Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления тормозной силой и к контроллеру тормозной силы.
Уровень техники
[0002] PTL 1 раскрывает технологию, когда скорость вращения колес равна нулю в течение предварительно определенного времени в состоянии, в котором тормозная сила прикладывается к транспортному средству, для определения того, что транспортное средство является неподвижным, и поддержания тормозной силы, даже когда водитель снимает ногу с педали тормоза.
Список библиографических ссылок
Патентные документы
[0003] PTL 1. JP H7-215185 A
Сущность изобретения
Техническая задача
[0004] Тем не менее, когда определяется то, остановлено или нет транспортное средство, на основе скорости вращения колес, тормозная сила может поддерживаться при том, что скорость вращения колес сохраняется равной нулю до того, как транспортное средство замедлится в достаточной степени на поверхности дороги с низким коэффициентом трения. Это может затруднять управление поведением транспортного средства до того, как транспортное средство остановится.
Задача настоящего изобретения заключается в том, чтобы предотвращать поддержание тормозной силы для поддержания остановленного состояния транспортного средства до того, как транспортное средство замедлится в достаточной степени на поверхности дороги с низким коэффициентом трения.
Решение задачи
[0005] Согласно аспекту настоящего изобретения, предусмотрен способ управления тормозной силой, включающий в себя: приложение тормозной силы к транспортному средству при операции нажатия педали тормоза; приложение тормозной силы к транспортному средству, независимо от того, нажимается или нет педаль тормоза, после истечения предварительно определенного времени после определения того, что транспортное средство остановлено, на основе скорости вращения колес; и задание предварительно определенного времени большим тогда, когда трение поверхности дороги, по которой движется транспортное средство, является низким, чем тогда, когда трение поверхности дороги является высоким.
[0006] Задача и преимущества изобретения могут реализовываться и достигаться посредством элементов и комбинаций, конкретно указанных в формуле изобретения. Следует понимать, что как вышеприведенное общее описание, так и нижеприведенное подробное описание являются примерными и пояснительными, а не ограничивающими изобретение.
Краткое описание чертежей
[0007] Фиг. 1 является блок-схемой, иллюстрирующей пример конфигурации транспортного средства, включающего в себя контроллер тормозной силы согласно первому варианту осуществления;
Фиг. 2 является блок-схемой, иллюстрирующей пример функциональной конфигурации модуля оценки состояния движения согласно первому варианту осуществления;
Фиг. 3 является графиком для пояснения примера способа для оценки дороги с низким μ;
Фиг. 4 является блок-схемой, иллюстрирующей пример функциональной конфигурации тормозного контроллера согласно первому варианту осуществления;
Фиг. 5 является блок-схемой последовательности операций, иллюстрирующей пример способа управления тормозной силой согласно первому варианту осуществления;
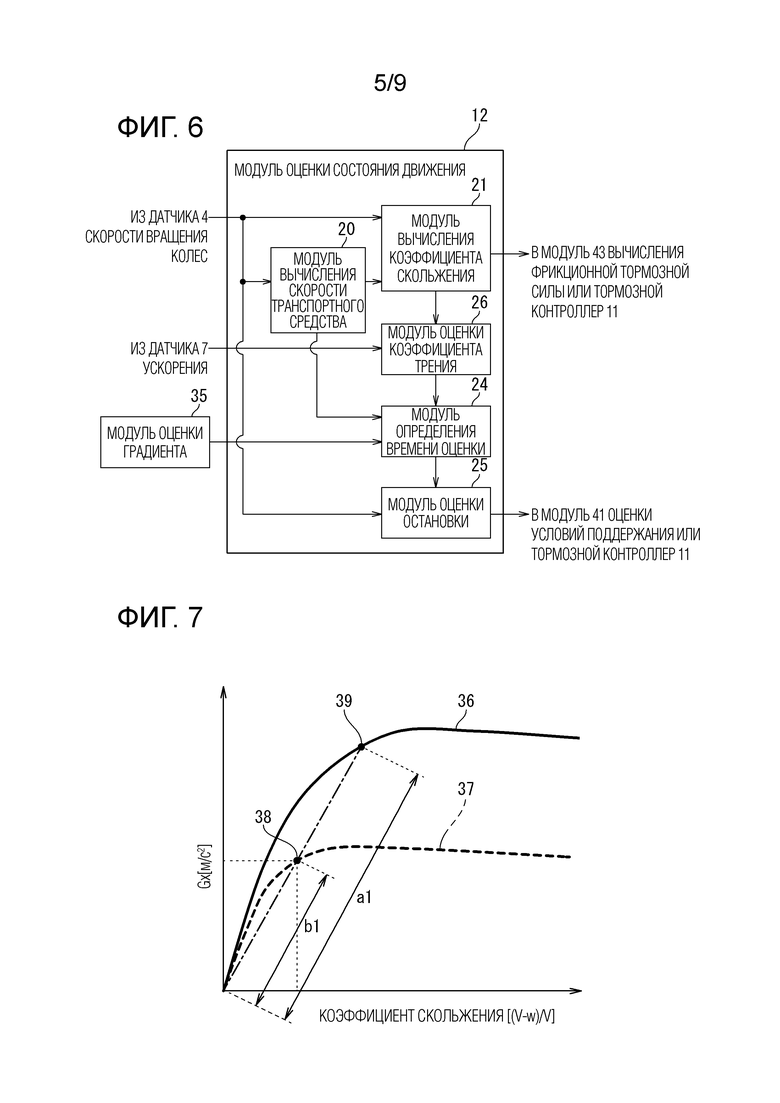
Фиг. 6 является блок-схемой, иллюстрирующей пример функциональной конфигурации модуля оценки состояния движения согласно второму варианту осуществления;
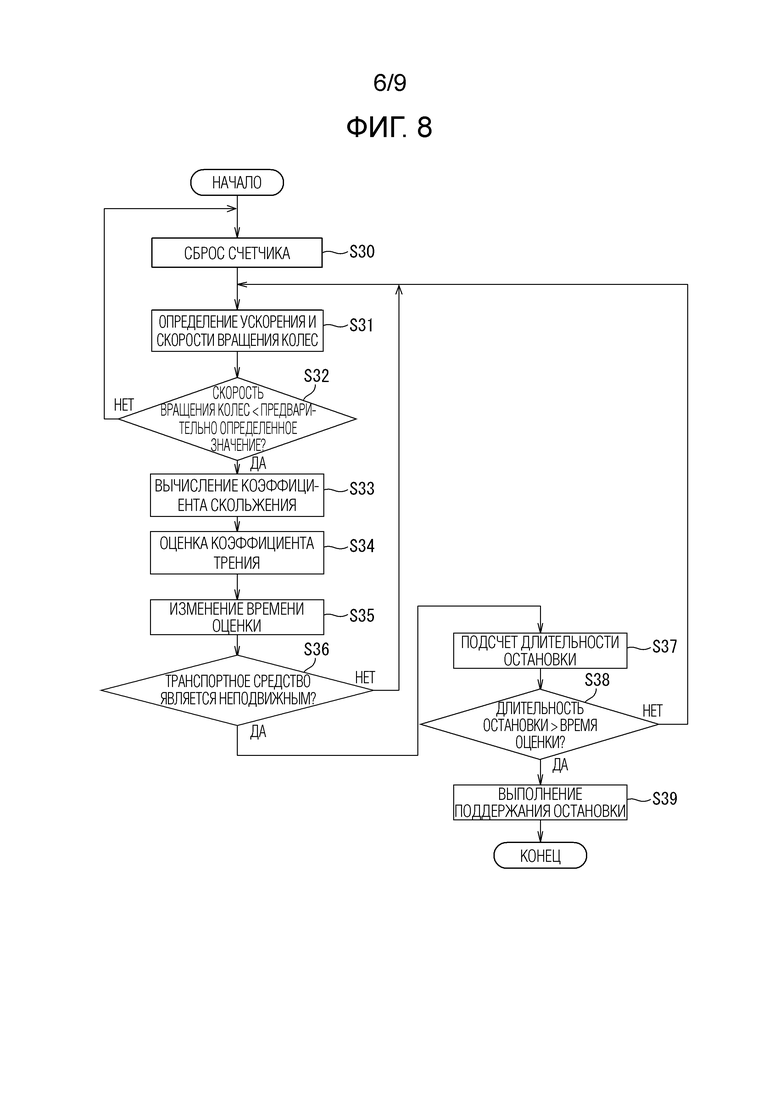
Фиг. 7 является графиком для пояснения примера способа для оценки коэффициента трения;
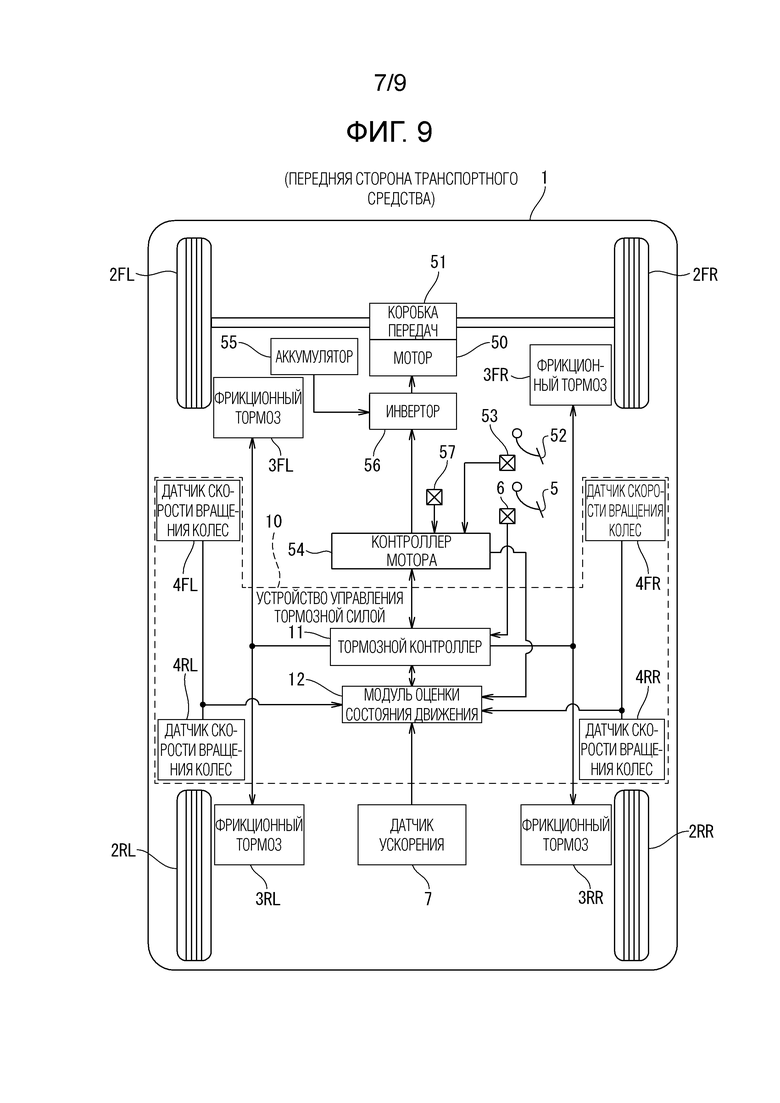
Фиг. 8 является блок-схемой последовательности операций, иллюстрирующей пример способа управления тормозной силой согласно второму варианту осуществления;
Фиг. 9 является блок-схемой, иллюстрирующей пример конфигурации транспортного средства, включающего в себя контроллер тормозной силы согласно третьему варианту осуществления;
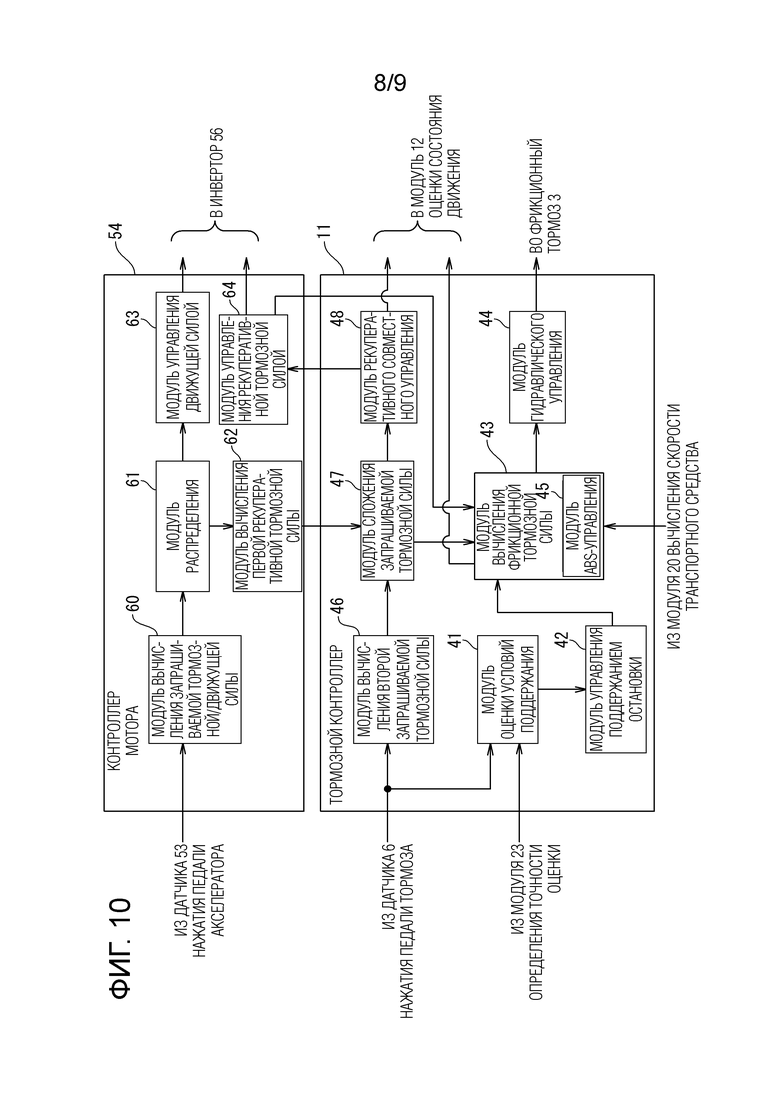
Фиг. 10 является блок-схемой, иллюстрирующей пример функциональной конфигурации тормозного контроллера и контроллера мотора согласно третьему варианту осуществления; и
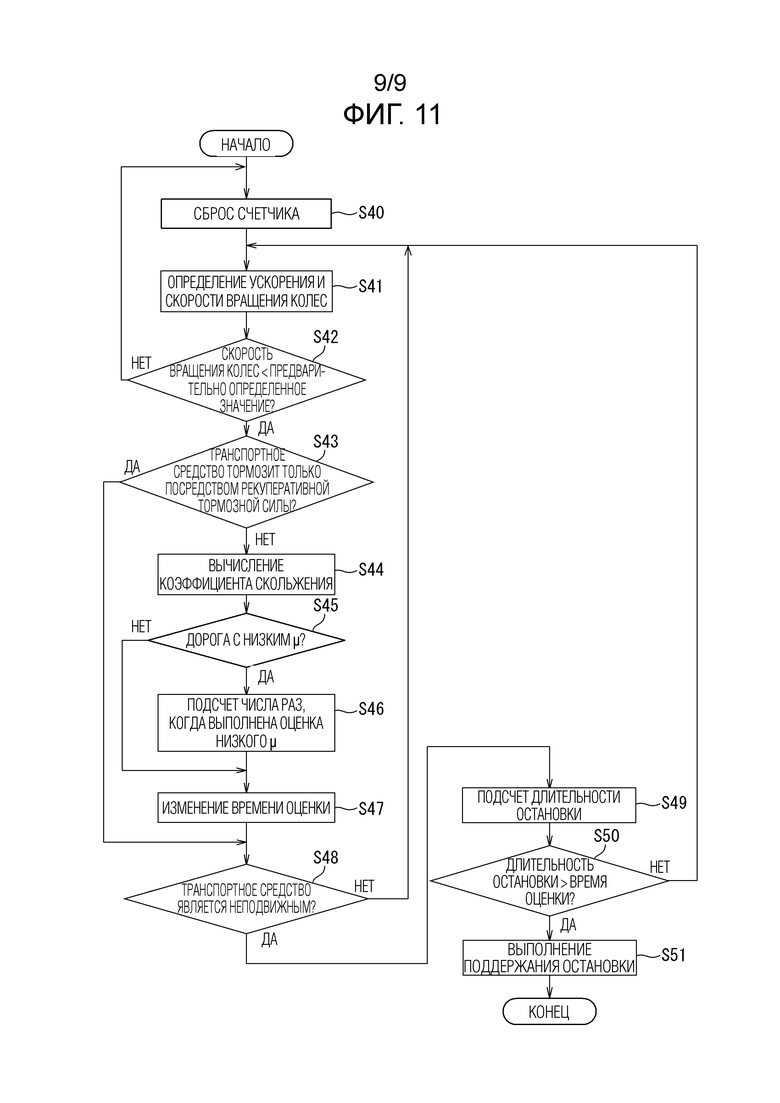
Фиг. 11 является блок-схемой последовательности операций, иллюстрирующей пример способа управления тормозной силой согласно третьему варианту осуществления.
Подробное описание вариантов осуществления
[0008] Ниже описываются варианты осуществления настоящего изобретения со ссылкой на чертежи.
Первый вариант осуществления
Конфигурация
