Изобретение относится к электрическим машинам, а конкретно к шаговым электродвигателям с дискретным вращением, и может быть использовано в качестве исполнительного двигателя с большим вращающим моментом в механических системах с большим ресурсом работы при ударных нагрузках, например в системах без датчика угла.
Известен многофазный шаговый электродвигатель, содержащий корпус, ротор с зубцами на валу и статор со смещенными относительно друг друга на 1/m (m - число фаз) зубцового деления ротора фазными зонами, состоящими из рядом расположенных зубчатых полюсов, охватываемых последовательно-встречно соединенными между собой катушками фазы (патент РФ №2113755, H02K 37/02, опубл. 2003.12.27, бюл. №36) - [1].
Недостатком данного двигателя являются низкие массогабаритные показатели, поскольку взаимодействие между статором и ротором происходит на одной цилиндрической поверхности в рабочем зазоре.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому эффекту является шаговый электродвигатель, содержащий корпус, магнитопровод ротора с зубцами на валу, пакет статора с многофазной обмоткой и с полюсами, имеющими зубцы, причем зубцы на соседних полюсах сдвинуты относительно друг друга на 1/m зубцового деления, где m - число фаз, чередующиеся коаксиальные полые цилиндры ротора и статора, состоящие из ферромагнитных и немагнитных элементов, расположенных вдоль оси вращения, причем цилиндры ротора механически связаны с магнитопроводом ротора, а цилиндры статора - с корпусом, при этом зубцы полюсов и ферромагнитные элементы цилиндров статора, а также зубцы магнитопровода и ферромагнитные элементы цилиндров ротора имеют свои одинаковые угловые положения (Афанасьев А.Ю., Давыдов Н.В. Шаговый электродвигатель. Патент РФ №2321144, МПК7 Н02K 37/02, опубл. 2008.03.27, бюл. №9) - [2].
Его недостатком является наличие тонкостенных полых цилиндров с консольным креплением, что усложняет технологию изготовления, ограничивает скорость вращения и снижает надежность при работе на подвижном основании.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в создании шагового электродвигателя с более технологичной конструкцией, допускающей большие скорости вращения и надежную работу на подвижном основании.
Технический результат достигается тем, что в шаговый электродвигатель, содержащий корпус, вал с подшипниками, пакет статора с зубцами и с многофазной обмоткой, введены чередующиеся диски ротора и статора, состоящие из ферромагнитных и немагнитных элементов в виде секторов, пакет статора выполнен в виде двух колец из ленты электротехнической стали путем навивки, расположенных по торцам электродвигателя, накладные зубцы с катушками установлены на торцевой поверхности магнитопровода статора, на поверхности зубцов и на другом магнитопроводе имеются клиновидные выступы, на соседних зубцах выступы сдвинуты относительно друг друга на 1/m зубцового деления, где m - число фаз, при этом выступы зубцов и ферромагнитные элементы дисков статора, а также ферромагнитные элементы дисков ротора имеют свои одинаковые угловые положения, причем все ферромагнитные элементы и выступы имеют одинаковые угловые размеры.
