Настоящее изобретение относится к устройству для оптической идентификации пола убойной свиньи на основании фенотипических половых признаков.
В частности, настоящее изобретение основано на общей проблеме, заключающейся в том, что самцы убойных свиней часто имеют свойственный им запах, который сильно выражен и, в общем, является нежелательным для мясопереработки, так называемый специфический запах хряка.
Следовательно, для оценки и надлежащей дальнейшей обработки соответствующей убойной свиньи необходимо либо выявить наличие специфического запаха убойной свиньи, либо установить ее пол.
Однако выявление специфического запаха является сложным с технической точки зрения и, следовательно, сравнительно дорогостоящим и затратным по времени, в частности, если оно применяется ко всем убойным свиньям на производственном объекте по переработке убойных свиней, для того, чтобы таким образом исключить наличие нежелательного специфического запаха хряка перед соответствующей дальнейшей переработкой убойных свиней.
В качестве альтернативы, пол убойной свиньи можно определить при подготовке к ее переработке, чтобы таким образом иметь возможность исключения потенциального специфического запаха убойной свиньи.
Один возможный способ определения пола заключается, например, в ручном осуществлении этого определения соответствующим персоналом и в последующей подаче убойных свиней в соответствующий блок переработки.
Тем не менее, такое ручное определение пола связано, в частности, с большим объемом работы для персонала и, соответственно, с высокими затратами на персонал.
В известном уровне техники существуют способы оптического захвата признаков живых свиней. В этой связи, например, способ непрерывного контроля свиней описан в документе EP 2 168 430 A1, который предусматривает систему оптического захвата в станции контроля, посредством которой физические измеренные величины свиньи, стоящей в станции контроля, можно получить и предоставить для анализа. Свинью впоследствии классифицируют на основании полученных физических измеренных величин. Классификация согласно половой принадлежности также описана в данном случае, причем с этой целью используются физические характеристики, такие как длина туловища, ширина плеч, форма бедер и т.д.
Недостаток описанного здесь способа заключается в его неточности, вызванной свойственным породе и примерным отклонением физических размеров и пропорций.
Кроме этого, в известном уровне техники известно осуществление определения пола применительно к убойным свиньям на основании количества жира или мяса, расположенных на брюхе. Такие способы также связаны с ограниченной достоверностью определения.
Цель настоящего изобретения заключается в предоставлении устройства для автоматической, быстрой и одновременно эффективной и экономичной классификации фенотипического пола убойной свиньи на производственном объекте по переработке убойных свиней.
Настоящая цель достигается с помощью устройства для оптической идентификации пола убойной свиньи, обладающего признаками, изложенными в пункте 1 формулы изобретения. Предпочтительные улучшения изложены в зависимых пунктах формулы изобретения.
Все варианты убойных свиней, в частности независимо от пола, в дальнейшем обозначены термином «убойная свинья».
Под фенотипическим полом понимается разделение на некастрированных самцов (также называемых хряками или некастрированными хряками), кастрированных самцов (также называемых боровами), самцов с яичками, частично или полностью скрытыми внутри (также называемых хряками-крипторхидами), и самок (также называемых свиноматками).
В контексте настоящей заявки определение фенотипического пола считается классификацией.
Убойную свинью, чей фенотипический пол необходимо определить, направляют подвешенной на трубчатой направляющей на перерабатывающий производственный объект.
Убойную свинью предпочтительно размещают подвешенной задними ногами за крюки, расположенные вблизи друг от друга на оси движения, причем поверхность ее генитальной области по существу выровнена таким образом, чтобы ее было видно с точки съемки, перпендикулярной трубчатой направляющей. Все области поверхности убойной свиньи, на которых расположены мужские или женские половые органы, считаются генитальной областью в контексте настоящего изобретения, так что могут быть задействованы области, отличающиеся в пространственном отношении, в зависимости от мужского или женского пола предоставленных убойных животных. Описанный далее захват генитальной области убойной свиньи осуществляется перед разделением.
Устройство согласно изобретению для оптической идентификации пола убойной свиньи содержит камеру с восприятием глубины сцены, имеющую область захвата камеры с восприятием глубины сцены, причем генитальная область убойной свиньи может быть захвачена в пределах области захвата камеры с восприятием глубины сцены, и при этом пространственные координаты пикселей могут быть захвачены в пределах области захвата камеры с восприятием глубины сцены.
Пространственные координаты захваченных пикселей состоят в данном случае из их координат поверхности (x, y) и значения глубины (z) и предоставлены в форме, пригодной для передачи, камерой с восприятием глубины сцены.
Захват пикселей камерой с восприятием глубины сцены осуществляется в режиме реального времени согласно изобретению. В данном случае, камера с восприятием глубины сцены предпочтительно способна захватывать пиксели с их пространственными координатами в области захвата камеры с восприятием глубины сцены одновременно или в настолько короткий период времени, что перемещение убойной свиньи посредством трубчатой направляющей не ухудшает захват изображения, пригодного для анализа.
Устройство согласно изобретению дополнительно содержит позиционирующее устройство, посредством которого камеру с восприятием глубины сцены можно размещать относительно генитальной области убойной свиньи.
В данном случае размещение камеры с восприятием глубины сцены относительно убойной свиньи предпочтительно осуществляется таким образом, чтобы позволить осуществлять вертикальный оптический захват генитальной области, т.е., ориентированный сверху на подвешенное убойное животное. В данном контексте было обнаружено, что в случае вертикального оптического захвата генитальной области, изменения глубины, которые могут быть захвачены, максимально выражены, и, следовательно, таким образом может быть предоставлен оптимальный захват половых признаков убойной свиньи. Тем не менее, также возможно размещение камеры с восприятием глубины сцены сверху по диагонали.