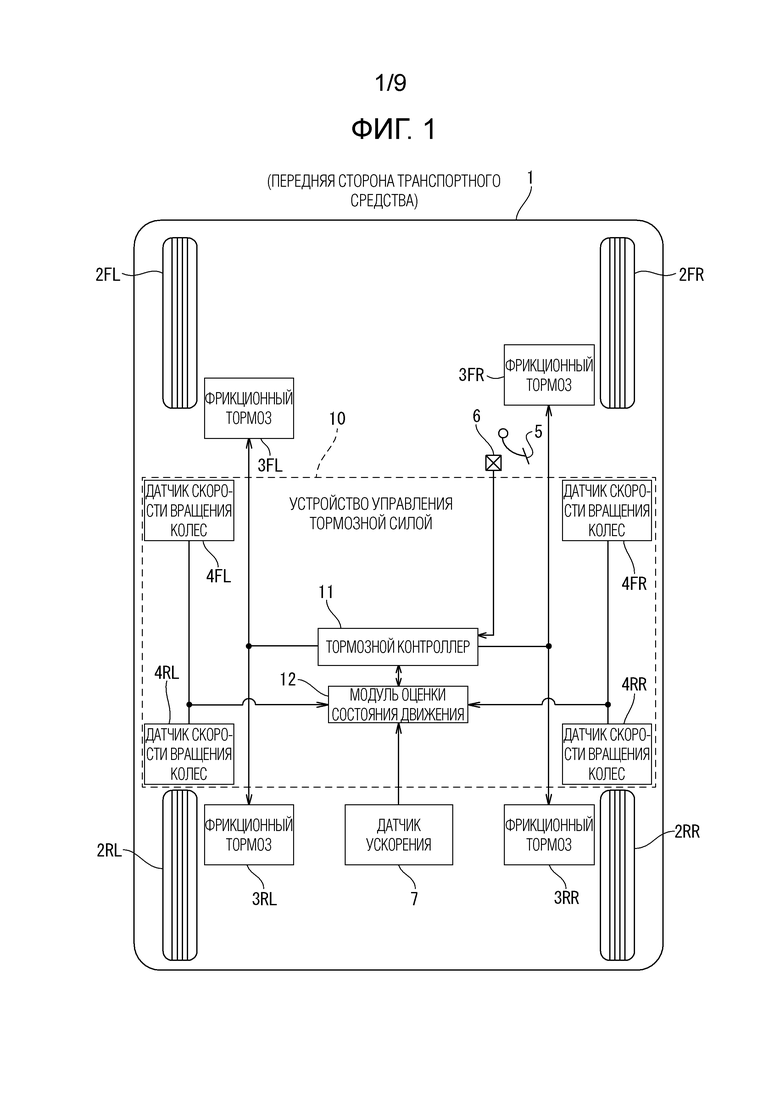
Следует обратиться к фиг. 1 в данном документе. Контроллер тормозной силы согласно первому варианту осуществления размещен, например, в транспортном средстве 1. Ссылки с номерами 2FR, 2FL, 2RR и 2RL обозначают правое переднее колесо, левое переднее колесо, правое заднее колесо и левое заднее колесо, соответственно, транспортного средства 1. Ссылки с номерами 3FR, 3FL, 3RR и 3RL обозначают фрикционные тормоза, которые прикладывают фрикционные тормозные силы к правому переднему колесу 2FR, левому переднему колесу 2FL, правому заднему колесу 2RR и левому заднему колесу 2RL, соответственно. Ссылки с номерами 4FR, 4FL, 4RR и 4RL обозначают датчики скорости вращения колес, которые определяют скорости правого переднего колеса 2FR, левого переднего колеса 2FL, правого заднего колеса 2RR и левого заднего колеса 2RL, соответственно.
[0009] Ссылка с номером 5 обозначает педаль тормоза для предоставления возможности водителю нажимать тормоз, который прикладывает тормозную силу к транспортному средству 1. Ссылка с номером 6 обозначает датчик нажатия педали тормоза, который определяет рабочую величину (рабочую величину надавливания) нажатия педали 5 тормоза водителем транспортного средства 1. Ссылка с номером 7 обозначает датчик ускорения, который определяет ускорение Gx вперед и назад транспортного средства 1.
Правое переднее колесо 2FR, левое переднее колесо 2FL, правое заднее колесо 2RR и левое заднее колесо 2RL иногда совместно называются "колесами 2" или "колесом 2" в дальнейшем. Фрикционные тормоза 3FR, 3FL, 3RR и 3RL иногда совместно называются "фрикционными тормозами 3" или "фрикционным тормозом 3" в дальнейшем. Датчики 4FR, 4FL, 4RR и 4RL скорости вращения колес иногда совместно называются "датчиками 4 скорости вращения колес" или "датчиком 4 скорости вращения колес" в дальнейшем.
[0010] Контроллер 10 тормозной силы включает в себя датчики 4 скорости вращения колес, тормозной контроллер 11 и модуль 12 оценки состояния движения.
Тормозной контроллер 11 и модуль 12 оценки состояния движения представляют собой примеры контроллера, описанного в формуле изобретения. Каждый из тормозного контроллера 11 и модуля 12 оценки состояния движения реализуется как электронный модуль управления, включающий в себя CPU (центральный процессор) и периферийный компонент CPU, такой как ROM (постоянное запоминающее устройство) и RAM (оперативное запоминающее устройство). CPU электронного модуля управления выполняет обработку, которая должна выполняться посредством тормозного контроллера 11 и модуля 12 оценки состояния движения, посредством выполнения компьютерной программы, сохраненной на носителе хранения данных. Тормозной контроллер 11 и модуль 12 оценки состояния движения могут реализовываться как отдельные электронные модули управления или как один электронный модуль управления.
[0011] Модуль 12 оценки состояния движения принимает сигнал, определенный посредством датчика 4 скорости вращения колес, и определяет то, остановлено или нет транспортное средство 1, на основе скорости w вращения колеса 2, указываемой посредством сигнала, определенного посредством датчика 4 скорости вращения колес. Например, модуль 12 оценки состояния движения может определять то, что транспортное средство 1 остановлено, когда скорость w вращения колес опускается ниже предварительно определенного значения. Например, модуль 12 оценки состояния движения может определять то, что транспортное средство 1 остановлено, когда скорость w вращения колес становится нулевой.
В области низких скоростей, в которой транспортное средство 1 имеет скорость ниже первого порогового значения Vt1 скорости (например, 2-3 км/ч), для датчика 4 скорости вращения колес может быть затруднительным определять скорость V транспортного средства. Следовательно, модуль 12 оценки состояния движения может ожидать до тех пор, пока не определяется то, равна или нет скорость w вращения колеса 2 нулю в течение предварительно определенного времени Td оценки. Другими словами, модуль 12 оценки состояния движения может определять то, что транспортное средство 1 остановлено, когда скорость w вращения колеса 2 равна нулю в течение предварительно определенного времени Td оценки.
Модуль 12 оценки состояния движения выводит результат оценки остановки, указывающий то, что определяется то, что транспортное средство 1 остановлено, в тормозной контроллер 11.
