Изобретение относится к области системы безопасности, предназначенной для определения вращения барабана для белья бытового электроприбора, в частности стиральной машины, содержащей корпус, в котором установлен с возможностью свободного вращения барабан для белья; дверцу, соединенную с рамой корпуса и служащую для открытия и закрытия отверстия для доступа к барабану для белья; трехфазный асинхронный электродвигатель, служащий для приведения во вращение барабана для белья; и инвертор, содержащий в свою очередь силовую электрическую схему, состоящую из шести транзисторов, расположенных попарно в трех ветвях схемы, подключенных к трем фазам статора асинхронного электродвигателя, а также устройство управления, которое осуществляет непрерывное управление шестью транзисторами для подачи к двигателю трех токов статорных обмоток для образования магнитного поля, приводящего во вращение ротор электродвигателя.
Как известно, системы безопасности стиральной машины вышеуказанного типа выполнены с возможностью измерения скорости вращения ротора трехфазного асинхронного электродвигателя с целью определения, вращается или нет барабан для белья. Информация, получаемая системой безопасности относительно того, вращается ротор или нет, обычно посылается на центральный блок управления, который отслеживает состояние стиральной машины и позволяет или запрещает производить безопасное открытие дверцы в случае пропадания электропитания.
Более конкретно, в случае пропадания электропитания, если центральный блок управления, отслеживающий состояние стиральной машины, обнаруживает наличие вращения барабана для белья, то он предотвращает случайное прикосновение пользователя стиральной машины к вращающемуся барабану. Фактически, барабан стиральной машины имеет относительно большой момент инерции, обеспечивающий вращение барабана в течение значительного времени после пропадания электропитания.
С этой целью некоторые из имеющихся в настоящее время на рынке систем безопасности включают в себя датчики, установленные на электродвигателе и предназначенные для измерения скорости вращения ротора, а также вычислительный модуль, который определяет факт вращения ротора, когда скорость, измеренная датчиками, отлична от нуля.
Хотя системы безопасности указанного выше типа являются эффективными и надежными, их недостаток заключается в необходимости использования датчиков скорости, которые, помимо усложнения аппаратной части системы, оказывают весьма значительное отрицательное влияние на общую стоимость системы безопасности.
Соответственно, были предложены технические решения без использования датчиков, в которых инверторное устройство управления применяется для оценки скорости вращения ротора на основании величин токов и напряжений обмоток статора, используемых в математической модели электрического поведения трехфазного асинхронного электродвигателя.
Говоря более конкретно, асинхронный электродвигатель может быть представлен системой уравнений, в которых напряжение, подаваемое инвертором, и замеренные фазные токи электродвигателя являются входными переменными, скорость вращения ротора является выходной функцией, а параметрами уравнения являются величины сопротивления обмоток статора и ротора, а также величины индуктивности обмоток статора и ротора. Зная эти параметры, можно вычислить скорость вращения и реализовать данную функцию в устройстве управления.
Хотя система безопасности, определяющая наличие или отсутствие вращения барабана для белья, работает на основании оцениваемой скорости вращения, указанное выше устройство управления не является настолько надежным, чтобы определить факт наличия вращения или отсутствия вращения в случае отказа системы электропитания.
То есть в случае отказа системы электропитания в устройстве управления временно пропадают заданные значения токов или напряжения статора, используемые для приведения во вращение электродвигателя, и оно оказывается не способным сделать правильную оценку скорости вращения ротора. В этом случае происходит автоматический сброс установок устройства управления для сброса параметров управления электродвигателем путем формирования состояния сброса цепей статора и ротора.
Другими словами, хотя вышеуказанное устройство управления является эффективным и надежным в определении наличия или отсутствия вращения ротора в «нормальных» условиях эксплуатации, оно не позволяет обеспечить эти функции в случае отказа системы электропитания, что отрицательно сказывается на безопасности стиральной машины.
Соответственно, задачей изобретения является создание стиральной машины, имеющей бездатчиковую систему безопасности, которая являлась бы недорогой в производстве и надежной в определении наличия вращения барабана для белья в случае отказа системы электропитания.
Указанная задача решена в бытовом электроприборе согласно пункту 1 формулы изобретения и предпочтительно в любом из пунктов формулы изобретения, зависящих непосредственно или опосредованно зависящих от пункта 1 формулы изобретения.
Изобретение также относится к способу определения наличия вращения барабана для белья бытовой стиральной машины согласно пункту 7 формулы изобретения и предпочтительно согласно любому из пунктов формулы изобретения, непосредственно или опосредованно зависящих от пункта 7 формулы изобретения.
Вариант осуществления данного изобретения, не ограничивающий его сущности указанными здесь рамками, будет описан на основе примера со ссылкой на прилагаемые чертежи.
