Изобретение относится к летательным аппаратам тяжелее воздуха с вертикальным взлетом и посадкой, в частности к способам и средствам создания подъемной силы и силы тяги у летательного аппарата с использованием мощности двигателя, и к устройствам, осуществляющим этот способ полета.
Изобретение может быть использовано для транспортировки различных грузов и перевозки людей на значительные расстояния, на которых в настоящее время использованы винтовые самолеты с горизонтальной тягой.
Известен (Политехнический словарь. Под ред. академика А.Ю.Ишлинского. М., Советская энциклопедия, 1980, стр.75, 76; У.Джонсон. Теория вертолета. М., Мир, 1983) способ полета в воздухе, применяемый в вертолетах, заключающийся в том, что используют несущий винт, который вращают в горизонтальной плоскости, направляют вниз созданный несущим винтом поток воздуха и за счет этого создают подъемную силу.
Недостатком этого способа является то, что он не обеспечивает экономичность и высокие скорости горизонтального полета по сравнению с винтокрылыми самолетами и поэтому не является приемлемым способом для транспортного средства, предназначенного для полета на большие расстояния.
Известен (патент US 3612445, 1971) аппарат вертикального взлета и посадки типа «летающая тарелка», имеющий вентилятор высокого давления, создающий тягу в вертикальной плоскости с возможностью направлять напорные струи воздуха по касательной к поверхности аппарата.
Известен также (патент RU 2151717, 1998) летательный аппарат типа «летающей тарелки» с вентилятором высокого давления, выполненного из двух центробежных винтов, вращающихся в противоположные стороны, с направлением напорных струй, как у предыдущего аналога.
Недостатком этих аналогов является большая скорость и маленький расход рабочего воздуха, что приводит к большим энергетическим затратам двигателя и низкому пропульсивному КПД движителя, как на режиме влета и посадки, так и на режиме горизонтального полета, особенно на последнем режиме, так как подъемная сила при этом создается за счет вертикальной реактивной струи, имеющей большую скорость. Эффект эжекции и ускорения вторичного окружающего воздуха высокоскоростной струей происходит с большими потерями, что только незначительно повышает пропульсивный КПД движителя.
Известен ротороплан (патент RU 2245824). Известный ротороплан содержит фюзеляж, расположенный между двумя роторами с крыльями, выполненными в виде лопастей, продольные оси которых расположены в горизонтальных плоскостях.
Недостатком изобретения является малые опорные площади крыльев, которые должны выполнять функции несущих поверхностей ротороплана. Поэтому скорость движения крыльев должна быть увеличенной. Это вызовет большие энергетические затраты двигателя на режиме горизонтального полета по сравнению с аналогичными затратами у самолета, который крыльями создает большой вертикальный расход воздуха, но с малой скоростью, обеспечивая при этом ту же необходимую подъемную силу при высоком пропульсивном КПД. Для ликвидации этого недостатка в указанном патенте крылья выполняют составными, состоящими из многих элементов, что снижает пропульсивный КПД этой несущей и одновременно движущей системы. Следовательно, этот ротороплан не может быть транспортным средством для больших расстояний. Кроме того, ввиду малых несущих поверхностей этого ротороплана он лишен возможности планировать с неработающим двигателем.
Известны (патент RU 2227107) способ создания подъемной силы и горизонтальной силы тяги аэродинамическими поверхностями и соответствующее этому способу устройство (патент RU 2232105) аэродинамического подъемно-тянущего движителя для летательных аппаратов. Указанный способ реализуют в устройстве, которое представляет собой аэродинамический движитель, устанавливаемый для создания подъемной силы и силы тяги, содержащий раму, вращающуюся от двигателя. На раме закреплены на карданных шарнирах несколько аэродинамических поверхностей, установленных на определенных расстояниях от центра вращения рамы. Аэродинамические поверхности вращаются на своих креплениях в противоположную сторону с угловой скоростью вращения рамы и одновременно имеют возможность совершать на этих креплениях колебания синхронно с вращением рамы.
Недостатком этого изобретения также являются малые несущие плоскости (роль которых выполняют аэродинамические поверхности движителя) для экономичного горизонтального полета с большой скоростью.
Наиболее близкими по совокупности признаков являются (патент RU 2184685) способ полета в воздухе и устройство для его осуществления в виде летательного аппарата. Согласно известному источнику информации для создания подъемной силы используют круглую в плане аэродинамическую поверхность, являющуюся несущей плоскостью, и с использованием связанного с двигателем ротора с большими горизонтальными лопастями создают вертикальный направленный вниз воздушный поток, который затем направляют радиально и горизонтально, чем образуют пониженное давление в замкнутом объеме над несущей плоскостью, за счет чего создают подъемную силу, а для противодействия вращающему моменту, создаваемому вращающимся ротором, применяют расположенные по окружности вертикальные аэродинамические плоскости, при этом преобразование радиальных, равномерных по всей окружности скоростей воздуха, создаваемых горизонтальными лопастями, в однонаправленный поток для горизонтального полета осуществляется с помощью отклоняемых вверх или вниз закрылков.
В этом прототипе большие горизонтальные лопасти создают соответствующий большой расход воздуха, движущегося сверху вниз, и для образования подъемной силы требуются меньшие скорости, и обеспечивается больший пропульсивный КПД, чем у других, кроме вертолета, аналогов.
Недостатком этого прототипа является наличие вертикальных аэродинамических плоскостей, которые при горизонтальном полете будут создавать большое аэродинамическое сопротивление. Кроме того, для создания однонаправленного потока при горизонтальном полете разворачивают только часть воздуха, обладающего скоростью, что не обеспечит большую скорость этого полета, а при развороте закрылков возникают дополнительные потери, снижающие пропульсивный КПД. При взлете и посадке способ по прототипу также имеет недостаток: горизонтальные лопасти создают окружные составляющие скоростей воздуха, существенно большие, чем у вертолета. При выпрямлении этих скоростей вертикальными аэродинамическими плоскостями будет возникать потери, снижающие пропульсивный КПД.
Техническая задача, решаемая посредством разработанного технического решения, состоит в разработке нового способа взлета/посадки и горизонтального движения ротороплана.
Технический результат, получаемый при реализации разработанного технического решения, состоит в обеспечении условий для вертикального взлета и посадки с высоким пропульсивным КПД - близким к КПД вертолета на этих режимах, и условий для горизонтального полета со скоростью не менее 500-600 км/ч и с высоким пропульсивным КПД - близким к КПД винтового самолета на этом режиме.