[0012] Тормозной контроллер 11 определяет то, находится или нет транспортное средство 1 в состоянии, в котором тормозная сила прикладывается к нему. Когда результат оценки остановки принимается из модуля 12 оценки состояния движения в состоянии, в котором тормозная сила прикладывается к транспортному средству 1, тормозной контроллер 11 формирует, посредством фрикционного тормоза 3, тормозную силу для поддержания остановленного состояния транспортного средства 1 независимо от того, нажимается или нет педаль 5 тормоза водителем.
Например, тормозной контроллер 11 считывает сигнал определения рабочей величины нажатия педали 5 тормоза, выводимый из датчика 6 нажатия педали тормоза. Когда рабочая величина нажатия педали 5 тормоза превышает предварительно определенную величину, тормозной контроллер 11 определяет то, что транспортное средство 1 находится в состоянии, в котором тормозная сила прикладывается к нему посредством операции нажатия педали тормоза водителем. Когда результат оценки остановки принимается в состоянии, в котором тормозная сила прикладывается к транспортному средству 1 посредством операции нажатия педали тормоза водителем, тормозной контроллер 11 формирует, посредством фрикционного тормоза 3, тормозную силу для поддержания остановленного состояния транспортного средства 1 независимо от того, нажимается или нет педаль 5 тормоза.
Тормозная сила для поддержания остановленного состояния транспортного средства 1, независимо от того, нажимается или нет педаль 5 тормоза водителем, прикладываемая, когда результат оценки остановки принимается из модуля 12 оценки состояния движения в состоянии, в котором тормозная сила прикладывается к транспортному средству 1, называется "удерживающей тормозной силой" в дальнейшем.
[0013] Когда коэффициент трения поверхности дороги в пути движения транспортного средства 1 является низким, даже если скорость V транспортного средства выше относительно области низких скоростей меньше вышеуказанного первого порогового значения Vt1 скорости, скорость w вращения колес может, по-видимому, становиться нулевой после блокирования колеса 2. В этом случае, требуется длительное время для того, чтобы фактически останавливать транспортное средство 1.
Модуль 12 оценки состояния движения в силу этого предотвращает приложение удерживающей тормозной силы до того, как скорость V транспортного средства снизится в достаточной степени, посредством задержки периода, в который тормозной контроллер 11 формирует удерживающую тормозную силу, в соответствии с коэффициентом трения поверхности дороги.
[0014] Например, модуль 12 оценки состояния движения может задерживать период, в который формируется удерживающая тормозная сила, посредством задержки периода, в который результат оценки остановки выводится в тормозной контроллер 11, в соответствии с коэффициентом трения поверхности дороги. Например, модуль 12 оценки состояния движения может задерживать период, в который формируется удерживающая тормозная сила, посредством задания большим времени Td оценки, причем время Td оценки представляет собой длительность до тех пор, пока не определяется то, что транспортное средство 1 остановлено после того, как скорость w вращения колес становится нулевой. Время Td оценки представляет собой пример предварительно определенного времени, описанного в формуле изобретения.
Таким образом, задержка периода, в который формируется удерживающая тормозная сила, в соответствии с коэффициентом трения поверхности дороги, позволяет предотвращать поддержание удерживающей тормозной силы до того, как скорость V транспортного средства снизится в достаточной степени (например, перед остановкой транспортного средства) на поверхности дороги, которая может иметь низкий коэффициент трения. Например, задержка периода, в который формируется удерживающая тормозная сила, чтобы предоставлять водителю период отсрочки для разблокировки колеса 2, позволяет предотвращать препятствование удерживающей тормозной силой операции разблокировки водителем.
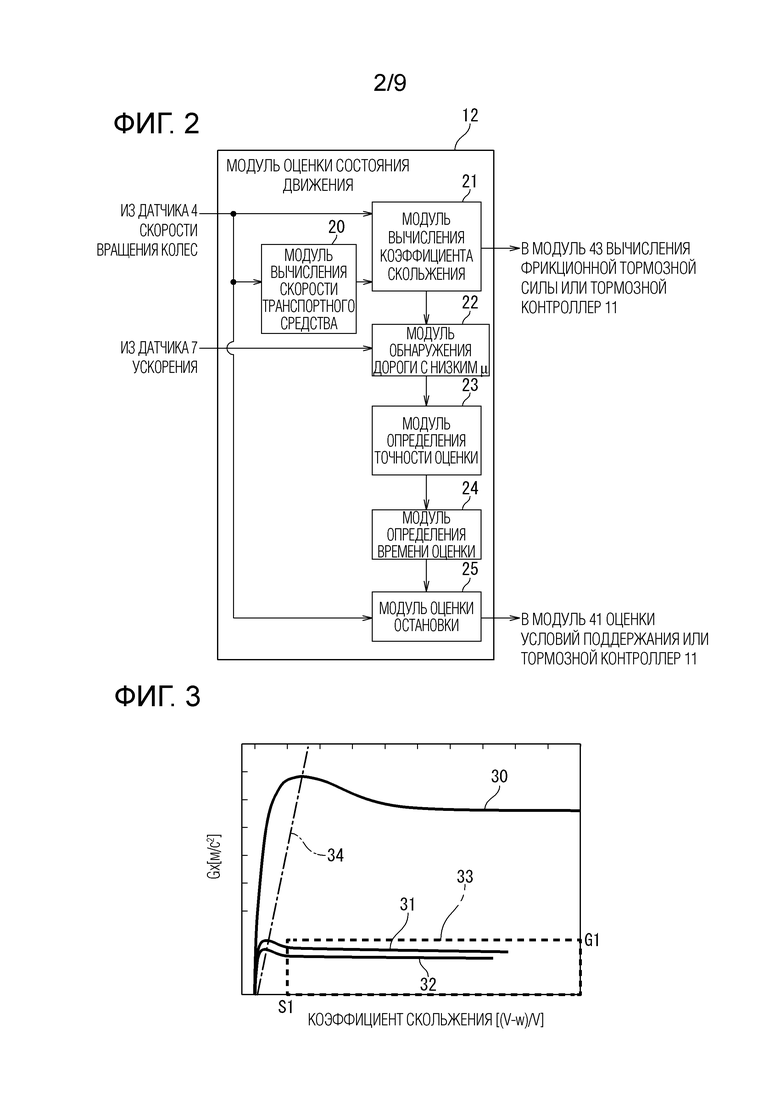
[0015] Следует обратиться к фиг. 2 в данном документе. Модуль 12 оценки состояния движения включает в себя модуль 20 вычисления скорости транспортного средства, модуль 21 вычисления коэффициента скольжения, модуль 22 обнаружения дороги с низким μ, модуль 23 определения точности оценки, модуль 24 определения времени оценки и модуль 25 оценки остановки.
Модуль 20 вычисления скорости транспортного средства вычисляет скорость V транспортного средства 1, на основе скорости w вращения колес, указываемой посредством сигнала, определенного посредством датчика 4 скорости вращения колес. Модуль 20 вычисления скорости транспортного средства выводит информацию относительно вычисленной скорости V транспортного средства в модуль 21 вычисления коэффициента скольжения.
Модуль 21 вычисления коэффициента скольжения вычисляет коэффициент ((V-w)/V) скольжения, на основе скорости V транспортного средства 1 и скорости w вращения колес для колеса 2.
[0016] Модуль 21 вычисления коэффициента скольжения может вычислять коэффициент скольжения в области выше по скорости относительно области низких скоростей меньше первого порогового значения Vt1 скорости, в которой трудно определять фактическую скорость V транспортного средства из сигнала, определенного посредством датчика 4 скорости вращения колес. Например, модуль 21 вычисления коэффициента скольжения может вычислять коэффициент S скольжения в области скоростей меньше второго порогового значения Vt2 скорости (например, 10 км/ч) выше первого порогового значения Vt1 скорости. Модуль 20 вычисления скорости транспортного средства может получать скорость V транспортного средства с использованием, например, GPS (глобальной системы позиционирования) или оптического измерителя скорости относительно земли, чтобы предотвращать влияние, которое скольжение колеса 2 на поверхности дороги, имеющей низкий коэффициент трения, оказывает на вычисление скорости V транспортного средства.
Модуль 21 вычисления коэффициента скольжения выводит вычисленный коэффициент S скольжения в модуль 22 обнаружения дороги с низким μ.
[0017] Модуль 22 обнаружения дороги с низким μ принимает коэффициент S скольжения из модуля 21 вычисления коэффициента скольжения. Модуль 22 обнаружения дороги с низким μ дополнительно принимает ускорение Gx вперед и назад транспортного средства 1 из датчика 7 ускорения. Модуль 22 обнаружения дороги с низким μ оценивает то, ниже или нет коэффициент трения поверхности дороги в пути движения транспортного средства 1 предварительно определенного порогового значения коэффициента трения, на основе коэффициента S скольжения и ускорения Gx. Дорога, имеющая поверхность, демонстрирующую коэффициент трения ниже порогового значения коэффициента трения, иногда называется "дорогой с низким μ" в дальнейшем.
Следует обратиться к фиг. 3 в данном документе. Сплошные линии 30, 31 и 32 указывают характеристические кривые шины, представляющие взаимосвязи между коэффициентом S скольжения и ускорением Gx вперед и назад на соответствующих поверхностях дороги, имеющих различные коэффициенты трения. Например, сплошная линия 30 указывает характеристическую кривую для влажной поверхности дороги, сплошная линия 31 указывает характеристическую кривую для базальтовой поверхности дороги, и сплошная линия 32 указывает характеристическую кривую для плиточной поверхности дороги.
[0018] Например, модуль 22 обнаружения дороги с низким μ оценивает то, что путь движения транспортного средства 1 находится на дороге с низким μ, когда комбинация вычисленного значения коэффициента S скольжения и определенного значения ускорения Gx попадает в область 33 оценки низкого μ, ограниченную посредством пунктирной линии.
Например, область 33 оценки низкого μ может задаваться в диапазоне, представленном посредством неравенства Gx<α*S, при условии, что прямая линия 34, соединяющая пики множества различных характеристических кривых 30, 31 и 32, задается посредством Gx=α*S. Коэффициент α представляет уклон прямой линии 34. Другими словами, область 33 оценки низкого μ может задаваться в диапазоне, имеющем ускорение Gx ниже произведения коэффициента S скольжения и уклона α на характеристической схеме шины, представляющей взаимосвязь между коэффициентом S скольжения и ускорением Gx вперед и назад.
[0019] Задание области 33 оценки низкого μ в силу этого позволяет предотвращать ошибочную оценку дороги, имеющей поверхность, демонстрирующую относительно высокий коэффициент трения, в качестве дороги с низким μ.
Верхний предел G1 ускорения Gx в области 33 оценки низкого μ может задаваться в качестве максимального значения, которое характеристическая кривая поверхности дороги, имеющей пороговое значение коэффициента трения, заданное в качестве коэффициента трения поверхности дороги, которая должно оцениваться в качестве дороги с низким μ, может принимать в диапазоне, представленном посредством неравенства Gx<α*S. Нижний предел S1 коэффициента S скольжения в области 33 оценки низкого μ может задаваться равным (G1/α) или больше.
[0020] Модуль 22 обнаружения дороги с низким μ может получать тормозную силу F, сформированную на колесе 2, вместо ускорения Gx вперед и назад. Например, модуль 22 обнаружения дороги с низким μ может принимать информацию относительно тормозной силы F, сформированной на колесе 2, из тормозного контроллера 11, который управляет целевой тормозной силой, сформированной на колесе 2.
Модуль 22 обнаружения дороги с низким μ может оценивать то, находится или нет путь движения транспортного средства 1 на дороге с низким μ, на основе коэффициента S скольжения и тормозной силы F.
Характеристическая кривая шины, представляющая взаимосвязь между коэффициентом S скольжения и тормозной силой F, демонстрирует характеристику, аналогичную характеристике характеристической кривой шины, представляющей взаимосвязь между коэффициентом S скольжения и ускорением Gx вперед и назад. Модуль 22 обнаружения дороги с низким μ может оценивать то, находится или нет путь движения транспортного средства 1 на дороге с низким μ, с использованием тормозной силы F, аналогично ускорению Gx. Модуль 22 обнаружения дороги с низким μ выводит результат оценки дороги с низким μ в модуль 23 определения точности оценки.
