Изобретение относится к электротехнике и может быть использовано для защиты асинхронных электродвигателей от аварийных режимов.
Известен способ, направленный на обеспечение безударного пуска электропривода колебательного движения по моменту при различных частотах колебаний, в котором с изменением напряжения, снимаемого с прецизионного регулируемого блока питания постоянного напряжения, обеспечивается одновременное регулирование частоты колебаний и выходного напряжения функционального преобразователя, что обеспечивает включение асинхронного двигателя в момент времени, когда выполняется алгоритм, благодаря которому осуществляется безударный по моменту пуск электропривода колебательного движения при заданной частоте колебаний (патент на полезную модель РФ № 107650, опубл. 20.08.2011 г.).
Также известен способ, который применяется в системе контроля асинхронного электродвигателя. Со статического преобразователя тока на фазные провода асинхронного электродвигателя поступает переменное напряжение, и ротор начинает вращаться. Блок управления периодически на короткое время отключает статический преобразователь тока от электродвигателя. В этом случае ротор электродвигателя продолжает вращаться по инерции и индуцирует ЭДС, которая поступает на блок управления, обрабатывается и в случае полного разгона двигателя на шину контроля выдает сигнал исправности. Если по каким-либо причинам частота вращения двигателя снижается до определенной величины, то блок управления выдает на шину контроля сигнал отказа. Работа блока управления синхронизируется генератором, подключенным к нему (патент на изобретение РФ № 2306651, опубл. 20.09.2007).
Кроме того, в этой области техники известны патенты на полезные модели: RU133365, RU7254.
В результате патентно-информационных исследований также выявлены следующие технические решения, которые были учтены заявителем при анализе: EP 00337088, EP 1826883, US 20120235610, US 4194145.
Наиболее близким техническим решением, по общей совокупности существенных признаков, заявителем принят способ защиты асинхронного электродвигателя от аварийных режимов, заключающийся в измерении тока и напряжения на питающем конце линии, к которой подключен электродвигатель, измерении крутящего момента на валу электродвигателя, угловой скорости вращения ротора электродвигателя, определении активной мощности на входе и выходе электродвигателя, потерь активной мощности в нем, формировании сигнала защиты, если указанные потери превышают заданную величину в нормальном режиме работы, отличающийся тем, что дополнительно выделяют из измеренного напряжения на питающем конце линии параметры качества электроэнергии, определяют максимальный момент электродвигателя, если измеренный крутящий момент на валу электродвигателя близок к максимальному моменту электродвигателя, формируют сигнал защиты, действующий на отключение электродвигателя, при этом потери активной мощности и максимальный момент электродвигателя определяют с учетом выделенных параметров качества электроэнергии в текущий момент времени (патент на изобретение РФ № 2302691, опубл. 10.07.2007 г.).
Недостатком данного технического решения является то, что при известном способе производится контроль механического момента на валу электродвигателя и сравнивается с возможным максимальным моментом.
Технической задачей заявляемого изобретения является обеспечение беспрерывной работы двигателей за счет безударного подхвата частоты вращения асинхронного двигателя при аварийной ситуации, например, при кратковременном отключении питания электродвигателя.
Технический результат – обеспечение беспрерывной работы двигателей переменного тока, управляемых частотными преобразователями, при кратковременном пропадании электропитания.
Техническая результат достигается тем, что способ безударного подхвата частоты вращающегося асинхронного двигателя включает измерение угловой скорости вращения ротора и формирование сигнала управления двигателем для текущего момента времени в блоке управления, отличающийся тем, что угловую скорость вращения ротора и его фазу определяют по сигналам на клеммах двигателя в течение промежутка времени между появлением напряжения электропитания и окончанием времени измерения, измеренные сигналы о скорости вращения ротора и его фазе в блоке управления преобразуют в сигнал пусковой частоты, который через преобразователь частоты формирует ток в обмотках двигателя с той же частотой, с которой вращался ротор двигателя в момент окончания измерения угловой скорости вращения ротора.
