Изобретение относится к области нанотехнологии, а именно, к устройствам, обеспечивающим получение информации о топологии и других свойствах поверхности объекта, и предназначено для использования в туннельной, атомно-силовой и других видах сканирующей зондовой микроскопии, при измерении в качестве зонда Кельвина, при определении контраста сопротивлений растекания, измерении термодинамики полей лазерного и лучевого воздействия и т.п..
Известен зонд для сканирующей емкостной микроскопии, состоящий из консоли с укрепленной на одном ее конце иглой, закрепленной на чипе другой стороной, и имеющий проводящий слой, расположенный, по крайней мере, на поверхности зонда со стороны иглы. На поверхности зонда со стороны иглы установлен проводящий экран, отделенный от проводящего слоя первой диэлектрической прослойкой (RU №2289862, G12B 21/02, 2006.)
Недостатком данного устройства является функционально узкая область применения, ограниченная предназначением только для измерения емкости образцов, покрытых тонким слоем диэлектрика, что ограничивает его применение для решения других задач туннельной, атомно-силовой и других видов сканирующей зондовой микроскопии.
Известен зонд для сканирующего зондового микроскопа, содержащий кварцевый резонатор с иглой, закрепленной на одном его конце, причем другой конец установлен на держателе-платформе (Franz J. Giessibl, High - speed force sensor for force microscopy and profilometry utilizing a quartz fork, Applied Physics Letters, 1998, Volume 73, No. 26, p. 3956-3958; Appl. Phys. Lett. 1999, Volume 74, p. 4070.)
Недостатком устройства является его низкая надежность, связанная с использованием кварцевого резонатора и нестабильностью его характеристик, возникающей из-за приклейки его одним концом к держателю-платформе. Это также затрудняет процедуру замены иглы без замены всего дорогостоящего зонда и сужает его функциональные возможности.
Наиболее близким к заявляемому техническому решению относится зонд сканирующего зондового микроскопа, состоящий из последовательно соединенных рабочего элемента нанозонда в виде иглы, консоли, держателя, датчика частоты собственных колебаний консоли и оптического датчика движения консоли, оптически связанного с консолью. (Миронов В.Л. Основы сканирующей зондовой микроскопии. М.: Техносфера, 2004, с. 76-92.)
Недостатками прототипа является то, что во время сближения и подвода иглы к образцу возникает жесткий контакт иглы с поверхностью, вызывающий повышенный износ иглы и, часто, ее повреждение, требующее необходимость дорогостоящих замен. Кроме того, износ или повреждение иглы, меняет случайным образом размер иглы, внося априорно неизвестную случайную погрешность измерения, обусловленную изменением формы иглы, что ухудшает точность и достоверность измерения зондом. Это снижает точность и надежность применения этого зонда.
Технической проблемой изобретения является создание устройства, позволяющего компенсировать в реальном времени повышенный износ и повреждение игл, требующих их замены.
Техническим результатом изобретения является повышение точности и надежности зонда микроскопа.
Поставленная проблема и технический результат достигается тем, что нанозонд сканирующего микроскопа, состоит из последовательно соединенных рабочего элемента нанозонда, консоли, держателя, датчика частоты собственных колебаний консоли и оптического датчика движения консоли, оптически связанного с консолью. Согласно изобретению, он дополнительно содержит привод рабочего элемента и блок формирования сигнала рассогласования положения рабочего элемента, входы которого подключены к выходам оптического датчика движения консоли и датчика частоты собственных колебаний консоли, выход блока формирования сигнала связан с входом привода рабочего элемента, а второй вход связан с консолью, при этом, рабочий элемент выполнен в виде углеродной нанотрубки, которая выполнена однослойной.
Выполнение рабочего элемента в виде углеродной нанотрубки позволяет осуществлять его перемещение в реальном времени, стабилизацию его размера, вынесенного за пределы свободного конца консоли, таким образом компенсировать износ или повреждение рабочего элемента, сохраняя постоянным его размер, что повышает точность и достоверность измерения сканирующим микроскопом в сочетании с уникальными свойствами углеродной нанотрубки.
