Настоящее изобретение относится к летательному аппарату, выполненному с возможностью вертикального взлета, подобному, например, квадрокоптеру.
В ряде применений желательно иметь в распоряжении летательный аппарат, который выполнен с возможностью взлета с поверхности минимального размера и использование которого, соответственно, не требует, например, наличия какого-либо специального аэропорта с большой площадью. Дополнительно, в некоторых случаях применения необходим маневренный летательный аппарат, который выполнен с возможностью точного управления и, предпочтительно, с возможностью зависания на месте и при этом обладает хорошими параметрами для зависания.
Например, для текущего контроля с воздуха и разведки используются летательные аппараты, выполненные с возможностью зависания над неопознанной целью и при этом с возможностью записи изображений с воздуха. В альтернативном случае применения летательный аппарат, выполненный с возможностью вертикального взлета, иногда также называемый самолетом ВВП (Вертикального Взлета и Посадки) может использоваться в полетах над территориями с затрудненными для проживания людей условиями или для доступа к другому оборудованию, например, в условиях вмешательства при чрезвычайной ситуации, например, для обеспечения доставки на эти территории таких предметов, как инструменты, продовольствие или медикаменты.
Для таких целей, в числе прочего, были разработаны летательные аппараты, содержащие четыре или более несущих винтов, оснащенных пропеллером и двигателем, обеспечивающим приведения указанного пропеллера во вращение, при этом каждый из указанных несущих винтов обеспечивает создание по существу направленной вверх вертикальной движущей силы, соответственно, для вертикального подъема или зависания летательного аппарата. Такой летательный аппарат, оснащенный четырьмя такими несущими винтами, также может представлять собой квадкоптер, квадрокоптер, квадрикоптер, квадротор или летающую платформу. В целом, такие летательные аппараты, которые содержат более трех основных винтов, относятся к мультикоптерам, включая стандартные варианты, помимо квадрокоптеров, а именно содержащие три несущих винта (трикоптер), шесть несущих винтов (гексакоптер) или восемь несущих винтов (октокоптер). Такие летательные аппараты обычно работают в беспилотном режиме и, соответственно, могут быть небольшими. В некоторых случаях такие летательные аппараты также называют дронами.
Для обеспечения незначительного наклона всего летательного аппарата или одного или нескольких несущих винтов относительно горизонтальной плоскости, такой летательный аппарат также может быть оснащен каким-либо передним приводом, поскольку движущая сила, создаваемая несущими винтами, наклонена относительно вертикали. Однако, скорости полета, которые могут развиваться в таком случае, ограничены и являются относительно низкими, составляя обычно менее 200 км/ч, зачастую даже менее 100 км/ч, вследствие физических граничных условий, существующих в летательных аппаратах данного типа. Такие ограничения скорости вызваны, например, такими физическими граничными условиями: пропеллер, создающий движущую силу, работает на больших скоростях вращения, соответственно, лопасть пропеллера, перемещающаяся вперед в направлении полета самолета, уже при относительно низких скоростях полета будет вращаться практически со скоростью звука, по меньшей мере, на своих концевых частях, создавая, таким образом, большое сопротивление воздуха и сильные шумы.
Таким образом, современные мультикоптеры обладают хорошими параметрами зависания - аналогично вертолетам, в которых только один несущий винт обеспечивает необходимую движущую силу, при этом сложный механизм несущего винта может быть использован в сочетании с задним винтом для маневрирования вертолета - но при этом обычно развиваются относительно низкие скорости перемещения при полете.
В документе KR 1020120060590 А описан квадрокоптер, который выполнен с возможностью вертикального взлета и посадки и в котором обеспечена возможность изменения направления движущей силы, создаваемой пропеллерами, для обеспечения возможности перемещения квадрокоптера не только вверх, но и вперед.
С учетом приведенного предшествующего уровня техники цель настоящего изобретения заключается в создании летательного аппарата, который обладает хорошими характеристиками для зависания и также способен развивать высокие скорости перемещения при полете.
Указанная цель достигается благодаря созданию летательного аппарата, обладающего признаками, указанными в пункте 1 формулы изобретения. Приведенные в качестве примера варианты выполнения отражены в зависимых пунктах формулы изобретения и в следующем описании.
В соответствии с настоящим изобретением предложен летательный аппарат, содержащий опорную конструкцию, которая содержит по меньшей мере один центральный часть фюзеляж и два пилона, каждый из которых расположен сбоку на расстоянии от указанного фюзеляжа. Дополнительно, указанный летательный аппарат содержит узел крыла, по меньшей мере четыре несущих винта и по меньшей мере один движитель. Каждый из указанных несущих винтов прикреплен к опорной конструкции, имеет пропеллер с двумя лопастями и обеспечивает создание направленной вверх движущей силы, действующей на летательный аппарат в вертикальном направлении во время вращения пропеллера. Указанный движитель выполнен с возможностью создания движущей силы, действующей в горизонтальном направлении на указанную опорную конструкцию. Каждый из указанных пилонов содержит по меньшей мере два несущих винта, которые обеспечивают остановку соответствующих лопастей пропеллера несущего винта в определенном положении относительно указанных пилонов. В остановленном положении лопасти пропеллера несущего винта не выступают за наружные габариты пилонов.
Настоящее изобретение основано на идее создания летательного аппарата, содержащего несущие винты, обеспечивающие создание вертикально направленной движущей силы, под действием которой обеспечивается возможность вертикального взлета и посадки летательного аппарата, а также возможность зависания, и, дополнительно, с другой стороны, на идее обеспечения тягового движителя, предназначенного для создания движущей силы, действующей в горизонтальном направлении, благодаря чему независимо от работы несущих винтов обеспечивается возможность увеличения скорости летательного аппарата до развития им высокой скорости перемещения при полете после остановки несущих винтов. Для того, чтобы получить оптимальную с точки зрения аэродинамики форму в то время, когда несущие винты остановлены, лопасти пропеллеров несущих винтов размещены в конструкции летательного аппарата, например, в пилонах, благодаря чему обеспечивается минимальное сопротивление воздуха во время выполнения полета.
Указанный пропеллер несущего винта летательного аппарата имеет исключительно две лопасти. Такой пропеллер, с одной стороны, обладает высоким коэффициентом полезного действия, а с другой стороны, имеет незначительную разбалансировку. Кроме этого, использование в настоящем летательном аппарате таких пропеллеров, которые имеют две лопасти, является особенно предпочтительным, потому что во время полета обеспечивается возможность их остановки в таком положении вращения, в котором указанный пропеллер расположен параллельно направлению полета. В таком положении вращения остановленный пропеллер создает минимальное сопротивление воздуха.
В несущих винтах летательного аппарата обеспечена возможность остановки соответствующих лопастей в определенном положении вращения. Такая остановка лопастей может быть особенно преимущественной при перемещении летательного аппарата в горизонтальной плоскости с большой скоростью перемещения при полете под действием движущей силы, при этом аэродинамические поверхности в узле крыла создают значительную динамическую подъемную силу, таким образом, не требуется создания несущими винтами какой-либо дополнительной подъемной силы. В такой полетной ситуации преимущественно остановить лопасти пропеллера несущих винтов в таком положении вращения, при котором, с одной стороны, во время выполнения полета они создают минимально возможное сопротивление воздуха, и, с другой стороны, силы, действующие в горизонтальном и/или вертикальном направлении на лопасти пропеллеров и создаваемые протекающим вдоль них воздухом, являются по возможности минимальными.
