Изобретение относится к способу контроля допуска используемого в хирургической роботизированной системе хирургического инструмента согласно пункту 1 формулы изобретения и к хирургической роботизированной системе согласно ограничительной части пункта 9 формулы изобретения.
В области хирургии подобные способы или хирургические роботизированные системы используются для того, чтобы была возможность обеспечивать надежность роботизированных систем и предотвращать ошибочное применение инструментов в операционной области.
Из уровня техники известно при соединении хирургического инструмента с роботизированной системой предоставлять для идентификации соединяемого инструмента роботизированной системе необходимые данные. Так из EP 1 146 830 B1 известна хирургическая роботизированная система с процессором и держателем инструмента и, по меньшей мере, одним хирургическим роботизированным инструментом. Роботизированный инструмент включает в себя вал с проксимальным концом и дистальным концом, разъем на проксимальном конце вала, причем разъем может монтироваться на держателе инструмента. Кроме того, инструмент включает в себя исполнительный орган, который соединен с дистальным концом вала, причем исполнительный орган может перемещаться, по меньшей мере, в одной степени свободы относительно вала. Предусмотрена приводная система, которая соединена с разъемом, для того чтобы приводить в движение, по меньшей мере, один элемент, связанный, по меньшей мере, с одной степенью свободы исполнительного органа. С разъемом соединено схемное устройство, для того чтобы предоставлять для процессора сигнал, который указывает тип инструмента и диапазон перемещения исполнительного органа, по меньшей мере, в одной степени свободы.
Процессор рассчитан при этом таким образом, что он определяет тип инструмента и диапазон перемещения исполнительного органа инструмента, зафиксированного держателем инструмента, на основе сигнала, который предоставляется схемным устройством, которое соединено с разъемом хирургического роботизированного инструмента. Кроме того, сигнал сообщает срок службы инструмента и/или совокупное использование инструмента на основе измерения календарной даты, времени суток, количества хирургических процедур, количества случаев, в которых инструмент соединялся с системой, или количества приведений в действие исполнительного органа.
Из EP 2 298 219 B1 известен хирургический роботизированный инструмент для использования в хирургической роботизированной системе, которая имеет процессор, который направляет перемещение держателя инструмента. Инструмент включает в себя щуп, который имеет проксимальный конец и дистальный конец, хирургический исполнительный орган, который расположен рядом с дистальным концом щупа, и разъем, который расположен рядом с проксимальным концом щупа. При этом разъем включает в себя схему, которая размещена в щупе и которая посылает сигнал через разъем на процессор. Инструмент отличается тем, что сигнал определяет сдвиги калибровки инструмента между нормальным относительным положением участка приводной системы и хирургического исполнительного органа и измеренным относительным положением участка приводной системы и хирургического исполнительного органа.
Сигнал включает в себя уникальные данные опознавания инструмента или сообщает, по меньшей мере, срок службы инструмента и совокупное использование инструмента на основе измерения календарной даты, времени суток, количества хирургических вмешательств, количества процессов соединения, при которых инструмент соединялся с системой, или количества приведений в действие исполнительного органа.
EP 2 363 091 B1 раскрывает хирургическую роботизированную систему с хирургическим инструментом, манипулятором-роботом с держателем инструмента, к которому может разъемно присоединяться хирургический инструмент. Манипулятор-робот рассчитан так, чтобы манипулировать хирургическим инструментом таким образом, что хирургический инструмент перемещается, и имеет процессор для управления манипулятором-роботом, так что он управляет движением хирургического инструмента. Хирургический инструмент имеет щуп с проксимальным и дистальным концом, хирургический исполнительный орган, который расположен рядом с дистальным концом щупа, разъем, который расположен рядом с проксимальным концом щупа, причем разъем может разъемно соединяться с держателем инструмента, и схему, которая смонтирована в щупе.
Схема определяет при этом сигнал для передачи на процессор, для того чтобы указывать совместимость инструмента с системой, причем сигнал включает в себя уникальные идентификационные данные и зашифрованную последовательность данных верификации, которая рассчитывается из уникальных идентификационных данных по алгоритму. При этом процессор рассчитан для приема сигнала от инструмента, если он соединен с держателем инструмента, для манипулирования уникальными идентификационными данными с помощью алгоритма, для того чтобы создавать данные подтверждения, для сопоставления данных подтверждения с зашифрованной последовательностью данных верификации, для того чтобы верифицировать совместимость инструмента с хирургической роботизированной системой, и для допуска того, что хирургическая роботизированная система манипулирует инструментом, если данные подтверждения соответствуют зашифрованной последовательности данных верификации.
Сверх этого, в частности в отношении инструментов, которые предназначены лишь для использования при одной единственной операции, так называемых одноразовых инструментов, существует потребность обеспечивать соблюдение требований стерильности для хирургических инструментов.
Исходя из этого, в основе изобретения лежит задача предоставить способ и хирургическую роботизированную систему, посредством которых недозволенное использование хирургического инструмента, включая непреднамеренное многократное использование такого инструмента, может исключаться. В частности, должно исключаться многократное использование одноразового инструмента, который уже был использован в медицинской операции. Также должно исключаться использование хирургического инструмента, если, по меньшей мере, один задаваемый параметр инструмента не имеет запрашиваемого значения устройства или не выдерживает допустимое значение устройства.
Изобретение решает эту задачу с помощью способа с признаками пункта 1 формулы изобретения и с помощью хирургической роботизированной системы с признаками пункта 9 формулы изобретения.
Согласно первому аспекту изобретение предусматривает способ контроля допуска используемого в хирургической роботизированной системе хирургического инструмента с памятью данных, в которой сохранены первые данные с первой информацией о хирургическом инструменте и вторые данные с информацией, по меньшей мере, об одном критерии совместимости хирургической роботизированной системы по отношению к хирургическому инструменту. При этом способе хирургический инструмент соединяется с хирургической роботизированной системой, первые данные считываются из памяти данных, и при помощи содержащейся в первых данных первой информации проверяется, подходит ли хирургический инструмент для применения в хирургической роботизированной системе. В случае, если при проверке устанавливается пригодность хирургического инструмента для использования в хирургической роботизированной системе, вторые данные считываются из памяти данных, и при помощи содержащейся во вторых данных второй информации проверяется, соответствует ли по меньшей мере один критерий совместимости по меньшей мере одному предварительно сохраненному в хирургической роботизированной системе условию совместимости. Далее хирургический инструмент допускается при способе к использованию хирургической роботизированной системой только в том случае, если критерий совместимости соответствует по меньшей мере одному предварительно сохраненному условию совместимости. Вследствие этого может обеспечиваться и то, что инструмент в целом подходит для роботизированной системы, то есть совместим, и то, что инструмент может использоваться только при одной единственной операции, так что тот же инструмент не может использоваться при операции другого пациента, ни ошибочно, ни умышленно.
Согласно второму аспекту изобретение предусматривает хирургическую роботизированную систему, по меньшей мере, с одним манипулятором для перемещения и/или приведения в действие хирургического инструмента, который предназначен в частности для использования при одной единственной операции, с блоком управления для управления манипулятором, с устройством считывания и записи для считывания и записи данных памяти данных хирургического инструмента. При этом устройство считывания и записи выполнено таким образом, чтобы с учетом соединения хирургического инструмента с роботизированной системой считывать из памяти данных первые данные с первой информацией о хирургическом инструменте и передавать их на блок управления.
Хирургическая роботизированная система отличается тем, что память данных хирургического инструмента содержит вторые данные с информацией, по меньшей мере, об одном критерии совместимости хирургической роботизированной системы по отношению к хирургическому инструменту, что устройство считывания и записи выполнено таким образом, чтобы с учетом соединения хирургического инструмента с роботизированной системой считывать из памяти данных, по меньшей мере, первые данные и передавать их на блок управления, и что блок управления выполнен таким образом, чтобы при помощи содержащейся в первых данных первой информации проверять, подходит ли хирургический инструмент для применения в хирургической роботизированной системе. Далее хирургическая роботизированная система отличается тем, что устройство считывания и записи считывает вторые данные из памяти данных и передает их на блок управления, если блок управления установил при проверке пригодность хирургического инструмента для применения в хирургической роботизированной системе. Кроме того, хирургическая роботизированная система отличается тем, что блок управления выполнен таким образом, чтобы, исходя из содержащейся во вторых данных второй информации, проверять, соответствует ли по меньшей мере один критерий совместимости по меньшей мере одному предварительно сохраненному в блоке управления условию совместимости, и что блок управления допускает хирургический инструмент к использованию хирургической роботизированной системой только в том случае, если критерий совместимости соответствует по меньшей мере одному предварительно сохраненному условию совместимости.
