Изобретение относится к электротехнике, а именно к синхронным электродвигателям с реактивным ротором, и может быть применено в электромеханических системах с большими скоростями вращения, например, в компрессоростроении.
Известен синхронный электродвигатель, имеющий шихтованный магнитопровод статора с многофазной обмоткой и реактивный ферромагнитный ротор. Обмотка статора получает питание от инвертора частоты, вырабатывающего систему напряжений согласно требуемой скорости вращения (Г.Б. Онищенко «Электрический привод: учебник для студ. высш. учеб. заведений». 2-е изд., стер. – М.: Издательский центр «Академия», 2008. - 288 с.) - [1].
Его недостатком является сложность схемы питания.
Известен синхронный электродвигатель, имеющий П-образные магнитопроводы статора с сосредоточенной многофазной обмоткой и реактивный ферромагнитный ротор с явно выраженными полюсами (патент №2159494, H02K 19/06, H02K 1/06, опубл. 20.11.2000) - [2].
Его недостатком является низкая скорость вращения. Например, при частоте питания 50 Гц, трех П-образных магнитопроводах статора и двух полюсах на роторе скорость вращения ротора составляет 1500 об/мин.
Наиболее близким к заявляемому техническому решению по конструкции и достигаемому эффекту является синхронный электродвигатель, имеющий П-образные шихтованные магнитопроводы статора с многофазной сосредоточенной обмоткой, фазы обмотки питаются переменными напряжениями, сдвинутыми по фазе на угол, меньший пространственного сдвига П-образных магнитопроводов, а ротор содержит два зубца, смещенных по оси и имеющих одинаковое угловое положение (патент №2499344, H02K 19/06, H02K 1/06, опубл. 20.11.2013) - [3].
Его недостатком является сложность конструкции и большой момент инерции ротора.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в упрощении конструкции и снижение момента инерции ротора.