Для того, чтобы дополнительно уменьшить сопротивление воздуха лопастей несущего винта во время выполнения полета, несущие винты расположены в опорной конструкции летательного аппарата, а именно в пилонах, таким образом, в остановленном положении лопасти несущих винтов не выступают за наружные габариты указанных пилонов. В результате, в остановленном положении пилоны вместе с лопастями пропеллеров образуют оптимизированную аэродинамическую форму.
Предпочтительно, пропеллеры расположены в пилонах таким образом, что они окружены пилонами по меньшей мере с двух противоположных сторон. Указанные пилоны предпочтительно выполнены с возможностью размещения в них лопастей пропеллера. В результате, в остановленном положении лопасти пропеллера проходят в продольном направлении относительно указанных пилонов, не выступая за их габариты.
Предпочтительно, пилоны имеют отверстия, открытые с обеих сторон, которые проходят перпендикулярно продольному направлению пилонов, при этом в указанных отверстиях размещены пропеллеры несущих винтов. Предпочтительно, указанные отверстия образуют непрерывное отверстие в пилоне, которое проходит перпендикулярно продольному направлению пилонов. Другими словами, в области несущих винтов, в направлении, перпендикулярном продольному направлению пилонов, указанные пилоны имеют отверстия, которые проходят через всю их ширину. Указанные отверстия также могут представлять собой пазы. Достаточным является такой размер отверстий или пазов, который обеспечивает возможность свободного вращения лопастей несущего винта. Ось вращения пропеллеров при этом проходит наиболее близко к продольной оси пилонов в продольном направлении. Таким образом, в неостановленном положении обеспечивается возможность создания несущими винтами необходимой вертикальной движущей силы. Во время полета обеспечивается возможность остановки пропеллеров несущих винтов и, благодаря расположению несущих винтов в пилонах летательного аппарата в продольном направлении пилонов обеспечивается оптимальное с точки зрения аэродинамики положение. При этом пропеллеры несущих винтов создают во время полета минимально возможное сопротивление.
Предпочтительно, для каждого из пропеллеров несущих винтов в пилонах имеется соответствующее отверстие. Для получения наиболее оптимальной с точки зрения аэродинамики поверхности пилоны предпочтительно имеют отверстия или пазы для пропеллеров, выполненные исключительно в области расположения несущих винтов. В альтернативном варианте выполнения отверстие в продольном направлении пилонов может иметь больший размер, обеспечивая возможность расположения по меньшей мере одного несущего винта последовательно или один над другими внутри указанного отверстия. В данном случае, по статическим причинам, в некоторых частях отверстий могут быть выполнены стабилизирующие распорки или области между отдельными несущими винтами.
Предпочтительно, указанные пилоны содержат по меньшей мере одно уплотнительное средство, которое закрывает проходы по бокам, когда лопасти пропеллера остановлены. Чтобы дополнительно уменьшить сопротивление воздуха от пропеллеров в пилонах, отверстия в пилонах могут закрываться, обеспечивая оптимальную в аэродинамическом смысле, практически гладкую поверхность пилонов. Для того, чтобы закрыть проходы в области несущих винтов, когда лопасти пропеллеров находятся в остановленном положении, пилоны снабжены уплотнительным средством, обеспечивающим закрытие указанных отверстий.
Предпочтительно, уплотнительное средство выполнено в виде одной или нескольких частей. Уплотнительное средство для закрывания каждого из отверстий в пилонах может быть выполнено из одной или нескольких частей. В данном случае, уплотнительное средство может иметь практически любую подходящую форму для закрывания отверстий в пилонах для получения наиболее оптимальной из возможных аэродинамических форм. Предпочтительно, уплотнительное средство имеет форму, соответствующую контуру пилонов в области, в которой выполнены отверстия для пропеллеров несущих винтов. Уплотнительное средство выполнено с возможностью закрывания отверстий сбоку, снизу, сверху, снаружи или изнутри указанных пилонов. Если уплотнительное средство является составным, оно может быть симметричным или несимметричным. Уплотнительное средство может быть выполнено в форме уплотнительного щитка, состоящего из одной или нескольких частей, в форме свертывающихся жалюзи или щитка, состоящего из одной или нескольких частей, либо иметь любую другую подходящую форму.
Предпочтительно, узел крыла прикреплен к опорной конструкции и выполнен с возможностью создания подъемной силы для летательного аппарата во время его горизонтального перемещения. Для этого узел крыла имеет по меньшей мере одну аэродинамическую поверхность, имеющую профиль, обеспечивающий создание динамической подъемной силы.
Аэродинамическая поверхность или поверхности узла крыла предпочтительно имеют размеры, благодаря которым при скоростях, развиваемых летательным аппаратом во время перемещения при полете, обеспечивается необходимая подъемная сила для летательного аппарата, таким образом при скорости перемещения во время полета создание подъемной силы обеспечивается без применения несущих винтов.
Летательный аппарат, выполненный в соответствии с изобретением, оснащен комбинацией по меньшей мере из четырех несущих винтов и по меньшей мере одним движителем, а также соответствующим узлом крыла, и может демонстрировать требуемые хорошие параметры зависания и также выполнен с возможностью достижения высоких скоростей перемещения при полете. Так, например, во время взлета или посадки или во время зависания, то есть при нулевой или несущественной горизонтальной скорости несущие винты обеспечивают создание необходимой подъемной силы. Независимо от несущих винтов, движитель обеспечивает увеличение скорости летательного аппарата при перемещении в горизонтальном направлении и, при достаточно высоких горизонтальных скоростях, динамическая подъемная сила, созданная по меньшей мере одной аэродинамической поверхностью узла крыла, может быть достаточно большой для удерживания летательного аппарата.
Отдельные элементы заявленного летательного аппарата могут быть достаточно легко изготовлены и отрегулированы.
Предпочтительно, указанные пилоны присоединены к центральному фюзеляжу с помощью по меньшей мере одного узла крыла. В предпочтительном варианте выполнения опорная конструкция вместе с узлом крыла выполнена в виде так называемого тримарана, содержащего центральный фюзеляж. Такая опорная конструкция типа «тримаран» содержит по меньшей мере один продолговатый центральный фюзеляж, по бокам которого расположены соответствующие боковые фюзеляжи, так называемые пилоны; то есть по меньшей мере к одному центральному фюзеляжу с обеих сторон примыкает по меньшей мере один соответствующий пилон. Пилоны присоединены к центральному фюзеляжу с помощью узла крыла и/или по меньшей мере одной части опорной конструкции. Дополнительно или в качестве альтернативы пилоны могут быть присоединены к центральному фюзеляжу с помощью дополнительных элементов опорной конструкции. Эти дополнительные элементы также могут дополнительно способствовать созданию подъемной силы. В данном случае центральный фюзеляж также может быть выполнен из нескольких расположенных по центру фюзеляжей, присоединенных друг к другу и расположенных по бокам друг от друга.
Предпочтительно, указанные пилоны расположены на расстоянии от центрального фюзеляжа летательного аппарата, по меньшей мере достаточном для обеспечения соответствующего пространства для пропеллеров несущих винтов. Расстояние между пилонами и фюзеляжем, соответственно, по меньшей мере равно длине лопасти пропеллера.