[0021] Модуль 23 определения точности оценки определяет точность оценки коэффициента трения посредством модуля 22 обнаружения дороги с низким μ, т.е. точность оценки того, что путь движения транспортного средства 1 находится на дороге с низким μ.
Например, модуль 23 определения точности оценки определяет точность оценки коэффициента трения в соответствии с числом раз, когда модуль 22 обнаружения дороги с низким μ многократно определяет то, что путь движения транспортного средства 1 находится на дороге с низким μ в период, в который скорость V транспортного средства ниже второго порогового значения Vt2 скорости. Например, модуль 23 определения точности оценки может определять большую точность для большего числа раз, когда определено то, что путь движения транспортного средства 1 находится на дороге с низким μ. Например, модуль 23 определения точности оценки может определять точность, пропорциональную числу раз, когда определено то, что путь движения транспортного средства 1 находится на дороге с низким μ.
[0022] Когда модуль 22 обнаружения дороги с низким μ оценивает дорогу с низким μ в предварительно определенном цикле T оценки, модуль 23 определения точности оценки может определять точность оценки коэффициента трения в соответствии с суммарным временем, заданным в качестве произведения числа раз, когда определено то, что путь движения транспортного средства 1 находится на дороге с низким μ, и цикла T оценки. Модуль 23 определения точности оценки может определять большую точность для большего суммарного времени, например, может определять точность, пропорциональную суммарному времени.
Модуль 23 определения точности оценки выводит определенную точность в модуль 24 определения времени оценки.
[0023] Модуль 24 определения времени оценки определяет время Td оценки в соответствии с точностью, принимаемой из модуля 23 определения точности оценки. Это выполняется, поскольку затруднительно обеспечивать данную точность оценки дороги с низким μ вследствие влияния вибрации кузова транспортного средства и т.п. С учетом этого, модуль 24 определения времени оценки определяет время Td оценки в соответствии с точностью оценки коэффициента трения посредством модуля 22 обнаружения дороги с низким μ, чтобы предотвращать необязательное продление времени Td оценки посредством результата оценки с низкой точностью.
Например, когда дорога с низким μ не обнаруживается посредством модуля 22 обнаружения дороги с низким μ, и выходное значение из модуля 23 определения точности оценки равно 0, модуль 24 определения времени оценки может задавать время Td оценки равным предварительно определенному значению T0, и может задавать время Td оценки большим по мере того, как выходное значение (т.е. точность) из модуля 23 определения точности оценки больше.
Например, модуль 24 определения времени оценки может задавать время Td оценки таким образом, что время Td оценки является пропорциональным выходному значению (т.е. точности оценки коэффициента трения) из модуля 23 определения точности оценки, и время Td оценки принимает предварительно определенное значение T0, когда выходное значение, выводимое из модуля 23 определения точности оценки, равно 0.
Помимо этого, например, когда дорога с низким μ не обнаруживается посредством модуля 22 обнаружения дороги с низким μ, и выходное значение из модуля 23 определения точности оценки равно или меньше предварительно определенного порогового значения, модуль 24 определения времени оценки может задавать время Td оценки равным предварительно определенному значению T0, и когда дорога с низким μ не обнаруживается посредством модуля 22 обнаружения дороги с низким μ, и выходное значение из модуля 23 определения точности оценки превышает предварительно определенное пороговое значение, модуль 24 определения времени оценки может задавать время Td оценки большим предварительно определенного значения T0.
[0024] Модуль 24 определения времени оценки может задавать время Td оценки равным предварительно определенному значению T0, когда дорога с низким μ не обнаруживается, и может определять время Td оценки в соответствии с точностью оценки коэффициента трения, когда дорога с низким μ обнаруживается. Другими словами, модуль 24 определения времени оценки определяет время Td оценки в соответствии с коэффициентом трения поверхности дороги и точностью оценки этого коэффициента трения и задерживает период, в который тормозной контроллер 11 формирует удерживающую тормозную силу. Предварительно определенное значение T0, например, может составлять 0,5 секунд.
[0025] Верхний предел может задаваться для времени Td оценки. Верхний предел времени Td оценки может задаваться равным, например, времени (например, 2,0 секунды), достаточному для водителя, имеющему навыки в самостоятельном прекращении заблокированного состояния, чтобы выявлять блокирование шины и разблокировать педаль 5 тормоза. Альтернативно, время Td оценки может задаваться большим с тем, чтобы исключать базирование на навыках водителя.
Модуль 24 определения времени оценки выводит определенное время Td оценки в модуль 25 оценки остановки.
Модуль 25 оценки остановки определяет то, что транспортное средство 1 остановлено, когда скорость w вращения колес равна нулю для времени Td оценки. Другими словами, определяется то, что транспортное средство 1 остановлено, когда длительность остановки, в течение которой продолжается состояние, в котором скорость w вращения колес равна нулю, превышает время Td оценки.
Модуль 25 оценки остановки выводит результат оценки остановки, указывающий то, что определяется то, что транспортное средство 1 остановлено, в тормозной контроллер 11.
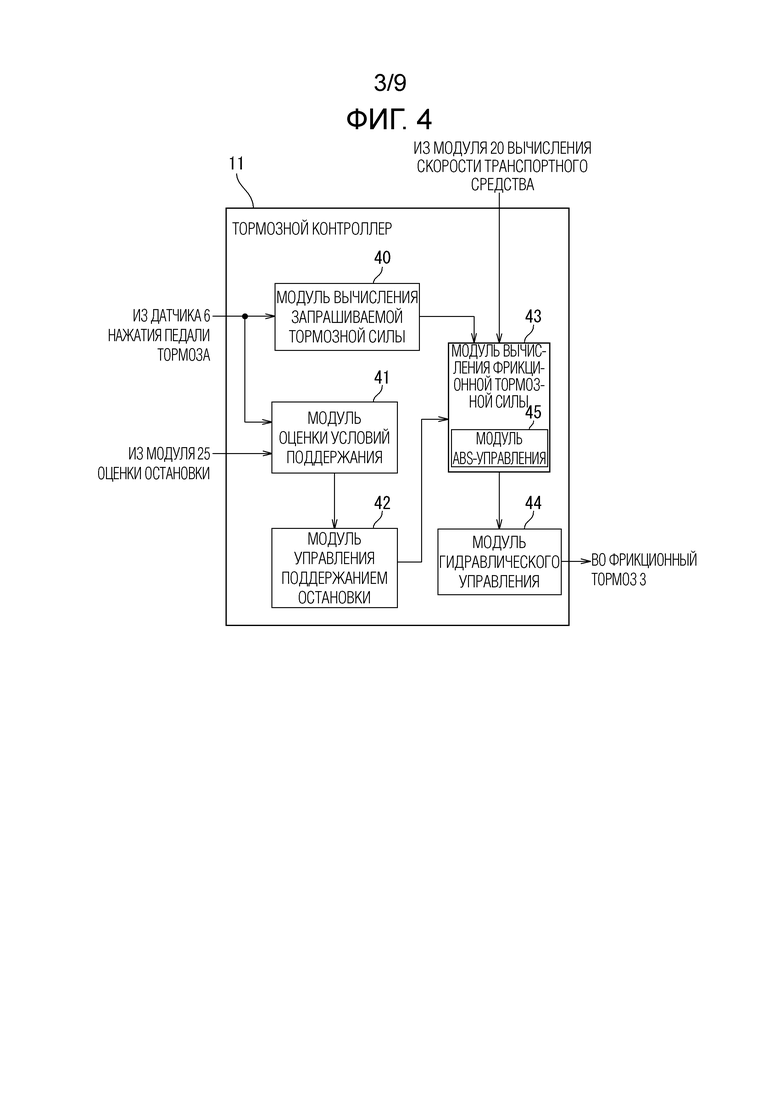
[0026] Следует обратиться к фиг. 4 в данном документе. Тормозной контроллер 11 включает в себя модуль 40 вычисления запрашиваемой тормозной силы, модуль 41 оценки условий поддержания, модуль 42 управления поддержанием остановки, модуль 43 вычисления фрикционной тормозной силы и модуль 44 гидравлического управления.
Модуль 40 вычисления запрашиваемой тормозной силы считывает сигнал определения рабочей величины нажатия педали 5 тормоза, выводимый из датчика 6 нажатия педали тормоза. Модуль 40 вычисления запрашиваемой тормозной силы вычисляет запрашиваемую тормозную силу в качестве запрашиваемого значения для тормозной силы согласно рабочей величине нажатия педали 5 тормоза. Модуль 40 вычисления запрашиваемой тормозной силы выводит информацию относительно запрашиваемой тормозной силы в модуль 43 вычисления фрикционной тормозной силы.
[0027] Модуль 41 оценки условий поддержания считывает сигнал определения рабочей величины нажатия педали 5 тормоза, выводимый из датчика 6 нажатия педали тормоза. Модуль 41 оценки условий поддержания принимает из модуля 25 оценки остановки результат оценки остановки, указывающий то, что определяется то, что транспортное средство 1 остановлено.
Модуль 41 оценки условий поддержания определяет то, должна или нет удерживающая тормозная сила формироваться, посредством фрикционного тормоза 3 независимо от того, нажимается или нет педаль 5 тормоза водителем, в соответствии с рабочей величиной нажатия педали 5 тормоза и результатом оценки остановки.
[0028] Например, модуль 41 оценки условий поддержания определяет то, что удерживающая тормозная сила должна формироваться посредством фрикционного тормоза 3, когда удовлетворяются следующие условия A1 и A2:
(A1) Транспортное средство 1 находится в состоянии, в котором тормозная сила прикладывается к нему. Например, когда рабочая величина нажатия педали 5 тормоза превышает предварительно определенную величину, модуль 41 оценки условий поддержания определяет то, что транспортное средство 1 находится в состоянии, в котором тормозная сила прикладывается к нему посредством операции нажатия педали тормоза водителем.
(A2) Результат оценки остановки, указывающий то, что определяется то, что транспортное средство 1 остановлено, принимается из модуля 25 оценки остановки.
[0029] Когда определяется то, что удерживающая тормозная сила должна формироваться посредством фрикционного тормоза 3, модуль 41 оценки условий поддержания выводит инструкцию поддержания остановки для формирования удерживающей тормозной силы посредством фрикционного тормоза 3 в модуль 42 управления поддержанием остановки.
При приеме инструкции поддержания остановки, модуль 42 управления поддержанием остановки выводит информацию относительно удерживающей тормозной силы в модуль 43 вычисления фрикционной тормозной силы.
Модуль 43 вычисления фрикционной тормозной силы вычисляет фрикционную тормозную силу, которая должна формироваться посредством фрикционного тормоза 3, в соответствии с тормозной силой, обозначенной из модуля 40 вычисления запрашиваемой тормозной силы или модуля 43 вычисления фрикционной тормозной силы.
Модуль 43 вычисления фрикционной тормозной силы может включать в себя модуль 45 управления ABS (антиблокировочной тормозной системой), который прекращает блокирование колеса 2, возникающее посредством фрикционной тормозной силы, прикладываемой к колесу 2. Например, модуль 45 ABS-управления уменьшает тормозную силу, сформированную посредством фрикционного тормоза 3, на основе инструкции из модуля 40 вычисления запрашиваемой тормозной силы, в соответствии с коэффициентом S скольжения, принимаемым из модуля 21 вычисления коэффициента скольжения.
Модуль 44 гидравлического управления прикладывает фрикционную тормозную силу к колесу 2 посредством управления гидравлическим давлением фрикционного тормоза 3 в соответствии с тормозной силой, вычисленной посредством модуля 43 вычисления фрикционной тормозной силы.