Применение принципа управления положением углеродной нанотрубки позволяет варьировать в широком диапазоне зазор контактного и неконтактного взаимодействия углеродной нанотрубки с поверхностью, изменяя в реальном времени условия сближения углеродной нанотрубки, созданием необходимого зазора, положения трубки в пространстве области взаимодействия углеродной нанотрубки с поверхностью объекта. Это осуществляется приводом рабочего элемента, подключенного к блоку формирования сигнала рассогласования положения рабочего элемента, изменяющим до требуемого размера зазор между нанотрубкой и поверхностью. Регулировка зазора между углеродной нанотрубкой и поверхностью обеспечивает наилучшие условия реализации точности того или иного метода измерения, который принят исследователем в данном типе зондовой микроскопии. Возможность сдвига углеродной нанотрубки для сохранения зазора между трубкой и поверхностью в соизмеримом с длиной углеродной нанотрубки диапазоне регулирования позволяет решать проблемы жесткого контакта, контроля состояния рабочего элемента при наличии актов его разрушения или затупления при контакте с поверхностью.
Блок формирования сигнала рассогласования положения рабочего элемента на основе сравнения выходных сигналов датчика частоты собственных колебаний консоли и оптического датчика движения консоли позволяет достичь создания требуемых условий повышения точности неразрушающего контроля формы и неравномерности поверхности объекта в течение времени, необходимого и достаточного для сохранения постоянства параметров зонда в интервале длительности проводимого исследования.
Предложенное устройство нанозонда можно использовать практически во всех вариантах сканирующей зондовой микроскопии, в том числе, туннельной, атомно-силовой и другим видах, а также в обособленных системах измерения пространственного распределения рельефа поверхностей объектов путем сканирования их зондом, в устройствах диагностики пространственного распределения форм и неразрушающего контроля неравномерности поверхностей, включая динамику их изменения с помощью известных методов, которые предназначены для использования в сканирующей микроскопии и т.п.
Таким образом, с повышением точности функционирования нанозонда с рабочим элементом, выполненным из углеродной нанотрубки, одновременно повышена надежность устройства.
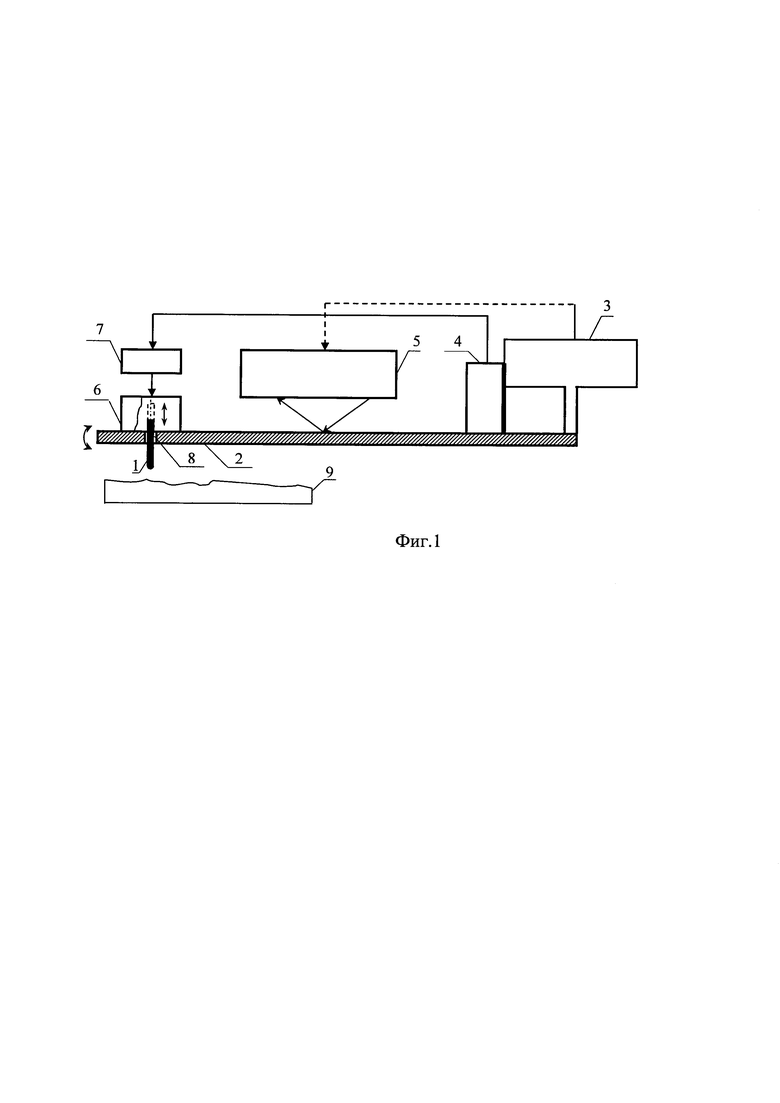
Изобретение поясняет чертежом, где представлена функциональная схема нанозонда сканирующего микроскопа.