Каждый из указанных пилонов может содержать, например, два несущих винта. Например, соответствующий двигатель для несущего винта может быть размещен в пилоне. Пилон может иметь форму, обеспечивающую протекание воздуха в потоке, создаваемом несущим винтом, и/или в потоке воздуха, создаваемом во время перемещения при полете. В соответствии с другим вариантом выполнения два пропеллера, расположенные один над другим, также могут быть использованы по одному каждом несущем винте. Предпочтительно, пропеллеры вращаются в противоположных направлениях. Отдельные пропеллеры могут быть расположены вместе в общем пазу или каждый по отдельности в соответствующем отдельном пазу. Предпочтительно, ось вращения двух пропеллеров расположена на одной оси симметрии, то есть пропеллеры расположены непосредственно один над другим и перекрывают друг друга. По статическим причинам пропеллеры могу иметь строго определенный максимальный диаметр. Для обеспечения возможности увеличения тяги несущих винтов могут быть использованы вышеописанные сдвоенные пропеллеры. Благодаря такой конфигурации с противоположным вращением пропеллеров, турбулентность воздуха, создаваемая первым пропеллером, оказывает положительное влияние на подъемную силу второго пропеллера, и таким образом способствует некоторому увеличению тяги сдвоенного пропеллера по сравнению с одинарным пропеллером. Расстояние между двумя пропеллерами в вертикальном направлении составляет не более 15% от величины диаметра указанных пропеллеров. Увеличение тяги, например, по сравнению с одинарным пропеллером, имеющим коэффициент полезного действия 80%, обеспечивает увеличение коэффициента полезного действия до приблизительно 85% для сдвоенного пропеллера.
В частности, на аэродинамической поверхности может быть расположен рулевой механизм или руль. Благодаря такому управляющему механизму или рулю обеспечивается возможность соответствующего регулирования подъемной силы, создаваемой опорной конструкцией типа «тримаран», например, при увеличении скорости перемещения во время полета, а также при последующем уменьшении числа оборотов несущих винтов.
Заявленный летательный аппарат имеет опорную конструкцию и узел крыла. В данном случае опорная конструкция обеспечивает структурную прочность летательного аппарата для надежного прикрепления узла крыла и несущих винтов к летательному аппарату. Узел крыла предназначен для обеспечения динамической подъемной силы посредством аэродинамических поверхностей соответствующей формы, когда летательный аппарат развивает достаточно высокие скорости перемещения при полете.
Следует отметить, что использование двух разных терминов для опорной конструкции и узла крыла не означает, что функции, выполняемые опорной конструкцией и узлом крыла, обязательно должны выполняться посредством отдельных конструкций. Например, функции опорной конструкции и функции узла крыла могут быть выполнены различными структурными элементами предложенного летательного аппарата или одними и теми же элементами летательного аппарата. Например, крыло летательного аппарата может действовать в качестве аэродинамической поверхности, создающей динамическую подъемную силу, т.е. действовать в качестве части узла крыла, а также обеспечивать механическое соединение других элементов летательного аппарата друг с другом, т.е. действовать в качестве части опорной конструкции. Например, крыло может иметь наружную обшивку, которая определяет профиль образуемой ею аэродинамической поверхности, и поэтому является частью узла крыла. В то же время, крыло может иметь внутренние элементы, например, распорки, которые обеспечивают механическую прочность, к которым, например, прикреплена обшивка крыла, так что они могут действовать в качестве опорной конструкции.
Предпочтительно, несущие винты выполнены таким образом, что плоскость вращения лопастей несущего винта является неподвижной относительно оси ротора несущего винта, приводимого во вращение двигателем. Другими словами, несущие винты летательного аппарата могут иметь простую механическую конструкцию и, например, простой пропеллер может быть прикреплен непосредственно к оси ротора, приводимой во вращение двигателем. В частности, нет необходимости присоединять лопасти несущего винта к оси, приводимой во вращение двигателем, используя при этом сложный механизм, например, автомат перекоса, как в вертолете. В частности, нет необходимости изменять угол установки или угол наклона отдельных лопастей винта во время его вращения для того, чтобы также обеспечить перемещение вперед летательного аппарата, или вращение, наклон или движение рысканья летательного аппарата. Вместо этого, в предложенном летательном аппарате перемещение вперед может быть обеспечено благодаря использованию дополнительного движителя. Вращение, наклон или рысканье летательного аппарата могут осуществляться путем изменения движущих сил, создаваемых каждым из (как правило, по меньшей мере четырех) несущих винтов.
Предпочтительно, лопасти пропеллера несущего винта жестко прикреплены к оси винта. Пропеллер, оснащенный жесткими лопастями, не имеет каких-либо подвижных частей. Соответственно, он является жестким, и, например, не требует использования какого-либо механизма или контроллера для обеспечения возможности управления изменяемой конфигурацией лопастей пропеллера. В частности, пропеллер может иметь конструкцию, состоящую из одной части. Подъемная сила, создаваемая несущим винтом, имеющим простую конструкцию, зависит, в основном, от скорости вращения, развиваемой пропеллером, и поэтому обеспечивается возможность простого управления подъемной силой путем соответствующего управления приводным двигателем.
Предпочтительно, лопасти пропеллера указанного движителя присоединены с возможностью вращения к оси винта так, что обеспечивается возможность изменения угла их наклона. Другими словами, угол наклона лопастей пропеллера к плоскости их вращения может быть изменен. Такое изменение угла наклона лопастей пропеллера предпочтительно может осуществляться одновременно для всех лопастей пропеллера. В частности, изменение угла наклона лопастей пропеллера может быть выполнено независимо от текущего положения указанных лопастей при вращении, то есть угол их наклона не изменяется во время вращения, как в случае использования автомата перекоса в вертолете; предпочтительно, чтобы угол наклона лопастей пропеллера оставался в целом постоянным во время вращения. Такое относительно медленное изменение угла наклона лопастей пропеллера может быть легко обеспечено и в случае использования жесткой конструкции.
При изменении угла наклона лопастей пропеллера обеспечивается возможность регулирования тяги указанного движителя и, соответственно, обеспечиваемой ею движущей силы, направленной вперед, без необходимости изменения скорости вращения пропеллера. Такой толкающий пропеллер, снабженный лопастями, выполненными с возможностью одновременного поворота, также относится к пропеллеру с изменяемым углом наклона.
Движитель может представлять собой, например, тянущий привод или толкающий привод. Если точнее, пропеллер движителя представляет собой тянущий или толкающий пропеллер. При использовании тянущего пропеллера такой пропеллер тянет летательный аппарат, то есть способствует его перемещению в направлении полета, при это указанный пропеллер расположен на передней стороне фюзеляжа, пилонов, аэродинамических поверхностей или на передней стороне руля высоты. Толкающий пропеллер расположен на задней стороне летательного аппарата относительно направления полета, то есть, например, на задней стороне фюзеляжа, пилонов, аэродинамических поверхностей и т.д.