Указанный технический результат по способу полета в воздухе с возможностью вертикального взлета и посадки летательного аппарата достигается использованием разработанного способа полета с возможностью вертикального взлета и посадки, включающий создание воздушного потока путем использования аэродинамической поверхности, являющейся несущей плоскостью, и с использованием связанного с двигателем роторного движителя с лопастями, направляющего поток воздуха из окружающего пространства радиально и параллельно поверхности, что изменяет давление в замкнутом объеме у аэродинамической поверхности с образованием потока воздуха сверху вниз и перепада давления на несущую плоскость, приводящим к созданию подъемной силы, при этом путем изменения углов поворота вертикальных и горизонтальных направляющих плоскостей регулируют положение аэродинамической поверхности в пространстве, причем у несущей плоскости устанавливают, по меньшей мере, один роторный движитель или два роторных движителя, вращающихся в противоположные стороны, при этом продольные оси лопастей располагают вертикально и по окружности, занимающей большую часть несущей плоскости, в режиме взлета и посадки обеспечивают постоянные углы атаки лопастей, направляют воздух радиально-горизонтально и создают перепад давления на несущую плоскость и подъемную силу также за счет изменения давления в замкнутом объеме у аэродинамической поверхности, а при горизонтальном полете изменяют угол атаки лопастей в период каждого оборота, направляют воздух горизонтально в сторону, противоположную направлению движения ротороплана, или частично радиально и создают горизонтальную силу тяги, а подъемную силу создают за счет движения несущей плоскости под углом атаки или частично за счет изменения давления в замкнутом объеме у аэродинамической поверхности. В одном из вариантов реализации горизонтальный поток воздуха создают с использованием дополнительных реактивных движителей, при этом роторные движители выполнены с постоянными углами атаки. Обычно при использовании одного роторного движителя дополнительно устанавливают хвостовой винт, компенсирующий крутящий момент от роторного движителя. В некоторых вариантах реализации способа используют несущую плоскость в форме «летающей тарелки» или несущую плоскость минимально возможной толщины, прикрепленную к фюзеляжу. В качестве роторных движителей могут использовать вращающиеся диски, расположенные сверху и снизу несущей плоскости, с прикрепленными к их периферии лопастями, или при создании горизонтальной силы тяги другим движителем лопасти роторного движителя выполняют с постоянным углом атаки и убирают их на режимах горизонтального полета в ниши на дисках.
Для достижения указанного технического результата может быть использован ротороплан разработанной конструкции. Ротороплан с вертикальным взлетом и посадкой разработанной конструкции содержит двигатель, роторный движитель с лопастями, аэродинамическую поверхность, которая является несущей плоскостью, вертикальные и горизонтальные управляющие плоскости, регулирующие положение аэродинамической поверхности в пространстве; кроме того, он имеет один роторный движитель или два вращающихся в противоположные стороны роторных движителя, при этом продольные оси лопастей расположены параллельно осям вращения движителей, перпендикулярно к несущей плоскости, по окружности, близкой к краю аэродинамической поверхности, и содержит механизм управления углами атаки лопастей, которые создают направление потока воздуха таким образом, что в режиме взлета и посадки подъемная сила обеспечивается за счет перепада давления на несущую плоскость вследствие создания движителями радиально-горизонтального потока воздуха, а в режиме горизонтального полета подъемная сила обеспечивается за счет перепада давления на несущую плоскость в основном или только вследствие ее движения под углом атаки, при создании указанными движителями горизонтального потока воздуха и горизонтальной силы тяги, или для создания горизонтальной силы тяги используют дополнительный движитель, при этом лопасти роторных движителей имеют постоянные углы атаки. В одном из вариантов реализации ротороплан имеет форму несущей плоскости в виде «летающей тарелки» или летающего крыла. На его поверхности дополнительно могут быть размещены один или два вращающихся диска с закрепленными на их периферии лопастями, продольные оси которых перпендикулярны поверхностям дисков. Так же он может содержать тонкую несущую плоскость, прикрепленную к фюзеляжу. Кроме того, он может содержать роторный движитель и хвостовой винтовой движитель, компенсирующий крутящий момент от роторного движителя.
Как отмечено выше, при реализации способа для создания подъемной силы используют аэродинамическую поверхность, являющуюся несущей плоскостью, при этом с использованием связанного с двигателем ротора с лопастями создают воздушный поток, направляют его радиально и горизонтально, при этом осуществляют отсасывание воздуха из окружающего пространства и изменяют давление в замкнутом объеме у аэродинамической поверхности, образуя поток воздуха сверху вниз и перепад давления на несущую плоскость, чем создают подъемную силу, а путем изменения углов поворота вертикальных и горизонтальных управляющих плоскостей регулируют положение аэродинамической поверхности в пространстве.
Также согласно предлагаемому способу при создании одного или двух вращающихся в противоположные стороны роторных движителей располагают продольные оси лопастей примерно вертикально и по окружности, занимающей большую часть несущей плоскости, и управляют углами атаки лопастей или образуют постоянный угол атаки, создавая направление потока воздуха таким образом, что в режиме взлета и посадки подъемную силу обеспечивают за счет перепада давления на несущую плоскость вследствие создания движителями радиального потока воздуха, а в режиме горизонтального полета создают указанными или другими движителями горизонтальный поток воздуха и горизонтальную силу тяги, а подъемную силу обеспечивают за счет перепада давления на несущую плоскость в основном или только вследствие ее движения под углом атаки.
В указанном способе возможны варианты:
- в режиме взлета и посадки устанавливают постоянный угол атаки лопастей и создают подъемную силу за счет того, что, например, одним движителем, расположенным над несущей плоскостью, направляют воздух от ее центра к краю и образуют разряжение над этой плоскостью, другим движителем, расположенным снизу, направляют воздух к центру плоскости от ее края и создают давление под ней, или оба движителя или единственный движитель располагают над несущей плоскостью и создают над ней разряжение, устанавливая при одном роторном движителе хвостовой винт, компенсирующий крутящий момент от роторного движителя, а в режиме горизонтального полета изменяют угол атаки лопастей в период каждого оборота движителей, за счет чего при малых скоростях полета направляют воздух радиально и горизонтально, создавая одновременно подъемную силу, как при взлете и посадке, и горизонтальную силу тяги, при этом горизонтальными управляющими плоскостями образуют угол атаки несущей плоскости и тем самым создают дополнительный перепад давления на несущую плоскость и дополнительную подъемную силу, а при увеличении скорости полета увеличивают долю воздуха горизонтального направления и обеспечивают подъемную силу в основном или только за счет движения несущей плоскости под углом атаки;
- несущую плоскость выполняют в виде «летающей тарелки» или выполняют ее, по возможности, малой толщины и крепят к фюзеляжу;
- лопасти движителей крепят к периферии вращающихся дисков, расположенных сверху и снизу несущей плоскости, или лопасти одного движителя крепят к периферии вращающегося диска, или при создании горизонтальной силы тяги другим движителем лопасти роторного движителя выполняют с постоянным углом атаки и убирают их в ниши на режимах горизонтального полета.