В качестве дополнительного признака, устройство согласно изобретению содержит анализирующий блок, соединенный проводным или беспроводным образом с камерой с восприятием глубины сцены, и посредством которого пространственные координаты, предоставленные камерой с восприятием глубины сцены, могут быть захвачены в виде трехмерного изображения генитальной области. На основании пространственных координат трехмерного изображения анализирующий блок способен точно определить фенотипический пол убойной свиньи и, следовательно, классифицировать ее соответствующим образом. В таком случае, признаки, необходимые для идентификации фенотипического пола, извлекаются из пространственных координат, и последующая классификация убойной свиньи предпочтительно осуществляется на основании правила эвристического решения или на основании предварительно определенного классификатора.
Анализирующий блок может выводить результат классификации убойной свиньи, например, посредством кода или в виде незашифрованного текста или может предоставлять его внешним блокам, например, сортирующим блокам, в качестве управляющего сигнала для дальнейшей переработки убойной свиньи. Кроме этого, результат классификации может быть сохранен во внутренней или внешней базе данных с привязкой к идентификационному коду убойной свиньи. Кроме этого, для доказательства или для проверки результата классификации, трехмерное изображение, полученное камерой с восприятием глубины сцены, может быть сохранено с привязкой к идентификационному коду убойной свиньи.
Изобретение основано на идентификации пространственного расположения наружных половых органов убойной свиньи.
Кроме этого, в качестве особого преимущества, анализирующий блок способен устанавливать различия между убойной свиньей и окружающим фоном исключительно на основании значений глубины захваченных пространственных координат, не требуя дополнительных средств. В частности, с этим связано преимущество, заключающееся в отсутствии необходимости в фоновой панели или в особом освещении.
В качестве дополнительного преимущества, не требуются средства для размещения убойной свиньи на точном расстоянии, поскольку информация о расстоянии уже предоставлена величиной глубины, захваченной камерой с восприятием глубины сцены, и может быть включена в анализ.
Кроме этого, в качестве дополнительного преимущества, инициирование захвата и последующая классификация могут происходить без дополнительных средств. С этой целью, камера с восприятием глубины сцены предпочтительно расположена относительно убойной свиньи таким образом, чтобы, помимо генитальной области, также можно было захватывать области присоединения бедер убойной свиньи. Когда убойную свинью направляют мимо устройства согласно изобретению, в данном случае, анализирующий блок устанавливает различия между дальними значениями глубины захваченных пикселей окружающего фона и ближними значениями глубины захваченных пикселей убойной свиньи. Таким образом, в качестве особого преимущества устройства, обнаружение перемещения убойной свиньи на трубчатой направляющей может осуществляться анализирующим блоком и, при распознавании убойной свиньи на основании изменяющихся значений глубины, может выполняться инициирование захвата генитальной области. Следовательно, можно преимущественным образом обойтись без дополнительных устройств или мер для инициирования.
В качестве дополнения, благодаря предварительно определенному пороговому значению глубины, анализирующий блок способен ограничивать захваченные величины глубины, в частности до потенциальной области влагалища, яичек или пениса, например для получения, таким образом, возможности отображения только этих значимых областей в трехмерном изображении.
Кроме этого, возможно, чтобы при процедуре распознавания несколько изображений или последовательностей изображений фиксировались камерой с восприятием глубины сцены, и пространственные координаты нескольких изображений или последовательностей изображений захватывались анализирующим блоком и использовались для классификации с целью повышения достоверности результата. Таким образом, особые преимущества обеспечивают возможность увеличения пространственной разрешающей способности и возможности уменьшения эффектов затемнения.
Особое преимущество устройства согласно изобретению по сравнению с известными системами также заключается в том, что определение фенотипического пола может выполняться в режиме онлайн и в реальном времени устройством, в котором осуществляется непосредственный захват на убойной свинье, направляемой на трубчатой направляющей, и результат классификации предоставляется незамедлительно в соответствии со временем и доступен для решений, используемых для дальнейшей переработки и для оценки. Таким образом, в частности, распознанных некастрированных хряков преимущественно можно целенаправленно подавать для проверки наличия специфического запаха хряка перед переработкой. Кроме этого, можно теоретически вывести требования к разделению туш на части, поскольку специфические виды выходящей продукции, например пропорция постного мяса, связаны с полом убойной свиньи.
Способность камеры с восприятием глубины сцены работать в режиме реального времени и незамедлительный анализ захваченных пикселей применяются с данной целью, так что можно обеспечить очень быструю и одновременно точную идентификацию пола убойной свиньи, которая не оказывает негативного влияния на последовательность переработки убойной свиньи.
В качестве дополнения, особенно экономичная идентификация пола убойных свиней на производственном объекте по переработке убойных свиней обеспечивается с помощью по существу автоматизированной последовательности.
Кроме этого, результат классификации можно сохранять непосредственно в базе данных, и, таким образом, он доступен для дальнейшего использования в целях доказательства и проверки и для дальнейших анализов.
В одном преимущественном усовершенствовании изобретения камера с восприятием глубины сцены выполнена в виде системы стереоскопической камеры, содержащей аппарат для проецирования шаблонов.
Благодаря аппарату для проецирования шаблонов камера с восприятием глубины сцены способна генерировать искусственную текстуру на поверхности убойной свиньи, в частности в генитальной области.
В этом случае аппарат для проецирования шаблонов может быть выполнен, например, в виде кинопроектора.
Особенно точный захват значимых пикселей в области указанной генитальной области обеспечивается на основании шаблона, генерируемого на поверхности убойной свиньи.
Кроме этого, в случае изложенной здесь конструкции камеры с восприятием глубины сцены в виде системы стереоскопической камеры, отдельный источник света для освещения значимой области убойной свиньи может не использоваться, поскольку в этом случае камера с восприятием глубины сцены уже содержит установленный источник света.