Предпочтительно, несущие винты и движитель выполнены с возможностью приведения в действие посредством двигателей, которые выполнены с возможностью управления независимо друг от друга. Для того, чтобы обеспечить поворот летательного аппарата вокруг его вертикальной оси, то есть обеспечить движение рысканья, преимущественно, необходимо оборудовать данный летательный аппарат по меньшей мере четырьмя несущими винтами, аналогично конструкции квадрокоптера. Четыре несущих винта предпочтительно выполнены с возможностью управления независимо друг от друга. Поскольку положение или наклон летательного аппарата обеспечиваются тягой, обеспечиваемой посредством по меньшей мере трех несущих винтов, наличие дополнительного четвертого несущего винта обеспечивает возможность выполнения летательным аппаратом движения рысканья. Таким образом, путем соответствующего управления четырьмя несущими винтами обеспечивается возможность приведения летательного аппарата в любое требуемое положение и задания направления полета. В таком летательном аппарате, содержащем четыре или более несущих винтов, в дополнение к обеспеченным в нем хорошим параметрам зависания, также обеспечивается возможность точного и быстрого маневрирования.
Благодаря использованию таких двигателей, которые выполнены с возможность раздельного управления, в летательном аппарате обеспечивается возможность независимого управления, с одной стороны, подъемной силой, создаваемой несущими винтами, и, с другой стороны, направленной вперед движущей силой, создаваемой движителем. В частности, обеспечивается возможность управления вращением или рысканьем летательного аппарата, выполняемым посредством несущих винтов, без изменения направленной вперед по горизонтали движущей силы, создаваемой указанным движителем. При этом, так как скорость перемещения при полете возрастает, обеспечена возможность соответствующего управления несущими винтами для создания меньшей подъемной силы, т.к. необходимо учитывать динамическую подъемную силу, создаваемую аэродинамической поверхностью узла крыла.
Предпочтительно, каждый несущий винт выполнен с возможностью приведения в движение посредством электродвигателя. В виду возможности быстрого и точного управления скоростью вращения электродвигателей обеспечивается возможность быстрого и точного изменения подъемной силы, создаваемой несущим винтом, для выполнения или управления отдельными движениями летательного аппарата во время полета. В частности, для летательного аппарата, подобного мультикоптеру, точное и быстрое управление вертикально направленными движущими силами, создаваемыми отдельными несущими винтами, может быть важным для безопасности, устойчивости и, при необходимости, для обеспечения параметров маневрирования при полете.
Предпочтительно, движитель выполнен с возможностью приведения в действие двигателем внутреннего сгорания, присоединенным к генератору для выработки электроэнергии для подачи к электродвигателям несущих винтов.
В таком летательном аппарате, оснащенном приводом гибридного типа, движущая сила, действующая в горизонтальном направлении, может создаваться двигателем внутреннего сгорания указанного движителя. В данном случае, двигатель внутреннего сгорания может представлять собой поршневой двигатель или реактивный двигатель и т.п. Топливо для таких двигателей внутреннего сгорания в достаточном количестве может доставляться на летательный аппарат, обеспечивая возможность работы движителя в течение продолжительного периода времени, и, соответственно, возможность выполнения летательным аппаратом полета в течение более продолжительного времени с определенной скоростью перемещения при полете, например, для того, чтобы достичь удаленную цель. В отличие от движителя, несущие винты предпочтительно выполнены с возможностью приведения в действие посредством электродвигателей для того, чтобы обеспечить такое преимущество, как возможность более простого и более точного управления по сравнению с двигателем внутреннего сгорания во время зависания или во время взлета или посадки. Электроэнергия для указанных электродвигателей моторов может обеспечиваться генератором, соединенным с двигателем внутреннего сгорания, при этом электроэнергия может подаваться непосредственно от генератора к электродвигателям или предварительно может быть накоплена в накопителе, например, в батарее, и затем подаваться к электродвигателям по мере необходимости. Движитель может иметь непосредственный механический или косвенный привод для питания от генератора.
В альтернативном варианте выполнения движитель также может быть выполнен с возможностью приведения в действие электродвигателем, при этом электроэнергия для работы электродвигателей поступает от батареи или генератора. Батарея или аккумулятор может представлять собой, например, аккумуляторный элемент, выполненный с возможностью зарядки солнечной энергией, размещенный на аэродинамических поверхностях и/или на фюзеляже. Генератор может быть выполнен с возможностью приведения в действие, например, двигателем внутреннего сгорания и с возможностью обеспечения электроэнергии для приведения в действие электродвигателей. В качестве альтернативы может использоваться любой другой тип генератора для обеспечения электроэнергии для работы электродвигателей.
На чертежах в целом одинаковыми номерами позиций обозначены одинаковые элементы на различных видах. Чертежи не обязательно выполнены в масштабе; в целом, чертежи приведены для иллюстрирования принципов настоящего изобретения. В следующем описании приведены различные варианты выполнения изобретения со ссылкой на приложенные чертежи.
Фиг. 1 изображает конкретный вариант выполнения летательного аппарата;
Фиг. 2 изображает другой вариант выполнения летательного аппарата;
Фиг. 3 изображает вид сбоку варианта выполнения летательного аппарата, показанного на Фиг. 2;
Фиг. 4 изображает вид спереди летательного аппарата в соответствии с вариантом выполнения, показанным на Фиг. 2;
Фиг. 5 изображает в разрезе пилоны с пропеллером в неостановленном положении; и
Фиг. 6 изображает в разрезе пилоны с пропеллером в остановленном положении.
Следующее подробное описание содержит ссылки на сопроводительные чертежи, которые изображают отдельные детали и конкретные варианты выполнения и осуществления настоящего изобретения.
Здесь и далее слово «примерный» используется в значении «служащий в качестве примера, случая или иллюстрации». Каждый конкретный вариант выполнения или осуществления, обозначенный здесь как «примерный», не обязательно должен трактоваться как предпочтительный или наиболее преимущественный по отношению к другим конкретным вариантам выполнения или осуществления.
В следующем подробном описании присутствуют ссылки на сопроводительные чертежи, составляющие часть настоящего описания, на которых проиллюстрированы отельные варианты выполнения, в соответствии с которыми настоящее изобретение может быть реализовано. В этом отношении термины, обозначающие направление, например, слова «выше», «ниже», «спереди», «сзади», «передний», «задний» и т.д. указывают на ориентацию описываемого чертежа (чертежей). Поскольку элементы примерных вариантов выполнения могут быть расположены в различных направлениях, терминология, указывающая на направления, использована для иллюстративности и не является ограничительной. Следует понимать, что могут быть осуществлены и другие определенные варианты выполнения и могут быть произведены структурные или логические видоизменения в пределах объема правовой охраны настоящего изобретения. Следует понимать, что признаки различных примерных вариантов выполнения, приведенных в данном описании, могут быть объединены вместе, если иное не указано. Таким образом, следующее подробное описание не следует трактовать в ограничительном смысле, при этом объем правовой охраны изобретения определен прилагаемой формулой изобретения.
В тексте представленного описания слова «присоединен», «соединен» использованы для описания прямого и непрямого соединения, а также прямого или непрямого сопряжения. На чертежах одинаковые или подобные элементы при необходимости обозначены одинаковыми номерами позиций.