Роботизированная система и соответственно блок управления роботизированной системы может выполнять по существу шаги способа согласно пункту 1 формулы изобретения, для того чтобы обеспечивать и то, что инструмент в целом подходит для роботизированной системы, то есть совместим, и то, что инструмент может использоваться только при одной единственной операции, так что тот же инструмент не может использоваться при операции другого пациента, ни ошибочно, ни умышленно.
Таким образом, способ согласно первому аспекту и роботизированная система согласно второму аспекту имеют преимущество обеспечивать при хирургических операциях или вмешательствах совместимость используемых при них, хирургических инструментальных блоков или инструментов. Далее изобретение обеспечивает то, что хирургические инструментальные блоки или инструменты могут использоваться и в соответствии с релевантными для продукта спецификациями, и в соответствии с необходимыми критериями стерильности.
Роботизированная система согласно второму аспекту может усовершенствоваться таким же образом, как и способ согласно пункту 1 формулы изобретения, в частности признаками зависимых пунктов формулы изобретения. Также способ согласно пункту 1 формулы изобретения может усовершенствоваться признаками роботизированной системы, в частности признаками зависимых пунктов формулы изобретения.
В варианте осуществления вторые данные включают в себя заполнитель информации для дополнения метки идентификации операции. Заполнитель информации может быть выполнен в простом исполнении в виде зарезервированной памяти. В качестве условия совместимости проверяется, имеется ли заполнитель информации во вторых данных. Далее критерий совместимости включает в себя задаваемую роботизированной системой метку идентификации операции, системную метку идентификации операции, для однозначной идентификации единственной операции, при которой должен использоваться хирургический инструмент. Заданная роботизированной системой системная метка идентификации операции сохраняется в области заполнителя информации вторых данных как инструментальная метка идентификации операции.
В другом варианте осуществления сам заполнитель информации представляет собой предварительный критерий совместимости или включает в себя предварительный критерий совместимости. В этом случае в качестве условия совместимости может проверяться наличие предварительного критерия совместимости.
Далее в качестве условия совместимости может проверяться соответствие заданной хирургической роботизированной системой системной метки идентификации операции с содержащейся во вторых данных в качестве критерия совместимости инструментальной меткой идентификации операции.
Кроме того, первые данные могут включать в себя идентифицирующий хирургический инструмент, по меньшей мере, в отношении его функции серийный номер, дату изготовления и/или максимальное время хранения хирургического инструмента или дату окончания срока хирургического инструмента, причем проверяется, было ли превышено максимальное время хранения или дата окончания срока.
Кроме того, первые или вторые данные или и первые, и вторые данные могут включать в себя контрольную сумму для их верификации. При помощи контрольной суммы может проверяться, были ли данные переданы без повреждений, правильно считаны и не были ли изменены.
Также первые или вторые данные или и первые, и вторые данные могут сохраняться и/или передаваться в зашифрованном виде. Шифрование служит для безопасности данных. Также возможно, что первые и/или вторые данные снабжаются защитой записи, причем защита записи вторых данных предпочтительно активируется после сохранения системной метки идентификации операции, причем защита записи предпочтительно не может больше деактивироваться после активации. Благодаря защите записи эффективно предотвращается манипулирование данными. Вследствие этого может обеспечиваться, что в памяти данных хирургического инструмента постоянно хранятся подходящие данные для его описания и идентификации. Устройство считывания и записи выполнено в этом варианте осуществления соответствующей изобретению хирургической роботизированной системы для расшифровки и шифрования первых и/или вторых данных.
В дальнейшем исполнении первые данные включают в себя информацию с предварительным критерием совместимости. Она может быть реализована посредством задающих соответствующую область памяти бинарных кодов. Однако также возможно, что информация с предварительным критерием совместимости адаптирована, по меньшей мере, в своей структуре данных к информации с критерием совместимости или равна ей.
В предпочтительном варианте осуществления блок управления сохраняет предварительно сохраненную системную метку идентификации операции как инструментальную метку идентификации операции во вторых данных, если при проверке во вторых данных не обнаруживается информация о конкретной операции.
Альтернативно или дополнительно блок управления соответствующей изобретению хирургической роботизированной системы может сохранять предварительно сохраненную системную метку идентификации операции во вторых данных как инструментальную метку идентификации операции, если при проверке данных в памяти данных обнаруживается лишь заполнитель информации.
Таким образом, может обеспечиваться то, что хирургический инструментальный блок или хирургический инструмент используется только для одной единственной, однозначно идентифицированной, хирургической операции.
В случае предназначенного для использования при одной единственной операции хирургического инструментального блока или одноразового инструмента сохранение созданной роботизированной системой системной метки идентификации операции как инструментальной метки идентификации операции в памяти данных инструментального блока или инструмента означает, что инструментальный блок или инструмент отвергается при каждой дальнейшей, подтвержденной отличающейся системной меткой идентификации операции, хирургической операции. Системная метка идентификации операции может состоять предпочтительно из алфавитно-цифровых символов. Однако в качестве системной метки идентификации операции также возможна последовательность чисел.
Следовательно, хирургический инструментальный блок или хирургический инструмент маркируется роботизированной системой или блоком управления высокого уровня таким образом, что он не может соединяться и использоваться в другой операции с роботизированной системой.
При проверке допустимости хирургического инструментального блока или хирургического инструмента результатом проверки может быть маркирование хирургического инструментального блока или хирургического инструмента системной меткой идентификации конкретной операции. То есть хирургический инструментальный блок или хирургический инструмент может блоком управления или роботизированной системой высокого уровня соединяться во время процесса операции с роботизированной системой, использоваться, снова отсоединяться и снова соединяться.
Память данных может считываться при помощи устройства считывания и записи роботизированной системы. Оценка данных осуществляется блоком управления роботизированной системы. Результат оценки может заключаться в том, что хирургический инструментальный блок или хирургический инструмент еще не использовался в операции, или что время хранения меньше, чем максимально заданный срок хранения, так что использование хирургического инструментального блока или хирургического инструмента может допускаться роботизированной системой или блоком управления.
Первые или вторые данные или и первые, и вторые данные могут содержать заполнитель информации. Заполнитель информации может также создаваться из других, содержащихся в первых и/или вторых данных, дальнейших данных инструмента при помощи алгоритма.
Далее вторые данные могут наряду с заполнителем информации включать в себя также описывающую хирургический инструментальный блок или хирургический инструмент информацию, такую как описывающую инструмент в отношении его функции, как например ножницы, захват, диссектор и тому подробное, информацию, дату изготовления и/или максимальное время хранения. Таким образом, в этом случае может предпочтительно достигаться избыточность в отношении данных.
В усовершенствовании первые данные снабжены защитой записи, сохранены в допускающей только однократную запись памяти или памяти, допускающей только чтение (ROM).
В предпочтительном варианте осуществления блок управления выполнен таким образом, чтобы первые данные считывать и/или принимать, а также проверять первые данные.
Дальнейший вариант осуществления отличается тем, что проверочное устройство для проверки хирургического инструмента сохраняет первые и/или вторые данные в памяти данных хирургического инструментального блока.
Так, например, при происходящей в конце процесса изготовления хирургического инструментального блока или хирургического инструмента окончательной проверке в соответствующем проверочном устройстве может генерироваться уникальный для хирургического инструментального блока и/или хирургического инструмента серийный номер, который вместе с дальнейшей информацией, такой как дата изготовления, максимальное время хранения или дата окончания срока, сохраняется в первых данных. При сохранении первые данные снабжаются контрольной суммой, шифруются и сохраняются в присвоенной им области данных памяти данных в хирургическом инструментальном блоке. После процесса сохранения первых данных область данных для первых данных, как правило, снабжается защитой записи.
Равным образом во вторых данных памяти данных могут сохраняться заполнители информации для системной метки идентификации операции. При этом речь может идти, например, о последовательности двоичных чисел из нулей или единиц. Предпочтительно в заполнителе информации или же в качестве заполнителя информации может сохраняться предварительный критерий совместимости. Такой предварительный критерий совместимости еще не включает в себя ту же информацию, как и задаваемая роботизированной системой или предварительно в ней сохраненная системная метка идентификации операции, однако имеет, по меньшей мере, такую же архитектуру структуры данных.
Например, в рамках окончательной проверки наряду с содержащимися в памяти данных заполнителями информации могут сохраняться в качестве вторых данных далее предпочтительно серийный номер и дальнейшая информация, такая как дата изготовления, максимальное время хранения или дата окончания срока хранения хирургического инструментального блока и/или хирургического инструмента. В этом случае может достигаться избыточность в отношении данных, описывающих хирургический инструментальный блок или хирургический инструмент. Повреждение данных или неправильное считывание, например, первых данных могло бы игнорироваться или корректироваться посредством содержащейся во вторых данных информации.