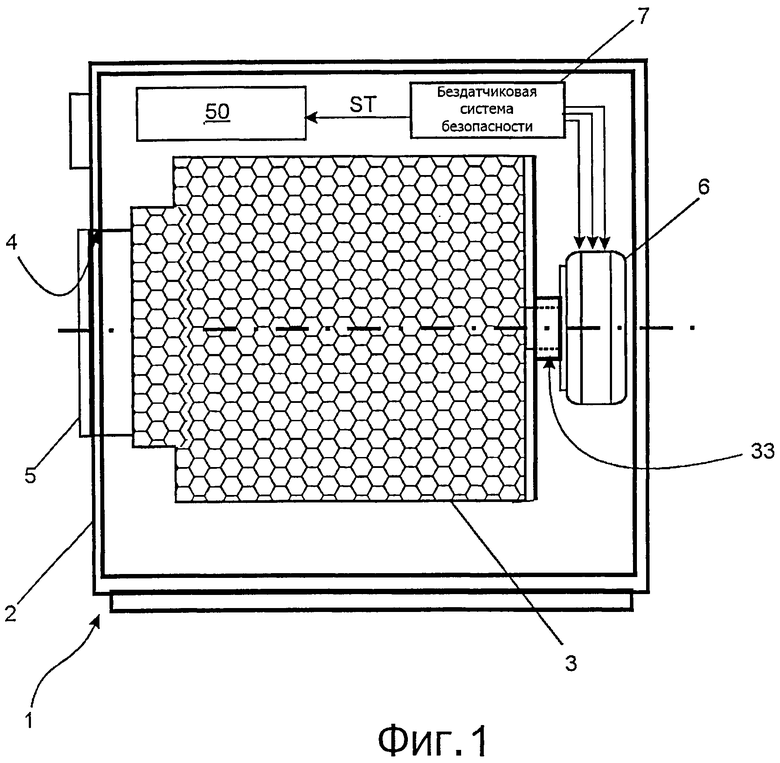
На фиг.1 показан вид сбоку, с деталями, убранными для ясности, стиральной машины, оборудованной бездатчиковой системой безопасности в соответствии с изобретением.
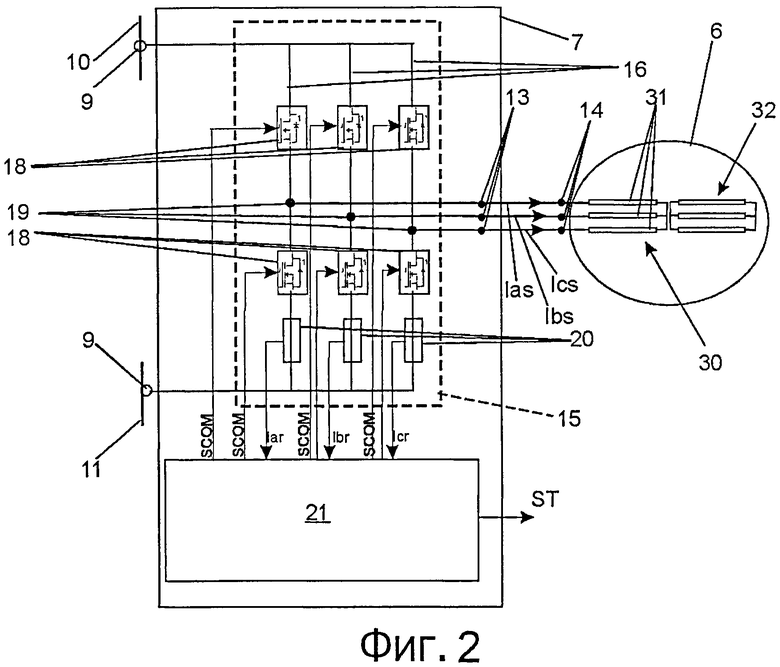
На фиг.2 показана блок-схема бездатчиковой системы безопасности, соответствующей фиг.1, в состоянии намагничивания ротора.
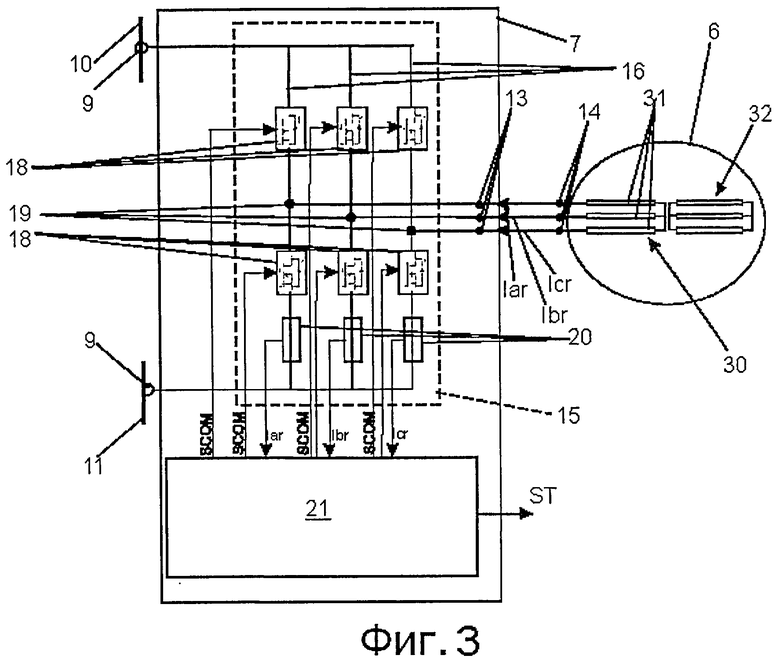
На фиг.3 показана блок-схема бездатчиковой системы безопасности, соответствующей фиг.1, в состоянии, когда осуществляется определение величин токов, индуцируемых в статоре в ответ на подачу токов в его обмотки.
