных полос, которые могут быть предоставлены в виде специальных аппаратных средств или в виде программируемого компьютера. Устройство счета интерференционных полос с квадратурными фазами пригоден для измерения смещения положения кантилевера с точностью до λ/8. То есть до 66 нм для света с длиной волны 532 нм. Известные методики подразделения интерференционных полос, основанные на арктангенсе сигналов, позволяют улучшение точности до нанометрового уровня или еще менее.
Интерферометрические способы получения разности хода между двумя когерентными лучами известны в данной области техники и более подробно здесь не рассматриваются.
В варианте выполнения, описанном выше, опорный луч выполнен как имеющий фиксированную длину оптического пути относительно z-положения образца. Он может быть соответственно отражен от поверхности столика, на котором установлен образец, или от уголкового отражателя, положение которого связано с положением столика, как описано выше. Длина пути опорного луча может быть больше или меньше, чем длина пути, проходимого отраженным от зонда лучом. В качестве альтернативы, соотношение между отражателем и z-положением образца не делается фиксированным. В таком варианте выполнения опорный луч может быть отражен от фиксированной точки, причем фиксированная точка имеет известное (но варьирующееся) соотношение с z-положением образца. Поэтому высота иглы получается из интерферометрически измеренной разности хода и z-положения образца относительно фиксированной точки.
Описанный здесь интерферометр представляет собой пример гомодинной системы. Конкретная описанная система предоставляет множество преимуществ для данного применения. Использование двух интерферограмм с квадратурными фазами допускает измерение смещения кантилевера по множеству интерференционных полос и, следовательно, по большому диапазону смещений. Использование фазосдвигающего покрытия в светоделителе 106 делает интерферометр нечувствительным к поляризационным эффектам, например, возникающим из-за изменений поляризации при отражении светового луча от кантилевера. Пример интерферометра, основанного на этих принципах, описан в US 6678056. Альтернативные интерферометрические системы, пригодные для измерения изменения длины оптического пути, также могут использоваться с этим изобретением. Подходящий гомодинный поляризационный интерферометр описан в вышеупомянутом EP 1892727, и подходящий гетеродинный интерферометр описан в вышеупомянутом US 5144150.
Ясно, что вышеописанный зондовый микроскоп пригоден для работы при скоростях сканирования, превышающих предел, налагаемый обратной связью. Информация о высоте, извлекаемая системой обнаружения, представляет собой истинную мгновенную высоту зонда. Это не зависит от положения основания зонда относительно иглы, то есть от отклонения. Соответственно, хотя изменение отклонения (или другого параметра обратной связи) около его среднего значения во время сканирования и допустимо, оно отделено от измерения высоты посредством интерферометрии.
На фиг.4 схематически показано перемещение зонда при осуществлении его периодического контакта с поверхностью образца. Эта иллюстрация представляет собой только пример отображения движения зонда. Оно может иметь различные волнообразные формы в зависимости от придаваемого зонду движения и, до некоторой степени, в зависимости от взаимодействия между зондом и поверхностью образца. Как правило, колебания зонда следуют по синусоидальной волновой траектории.
Следует отметить, что информация о высоте, извлекаемая системами 29, 32 обнаружения, содержит точную информацию относительно высоты зонда, но для получения полезной информации она должна быть соотнесена с особенностями поверхности образца. Теоретически, как это можно видеть из фиг.4, самая низкая точка каждого цикла колебаний представляет собой истинную высоту поверхности. Соответственно, система обработки данных конфигурируется так, чтобы определить измерение самой малой высоты для каждого периода колебаний зонда, и затем оно выводится, предоставляя измерение, которое может быть использовано для формирования изображения. То есть самая низкая точка в каждом цикле колебаний отображает положение поверхности образца. Другие точки на высокочастотной компоненте колебаний сигнала также могут быть использованы, чтобы предоставить значимый индикатор положения поверхности образца. Например, точка минимальной скорости во время нижней половины цикла колебаний может быть извлечена системой обработки данных. Если отображается деформируемая поверхность, то скорость зонда, или эквивалентная частота изменения сигнала высоты, упадет при встрече с ней и будет происходить деформация поверхности. В этом случае измерение высоты образца может быть извлечено из точки каждой высоты колебаний, при которой наблюдается вариация скорости изменения высоты зонда.
