Известны тиристорные устройства плавного пуска асинхронного двигателя, в которых пуск двигателя осуществляется путем формирования определенной временной диаграммы напряжения на статоре двигателя. Известны также устройства плавного пуска, содержащие в своей структуре контур тока и реализующие пуск двигателя путем поддержания тока статора на заданном уровне. Основным назначением этих устройств является обеспечение безударного запуска и останова двигателя.
Наиболее близким к предлагаемому устройству является устройство плавного пуска, содержащее тиристорный преобразователь напряжения, включенный между статорной обмоткой двигателя и питающей сетью, датчики тока и напряжения, блок измерения электромагнитного момента, входы которого подключены к выходам датчиков тока и напряжения, и регулятор электромагнитного момента, вход обратной связи которого соединен с выходом блока измерения электромагнитного момента, а выход соединен с управляющим входом тиристорного преобразователя напряжения (патент US №5859514, кл. H02P 1/26, H02P 1/28, H02P 27/02, прототип).
Недостатком этого устройства является отсутствие возможностей регулирования скорости двигателя и обеспечения заданного темпа разгона привода при изменяющихся параметрах нагрузки.
Задачей изобретения является повышение качества регулирования скорости двигателя в асинхронных электроприводах с тиристорным управлением без датчика частоты вращения на валу.
Решение указанной задачи достигается тем, что устройство плавного пуска, содержащее тиристорный преобразователь напряжения, включенный между статорной обмоткой двигателя и питающей сетью, датчики тока и напряжения, блок измерения электромагнитного момента, входы которого подключены к выходам датчиков тока и напряжения, и регулятор электромагнитного момента, вход обратной связи которого соединен с выходом блока измерения электромагнитного момента, а выход соединен с управляющим входом тиристорного преобразователя напряжения, дополнительно снабжено блоком задания частоты вращения, функциональным блоком, датчиком ЭДС статора и регулятором частоты вращения, один вход которого соединен с выходом блока задания частоты вращения, а другой вход - с выходом функционального блока, причем выход регулятора частоты вращения соединен с управляющим входом регулятора электромагнитного момента.
Блок измерения электромагнитного момента выполнен с возможностью реализации зависимости
 ,
,
где m - электромагнитный момент двигателя;
T - период напряжения сети;
km - масштабный коэффициент;
us - мгновенное значение напряжения на статоре двигателя;
is - мгновенное значение тока двигателя;
Rs - величина активного сопротивления фазы обмотки статора.
Входы датчика ЭДС статора подключены к выходам датчиков тока и напряжения, а выход - к первому входу функционального блока, второй вход которого подключен к выходу датчика напряжения, причем функциональный блок реализует получаемую расчетным или экспериментальным путем зависимость:
 ,
,
где ω - вычисленное значение частоты вращения;
US - действующее значение напряжения фазы двигателя;
ES - действующее значение ЭДС фазы двигателя;
mk - значение максимального момента электродвигателя;
σ - полный коэффициент рассеяния двигателя;
XS - полное индуктивное сопротивление фазы двигателя;
ar - коэффициент затухания роторных цепей при разомкнутом статоре;
Sk - критическое скольжение двигателя.
На чертеже приведена структурная схема устройства плавного пуска асинхронного двигателя.
Устройство плавного пуска асинхронного двигателя 1 содержит тиристорный преобразователь напряжения 2, снабженный выводами для подключения к сети, а выходом присоединенный к статорным обмоткам асинхронного двигателя.
Управляющий вход тиристорного преобразователя подключен к выходу блока 3 управления, вход которого соединен с выходом блока 4 регулятора электромагнитного момента. Вход обратной связи блока 4 регулятора электромагнитного момента соединен с выходом блока 9 измерителя электромагнитного момента, входы которого подключены к выходам датчиков тока 7 и напряжения 8 двигателя. Вход управления блока 4 регулятора электромагнитного момента подключен к выходу блока 5 регулятора частоты вращения. Вход управления блока 5 регулятора частоты вращения связан с выходом задатчика 6 частоты вращения, а вход обратной связи - с выходом функционального блока 11. Входы функционального блока 11 подключены к выходам датчиков напряжения 8 и ЭДС 10 статора двигателя. В блоке 9 измерителя электромагнитного момента реализована зависимость:
,
где m - электромагнитный момент двигателя;
Т - период напряжения сети;
km - масштабный коэффициент;
us - мгновенное значение напряжения на статоре двигателя;
is - мгновенное значение тока двигателя;
Rs - величина активного сопротивления фазы обмотки статора.