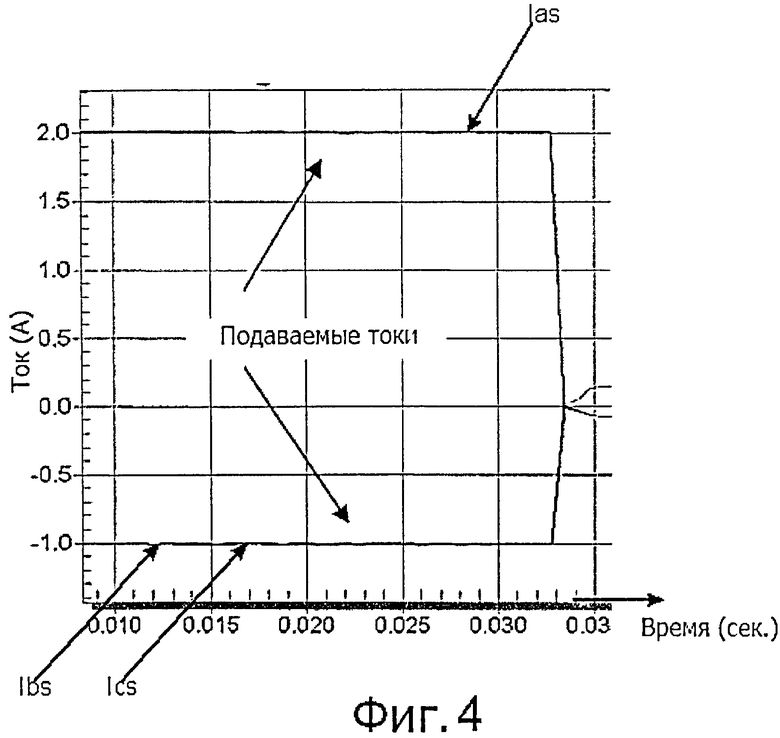
На фиг.4 показана временная диаграмма токов, подаваемых в статорные обмотки бездатчиковой системой безопасности, соответствующей фиг.2 и фиг.3.
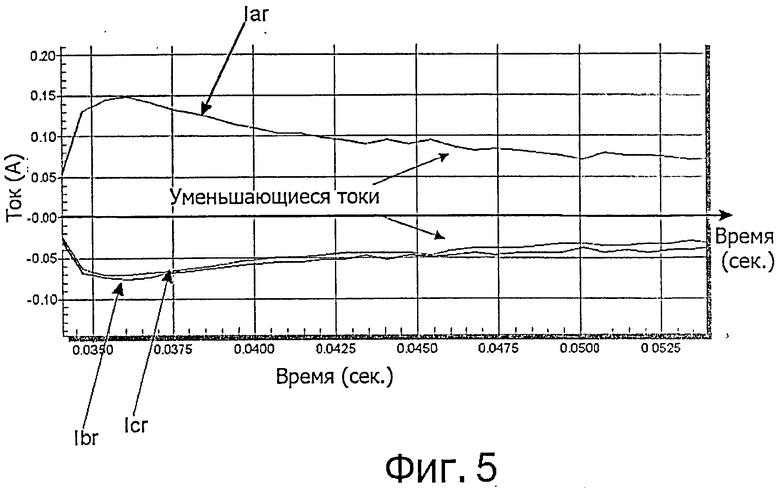
На фиг.5 показана временная диаграмма токов, индуцируемых в статорных обмотках неподвижным ротором.
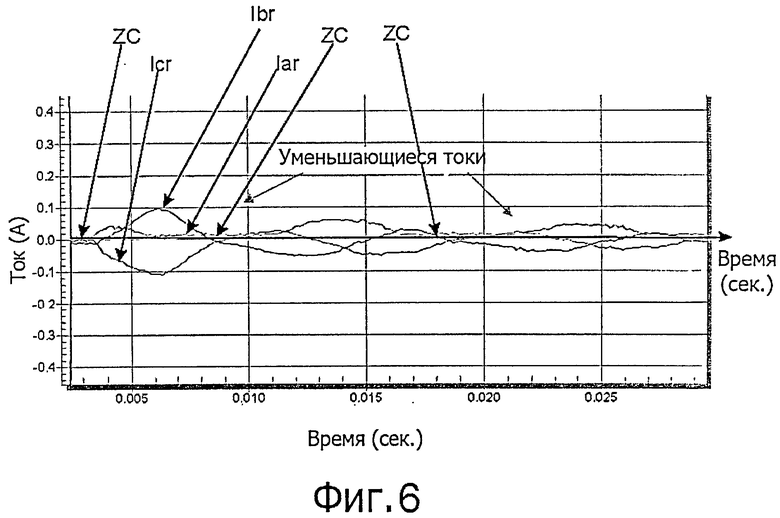
На фиг.6 показана временная диаграмма токов, индуцируемых в статорных обмотках вращающимся ротором.