[0030] Работа
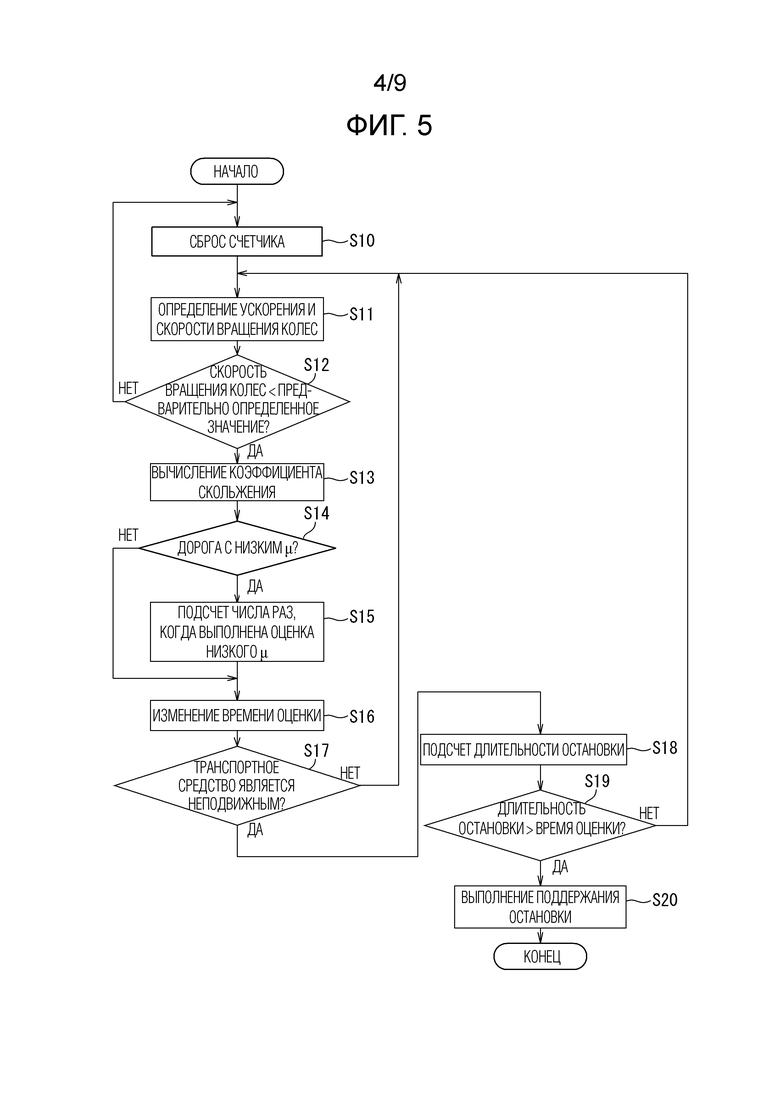
Ниже описывается работа контроллера 10 тормозной силы согласно первому варианту осуществления. Следует обратиться к фиг. 5 в данном документе.
На этапе S10, модуль 23 определения точности оценки сбрасывает до 0 счетчик для подсчета числа раз, когда определено то, что путь движения транспортного средства 1 находится на дороге с низким μ. Модуль 25 оценки остановки дополнительно сбрасывает до 0 счетчик таймера для подсчета длительности остановки, заданной в качестве длительности, в течение которой состояние, в котором скорость w вращения колес равна нулю (т.е. состояние, в котором определяется то, что транспортное средство 1 является неподвижным), продолжается.
На этапе S11, датчик 7 ускорения определяет ускорение Gx вперед и назад транспортного средства 1. Датчик 4 скорости вращения колес определяет скорость колеса 2.
[0031] На этапе S12, модуль 20 вычисления скорости транспортного средства вычисляет скорость V транспортного средства 1. Модуль 12 оценки состояния движения определяет то, ниже или нет скорость V транспортного средства предварительно определенного второго порогового значения Vt2 скорости. Если скорость V транспортного средства ниже предварительно определенного второго порогового значения Vt2 скорости (этап S12:Y), процесс переходит к этапу S13. Если скорость V транспортного средства равна или выше предварительно определенного второго порогового значения Vt2 скорости (этап S12:N), процесс возвращается к этапу S10.
На этапе S13, модуль 21 вычисления коэффициента скольжения вычисляет коэффициент S скольжения.
[0032] На этапе S14, модуль 22 обнаружения дороги с низким μ определяет то, находится или нет путь движения транспортного средства 1 на дороге с низким μ. Если путь движения транспортного средства 1 находится на дороге с низким μ (этап S14:Y), процесс переходит к этапу S15. Если путь движения транспортного средства 1 не находится на дороге с низким μ (этап S14:N), процесс переходит к этапу S16.
На этапе S15, модуль 23 определения точности оценки выполняет приращение на единицу значения счетчика для подсчета числа раз, когда определено то, что путь движения транспортного средства 1 находится на дороге с низким μ.
На этапе S16, модуль 24 определения времени оценки изменяет время Td оценки в соответствии с числом раз, когда определено то, что путь движения транспортного средства 1 находится на дороге с низким μ.
[0033] На этапе S17, модуль 25 оценки остановки определяет то, является или нет транспортное средство 1 неподвижным, в соответствии с тем, равна или нет скорость w вращения колес нулю. Если транспортное средство 1 является неподвижным (этап S17:Y), процесс переходит к этапу S18. Если транспортное средство 1 не является неподвижным (этап S17:N), процесс возвращается к этапу S11.
На этапе S18, модуль 25 оценки остановки подсчитывает длительность остановки. Например, значение счетчика таймера для подсчета длительности остановки постепенно увеличивается, чтобы увеличивать длительность остановки на продолжительность, соответствующую циклу T оценки дороги с низким μ.
[0034] На этапе S19, модуль 25 оценки остановки определяет то, превышает или нет длительность остановки время Td оценки. Если длительность остановки превышает время Td оценки (этап S19:Y), процесс переходит к этапу S20. Если длительность остановки не превышает время Td оценки (этап S19:N), процесс возвращается к этапу S11.
На этапе S12, который выполняется после этого, когда скорость V транспортного средства повышается и становится равной или превышающей второе пороговое значение Vt2 скорости ("Нет" на этапе S12), коэффициент трения поверхности дороги предположительно должен изменяться вследствие изменения состояния движения транспортного средства 1. Следовательно, процесс возвращается к этапу S10, на котором счетчики для подсчета числа раз, когда выполнена оценка дороги с низким μ, и длительности остановки сбрасываются до 0.
На этапе S20, модуль 41 оценки условий поддержания выводит инструкцию поддержания остановки для формирования удерживающей тормозной силы даже после остановки транспортного средства 1. Тормозная сила, сформированная посредством фрикционного тормоза 3 при остановке транспортного средства 1, поддерживается или увеличивается в соответствии с инструкцией поддержания остановки, чтобы поддерживать остановленное состояние этого транспортного средства. После этого процесс завершается.
[0035] Преимущества первого варианта осуществления
(1) Тормозной контроллер 11 прикладывает тормозную силу к транспортному средству 1 при операции нажатия педали 5 тормоза водителем, определяет то, остановлено или нет транспортное средство 1, на основе скорости вращения колес, прикладывает тормозную силу к транспортному средству 1, независимо от того, нажимается или нет педаль 5 тормоза, после истечения предварительно определенного времени после того, как определяется то, что это транспортное средство остановлено, и задает предварительно определенное время большим тогда, когда трение поверхности дороги, по которой движется транспортное средство 1, является низким, чем тогда, когда трение поверхности дороги является высоким.
Это позволяет предотвращать поддержание удерживающей тормозной силы до того, как скорость V транспортного средства снизится в достаточной степени на поверхности дороги с низким коэффициентом трения.
[0036] Следовательно, например, задержка периода, в который формируется удерживающая тормозная сила, чтобы предоставлять водителю период отсрочки для разблокировки колеса 2, позволяет предотвращать затруднение удерживающей тормозной силой операции разблокировки водителем.
Помимо этого, например, на поверхности дороги, имеющей низкий коэффициент трения, формирование удерживающей тормозной силы может задерживаться после того, как определяется то, что транспортное средство 1 остановлено, на основе скорости w вращения колес, до ожидаемого момента времени, когда транспортное средство 1 фактически останавливается.
Кроме того, например, можно предотвращать затруднение работы модуля 45 ABS-управления посредством удерживающей тормозной силы.
[0037] (2) Модуль 24 определения времени оценки задает время Td оценки, используемое для того, чтобы определять то, остановлено или нет транспортное средство, на основе скорости вращения колес, большим тогда, когда трение поверхности дороги, по которой движения транспортного средства 1 является низким, чем тогда, когда трение поверхности дороги является высоким. Это обеспечивает возможность определения в отношении того, остановлено или нет транспортное средство 1, посредством задания времени Td оценки большим тогда, когда путь движения транспортного средства 1 находится на дороге с низким μ, чем тогда, когда этот путь движения не находится на дороге с низким μ. Это повышает точность оценки остановки транспортного средства 1.
[0038] (3) Модуль 22 обнаружения дороги с низким μ оценивает то, ниже или нет трение поверхности дороги первого предварительно определенного порогового значения. Модуль 23 определения точности оценки определяет то, выше или нет точность оценки трения поверхности дороги второго предварительно определенного порогового значения. Модуль 24 определения времени оценки задает время Td оценки большим тогда, когда трение поверхности дороги ниже первого предварительно определенного порогового значения, и точность выше второго предварительно определенного порогового значения, чем тогда, когда трение поверхности дороги ниже первого предварительно определенного порогового значения, и точность ниже второго предварительно определенного порогового значения. Это позволяет предотвращать необязательное продление времени Td оценки, когда точность оценки трения поверхности дороги является низкой.
(4) Модуль 20 вычисления скорости транспортного средства вычисляет скорость транспортного средства 1, на основе скорости w вращения колес. Модуль 23 определения точности оценки определяет то, что точность трения поверхности дороги является более высокой, когда суммарное время, в которое модуль 22 обнаружения дороги с низким μ многократно определяет то, что трение пути движения транспортного средства 1 ниже первого предварительно определенного порогового значения в период, в который скорость V транспортного средства ниже второго порогового значения Vt2 скорости, является большим, чем тогда, когда это суммарное время является небольшим. Альтернативно, модуль 23 определения точности оценки определяет то, что точность трения является более высокой тогда, когда число раз, когда модуль 22 обнаружения дороги с низким μ многократно определяет то, что трение пути движения транспортного средства 1 ниже первого предварительно определенного порогового значения в период, в который скорость V транспортного средства ниже второго порогового значения Vt2 скорости, является большим, чем тогда, когда это число раз является небольшим. Следовательно, с помощью конфигурации, которая оценивает то, находится или нет путь движения транспортного средства 1 на дороге с низким μ, может определяться точность оценки дороги с низким μ.
[0039] Второй вариант осуществления
Конфигурация
Ниже описывается второй вариант осуществления. Модуль 12 оценки состояния движения согласно второму варианту осуществления не оценивает то, находится или нет путь движения транспортного средства 1 на дороге с низким μ, но вместо этого оценивает значение коэффициента трения пути движения транспортного средства 1, т.е. максимальное ускорение при торможении, которое может формироваться на поверхности дороги в этом пути. Модуль 12 оценки состояния движения определяет время Td оценки, которое постепенно изменяется в ответ на изменение значения коэффициента трения.
Следует обратиться к фиг. 6 в данном документе. Ссылки с номерами, идентичные ссылкам с номерами в модуле 12 оценки состояния движения согласно первому варианту осуществления, обозначают идентичные компоненты, составляющие модуль 12 оценки состояния движения согласно второму варианту осуществления. Модуль 12 оценки состояния движения включает в себя модуль 26 оценки коэффициента трения, который оценивает коэффициент трения пути движения транспортного средства 1.
[0040] Модуль 26 оценки коэффициента трения может оценивать коэффициент трения пути движения транспортного средства 1 с использованием, например, следующего способа.
Следует обратиться к фиг. 7 в данном документе. Сплошная линия 36 указывает характеристическую кривую шины для представления взаимосвязи транспортного средства 1 между коэффициентом S скольжения на опорной поверхности дороги, имеющей известный коэффициент μ1 трения, и ускорением Gx вперед и назад.
При условии, что характеристическая кривая шины транспортного средства 1 на поверхности дороги в пути движения транспортного средства 1 представляет собой характеристическую кривую шины, указываемую посредством пунктирной линии 37, коэффициент трения поверхности дороги в пути движения транспортного средства 1 представляется посредством μ2 для удобства. Точка 38 указывает точку измерения, представляющую коэффициент S скольжения, вычисленный посредством модуля 21 вычисления коэффициента скольжения, и ускорение Gx вперед и назад, определенное посредством датчика 7 ускорения.