Предлагаемый способ реализуют в ротороплане с вертикальным взлетом и посадкой, содержащем двигатель, роторный движитель с лопастями, аэродинамическую поверхность, которая является несущей плоскостью, вертикальные и горизонтальные управляющие плоскости, регулирующие положение аэродинамической поверхности в пространстве. Согласно разработанной конструкции он имеет один или два вращающихся в противоположные стороны роторных движителя, у которых продольные оси лопастей расположены примерно параллельно осям вращения движителей, перпендикулярно к несущей плоскости, по окружности, близкой к краю аэродинамической поверхности, и он может содержать механизм управления углами атаки лопастей, которые создают направление потока воздуха таким образом, что в режиме взлета и посадки подъемная сила обеспечивается за счет перепада давления на несущую плоскость вследствие создания движителями радиального потока воздуха, а в режиме горизонтального полета подъемная сила возникает за счет перепада давления на несущую плоскость в основном или только вследствие ее движения под углом атаки, при создании указанными или другим движителями горизонтального потока воздуха и горизонтальной силы тяги, и, кроме того, ротороплан может иметь форму несущей плоскости в виде «летающей тарелки» или летающего крыла и может иметь на поверхности вращающиеся один или два диска, с закрепленными на их периферии лопастями, продольные оси которых примерно перпендикулярны поверхностям дисков, или ротороплан может иметь фюзеляж, к которому закреплена тонкая несущая плоскость, а при одном роторном движителе ротороплан может иметь хвостовой винтовой движитель, компенсирующий крутящий момент от роторного движителя.
На фиг.1…11 показано применение предлагаемого способа к ротороплану, выполненному в виде «летающей тарелки» или имеющему фюзеляж, к которому закреплена несущая плоскость.
Фиг.1. Схема способа обеспечения вертикального взлета и посадки с расположением роторных движителей над несущей плоскостью и под ней. Продольный разрез.
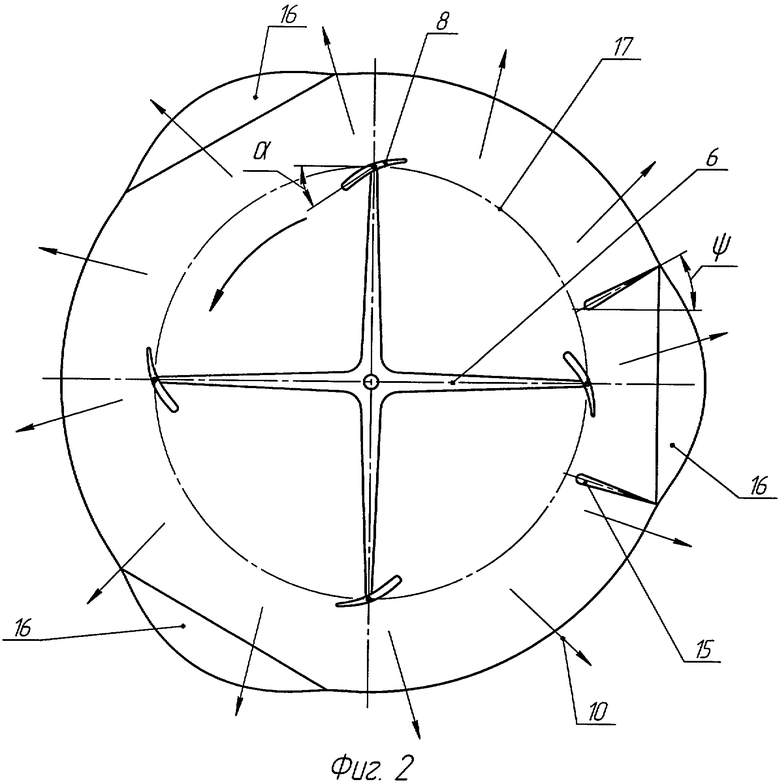
Фиг.2. Схема способа обеспечения вертикального взлета и посадки с расположением роторных движителей над несущей плоскостью и под ней. Вид сверху.
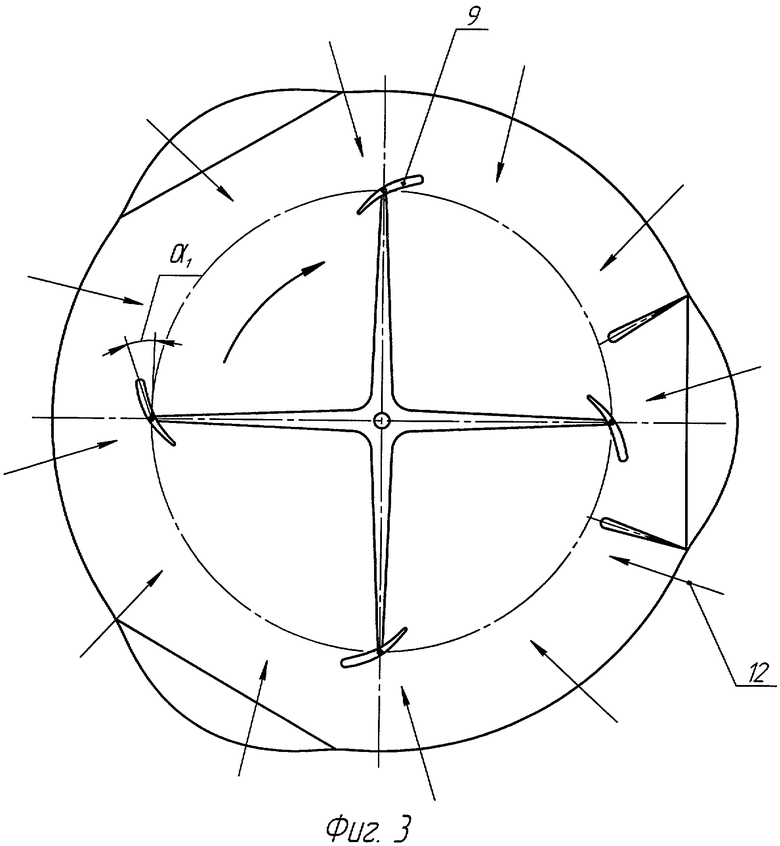
Фиг.3. Схема способа обеспечения вертикального взлета и посадки с расположением роторных движителей над несущей плоскостью и под ней. Вид снизу.
