Изобретение относится к радиолокации и может быть использовано в качестве устройства корреляционной обработки сигналов в составе корреляционно-фазового пеленгатора.
Известны устройства корреляционной обработки сигналов, такие как А.С. СССР 1155970, патент РФ 2624409, Винокуров В.И., Ваккер Р.А. Вопросы обработки сложных сигналов в корреляционных системах. - М.: Сов. радио, 1972., Радиотехнические тетради, №55, 2015 г., стр. 38.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство корреляционной обработки сигналов (Радиотехнические тетради, №55, 2015 г., стр. 38), которое и выбрано в качестве прототипа.
Известное устройство содержит первый и второй смесители, входы которых являются первым и вторым входами устройства, последовательно соединенные с ними первый и второй полосовые фильтры, выходы которых соединены с первым и вторым входами перемножителя соответственно, выход которого через узкополосный фильтр соединен с первым входом фазометра, выход которого является выходом устройства, вилочный гетеродин, первый и второй выход которого соединен со вторыми входами смесителей соответственно, на второй вход фазометра подается разностная частота вилочного гетеродина. Недостатком прототипа является то, что при обработке сигналов с динамично изменяющейся разностью фаз, за счет разностно-допплеровского смещения частоты сигнала на выходе перемножителя, необходимо расширять полосу пропускания узкополосного фильтра. Расширение полосы пропускания узкополосного фильтра приводит к увеличению шумовой ошибки измерения разности фаз.
Признаки настоящего изобретения, совпадающие с признаками прототипа:
включение в структуру устройства двух смесителей, двух полосовых фильтров, перемножителя, узкополосного фильтра и вилочного гетеродина.
Патентуемое изобретение - узкополосное устройство корреляционной обработки сигналов решает задачу повышения точности измерения разности фаз обрабатываемых сигналов от динамичных источников излучения.
Технический результат - патентуемое изобретение обеспечивает создание приемников корреляционно-фазовых пеленгаторов с высокоточным измерением разности фаз обрабатываемых сигналов от динамичных источников излучения.
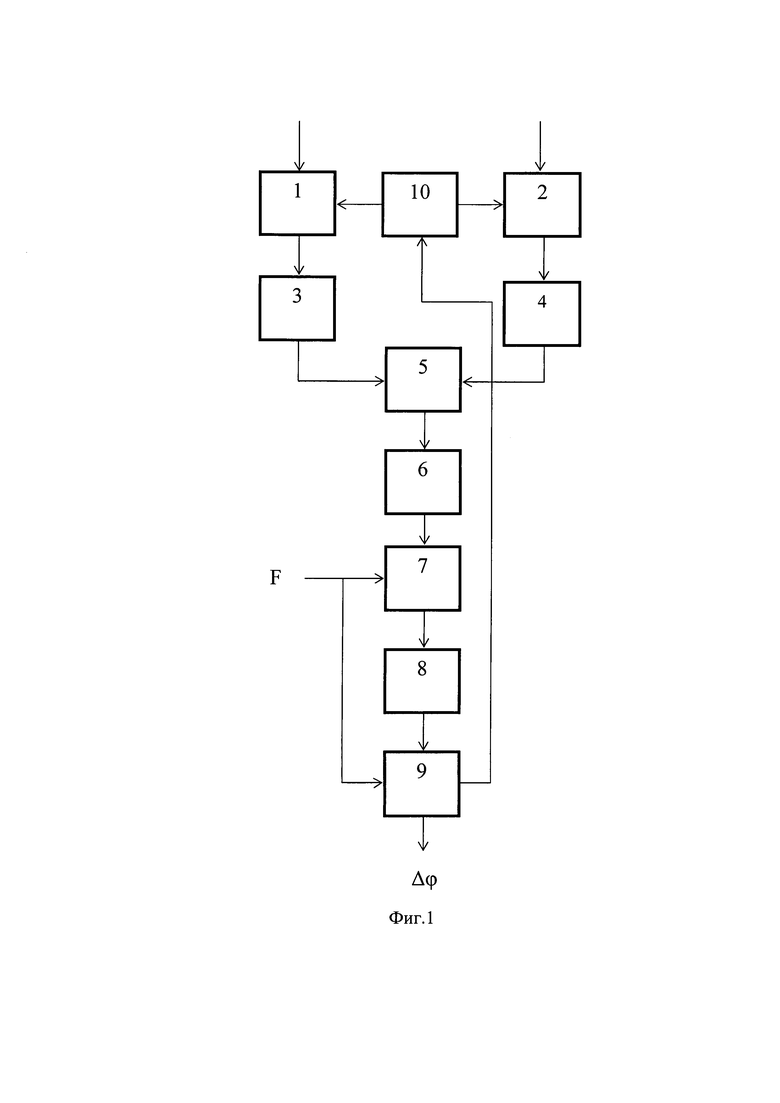
Сущность изобретения поясняется графическим материалом. На фиг. 1 показана структурная схема узкополосного устройства корреляционной обработки сигналов.