Сравнение заявляемого изобретения с прототипом показывает, что оно отличается следующими признаками:
- угловую скорость и фазу вращения ротора определяют по сигналам на клеммах двигателя в течение промежутка времени между появлением напряжения электропитания и окончанием временем измерения;
- измеренный сигнал о скорости вращения ротора и его фазе в блоке управления преобразуют в сигнал пусковой частоты;
- через преобразователь частоты формирует ток в обмотках двигателя с той же частотой, с которой вращался ротор двигателя в момент окончания измерения скорости вращения ротора.
Поэтому можно предположить, что заявляемое техническое решение соответствует критерию «новизна».
Изобретение может быть реализовано с использованием известных технических средств, поэтому оно соответствует критерию «промышленная применимость».
Существующие энергетические системы предъявляют жесткие требования к беспрерывности работы оборудования, в частности к безостановочной работе электродвигателей. Однако могут возникнуть ситуации, приводящие к полной остановке всего объекта. Например, если во время работы котельной произойдет кратковременное пропадание напряжение электросети, останавливаются электродвигатели дымососов или вентиляторов, управляемые преобразователями частоты (ПЧ). Это связано с тем, что если при появлении электропитания подать на клеммы электродвигателя напряжение с частотой, отличной от скорости вращения двигателя на выбеге, то ПЧ выдаст ошибку о превышении тока (если его частота будет меньше частоты двигателя) или ошибку о превышении напряжения в звене постоянного тока (если частота ПЧ будет больше скорости вращения двигателя). И в том и в другом случае двигатель отключится, котел будет остановлен, подача теплоносителя прекратится, что недопустимо, особенно в холодное время года. Зачастую, повторный розжиг котлов требует большого времени и присутствия квалифицированных специалистов.
До момента пропадания электропитания двигатель вращался со скоростью
N = (f*60/P)*(1-S),
где N - частота вращения вала двигателя, об/мин;
P – количество пар полюсов;
S - скольжение.
После пропадания напряжения двигатель продолжает вращаться на выбеге, постепенно теряя свою скорость. В соответствии с законом электромагнитной индукции вращающийся ротор электродвигателя из-за остаточного намагничивания наводит на обмотки статора переменное напряжение, частота которого совпадает с частотой вращения вала двигателя:
f = N*P/60*(1-S).
Этот эффект положен в основу заявляемого технического решения. Особенностью заявляемого способа является то, что измерение скорости и фазы вращения ротора осуществляется в интервале времени между появлением напряжения электропитания и окончанием заданного времени измерения, но до момента подачи фазного напряжения на обмотки статора, т.е. при выбеге. Сразу же после окончания измерения ПЧ формирует в обмотках двигателя ток точно такой же частоты, на которой вращался ротор двигателя, что и позволяет обеспечить безударный подхват частоты. Также следует отметить, что способ применяется при любой продолжительности отсутствия напряжения на двигателе и, соответственно, при любом снижении частоты вращения.
При проведении патентно-информационных исследований заявляемой совокупности признаков выявлено не было, поэтому заявляемое техническое решение соответствует критерию «изобретательский уровень».