На фиг.7 показана блок-схема операций, выполняемых бездатчиковой системой безопасности для определения наличия вращения барабана для белья стиральной машины.
Позицией 1 на фиг.1 обозначен бытовой электроприбор в целом, который по существу содержит внешний корпус 2, барабан 3 для белья, установленный внутри корпуса 2 и непосредственно обращенный к отверстию 4 для загрузки и выгрузки белья, образованному в корпусе 2, и дверцу 5, соединенную с корпусом 2 и имеющую возможность перемещения, например поворота, между открытым положением и закрытым положением, соответственно открывая и закрывая отверстие 4.
Электроприбор 1 также содержит трехфазный асинхронный электродвигатель 6, который, поскольку широко известен, не описан здесь подробно, за исключением того, что он содержит статор 30, имеющий три фазные обмотки 31, и ротор 32, установленный с возможностью свободного вращения внутри статора 30 и соединенный с барабаном для белья с помощью широко известного элемента 33 передачи вращения, предназначенного для вращения барабана 3 для белья.
Электроприбор 1 содержит также бездатчиковую систему 7 безопасности для определения наличия вращения ротора трехфазного асинхронного электродвигателя 6, служащую для определения того, вращается или не вращается барабан 3 для белья после прекращения отказа системы электропитания.
Следует отметить, что барабан для белья обычно имеет относительно большой момент инерции, который вызывает вращение барабана в течение длительного времени после отказа системы электропитания.
В отличие от бездатчиковых систем безопасности, установленных на известных стиральных машинах, бездатчиковая система 7 безопасности согласно данному изобретению выполнена так, что она подает в течение заранее заданного временного интервала ДТ намагничивания три величины постоянного тока Ias, Ibs, Ics к трем фазным обмоткам 31 статора трехфазного асинхронного электродвигателя 6 для намагничивания ротора 32 трехфазного асинхронного двигателя 6.
Бездатчиковая система 7 безопасности также выполнена с возможностью отключения подачи постоянных токов Ias, Ibs, Ics на обмотки статора 30 в конце заранее заданного интервала ΔТ времени намагничивания, и она определяет временной характер по меньшей мере одного из токов Iar, Ibr, Icr, индуцируемых ротором 32 в обмотках статора 30 в результате намагничивания за счет подачи постоянных токов Ias, Ibs, Ics.
Бездатчиковая система 7 безопасности также выполнена с возможностью определения наличия или отсутствия вращения ротора 32 трехфазного асинхронного электродвигателя 6 в функции определенных ею временных параметров по меньшей мере одного из трех индуцированных токов Iar, Ibr, Icr.
Более конкретно, бездатчиковая система 7 безопасности определяет наличие вращения ротора 32 трехфазного асинхронного электродвигателя 6, когда по меньшей мере один из токов Iar, Ibr, Icr, индуцируемых в обмотках статора 30 намагниченным ротором 32, имеет по существу переменный характер, с уменьшающейся со временем амплитудой.
Более конкретно, на фиг.4 дан пример временной диаграммы подаваемых токов Ias, Ibs, Ics, а на фиг.6 показан пример временной диаграммы токов Iar, Ibr, Icr, индуцируемых в обмотках статора намагниченным ротором, когда ротор вращается. Следует отметить, что временной характер токов Iar, Ibr, Icr, индуцируемых в обмотках статора вращающимся намагниченным ротором, является по существу синусоидальным и его амплитуда непрерывно уменьшается по экспоненте во времени с точками ZC пересечения нулевой оси.
В варианте осуществления данного изобретения, показанном на чертежах, бездатчиковая система 7 безопасности имеет конструктивное преимущество, заключающееся в возможности определения переменного характера временной зависимости токов, соответствующей вращению ротора 32, после окончания отказа системы электропитания, когда после подачи постоянных токов Ias, Ibs, Ics она определяет присутствие точек ZC пересечения нулевой оси кривыми индуцированных токов Iar, Ibr, Icr.
Бездатчиковая система 7 безопасности также выполнена с возможностью определения отсутствия вращения ротора 32 трехфазного асинхронного электродвигателя 6 после прекращения отказа системы электропитания, когда величина по меньшей мере одного из токов Iar, Ibr, Icr, индуцируемых ротором 32 в обмотках статора 31 трехфазного асинхронного электродвигателя 6, уменьшается по существу экспоненциально во времени.
Более конкретно, на фиг.5 показан пример временной диаграммы подаваемых токов Ias, Ibs, Ics и токов Iar, Ibr, Icr, индуцируемых в обмотках статора неподвижным намагниченным ротором. Следует отметить, что кривая временной зависимости токов Iar, Ibr, Icr, индуцируемых в обмотках статора неподвижным намагниченным ротором, уменьшается по экспоненте, с точками ZC пересечения нулевой оси.