При способе или при роботизированной системе заполнитель информации может также содержаться в первых данных. В этом случае предварительный критерий совместимости может использоваться предпочтительно для аутентификации хирургического инструментального блока или хирургического инструмента при блоке управления роботизированной системы. Блок управления может рассчитывать для этого предварительный критерий совместимости при помощи алгоритма, например, из дальнейших, описывающих хирургический инструментальный блок или хирургический инструмент данных.
В дальнейшем варианте осуществления устройство считывания и записи выполнено таким образом, чтобы считывать описывающие хирургический инструментальный блок или хирургический инструмент первые данные из памяти данных при соединении хирургического инструментального блока или хирургического инструмента с роботизированной системой. Для этого считывание может осуществляться посредством приемопередающего устройства ближнего действия, как например RFID-блока считывания и записи, так что данные могут уже считываться, если хирургический инструментальный блок или хирургический инструмент был приведен в рамках подготовки операции в ближнюю зону роботизированной системы. Однако равным образом считывание данных может осуществляться также лишь после установления проводной линии связи с роботизированной системой или блоком управления.
В предпочтительном варианте осуществления первые данные включают в себя дату изготовления и максимальное время хранения или дату окончания срока. Блок управления выполнен в этом случае для того, чтобы проверять, истекло ли максимальное время хранения или дата окончания срока.
Как при соответствующем изобретению способе, так и при соответствующей изобретению роботизированной системе считывание или запись данных из или в память данных хирургического инструментального блока или хирургического инструмента может осуществляться посредством чипа радиочастотной идентификации (RFID-чипа или RFID-метки). Однако также возможно оптическое считывание и запись данных в рамках оптической передачи данных. Далее в проводном варианте может использоваться флэш-накопитель. По меньшей мере, первые данные могли бы также предоставляться в коде, таком как (QR)-коде быстрого отклика.
Для того чтобы как хирургический инструмент, так и хирургический инструментальный блок была возможность использовать лишь при одной единственной операции, оба могут иметь память данных, в которой предпочтительно с защитой записи сохраняется в каждом случае однозначно идентифицирующая операцию метка, системная метка S-OID идентификации операции, сохраненная как инструментальная метка I-OID идентификации операции. Вследствие этого после окончания операции, идентифицированной посредством системной или инструментальной метки идентификации операции, либо хирургический инструментальный блок, либо хирургический инструмент может исключаться из дальнейшей эксплуатации.
Дальнейшие признаки и преимущества проистекают из последующего описания, которое более подробно разъясняет изобретение на основе примеров осуществления в связи с приложенными, выполненными в различных масштабах фигурами чертежа. Показанные элементы изображены при этом частично упрощенно.
На чертеже показаны:
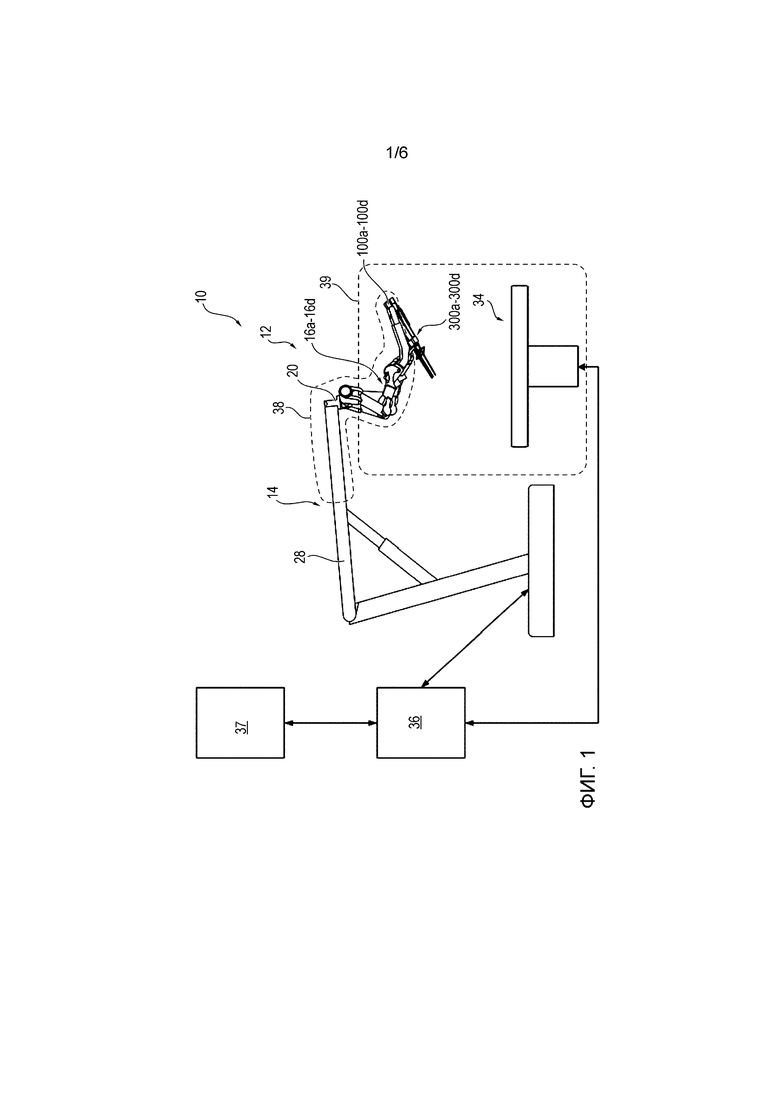
фиг. 1 - схематичное изображение роботизированной системы для роботизированной хирургии с манипулятором, который имеет четыре руки манипулятора, с которыми может в каждом случае соединяться стерильный блок инструментального блока;
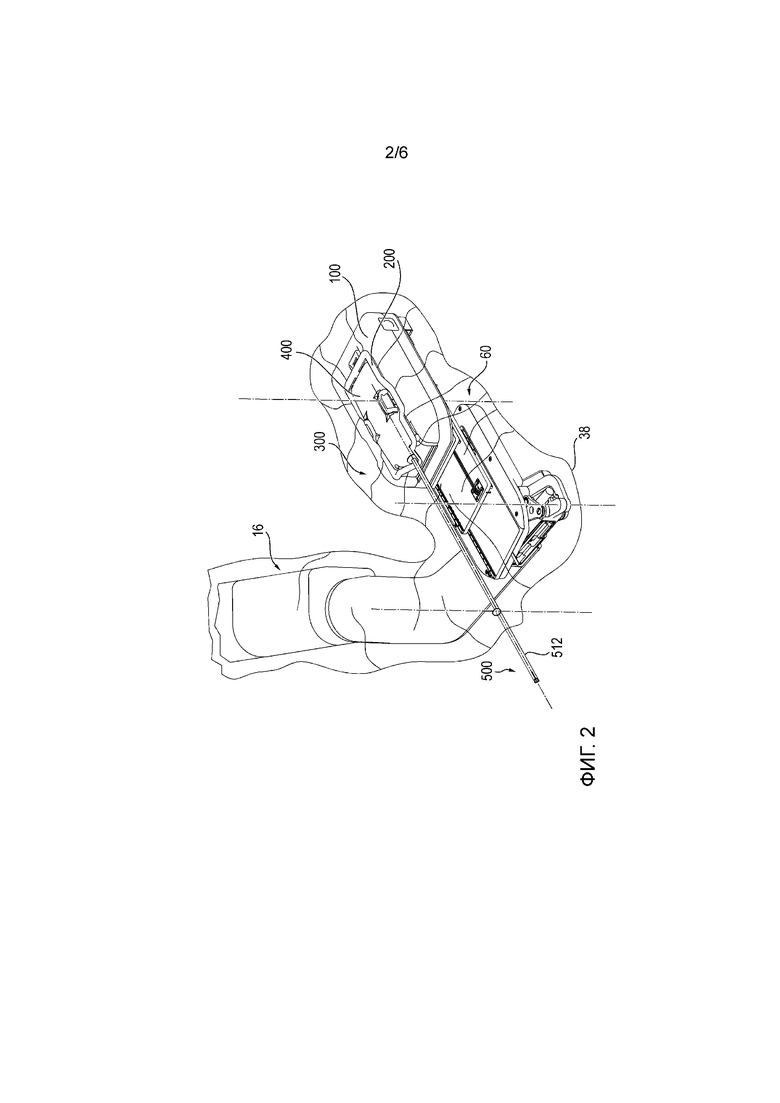
фиг. 2 - изображение в перспективе участка руки манипулятора с соединительным блоком для соединения руки манипулятора с имеющим стерильный блок инструментальным блоком, с соединенным с соединительным блоком стерильным шлюзовым затвором и с соединенным со стерильным шлюзовым затвором стерильным блоком инструментального блока;
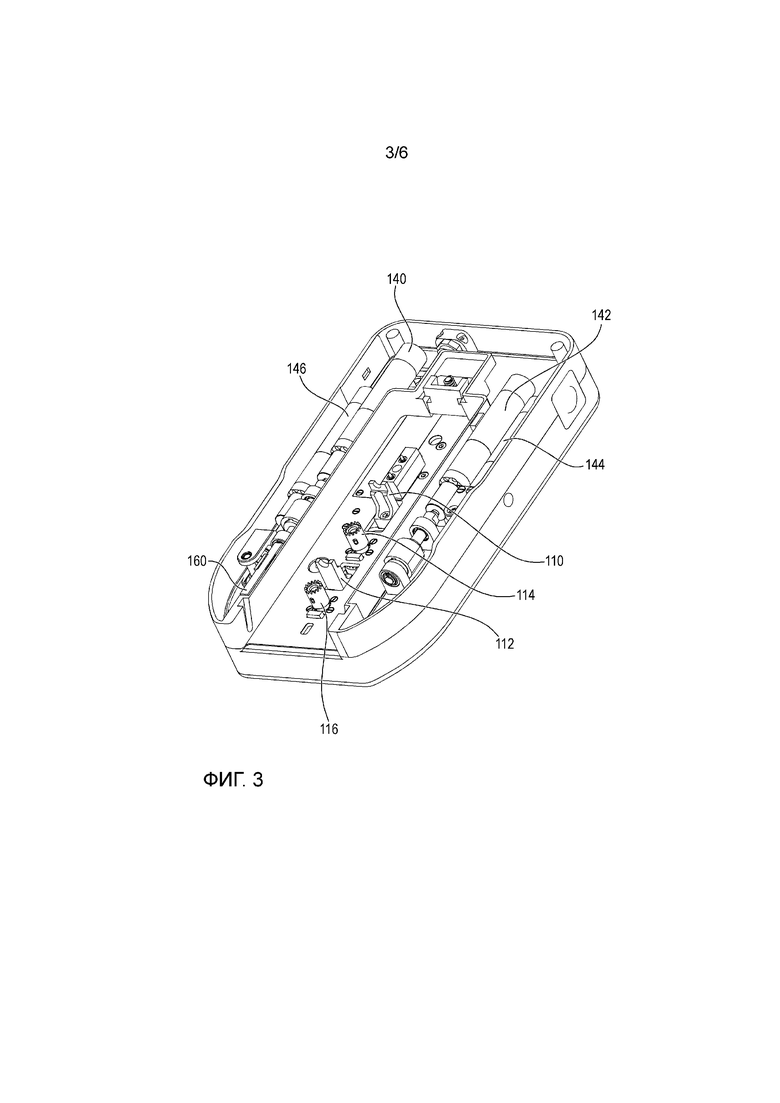