Узкополосное устройство корреляционной обработки сигналов содержит первый и второй смесители 1 и 2, входы которых являются первым и вторым входами устройства соответственно, последовательно соединенные с ними первый и второй полосовые фильтры 3 и 4, выходы которых соединены с первым и вторым входами перемножителя 5 соответственно, выход которого через узкополосный фильтр 6 соединен с первым входом фазового детектора 7, последовательно соединенный с ним блок фазовой автоподстройки частоты 8, выход которого соединен с управляющим входом фазовращателя 9, вилочный гетеродин 10, первый и второй выходы которого соединены со вторыми входами смесителей 1 и 2 соответственно, вход разностной частоты вилочного гетеродина 10 соединен с выходом фазовращателя 9, опорная частота подается на второй вход фазового детектора 7 и на вход фазовращателя 9, выходом устройства является информационный выход фазовращателя 9.
Структура предлагаемого устройства отличается от прототипа наличием фазового детектора 7, блока фазовой автоподстройки частоты 8 и фазовращателя 9.
Устройство работает следующим образом.
На входы устройства поступают сигналы, отличающиеся разностью фаз. Рассмотрим работу устройства с гармоническими сигналами, а именно
u1=cos(2πƒct+ϕ1) и u2=cos(2πƒct+ϕ2)
где ƒc - частота сигнала, ϕ1 и ϕ2 - фазы сигналов.
Здесь и далее, для упрощения, будем считать амплитуды сигналов единичными, т.к. их уровень не влияет на принцип работы устройства.
После преобразования в смесителях 1 и 2 с помощью вилочного гетеродина 10, частоты которого имеют заданный разнос ƒг-F и ƒг, и фильтрации полосовыми фильтрами 3 и 4, сигналы принимают вид
u3=cos[2π(ƒпр+F)t+ϕ1] и u4=cos(2πƒпрt+ϕ2), где ƒпр=ƒс-ƒг.
Заданный разнос частот вилочного гетеродина 10 формируется путем подачи на его вход опорного гармонического сигнала uо=cos2πFt.
После перемножения выходных сигналов полосовых фильтров 3 и 4 с помощью перемножителя 5 получаем гармонический сигнал, частота которого соответствует частоте разноса вилочного гетеродина, а фаза - разности фаз входных сигналов
u5=cos(2πFt+Δϕ), где Δϕ=ϕ1-ϕ2.
При работе с сигналами динамичных источников излучения разность фаз этих сигналов изменяется во времени. Это эквивалентно изменению частоты сигнала на выходе перемножителя, Δϕ(t)=2πFd. При этом выходной сигнал перемножителя принимает вид
u5=cos2π(F+Fd)t.
Резонансная частота узкополосного фильтра 6 соответствует частоте разноса вилочного гетеродина 10 и равна F. Полоса пропускания узкополосного фильтра 6 должна выбираться исходя из ожидаемой динамики источника излучения, т.е. с учетом Fd. Высокая динамика источника излучения приводит к необходимости значительно расширять полосу пропускания узкополосного фильтра 6, что увеличивает шумовую ошибку измерения разности фаз обрабатываемых сигналов.