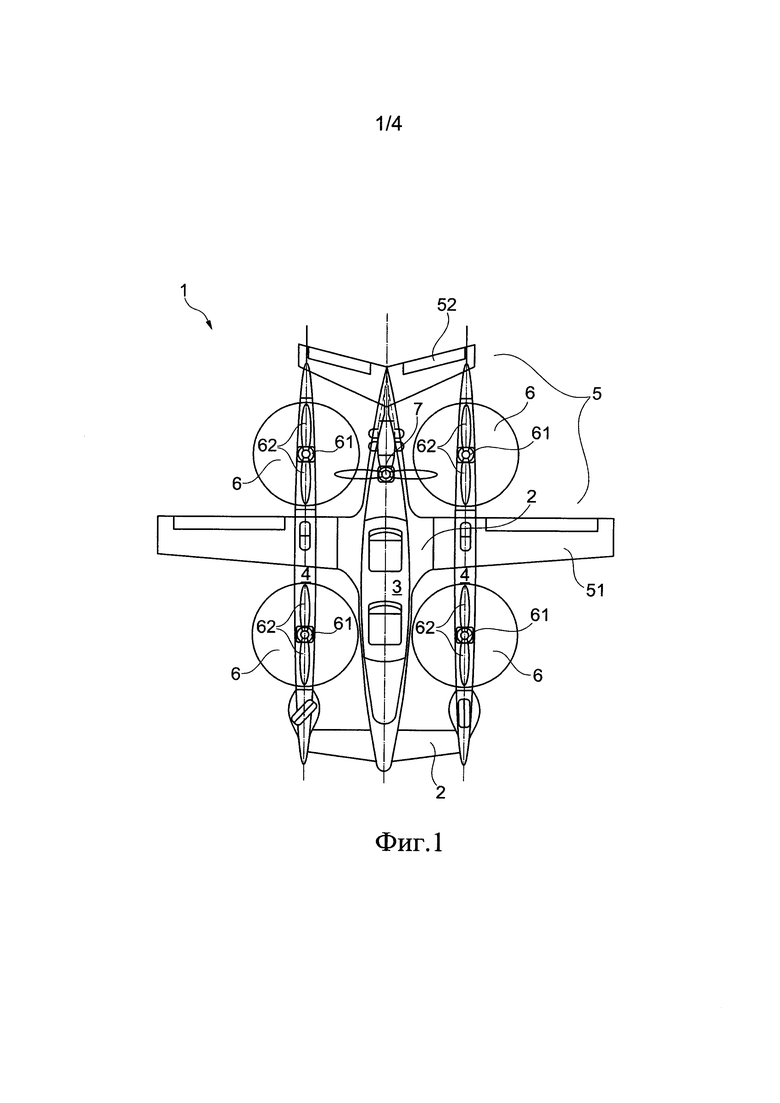
Фиг. 1 изображает конкретный вариант выполнения летательного аппарата 1 в соответствии с заявленным изобретением. Летательный аппарат 1 содержит опорную конструкцию 2. Опорная конструкция 2 содержит центральный фюзеляж 3 и два пилона 4, каждый из которых расположен сбоку на расстоянии от фюзеляжа 3. Дополнительно летательный аппарат 1 содержит узел 5 крыла, который согласно изображенному варианту выполнения летательного аппарата 1 содержит основное несущее крыло 51 и поворотный руль 52 высоты. В проиллюстрированном варианте выполнения летательный аппарат 1 содержит несущие винты 6 и движитель 7. Каждый из несущих винтов 6 прикреплен к опорной конструкции 2 летательного аппарата 1. Каждый несущий винт 6 содержит пропеллер 61, имеющий две лопасти 62. Несущие винты 6 предназначены для создания, по мере вращения пропеллера 61, подъемной силы, действующей в вертикальном направлении относительно летательного аппарата 1. Движитель 7 летательного аппарата 1 выполнен с возможностью создания движущей силы, действующей на опорную конструкцию 2 в горизонтальном направлении. Каждый из пилонов 4 летательного аппарата 1 содержит два несущих винта 6, которые выполнены с возможностью остановки соответствующих лопастей 62 пропеллера несущего винта 6 в определенном положении относительно пилонов 4. В остановленном положении лопасти 62 несущих винтов 6 не выступают за наружные габариты пилонов 4. На Фиг. 5 и 6 подробно изображены пропеллеры 61 в остановленном и неостановленном положениях.
Во варианте выполнения, изображенном на Фиг. 1, лопасти 62 несущих винтов показаны в остановленном положении или в положении, соответствующем остановленному. Круг, описываемый лопастями 62 несущего винта при вращении, изображен на Фиг. 1 в виде окружности. Таким образом, можно увидеть, что расстояние от пилонов 4 до центрального фюзеляжа 3 аппарата 1 равно по меньшей мере радиусу указанной окружности, то есть длине лопасти 62 несущего винта.
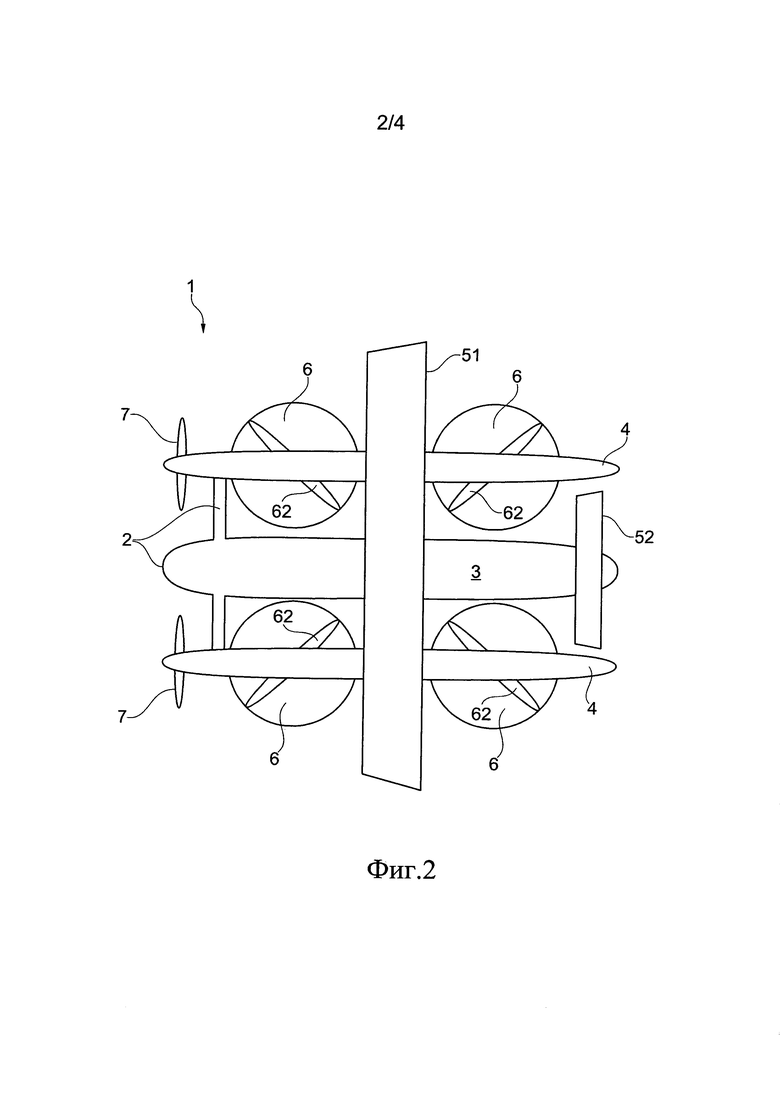
Фиг. 2 изображает другой вариант выполнения летательного аппарата 1. Летательный аппарат 1, показанный на Фиг. 2, отличается от аппарата 1, показанного на Фиг. 1, в частности, тем, что аппарат 1 на Фиг. 2 содержит два движителя 7, расположенные на передней стороне пилонов 4. В остальном конструкция летательного аппарата 1 на Фиг. 2 в целом соответствует летательному аппарату 1 на Фиг. 1. Летательный аппарат 1 содержит опорную конструкцию 2, которая содержит центральный фюзеляж 3 и два пилона 4, каждый из которых расположен сбоку на расстоянии от фюзеляжа 3. Дополнительно, аппарат 1 содержит узел 5 крыла, который в соответствии с изображенным вариантом выполнения аппарата 1 содержит главное несущее крыло 51 и руль 52 высоты. В изображенном варианте выполнения аппарат 1 содержит четыре несущих винта 6 и два движителя 7. Каждый из четырех несущих винтов 6 прикреплен к опорной конструкции 2 аппарата 1. Каждый из несущих винтов 6 содержит пропеллер 61, имеющий две лопасти 62. Каждый пилон 4 летательного аппарата 1 содержит два несущих винта 6.