фиг. 3 - схематичное изображение соединительного блока руки манипулятора с удаленной верхней стороной корпуса;
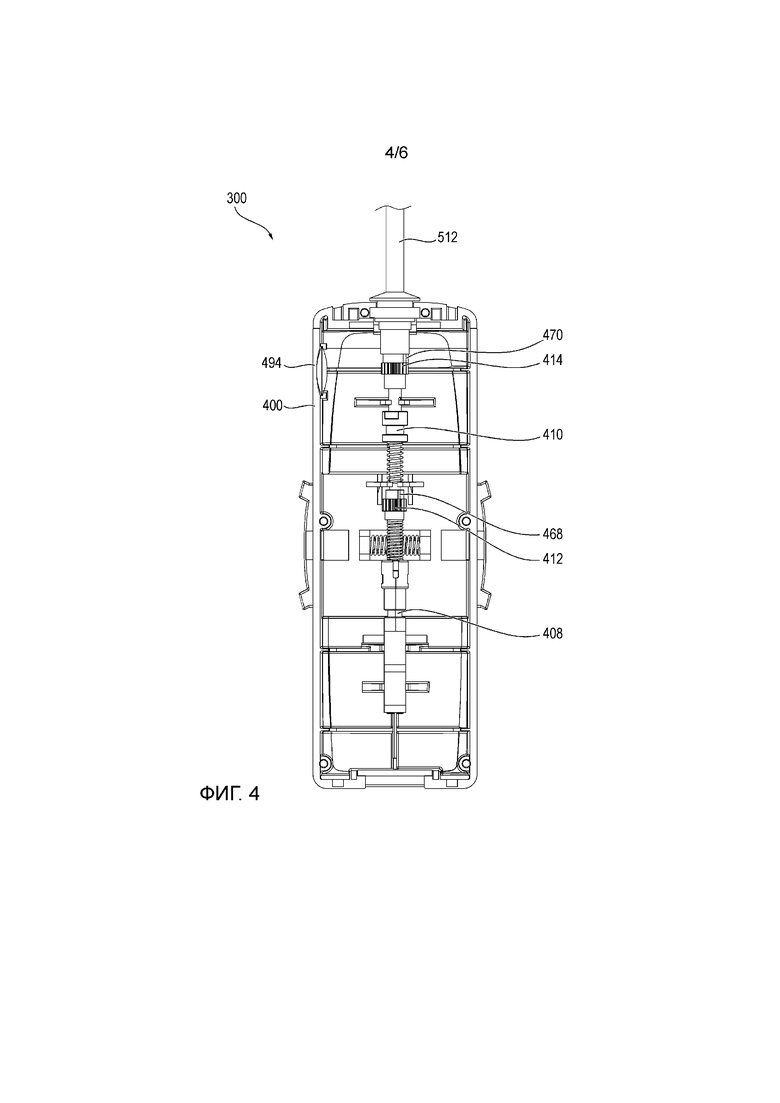
фиг. 4 - вид сверху на инструментальный блок с удаленной донной пластиной;
фиг. 5 - блок-схема последовательности для иллюстрации соответствующего изобретению способа и соответственно функции роботизированной системы; и
фиг. 6 - дальнейшая блок-схема последовательности для иллюстрации способа контроля допуска используемого в хирургической роботизированной системе хирургического инструмента, а также для иллюстрации функции роботизированной системы.
Фиг. 1 показывает схематичное изображение хирургической роботизированной системы 10 для использования в роботизированной хирургии. Роботизированная система 10 имеет манипулятор 12, который имеет штатив 14 и предпочтительно четыре руки 16a по 16d манипулятора. Каждая рука 16a по 16d манипулятора соединена со стерильным инструментальным блоком 300a по 300d через соединительный блок 100a по 100d руки 16a по 16d манипулятора.
Инструментальный блок 300a по 300d стерилен и включает в себя наряду с показанным на фиг. 2 стерильным блоком 400 для соединения инструментального блока 300a по 300d с соединительным блоком 100a по 100d руки 16a по 16d манипулятора хирургический инструмент 500, в частности с исполнительным органом, причем исполнительный орган может при помощи соединительного блока 100a по 100d руки 16a по 16d манипулятора перемещаться и/или приводиться в действие. Альтернативно хирургическому инструменту 500 инструментальный блок 300a по 300d может также включать в себя оптический инструмент, в частности эндоскоп, и/или медицинский прибор, в частности для введения медикамента, для выдачи промывной жидкости и/или для отсасывания промывной жидкости и/или секрета желез.
Манипулятор 12 управляется блоком 36 управления. Блок 36 управления соединен линией передачи данных и/или управления с блоком 37 ввода и вывода, который выдает в частности изображение операционного поля оператору в режиме реального времени при помощи, по меньшей мере, одного блока отображения блока 37 ввода и вывода. Оператор вводит входные данные, посредством которых инструментальные блоки 300a по 300d позиционируются и приводятся в действие во время операции пациента. Блок 37 ввода и вывода служит таким образом в качестве интерфейса "человек-машина".
Блок 36 управления соединен далее посредством линии передачи данных и/или управления с неизображенным блоком управления операционного стола 34. Благодаря этому соединению передачи данных и/или управления обеспечивается, что положение поверхности укладки пациента или сегментов поверхности укладки пациента операционного стола 34 может изменяться лишь в том случае, если это безопасно возможно благодаря позиционированию инструментальных блоков 300a по 300d для оперируемого пациента.
Операционный стол 34, а также инструментальные блоки 300a по 300d расположены в стерильной операционной области 39. Руки 16a по 16d манипулятора и штатив 14 не стерильны. Вдающиеся в стерильную операционную область 39 участки манипулятора 12, то есть руки 16a по 16d манипулятора, головка 20 штатива и часть руки 28 штатива, стерильно упакованы в обозначенную пунктирной линией стерильную гибкую оболочку 38, такую как стерильная пленка, так что они могут безопасно располагаться в стерильной операционной области 39. Блок 37 ввода и вывода расположен за пределами стерильной области 39 и потому не должен стерильно упаковываться.
При множестве операций инструментальные блоки 300a по 300d должны многократно заменяться во время операции в соответствии с ходом операции. Таким образом, между рукой 16a по 16d манипулятора и инструментальным блоком 300a по 300d стерильный разъем должен предусматриваться таким образом, что нестерильные части соединительного блока руки 16a по 16d манипулятора стерильно перекрыты даже после отсоединения инструментального блока 300a по 300d.