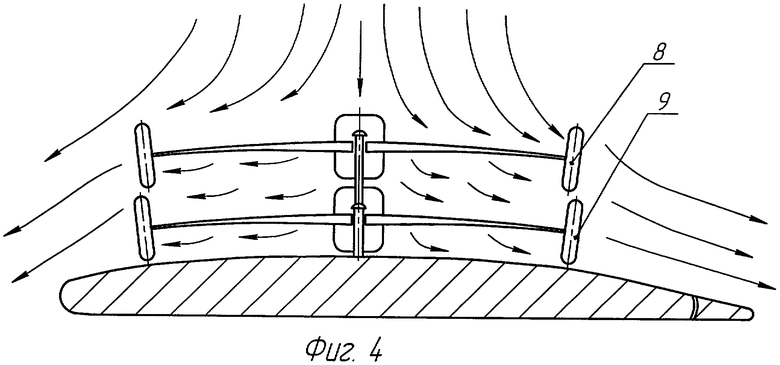
Фиг.4. Схема способа обеспечения вертикального взлета и посадки с расположением двух роторных движителей над несущей плоскостью. Продольный разрез.
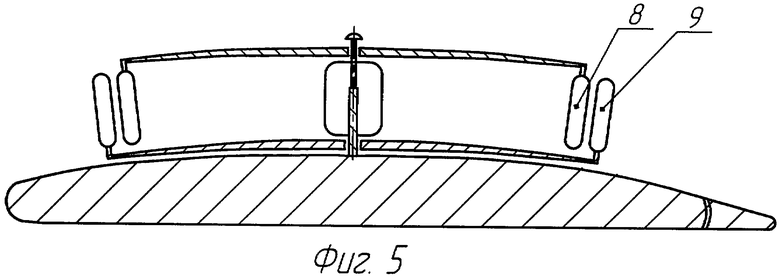
Фиг.5. Схема способа обеспечения вертикального взлета и посадки с расположением роторных движителей над несущей плоскостью с двухступенчатым расположением лопастей. Продольный разрез.
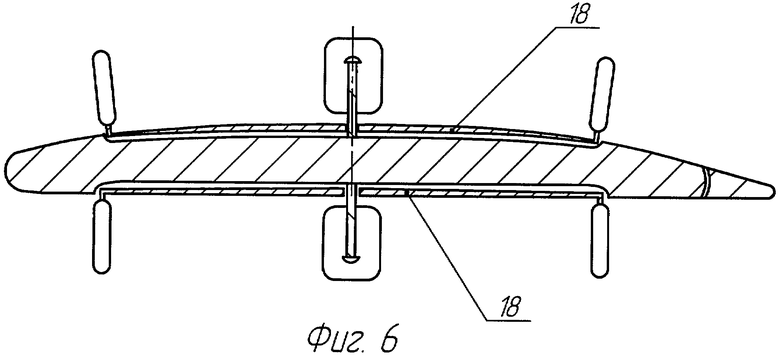
Фиг.6. Схема способа обеспечения вертикального взлета и посадки с расположением роторных движителей над несущей плоскостью и под ней с закреплением лопастей на вращающихся дисках. Продольный разрез.
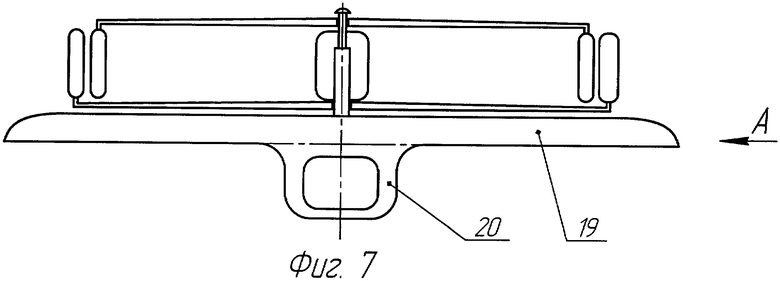
Фиг.7. Схема способа обеспечения вертикального взлета и посадки, а также горизонтального полета с креплением тонкой несущей плоскости к верхней части фюзеляжа.
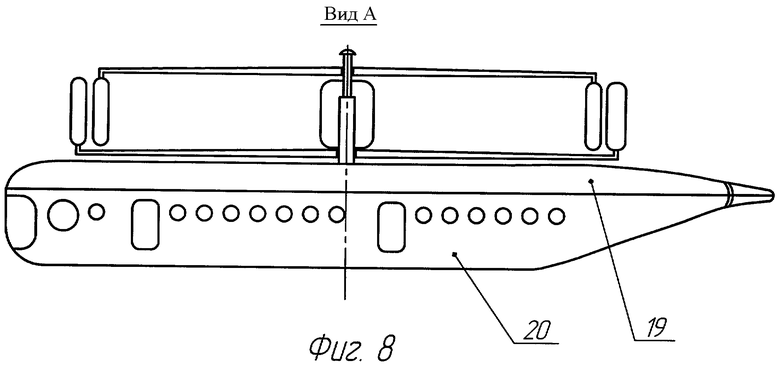
Фиг.8. Схема способа обеспечения вертикального взлета и посадки, а также горизонтального полета с креплением тонкой несущей плоскости к верхней части фюзеляжа. Вид по стрелке А на фиг.7.