Сущность заявленного изобретения поясняется на Фиг.1, где
Фиг.1 - продольное сечение шагового электродвигателя с одной обмоткой статора;
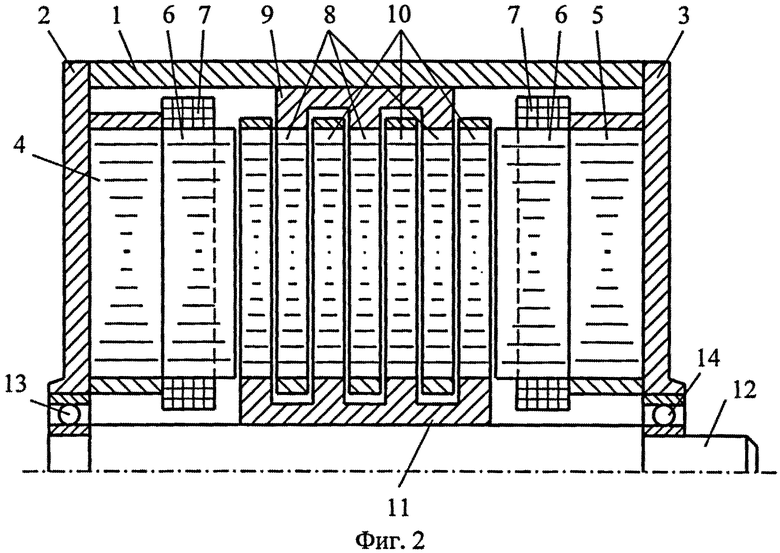
Фиг.2 - продольное сечение шагового электродвигателя с двумя обмотками статора;
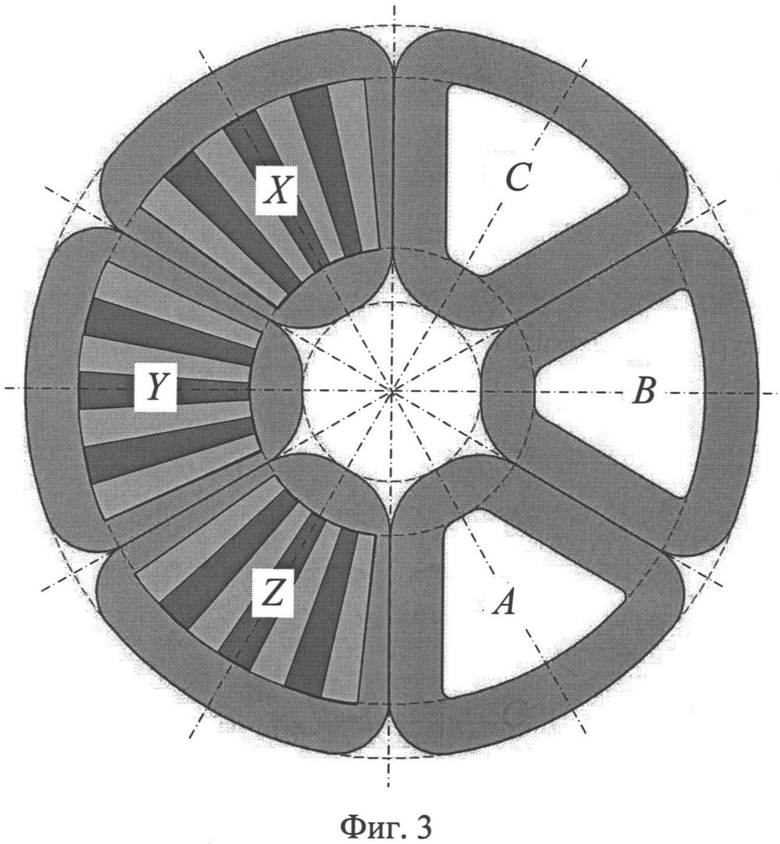
Фиг.3 - зубцы с катушками;
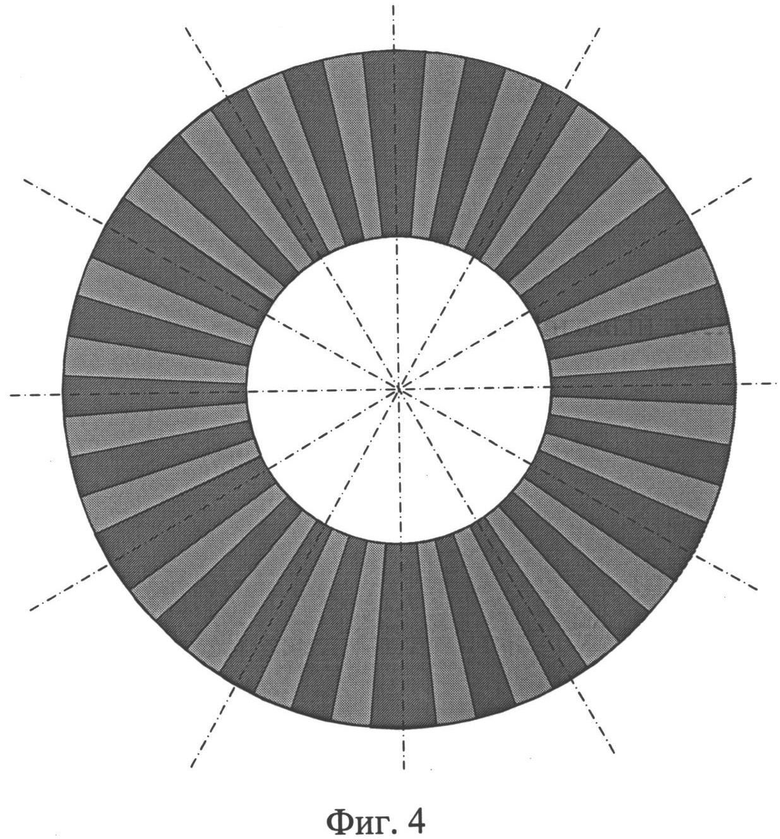
Фиг.4 - диск статора;
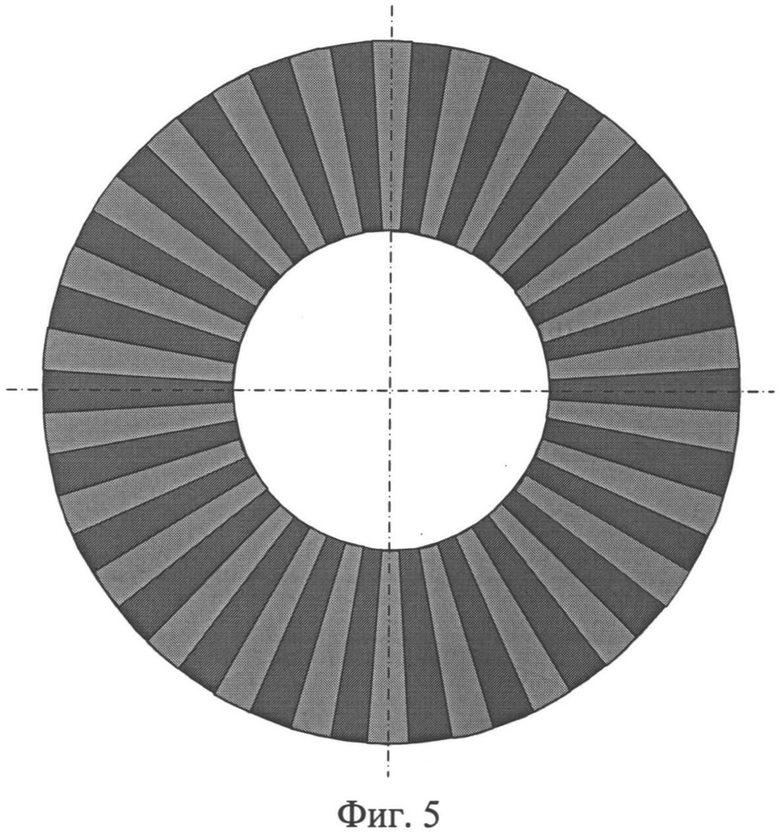
Фиг.5 - диск ротора;
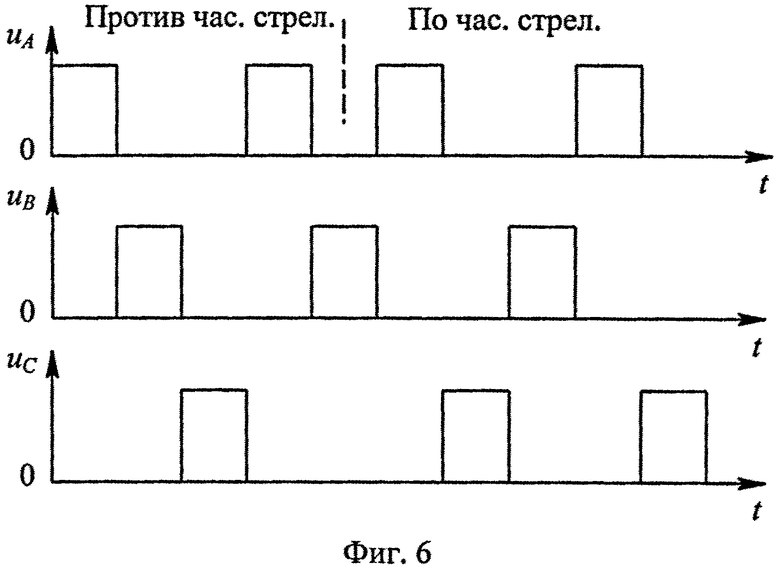
Фиг.6 - графики фазных напряжений;
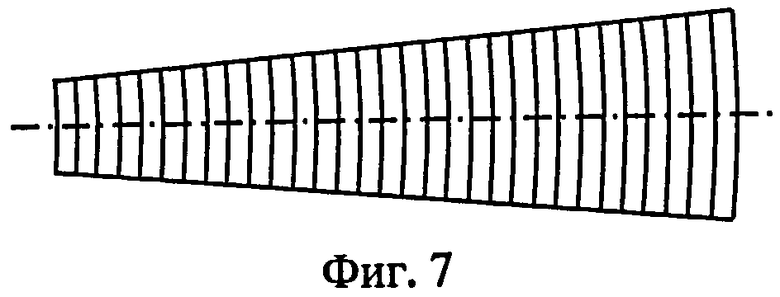
Фиг.7 - форма листов шихтованного ферромагнитного элемента.
Здесь 1 - корпус; 2, 3 - подшипниковые щиты; 4, 5 - магнитопроводы статора; 6 - зубец; 7 - катушка; 8 - диски статора; 9 - втулка статора; 10 - диски ротора; 11 - втулка ротора; 12 - вал; 13, 14 - подшипники.