Сверх этого, загрязненные посредством контакта стерильных элементов соединительного блока руки 16a по 16d манипулятора элементы инструментального блока 300a по 300d должны после отсоединения инструментального блока 300a по 300d от руки 16a по 16d манипулятора стерильно перекрываться, чтобы инструментальный блок 300a по 300d мог откладываться в стерильной области 39, не загрязняя при этом дальнейшие элементы в стерильной области 39. Для этого между соединительным блоком 100a по 100d руки 16a по 16d манипулятора и инструментальным блоком 300a по 300d предусматривается стерильный шлюзовой затвор 200, который имеет, по меньшей мере, один шлюзовой клапан, который закрыт, если инструментальный блок 300a по 300d не соединен со стерильным шлюзовым затвором 200, так что в этом случае нестерильный соединительный блок 100a по 100d экранирован от стерильной области 39 гибкой стерильной оболочкой 38 и интегрированным в нее стерильным шлюзовым затвором от стерильной области 39.
На фиг. 2 показана часть руки 16a по 16d манипулятора с соединительным блоком 100a по 100d, а также соединенный с соединительным блоком 100a по 100d через стерильный шлюзовой затвор 200 инструментальный блок 300a по 300d. Так как последующее разъяснение для рук 16a по 16d манипулятора и инструментальных блоков 300a по 300d одинаково, на них ссылаются под ссылочными позициями 16 и 300. Соответственно фиг. 2 показывает изображение в перспективе участка руки 16 манипулятора с соединительным блоком 100 для соединения руки 16 манипулятора с включающим в себя стерильный блок 400 и инструмент 500 инструментальным блоком 300. Для этого соединительный блок 100 соединен с интегрированным в стерильную оболочку 38 стерильным шлюзовым затвором 200. Стерильный шлюзовой затвор 200 может соединяться и снова отсоединяться как с соединительным блоком 100, так и со стерильным блоком 400. На фиг. 2 стерильный шлюзовой затвор 200 изображен соединенным как с соединительным блоком 100, так и со стерильным блоком 400. Соединительный блок 100 расположен на дистальном конце телескопической системы 60.
Фиг. 3 показывает соединительный блок 100 с удаленной верхней стороной корпуса. Соединительный блок 100 имеет в целом четыре приводных двигателя 140 по 146, которые выполнены в каждом случае в виде электродвигателей постоянного тока с тахометром, так что блок 36 управления в любой момент времени знает угол поворота соответствующего приводного двигателя 140 по 146 и может это учитывать при дальнейшем управлении. Первый приводной двигатель 140 соединен первой линейной соединительной передачей с первым линейным приводным элементом 110, который при активизации приводного двигателя 140 блоком 36 управления выполняет поступательное приводное движение. Второй приводной двигатель 142 соединен второй линейной соединительной передачей со вторым линейным приводным элементом 112, так что при приводном движении второго приводного двигателя 142 второй линейный приводной элемент 112 выполняет поступательное приводное движение. Третий приводной двигатель 144 соединен первой редукторной ступенью с первым вращательным приводным элементом 114, так что при приводном движении третьего приводного двигателя 144 первый вращательный приводной элемент 114 вращается. Четвертый приводной двигатель 146 соединен второй редукторной ступенью со вторым вращательным приводным элементом 116, так что он при приводном движении четвертого приводного двигателя 146 выполняет вращательное движение.
Фиг. 4 показывает инструментальный блок 300, у которого была удалена неизображенная донная пластина стерильного блока 400. Несколько элементов 408 по 414 приводятся в движение приводными элементами 110 по 116 соединительного блока 100. Выполненный в виде зубчатого колеса, второй, приводимый во вращательное движение элемент 414 соединен без возможности поворота с внешним телом 512 инструмента и вторым датчиком 470 угла для обнаружения вращения внешнего тела 512 инструмента.
Второй приводимый в поступательное движение элемент 410 соединен с первым внутренним телом инструмента, так что при поступательном движении второго приводимого в поступательное движение элемента 410 первое внутреннее тело инструмента двигается поступательно.
Первый приводимый во вращательное движение элемент 412 соединен без возможности поворота с первым датчиком 468 угла и вторым внутренним телом инструмента. Второе внутреннее тело инструмента служит для вращения исполнительного органа вне зависимости от угла поворота внешнего тела 512 инструмента. Первое внутреннее тело инструмента служит для отклонения исполнительного органа. Исходя из роботизированной системы 10, в дальнейшем описывается функция контроля допуска использованных при операции пациента инструментальных блоков 300.
Показанный на фиг. 4 хирургический инструментальный блок 300 снабжен памятью 494 данных, которая предпочтительно выполнена в виде чипа радиочастотной идентификации (RFID-чипа). Память 494 данных записывается во время изготовления хирургического инструментального блока 300 при проверке хирургического инструментального блока 300 на неизображенном испытательном стенде данными. Если проверка на функциональную пригодность прошла положительно, то генерируются серийный номер, дата изготовления, номер партии и/или номер выпуска, и данные с этой информацией сохраняются в памяти 494 данных. Сохраненные данные могут помимо этого включать в себя информацию о типе инструмента, максимальном времени хранения и/или информацию о том, что хирургический инструмент еще не был использован при медицинской операции.
Во время происходящей предпочтительно в рамках процесса изготовления конечной проверки хирургического инструментального блока 300 или хирургического инструмента 500 генерируется для каждого инструментального блока 300 или для каждого инструмента 500 уникальный серийный номер SNo, и он вместе с, по меньшей мере, одной дальнейшей информацией, такой как серия Lot продукции или максимальное время SL хранения, объединяется в первом блоке IB1 информации. Первый блок IB1 информации снабжается контрольной суммой, шифруется и сохраняется в присвоенной блоку IB1 информации области данных памяти 494 данных в хирургическом инструментальном блоке 300. Область данных для блока IB1 информации снабжается после записи защитой записи.
Для использования инструментального блока 300 или хирургического инструмента 500 в сочетании с хирургической роботизированной системой 10 устройство 160 считывания и записи считывает данные из памяти 494 данных. Считанные данные передаются на блок 36 управления роботизированной системы 10 и оцениваются им. Оценка должна гарантировать, что хирургический инструментальный блок 300 или хирургический инструмент 500 еще не использовался в другой хирургической операции, и что время хранения находится в пределах допущенной границы. Соответственно использование хирургического инструментального блока 300 или хирургического инструмента 500 может допускаться блоком 36 управления роботизированной системы 10. Блок 36 управления сохраняет в памяти 494 данных хирургического инструментального блока 300 инструментальную метку идентификации операции, посредством которой обеспечивается, что инструментальный блок 300 во время одной и той же операции может сколь угодно часто соединяться с роботизированной системой 10, использоваться и отсоединяться, однако не при другой операции. Предпочтительно роботизированная система 10 генерирует системную метку идентификации операции, которая предпочтительно уникальна, действительна только для одной единственной операции и во время операции служит на инструменте в качестве инструментальной метки идентификации операции.
В частности, в памяти 494 данных сохраняются в зашифрованном виде, по меньшей мере, два блока IB1, IB2 информации. Первый блок IB1 информации включает в себя, например, контрольную сумму CHK первого блока IB1 информации, серийный номер SNo, серию Lot продукции и максимальное время SL хранения.
Блок IB2 информации может включать в себя по меньшей мере одну уникальную метку OID идентификации операции или заполнитель OIDP информации и/или контрольную сумму CHK второго блока IB2 информации, серийный номер SNo, серию Lot продукции, максимальное время SL хранения и/или дальнейшую информацию. Заполнитель OIDP информации может в зависимости от его структуры представлять собой или содержать предварительный критерий совместимости.
Сохраненный в памяти 494 данных заполнитель OIDP информации может включать в себя также уникальную метку OID идентификации операции, в частности инструментальную метку I-OID идентификации операции. Созданная роботизированной системой 10 и сохраненная в блоке 36 управления уникальная метка идентификации операции обозначается также как системная метка S-OID идентификации операции.