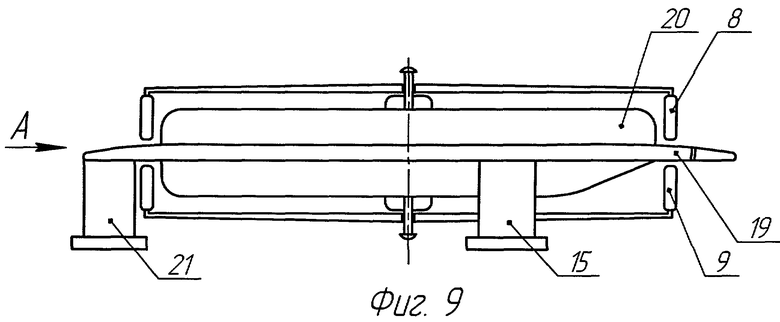
Фиг.9. Схема способа обеспечения вертикального взлета и посадки, а также горизонтального полета с креплением тонкой несущей плоскости к бортам фюзеляжа.
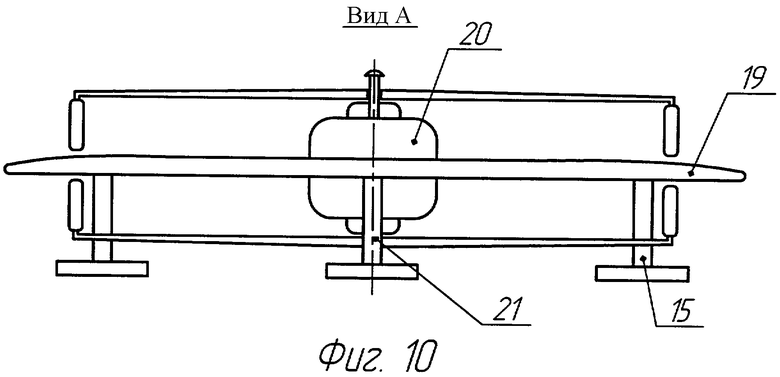
Фиг.10. Схема способа обеспечения вертикального взлета и посадки, а также горизонтального полета с креплением тонкой несущей плоскости к бортам фюзеляжа. Вид по стрелке А на фиг.9.
Фиг.11. Схема способа обеспечения горизонтального полета. Вид в плане на один из движителей.
Фиг.12. Вариант выполнения несущей плоскости, аналогичной крылу самолета.
Фиг.13 Вариант летательного аппарата с одним роторным движителем, несущей плоскостью и хвостовым винтом.
На фиг.1 показана схема способа обеспечения вертикального взлета и посадки с расположением роторных движителей над несущей плоскостью и под ней. Продольный разрез. На аэродинамической поверхности 1, которая образует «летающую тарелку» 2, являющуюся одновременно несущей плоскостью, установлены сверху и снизу роторные движители 3 и 4. Они состоят из приводных валов 5, связанных с двигателем, размещенным внутри «летающей тарелки», штанг 6 и 7 и лопастей 8 и 9. Каждый ротор выполняют, например, из четырех лопастей, закрепленных к концам четырех штанг. Оси лопастей располагают перпендикулярно аэродинамической поверхности и примерно параллельно оси вращения движителей (примерно вертикально). Лопасти выполнены с возможностью управления их углом атаки в период каждого оборота и при изменении режима движения ротороплана. Угол атаки лопастей верхнего движителя на режиме взлета и посадки устанавливают под одинаковым углом атаки таким образом, что эти лопасти создают радиальный поток воздуха (с некоторой окружной составляющей), направленный от центра несущей плоскости к периферии, как показано стрелками 10. При этом отсасывают воздух из окружающего пространства и образуют поток воздуха сверху вниз, как показано стрелками 11. Как следствие, изменяется давление в замкнутом объеме, образованном вращающимися лопастями у аэродинамической поверхности. Над несущей плоскостью создается разряжение.
Угол атаки лопастей нижнего движителя на режиме взлета и посадки устанавливают под одинаковым углом атаки таким образом, что эти лопасти создают радиальный поток воздуха (с некоторой окружной составляющей), как показано стрелками 12, направленный от периферии к центру несущей плоскости. При этом осуществляют отсасывание воздуха из окружающего пространства, как показано стрелками 13. Как следствие, изменяется давление в замкнутом объеме, образованном вращающимися лопастями. Под несущей плоскостью создается повышенное давление, в результате чего образуется поток воздуха также сверху вниз, как показано стрелками 14.
Перепад давления, образованный разряжением над несущей плоскостью и повышенным давлением под ней, создает подъемную силу на режиме взлета и посадки.
Поскольку верхний и нижний движители вращаются в противоположные стороны, то моменты реакций от окружных составляющих скоростей, передаваемых от движителей на «летающую тарелку» - компенсируются.
На аэродинамической поверхности расположены вертикальные 15 и горизонтальные 16 управляющие аэродинамические поверхности (закрылки) с управляемыми углами поворота φ. Эти поверхности играют роль воздушных рулей.
Отличительная особенность роторного движителя в предлагаемом изобретении от роторного движителя судового типа состоит в том, что на судах роторный движитель создает силу тяги только в горизонтальном направлении в любую сторону, а в предлагаемом изобретении роторный движитель создает и вертикальную подъемную силу, и горизонтальную силу тяги в одном или, при необходимости, в любом направлении.
На фиг.2 (вид сверху на фиг.1) показана схема способа обеспечения вертикального взлета и посадки с расположением роторных движителей над несущей плоскостью и под ней. Там показаны установленные на штангах 6 лопасти 8, которые выполняют с возможностью управления углом атаки α, обеспечивающим необходимый радиальный поток воздуха, как показано стрелками 10. Лопасти располагают по окружности 17, занимающей большую часть несущей плоскости для обеспечения оптимальных условий создания подъемной силы на режимах взлета и посадки. На этих режимах угол атаки α в период каждого оборота постоянный и одинаковый у всех лопастей. Его величина определяет скорость исполнения режимов взлета и посадки. Вертикальные управляющие поверхности 15 устанавливают под углом ψ, обеспечивающим минимальное аэродинамическое сопротивление и при необходимости изменяют этот угол для стабилизации или изменения положения «летающей тарелки». Эти же цели обеспечиваются и углами поворота φ (см. фиг.1) горизонтальных управляющих поверхностей 16.
На фиг.3 (вид снизу на фиг.1) показана схема способа обеспечения вертикального взлета и посадки с расположением роторных движителей над несущей плоскостью и под ней. Там иллюстрирован способ обеспечения давления под несущей плоскостью, для чего устанавливают угол атаки α1 лопастей 9, создающий поток воздуха, направленный от периферии к центру несущей плоскости, как показано стрелками 12.