В варианте осуществления данного изобретения, показанном на чертежах, бездатчиковая система безопасности 7 имеет преимущество, заключающееся в том, что она определяет временную характеристику, уменьшающуюся по экспоненте, соответствующую отсутствию вращения ротора, когда вслед за подачей постоянных токов Ias, Ibs, Ics она определяет отсутствие точек ZC пересечений нулевой оси индуцируемыми токами Iar, Ibr, Icr.
На фиг.2 и 3 показан предпочтительный вариант выполнения бездатчиковой системы 7 безопасности, который по существу включает в себя силовую электрическую схему 15, имеющую две клеммы 9 для подачи к первой и второй подающим линиям 10, 11 напряжения постоянного тока и три управляющие клеммы 13, соединенные соответственно с тремя фазными обмотками 31 статора через три клеммы 14 трехфазного асинхронного электродвигателя 6.
Более конкретно, силовая электрическая схема 15 имеет три управляющие ветви 16, соединенные с двумя подающими линиями 10 и 11, и каждая из них содержит два электронных переключателя 18, например транзистора, и промежуточный узел (точку разветвления) 19, распложенный между двумя переключателями 18 и соединенный с соответствующей фазной обмоткой 31 статора через соответствующую клемму 14 трехфазного асинхронного электродвигателя 6.
Более конкретно, промежуточный узел 19 соединяет переключатель 18, расположенный в верхней части ответвления схемы 16, с переключателем 18, расположенным в нижней части ответвления схемы 16.
Бездатчиковая система 7 безопасности также содержит три модуля 20 для измерения величин токов, которые расположены вдоль трех ответвлений схемы 16, предпочтительно в нижней части ответвлений схемы 16, и предназначены для измерения мгновенных значений токов, протекающих по фазным обмоткам 31 статора.
На примере, показанном на фиг.3, модули 20 содержат шунтирующие обмотки, которые измеряют величины токов Iar, Ibr, Icr, индуцируемых в обмотках статора 30 намагниченным вращающимся ротором 32.
Бездатчиковая система 7 безопасности также содержит блок управления 21, преназначенный для: подачи на транзисторы 18 управляющих сигналов SCOM, переключающих транзисторы между проводящим и запирающим состояниями, получения величин токов Iar, Ibr, Icr, замеренных шунтирующими обмотками, и выработки сигнала состояния ST, указывающего на вращение или отсутствие вращения ротора 32 трехфазного асинхронного электродвигателя 6.
Более конкретно, блок управления 21 предпочтительно содержит микропроцессор, например цифровой сигнальный процессор (DSP), предназначенный для осуществления процедуры определения факта вращения или отсутствия вращения ротора трехфазного асинхронного электродвигателя 6 по окончании отказа системы электропитания, и который выполняет операции, описанные более подробно ниже.
Обращаясь к блок-схеме, показанной на фиг.7, в случае отказа системы электропитания блок 21 управления замыкает переключатели 18 силовой электрической схемы 15 для подачи в фазные обмотки 31 статора трех токов Ias, Ibs, Ics (блок 100).
На примере, приведенном на фиг.4, по окончании отказа системы электропитания, т.е. когда на электрическую бытовую стиральную машину подается напряжение питания, силовая электрическая схема 15 подает к фазным обмоткам статора следующие токи: ток Ias, равный примерно 2 А, и токи Ibs и Ics, равные примерно 1 А.
Три подаваемых тока Ias, Ibs, Ics намагничивают ротор 32 электродвигателя 6, что приводит к временному накоплению энергии.
После заранее заданного интервала ΔТ времени намагничивания блок 21 управления отключает токи Ias, Ibs, Ics от фазных обмоток 31 статора, что приводит к размагничиванию ротора 32 электродвигателя 6 (блок 110). На этой стадии ротор 32 трехфазного асинхронного электродвигателя 6 отдает энергию, накопленную во время намагничивания подаваемыми токами Ias, Ibs, Ics, и энергия ротора вызывает появление токов Iar, Ibr, Icr в фазных обмотках 31 статора 30, временная характеристика которых будет зависеть от того, вращается ли ротор 32 или не вращается.
Как указывалось выше, если ротор 32 вращается, то каждый из токов Iar, Ibr, Icr имеет по существу переменный во времени характер, постепенно уменьшаясь по амплитуде, тогда как в противном случае, т.е. если ротор 32 неподвижен, величина каждого из этих токов уменьшается экпоненциально во времени и точки пересечения нулевой оси отсутствуют.
В этот момент блок 21 управления включает переключатели 18 для измерения индуцируемых токов Iar, Ibr, Icr с помощью шунтирующих обмоток (блок 120) и производит обработку индуцированных токов для определения их временного характера и соответственно определения того, вращается или нет ротор 32 (блок 130).