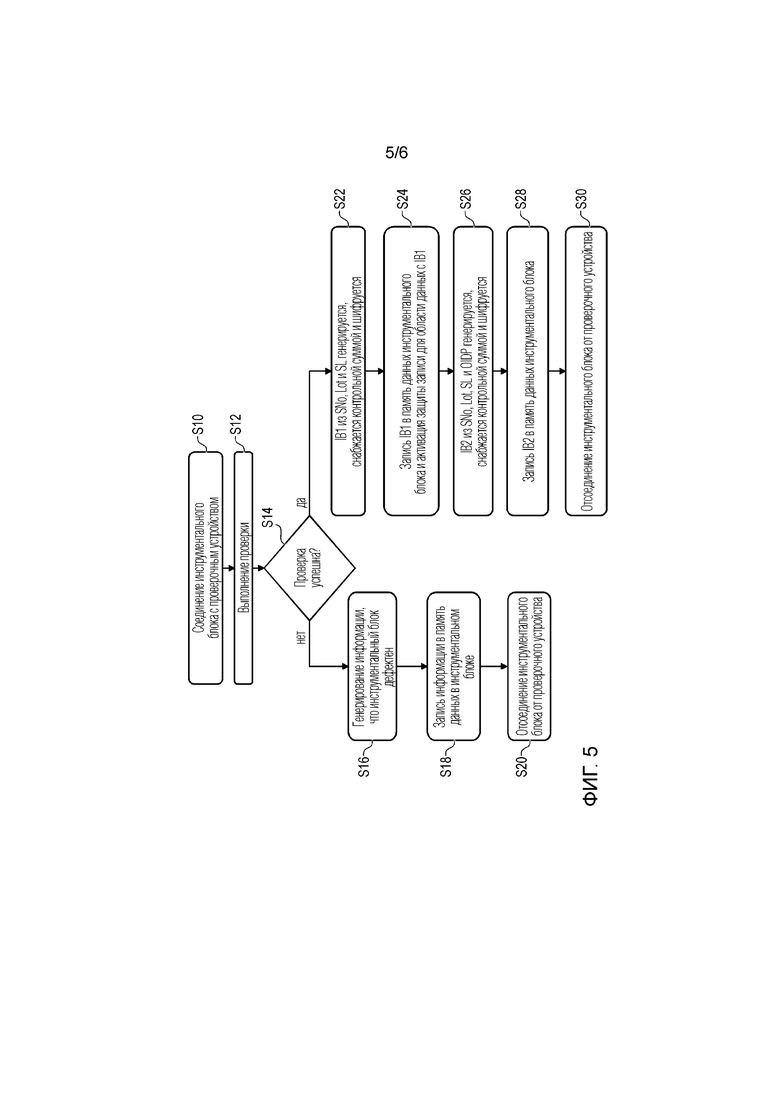
Фиг. 5 показывает блок-схему последовательности для иллюстрирования соответствующего изобретению способа или функции роботизированной системы 10. На шаге S10 хирургический инструментальный блок 300 соединяется с непоказанным проверочным устройством, которое на шаге S12 выполняет проверку инструментального блока 300 на его пригодность к использованию. При этом проверочное устройство проверяет затем на шаге S14 хирургический инструментальный блок 300 или хирургический инструмент 500, пригоден ли он функционально, правильно ли установлены все конструктивные элементы, и соответствует ли инструментальный блок 300 или инструмент 500 необходимым для клинического использования условиям чистоты или стерильности. Это включает в себя ту проверку, что, говоря об используемом хирургическом инструментальном блоке 300 или инструменте 500, речь идет о еще не использованном при другой операции инструментальном блоке 300 или инструменте 500.
Если при проверке согласно шагу S14 получается, что хирургический инструментальный блок 300 или хирургический инструмент 500 не обладает требуемой функциональной пригодностью и/или необходимой стерильностью, хирургический инструментальный блок 300 или инструмент 500 классифицируется на шаге S16 как дефектный. Соответствующая информация сохраняется затем на шаге S18 в памяти 494 данных инструментального блока 300. Соответственно хирургический инструментальный блок 300 или инструмент 500 отбраковывается после отсоединения от проверочного устройства на шаге S20.
Если же результат проверки на шаге S14 хирургического инструментального блока 300 или хирургического инструмента 500 проверочным устройством положителен, на шаге S22 данные с блоком IB1 информации из серийного номера SNo, серии Lot продукции и максимального времени SL хранения генерируются, снабжаются контрольной суммой и шифруются. Затем на шаге S24 данные с блоком IB1 информации записываются в память 494 данных хирургического инструментального блока 300, и активируется защита записи для области данных, в которой находятся данные с блоком IB1 информации. Далее на шаге S26 данные с блоком IB2 информации из заполнителя OIDP информации генерируются, снабжаются контрольной суммой и шифруются. Кроме того, второй блок IB2 информации может включать в себя дополнительную информацию, такую как серийный номер SNo, серию Lot продукции и максимальное время SL хранения. Затем на шаге S28 данные с блоком IB2 информации записываются в память 494 данных хирургического инструментального блока 300. После этого хирургический инструментальный блок 300 отсоединяется на шаге S30 от проверочного устройства.
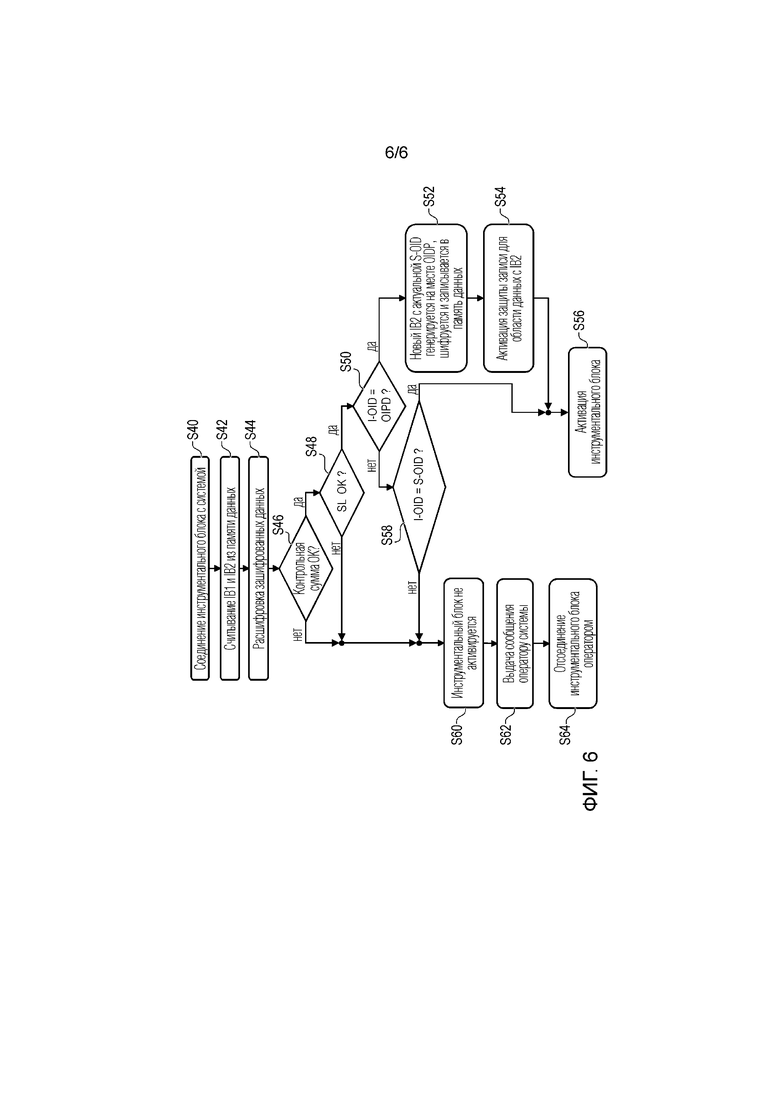
Фиг. 6 показывает дальнейшую блок-схему последовательности для иллюстрирования способа контроля допуска используемого в хирургической роботизированной системе 10 хирургического инструмента, а также для иллюстрации функции роботизированной системы 10.
Проверенный, как описано при помощи фиг. 5, хирургический инструментальный блок 300 соединяется при последовательности согласно фиг. 6 на шаге S40 с роботизированной системой 10. Первые данные с блоком IB1 информации и вторые данные с блоком IB2 информации считываются на шаге S42 из памяти 494 данных, и зашифрованные первые и вторые данные расшифровываются на шаге S44. Если проверка на шаге S46 показывает, что контрольная сумма соответствует ожидаемому значению, то на шаге S48 проверяется далее, не превышено ли еще максимальное время SL хранения. Если эта проверка на шаге S48 показывает, что максимальное время SL хранения еще не истекло, то на шаге S50 проверяется далее, идет ли, говоря о содержащейся в данных инструментальной метке I-OID идентификации операции, речь о заполнителе OIDP информации. Если это так, это означает, что хирургический инструментальный блок 300 еще не использовался при операции или хирургическом вмешательстве. После этого на шаге S52 данные с новым блоком IB2 информации с актуальной, сгенерированной роботизированной системой 10, то есть блоком 36 управления, уникальной системной меткой S-OID идентификации операции генерируются, шифруются и записываются в качестве вторых данных в память 494 данных хирургического инструментального блока 300. В дальнейшем на шаге S54 активируется защита записи для области данных блока IB2 информации. Таким образом, в сгенерированном заново блоке IB2 информации заполнитель OIDP информации был заменен системной меткой S-OID идентификации операции и служит после сохранения сгенерированного заново блока IB2 информации в качестве инструментальной метки I-OID идентификации операции. Затем хирургический инструментальный блок 300 активируется на шаге S56 для использования роботизированной системой 10.