Этот способ определения положения поверхности намного более точен, чем тот, что описан в EP 2017599, который использует фильтры, чтобы отделить низкочастотную вариацию высоты образца от высокочастотных колебаний дрожания. Эта, по существу операция обращения свертки, извлекает средний низкочастотный сигнал, на который наложен высокочастотный сигнал. Однако это не истинное измерение высоты поверхности, и это может привести к погрешностям при высоких скоростях сканирования, или если ошибка вводится в нулевой параметр обратной связи, который приводит к вариации ее значения. Чтобы фильтрованный средний сигнал мог предоставить точную индикацию высоты образца, параметр обратной связи должен возвратиться к своему нулевому значению между положениями измерения. Высота зонда представляет собой сумму высоты образца и амплитуды колебаний дрожания. Если амплитуда колебаний дрожания изменяется, то среднее положение зонда относительно поверхности образца также изменится. То есть будет наблюдаться новое положение зонда при отсутствии фактического изменения высоты поверхности. Чтобы избежать этой ошибки, параметр обратной связи должен быть сохранен в его нулевом значении. Поэтому для точного сбора данных система должна иметь время для регулировки, чтобы минимизировать любую ошибку в системе обратной связи, которая, поэтому, препятствует работе на высоких скоростях сканирования. Кроме того, если скорость сканирования такова, что высота образца изменяется за время, меньшее колебания зонда, или фактически за время, меньшее времени отклика фильтра, эта вариация не может быть измерена системой предшествующего уровня техники и фактически привносит ошибку в измерение высоты образца.
Полевая программируемая вентильная матрица (FPGA) сконфигурирована так, чтобы предоставить необходимую возможность обработки. В динамическом режиме частота колебаний зонда AFM обычно составляет от 40 кГц до 400 кГц. В микроскопе, настроенном в соответствии с этим изобретением, частота дискретизации для записи данных составляет приблизительно 40 МГц. Следовательно, каждый цикл колебаний зонда дискретизируется приблизительно 100-1000 раз, чего более чем достаточно, чтобы точно определить минимальную высоту. Точка наиболее близкого подхода к поверхности в каждом цикле колебаний зонда может быть получена из интерферометрических данных: или самая большая, или самая малая разность хода в зависимости от того, меньше или больше длина пути опорного луча, соответственно, чем длина пути луча, отраженного от зонда.
Альтернативные системы обработки данных также могут быть использованы с этим изобретением. Например, схема дискретизации и хранения, или высокоскоростной процессор цифровых сигналов также пригодны для обеспечения необходимых возможностей обработки сигналов.
Вышеупомянутая частота дополнительной дискретизации 100-1000 Гц может быть понижена без существенной потери точности. Ясно, однако, что частота осуществления дискретизации должна быть выше, и в идеальном случае должна быть более чем в 10 раз выше частоты, на которой зонд колеблется, чтобы иметь возможность извлечь значимые данные.
На фиг.5(a) и (b) показан T-образный зонд 40, подходящий для использования с AFM, работающим в альтернативном динамическом режиме в соответствии с данным изобретением. На фиг.5(a) показан вид сверху в плане и на фиг.5(b) - вид сбоку. Зонд 40 содержит кантилевер с продольным рычагом 42, вытянутым от основания 44 к свободному концу 46. Поперечина 48 простирается в стороны поперек рычага 42 на свободном конце 46, тем самым, формируя T-форму. Игла 50 асимметрично расположена на поперечине и поддерживается поперечиной 48.
T-образные зонды 40 известны в данной области техники предшествующего уровня и управляются обычно изгибным образом в динамическом режиме AFM. Их форма такова, что они особенно полезны для получения данных, относящихся к свойствам материала образца.
В варианте выполнения AFM в соответствии с данным изобретением, зонд 40 колеблется с крутильными колебаниями. То есть зонд 40 колеблется в резонансе, или вблизи резонанса, вокруг его продольного рычага 42. Таким образом, смещение иглы 50 описывает маленькую дугу, которая перемещает ее вертикально к и от поверхности, устанавливая с ней периодический контакт. Поэтому при работе в зонде 40 устанавливаются крутильные колебания, и он затем перемещается к поверхности до заданной точки обратной связи, чтобы начать сканирование. Затем зонд отслеживают в положении иглы, и данные, относящиеся к положению иглы и ее перемещению, формируют таким же образом, как описано в связи с вариантами выполнения, показанными на фиг.1-4.