Более конкретно, как указывалось выше, в предпочтительном варианте осуществления данного изобретения блок 21 управления определяет временной характер каждого из токов Iar, Ibr, Icr на основании наличия точек ZC пересечения нулевой оси кривыми этих токов.
Более конкретно, имея последовательность точек ZC пересечения нулевой оси кривыми токов, блок 21 управления определяет наличие по существу переменного характера тока (блок 140), образуемого вращением ротора 32, тогда как в случае отсутствия пересечений нулевой оси блок управления определяет постепенное уменьшение тока во времени, вызванное отсутствием вращения ротора 32 (блок 150).
Следует отметить, однако, что в другом варианте осуществления данного изобретения блок 21 управления определяет временной характер каждого из индуцированных токов, используя процедуру дискретизации кривых токов.
После того как был определен временной характер индуцированных токов, блок управления генерирует сигнал ST состояния, указывающий на наличие вращения ротора (блок 170) и, следовательно, вращения барабана для белья (блок 180) в случае переменной временной зависимости токов.
Кроме того, блок 21 управления генерирует сигнал ST состояния, указывающий на отсутствие вращения ротора (блок 190) и соответственно барабана для белья (блок 200) в том случае, если индуцированные токи уменьшаются экпоненциально во времени.
Сигнал ST может быть подан на следящий блок 50 (фиг.1), который препятствует открытию дверцы 5, когда сигнал ST указывает на наличие вращения ротора 32 трехфазного асинхронного электродвигателя 6 и, следовательно, вращения барабана 3 для белья.
В связи с приведенными выше фактами следует отметить, что блок 21 управления может определять наличие вращения ротора 32, как описано выше, на основании временной зависимости по меньшей мере одного из индуцированных токов, а это означает, что бездатчиковая система безопасности может содержать только один модуль 20 для измерения тока.
В дополнение к вышесказанному следует отметить, что бездатчиковая система безопасности может также иметь преимущество, заключающееся в том, что она позволяет определять скорость вращения ротора 32 электродвигателя 6 на основании частоты одного из токов Iar, Ibr, Icr, циркулирующих в фазовых обмотках статора и индуцируемых в статорных обмотках ротором.
Описанная выше бездатчиковая система безопасности имеет следующие преимущества. Во-первых, она очень дешевая, поскольку не требует дополнительных электронных компонентов. А именно, описанная бездатчиковая система безопасности содержит электронные компоненты инвертора, который обычно используется для управления трехфазным асинхронным электродвигателем, но в котором данное изобретение с большим удобством позволяет реализовать описанную выше процедуру управления, причем эта процедура управления может быть удобно записана в блок управления в виде средств программного и микропрограммного обеспечения.
Во-вторых, постоянные токи, подаваемые к обмоткам статора, генерируют в роторе за счет его вращения электродвижущие силы и, следовательно, токи, которые, согласно закону Ленца, создают противодействие генерирующему их источнику, т.е. вращению ротора. Другими словами, помимо возможности определения состояния вращения или отсутствия вращения, подача постоянных токов также оказывает тормозящее воздействие на ротор и, следовательно, на барабан для белья, что исключительно важно с точки зрения безопасности эксплуатации стиральной машины в случае отказа системы электропитания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕЗДАТЧИКОВОГО ОПРЕДЕЛЕНИЯ НАЧАЛЬНОГО ПОЛОЖЕНИЯ РОТОРА СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2015 |
|
RU2594358C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ПОГРУЖНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2011 |
|
RU2463612C1 |
| МАГНИТОДИНАМИЧЕСКИЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1989 |
|
RU2027280C1 |
| Асинхронный редукторный м-фазный электродвигатель | 1970 |
|