Однако если при проверке на шаге S50 устанавливается, что содержащаяся в данных инструментальная метка I-OID идентификации операции не является заполнителем OIDP информации, то на шаге S58 затем проверяется далее, совпадает ли инструментальная метка I-OID идентификации операции с системной меткой S-OID идентификации операции.
В случае если инструментальная метка I-OID идентификации операции совпадает с системной меткой S-OID идентификации операции, хирургический инструментальный блок 300 или инструмент 500 активируется для использования роботизированной системой 10 на шаге S56. Этот случай имеет место, например, при применении хирургического инструментального блока 300 или хирургического инструмента 500 в роботизированной системе 10 при операции, если во время операции инструментальные блоки 300 должны меняться, то есть хирургический инструментальный блок 300 или хирургический инструмент 500 остается непостоянно соединенным или связанным с роботизированной системой, а на один или несколько промежутков времени отсоединяется от роботизированной системы 10 и снова соединяется с ней. В таком случае в памяти 494 данных хирургического инструментального блока 300 уже сохранена индивидуально сгенерированная для актуальной операции системная метка S-OID идентификации операции во втором блоке IB2 информации памяти 494 данных как инструментальная метка I-OID идентификации операции. Этот случай может наступать в частности вследствие того, что все предусмотренные для запланированной операции инструментальные блоки соединяются при подготовке операции с руками 16 манипулятора.
Если сохраненная в памяти 494 данных, уникальная инструментальная метка I-OID идентификации операции не совпадает со сгенерированной роботизированной системой 10, уникальной системной меткой S-OID идентификации операции, то хирургический инструментальный блок 300 на шаге S60 не активируется для использования роботизированной системой 10. Далее на шаге S62 выдается сообщение оператору или пользователю роботизированной системы 10. Затем на шаге S64 хирургический инструментальный блок 300 отсоединяется оператором или пользователем от соединительного блока 100 роботизированной системы 10. Кроме того, блоком 36 управления предотвращается приведение в действие руки 16 манипулятора, с которой соединен этот инструментальный блок 300.
Шаги S60 по S64 выполняются также в том случае, если при проверке на шаге S46 определяется неправильная контрольная сумма, или если при проверке на шаге S48 устанавливается, что максимальное время SL хранения уже истекло.
При первом использовании хирургического инструментального блока 300 в роботизированной системе 10, после соединения хирургического инструментального блока 300 первые данные с первым блоком IB1 информации и вторые данные со вторым блоком IB2 информации считываются из памяти 494 данных и дешифруются. Далее при помощи контрольной суммы проверяется достоверность данных. При положительной проверке проверяется содержимое, идентичны ли избыточные показания об устройстве обоих блоков IB1 и IB2 информации. Далее проверяется, не истекло ли еще максимальное время SL хранения, и не был ли еще использован хирургический инструментальный блок 300 или инструмент 500 при операции.
Если эта проверка показывает, что инструментальный блок 300 еще не был использован при операции, то сгенерированная роботизированной системой 10 системная метка S-OID идентификации операции еще не может быть сохранена в соответствующей области блока IB2 информации как инструментальная метка I-OID идентификации операции. Вторые данные с блоком IB2 информации генерируются затем заново с использованием действительной в текущий момент, сгенерированной роботизированной системой 10, уникальной метки S-OID идентификации операции, снабжаются контрольной суммой, шифруются и сохраняются в памяти 494 данных. Затем активируется защита записи для области данных блока IB2 информации в памяти 494 данных. Вследствие этого достигается то, что область данных со вторым данными блока IB2 информации может еще лишь считываться. После этого соединенный инструментальный блок 300 активируется для текущей предстоящей операции.
В случае повторного применения сконфигурированного таким образом, хирургического инструментального блока 300 в хирургической роботизированной системе 10, после соединения хирургического инструментального блока 300 первые данные с блоком IB1 информации и вторые данные с блоком IB2 информации считываются из памяти 494 данных и дешифруются. При помощи контрольной суммы проверяется, достоверны ли данные. Если проверка положительна, выполняется проверка, идентичны ли соответствующие друг другу данные обоих блоков IB1 и IB2 информации.
Далее проверяется, не истекло ли еще максимальное время SL хранения, и не был ли инструментальный блок 300 или инструмент 500 еще использован. Если хирургический инструментальный блок 300 или инструмент 500 уже был использован, то сохраненная в инструментальном блоке 300, уникальная, инструментальная метка I-OID идентификации операции сравнивается со сгенерированной роботизированной системой 10, уникальной, системной меткой S-OID идентификации операции.
Если системная метка S-OID идентификации операции и инструментальная метка I-OID идентификации операции совпадают, то хирургический инструментальный блок 300 допускается к использованию блоком 36 управления. Если же созданная в роботизированной системе 10, уникальная, системная метка S-OID идентификации операции не совпадает с сохраненной в хирургическом инструментальном блоке 300, уникальной, инструментальной меткой I-OID идентификации операции, то хирургический инструментальный блок 300 не допускается к использованию, и пользователь информируется об этом. Вследствие этого предотвращается, что хирургический инструментальный блок 300 или хирургический инструмент 500, который уже использовался при операции, маркированной инструментальной меткой I-OID идентификации операции, используется снова для другой операции.
Памятью 494 данных может быть память данных RFID-чипа, которая может записываться и считываться RFID-устройством считывания и записи. В других вариантах осуществления инструментальный блок 300 может включать в себя другие запоминающие устройства, которые служат в качестве памяти 494 данных, в частности считываемую и/или записываемую через WLAN или Bluetooth память.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
10 система
12 манипулятор
14 штатив
16, 16a по 16d рука манипулятора
20 головка штатива
28 рука штатива
34 операционный стол
36 блок управления
37 блок ввода и вывода
38 стерильная оболочка
39 стерильная операционная область
60 сегмент
100, 100a по 100d соединительный блок
110 первый линейный приводной элемент/линейная подъемная вилка
112 второй линейный приводной элемент/линейная подъемная вилка
114 первый вращательный приводной элемент/ведущая шестерня
116 второй вращательный приводной элемент/ведущая шестерня
140, 142, 144, 146 приводной двигатель
160 RFID-устройство считывания и записи
200 стерильный шлюзовой затвор
300, 300a по 300d инструментальный блок
400 стерильный блок
408 первый приводимый в поступательное движение элемент
410 второй приводимый в поступательное движение элемент
412 первый приводимый во вращательное движение элемент
414 второй приводимый во вращательное движение элемент
468 первый датчик угла
470 второй датчик угла
494 RFID-память данных
500 инструмент
512 внешнее тело инструмента
S10 по S64 шаги способа
IB1 первый блок информации
IB2 второй блок информации
OID метка идентификации операции
S-OID системная метка идентификации операции
I-OID инструментальная метка идентификации операции
OIDP заполнитель метки идентификации операции.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИИ | 2015 |
|
RU2635321C2 |
| УСТРОЙСТВО ДЛЯ РОБОТ-АССИСТИРОВАННОЙ ХИРУРГИИ | 2015 |
|
RU2704961C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИИ | 2016 |
|
RU2719919C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА | 2018 |
|
RU2741469C1 |
| Хирургическая роботизированная система и способ анализа производительности хирургической роботизированной системы | 2021 |
|
RU2796594C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА | 2019 |
|
RU2758753C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИИ, А ТАКЖЕ ПОЗИЦИОНИРУЮЩИЙ ВСПОМОГАТЕЛЬНЫЙ БЛОК | 2016 |
|
RU2719931C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА | 2017 |
|
RU2752456C2 |
| ХИРУРГИЧЕСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА И ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НЕЕ | 2018 |
|
RU2740114C1 |
Группа изобретений относится к медицине, а именно к хирургической роботизированной системе и способу контроля допуска используемого в хирургической роботизированной системе хирургического инструмента. Хирургическая роботизированная система выполнена с манипулятором для перемещения хирургического инструмента, с блоком управления для управления манипулятором и с устройством считывания и записи для считывания и записи данных памяти данных хирургического инструмента. Устройство считывания и записи выполнено таким образом, чтобы с учетом соединения хирургического инструмента с роботизированной системой считывать из памяти данных первые данные с первой информацией о хирургическом инструменте и передавать их на блок управления. Память данных хирургического инструмента содержит вторые данные с информацией по меньшей мере об одном критерии совместимости хирургической роботизированной системы по отношению к хирургическому инструменту. Устройство считывания и записи выполнено таким образом, чтобы с учетом соединения хирургического инструмента с роботизированной системой считывать из памяти данных по меньшей мере первые данные и передавать их на блок управления. Блок управления выполнен таким образом, чтобы при помощи содержащейся в первых данных первой информации проверять, подходит ли хирургический инструмент для применения в хирургической роботизированной системе. Устройство считывания и записи считывает вторые данные из памяти данных и передает их на блок управления, если блок управления установил при проверке пригодность хирургического инструмента для применения в хирургической роботизированной системе. Блок управления выполнен таким образом, чтобы исходя из содержащейся во вторых данных второй информации проверять, соответствует ли по меньшей мере один критерий совместимости по меньшей мере одному предварительно сохраненному в блоке управления условию совместимости. Блок управления допускает хирургический инструмент к использованию хирургической роботизированной системой только в том случае, если критерий совместимости соответствует по меньшей мере одному предварительно сохраненному условию совместимости. Достигается возможность исключения недозволенного использования хирургического инструмента, включая непреднамеренное многократное использование такого инструмента. 2 н. и 12 з.п. ф-лы, 6 ил.