Нанозонд сканирующего микроскопа состоит из рабочего элемента 1, выполненного в виде однослойной углеродной нанотрубки, консоли 2, жестко закрепляемой в держателе 3, являющимся опорной частью нанозонда, датчика 4 частоты собственных колебаний консоли 2 и оптического датчика 5 движения консоли 2. Датчик 4 частоты собственных колебаний консоли 2, в частном случае, выполнен из пьезоэлектрического элемента, который одним концом закреплен на консоли 2, а вторым - прикреплен к держателю 3. Оптический датчик 5 движения консоли 2, жестко закрепленный на держателе 3, связан оптически (лазерным лучом) со свободным концом консоли 2. В окрестности конца консоли 2 размещена углеродная нанотрубка 1 и привод 6 рабочего элемента 1, в котором размещена углеродная нанотрубка 1. Блок 7 формирования сигнала рассогласования положения нанотрубки 1, связанный электрически с датчиком 4 частоты собственных колебаний консоли 2 и оптическим датчиком 5 движения консоли 2, выполнен по схеме решающего логического устройства. Выработка сигнала о необходимости смещения (показано двухсторонней стрелкой) приводом 6 нанотрубки 1, формируется на основе сопоставления информации об изменении выходных сигналов датчика 4 частоты собственных колебаний консоли 2 и оптического датчика 5 движения консоли 2. Привод 6 нанотрубки 1, установлен (показано в разрезе) соосно с отверстием 8 проходного канала нанотрубки 1 в окрестности свободного конца консоли 2. Отверстие 8 на свободном конце консоли 2 является проходным - направляющей перемещения нанотрубки 1, ортогональной к консоли 2. Отверстие 8 на свободном конце консоли 2 вкупе (показано пунктиром в 6) с приводом 6 нанотрубки 1 предотвращает ее смещение в плоскости консоли 2, одновременно позволяя перемещать (показано двухсторонней стрелкой в 6) по длине и положению нанотрубки 1 в ортогональной плоскости к поверхности консоли 2. При изгибе консоли 2 (направления изгиба показаны криволинейной стрелкой) нанотрубка 1 и привод 6 смещаются с областью их крепления совокупно с перемещением свободного конца консоли 2.
Оптический датчик движения 5 консоли 2, жестко закрепленный на держателе 3 и связанный оптически со свободным концом консоли 2, и нанотрубка 1, непрерывно отслеживает положение нанотрубки 1 относительно поверхности 9. Регистрация отклонения от принятого размера зазора взаимодействия нанотрубки 1 с поверхностью 9 основано на контроле отклонения луча полупроводникового лазера, отраженного от кончика торца нанотрубки 1. Данные координат положения нанотрубки 1 оптический датчик движения 5 консоли 2 передает в блок формирования сигнала рассогласования 7 положения нанотрубки 1, связанного электрически с приводом 6, совместно с сигналом датчика частоты собственных колебаний 4 консоли 2, управляющей перемещением нанотрубки 1 при необходимости.
Нанозонд сканирующего микроскопа работает следующим образом.
В начале работы вручную или электронной системой сканирующего микроскопа нанозонд «грубо» подводится к поверхности 9. Зонд начинает взаимодействовать с поверхностью 9 при их сближении на расстояние менее сотен нанометров. Затем перемещение нанозонда вдоль поверхности 9 осуществляется более точным устройством, обеспечивающим сканирование поверхности 9 нанотрубкой 1. При точном сканировании углеродная нанотрубка 1 движется над поверхностью 9. Информационный параметр сигнала, снимаемого с нанотрубки 1, определяется типом зондовой микроскопии. Например, в туннельной микроскопии по одной из методик туннельный ток поддерживается стабильным за счет обратной связи, показания же оптического датчика движения 5 консоли 2 меняются в зависимости от топографии поверхности. Эти изменения регистрируют; на их основе строят карту высот поверхности. Другая методика предполагает движение нанотрубки 1 на фиксированной высоте над поверхностью 9. В этом случае регистрируют изменение тока. Его значения служат основой построения топографии поверхности. Можно утверждать, что принцип работы нанозонда сканирующего микроскопа основан на регистрации взаимодействия между поверхностью 9 и нанотрубкой 1.
В описываемом зонде в качестве рабочего элемента 1 используют однослойную углеродную нанотрубку, установленную на свободном, не закрепленном конце консоли 2, называемой часто кантилевером. Сила, действующая со стороны поверхности 9, приводит к изгибу консоли 2 с соответствующим смещением нанотрубки 1. Появление выбросов или впадин поверхности 9 под нанотрубкой 1 приводит к изменению силы, действующей на зонд, и изменению изгиба консоли 2. Таким образом, регистрируя значение изгиба консоли 2, можно сделать вывод о рельефе поверхности 9.