Технический результат достигается тем, что синхронный электродвигатель, имеющий шихтованные магнитопроводы статора с многофазной сосредоточенной обмоткой, фазы которой питаются напряжениями, сдвинутыми по фазе на угол, меньший пространственного сдвига магнитопроводов, и ферромагнитный ротор, магнитопроводы статора имеют С-образную форму с плоскими рабочими зазорами, а цилиндрический ротор смещен относительно оси вращения.
Сущность технического решения поясняется фиг. 1-9, где
Фиг. 1 - поперечное сечение электродвигателя;
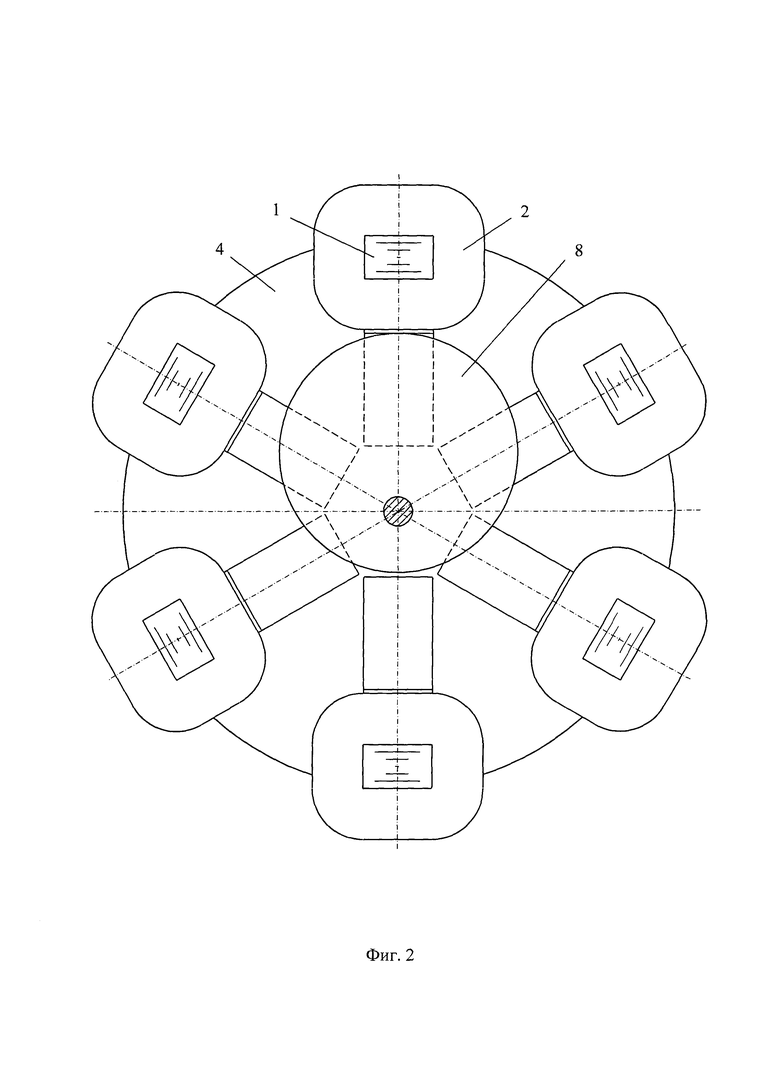
Фиг. 2 - продольное сечение электродвигателя;
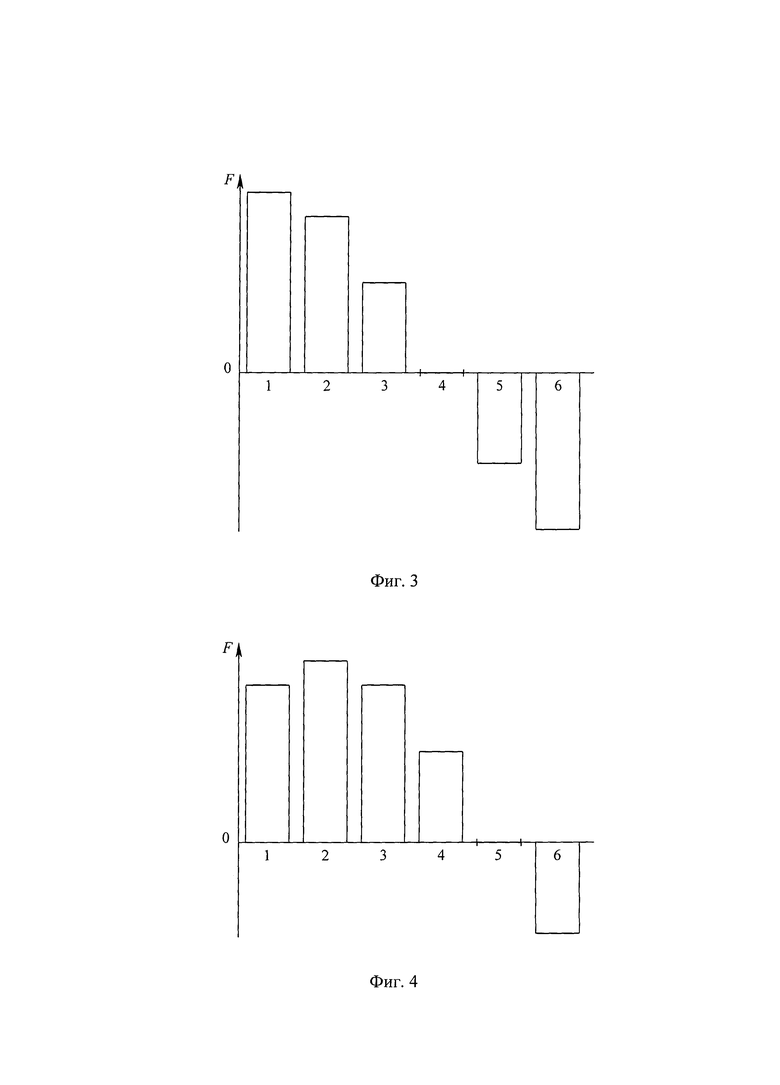
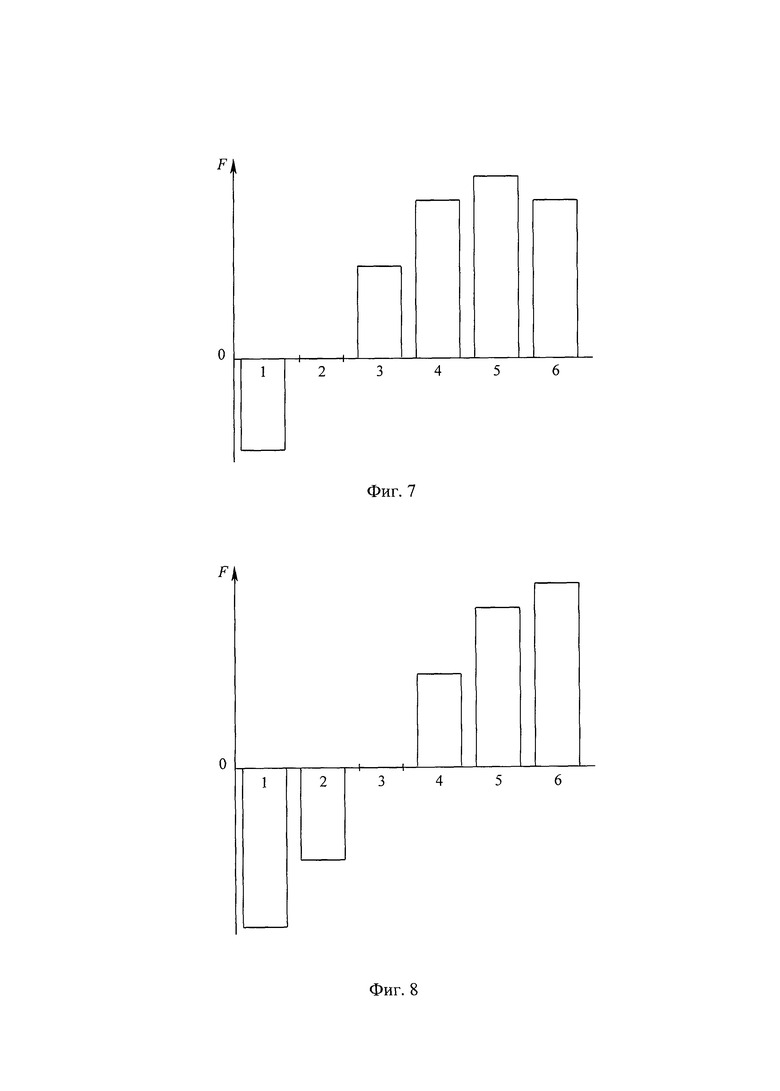
Фиг. 3 - фиг. 8 - графики магнитодвижущей силы (МДС) в рабочем зазоре в различные моменты времени, соответствующие изменению фаз напряжений питания на угол π/6;
Фиг. 9 - векторная диаграмма фазных напряжений 6-фазного синхронного электродвигателя при питании от трехфазной сети.
На фиг. 1-2 обозначено:
1 - С-образный магнитопровод статора;
2 - обмотка статора;
3, 4 - подшипниковые щиты;
5,6 - подшипники;
7 - вал;
8 - ротор.
С-образные магнитопроводы 1 статора выполнены шихтованными из электротехнической стали и объединены в единую конструкцию с помощью подшипниковых щитов 3, 4, выполненных из немагнитного материала. На каждом С-образном магнитопроводе 1 имеется фаза 2 обмотки статора. Ротор 8 выполнен из ферромагнитного материала. Он имеет форму цилиндра, смещенного относительно оси вала 7, опирающегося на подшипники 5, 6.
Синхронный электродвигатель работает следующим образом.
На шесть фаз обмотки статора подаются переменные напряжения, сдвинутые по фазе на угол π/6. В рабочих воздушных зазорах возникает волна магнитной индукции, соответствующая углу π. За время, соответствующее половине периода синусоидального напряжения, волна магнитной индукции поворачивается на угол 2π.