SU448554A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| БЕСПОДШИПНИКОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2017 |
|
RU2652792C1 |
| Электропоезд высокоскоростной, энергосберегающий, экологически чистый и безопасный для людей | 2016 |
|
RU2647208C2 |
| Устройство для компенсации эдс в синхронном частотно-управляемом электроприводе | 1974 |
|
SU688976A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2019 |
|
RU2727956C1 |
| Электропоезд высокоскоростной, энергосберегающий, экологически чистый и безопасный для людей | 2016 |
|
RU2646683C1 |
Изобретение относится к бытовому электроприбору (1), содержащему корпус (2), барабан (3) для белья, установленный внутри корпуса (2) с возможностью вращения вокруг оси вращения, трехфазный асинхронный электродвигатель (6), приводящий во вращение барабан (3) для белья, и бездатчиковую систему (7) безопасности, предназначенную для определения наличия вращения ротора (32) с целью определения наличия или отсутствия вращения барабана (3) для белья. Бездатчиковая система (7) безопасности выполнена с возможностью подачи трех величин постоянных токов (Ias, Ibs, Ics) к трем силовым обмоткам (31) статора в течение заранее заданного временного интервала (ΔТ) для того, чтобы намагнитить ротор (32), отключить подачу постоянных токов (Ias, Ibs, Ics), определить временной характер по меньшей мере одного из трех индуцированных токов (Iar, Ibr, Icr), индуцируемых в обмотках статора (30) в результате намагничивания ротора (32) и определить наличие или отсутствие вращения ротора (32) на основании временного характера по меньшей мере одного из трех индуцированных токов (Iar, Ibr, Icr). 15 з.п. ф-лы, 7ил.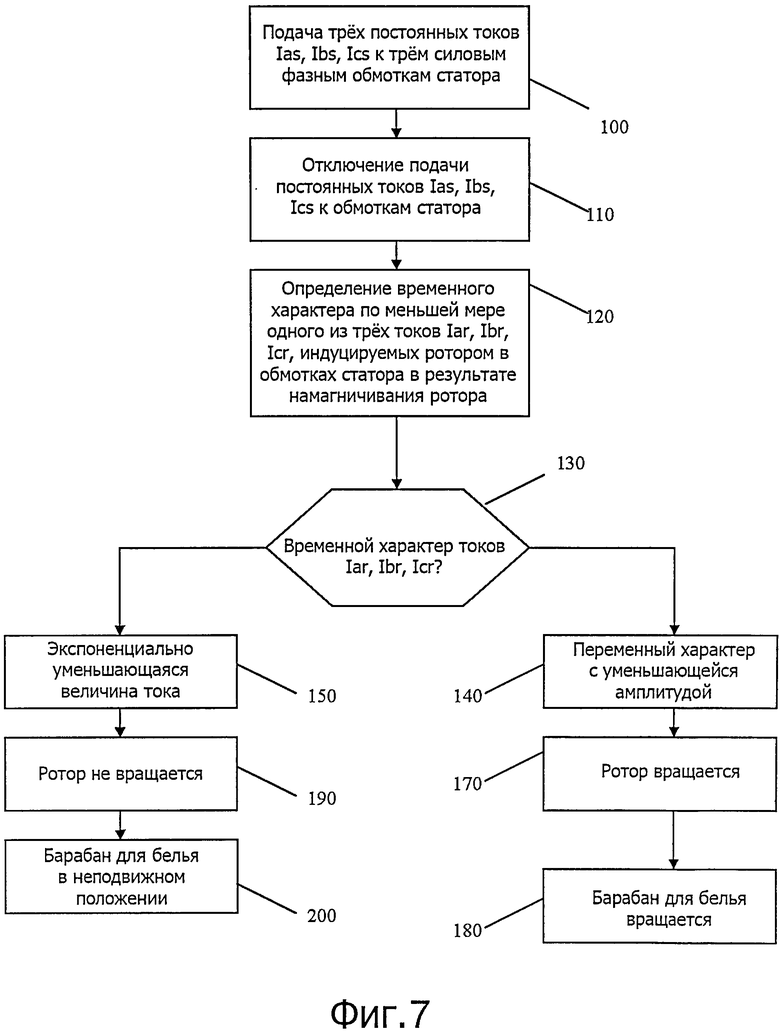
1. Бытовой электроприбор, содержащий корпус (2), барабан (3) для белья, установленный внутри корпуса (2) с возможностью вращения вокруг оси вращения, трехфазный асинхронный электродвигатель (6) для приведения во вращение барабана (3) для белья и бездатчиковую систему (7) безопасности для определения наличия вращения ротора (32) трехфазного асинхронного электродвигателя (6) с целью определения наличия или отсутствия вращения барабана (3) для белья, отличающийся тем, что система (7) безопасности выполнена с возможностью:
- подачи трех величин постоянных токов (Ias, Ibs, Ics) к трем фазным обмоткам (31) статора (30) трехфазного асинхронного электродвигателя (6) в течение заранее заданного временного интервала (ΔТ), чтобы намагнитить ротор (32) трехфазного асинхронного электродвигателя (6);
- прекращения подачи постоянных токов (Ias, Ibs, Ics) к обмоткам статора (30) в конце заранее заданного временного интервала (ΔT) и определения временного характера по меньшей мере одного из трех индуцированных токов (Iar, Ibr, Icr), индуцируемых в обмотках статора (30) в ответ на намагничивание ротора (32);
- определения наличия или отсутствия вращения ротора (32) трехфазного асинхронного электродвигателя (6) на основании временного характера по меньшей мере одного из замеренных трех индуцированных токов (Iar, Ibr, Icr).
2. Бытовой электроприбор по п.1, отличающийся тем, что бездатчиковая система (7) безопасности выполнена с возможностью определения наличия вращения ротора (32) трехфазного асинхронного электродвигателя (6), когда по меньшей мере один из индуцированных токов имеет по существу переменный характер, и его величина уменьшается со временем.
3. Бытовой электроприбор по п.1, отличающийся тем, что бездатчиковая система (7) безопасности выполнена с возможностью определения точек (ZC) пересечения нулевой оси по меньшей мере одним из индуцированных токов (Iar, Ibr, Icr) и определения временного характера индуцированного тока на основании наличия точек (ZC) пересечения нулевой оси.
4. Бытовой электроприбор по п.2, отличающийся тем, что бездатчиковая система (7) безопасности выполнена с возможностью определения точек (ZC) пересечения нулевой оси по меньшей мере одним из индуцированных токов (Iar, Ibr, Icr) и определения временного характера индуцированного тока на основании наличия точек (ZC) пересечения нулевой оси.