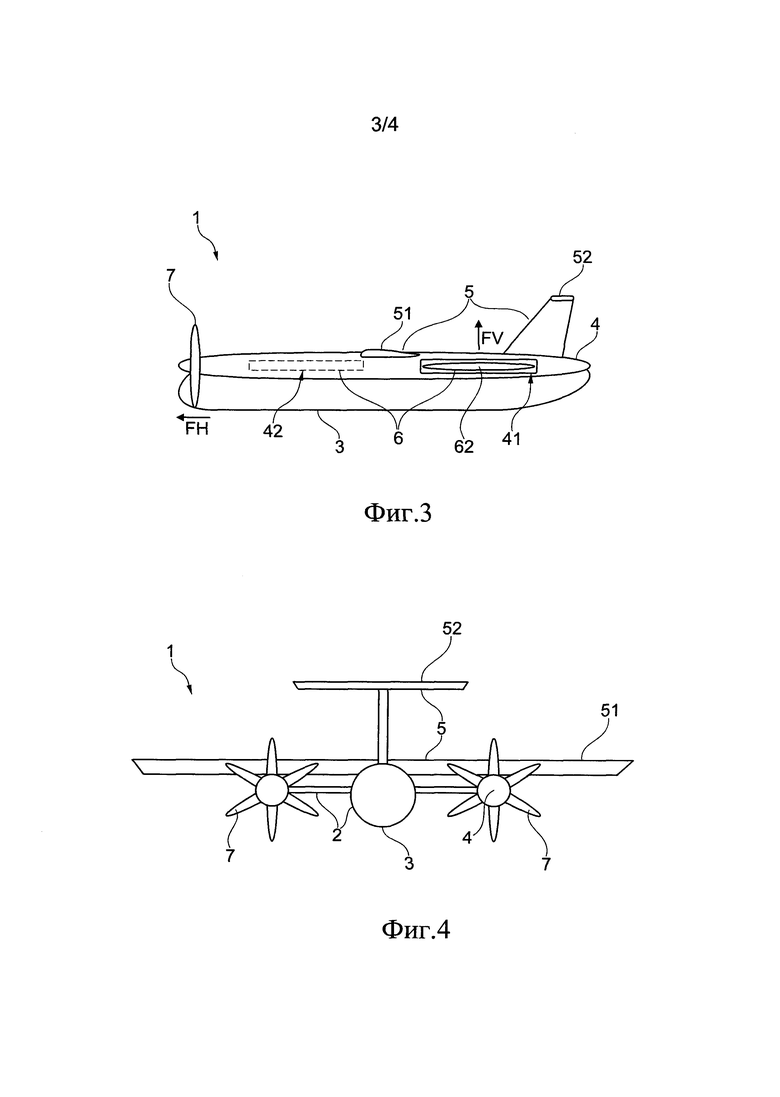
Фиг. 3 изображает вид сбоку летательного аппарата в соответствии с вариантом выполнения, показанным на Фиг. 2. В летательном аппарате 1, показанном на Фиг. 3, два несущих винта 6 изображены в остановленном положении. В несущем винте 6, установленном спереди относительно направления полета, отверстие 41 в пилонах 4 закрыто уплотнительным средством 42, например, уплотнительным щитком. Отверстие 41 заднего несущего винта 6 относительно направления полета открыто. В остановленном положении лопасти 62 пропеллеров несущих винтов 6 расположены внутри пилонов 4 и не выступают за габариты пилонов 4. Сопротивление воздуха на лопастях 62 пропеллера уменьшено благодаря их расположению внутри пилонов 4 в остановленном положении. Сопротивление воздуха может быть дополнительно уменьшено с помощью уплотнительного средства 42, поскольку оно окружает пилоны 4 снаружи, образуя оптимальную аэродинамическую форму. Благодаря уплотнительному средству 42, когда несущие винты 6 остановлены, пилоны 4 имеют оптимальную аэродинамическую форму. Уплотнительное средство 42 может иметь конструкцию, состоящую из одной или нескольких частей. Уплотнительное средство 42 может располагаться целиком или частично внутри пилонов 4 или целиком или частично снаружи пилонов, когда отверстие 41 открыто. Конкретный вариант выполнения уплотнительного средства 42 подробно изображен на Фиг. 5 и 6.
Фиг. 4 изображает вид спереди летательного аппарата 1 согласно варианту выполнения, показанному на Фиг. 2. Во варианте выполнения, показанном на Фиг. 4, пропеллеры движителя 7 имеют шесть лопастей. Однако, движитель 7 может при необходимости быть снабжен пропеллером другого типа.