Магнитная проводимость рабочего воздушного зазора для одного магнитопровода определяется формулой

где μ0 - магнитная постоянная; S - площадь между магнитопроводом и ротором; δ - зазор между ними. Ротор стремится занять положение, при котором максимальная магнитная проводимость и максимум площади перекрытия соответствуют максимуму МДС и магнитной индукции.
На фиг. 3-8 показано распределение МДС по магнитопроводам для шести моментов времени:
0, T/12, 2T/12, 3T/12, 4T/12, 5T/12.
Видно, что за половину периода Т/2 напряжений питания максимум МДС поворачивается на один оборот, т.е. на угол 2π. За период Т ротор делает два оборота, т.е. угловая скорость ротора - 2ω.
Например, при частоте питания 50 Гц скорость вращения ротора составит 6000 об/мин.
На фиг. 9 показана векторная диаграмма фазных напряжений в случае, когда 1-я, 3-я и 5-я фазы обмотки статора питаются фазными напряжениями, а 2-я, 4-я и 6-я фазы питаются линейными напряжениями при соединении обмотки генератора в звезду с нейтральным проводом. Отметим, что в этом случае число витков четных фаз должно быть в  раз больше, чем число витков нечетных фаз.
раз больше, чем число витков нечетных фаз.
Для статической балансировки ротора центр его масс должен быть на оси вращения, для чего может быть применен балансный элемент - груз (на фиг. 1 - 2 не показан).
Отметим, что С-образные магнитопроводы 1 статора могут выполняться витыми. Каждый С-образный элемент вместе со своей фазой может собираться и транспортироваться отдельно, и лишь на месте эксплуатации все С-образные магнитопроводы 1 с фазами 2 обмотки статора объединяются в единую конструкцию с помощью подшипниковых щитов 3, 4, что важно при больших мощностях электродвигателей.