На фиг.4 показана схема способа обеспечения вертикального взлета и посадки с расположением двух роторных движителей над несущей плоскостью. Продольный разрез. Этот вариант способа обеспечивает создание зоны разряжения только над несущей плоскостью с помощью расположенных там двух вращающихся в противоположные стороны роторов с лопастями 8 и 9. В результате этого разряжения возникает перепад давления на несущую плоскость и подъемная сила.
На фиг.5 показана схема способа обеспечения вертикального взлета и посадки с расположением роторных движителей над несущей плоскостью с двухступенчатым расположением лопастей 8 и 9. Продольный разрез. Этот вариант способа обеспечивает создание зоны разряжения над несущей плоскостью с использованием двух роторов, вращающихся в противоположные стороны, установленных как двухступенчатый роторный движитель. Такое расположение увеличивает пропульсивный КПД движителя и исключает закручивание потока.
На фиг.6 показана схема способа обеспечения вертикального взлета и посадки с расположением роторных движителей над несущей плоскостью и под ней с закреплением лопастей на вращающихся дисках 18. Продольный разрез. Этот вариант способа обеспечивает возможность установки лопастей на двух вращающихся в противоположные стороны дисках, образующих центральные части аэродинамической поверхности сверху и снизу. Такое устройство создает большую величину гироскопических сил, обеспечивающих лучшую устойчивость летательного аппарата.
На фиг.7 показана схема способа обеспечения вертикального взлета и посадки, а также горизонтального полета с креплением тонкой несущей плоскости 19 к верхней части фюзеляжа 20. Этот вариант обеспечивает привычную компоновку летательного аппарата.
На фиг.8 показан вид по стрелке А на фиг.7, где тонкая несущая плоскость 19 закреплена к фюзеляжу 20.
На фиг.9 показана схема способа обеспечения вертикального взлета и посадки, а также горизонтального полета с креплением тонкой несущей плоскости 19 к бортам фюзеляжа 20. В этом варианте вертикальные управляющие аэродинамические поверхности 15 являются одновременно и опорами ротороплана, кроме того, спереди установлена дополнительная опора 21. Такая компоновка ротороплана обеспечивает более качественное равновесие сил аэродинамического сопротивления и сил тяги, создаваемой лопастями 8 и 9, при горизонтальном полете.
На фиг.10 - вид по стрелке А на фиг.9, где показано расположение фюзеляжа 20, несущей плоскости 19, передней 21 и боковых опор 15.
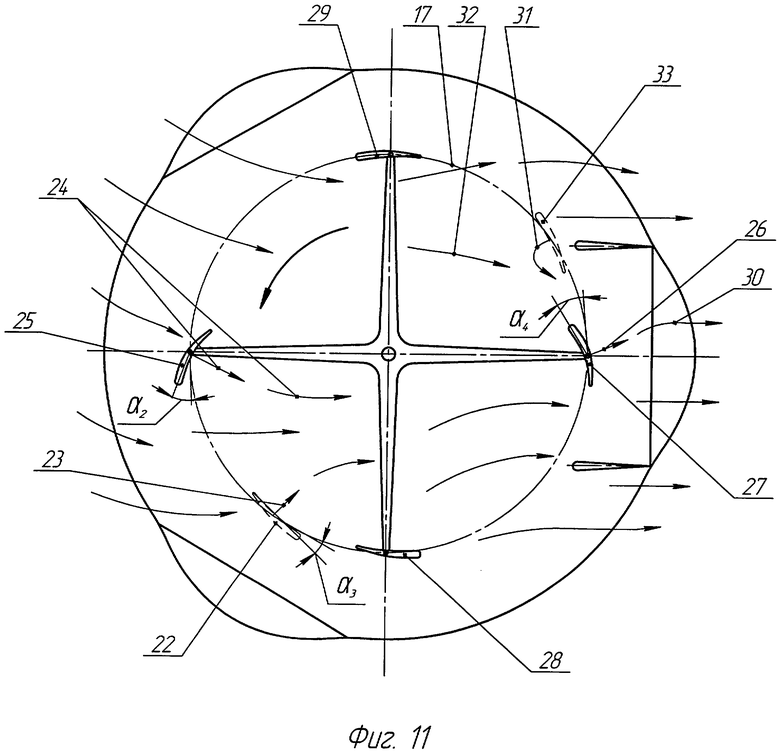
На фиг.11 показана схема способа обеспечения горизонтального полета (вид в плане на ротороплан). Там иллюстрирован способ установки углов атаки α2 лопастей 25 в режиме горизонтального полета. Этот угол атаки изменяют по мере вращения лопасти по окружности 17 в период каждого оборота таким образом, чтобы он был оптимальным для создания движения на малых, промежуточных и больших скоростях горизонтального полета. В промежуточном положении 22 лопасти угол атаки α3 устанавливают таким, чтобы поток 23 выпрямлял бы поток 24, создаваемый лопастью в положении 25. Аналогичное выпрямление потока 26 в поток 30 происходит в положении 27 лопасти, расположенной под углом атаки α4, за счет потока 31, создаваемого попутным потоком 32 и лопастью в положении 33. В положениях 28 и 29 лопастей углы атаки примерно нулевые. Углы атаки в этих положениях могут быть отличными от нуля для создания радиальных составляющих скоростей при образовании необходимой подъемной силы на малых скоростях полета. При этом направляют воздух радиально и горизонтально, создавая одновременно подъемную силу (как при взлете и посадке) и горизонтальную тягу. Одновременно горизонтальными управляющими плоскостями образуют угол атаки несущей плоскости, создавая дополнительную подъемную силу. С увеличением скорости горизонтального полета увеличивают долю воздуха горизонтального направления и обеспечивают подъемную силу в основном за счет угла атаки несущей плоскости.
Такое, предусмотренное в предлагаемом способе перераспределение роли несущей плоскости, с режима вертикального взлета на режим горизонтального полета с малой скоростью и далее на режим горизонтального полета с большой скоростью, целесообразно потому, что аэродинамическая поверхность на режиме взлета и посадки исполняет роль несущей плоскости, которая создает подъемную силу за счет перепада давления на эту плоскость при радиальных потоках воздуха от движителей. А на режиме горизонтального полета с большой скоростью эта плоскость, расположенная под углом атаки, исполняет роль крыла самолета за счет горизонтального потока воздуха от этих же движителей. На промежуточных режимах несущая плоскость исполняет одновременно обе роли. Это выгодно для уменьшения при горизонтальном полете вертикальной составляющей скорости, при одновременном увеличении вертикального расхода воздуха, поскольку подъемная сила является произведением вертикального расхода воздуха на его скорость, а потеря энергии при создании подъемной силы пропорциональна величине вертикальной скорости. Следовательно, выгодно создавать большой вертикальный расход воздуха, но с меньшей скоростью. Такую функцию выполняет на режиме горизонтального полета несущая плоскость аэродинамической поверхности крыла самолета, которая существенно больше аэродинамических поверхностей движителей.