Игла 50 на фиг.5 показана справа от поперечины 48, но могла бы также быть и смещенной налево. Минимальное расстояние смещения составляет приблизительно 3 мкм, учитывая допуски для доступного промышленного изготовления зонда. В качестве альтернативы, зонд может не быть T-образным, но прямоугольным со смещенной иглой.
Периодический контактный режим, установленный крутильными колебаниями, дает некоторые преимущества перед другими режимами, когда он используется при высокоскоростном сканировании микроскопа. Крутильный резонанс происходит на более высокой частоте, чем изгибный резонанс. Идеально частота крутильных колебаний составляет приблизительно 0,5-1 МГц, и коэффициент жесткости для крутильных колебаний составляет приблизительно 0,5-2 Нм-1. Это означает, что частота дискретизации для поверхности выше в случае работы с крутильными колебаниями. Поэтому это может быть использовано для увеличения скорости сканирования или для улучшения разрешения. Другая проблема, которая возникает при динамическом получении изображения, состоит в том, что случайно большая ошибка в системе с обратной связью может привести к большой силе, приложенной к поверхности, если изгиб (отклонение) увеличивается, чтобы отрегулировать ошибку в разделении образец-основание зонда. Использование крутильной моды колебаний для обеспечения динамического колебания означает, что жесткость изгиба может быть уменьшена, без каких-либо потерь динамических функциональных возможностей. Это уменьшает влияние ошибок на приложенную поверхностную силу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБНАРУЖЕНИЯ ЗОНДА | 2009 |
|
RU2512674C2 |
| УСТРОЙСТВО КОМПЕНСАЦИИ СОБСТВЕННЫХ КОЛЕБАНИЙ ИГЛЫ ЗОНДА СКАНИРУЮЩЕГО МИКРОСКОПА | 2019 |
|
RU2703607C1 |
| ЗОНД ДЛЯ АТОМНОГО СИЛОВОГО МИКРОСКОПА | 2004 |
|
RU2356110C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2003 |
|
RU2334214C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С КОМПАКТНЫМ СКАНЕРОМ | 2012 |
|
RU2571449C2 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ПРИПОВЕРХНОСТНОГО МАГНИТНОГО ПОЛЯ С ИСПОЛЬЗОВАНИЕМ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2000 |
|
RU2193769C2 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ ПОЛУКОНТАКТНОГО РЕЖИМА С ФИКСИРОВАННЫМ ПИКОМ СИЛЫ ДЛЯ ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ СВОЙСТВ ОБРАЗЦА | 2011 |
|
RU2571446C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ | 2011 |
|
RU2479063C1 |
| АТОМНО-СИЛОВОЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, ИСПОЛЬЗУЮЩИЙ КВАЗИЧАСТИЦЫ | 2014 |
|
RU2563339C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ В СКАНИРУЮЩЕЙ ЗОНДОВОЙ МИКРОСКОПИИ | 2017 |
|
RU2698953C2 |
Система (29) обнаружения динамического зонда предназначена для использования со сканирующим зондовым микроскопом такого типа, который включает в себя зонд (18), который перемещается периодически к поверхности образца и от поверхности образца. При сканировании поверхности образца интерферометр (88) формирует выходной сигнал высоты, указывающий разность хода между светом, отраженным от зонда (80a, 80b, 80c), и опорным лучом высоты. Устройство обработки сигнала отслеживает сигнал высоты и получает измерение для каждого цикла колебаний, которое указывает на высоту зонда. Система обнаружения может также включать в себя механизм обратной связи, который действует для поддержания среднего значения параметра обратной связи на заданном уровне. Технический результат - увеличение точности и скорости сбора данных изображения. 2 н.з. и 37 з. п. ф-лы, 6 ил.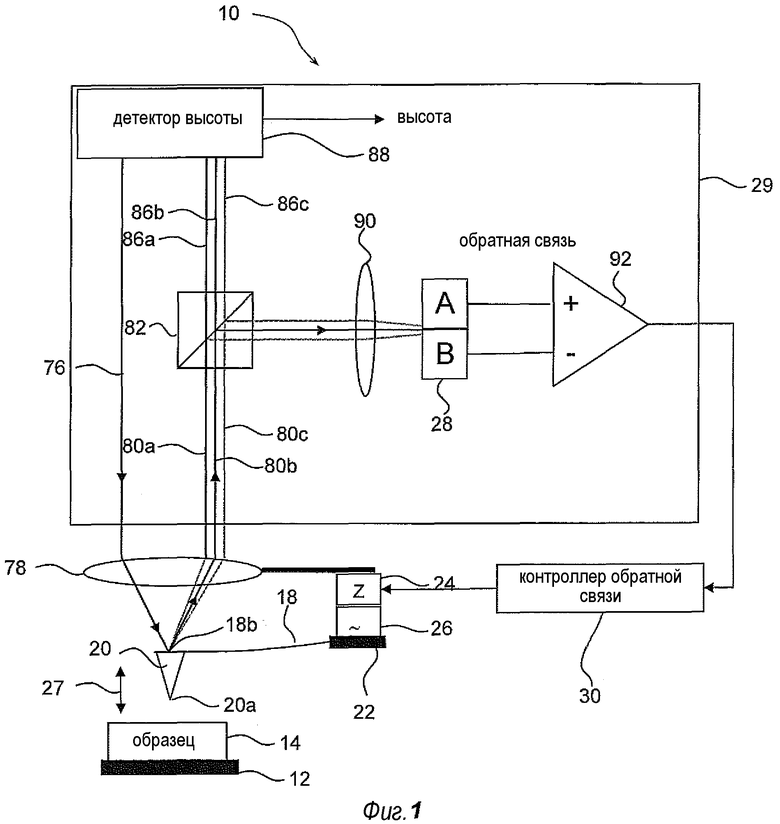