5. Бытовой электроприбор по любому из пп.1-4, отличающийся тем, что бездатчиковая система (7) безопасности выполнена с возможностью определения отсутствия вращения ротора (32) трехфазного асинхронного электродвигателя (6), когда величина по меньшей мере одного из индуцированных токов (Iar, Ibr, Icr) экпоненциально уменьшается со временем.
6. Бытовой электроприбор по п.5, отличающийся тем, что бездатчиковая система (7) безопасности выполнена с возможностью определения наличия пересечений (ZC) нулевой оси по меньшей мере одним из трех индуцированных токов (Iar, Ibr, Icr) и определения временного характера индуцированных токов (Iar, Ibr, Icr), уменьшающихся экпоненциально со временем, когда индуцированный ток (Iar, Ibr, Icr) не имеет точек пересечения с нулевой осью.
7. Бытовой электроприбор по любому из пп.2-4, 6, отличающийся тем, что система (7) безопасности выполнена с возможностью определения скорости вращения ротора (32) на основании числа точек (ZC) пересечения нулевой оси, измеренных в пределах заранее заданного интервала измерений.
8. Бытовой электроприбор по п.5, отличающийся тем, что система (7) безопасности выполнена с возможностью определения скорости вращения ротора (32) на основании числа точек (ZC) пересечения нулевой оси, измеренных в пределах заранее заданного интервала измерений.
9. Способ определения наличия вращения барабана (3) для белья бытового электроприбора (1), приводимого во вращение вокруг оси с помощью трехфазного асинхронного электродвигателя (6), характеризующийся тем, что включает этапы, на которых:
- подают три постоянных тока (Ias, Ibs, Ics) к фазным обмоткам (31) статора (30) трехфазного асинхронного электродвигателя (6) в течение заранее заданного временного интервала (ΔТ), чтобы намагнитить ротор (32) трехфазного асинхронного электродвигателя (6);
- отключают подачу постоянных токов (Ias, Ibs, Ics) к статору (30) по истечении заранее заданного временного интервала (ΔТ) и определяют временнй характер по меньшей мере одного из трех индуцированных токов (Iar, Ibr, Icr), индуцируемых в статоре (30) вследствие намагничивания ротора (32);
- определяют наличие или отсутствие вращения ротора (32) трехфазного асинхронного электродвигателя (6) на основании временного характера по меньшей мере одного из измеренных индуцированных токов (Iar, Ibr, Icr).
10. Способ по п.9, характеризующийся тем, что включает этап, на котором определяют наличие вращения ротора (32) трехфазного асинхронного электродвигателя (6), когда по меньшей мере один из индуцированных токов (Iar, Ibr, Icr) имеет по существу переменный временной характер, причем его амплитуда уменьшается со временем.
11. Способ по п.9, характеризующийся тем, что включает этапы, на которых определяют точки (ZC) пересечения нулевой оси по меньшей мере одним из трех индуцированных токов (Iar, Ibr, Icr) и определяют временной характер индуцированного тока на основании наличия или отсутствия точек (ZC) пересечения с нулевой осью.
12. Способ по п.10, характеризующийся тем, что включает этапы, на которых определяют точки (ZC) пересечения нулевой оси по меньшей мере одним из трех индуцированных токов (Iar, Ibr, Icr) и определяют временной характер индуцированного тока на основании наличия или отсутствия точек (ZC) пересечения с нулевой осью.
13. Способ по любому из пп.9-12, характеризующийся тем, что включает этап, на котором определяют отсутствие вращения ротора (32) трехфазного асинхронного электродвигателя (6), когда по меньшей мере один из индуцированных токов (Iar, Ibr, Icr) имеет временной характер, при котором его амплитуда уменьшается по существу экспоненциально со временем.
14. Способ по п.13, характеризующийся тем, что включает этапы, на которых определяют наличие точек (ZC) пересечения нулевой оси по меньшей мере одним из трех индуцированных токов (Iar, Ibr, Icr) и определяют временной характер индуцированного тока, при котором его амплитуда уменьшается по существу экспоненциально со временем, в том случае когда индуцированный ток (Iar, Ibr, Icr) не имеет точек (ZC) пересечения с нулевой осью.
15. Способ по любому из пп.11, 12, 14, характеризующийся тем, что включает этап, на котором определяют скорость вращения ротора (32) на основании количества точек (ZC) пересечения с нулевой осью, замеренных в пределах заранее заданного временного интервала измерений.
16. Способ по п.13, характеризующийся тем, что включает этап, на котором определяют скорость вращения ротора (32) на основании количества точек (ZC) пересечения с нулевой осью, замеренных в пределах заранее заданного временного интервала измерений.
| US 2009126220 A1, 21.05.2009 | |||
| US 2003182975 A1, 02.10.2003 | |||
| US 20040130287 A1, 08.07.2004 | |||
| WO 2007077113 A, 12.07.2007 |