[0041] На характеристических кривых для поверхностей дороги, имеющих различные коэффициенты μ1 и μ2 трения, длины a1 и b1 прямых линий, полученных посредством соединительных точек 39 и 38, соответственно, с равным отношением (Gx/S) между ускорением Gx и коэффициентом S скольжения к началу координат, имеющему нулевое ускорение Gx и нулевой коэффициент S скольжения, вычисляются в данном документе. В этом случае, известно то, что отношение (a1/b1) между длинами a1 и b1 равно отношению (μ1/μ2) между коэффициентами μ1 и μ2 трения.
[0042] Модуль 26 оценки коэффициента трения в силу этого вычисляет отношение (Gx/S) ускорения Gx вперед и назад, определенное посредством датчика 7 ускорения, к коэффициенту S скольжения, вычисленному посредством модуля 21 вычисления коэффициента скольжения.
Модуль 26 оценки коэффициента трения вычисляет первую точку 39, которая обеспечивает возможность отношения ускорения вперед и назад к коэффициенту скольжения быть равным вычисленному отношению Gx/S на характеристической кривой 36 на опорной поверхности дороги.
Модуль 26 оценки коэффициента трения вычисляет первое расстояние a1 между началом координат и первой точкой 39.
Модуль 26 оценки коэффициента трения дополнительно вычисляет второе расстояние b1 между началом координат и точкой 38 измерения.
Модуль 26 оценки коэффициента трения вычисляет произведение ((μ1*b1)/a1) отношения (b1/a1) второго расстояния b1 к первому расстоянию a1, умноженного на коэффициент μ1 трения опорной поверхности дороги, в качестве коэффициента μ2 трения поверхности дороги в пути движения транспортного средства 1.
[0043] Модуль 26 оценки коэффициента трения может оценивать коэффициент μ2 трения с использованием характеристической кривой шины, представляющей взаимосвязь между коэффициентом S скольжения и тормозной силой F, сформированной на колесе 2, вместо характеристической кривой шины, представляющей взаимосвязь между коэффициентом S скольжения и ускорением Gx вперед и назад.
Модуль 26 оценки коэффициента трения вычисляет отношение (F/S) тормозной силы F на колесе 2, обозначенное посредством тормозного контроллера 11, к коэффициенту S скольжения, вычисленному посредством модуля 21 вычисления коэффициента скольжения.
[0044] Модуль 26 оценки коэффициента трения вычисляет первую точку, которая обеспечивает возможность отношения тормозной силы, сформированной на колесе 2, к коэффициенту скольжения быть равным вычисленному отношению (F/S) на характеристической кривой на опорной поверхности дороги. Модуль 26 оценки коэффициента трения вычисляет первое расстояние между началом координат, имеющим нулевую тормозную силу F и нулевой коэффициент S скольжения, и первой точкой.
Модуль 26 оценки коэффициента трения дополнительно вычисляет второе расстояние между второй точкой, представляющей тормозную силу F на колесе 2, обозначенную посредством тормозного контроллера 11, и коэффициентом S скольжения и началом координат.
Модуль 26 оценки коэффициента трения вычисляет произведение ((μ1*второе расстояние)/первое расстояние) отношения (второе расстояние/первое расстояние) второго расстояния к первому расстоянию, умноженного на коэффициент μ1 трения опорной поверхности дороги, в качестве коэффициента μ2 трения поверхности дороги в пути движения транспортного средства 1.
[0045] Следует обратиться к фиг. 6 в данном документе. Модуль 26 оценки коэффициента трения выводит оцененный коэффициент μ2 трения в модуль 24 определения времени оценки.
Модуль 24 определения времени оценки определяет время Td оценки, которое постепенно изменяется в ответ на изменение коэффициента μ2 трения, принимаемого из модуля 26 оценки коэффициента трения. Например, модуль 24 определения времени оценки вычисляет время Tb торможения, требуемое транспортному средству 1, имеющему заблокированное колесо 2, для остановки на поверхности дороги, имеющей коэффициент μ2 трения. Другими словами, модуль 24 определения времени оценки вычисляет время Tb торможения, требуемое для остановки, когда максимальная тормозная сила формируется на поверхности дороги, имеющей коэффициент μ2 трения.
[0046] В этом случае, модуль 24 определения времени оценки оценивает скорость V транспортного средства из скорости w вращения колес, определенной непосредственно перед резким становлением нулевой при операции нажатия педали тормоза водителем. Модуль 24 определения времени оценки вычисляет время Tb торможения, требуемое для остановки, из скорости V транспортного средства, когда максимальная тормозная сила формируется на поверхности дороги, имеющей коэффициент μ2 трения. Например, модуль 24 определения времени оценки вычисляет, в качестве времени Tb торможения, значение, полученное посредством деления скорости V транспортного средства на ускорение при торможении согласно коэффициенту μ2 трения. Следовательно, время Tb торможения является пропорциональным коэффициенту μ2 трения.
[0047] Например, при условии, что скорость V транспортного средства непосредственно перед тем, как скорость w вращения колес резко становится нулевой, равна 5 м/с, и коэффициент μ2 трения поверхности дороги равен 0,2, транспортное средство 1 может замедляться приблизительно на 2 м/с2 и в силу этого останавливается самое позднее в течение 5 секунд. С учетом этого, модуль 24 определения времени оценки задает время Td оценки равным вычисленному времени Tb торможения или более в качестве времени, чтобы задерживать период, в который формируется удерживающая тормозная сила, от момента времени, когда скорость вращения колес достигает предварительно определенного значения (например, нуля).
Задание времени Td оценки равным времени Tb торможения или более в силу этого может более надежно предотвращать приложение удерживающей тормозной силы перед фактической остановкой транспортного средства 1.
[0048] Помимо этого, например, модуль 24 определения времени оценки может задавать верхний предел времени Td оценки во время Tb торможения. Поскольку транспортное средство 1 предположительно всегда должно останавливаться в течение времени Tb торможения, задание верхнего предела времени Td оценки равным времени Tb торможения позволяет предотвращать необязательное продление времени Td оценки, которое задерживает формирование удерживающей тормозной силы.
Модуль 24 определения времени оценки может принимать информацию относительно градиента пути движения транспортного средства 1 из модуля 35 оценки градиента и вычислять более точное время Tb торможения в соответствии с градиентом этого пути движения. Тем не менее, второй вариант осуществления не ограничен конфигурацией, которая вычисляет время Tb торможения в соответствии с градиентом пути движения, и модуль 35 оценки градиента может опускаться.
[0049] Работа
Ниже описывается работа контроллера 10 тормозной силы согласно второму варианту осуществления. Следует обратиться к фиг. 8 в данном документе.
На этапе S30, модуль 25 оценки остановки сбрасывает счетчик таймера для подсчета длительности остановки до 0.
Процессы на этапах S31-S33 являются идентичными процессам на этапах S11-S13, описанных со ссылкой на фиг. 5.
[0050] На этапе S34, модуль 26 оценки коэффициента трения оценивает коэффициент μ2 трения пути движения транспортного средства 1.
На этапе S35, модуль 24 определения времени оценки определяет время Td оценки, которое постепенно изменяется в ответ на изменение коэффициента μ2 трения, принимаемого из модуля 26 оценки коэффициента трения. Например, модуль 24 определения времени оценки определяет, в качестве времени Td оценки, время, большее времени, требуемого транспортному средству 1, имеющему заблокированное колесо 2, для остановки на поверхности дороги, имеющей коэффициент μ2 трения. После этого процесс переходит к этапу S36.
Процессы на этапах S36-S39 являются идентичными процессам на этапах S17-S20, описанных со ссылкой на фиг. 5.
[0051] Преимущества второго варианта осуществления
(1) Модуль 26 оценки коэффициента трения оценивает величину трения пути движения транспортного средства 1. Модуль 24 определения времени оценки задает, в качестве времени Td оценки, время, равное или большее времени Tb торможения, требуемого транспортному средству 1, имеющему заблокированное колесо 2, для остановки на поверхности дороги, демонстрирующей трение, имеющее величину, оцененную посредством модуля 26 оценки коэффициента трения.
Задание времени Td оценки равным времени Tb торможения или более может более надежно предотвращать приложение удерживающей тормозной силы перед фактической остановкой транспортного средства 1.
(2) Модуль 24 определения времени оценки задает верхний предел времени Td оценки во время Tb торможения. Поскольку транспортное средство 1 предположительно всегда должно останавливаться в течение времени Tb торможения, задание верхнего предела времени Td оценки равным времени Tb торможения позволяет предотвращать необязательное продление времени Td оценки, которое задерживает формирование удерживающей тормозной силы.
[0052] Третий вариант осуществления
Ниже описывается третий вариант осуществления. Контроллер 10 тормозной силы согласно третьему варианту осуществления монтируется в транспортном средстве 1, включающем в себя мотор, служащий в качестве источника мощности, и ведомое колесо, которое не приводится в действие посредством мотора.
Транспортное средство 1, включающее в себя мотор в качестве источника мощности, может тормозить посредством рекуперативной тормозной силы, сформированной посредством мотора. Ведомое колесо не блокируется, когда транспортное средство 1 тормозит только посредством рекуперативной тормозной силы, сформированной посредством мотора. Следовательно, даже когда транспортное средство 1 тормозит на дороге с низким μ, не определяется то, что это транспортное средство остановлено на скорости V транспортного средства выше относительно области низких скоростей меньше вышеуказанного первого порогового значения Vt1 скорости.
[0053] Контроллер 10 тормозной силы согласно третьему варианту осуществления в силу этого не изменяет период, в который формируется удерживающая тормозная сила, в соответствии с коэффициентом трения поверхности дороги, когда транспортное средство 1 тормозит только посредством рекуперативной тормозной силы, сформированной посредством мотора. Это позволяет предотвращать необязательную задержку формирования удерживающей тормозной силы.
Когда транспортное средство 1 тормозит посредством тормозной силы, включающую в себя фрикционную тормозную силу, сформированную посредством фрикционного тормоза 3, все колеса 2 могут блокироваться. Следовательно, когда транспортное средство 1 тормозит посредством тормозной силы, включающей в себя фрикционную тормозную силу, сформированную посредством фрикционного тормоза 3, контроллер 10 тормозной силы изменяет период, в который формируется удерживающая тормозная сила, в соответствии с коэффициентом трения поверхности дороги. Например, контроллер 10 тормозной силы изменяет период, в который формируется удерживающая тормозная сила, в соответствии с коэффициентом трения поверхности дороги, когда транспортное средство 1 тормозит посредством тормозной силы, включающей в себя фрикционную тормозную силу, при операции нажатия педали 5 тормоза водителем.
[0054] Конфигурация
Следует обратиться к фиг. 9 в данном документе. Ссылки с номерами, идентичные ссылкам с номерами в транспортном средстве 1 (см. фиг. 1), оснащенном контроллером 10 тормозной силы согласно первому варианту осуществления, обозначают идентичные компоненты, составляющие транспортное средство 1, оснащенное контроллером 10 тормозной силы согласно третьему варианту осуществления.
Ссылка с номером 50 обозначает мотор 50, служащий в качестве источника мощности. Мотор 50 приводит в движение правое переднее колесо 2FR и левое переднее колесо 2FL. Правое заднее колесо 2RR и левое заднее колесо 2RL служат в качестве ведомых колес.
Ссылка с номером 51 обозначает коробку передач, которая передает движущую силу мотора 50 на ведущие колеса 2FR и 2FL. Ссылка с номером 52 обозначает педаль акселератора. Ссылка с номером 53 обозначает датчик нажатия педали акселератора, который определяет рабочую величину (рабочую величину надавливания) нажатия педали 52 акселератора водителем.
[0055] Ссылка с номером 54 обозначает контроллер мотора, который управляет движущей силой и рекуперативной тормозной силой, прикладываемой к транспортному средству 1 посредством мотора 50. Контроллер 54 мотора реализуется, например, как электронный модуль управления, включающий в себя CPU и периферийный компонент CPU, такой как ROM и RAM. CPU электронного модуля управления выполняет обработку, которая должна выполняться посредством контроллера 54 мотора и модуля 12 оценки состояния движения, посредством выполнения компьютерной программы, сохраненной на носителе хранения данных.