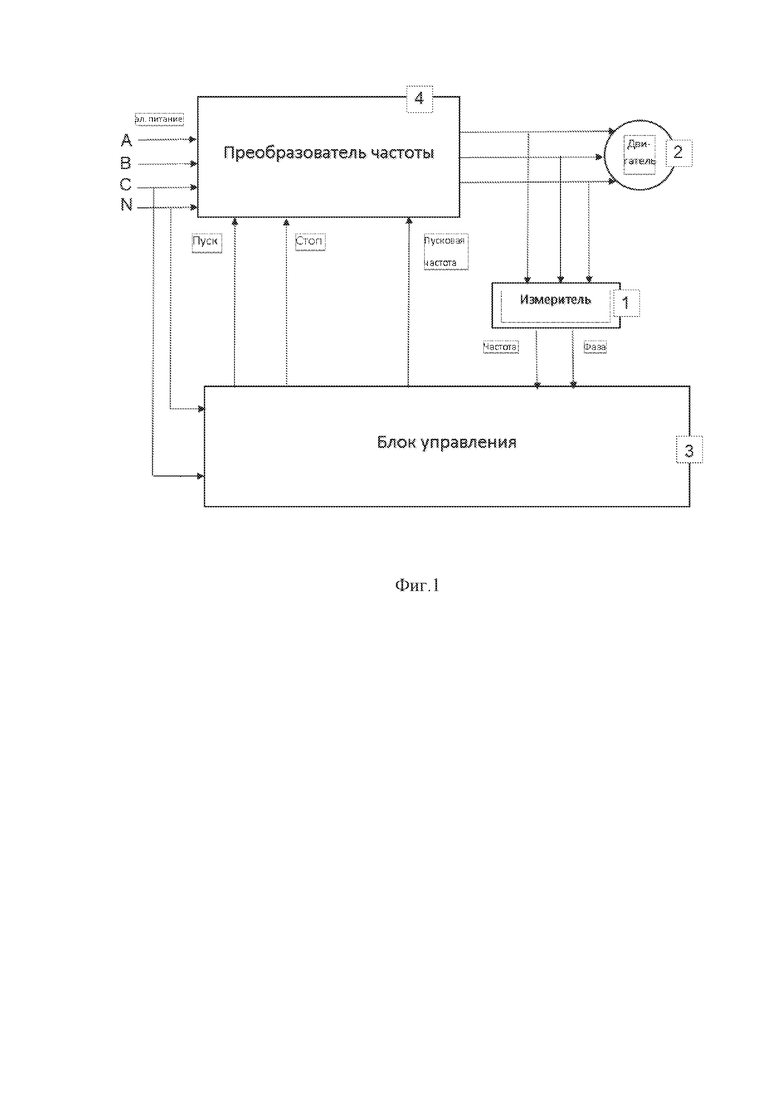
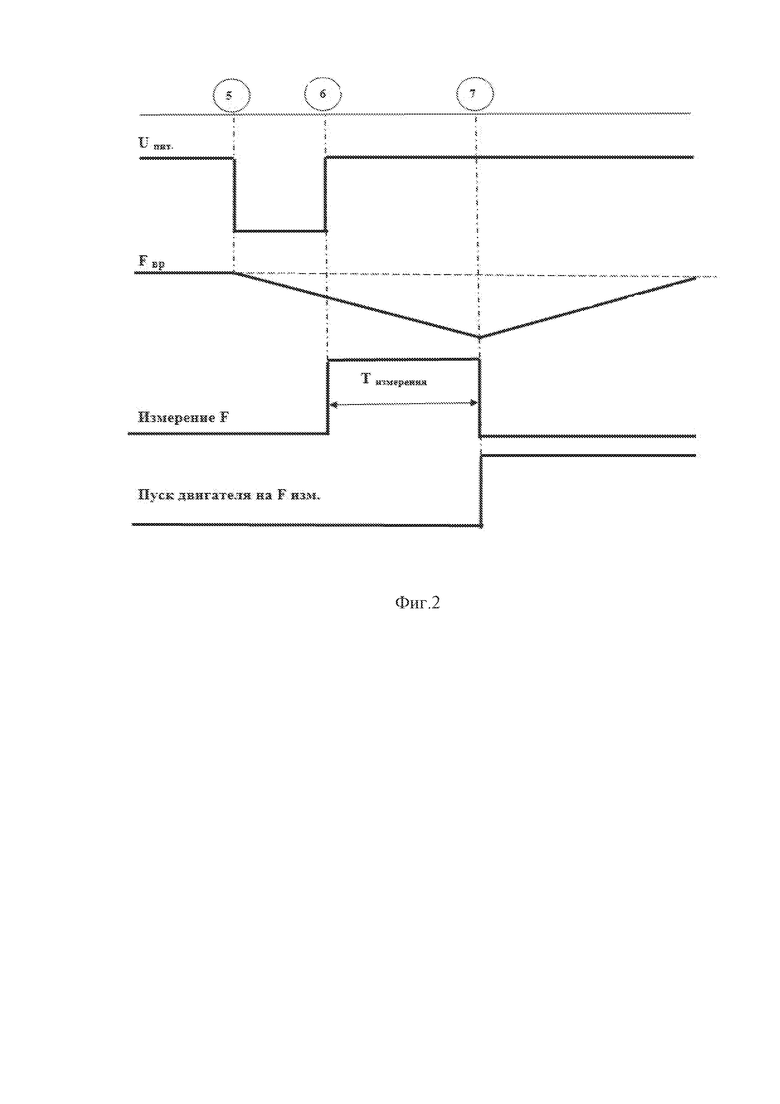
На Фиг. 1 приведена схема устройства, при помощи которого реализуется заявляемый способ, на Фиг. 2 показан график, поясняющий заявляемый способ.