Для устранения этого недостатка в предлагаемом изобретении частота разноса вилочного гетеродина подается на вилочный гетеродин 10 не прямо, а через фазовращатель 9. Функциональное назначение фазовращателя 9 - подстроить фазу опорного сигнала вилочного гетеродина uо под фазу выходного сигнала перемножителя 5. Для этого используется фазовый детектор 7. Выходной сигнал фазового детектора 7 через блок фазовой автоподстройки частоты 8 поступает на управляющий вход фазовращателя 9. Автоматическая подстройка частоты опорного сигнала вилочного гетеродина обеспечивает компенсацию с помощью фазовращателя 9 фазового набега сигнала на выходе перемножителя 5, в результате чего опорный сигнал вилочного гетеродина принимает вид uо=cos2π(F-Fdk)t, где Fdk - компенсирующий сдвиг частоты опорного сигнала.
После изменения частоты опорного сигнал вилочного гетеродина выходной сигнал перемножителя принимает вид u5=cos2π(F-Fdk+Fd)t. Работа фазовой автоподстройки частоты обеспечивает следующее соотношение Fdk=Fd, при этом частота выходного сигнала перемножителя соответствует резонансной частоте узкополосного фильтра 6. Это позволяет значительно сузить полосу пропускания узкополосного фильтра и повысить точность измерения разности фаз обрабатываемых сигналов. Введенный фазовращателем 9 компенсирующий фазовый сдвиг равен разности фаз обрабатываемых сигналов. Данная информация поступает с информационного выхода фазовращателя 9, который является выходом узкополосного устройства корреляционной обработки сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Приемник шумоподобных фазоманипулированных сигналов | 1981 |
|
SU1021014A2 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2412835C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2435171C1 |
| Панорамный приемник | 1990 |
|
SU1742741A2 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518428C2 |
| ПАНОРАМНЫЙ ПРИЕМНИК | 1991 |
|
RU2010244C1 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО | 1991 |
|
RU2005994C1 |
| РАДИОПРИЕМНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ШИРОКОПОЛОСНЫХ СИГНАЛОВ С ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2014 |
|
RU2546312C1 |
| Индикаторное устройство | 1991 |
|
SU1809307A1 |
| ПЕЛЕНГАТОР | 2001 |
|
RU2190235C1 |
Изобретение относится к радиолокации и может быть использовано в качестве устройства корреляционной обработки сигналов в составе корреляционно-фазового пеленгатора. Достигаемый технический результат изобретения - повышение точности измерения разности фаз обрабатываемых сигналов от динамичных источников излучения. Технический результат достигается за счет использования управляемого фазовращателя и фазовой автоподстройки частоты вилочного гетеродина, при этом фазовая автоподстройка частоты вилочного гетеродина позволяет компенсировать фазовые набеги обрабатываемых сигналов на входе перемножителя, за счет чего частота сигнала на выходе перемножителя соответствует резонансной частоте узкополосного фильтра, что дает возможность уменьшать полосу пропускания этого фильтра. Сужение полосы пропускания узкополосного фильтра уменьшает шумовую ошибку измерения разности фаз обрабатываемых сигналов. 1 ил.
Узкополосное устройство корреляционной обработки сигналов, содержащее первый и второй смесители, входы которых являются первым и вторым входами устройства соответственно, последовательно соединенные с ними первый и второй полосовые фильтры, выходы которых соединены с первым и вторым входами перемножителя соответственно, выход которого соединен с входом узкополосного фильтра, и вилочный гетеродин, первый и второй выходы которого соединены со вторыми входами смесителей соответственно, отличающееся тем, что введены последовательно соединенные фазовый детектор и блок фазовой автоподстройки частоты, причем первый вход фазового детектора соединен с выходом узкополосного фильтра, и фазовращатель, причем выход блока фазовой автоподстройки частоты соединен с управляющим входом фазовращателя, выход которого соединен с входом разностной частоты вилочного гетеродина, опорная частота подается на второй вход фазового детектора и на вход фазовращателя, информационный выход фазовращателя является выходом устройства.
| КОРРЕЛЯЦИОННО-ФАЗОВЫЙ ПЕЛЕНГАТОР | 2011 |
|
RU2474835C1 |
| Фазовый пеленгатор | 2018 |
|
RU2684321C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР СКАНИРУЮЩИХ ИСТОЧНИКОВ | 1993 |
|
RU2073878C1 |
| Фазовый пеленгатор | 2016 |
|
RU2618522C1 |
| WO 2000019230 A1, 06.07.2000 | |||
| US 6184830 B1, 06.02.2001 | |||
| JP 2017142121 A,17.08.2017. | |||