Входы датчика ЭДС статора 10 подключены к выходам датчиков тока и напряжения, а функциональный блок выполнен с возможностью реализации получаемой расчетным или экспериментальным путем зависимости:
 ,
,
где ω - вычисленное значение частоты вращения;
US - действующее значение напряжения фазы двигателя;
ES - действующее значение ЭДС фазы двигателя;
mk - значение максимального момента электродвигателя;
σ - полный коэффициент рассеяния двигателя;
XS - полное индуктивное сопротивление фазы двигателя;
ar - коэффициент затухания роторных цепей при разомкнутом статоре;
Sk - критическое скольжение двигателя.
Устройство работает следующим образом.
В исходном состоянии, когда сигнал задания частоты вращения остается неизменным, частота вращения двигателя соответствует заданной, а момент, развиваемый двигателем, равен моменту нагрузки, на выходах датчиков тока 7, напряжения 8 и ЭДС 10 статора появляются сигналы, пропорциональные току, напряжению и ЭДС статора двигателя, на выходе блока 9 измерителя электромагнитного момента появляется сигнал, пропорциональный значению электромагнитного момента двигателя, а на выходе функционального блока 11 - сигнал, пропорциональный частоте вращения ротора асинхронного двигателя.
Регулятор 5 частоты вращения, в котором определяется отклонение частоты вращения от заданного в блоке 6 значения, вырабатывает сигнал управления, зависящий от типа регулятора скорости и величины момента сопротивления на валу двигателя.
Регулятор 4 электромагнитного момента вырабатывает сигнал управления, зависящий от отклонения электромагнитного момента двигателя от заданного блоком 5 значения.
Блок управления 3 при этом обеспечивает на выходе тиристорного преобразователя 2 напряжение, достаточное для преодоления двигателем 1 нагрузки при заданной частоте вращения.
Изменение задания на частоту вращения приведет к изменению сигнала управления, в зависимости от которого блок управления 3 будет изменять углы открытия тиристоров, уменьшая или увеличивая напряжение на выходе преобразователя 2, в результате будет возрастать или уменьшаться ток, момент и частота вращения двигателя. Сигналы на выходах датчиков тока 7, напряжения 8 и ЭДС 10 статора и блока 9 измерения электромагнитного момента будут соответствовать значениям тока, напряжения, ЭДС статора и электромагнитного момента двигателя при новой частоте вращения, а сигнал на выходе функционального блока 11 - значению этой частоты вращения, что вызовет соответствующее изменение сигнала на выходе блока 5 регулятора частоты вращения, приводящее, в свою очередь, к изменению сигнала на выходе блока 4 регулятора электромагнитного момента. Процесс регулирования будет продолжаться до тех пор, пока на выходе блока 4 регулятора электромагнитного момента не установится сигнал, обеспечивающий на выходе тиристорного преобразователя напряжение, достаточное для преодоления двигателем нагрузки при заданной частоте вращения.
При изменении момента нагрузки и колебаниях напряжения сети поддержание заданной частоты вращения осуществляется аналогичным образом.