Таким образом, благодаря тому, что магнитопровод статора выполнен в виде С-образных элементов с фазами обмотки, а цилиндрический ротор смещен относительно оси, получен синхронный электродвигатель с простой конструкцией и малым моментом инерции ротора с повышенной скоростью вращения при питании от трехфазной сети.
| название | год | авторы | номер документа |
|---|---|---|---|
| Синхронный электродвигатель | 2021 |
|
RU2757459C1 |
| Синхронный электродвигатель | 2021 |
|
RU2757423C1 |
| Синхронный электродвигатель | 2021 |
|
RU2761085C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2012 |
|
RU2499344C1 |
| БЕСКОНТАКТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437201C1 |
| МОДУЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414791C1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2401499C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2013 |
|
RU2544836C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ БЕСКОНТАКТНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437202C1 |



Изобретение относится к электротехнике, а именно к синхронным электродвигателям с реактивным ротором. Технический результат, достигаемый при использовании настоящего изобретения, заключается в упрощении конструкции и уменьшении момента инерции ротора с повышенной скоростью вращения при питании от трехфазной сети. В предлагаемом синхронном электродвигателе С-образные магнитопроводы 1 статора выполнены шихтованными из электротехнической стали, имеют плоские рабочие зазоры и объединены в единую конструкцию с помощью подшипниковых щитов 3, 4, выполненных из немагнитного материала. На каждом С-образном магнитопроводе 1 имеется фаза 2 обмотки статора. Ротор 8 выполнен из ферромагнитного материала, установлен на валу 7 и имеет форму цилиндра, смещенного относительно оси. Питание фаз обмотки статора осуществляется переменными напряжениями, сдвинутыми по фазе на угол, меньший пространственного сдвига С-образных магнитопроводов. 9 ил.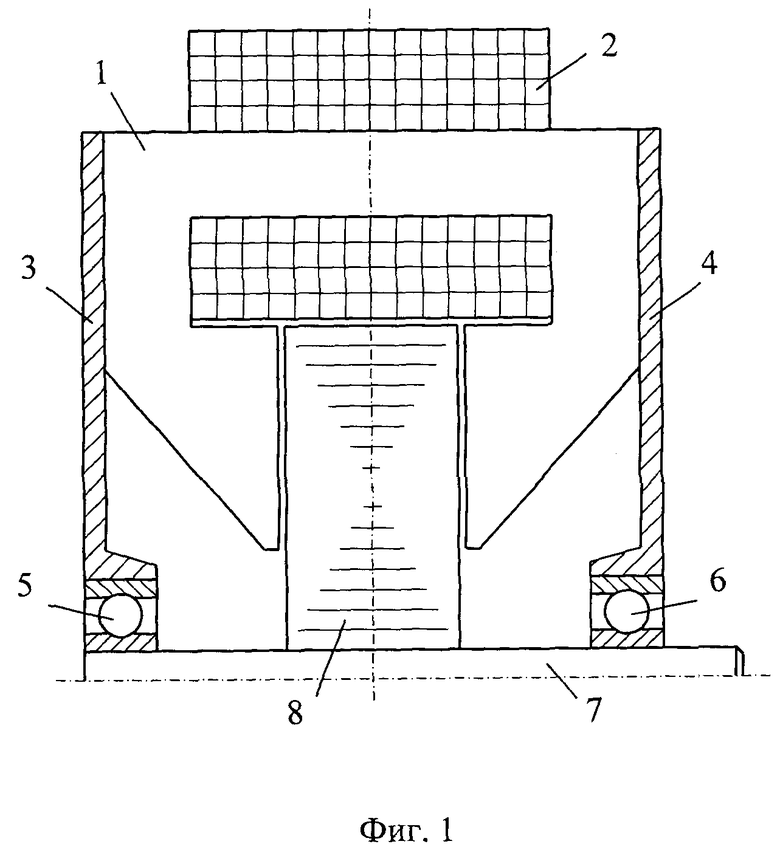
Синхронный электродвигатель, имеющий шихтованные магнитопроводы статора с многофазной сосредоточенной обмоткой, фазы которой питаются напряжениями, сдвинутыми по фазе на угол, меньший пространственного сдвига магнитопроводов, и ферромагнитный ротор, отличающийся тем, что магнитопроводы статора имеют С-образную форму с плоскими рабочими зазорами, а цилиндрический ротор смещен относительно оси вращения.
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2012 |
|
RU2499344C1 |
| Униполярный двигатель с катящимся ротором | 1977 |
|
SU752651A1 |
| Двухфазный электродвигатель с катящимся ротором | 1974 |
|
SU523493A1 |
| US 7049721 B2, 23.05.2006 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ МОЗАИЧНОГО ПАННО | 2023 |
|
RU2830020C1 |
| JP 58022556 A, 09.02.1983. | |||