1. Способ контроля допуска используемого в хирургической роботизированной системе (10) хирургического инструмента (500) с памятью (494) данных, в которой сохранены первые данные с первой информацией о хирургическом инструменте (500) и вторые данные с информацией по меньшей мере об одном критерии совместимости хирургической роботизированной системы (10) по отношению к хирургическому инструменту (500), при котором
хирургический инструмент (500) соединяют (S 40) с хирургической роботизированной системой (10),
первые данные считываются (S 42) из памяти (494) данных и при помощи содержащейся в первых данных первой информации проверяется, подходит ли (S 48) хирургический инструмент (500) для применения в хирургической роботизированной системе (10),
в случае если при проверке устанавливается пригодность хирургического инструмента (500) для использования в хирургической роботизированной системе (10), вторые данные считываются из памяти (494) данных, и при помощи содержащейся во вторых данных второй информации проверяется, соответствует ли по меньшей мере один критерий совместимости по меньшей мере одному предварительно сохраненному в хирургической роботизированной системе (10) условию совместимости, и
хирургический инструмент (500) допускают к использованию хирургической роботизированной системой (10) только в том случае, если критерий совместимости соответствует по меньшей мере одному предварительно сохраненному условию совместимости,
причем вторые данные включают в себя заполнитель (OIDP) информации для дополнения системной метки (S-OID) идентификации операции, в качестве условия совместимости проверяется, имеется ли заполнитель (OIDP) информации во вторых данных, в качестве критерия совместимости роботизированной системой (10) задается системная метка (S-OID) идентификации операции для однозначной идентификации единственной операции, при которой должен использоваться хирургический инструмент (500), и заданная системная метка (S-OID) идентификации операции сохраняется в области заполнителя (OIDP) информации вторых данных как инструментальная метка (I-OID) идентификации операции.
2. Способ по п. 1, отличающийся тем, что сам заполнитель (OIDP) информации представляет собой и/или включает в себя предварительный критерий совместимости, и в качестве условия совместимости проверяется наличие предварительного критерия совместимости.
3. Способ по п. 1 или 2, отличающийся тем, что в качестве условия совместимости проверяется соответствие заданной хирургической роботизированной системой (10) системной метке (S-OID) идентификации операции и содержащейся во вторых данных в качестве критерия совместимости инструментальной метке (I-OID) идентификации операции.
4. Способ по любому из пп. 1-3, отличающийся тем, что первые данные включают в себя идентифицирующий хирургический инструмент (500), по меньшей мере, в отношении его функции: серийный номер (SNo), дату (Lot) изготовления и/или максимальное время (SL) хранения хирургического инструмента (500) или дату окончания срока хирургического инструмента (500), и в качестве условия совместимости проверяется, было ли превышено максимальное время (SL) хранения (S 48) или дата окончания срока.
5. Способ по любому из пп. 1-4, отличающийся тем, что первые и/или вторые данные включают в себя контрольную сумму для их верификации.
6. Способ по любому из пп. 1-5, отличающийся тем, что первые данные и/или вторые данные снабжаются (S 54) защитой записи, причем защита записи вторых данных предпочтительно активируется после сохранения системной метки (S-OID) идентификации операции, причем защита записи не может больше деактивироваться после активации.
7. Способ по любому из пп. 1-6, отличающийся тем, что первые данные включают в себя информацию с предварительным критерием совместимости.
8. Хирургическая роботизированная система (10) по меньшей мере с одним манипулятором (12) для перемещения и/или приведения в действие хирургического инструмента (500),
с блоком (36) управления для управления манипулятором (12),
с устройством (160) считывания и записи для считывания и записи данных памяти (494) данных хирургического инструмента (500),
причем устройство (160) считывания и записи выполнено таким образом, чтобы с учетом соединения хирургического инструмента (500) с роботизированной системой (10) считывать из памяти (494) данных первые данные с первой информацией о хирургическом инструменте (500) и передавать их на блок (36) управления,
отличающаяся тем, что
память (494) данных хирургического инструмента (500) содержит вторые данные с информацией по меньшей мере об одном критерии совместимости хирургической роботизированной системы (10) по отношению к хирургическому инструменту (500),
устройство (160) считывания и записи выполнено таким образом, чтобы с учетом соединения хирургического инструмента (500) с роботизированной системой (10) считывать из памяти (494) данных по меньшей мере первые данные и передавать их на блок (36) управления,
блок (36) управления выполнен таким образом, чтобы при помощи содержащейся в первых данных первой информации проверять, подходит ли (S 48) хирургический инструмент (500) для применения в хирургической роботизированной системе (10),
устройство (160) считывания и записи считывает вторые данные из памяти данных и передает их на блок (36) управления, если блок (36) управления установил при проверке пригодность хирургического инструмента (500) для применения в хирургической роботизированной системе (10),
блок (36) управления выполнен таким образом, чтобы исходя из содержащейся во вторых данных второй информации проверять, соответствует ли по меньшей мере один критерий совместимости по меньшей мере одному предварительно сохраненному в блоке (36) управления условию совместимости, и
блок (36) управления допускает хирургический инструмент (500) к использованию хирургической роботизированной системой (10) только в том случае, если критерий совместимости соответствует по меньшей мере одному предварительно сохраненному условию совместимости,
причем вторые данные включают в себя заполнитель (OIDP) информации для дополнения системной метки (S-OID) идентификации операции, в качестве условия совместимости блок (36) управления проверяет наличие заполнителя (OIDP) информации во вторых данных, блок (36) управления задает системную метку (S-OID) идентификации операции для однозначной идентификации единственной операции, при которой должен использоваться хирургический инструмент (500), и устройство (160) считывания и записи сохраняет заданную системную метку (S-OID) идентификации операции в области заполнителя (OIDP) информации вторых данных как инструментальную метку (I-OID) идентификации операции.
9. Хирургическая роботизированная система по п. 8, отличающаяся тем, что упомянутый хирургический инструмент (500) предназначен для использования при одной единственной операции.
10. Хирургическая роботизированная система по п. 8 или 9, отличающаяся тем, что заполнитель (OIDP) информации представляет собой и/или содержит предварительный критерий совместимости, и в качестве условия совместимости проверяется наличие предварительного критерия совместимости.
11. Хирургическая роботизированная система по любому из пп. 8-10, отличающаяся тем, что в качестве условия совместимости блок (36) управления проверяет соответствие заданной хирургической роботизированной системой (10) системной метки (S-OID) идентификации операции с содержащейся во вторых данных в качестве критерия совместимости инструментальной меткой (I-OID) идентификации операции.
12. Хирургическая роботизированная система по любому из пп. 8-11, отличающаяся тем, что проверочное устройство для проверки хирургического инструмента (500) сохраняет перед операцией первые и/или вторые данные в памяти (494) данных хирургического инструментального блока (500).
13. Хирургическая роботизированная система по любому из пп. 8-12, отличающаяся тем, что устройство (160) считывания и записи выполнено таким образом, чтобы считывать первые данные из памяти (494) данных при соединении хирургического инструмента (500) с роботизированной системой (10).
14. Хирургическая роботизированная система по любому из пп. 8-13, отличающаяся тем, что первые данные включают в себя дату (Lot) изготовления и максимальное время (SL) хранения, и/или что первые данные включают в себя дату окончания срока, причем блок (36) управления выполнен таким образом, чтобы проверять, истекло ли максимальное время (SL) хранения или дата окончания срока.
| EP 1146830 B1, 21.04.2010 | |||
| РОБОТИЧЕСКАЯ СИСТЕМА ДЛЯ МИНИ-ИНВАЗИВНОЙ ХИРУРГИИ | 2012 |
|
RU2491161C1 |
| US 2008020714 A1, 24.01.2008 | |||
| US 2003135203 A1, 17.07.2003 | |||
| US 2008281301 A1, 13.11.2008. | |||

