Область техники, к которой относится изобретение
Настоящее изобретение относится к области управления регулятором давления наддува в турбокомпрессоре.
Уровень техники
Некоторые двигатели внутреннего сгорания используют компрессорное оборудование, например, турбокомпрессор, для повышения удельной выходной мощности и/или крутящего момента. Например, турбокомпрессор может содержать компрессор и турбину, соединенные приводным валом, причем турбина соединена с выхлопным коллектором двигателя, а компрессор соединен со впускным коллектором двигателя. Таким образом, турбина, приводимая в действие выхлопом, снабжает компрессор энергией для повышения давления (например, при помощи наддува или давления наддува) во впускном коллекторе и увеличения расхода воздуха в двигателе. Управление наддувом может быть осуществлено путем регулирования количества газа, поступающего в турбину, например, при помощи регулятора давления наддува. В рабочем режиме к клапану регулятора давления наддува при помощи соединительных средств может быть подсоединен привод, приводимый в действие для установки клапана регулятора давления наддува в любое промежуточное положение между полностью открытым положением и полностью закрытым положением (например, на седле клапана) во впускном коллекторе и увеличения подачи воздуха в двигатель. Такой привод может представлять собой электрический привод, например, электрический двигатель.
Некоторые из приводов регуляторов давления наддува работают в соответствии с определенной стратегией регулирования, в которой используют один или более коэффициентов усиления - например, в соответствии со стратегией регулирования, в которой используют пропорциональное, интегральное и/или дифференциальное (ПИД) управление. В случае использования управления ПИД три коэффициента усиления определяют соответствующие вклады пропорциональной, интегральной и дифференциальной компонент в соотношении, которое определяет выходную величину (например, положение привода регулятора давления наддува) в зависимости от входной величины (например, величины отклонения, например, разницы между требуемым и измеренным положениями привода регулятора давления наддува).
В некоторых сценариях электрический двигатель привода регулятора давления наддува может быть подвержен воздействию высоких температур окружающей среды в связи с протеканием вблизи от него потока выхлопных газов и сам может быть нагрет до высоких температур, например, в связи с постоянной подачей в него высоких электрических токов - например, в условиях постоянной потребности в высоком или максимальном наддуве. В таких условиях ток, подаваемый в электродвигатель, может быть ограничен для поддержания температуры электродвигателя на приемлемом уровне и предотвращения повреждения электродвигателя. Однако значения коэффициента усиления, используемые в приводе регулятора давления наддува в отсутствие ограничений на силу тока, подаваемого в электродвигатель, могут быть неприемлемы для периодов работы с ограничением силы тока, подаваемого в электродвигатель.
Патентная заявка США №2010/0170244 описывает системы и способы регулирования коэффициента усиления в зависимости от текущих условий работы системы и статические, заданные развязывающие коэффициенты усиления, в число которых входит несколько значений заданных коэффициентов усиления. В таком случае реакция привода может быть определена на основе скорректированного коэффициента усиления регулятора и по меньшей мере одной компоненты расхождения. Реакция привода может представлять собой, в частности, положение регулятора пропускной способности турбокомпрессора, например, положение регулятора давления наддува турбокомпрессора. Заданное значение коэффициента усиления может быть выбрано, например, в зависимости от выходной скорости вращения и/или крутящего момента двигателя.
Авторы настоящего изобретения установили, что вышеописанное решение имеет недостаток. А именно, коэффициент усиления регулятора не может быть настроен в соответствии с ограничением силы тока, подаваемого в привод регулятора давления наддува. Таким образом, требуемое управление регулятором наддува в режимах работы с ограничением силы тока привода регулятора давления наддува и без такого ограничения не может быть обеспечено, что может привести к работе регулятора давления наддува в нежелательном режиме при ограничении силы тока привода.
Раскрытие изобретения
В соответствии с одним из решений, обеспечивающих по меньшей мере частичное устранение вышеуказанных недостатков, предложен способ, включающий в себя корректировку одного или более коэффициентов усиления контроллера регулятора давления наддува в случае ограничения силы тока, подаваемого на привод регулятора давления наддува, выполняемого при превышении температурой привода регулятора давления наддува порогового значения.
В соответствии с более конкретным примером осуществления корректировка одного или более коэффициентов усиления контроллера регулятора давления наддува включает в себя уменьшение одного или более коэффициентов усиления контроллера регулятора давления наддува по сравнению с номинальными коэффициентами усиления.
Таким образом, может быть обеспечена возможность требуемого управления приводом регулятора давления наддува как в режимах работы с ограничением силы тока, подаваемого на привод регулятора давления наддува, так и в номинальных режимах работы без ограничения силы тока, подаваемого на привод регулятора давления наддува. Таким образом, обеспечивают решение данной технической задачи.