Роторный движитель, выполненный согласно предложенному способу, также как и несущий винт вертолета в режиме горизонтального полета, имеют общий недостаток: в положении 29 лопасть движется против направления движения и создает увеличенное аэродинамическое сопротивление. Однако у роторного движителя это сопротивление будет меньше, так как лопасть в этом положении движется без угла атаки (подъемная сила создается несущей плоскостью), а у вертолета угол атаки необходим во всех положениях для создания лопастями подъемной силы.
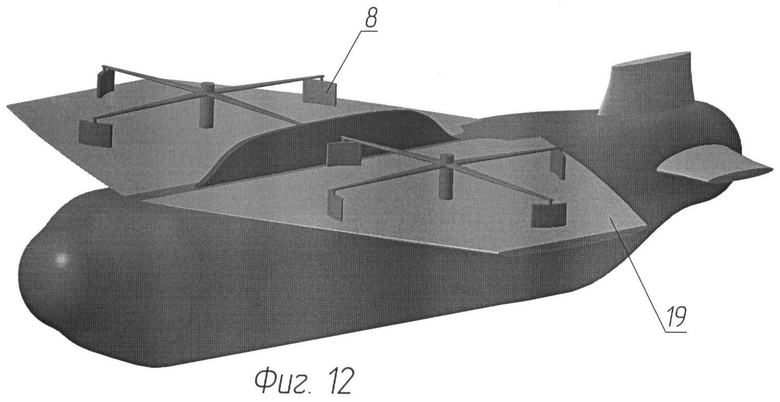
На фиг.12 показан вариант, в котором несущая плоскость 19 имеет форму крыльев самолета. Над крыльями расположены вращающиеся в противоположные стороны роторные движители с лопастями 8. Взлет и посадка, а также горизонтальный полет обеспечиваются по схемам, описанным выше.
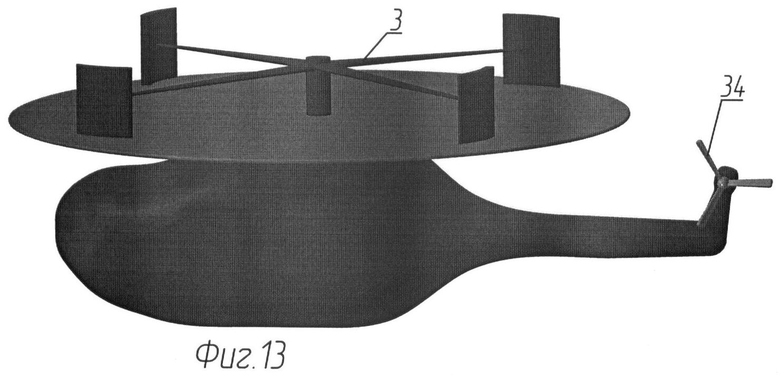
На фиг.13 показан вариант с одним роторным движителем 3 и с хвостовым винтом 34 для компенсации момента от роторного движителя. Этот вариант наиболее просто может быть преобразован из обычного вертолета, имеющего хвостовой винт. Система управления углами атаки лопастей роторного движителя на переходных режимах от взлета и посадки к горизонтальному полету будет не сложнее, чем у вертолета на аналогичных режимах. При этом скорость горизонтального полета будет существенно выше, а расход топлива значительно ниже.
Возможно исполнение летательного аппарата с дополнительным винтовым или реактивным движителем для создания силы тяги при горизонтальном полете. В этом случае роторные движители служат только для вертикального взлета и посадки, их лопасти имеют постоянный угол атаки, а при горизонтальном полете лопасти убирают в ниши.
Исследуя все аналоги, прототип и предлагаемое изобретение, а также другие виды летательных аппаратов, не указанные в этом описании, можно утверждать, что самым выгодным летательным аппаратом для взлета и посадки является вертолет, для горизонтального полета с умеренными скоростями - винтовой самолет, для горизонтального полета с большими скоростями - реактивный самолет.
Поэтому в данном изобретении предложено заменить крылья, обеспечивающие подъемную силу у самолета, на специальную несущую плоскость, которая должна, как и крылья, создавать подъемную силу на больших скоростях горизонтального полета под углом атаки и, кроме того, создавать подъемную силу на режимах вертикального взлета и посадки от действия перепада на нее давления благодаря радиальным потокам воздуха, а также предложен роторный движитель, который может создавать как радиальные, так и горизонтальные потоки воздуха с достаточно высоким пропульсивным КПД. Такой способ и устройство обеспечивают возможность создания летательного аппарата, обладающего преимуществом вертолета на режимах вертикального взлета и посадки и преимуществом винтового самолета при горизонтальном полете.
Изложенные доводы доказывают существенное преимущество предлагаемого изобретения перед аналогами, у которых аэродинамические поверхности движителей выполняют функцию несущих плоскостей, поскольку при создании подъемной силы на горизонтальном полете они создают потери большие, чем крылья самолетов. Преимущество перед прототипом состоит в том, что он не может осуществлять горизонтальный полет с большой скоростью. Преимущество перед вертолетом и самолетом состоит в том, что предлагаемый способ совмещает присущие им отдельно положительные качества: экономичность вертикального взлета-посадки и экономичного и дальнего горизонтального полета со сравнительно большой скоростью.
Таким образом, предложенные варианты способа полета летательного аппарата в воздухе обеспечивают создание наиболее целесообразных условий для вертикального взлета и посадки с высоким пропульсивным КПД - близким к КПД вертолета на этих режимах, а также условий для горизонтального полета со скоростью 500-600 км/ч и более, с высоким пропульсивным КПД - близким к КПД винтового самолета на этом режиме.