1 – Измеритель частоты и фазы сигналов двигателя. Вход измерителя 1 подключен к фазным проводам двигателя, а выход соединен с входом блока управления. В качестве измерителя используется, например, микропроцессорное устройство АГАВА R3-3-DRV_V1, осуществляющее преобразование Фурье, которое вычисляет значение частоты и фазы переменного напряжения. Фаза определяет направление, а частота – скорость вращения ротора двигателя. Погрешность определения частоты не превышает +/- 0,1 Гц;
2 – Электродвигатель переменного тока, например, АИР225М2;
3 – Блок управления, выходы с блока управления соединены с входами преобразователя частоты (предпочтительно применяется ER01T-075T4M производства КБ «АГАВА»);
4 – Преобразователь частоты, выходы которого соединены с теми же клеммами, к которым подключен измеритель частоты и фазы 1 (предпочтительно применяется АИР225М2).
Способ реализуется следующим образом:
1) В момент времени точка 5 (фиг. 2) пропадает напряжение электропитания Uпит.
2) После появления Uпит (точка 6 на фиг. 2), до подачи фазного напряжения на обмотки двигателя (на выбеге) (точка 7 на фиг. 2) измеритель частоты и фазы 1 (фиг. 1) определяет скорость и направление вращения ротора электродвигателя 2 (фиг. 1). Процесс измерения (Тизмерения) занимает малый период, например, 2 сек (точка 7 на фиг. 2) относительно времени выбега 300 сек.
3) Блок управления 3 (фиг. 1), получив информацию о скорости и фазе вращения ротора, преобразовывает ее в требуемый вид и подает на вход преобразователя частоты 4 (фиг. 1) в качестве пусковой частоты.
4) Одновременно с этим (на выбеге) (точка 7 на фиг. 2) блок управления 3 (фиг. 1) выдает команду «Пуск», и преобразователь частоты 4 (фиг. 1) начинает формировать ток в обмотках двигателя точно с той же частотой, с которой вращался ротор двигателя в момент окончания измерения (точка 7 на фиг. 2). Таким образом, достигается безударный подхват частоты вращения ротора в двигателе.
5) Если направление вращения вала совпадает с заданным, то преобразователь частоты 4 разгоняет электродвигатель 2 до нужной частоты вращения и далее управляет им по заданному закону.
6) Если вал электродвигателя 2 вращается в противоположную сторону (направление определяется блоком управления 3 по сдвигу фаз сигналов в измерителе 1), блок управления 3 заставляет преобразователь частоты 4 принудительно остановить электродвигатель 2 и после этого запускает его в нужном направлении.