Таким образом, можно сохранять низкие затраты на устройство согласно изобретению и идентификацию пола, которую можно осуществлять с его применением.
Кроме этого, преимущественный вариант изобретения предусматривает, что камера с восприятием глубины сцены выполнена в виде времяпролетной камеры, которая также обозначена в дальнейшем термином «TOF-камера».
Применение TOF-камеры предоставляет преимущество, в частности заключающееся в возможности применения высоких скоростей съемки, благодаря чему изображения всей значимой области убойной свиньи могут быть получены за одну съемку и, следовательно, за очень короткое время. Следовательно, такая TOF-камера особенно подходит для захвата в режиме реального времени генитальной области убойной свиньи, который обеспечивается согласно изобретению.
В дополнение, TOF-камеры обычно имеют простую конструкцию и, следовательно, могут быть предоставлены сравнительно экономичным образом.
В дальнейшем, предпочтительном варианте осуществления устройства камера с восприятием глубины сцены представляет собой первую камеру с восприятием глубины сцены и область захвата камеры с восприятием глубины сцены представляет собой область захвата первой камеры с восприятием глубины сцены. В этом случае первая камера с восприятием глубины сцены расположена относительно убойной свиньи таким образом, чтобы генитальная область могла быть оптически захвачена на задней части туши в области захвата первой камеры с восприятием глубины сцены и соответствующие пиксели задней части туши могли быть захвачены с их пространственными координатами.
В дополнение, в описанном здесь варианте осуществления, устройство содержит вторую камеру с восприятием глубины сцены, имеющую область захвата второй камеры с восприятием глубины сцены. Вторая камера с восприятием глубины сцены в данном случае расположена напротив убойной свиньи таким образом, чтобы генитальная область убойной свиньи могла быть захвачена на брюхе в области захвата второй камеры с восприятием глубины сцены и соответственно пиксели со стороны брюха могли быть захвачены с их пространственными координатами.
Пространственные координаты из соответствующей области захвата камеры с восприятием глубины сцены предоставлены в форме, пригодной для передачи, камерами с восприятием глубины сцены и захватываются анализирующим блоком, предпочтительно в системе однородных координат.
Было обнаружено, что вид задней части туши предлагает оптимальную точку обзора явно выраженных яичек или женских половых органов, в то время как вид брюха предлагает оптимальную точку обзора яичек, скрытых в складке кожи убойной свиньи в случае хряка-крипторхида, и, следовательно, которые можно идентифицировать снаружи как выпуклость.
Сочетание двух камер с восприятием глубины сцены с противоположными областями захвата камер с восприятием глубины сцены предлагает преимущество, в данном случае заключающееся в возможности захвата генитальной области убойной свиньи с разных точек обзора и, следовательно, достоверность результатов определения пола может быть дополнительно оптимизирована.
Особенно преимущественное усовершенствование изобретения дополнительно предусматривает, чтобы устройство содержало фотокамеру, имеющую область захвата фотокамеры, в которой могут быть захвачены значения освещенности пикселей на поверхности убойной свиньи в области указанной генитальной области.
В данном случае фотокамера присоединена к анализирующему блоку и может размещаться посредством позиционирующего устройства относительно камеры с восприятием глубины сцены таким образом, чтобы область захвата фотокамеры и область захвата камеры с восприятием глубины сцены по меньшей мере частично перекрывали друг друга в общей области захвата.
В случае размещения двух противоположных камер с восприятием глубины сцены согласно пункту 4 формулы изобретения камера с восприятием глубины сцены может быть выделена соответствующей фотокамере так, что пиксели на поверхности убойной свиньи в области указанной генитальной области могут быть захвачены как на виде задней части туши, так и на виде брюха.
Захваченные пиксели передаются фотокамерой в анализирующий блок и визуализируются в нем в виде изображения генитальной области.
В частности, предоставленное изображение используется для проверки результата идентификации пола и для архивного хранения.
Кроме этого, фотокамера может быть выполнена, например, в виде фотокамеры, передающей цветовые характеристики, так, что изображение, предоставленное анализирующим блоком, предоставляется в виде цветного изображения.
Настоящее изобретение будет подробнее описано в качестве примерного варианта осуществления на основании следующих фигур.
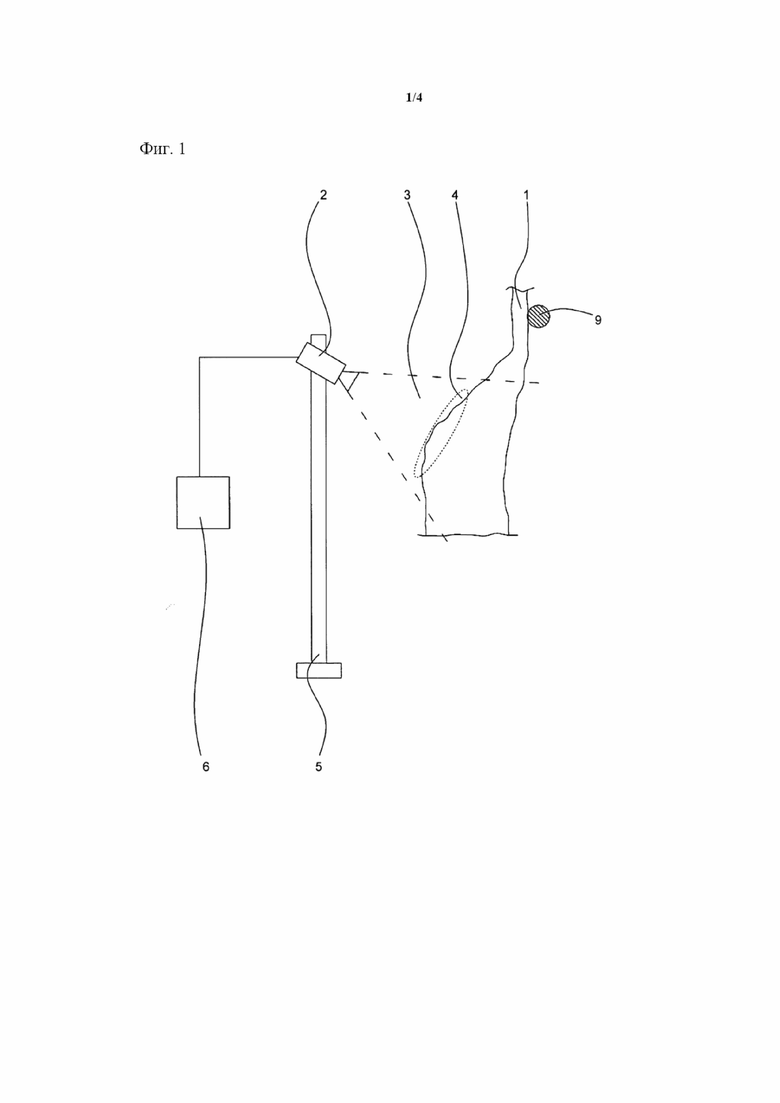
Фиг. 1 представляет собой схематическое изображение, вид сбоку.