1. Система обнаружения для использования со сканирующим зондовым микроскопом, причем система содержит:
источник света, чтобы создать луч для подсветки колебательного зонда, который периодически приближается к поверхности образца, причем зонд содержит кантилевер с основанием и свободными концами, причем свободный конец поддерживает острую иглу;
интерферометр, выполненный с возможностью обнаружения разности хода между отраженным от зонда светом и опорным лучом высоты, и вывода сигнала высоты, указывающего эту разность хода; и
устройство обработки сигнала, выполненное с возможностью отслеживания сигнала высоты и извлечения данных из положения в пределах каждого цикла колебаний, который удовлетворяет заданным критериям измерения, причем извлеченные данные используются для получения измерения для каждого цикла колебаний, которое указывает высоту зонда.
2. Система обнаружения по п.1, причем положение в пределах каждого цикла находится в экстремальной разности хода.
3. Система обнаружения по п.1, причем положение в пределах каждого цикла представляет собой минимальную степень изменения разности хода.
4. Система обнаружения по п.1, 2 или 3, причем извлеченные данные используются для построения изображения поверхности образца.
5. Система обнаружения по п. 1, 2 или 3, причем измерение указывает на свойства материала образца.
6. Система обнаружения по п. 1, 2 или 3, причем частота, с которой дискретизируется сигнал высоты, по меньшей мере, в 10 раз выше частоты колебаний зонда.
7. Система обнаружения по п.6, причем частота, с которой дискретизируется сигнал высоты, по меньшей мере, в 100 раз выше частоты колебаний зонда.
8. Система обнаружения по п. 1, 2 или 3, причем сигнал высоты имеет ширину полосы пропускания больше частоты колебаний зонда.
9. Система обнаружения по п. 1, 2 или 3, причем устройство обработки сигналов также выполнено с возможностью извлечения из сигнала высоты сигнала обратной связи для использования при возврате зонда к заданной средней высоте над поверхностью.
10. Система обнаружения по п.9, причем сигнал обратной связи основан на амплитуде, фазе или частоте колебаний зонда.
11. Система обнаружения по п. 1, 2 или 3, причем система включает в себя второй детектор, выполненный с возможностью приема компоненты света, отраженного от зонда.
12. Система обнаружения по п.11, причем второй детектор выполнен с возможностью извлечения сигнала обратной связи из этой принятой компоненты.
13. Система обнаружения по п.11, причем система включает в себя светоделитель, выполненный с возможностью разделения света, отраженного от зонда, на две компоненты, одна из которых вводится в интерферометр, и вторая из которых вводится во второй детектор.
14. Система обнаружения по п.11, причем второй детектор представляет собой интерферометр, выполненный с возможностью обнаружения разности хода между светом, отраженным от зонда, и вторым опорным лучом высоты, и вывода второго сигнала высоты, указывающего эту разность хода, и причем это или второе устройство обработки сигналов выполнено с возможностью извлечения сигнала обратной связи из этого второго сигнала высоты, причем сигнал обратной связи основан на информации относительно амплитуды, фазы или частоты колебаний зонда.