Таким образом, заявляемый способ позволяет обеспечить безостановочную работу электродвигателей при:
- кратковременном пропадании электропитания;
- начальном пуске вращающегося (из-за естественной тяги), например, вентилятора или дымососа;
- управления двигателем в схемах каскадного регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДХВАТА ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ | 2011 |
|
RU2462808C1 |
| Способ подхвата преобразователя частоты | 2017 |
|
RU2656846C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
| БЕЗДАТЧИКОВАЯ СИСТЕМА БЕЗОПАСНОСТИ ДЛЯ ОПРЕДЕЛЕНИЯ ВРАЩЕНИЯ БАРАБАНА ДЛЯ БЕЛЬЯ БЫТОВОГО ЭЛЕКТРОПРИБОРА С ПРИВОДОМ ОТ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2519908C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| УСТРОЙСТВО АВАРИЙНОГО ОХЛАЖДЕНИЯ РЕАКТОРНОЙ УСТАНОВКИ ПРИ ЕЕ ОБЕСТОЧИВАНИИ | 2013 |
|
RU2539862C1 |
| Асинхронное мотор-колесо с повышенным магнитным сцеплением | 2018 |
|
RU2706669C1 |
| УСТРОЙСТВО ПЛАВНОГО ПУСКА АСИНХРОННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2369002C2 |
| СИСТЕМА КОНТРОЛЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2004 |
|
RU2285237C2 |
| Способ контроля неравномерности воздушного зазора асинхронного двигателя | 1984 |
|
SU1203444A1 |
Изобретение относится к области электротехники, в частности к способам защиты асинхронных электродвигателей от аварийных режимов. Технический результат заключается в обеспечении беспрерывной работы двигателей переменного тока, управляемых частотными преобразователями, при кратковременном пропадании электропитания. Достигается тем, что способ безударного подхвата частоты вращающегося асинхронного двигателя включает измерение угловой скорости вращения ротора посредством измерителя и формирование сигнала управления двигателем для текущего момента времени в блоке управления. Угловую скорость вращения ротора и его фазу определяют по сигналам на клеммах двигателя в течение промежутка времени между появлением напряжения электропитания и окончанием времени измерения. Измеренные сигналы о скорости вращения ротора и его фазе в блоке управления преобразуют в сигнал пусковой частоты, который через преобразователь частоты формирует ток в обмотках двигателя с той же частотой, с которой вращался ротор двигателя в момент окончания измерения угловой скорости вращения ротора. 2 ил.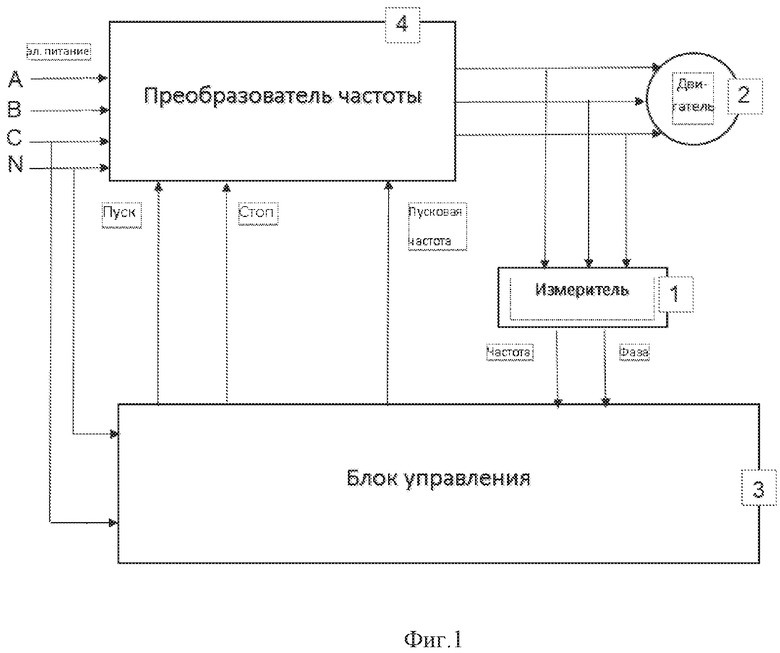
Способ безударного подхвата частоты вращающегося асинхронного двигателя, включающий измерение угловой скорости вращения ротора и формирование сигнала управления двигателем для текущего момента времени в блоке управления, отличающийся тем, что угловую скорость вращения ротора и его фазу определяют по сигналам на клеммах двигателя в течение промежутка времени между появлением напряжения электропитания и окончанием времени измерения, измеренные сигналы о скорости вращения ротора и его фазе в блоке управления преобразуют в сигнал пусковой частоты, последний через преобразователь частоты формирует ток в обмотках двигателя с той же частотой, с которой вращался ротор двигателя в момент окончания измерения угловой скорости его вращения.
| US 8593093 B2, 26.11.2013 | |||
| ВСЕСОКЗОМАЯ ПАТЕИ 1--'' -Xi;:.'':СгГАЯ 6иблио1ека (..ЬА ,__•btopoСОШНИК | 0 |
|
SU337088A1 |
| СПОСОБ ПЛАВНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2003 |
|
RU2256285C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |