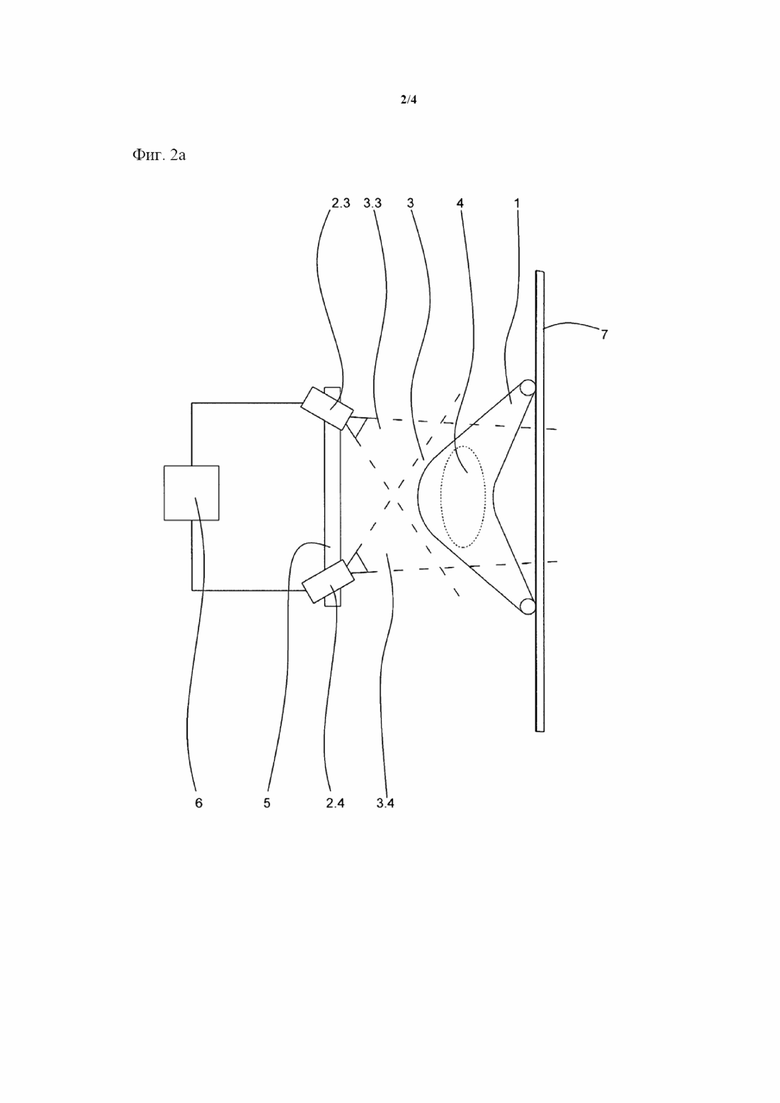
Фиг. 2a представляет собой схематическое изображение со стереоскопической камерой, вид сверху.
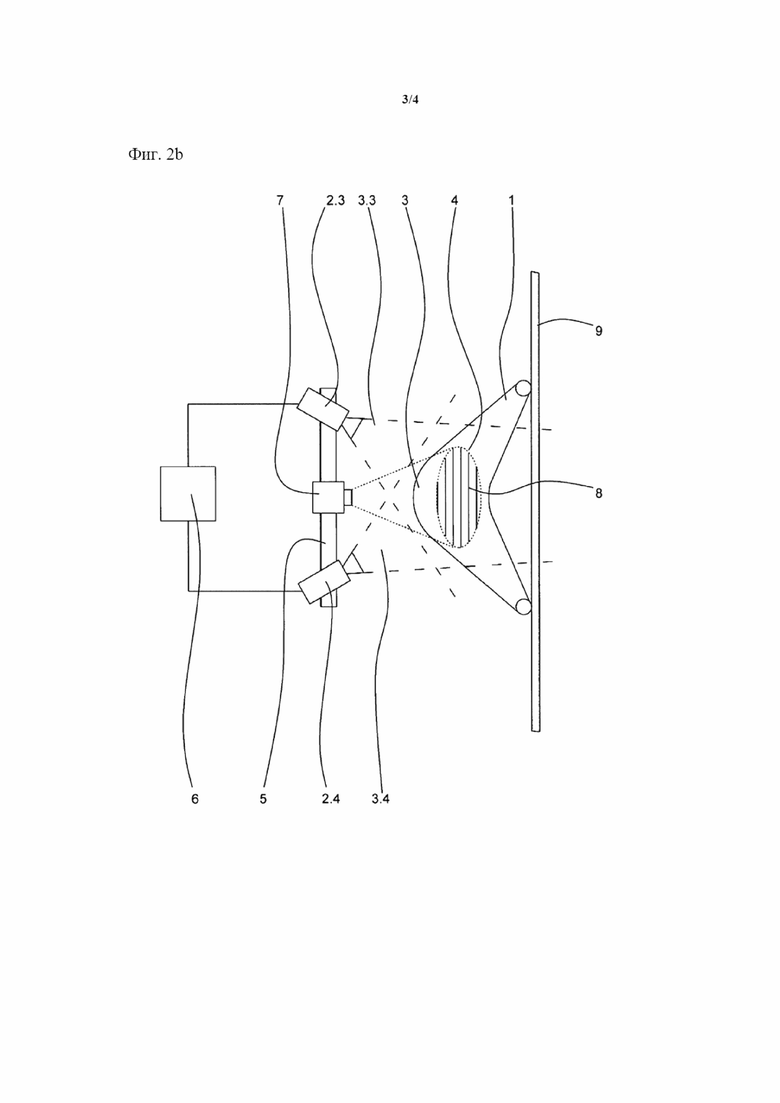
Фиг. 2b представляет собой схематическое изображение со стереоскопической камерой и аппаратом для проецирования шаблонов, вид сверху.