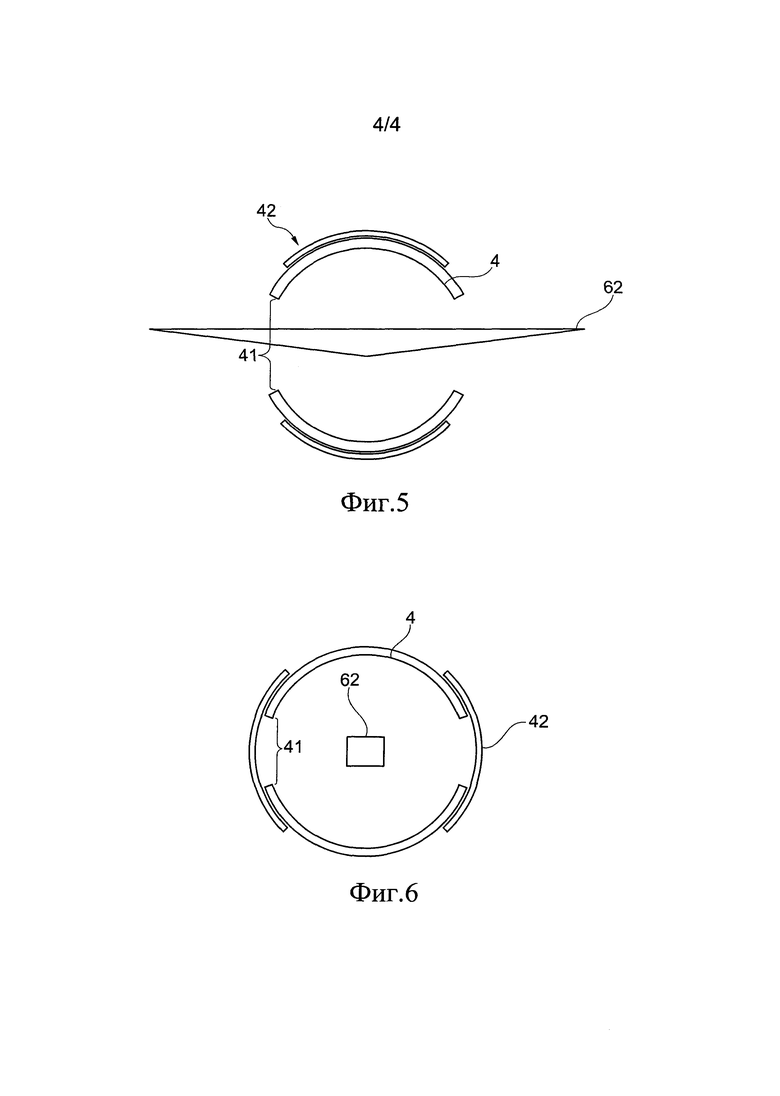
Фиг. 5 изображает разрез пилона 4, на котором пропеллер показан в неостановленном положении. Лопасти 62 находятся в неостановленном положении, то есть в положении, обеспечивающем нормальную работу несущих винтов, согласно варианту выполнения, изображенному на Фиг. 5. Как показано на чертеже, в пилоне 4 с обеих сторон выполнено отверстие 41. Указанный пропеллер выполнен с возможностью свободного вращения в отверстии 41 пилонов 4. В проиллюстрированном варианте выполнения уплотнительное средство 42 для закрывания отверстий 41 имеет форму, соответствующую форме наружного контура пилонов 4, и его профиль представляет собой криволинейные части оболочки. В проиллюстрированном варианте выполнения уплотнительное средство 42 выполнено из частей оболочки в виде одной детали. Уплотнительное средство 42 может иметь практически любую требуемую форму и может быть выполнено в виде одной или нескольких частей для каждой стороны отверстия. В проиллюстрированном варианте выполнения уплотнительное средство 42 в открытом состоянии расположено снаружи пилонов 4. В альтернативном варианте выполнения (не показан на чертежах) средство 42 в открытом состоянии может быть целиком или частично расположено внутри пилонов 4.
Фиг. 6 изображает разрез пилона 4, на котором пропеллер показан в остановленном положении. Во варианте выполнения, показанном на Фиг. 6, лопасти 62 находятся в остановленном положении. В остановленном положении лопасти 62 проходят в продольном направлении относительно пилонов 4. В остановленном положении лопасти 62 пропеллера не выступают за наружные габариты пилонов 4. Когда лопасти 62 находятся в остановленном положении, обеспечивается возможность закрывания отверстий 41, в которых пропеллер расположен с возможностью вращения в рабочем состоянии, с помощью средства 42. Во варианте выполнения, изображенном на Фиг. 6, части оболочки средства 42 перекрывают отверстия 41. Уплотнительное средство 42 закрывает отверстия 41 снаружи и вместе с наружной поверхностью пилонов 4 образует наружную поверхность, которая является оптимальной с точки зрения аэродинамики, насколько это возможно. В проиллюстрированном варианте выполнения средство 42 выходит за пределы верхнего и нижнего краев отверстий 41. В альтернативном варианте выполнения уплотнительное средство 42 также может закрывать отверстие 41 заподлицо и может не перекрывать края отверстий 41 или минимально перекрывать их на внутренней и/или наружной стороне пилонов 4. Во варианте выполнения, изображенном на Фиг. 5 и 6, пилон 4 имеет сечения практически круглой формы. Пилон 4 может иметь практически любую требуемую форму, которая является подходящей с точки зрения аэродинамики и при которой пилон предпочтительно полностью вмещает указанные лопасти пропеллера в остановленном положении.
Несмотря на то, что настоящее изобретение раскрыто и описано в целом в отношении отдельных вариантов выполнения, для специалистов в данной области техники должно быть понятно, что возможно осуществление многочисленных видоизменений в конструкции и деталях, не выходя за рамки сущности и объема изобретения, которые определены прилагаемой формулой изобретения. Таким образом, объем настоящего изобретения определен прилагаемой формулой изобретения, и, следовательно, включает все модификации, подпадающие под буквальный смысл пунктов формулы изобретения или являющиеся их эквивалентами.
Список номеров позиций
1 летательный аппарат
2 опорная конструкция
3 фюзеляж
4 пилон
41 отверстие
42 уплотнительное средство
5 узел крыла
51 главное крыло
52 поворотный руль высоты
6 несущий винт
61 пропеллер
62 лопасти пропеллера
7 движитель
FV подъемная сила
FH движущая сила
| название | год | авторы | номер документа |
|---|---|---|---|
| СКОРОСТНОЙ ГИБРИДНЫЙ ВИНТОКРЫЛ | 2017 |
|
RU2652868C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1990 |
|
RU2014247C1 |
| Летательный аппарат вертикального взлета и посадки с дополнительными грузовыми модулями и выдвигаемыми воздушными винтами | 2021 |
|
RU2759061C1 |
| СПОСОБ ПОЛЕТА В ВОЗДУХЕ С ВОЗМОЖНОСТЬЮ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ И РОТОРОПЛАН С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 2009 |
|
RU2414388C1 |
| Конвертируемый летательный аппарат | 2019 |
|
RU2723104C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ВОЗДУШНЫМИ ВИНТАМИ НА ПОВОРОТНЫХ ЗАКРЫЛКАХ КРЫЛА | 2021 |
|
RU2757693C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| БЕСПИЛОТНЫЙ ПАЛУБНЫЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2017 |
|
RU2661277C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