В зависимости от характера действия силы между свободным концом консоли 2 и поверхностью 9 различают три режима взаимодействия нанотрубки 1 микроскопа: контактный, полуконтактный и бесконтактный. Принцип действия зонда рассмотрим в наиболее «тяжелых» для углеродной нанотрубки 1 в режимах сканирования с актами прямого контакта углеродной нанотрубки 1 с поверхностью 9. Эти режимы отличаются наличием динамического и ударного воздействия, ведущих к ускоренной до катастроф деструкции игл зонда.
В контактном режиме взаимодействия нанотрубки 1 с поверхностью 9 микроскоп является аналогом профилометра. Сканирование зондом осуществляется, как правило, в режиме постоянной силы, когда оптический датчик движения 5 консоли 2 и встроенный в систему обратной связи датчик частоты собственных колебаний 4 консоли 2 оценивают значение изгиба консоли 2 и частоту вынужденных ее колебаний под действием неравномерного рельефа поверхности 9. В этом случае свободный конец консоли 2 с закрепленной на нем углеродной нанотрубки 1 перемещается на некоторой средней высоте над поверхностью 9. Изгиб консоли 2, одним концом закрепленной в держателе 3, пропорционален силе, действующей со стороны поверхности 9 на углеродную нанотрубку 1, установленную на свободном, без опорном втором конце консоли 2. Работа нанозонда в полуконтактном режиме практически повторяет алгоритм работы в контактном режиме. Полуконтактный режим отличается от контактного существенно меньшим числом, в том числе и ударных, соприкосновений нанотрубки 1 с поверхностью 9.
В контактных режимах применения непосредственное механическое взаимодействие известных вариантов зонда с поверхностью 9 часто приводит к поломке зондов и разрушению поверхности 9 в процессе сканирования. Прочность, упругость и износоустойчивость углеродных нанотрубок 1 способна существенно повысить точность и надежность (равносильно продлить живучесть) нанозонда.
При износе или обломе углеродной нанотрубки 1 предлагаемое решение обеспечивает возможность наносмещения по длине и положению углеродной нанотрубки 1 в ортогональной и тангенциальной плоскости к поверхности консоли 2. При изгибе консоли 2 нанотрубка 1 и привод 6 смещаются совокупно с областью их крепления, а именно, с перемещением свободного конца консоли 2.
При работе в бесконтактном режиме пьезоэлемент датчика частоты собственных колебаний 4 консоли 2 принудительно возбуждает колебания углеродной нанотрубки 1 зонда на некоторой частоте (лучше резонансной). Амплитуда и фаза собственных и вынужденных колебаний углеродной нанотрубки 1 зонда выделяется датчиком частоты собственных колебаний 4 консоли 2 и оптическим датчиком движения 5 консоли 2, выходные сигналы которых поступают на блок формирования сигнала рассогласования 7 положения углеродной нанотрубки 1, связанного электрически с приводом 6. При равенстве этих сигналов в блоке формирования сигнала рассогласования 7 положения нанотрубки 1 они компенсируют друг друга. При неравенстве и наличии прироста сигнала оптического датчика движения 5 консоли 2, вызванного воздействием рельефа поверхности 9, блок выделяет рассогласование как полезный сигнал. Амплитуда и фаза этого сигнала находятся в прямой зависимости от силы, действующей со стороны поверхности. Таким образом, выделяемый в блоке 7 формирования сигнала рассогласования положения углеродной нанотрубки 1, сигнал рассогласования служит основой принятия в реальном времени решения.
Таким образом, предлагаемое устройство нанозонда может быть использовано в системах сканирующей микроскопии для управляемого сканирования и коррекции износа рабочего элемента зонда в широком диапазоне (более порядка) изменения длин, скоростей и мер износа, путем управления положением углеродной нанотрубки 1 и параметрами режимов сканирования нанотрубкой 1 в реальном времени.
Регулировкой зазора между торцом углеродной нанотрубки 1 и поверхностью 8 создаются наилучшие условия реализации того или иного метода измерения, который принят в данном типе сканирующей зондовой микроскопии. Наличие подвижного положения углеродной нанотрубки 1 регулируемой длины рабочего элемента зонда для управляемого воздействия на величину зазора между нанотрубкой 1 и поверхностью 9 с равным длине углеродной нанотрубки 1 размером регулирования позволяет предотвращать основные проблемы, связанные с жесткими контактами, отсутствия контроля состояния кончика зонда и возникновения актов разрушения или затупления.