Ссылка 55 с номером обозначает аккумулятор, который подает электрическую мощность в мотор 50 и накапливает электрическую мощность, рекуперированную посредством мотора 50. Ссылка 56 с номером обозначает инвертор, который выполняет управление преобразованием электрической мощностью аккумулятора 55 и подает эту электрическую мощность в мотор 50 и дополнительно выполняет управление преобразованием рекуперативной мощностью мотора 50 и подает эту мощность в аккумулятор 55.
[0056] Транспортное средство 1 включает в себя "однопедальный режим" и "двухпедальный режим" в качестве режимов для управления тормозной силой и движущей силой.
Однопедальный режим означает режим для управления движущей силой и тормозной силой для транспортного средства 1 главным образом в соответствии с операцией нажатия педали 52 акселератора. В однопедальном режиме, формируется тормозная сила, которая увеличивается с уменьшением в рабочей величине нажатия педали 52 акселератора, когда рабочая величина нажатия педали 52 акселератора равна или меньше предварительно определенного порогового значения рабочей величины. Пороговое значение рабочей величины может задаваться равным рабочей величине (степени открытия), например, приблизительно 25%.
[0057] Удерживающая тормозная сила формируется, когда транспортное средство 1 останавливается в состоянии, в котором тормозная сила прикладывается к транспортному средству 1, и педаль 52 акселератора не нажимается.
Тем не менее, даже в однопедальном режиме, тормозная сила для транспортного средства 1 может управляться в соответствии с операцией нажатия педали 5 тормоза. Удерживающая тормозная сила формируется, когда транспортное средство 1 останавливается в состоянии, в котором тормозная сила прикладывается к транспортному средству 1 в соответствии с операцией нажатия педали 5 тормоза.
Когда рабочая величина нажатия педали 52 акселератора превышает пороговое значение рабочей величины, формируется движущая сила, которая увеличивается с увеличением в количестве операции нажатия педали 52 акселератора.
[0058] Двухпедальный режим означает режим для управления движущей силой транспортного средства 1 в соответствии с операцией нажатия педали 52 акселератора и управления тормозной силой для транспортного средства 1 главным образом в соответствии с операцией нажатия педали 5 тормоза. В двухпедальном режиме, большая движущая сила формируется с увеличенной рабочей величиной нажатия педали 52 акселератора. Большая тормозная сила также формируется с увеличенной рабочей величиной педали 5 тормоза.
Транспортное средство 1 включает в себя переключатель 57 выбора режима для выбора одного из "однопедального режима" и "двухпедального режима" в качестве режимов для управления тормозной силой и движущей силой.
В нижеприведенном описании предполагается, что "однопедальный режим" выбирается посредством переключателя 57 выбора режима.
[0059] Следует обратиться к фиг. 10 в данном документе. Ссылки с номерами, идентичные ссылкам с номерами в тормозном контроллере 11 согласно первому варианту осуществления обозначают идентичные компоненты, составляющие тормозной контроллер 11 согласно третьему варианту осуществления.
Тормозной контроллер 11 включает в себя модуль 46 вычисления второй запрашиваемой тормозной силы, модуль 47 сложения запрашиваемой тормозной силы и модуль 48 рекуперативного совместного управления.
Контроллер 54 мотора включает в себя модуль 60 вычисления запрашиваемой тормозной/движущей силы, модуль 61 распределения, модуль 62 вычисления первой рекуперативной тормозной силы, модуль 63 управления движущей силой и модуль 64 управления рекуперативной тормозной силой.
[0060] Модуль 60 вычисления запрашиваемой тормозной/движущей силы считывает сигнал определения рабочей величины нажатия педали 52 акселератора, выводимый из датчика 53 нажатия педали акселератора, в качестве рабочей величины тормозной/движущей силы, запрашиваемой водителем. Модуль 60 вычисления запрашиваемой тормозной/движущей силы вычисляет запрашиваемую движущую силу, которая должна формироваться в транспортном средстве 1, когда рабочая величина нажатия педали 52 акселератора превышает пороговое значение рабочей величины. Модуль 60 вычисления запрашиваемой тормозной/движущей силы дополнительно вычисляет первую запрашиваемую тормозную силу, которая должна формироваться в транспортном средстве 1, когда рабочая величина нажатия педали 52 акселератора равна или меньше порогового значения рабочей величины. Модуль 60 вычисления запрашиваемой тормозной/движущей силы выводит фрагменты информации относительно вычисленной запрашиваемой движущей силы и первой запрашиваемой тормозной силы в модуль 61 распределения.
[0061] Модуль 61 распределения выводит информацию относительно запрашиваемой движущей силы в модуль 63 управления движущей силой и информацию относительно первой запрашиваемой тормозной силы в модуль 62 вычисления первой рекуперативной тормозной силы.
Модуль 63 управления движущей силой вычисляет значение команды управления током приведения в действие, указывающее ток приведения в действие для мотора 50 в соответствии с запрашиваемой движущей силой. Модуль 63 управления движущей силой выводит значение команды управления током приведения в действие в инвертор 56.
Модуль 62 вычисления первой рекуперативной тормозной силы вычисляет первую рекуперативную тормозную силу, которая должна формироваться в моторе 50 в соответствии с первой запрашиваемой тормозной силой. Модуль 62 вычисления первой рекуперативной тормозной силы выводит первую рекуперативную тормозную силу в модуль 47 сложения запрашиваемой тормозной силы.
[0062] Модуль 46 вычисления второй запрашиваемой тормозной силы считывает сигнал определения рабочей величины нажатия педали 5 тормоза, выводимый из датчика 6 нажатия педали тормоза. Модуль 46 вычисления второй запрашиваемой тормозной силы вычисляет вторую запрашиваемую тормозную силу в соответствии с рабочей величиной нажатия педали 5 тормоза. Вторая запрашиваемая тормозная сила включает в себя, по меньшей мере, одно из фрикционной тормозной силы, сформированной посредством фрикционного тормоза 3, и рекуперативной тормозной силы, сформированной посредством мотора 50.
Модуль 46 вычисления второй запрашиваемой тормозной силы выводит информацию относительно второй запрашиваемой тормозной силы в модуль 47 сложения запрашиваемой тормозной силы.
[0063] Модуль 47 сложения запрашиваемой тормозной силы вычисляет суммированную тормозную силу посредством суммирования первой рекуперативной тормозной силы и второй запрашиваемой тормозной силы. Модуль 47 сложения запрашиваемой тормозной силы выводит суммированную тормозную силу в модуль 43 вычисления фрикционной тормозной силы. Модуль 47 сложения запрашиваемой тормозной силы дополнительно выводит фрагменты информации относительно первой рекуперативной тормозной силы и второй рекуперативной тормозной силы в модуль 48 рекуперативного совместного управления.
Модуль 48 рекуперативного совместного управления выбирает большую из первой рекуперативной тормозной силы и второй рекуперативной тормозной силы в качестве запрашиваемой рекуперативной тормозной силы и выводит информацию относительно запрашиваемой рекуперативной тормозной силы в модуль 64 управления рекуперативной тормозной силой. Модуль 48 рекуперативного совместного управления дополнительно выводит информацию относительно запрашиваемой рекуперативной тормозной силы в модуль 24 определения времени оценки модуля 12 оценки состояния движения.
[0064] Модуль 64 управления рекуперативной тормозной силой вычисляет величину рекуперации согласно запрашиваемой рекуперативной тормозной силе. Величина рекуперации представляет собой рекуперативную тормозную силу, которая должна формироваться в моторе 50. Модуль 64 управления рекуперативной тормозной силой вычисляет значение команды управления током для формирования в моторе 50 рекуперативного крутящего момента согласно вычисленной величине рекуперации. Модуль 64 управления рекуперативной тормозной силой выводит информацию относительно вычисленного значения команды управления током в инвертор 56, который формирует рекуперативный крутящий момент в моторе 50, на основе этого значения команды управления током.
Модуль 64 управления рекуперативной тормозной силой дополнительно выводит информацию относительно вычисленного значения команды управления током в модуль 43 вычисления фрикционной тормозной силы.
[0065] Модуль 43 вычисления фрикционной тормозной силы вычисляет фрикционную тормозную силу, которая должна фактически формироваться посредством фрикционного тормоза 3, посредством вычитания величины рекуперации, вычисленной посредством модуля 64 управления рекуперативной тормозной силой, из суммированной тормозной силы, вычисленной посредством модуля 47 сложения запрашиваемой тормозной силы. Модуль 43 вычисления фрикционной тормозной силы выводит информацию относительно вычисленной фрикционной тормозной силы в модуль 44 гидравлического управления и модуль 24 определения времени оценки модуля 12 оценки состояния движения.
Модуль 44 гидравлического управления формирует фрикционную тормозную силу на колесе 2 посредством управления гидравлическим давлением фрикционного тормоза 3 в соответствии с тормозной силой, вычисленной посредством модуля 43 вычисления фрикционной тормозной силы.
[0066] Модуль 24 определения времени оценки модуля 12 оценки состояния движения принимает значение команды управления током для формирования рекуперативного крутящего момента в моторе 50 из модуля 64 управления рекуперативной тормозной силой. Модуль 24 определения времени оценки дополнительно принимает информацию относительно фрикционной тормозной силы из модуля 43 вычисления фрикционной тормозной силы.
Модуль 24 определения времени оценки определяет то, тормозит или нет транспортное средство 1 только посредством рекуперативной тормозной силы мотора 50, на основе значения команды управления током и фрикционной тормозной силы.
[0067] Когда транспортное средство 1 тормозит только посредством рекуперативной тормозной силы, модуль 24 определения времени оценки не изменяет период, в который формируется удерживающая тормозная сила, в соответствии с коэффициентом трения поверхности дороги. Например, модуль 24 определения времени оценки не задерживает период, в который формируется удерживающая тормозная сила, в соответствии с результатом определения того, находится или нет путь движения транспортного средства 1 на дороге с низким μ. Например, модуль 24 определения времени оценки не задерживает период, в который формируется удерживающая тормозная сила, даже когда модуль 22 обнаружения дороги с низким μ определяет то, что путь движения транспортного средства 1 находится на дороге с низким μ. Например, модуль 24 определения времени оценки не изменяет время Td оценки относительно предварительно определенного значения T0, когда транспортное средство 1 тормозит только посредством рекуперативной тормозной силы.
[0068] Когда транспортное средство 1 тормозит посредством тормозной силы, включающей в себя фрикционную тормозную силу, например, когда транспортное средство 1 тормозит посредством тормозной силы, включающей в себя фрикционную тормозную силу, сформированную при операции нажатия педали 5 тормоза водителем, модуль 24 определения времени оценки изменяет период, в который формируется удерживающая тормозная сила, в соответствии с коэффициентом трения поверхности дороги. Например, модуль 24 определения времени оценки изменяет время Td оценки в соответствии с коэффициентом трения поверхности дороги. Период, в который формируется удерживающая тормозная сила, определяется посредством модуля 24 определения времени оценки с использованием способа, идентичного способу, описанному в первом варианте осуществления.
В третьем варианте осуществления, аналогично второму варианту осуществления, коэффициент трения поверхности дороги в пути движения транспортного средства 1 может оцениваться, и задержка периода, в который формируется удерживающая тормозная сила, может постепенно изменяться в соответствии с изменением значения коэффициента трения.
[0069] Работа
Далее описывается работа контроллера 10 тормозной силы согласно третьему варианту осуществления. Следует обратиться к фиг. 11 в данном документе.
Процессы на этапах S40-S42 являются идентичными процессам на этапах S10-S12, описанных со ссылкой на фиг. 5.
На этапе S43, модуль 24 определения времени оценки определяет то, тормозит или нет транспортное средство 1 только посредством рекуперативной тормозной силы мотора 50. Если транспортное средство 1 тормозит только посредством рекуперативной тормозной силы (этап S43:Y), процесс пропускает этапы S44-S47 и переходит к этапу S48. Другими словами, модуль 24 определения времени оценки не выполняет этап S47, на котором изменяется время Td оценки.
[0070] Если транспортное средство 1 тормозит посредством тормозной силы, включающей в себя фрикционную тормозную силу (этап S43:N), процесс переходит к этапу S44. Как результат, модуль 24 определения времени оценки изменяет время Td оценки в соответствии с коэффициентом трения поверхности дороги на этапах S44-S47. После этого процесс переходит к этапу S48.