Корпус 1 жестко связан с подшипниковыми щитами 2, 3. На них установлены кольцевые магнитопроводы 4, 5 статора. На магнитопроводе 4 имеются шесть зубцов 6 с катушками 7.
Диски 8 статора закреплены на втулке 9 статора, установленной на корпусе 1. Диски 10 ротора установлены на втулке 11 ротора. Вал 12 опирается на подшипники 13, 14, установленные в подшипниковых щитах 2, 3.
Магнитопроводы 4, 5 и зубцы 6 выполнены лентой из электротехнической стали путем навивки. Диски 8 статора и диски 10 ротора имеют чередующиеся элементы из магнитомягкого и немагнитного материалов. Магнитные элементы имеют форму секторов и выполнены шихтованными из электротехнической стали. Количество магнитных элементов дисков статора и ротора, приходящихся на одно полюсное деление, отличаются на единицу. На фиг.4, 5 показан случай, когда p=1, число магнитных элементов диска статора zc=24, диска ротора zp=26.
Диски 8 статора имеют ферромагнитные элементы, образующие шесть групп по числу зубцов статора (на фиг.4 показаны светлым цветом), и немагнитные сектора (на фиг.4 показаны темным цветом). Ферромагнитные элементы соседних групп сдвинуты относительно друг друга на 1/m зубцового деления, где m - число фаз. Здесь m=3.
Диски 10 ротора имеют ферромагнитные элементы, расположенные равномерно по окружности (на фиг.5 показаны светлым цветом), и немагнитные сектора (на фиг.5 показаны темным цветом).