Изобретение относится к области авиации, в частности к конструкциям многовинтовых летательных аппаратов. Летательный аппарат (1) содержит опорную конструкцию (2), содержащую по меньшей мере один центральный фюзеляж (3) и два пилона (4), каждый из которых расположен сбоку на расстоянии от фюзеляжа (3). Летательный аппарат (1) также содержит узел (5) крыла, по меньшей мере четыре несущих винта (6) и по меньшей мере один движитель (7). Каждый несущий винт (6) прикреплен к опорной конструкции (2), содержит пропеллер (61), имеющий две лопасти (62), и предназначен для создания подъемной силы (FV), действующей на летательный аппарат (1) в вертикальном направлении. Движитель (7) предназначен для создания движущей силы (FH), действующей на опорную конструкцию (2) в горизонтальном направлении. Каждый пилон (4) содержит два несущих винта (6), которые обеспечивают остановку соответствующих лопастей (62) пропеллеров в определенном положении относительно пилонов (4). Пропеллеры (61) расположены в пилонах (4) так, что они огорожены пилоном по меньшей мере с двух противоположных сторон. Обеспечивается фиксация пропеллеров в положении, при котором их лопасти не выходят за пределы пилонов, в том числе при быстром полете вперед, что улучшает аэродинамические характеристики аппарата. 13 з.п. ф-лы, 6 ил.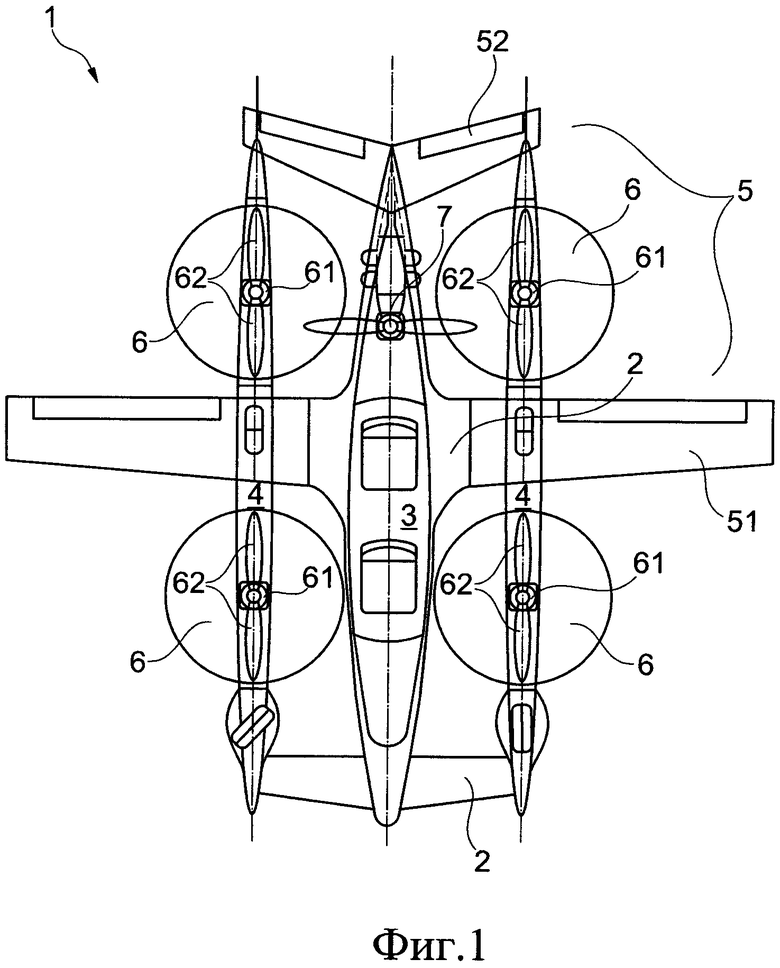
1. Летательный аппарат (1), содержащий:
опорную конструкцию (2), которая содержит по меньшей мере один центральный фюзеляж (3) и два пилона (4), каждый из которых расположен сбоку на расстоянии от фюзеляжа (3),
узел (5) крыла,
по меньшей мере четыре несущих винта (6),
по меньшей мере один движитель (7),
причем каждый из несущих винтов (6) прикреплен к опорной конструкции (2), содержит пропеллер (61), имеющий две лопасти (62), и выполнен с возможностью создания при вращении пропеллера (61) подъемной силы (FV), действующей на летательный аппарат (1) в вертикальном направлении, а движитель (7) выполнен с возможностью создания движущей силы (FH), действующей на опорную конструкцию (2) в горизонтальном направлении, и каждый пилон (4) содержит по меньшей мере два несущих винта (6), при этом несущие винты (6) выполнены с возможностью остановки соответствующих лопастей (62) пропеллеров в определенном положении относительно пилонов (4) и лопасти (62) пропеллера несущего винта (6) в остановленном положении не выступают за наружные габариты пилонов (4), при этом пропеллеры (61) расположены в пилонах так, что они огорожены пилоном по меньшей мере с двух противоположных сторон.
2. Летательный аппарат по п.1, в котором пилоны (4) имеют отверстия (41), которые открыты с обеих сторон перпендикулярно продольному направлению пилонов (4) и в которых размещены пропеллеры (61) несущих винтов (6).
3. Летательный аппарат по п.2, в котором указанные отверстия (41) образуют непрерывное отверстие (41) в пилоне (4), проходящее перпендикулярно продольному направлению пилонов (4).
4. Летательный аппарат по п.2, в котором отверстие (41) в пилонах (4) выполнено для каждого из пропеллеров (61) несущих винтов (6).
5. Летательный аппарат по п.2, в котором пилоны (4) содержат по меньшей мере одно уплотнительное средство (42), закрывающее сбоку отверстия (41), когда лопасти (62) пропеллера остановлены.
6. Летательный аппарат по п.5, в котором уплотнительное средство (42) выполнено из одной или нескольких частей.
7. Летательный аппарат по п.1, в котором узел (5) крыла прикреплен к опорной конструкции (2) и выполнен с возможностью создания подъемной силы для летательного аппарата (1) во время его горизонтального перемещения, и для этого указанный узел содержит по меньшей мере одну аэродинамическую поверхность (51), профиль которой обеспечивает создание динамической подъемной силы.
8. Летательный аппарат по п.1, в котором пилоны (4) присоединены к центральному фюзеляжу (3) с помощью указанного по меньшей мере одного узла (5) крыла.
9. Летательный аппарат по п.1, в котором несущие винты (6) размещены так, что плоскость вращения лопастей (62) пропеллера несущего винта (6) является неподвижной относительно оси ротора несущего винта (6), приводимой во вращение двигателем.
10. Летательный аппарат по п.9, в котором лопасти (62) пропеллера несущего винта (6) жестко соединены с указанной осью ротора.
11. Летательный аппарат по п.1, в котором лопасти пропеллера движителя (7) с возможностью вращения присоединены к оси ротора с обеспечением возможности изменения угла их наклона.
12. Летательный аппарат по п.1, в котором несущие винты (6) и движитель (7) выполнены с возможностью приведения в действие посредством двигателей, которые выполнены с возможностью управления независимо друг от друга.
13. Летательный аппарат по одному из предыдущих пунктов, в котором каждый из несущих винтов (6) выполнен с возможностью приведения в действие посредством электродвигателя.
14. Летательный аппарат по п.13, в котором движитель (7) выполнен с возможностью приведения в действие двигателем внутреннего сгорания, соединенным с генератором для обеспечения подачи электроэнергии к электродвигателям несущих винтов (6), или движитель (7) выполнен с возможностью приведения в действие электродвигателем, при этом подача электрической энергии для работы указанных электродвигателей обеспечивается от батареи или генератора.
| US 3260476 A, 12.07.1966 | |||
| WO 2006113877 A2, 26.10.2006 | |||
| US 20130020429 A1, 24.01.2013 | |||
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
| СИСТЕМА ДЛЯ ПРЕОБРАЗОВАНИЯ САМОЛЕТА САМОПОДДЕРЖИВАЕМОГО ГОРИЗОНТАЛЬНОГО ПОЛЕТА И ГОРИЗОНТАЛЬНОГО ВЗЛЕТА В ГИБРИДНЫЙ КОМБИНИРОВАННЫЙ САМОЛЕТ САМОПОДДЕРЖИВАЕМОГО ГОРИЗОНТАЛЬНОГО ПОЛЕТА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 1998 |
|
RU2218290C2 |