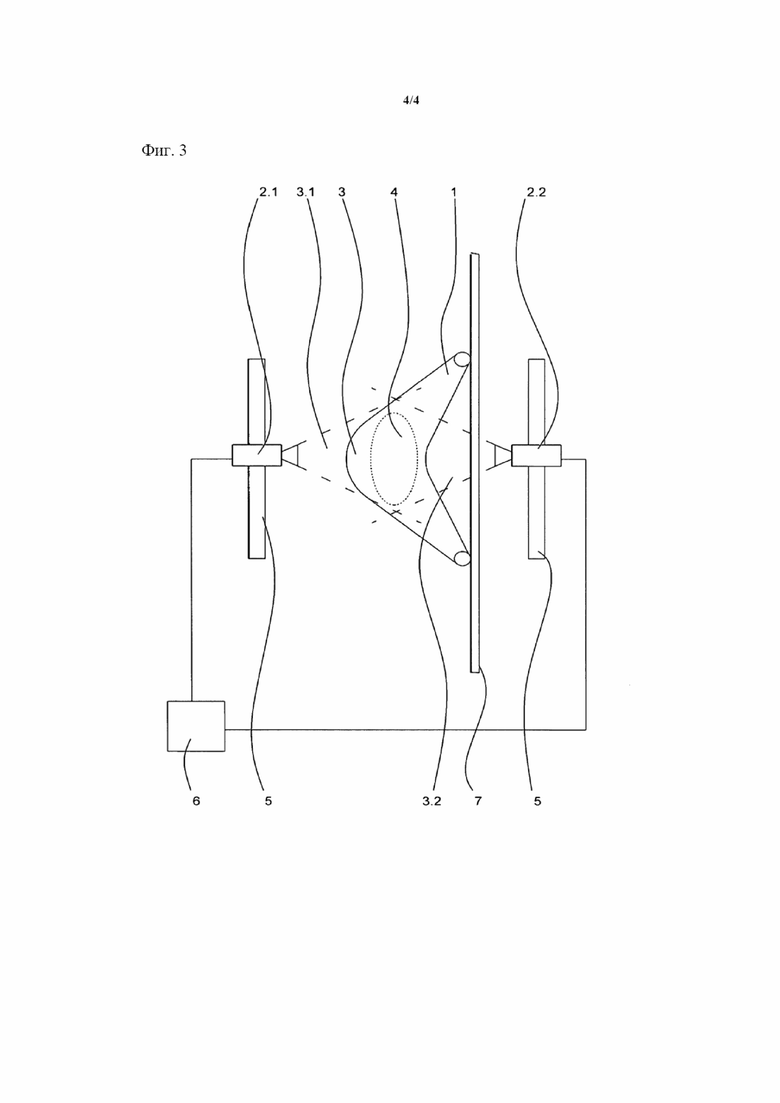
Фиг. 3 представляет собой схематическое изображение, вид сверху с двумя камерами с восприятием глубины сцены,
причем убойная свинья, которую необходимо захватить, и ее генитальная область изображены на фигурах лишь схематически и в очень упрощенной форме.
На фиг. 1 изображен вид сбоку устройства согласно изобретению для оптической идентификации пола убойной свиньи 1. Убойную свинью 1 направляют по маршруту ее переработки вдоль трубчатой направляющей 7 мимо устройства. В данном случае оптическая идентификация пола осуществляется в процессе переработки убойной свиньи 1 после ошпаривания, механического свежевания, опалки в печи и подвешивания, но в любом случае перед разделением. Такое расположение оптической идентификации пола предоставляет преимущество, в частности заключающееся в том, что волоски или загрязнения, присутствующие на убойной свинье, предварительно были удалены предыдущими обработками и таким образом может быть предоставлена оптимальная идентификация пола.
Устройство согласно изобретению содержит камеру 2 с восприятием глубины сцены, имеющую область 3 захвата камеры с восприятием глубины сцены, в которой может быть захвачена генитальная область 4 убойной свиньи 1.
В дополнение, пространственные координаты пикселей могут быть захвачены в области 3 захвата камеры с восприятием глубины сцены, причем пространственные координаты состоят из соответствующих координат поверхности (x, y) и значения глубины (z) пикселей, и причем захват пространственных координат пикселей происходит в режиме реального времени.
Пространственные координаты предоставлены в форме, пригодной для передачи, камерой 2 с восприятием глубины сцены, причем предоставление пространственных координат предпочтительно также происходит в режиме реального времени.