Зубцы 6 имеют вид секторов из электротехнической стали и содержат коронки (показаны на фиг.3 слева). Они установлены на магнитопроводе 4 статора. На поверхности зубцов и на другом магнитопроводе имеются клиновидные выступы, на соседних зубцах выступы сдвинуты относительно друг друга на 1/m зубцового деления, где m - число фаз. Катушки, расположенные диаметрально, соединены последовательно согласно и образуют три фазы обмотки статора: А, В и С. На фиг.3 буквами X, Y, Z обозначены зубцы с катушками, создающими магнитные потоки, направленные противоположно потокам зубцов А, В, С. Число пар полюсов здесь р=1. Например, если зубец А создает полюс N, то зубец Х - полюс S.
Все ферромагнитные элементы и выступы зубцов имеют одинаковые угловые размеры.
Шаговый электродвигатель работает следующим образом. При подаче на фазу А статора импульса напряжения (см. фиг.6) ротор поворачивается в положение, при котором восемь ферромагнитных элементов ротора располагаются напротив выступов на зубцах фазы А и соответствующих ферромагнитных элементов дисков статора.
При подаче на фазу В статора импульса напряжения ротор поворачивается на треть зубцового деления в положение, при котором восемь ферромагнитных элементов на каждом диске ротора располагаются напротив выступов на зубцах фазы В и соответствующих ферромагнитных элементов дисков статора, и т.д. В данном случае каждый импульс вызывает поворот ротора на угол 2π/3zp=π/39. Если импульсы имеют частоту f, то ротор вращается с угловой скоростью ωр=2πf/3zp.
У шагового электродвигателя по фиг.2 имеются две обмотки, расположенные на двух кольцах 4, 5 пакета статора, что облегчает охлаждение и делает симметричным магнитное поле в рабочей зоне.
Наличие нескольких дисков статора и ротора вызывает многократную деформацию магнитного поля в зоне дисков, что увеличивает развиваемый момент и позволяет улучшить массогабаритные показатели.
На торцевой поверхности магнитопровода 5 статора, обращенной к активной зоне, имеются ферромагнитные выступы в виде секторов, повторяющие по форме и количеству ферромагнитные элементы дисков статора, что увеличивает развиваемый момент.
Магнитные секторы статора и ротора выполнены из электротехнической стали шихтованными для уменьшения потерь в стали на вихревые токи и гистерезис, поскольку в процессе работы магнитная индукция в секторах изменяется. На фиг.7 показана форма листов шихтованного ферромагнитного элемента, выполняемого из электротехнической стали.
Передача момента редуктора является упругой. При увеличении момента нагрузки на валу медленного вращения он отстает на некоторый угол от положения, соответствующего холостому ходу.
Таким образом, в результате введения чередующихся дисков ротора и статора, состоящих из ферромагнитных и немагнитных элементов в виде секторов, выполнения пакета статора в виде двух колец с накладными зубцами с катушками, выполнения на поверхности зубцов и на магнитопроводе клиновидных выступов со сдвигом на соседних зубцах на 1/m зубцового деления, где m - число фаз, при этом клиновидные зубцы полюсов и ферромагнитные элементы дисков статора, а также ферромагнитные элементы дисков ротора имеют свои одинаковые угловые положения, причем все ферромагнитные элементы и зубцы имеют одинаковые угловые размеры, получен шаговый электродвигатель с технологичной конструкцией, допускающей большие скорости вращения и надежную работу на подвижном основании.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2596145C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2013 |