Изобретение относится к летательным аппаратам тяжелее воздуха с вертикальным взлетом и посадкой, в частности к способам и средствам создания подъемной силы и силы тяги у летательного аппарата с использованием мощности двигателя, и к устройствам, осуществляющим этот способ полета. Способ полета с возможностью вертикального взлета и посадки включает создание воздушного потока путем использования аэродинамической поверхности, являющейся несущей плоскостью, и с использованием связанного с двигателем роторного движителя с лопастями, направляющего поток воздуха из окружающего пространства радиально и параллельно поверхности. 2 н. и 8 з.п. ф-лы, 13 ил.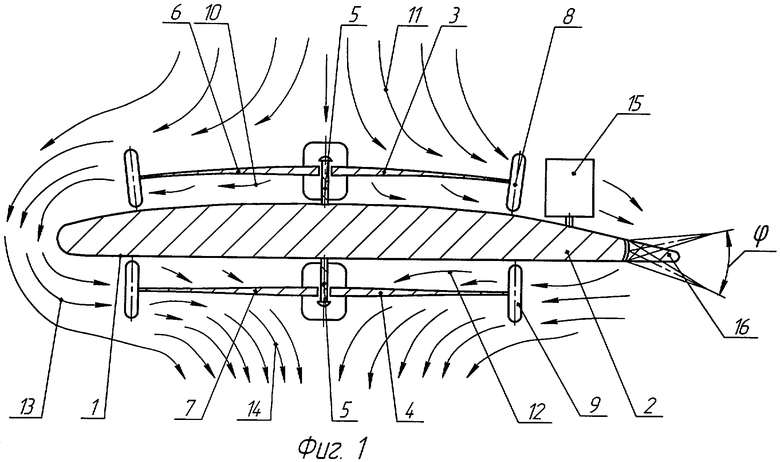
1. Способ полета с возможностью вертикального взлета и посадки, включающий создание воздушного потока путем использования аэродинамической поверхности, являющейся несущей плоскостью, и с использованием связанного с двигателем роторного движителя с лопастями, направляющими поток воздуха из окружающего пространства радиально и параллельно поверхности, что изменяет давление в замкнутом объеме у аэродинамической поверхности с образованием потока воздуха сверху вниз и перепада давления на несущей плоскости, приводящим к созданию подъемной силы, при этом путем изменения углов поворота вертикальных и горизонтальных управляющих плоскостей регулируют положение аэродинамической поверхности в пространстве, отличающийся тем, что у несущей плоскости устанавливают, по меньшей мере, один роторный движитель или два роторных движителя, вращающихся в противоположные стороны, при этом продольные оси лопастей располагают вертикально и по окружности, занимающей большую часть несущей плоскости, в режиме взлета и посадки обеспечивают постоянные углы атаки лопастей, направляют воздух радиально-горизонтально и создают перепад давления на несущей плоскости и подъемную силу за счет изменения давления в замкнутом объеме у аэродинамической поверхности, а при горизонтальном полете изменяют угол атаки лопастей роторного движителя в период каждого оборота, направляют воздух горизонтально обратно направлению движения или частично радиально и создают горизонтальную силу тяги, а подъемную силу создают за счет движения несущей плоскости под углом атаки или частично за счет изменения давления в замкнутом объеме у аэродинамической поверхности.
2. Способ по п.1, отличающийся тем, что горизонтальный поток воздуха создают с использованием дополнительных реактивных движителей, при этом роторные движители выполнены с постоянными углами атаки.
3. Способ по п.1, отличающийся тем, что при использовании одного роторного движителя дополнительно устанавливают хвостовой винт, компенсирующий крутящий момент от роторного движителя.
4. Способ по п.1, отличающийся тем, что используют несущую плоскость в форме «летающей тарелки» или несущую плоскость минимально возможной толщины, прикрепленную к фюзеляжу.
5. Способ по п.1, отличающийся тем, что в качестве роторных движителей используют вращающиеся диски, расположенные сверху и снизу несущей плоскости, с прикрепленными к их периферии лопастями, или при создании горизонтальной силы тяги другим движителем лопасти роторного движителя выполняют с постоянным углом атаки и убирают их на режимах горизонтального полета в ниши на дисках.
6. Ротороплан с вертикальным взлетом и посадкой, содержащий двигатель, роторный движитель с лопастями, аэродинамическую поверхность, которая является несущей плоскостью, вертикальные и горизонтальные управляющие плоскости, регулирующие положение аэродинамической поверхности в пространстве, отличающийся тем, что он имеет один роторный движитель или два вращающихся в противоположные стороны роторных движителя, при этом продольные оси лопастей расположены параллельно осям вращения движителей, перпендикулярно к несущей плоскости, по окружности, близкой к краю аэродинамической поверхности, и механизм управления углами атаки лопастей, которые создают направление потока воздуха таким образом, что в режиме взлета и посадки подъемная сила обеспечивается за счет перепада давления на несущей плоскости вследствие создания движителями радиально-горизонтального потока воздуха, а в режиме горизонтального полета подъемная сила обеспечивается за счет перепада давления на несущей плоскости в основном или только вследствие ее движения под углом атаки, при создании указанными движителями горизонтального потока воздуха и горизонтальной силы тяги или для создания горизонтальной силы тяги используют дополнительный движитель, при этом лопасти роторных движителей имеют постоянные углы атаки.
7. Ротороплан по п.6, отличающийся тем, что он имеет форму несущей плоскости в виде «летающей тарелки» или летающего крыла.
8. Ротороплан по п.6, отличающийся тем, что на его поверхности размещены один или два вращающихся диска с закрепленными на их периферии лопастями, продольные оси которых перпендикулярны поверхностям дисков.
9. Ротороплан по п.6, отличающийся тем, что он содержит тонкую несущую плоскость, прикрепленную к фюзеляжу.
10. Ротороплан по п.6, отличающийся тем, что он содержит роторный движитель и хвостовой винтовой движитель, компенсирующий крутящий момент от роторного движителя.
| СПОСОБ ПОЛЕТА В ВОЗДУХЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2184685C2 |
| РОТОРНЫЙ МАХОЛЕТ | 2001 |
|
RU2199470C2 |
| АКТИВНЫЙ БУФЕР ДЛЯ ЗАЩИТЫ ПАССАЖИРА В ПОСАДОЧНОЙ ОБЛАСТИ АВТОМОБИЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2015 |
|
RU2684350C2 |
| US 3104853 А, 24.09.1963 | |||
| Навигационное устройство заданной линии пути | 1989 |
|
SU1776994A1 |