Кроме этого, устройство содержит позиционирующее устройство 5, посредством которого камера 2 с восприятием глубины сцены может быть размещена в требуемом положении относительно генитальной области 4.
Позиционирование камеры 2 с восприятием глубины сцены осуществляется в данном примерном варианте осуществления таким образом, чтобы она захватывала генитальную область 4 по диагонали сверху.
В качестве дополнительного компонента, устройство согласно изобретению содержит анализирующий блок 6, присоединенный к камере 2 с восприятием глубины сцены и способный захватывать пространственные координаты, предоставленные камерой 2 с восприятием глубины сцены.
Согласно изобретению, анализирующий блок 6 выполняет анализ захваченных пространственных координат, при этом устанавливается наличие фенотипических половых признаков, таких как область яичек или женские половые органы, на основании значений глубины пространственных координат. После установления наличия фенотипических половых признаков анализирующий блок 6 осуществляет классификацию убойной свиньи 1, например, на основании предварительно определенного классификатора, согласно делению на хряков, боровов, свиноматок или хряков-крипторхидов, и выводится результат классификации.
Результат классификации выводится на монитор, который отображает результат классификации, называя фенотипический пол убойной свиньи 1. Параллельно с этим, результат классификации передается, с привязкой к идентификационному коду убойного животного, в центральный компьютер, содержащий подключенную базу данных.
Анализирующий блок автоматически идентифицирует на основании значений глубины (z), когда убойную свинью 1 перемещают посредством трубчатой направляющей 9 в область 3 захвата камеры 2 с восприятием глубины сцены, и инициирует захват изображений и последующий анализ.
На фиг. 2a показан вид сверху устройства согласно изобретению в дальнейшем примерном варианте осуществления.
В изображенном здесь примерном варианте осуществления камера 2 с восприятием глубины сцены выполнена в виде системы стереоскопической камеры, содержащей два объектива 2.3 и 2.4. В данном случае, каждый объектив 2.3, 2.4 имеет отдельную область 3.3, 3.4 захвата, причем в данном случае область 3 захвата камеры с восприятием глубины сцены представляет область, в которой области 3.3, 3.4 захвата двух объективов 2.3, 2.4 камеры 2 с восприятием глубины сцены перекрывают друг друга.
Подобно фиг. 1, объективы 2.3, 2.4 камеры 2 с восприятием глубины сцены расположены в данном случае таким образом, что генитальная область 4 убойной свиньи 1 может быть захвачена по диагонали сверху.
На фиг. 2b показан вид сверху устройства согласно изобретению в дальнейшем примерном варианте осуществления, причем это модификация примерного варианта осуществления, показанного на фиг. 2a.
В изображенном здесь примерном варианте осуществления камера 2 с восприятием глубины сцены также выполнена в виде системы стереоскопической камеры, содержащей два объектива 2.3 и 2.4, причем каждый объектив 2.3, 2.4 в данном случае имеет отдельную область 3.3, 3.4 захвата, при этом, как на фиг. 2a, область 3 захвата камеры с восприятием глубины сцены представляет область, в которой области 3.3, 3.4 захвата двух объективов 2.3, 2.4 камеры 2 с восприятием глубины сцены перекрывают друг друга.
Подобно фиг. 1, объективы 2.3, 2.4 камеры 2 с восприятием глубины сцены расположены в данном случае таким образом, что генитальная область 4 убойной свиньи 1 может быть захвачена по диагонали сверху.
В усовершенствовании, описанном здесь, камера 2 с восприятием глубины сцены дополнительно содержит аппарат 7 для проецирования шаблонов, посредством которого текстуру 8, например, шаблон из полос, можно проецировать на поверхность убойной свиньи 1, в частности в области указанной генитальной области 4.
Поскольку поверхность убойной свиньи 1 по существу лишена структуры, применение аппарата 7 для проецирования шаблонов оказалось особенно преимущественным, поскольку разницы высоты/глубины, присутствующие на поверхности, выделяются благодаря генерируемой текстуре 8 и можно обеспечить особенно эффективный захват пространственных координат и, в частности, значений глубины соответствующих пикселей.
На фиг. 3 показан вид сверху дальнейшего варианта осуществления устройства согласно изобретению.
В изображенном варианте осуществления устройства камера 2 с восприятием глубины сцены выполнена в виде первой камеры 2.1 с восприятием глубины сцены, имеющей область 3.1 захвата первой камеры с восприятием глубины сцены, причем генитальная область 4 убойной свиньи 1 может быть захвачена на виде задней части туши в области 3.1 захвата первой камеры с восприятием глубины сцены.
Как показано на фиг. 3, устройство дополнительно содержит вторую камеру 2.2 с восприятием глубины сцены, имеющую область 3.2 захвата второй камеры с восприятием глубины сцены.
Вторая камера 2.2 с восприятием глубины сцены в данном случае расположена таким образом, чтобы генитальная область 4 убойной свиньи 1 могла быть захвачена на брюхе в области 3.2 захвата второй камеры с восприятием глубины сцены.
В данном случае камеры 2.1 и 2.2 с восприятием глубины сцены могут быть расположены в соответствующих местах посредством позиционирующего устройства 5 так, что в качестве особого преимущества генитальная область 4 убойной свиньи 1 может быть захвачена с обеих сторон, и таким образом может быть оптимизирован результат идентификации пола, предоставленный устройством согласно изобретению.