Процессы на этапах S48-S51 являются идентичными процессам на этапах S17-S20, описанных со ссылкой на фиг. 5.
[0071] Преимущества третьего варианта осуществления
Транспортное средство 1 включает в себя мотор 50, служащий в качестве источника мощности, ведущие колеса 2FR и 2FL и ведомые колеса 2RR и 2RL. Модуль 24 определения времени оценки определяет то, тормозит или нет транспортное средство 1 только посредством рекуперативной тормозной силы, сформированной посредством мотора 50 рекуперативной тормозной силы, и фрикционной тормозной силы, сформированной посредством фрикционного тормоза 3. Когда определяется то, что транспортное средство 1 тормозит только посредством рекуперативной тормозной силы, модуль 24 определения времени оценки не изменяет период, в который формируется удерживающая тормозная сила, в соответствии с коэффициентом трения поверхности дороги. Следовательно, модуль 42 управления поддержанием остановки прикладывает тормозную силу к транспортному средству 1, независимо от того, нажимается или нет педаль тормоза, после истечения времени Td оценки, заданного независимо от величины трения поверхности дороги.
Когда определяется то, что транспортное средство 1 тормозит посредством тормозной силы, включающей в себя фрикционную тормозную силу, сформированную при операции нажатия педали 5 тормоза водителем, модуль 24 определения времени оценки задает время Td оценки большим тогда, когда трение поверхности дороги является низким, чем тогда, когда трение поверхности дороги является высоким.
Ведомые колеса 2RR и 2RL не блокируются, когда транспортное средство 1 тормозит только посредством рекуперативной тормозной силы. Это означает то, что не определяется то, что транспортное средство остановлено до того, как скорость V транспортного средства снизится в достаточной степени даже на дороге с низким μ. Следовательно, не изменение периода, в который формируется удерживающая тормозная сила, в соответствии с коэффициентом трения поверхности дороги, когда транспортное средство 1 тормозит только посредством рекуперативной тормозной силы, позволяет предотвращать необязательную задержку формирования удерживающей тормозной силы.
[0072] Все примеры и условный язык, предоставленные в данном документе, служат в педагогических целях для помощи читателю в понимании изобретения и принципов, вносимых автором изобретения в область техники, и не должны истолковываться в качестве ограничений на такие конкретно изложенные примеры и условия, и также организация таких примеров в описании изобретения не связана с демонстрацией преимуществ и недостатков изобретения. Хотя выше подробно описаны один или более вариантов осуществления настоящего изобретения, следует понимать, что различные изменения, замены и модификации могут вноситься в них без отступления от сущности и объема изобретения.
Список номеров ссылок
[0073] 1 - транспортное средство
2 - колесо
2FL - левое переднее колесо
2FR - правое переднее колесо
2RL - левое заднее колесо
2RR - правое заднее колесо
3FL, 3FR, 3RL, 3RR - фрикционный тормоз
4FL, 4FR, 4RL, 4RR - датчик скорости вращения колес
5 - педаль тормоза
6 - датчик нажатия педали тормоза
7 - датчик ускорения
10 - контроллер тормозной силы
11 - тормозной контроллер
12 - модуль оценки состояния движения
20 - модуль вычисления скорости транспортного средства
21 - модуль вычисления коэффициента скольжения
22 - модуль обнаружения дороги с низким μ
23 - модуль определения точности оценки
24 - модуль определения времени оценки
25 - модуль оценки остановки
26 - модуль оценки коэффициента трения
35 - модуль оценки градиента
40 - модуль вычисления запрашиваемой тормозной силы
41 - модуль оценки условий поддержания
42 - модуль управления поддержанием остановки
43 - модуль вычисления фрикционной тормозной силы
44 - модуль гидравлического управления
45 - модуль ABS-управления
46 - модуль вычисления второй запрашиваемой тормозной силы
47 - модуль сложения запрашиваемой тормозной силы
48 - модуль рекуперативного совместного управления
50 - мотор
52 - педаль акселератора
53 - датчик нажатия педали акселератора
54 - контроллер мотора
55 - аккумулятор
56 - инвертор
57 - переключатель выбора режима
60 - модуль вычисления запрашиваемой тормозной/движущей силы
61 - модуль распределения
62 - модуль вычисления первой рекуперативной тормозной силы
63 - модуль управления движущей силой
64 - модуль управления рекуперативной тормозной силой
Способ управления тормозной силой определяет скорость (w) вращения колес транспортного средства (1), формирует удерживающую тормозную силу для поддержания остановленного состояния транспортного средства (1) независимо от того, нажимается или нет тормоз (3) водителем транспортного средства (1), когда определяется то, что транспортное средство (1) остановлено, на основе скорости (w) вращения колес, определенной в состоянии, в котором тормозная сила прикладывается к транспортному средству (1), и задерживает период, в который формируется удерживающая тормозная сила, в соответствии с коэффициентом трения поверхности дороги в пути движения транспортного средства (1). Способ предотвращает поддержание тормозной силы для поддержания остановленного состояния транспортного средства до того, как оно замедлится в достаточной степени на поверхности дороги с низким коэффициентом трения. 2 н. и 6 з.п. ф-лы, 11 ил.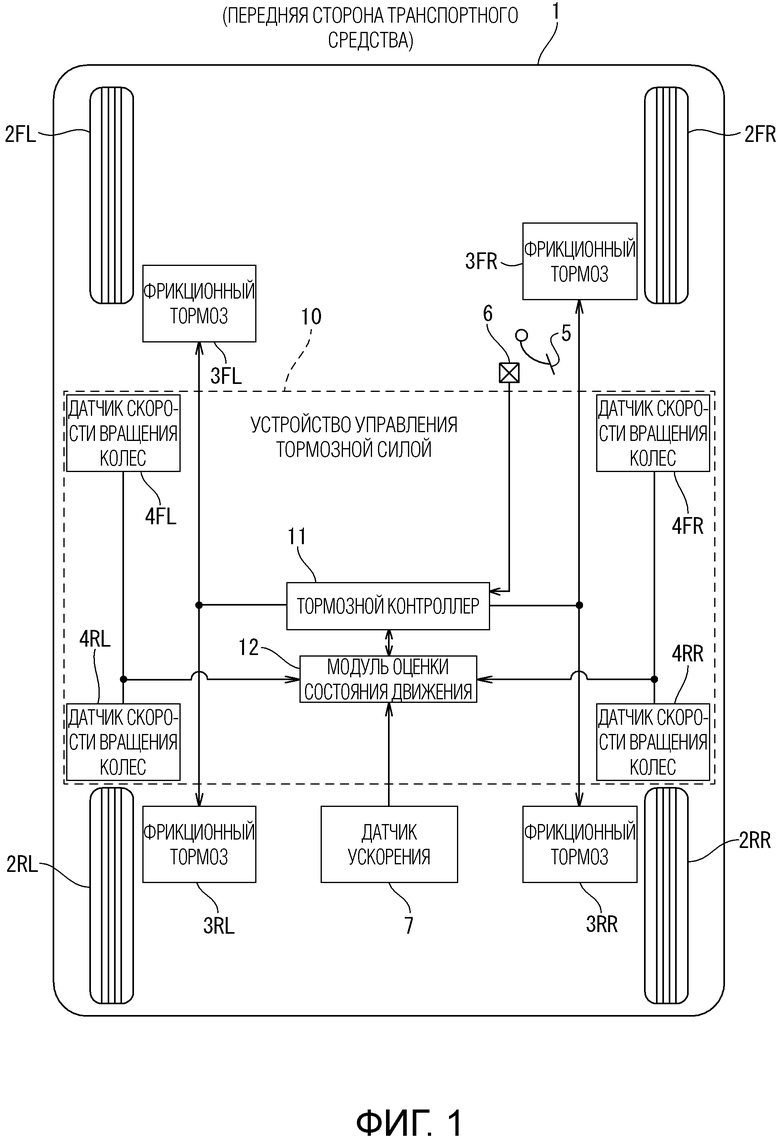
1. Способ управления тормозной силой, содержащий этапы, на которых:
- определяют скорость вращения колес транспортного средства посредством датчика скорости вращения колес;
- прикладывают тормозную силу к транспортному средству при операции нажатия педали тормоза водителем;
- определяют то, остановлено или нет транспортное средство, на основе скорости вращения колес;
- прикладывают тормозную силу к транспортному средству, независимо от того, нажимается или нет педаль тормоза, после истечения предварительно определенного времени после определения того, что транспортное средство остановлено; и
- задают предварительно определенное время большим тогда, когда трение поверхности дороги, по которой движется транспортное средство, является низким, чем тогда, когда трение поверхности дороги является высоким.
2. Способ управления тормозной силой по п. 1, в котором предварительно определенное время представляет собой время оценки, используемое для того, чтобы определять то, остановлено или нет транспортное средство, на основе скорости вращения колес.
3. Способ управления тормозной силой по п. 1 или 2, дополнительно содержащий этапы, на которых:
- определяют то, ниже или нет трение поверхности дороги, чем первое предварительно определенное пороговое значение;
- определяют то, выше или нет точность оценки трения поверхности дороги, чем второе предварительно определенное пороговое значение; и
- задают предварительно определенное время большим тогда, когда трение поверхности дороги ниже, чем первое предварительно определенное пороговое значение, и точность выше, чем второе предварительно определенное пороговое значение, чем тогда, когда трение поверхности дороги ниже, чем первое предварительно определенное пороговое значение, и точность не превышает второе предварительно определенное пороговое значение.
4. Способ управления тормозной силой по п. 3, дополнительно содержащий этапы, на которых:
- вычисляют скорость транспортного средства на основе скорости вращения колес и
- определяют то, что точность является более высокой, когда суммарное время, в которое многократно определено то, что трение поверхности дороги ниже, чем первое предварительно определенное пороговое значение, в период, в который скорость транспортного средства ниже предварительно определенного значения, является большим, чем тогда, когда суммарное время является небольшим.
5. Способ управления тормозной силой по п. 1 или 2, дополнительно содержащий этапы, на которых:
- оценивают величину трения поверхности дороги и
- задают, в качестве предварительно определенного времени, время не меньше времени торможения, требуемого транспортному средству, имеющему заблокированное колесо, для остановки на поверхности дороги, демонстрирующей трение, имеющее оцененную величину.
6. Способ управления тормозной силой по п. 5, в котором время торможения составляет верхний предел предварительно определенного времени.
7. Способ управления тормозной силой по п. 1 или 2, дополнительно содержащий этапы, на которых:
- определяют то, тормозит или нет транспортное средство, содержащее ведущее колесо, приводимое в действие посредством мотора, и ведомое колесо, которое не приводится в действие посредством мотора, только посредством рекуперативной тормозной силы из рекуперативной тормозной силы, сформированной посредством мотора, и фрикционной тормозной силы, сформированной при операции нажатия педали тормоза;
- когда определяется то, что транспортное средство тормозит только посредством рекуперативной тормозной силы, прикладывают тормозную силу к транспортному средству, независимо от того, нажимается или нет педаль тормоза, после предварительно определенного времени, заданного независимо от величины трения поверхности дороги; и
- когда определяется то, что транспортное средство тормозит посредством тормозной силы, включающей в себя фрикционную тормозную силу, сформированную при операции нажатия педали тормоза водителем, задают предварительно определенное время большим тогда, когда трение поверхности дороги является низким, чем тогда, когда трение поверхности дороги является высоким.
8. Устройство управления тормозной силой, содержащее:
- датчик скорости вращения колес, выполненный с возможностью определять скорость вращения колес транспортного средства; и
- контроллер, выполненный с возможностью прикладывать тормозную силу к транспортному средству при операции нажатия педали тормоза, которая должна нажиматься водителем, прикладывать тормозную силу к транспортному средству, независимо от того, нажимается или нет педаль тормоза, после истечения предварительно определенного времени после того, как определяется то, что транспортное средство остановлено, на основе скорости вращения колес, и задавать предварительно определенное время большим тогда, когда трение поверхности дороги, по которой движется транспортное средство, является низким, чем тогда, когда трение поверхности дороги является высоким.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2086441C1 |
| JP 2006327369 A, 07.12.2006 | |||
| JP2015193278 A, 05.11.2015. | |||