В отличие от прототипа, в котором общее время сканирования не должно длиться более десяти минут, для предлагаемого зонда время сканирования определяется износом полной длины углеродной трубки, превышающей на два порядка и более известные иглы зонда.
Технический результат изобретения, целью которого является повышение точности и надежности зонда, достигнут путем введения однослойной углеродной нанотрубки как рабочего элемента с контролем ее положения и управления перемещением в реальном времени взаимодействия.
Практическое использование предлагаемого нанозонда возможно во всех типах сканирующей зондовой микроскопии; его применение, обеспечивая стабильность параметров микроскопов, повышает точность и достоверность получаемых результатов.
Данное изобретение находится на стадии технического предложения и макетного проектирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Зонд сканирующего микроскопа | 2019 |
|
RU2708530C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ СОБСТВЕННЫХ КОЛЕБАНИЙ ИГЛЫ ЗОНДА СКАНИРУЮЩЕГО МИКРОСКОПА | 2019 |
|
RU2703607C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ | 2011 |
|
RU2479063C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1997 |
|
RU2152063C1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ПРИПОВЕРХНОСТНОГО МАГНИТНОГО ПОЛЯ С ИСПОЛЬЗОВАНИЕМ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2000 |
|
RU2193769C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ДЛЯ ДИНАМИЧЕСКОГО ЗОНДА | 2009 |
|
RU2518859C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2009 |
|
RU2494406C2 |
| ЗОНД ДЛЯ СКАНИРУЮЩЕЙ ЕМКОСТНОЙ МИКРОСКОПИИ | 2004 |
|
RU2289862C2 |
| МНОГОЗОНДОВЫЙ ДАТЧИК КОНТУРНОГО ТИПА ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2003 |
|
RU2244256C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
Изобретение относится к области нанотехнологии, а именно к устройствам, обеспечивающим получение информации о топологии и других свойствах поверхности объекта. Нанозонд сканирующего микроскопа состоит из последовательно соединенных рабочего элемента нанозонда, консоли, держателя, датчика частоты собственных колебаний консоли и оптического датчика движения консоли, оптически связанного с консолью, а также привода рабочего элемента и блока формирования сигнала рассогласования положения рабочего элемента, входы которого подключены к выходам оптического датчика движения консоли и датчика частоты собственных колебаний консоли. Выход блока формирования сигнала связан с входом привода рабочего элемента, второй вход которого связан с консолью. Рабочий элемент выполнен в виде углеродной нанотрубки. Техническим результатом изобретения является повышение точности и надежности зонда микроскопа. 1 з.п. ф-лы, 1 ил.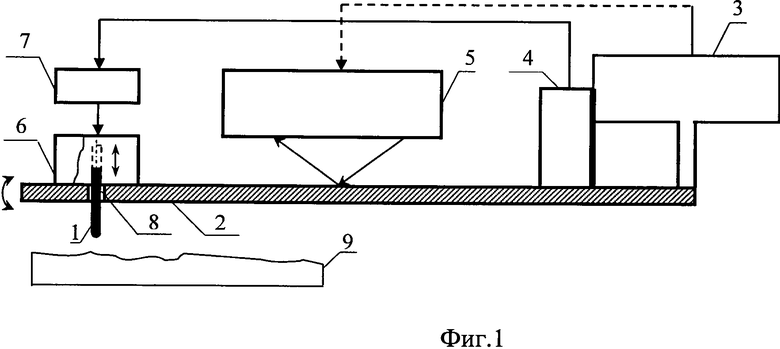
1. Нанозонд сканирующего микроскопа, состоящий из последовательно соединенных рабочего элемента нанозонда, консоли, держателя, датчика частоты собственных колебаний консоли и оптического датчика движения консоли, оптически связанного с консолью, отличающийся тем, что он дополнительно содержит привод рабочего элемента и блок формирования сигнала рассогласования положения рабочего элемента, входы которого подключены к выходам оптического датчика движения консоли и датчика частоты собственных колебаний консоли, выход блока формирования сигнала связан с входом привода рабочего элемента, второй вход которого связан с консолью, при этом рабочий элемент выполнен в виде углеродной нанотрубки.
2. Нанозонд по п. 1, отличающийся тем, что углеродная нанотрубка выполнена однослойной.
| US 6528785 B1, 04.03.2003 | |||
| US 8136385 B2, 20.03.2012 | |||
| US 7247842 B1, 24.07.2007. |