Перечень ссылочных позиций
1 убойная свинья
2 камера с восприятием глубины сцены
2.1 первая камера с восприятием глубины сцены
2.2 вторая камера с восприятием глубины сцены
2.3 первый объектив
2.4 второй объектив
3 область захвата камеры с восприятием глубины сцены
3.1 область захвата первой камеры с восприятием глубины сцены
3.2 область захвата второй камеры с восприятием глубины сцены
3.3 область захвата первого объектива
3.4 область захвата второго объектива
4 генитальная область
5 позиционирующее устройство
6 анализирующий блок
7 аппарат для проецирования шаблонов
8 текстура
9 трубчатая направляющая
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИЗУАЛЬНОГО ЗАХВАТА ДАННЫХ, ОТНОСЯЩИХСЯ К ЖИВОТНЫМ, КОТОРЫЕ ПОДЛЕЖАТ УБОЮ, ОТ ЖИВОТНОГО, КОТОРОЕ ПОДЛЕЖИТ УБОЮ | 2015 |
|
RU2695454C2 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС ДЛЯ СИСТЕМЫ И СПОСОБА КОРРЕКЦИИ ОСНОВНЫХ РАЗМЕРОВ НА ПАНОРАМНЫХ ИЗОБРАЖЕНИЯХ, ОХВАТЫВАЮЩИХ УГОЛ ОБЗОРА, РАВНЫЙ 360° | 2006 |
|
RU2408930C2 |
| СПОСОБ ПОВЫШЕНИЯ КАЧЕСТВА ЦИФРОВОГО ФОТОИЗОБРАЖЕНИЯ | 2006 |
|
RU2400815C2 |
| УСТРОЙСТВО ТРЕХМЕРНОГО СКАНИРОВАНИЯ СЦЕНЫ С НЕЛАМБЕРТОВЫМИ ЭФФЕКТАМИ ОСВЕЩЕНИЯ | 2014 |
|
RU2573767C1 |
| СИСТЕМА РАСПОЗНАВАНИЯ ПОВЕДЕНИЯ | 2008 |
|
RU2475853C2 |
| СИСТЕМА ДЛЯ РАСПОЗНАВАНИЯ И ОТСЛЕЖИВАНИЯ ПАЛЬЦЕВ | 2012 |
|
RU2605370C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КАРТЫ ГЛУБИНЫ ДЛЯ ИЗОБРАЖЕНИЯ | 2016 |
|
RU2721177C2 |
| Стереопросмотр | 2015 |
|
RU2665872C2 |
| СПОСОБ И АППАРАТУРА ДЛЯ КОДИРОВАНИЯ И ДЕКОДИРОВАНИЯ ГЛУБИНЫ | 2020 |
|
RU2809180C2 |
| МОРФОЛОГИЧЕСКОЕ СГЛАЖИВАНИЕ (МС) ПРИ ПОВТОРНОМ ПРОЕЦИРОВАНИИ ДВУХМЕРНОГО ИЗОБРАЖЕНИЯ | 2011 |
|
RU2562759C2 |
Изобретение относится к устройству для оптической идентификации пола забитой убойной свиньи на основании фенотипических признаков. Технический результат заключается в обеспечении автоматической, быстрой и эффективной классификации фенотипического пола убойной свиньи. Такой результат достигается тем, что устройство для оптической идентификации пола забитой убойной свиньи (1) содержит камеру (2) с восприятием глубины сцены, имеющую область (3) захвата камеры с восприятием глубины сцены, в которой может быть захвачена генитальная область (4) убойной свиньи (1) и в которой могут быть захвачены пространственные координаты пикселей, причем пространственные координаты могут быть предоставлены в форме, пригодной для передачи, и содержащее позиционирующее устройство (5), посредством которого камера (2) с восприятием глубины сцены может быть размещена относительно генитальной области (4) убойной свиньи (1), и содержит анализирующий блок (6), присоединенный к камере (2) с восприятием глубины сцены, и при этом пространственные координаты, предоставленные камерой (2) с восприятием глубины сцены, могут быть захвачены анализирующим блоком (6), и фенотипический пол убойной свиньи (1) может быть определен на основании пространственных координат. 6 з.п. ф-лы, 4 ил.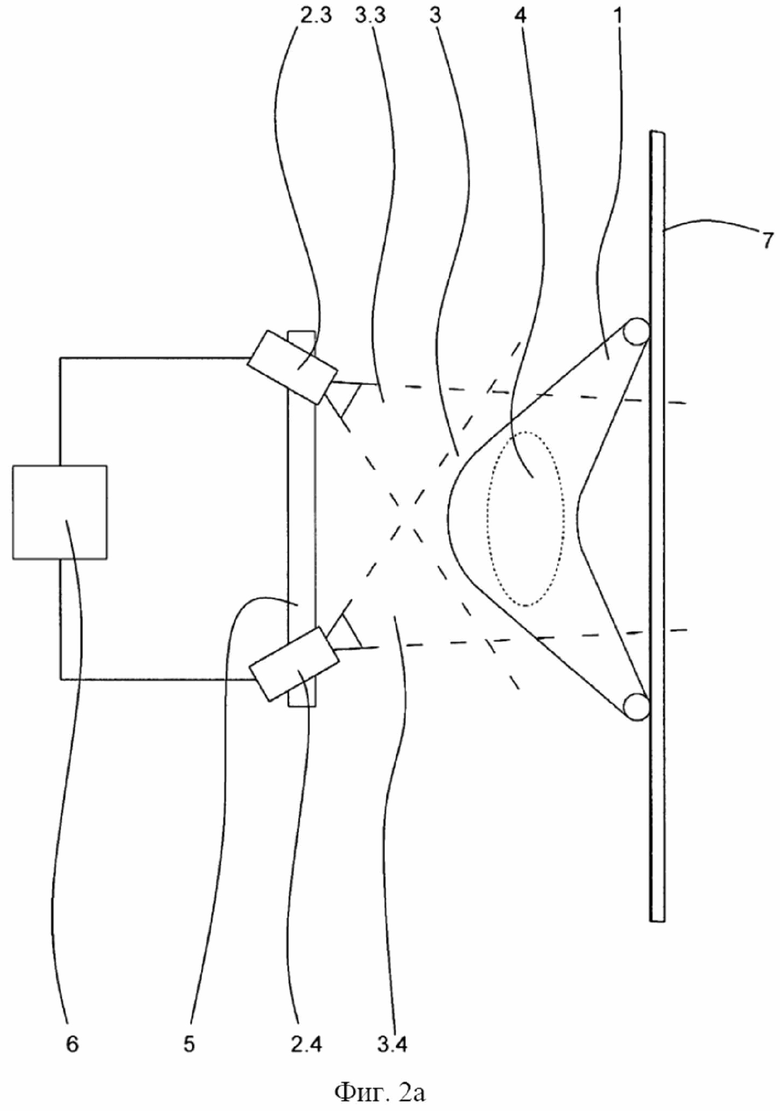
1. Устройство для оптической идентификации пола забитой убойной свиньи (1), содержащее камеру (2) с восприятием глубины сцены, имеющую область (3) захвата камеры с восприятием глубины сцены, в которой может быть захвачена генитальная область (4) убойной свиньи (1) и в которой могут быть захвачены пространственные координаты пикселей, причем пространственные координаты могут быть предоставлены в форме, пригодной для передачи, и содержащее трубчатую направляющую, при этом убойную свинью размещают подвешенной задними ногами на указанной направляющей, причем задние ноги расположены на трубчатой направляющей на расстоянии друг от друга в продольном направлении вдоль оси движения трубчатой направляющей, и содержащее позиционирующее устройство (5), поддерживающее камеру (2) с восприятием глубины сцены, посредством которого камера (2) с восприятием глубины сцены может быть размещена относительно генитальной области (4) убойной свиньи (1), при этом камера (2) с восприятием глубины сцены расположена посредством позиционирующего устройства (5) перпендикулярно указанной трубчатой направляющей, и содержащее анализирующий блок (6), который соединен с камерой (2) с восприятием глубины сцены, и при этом пространственные координаты, предоставленные камерой (2) с восприятием глубины сцены, могут быть захвачены анализирующим блоком (6), и фенотипический пол убойной свиньи (1) может быть точно определен на основании пространственных координат, при этом фенотипическим полом является разделение на некастрированных самцов, кастрированных самцов, самцов с яичками, частично или полностью скрытыми внутри, и самок.