15. Система обнаружения по п.9, причем второй детектор представляет собой детектор отклонения, выходной сигнал которого обрабатывается устройством обработки сигналов или вторым устройством обработки сигналов для извлечения сигнала обратной связи.
16. Система обнаружения по п.15, причем сигнал обратной связи основан на информации, относящейся к амплитуде, фазе или частоте колебаний зонда.
17. Система обнаружения по п.15, причем сигнал обратной связи основан на информации, относящейся к среднему отклонению зонда по множеству колебаний.
18. Система обнаружения по п. 1, 2 или 3, причем интерферометр представляет собой гомодинный интерферометр.
19. Система обнаружения по п.18, причем интерферометр включает в себя средство для создания пары интерферограмм с квадратурными фазами.
20. Система обнаружения по п.19, причем система включает в себя устройство счета интерференционных полос, выполненное с возможностью формирования выходного сигнала, зависящего от числа интерференционных полос, обнаруженных в каждой интерферограмме.
21. Система обнаружения по п.20, причем устройство счета интерференционных полос включает в себя устройство подразделения интерференционных полос.
22. Система обнаружения по п.19, причем средство для создания пары интерферограмм с квадратурными фазами представляет собой светоделитель с фазорасщепляющим покрытием.
23. Система обнаружения по п.1, причем интерферометр представляет собой гетеродинный интерферометр.
24. Система обнаружения по п. 1, 2 или 3, причем опорный луч высоты создается отражением от неподвижной опорной точки.
25. Система обнаружения по п.24, причем опорная точка имеет известное, но переменное, соотношение с положением образца.
26. Система обнаружения по п.24, причем опорная точка неподвижна относительно образца.
27. Система обнаружения по п.24, причем устройство обработки сигналов включает в себя FPGA.
28. Система обнаружения по п.24, причем устройство обработки сигналов включает в себя схему дискретизации и хранения.
29. Сканирующий зондовый микроскоп для формирования изображения образца в соответствии с взаимодействием между образцом и зондом, причем микроскоп содержит приводное средство, выполненное с возможностью обеспечения относительного перемещения между зондом и поверхностью образца, генератор колебаний для возбуждения колебаний зонда в направлении, по существу перпендикулярном поверхности образца, и систему обнаружения зонда по п. 1, 2 или 3.
30. Сканирующий зондовый микроскоп по п.29, причем зонд включает в себя кантилеверный рычаг с коэффициентом жесткости в пределах от 0,5 до 2 Нм-1.
31. Сканирующий зондовый микроскоп по п.29, причем генератор колебаний выполнен с возможностью приведения зонда в изгибное перемещение.
32. Сканирующий зондовый микроскоп по п.29, причем игла смещена от продольной оси зонда, и генератор колебаний выполнен с возможностью приведения зонда в крутильное колебание вокруг его продольной оси.
33. Сканирующий зондовый микроскоп по п.32, причем зонд является T-образным.
34. Сканирующий зондовый микроскоп по п.32, причем игла смещена от продольной оси на расстояние по меньшей мере 3 мкм.
35. Сканирующий зондовый микроскоп для формирования изображения образца по п.29, причем
приводное средство содержит xy-сканер, выполненный с возможностью обеспечения относительного перемещения между зондом и поверхностью образца в плоскости, по существу параллельной поверхности образца, и z-привод, выполненный с возможностью обеспечения относительного перемещения в направлении, по существу перпендикулярном поверхности образца.
36. Сканирующий зондовый микроскоп по п.35, причем микроскоп также включает в себя систему с обратной связью, включающую в себя z-привод, и который функционирует на основе информации, формируемой системой обнаружения.
37. Сканирующий зондовый микроскоп по п.36, причем z-привод выполнен с возможностью перемещения основания зонда.
38. Сканирующий зондовый микроскоп по п.36, причем z-привод включает в себя исполнительный механизм, интегрированный или частично интегрированный с зондом.
39. Сканирующий зондовый микроскоп по п.29, причем генератор колебаний представляет собой исполнительный механизм.
| US 2006005614 A1, 12.01.2006 | |||
| JP 2002350319 A, 04.12.2002 | |||
| US 2007234786 A1, 11.10.2007 | |||
| EP 1804050 A2, 04.07.2007 |