|
RU2545167C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2013 |
|
RU2544835C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2015 |
|
RU2604058C1 |
| Синхронный электродвигатель с магнитной редукцией | 2017 |
|
RU2668817C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2588230C1 |
| Синхронный электродвигатель для винта вертолета | 2019 |
|
RU2708382C1 |
| Синхронный электродвигатель с магнитной редукцией | 2018 |
|
RU2704491C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2015 |
|
RU2588599C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2673587C1 |
Изобретение относится к электрическим машинам, а конкретно к шаговым электродвигателям с дискретным вращением, и может быть использовано в качестве исполнительного двигателя с большим вращающим моментом в механических системах с большим ресурсом работы при ударных нагрузках, например в системах без датчика угла. Технический результат состоит в повышении технологичности, скорости и надежности работы на подвижном основании. Шаговый электродвигатель содержит корпус 1 и подшипниковые щиты 2, 3, на которых установлены магнитопроводы 4, 5. На магнитопроводе 4 установлены клиновидные зубцы 6 с катушками 7. Диски статора 8 установлены на втулке 9 статора. Диски 10 ротора установлены на втулке 11 ротора, закрепленной на валу 12, опирающемся на подшипники 13, 14. Диски статора и ротора имеют чередующиеся ферромагнитные и немагнитные элементы. Ферромагнитные элементы дисков статора образуют шесть групп, ферромагнитные элементы которых смещены на треть зубцового деления. Ферромагнитные элементы дисков ротора расположены равномерно по окружности. 7 ил.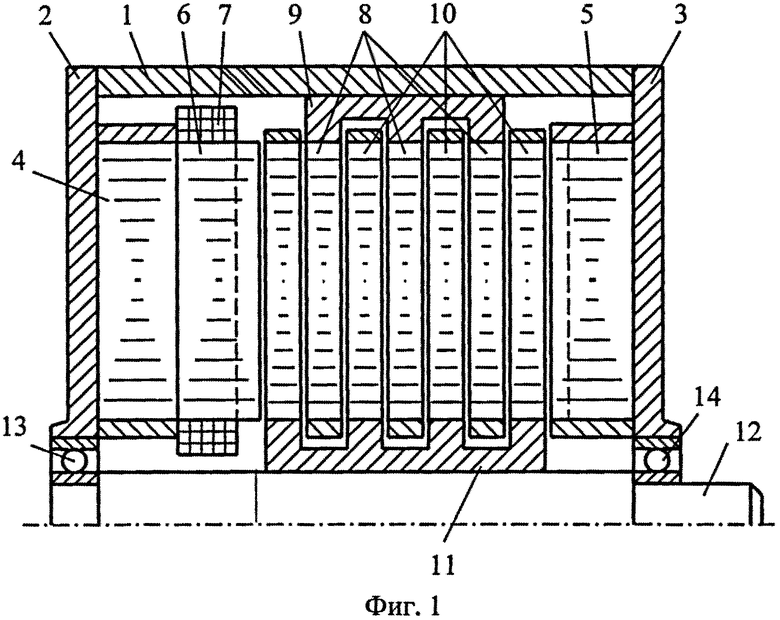
Шаговый электродвигатель, содержащий корпус, вал с подшипниками, пакет статора с зубцами и с многофазной обмоткой, отличающийся тем, что введены чередующиеся диски ротора и статора, состоящие из ферромагнитных и немагнитных элементов в виде секторов, пакет статора выполнен в виде двух колец из ленты электротехнической стали путем навивки, расположенных по торцам электродвигателя, накладные зубцы с катушками установлены на торцевой поверхности магнитопровода статора, на поверхности зубцов и на другом магнитопроводе имеются клиновидные выступы, на соседних зубцах выступы сдвинуты относительно друг друга на 1/m зубцового деления, где m - число фаз, при этом выступы зубцов и ферромагнитные элементы дисков статора, а также ферромагнитные элементы дисков ротора имеют свои одинаковые угловые положения, причем все ферромагнитные элементы и зубцы имеют одинаковые угловые размеры.
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321144C1 |
| М-ФАЗНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1993 |
|
RU2113755C1 |
| Многостаторный реактивный шаговый электродвигатель | 1984 |
|
SU1236589A1 |
| Многостаторный шаговый электродвигатель | 1977 |
|
SU639097A1 |
| Многостаторный шаговый двигатель | 1973 |
|
SU458076A1 |
| Электрический реактивный шаговый двигатель | 1957 |
|
SU118037A1 |
| CN 102204071 A, 28.09.2011 | |||