Технический результат, достигаемый от введения в известное устройство плавного пуска асинхронного двигателя датчика ЭДС статора, функционального блока и регулятора частоты вращения, заключается в улучшении качества регулирования скорости асинхронного электродвигателя без датчика частоты вращения на валу по сравнению с известным устройством.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2007 |
|
RU2389127C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2003 |
|
RU2251204C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2380821C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2576330C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2231208C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| СПОСОБ КВАЗИЧАСТОТНОГО МЯГКОГО ПУСКА СИНХРОННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2277289C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2326480C1 |
Изобретение относится к области электротехники и может быть использовано для плавного пуска и регулирования скорости асинхронных тиристорных электроприводов общепромышленного применения, а именно для привода вентиляторов, компрессоров, насосов, шлифовальных машин, транспортеров, механизмов горизонтального перемещения подъемно-транспортных машин и др. Техническим результатом является повышение качества регулирования скорости асинхронного двигателя без датчиков момента и частоты вращения. Устройство плавного пуска содержит тиристорный преобразователь напряжения, блок управления, блок регулятора частоты вращения, блок задания частоты вращения, измеритель частоты вращения двигателя, выполненный на основе измерителя ЭДС статора с датчиками тока и напряжения двигателя, блок измерения электромагнитного момента и блок регулятора электромагнитного момента. 1 ил.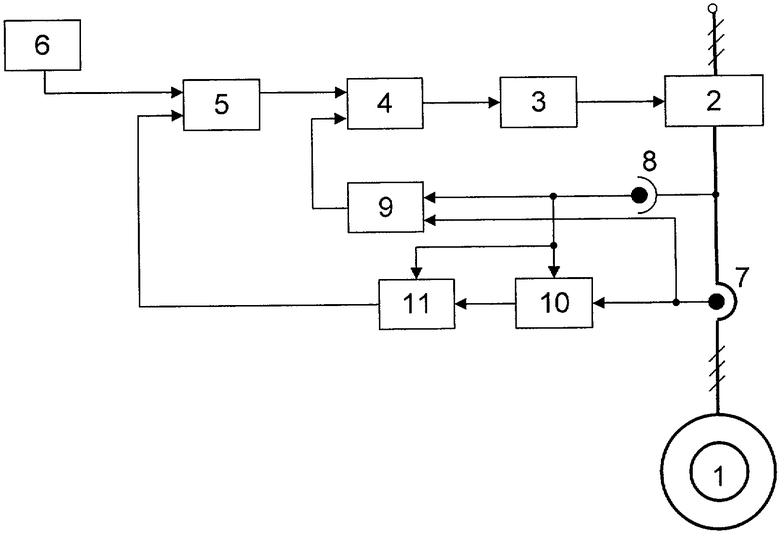
Устройство плавного пуска асинхронного двигателя, содержащее тиристорный преобразователь напряжения, включенный между статорной обмоткой двигателя и питающей сетью, датчики тока и напряжения, блок измерения электромагнитного момента, входы которого подключены к выходам датчиков тока и напряжения, и регулятор электромагнитного момента, вход обратной связи которого соединен с выходом блока измерения электромагнитного момента, а выход соединен с управляющим входом тиристорного преобразователя напряжения, отличающееся тем, что устройство дополнительно снабжено блоком задания частоты вращения, функциональным блоком, датчиком ЭДС статора и регулятором частоты вращения, один вход которого соединен с выходом блока задания частоты вращения, а другой вход - с выходом функционального блока, причем выход регулятора частоты вращения соединен с управляющим входом регулятора электромагнитного момента, при этом блок измерения электромагнитного момента выполнен с возможностью реализации зависимости
где m - электромагнитный момент двигателя;
Т - период напряжения сети;
km - масштабный коэффициент;
us - мгновенное значение напряжения на статоре двигателя;
is - мгновенное значение тока двигателя;
Rs - величина активного сопротивления фазы обмотки статора, входы датчика ЭДС статора подключены к выходам датчиков тока и напряжения, первый вход функционального блока подключен к выходу датчика ЭДС, а второй вход - к выходу датчика напряжения, причем функциональный блок выполнен с возможностью реализации зависимости
 ,
,
где ω - вычисленное значение частоты вращения;
Us - действующее значение напряжения фазы двигателя;
Es - действующее значение ЭДС фазы двигателя;
mk - значение максимального момента электродвигателя;
σ - полный коэффициент рассеяния двигателя;
XS - полное индуктивное сопротивление фазы двигателя;
αr - коэффициент затухания роторных цепей при разомкнутом статоре;
Sk - критическое скольжение двигателя.
| СПОСОБ МЯГКОГО УПРАВЛЕНИЯ АСИНХРОННОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНОЙ | 2001 |
|
RU2192703C1 |
| ТРЕХФАЗНЫЙ НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ ДЛЯ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2002 |
|
RU2231203C2 |
| Устройство управления электроприводом переменного тока | 1976 |
|
SU657558A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866681A1 |
| СОСТАВ ДЛЯ МАТИРОВАНИЯ СТЕКЛОИЗДЕЛИЙ | 2000 |
|
RU2189952C2 |
| US 5859514 A, 12.01.1999 | |||
| Способ устранения обширных дефектов твердого нёба | 2019 |
|
RU2733863C1 |
| JP 3173374 A, 26.07.1991 | |||
| Способ иммобилизации кислых протеиназ | 1976 |
|
SU621680A1 |
| Способ получения циклических ацеталей | 1951 |
|
SU101559A1 |