2. Устройство по п. 1, отличающееся тем, что камера (2) с восприятием глубины сцены выполнена в виде системы стереоскопической камеры, содержащей аппарат (7) для проецирования шаблонов, причем текстура (8) может быть спроецирована на поверхность убойной свиньи (1) в области указанной генитальной области (4) посредством аппарата (7) для проецирования шаблонов.
3. Устройство по п. 1, отличающееся тем, что камера (2) с восприятием глубины сцены выполнена в виде времяпролетной камеры.
4. Устройство по п. 1, отличающееся тем, что камера с восприятием глубины сцены представляет собой первую камеру (2.1), и область захвата камеры с восприятием глубины сцены представляет собой область (3.1) захвата первой камеры с восприятием глубины сцены, и при этом устройство содержит вторую камеру (2.2) с восприятием глубины сцены, имеющую область (3.2) захвата второй камеры с восприятием глубины сцены, и причем генитальная область (4) убойной свиньи (1) может быть захвачена на виде задней части туши в области (3.1) захвата первой камеры с восприятием глубины сцены, и причем генитальная область (4) убойной свиньи (1) может быть захвачена на виде брюха в области (3.2) захвата второй камеры с восприятием глубины сцены.
5. Устройство по п. 2, отличающееся тем, что камера с восприятием глубины сцены представляет собой первую камеру (2.1), и область захвата камеры с восприятием глубины сцены представляет собой область (3.1) захвата первой камеры с восприятием глубины сцены, и при этом устройство содержит вторую камеру (2.2) с восприятием глубины сцены, имеющую область (3.2) захвата второй камеры с восприятием глубины сцены, и причем генитальная область (4) убойной свиньи (1) может быть захвачена на виде задней части туши в области (3.1) захвата первой камеры с восприятием глубины сцены, и причем генитальная область (4) убойной свиньи (1) может быть захвачена на виде брюха в области (3.2) захвата второй камеры с восприятием глубины сцены.
6. Устройство по п. 3, отличающееся тем, что камера с восприятием глубины сцены представляет собой первую камеру (2.1), и область захвата камеры с восприятием глубины сцены представляет собой область (3.1) захвата первой камеры с восприятием глубины сцены, и при этом устройство содержит вторую камеру (2.2) с восприятием глубины сцены, имеющую область (3.2) захвата второй камеры с восприятием глубины сцены, и причем генитальная область (4) убойной свиньи (1) может быть захвачена на виде задней части туши в области (3.1) захвата первой камеры с восприятием глубины сцены, и причем генитальная область (4) убойной свиньи (1) может быть захвачена на виде брюха в области (3.2) захвата второй камеры с восприятием глубины сцены.
7. Устройство по любому из предыдущих пунктов, отличающееся тем, что устройство содержит фотокамеру, имеющую область захвата фотокамеры, в которой могут быть захвачены значения освещенности пикселей на поверхности убойной свиньи (1) в области указанной генитальной области (4), и при этом фотокамера соединена с анализирующим блоком (6) и может быть размещена посредством позиционирующего устройства (5) относительно камеры (2) с восприятием глубины сцены таким образом, чтобы область захвата фотокамеры и область (3) захвата камеры с восприятием глубины сцены по меньшей мере частично перекрывали друг друга в общей области захвата.
| US 20130322699 A1, 05.12.2013 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПРЕДОСТАВЛЕНИЯ ИНФОРМАЦИИ О ЖИВОТНЫХ ПРИ ИХ ПРОХОЖДЕНИИ ЧЕРЕЗ ПРОХОД ДЛЯ ЖИВОТНЫХ | 2008 |
|
RU2469530C2 |