Вышеуказанное преимущество и другие преимущества и признаки настоящего изобретения станут ясны из нижеследующего подробного описания осуществления изобретения, рассмотренного отдельно или в сочетании с прилагаемыми чертежами.
Следует понимать, что вышеприведенное раскрытие изобретения представлено для описания в упрощенной форме некоторых из концепций, более подробно описанных в нижеследующем описании осуществления изобретения. Оно не предназначено для определения ключевых или существенных характеристик настоящего изобретения, объем которого определен исключительно пунктами формулы изобретения, приведенными после подробного описания его осуществления. Кроме того, настоящее изобретение не ограничено вариантами осуществления, обеспечивающими устранение недостатков, указанных выше или в любой другой части настоящего описания.
Краткое описание чертежей
На фиг. 1 представлена схема примера двигателя.
На фиг. 2 представлен пример конструкции регулятора давления наддува.
На фиг. 3А и 3В представлены блок-схемы, иллюстрирующие способ управления турбокомпрессором при помощи регулятора давления наддува.
На фиг. 4 представлена блок-схема, иллюстрирующая способ определения температуры привода регулятора давления наддува на основе сопротивления обмоток.
На фиг. 5 представлены графики, иллюстрирующие ограничение силы тока, подаваемого на привод, и наддува в соответствии со способом по фиг. 3А-В для примера рабочего цикла двигателя.
Осуществление изобретения
В соответствии с изобретением предлагаются различные способы управления контроллером регулятора давления наддува. Например, в одном из вариантов осуществления способ включает в себя корректировку одного или более коэффициентов усиления контроллера регулятора давления наддува в зависимости от ограничения силы тока, подаваемого на привод регулятора давления наддува, причем силу тока ограничивают при превышении температурой привода регулятора давления наддува некоторого порогового значения. На фиг. 1 представлена схема, иллюстрирующая один из примеров осуществления двигателя, на фиг. 2 представлен пример конструкции регулятора давления наддува, на фиг. 3А и 3В представлены блок-схемы, иллюстрирующие способ управления турбокомпрессором при помощи регулятора давления наддува, на фиг. 4 представлена блок-схема, иллюстрирующая способ определения температуры привода регулятора давления наддува на основе сопротивления обмоток, а на фиг. 5 представлены графики, иллюстрирующие ограничение силы тока, подаваемого на привод, и наддува в соответствии со способом по фиг. 3А-В для примера рабочего цикла двигателя. Двигатель по фиг. 1 также содержит контроллер, выполненный с возможностью осуществления способа, проиллюстрированного на фиг. 3А, 3В и 4.
На фиг. 1 представлена схема, иллюстрирующая один из примеров осуществления двигателя 10, который может быть предусмотрен в составе силовой установки автомобиля. Представленный двигатель 10 содержит четыре цилиндра 30. Однако в соответствии с настоящим изобретением может быть использовано и другое число цилиндров. Управление работой двигателя 10 может быть по меньшей мере частично осуществлено системой управления, содержащей контроллер 12, а также входящими сигналами оператора 132 транспортного средства, подаваемыми через вход 130. В данном примере осуществления модуль 130 ввода содержит педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала РР положения педали. Каждая из камер 30 сгорания (например, цилиндров) двигателя 10 может содержать стенки камеры сгорания, внутри которых заключен поршень (не представлен). Поршни могут быть соединены с коленчатым валом 40 так, чтобы обеспечить преобразование возвратно-поступательного движения поршня во вращательное движение коленчатого вала. Коленчатый вал 40 может быть соединен с по меньшей мере одним ведущим колесом транспортного средства через систему промежуточной трансмиссии (не представлена). Кроме того, с коленчатым валом 40 может быть соединен через маховик двигатель стартера для обеспечения возможности запуска двигателя 10 в работу.
Камеры 30 сгорания могут получать входящий воздух из впускного коллектора 44 через впускной канал 42 и могут выпускать выхлопные газы через выхлопной канал 48. Впускной коллектор 44 и выхлопной коллектор 48 могут получать выборочное сообщение с камерой 30 сгорания через соответствующие впускные клапаны и выхлопные клапаны (не представлены). В некоторых вариантах осуществления камера 30 сгорания может содержать два или более впускных клапанов и/или два или более выхлопных клапанов.
На схеме представлен топливный инжектор 50, непосредственно соединенный с камерой 30 сгорания для впрыска в нее топлива пропорционально ширине импульса сигнала FPW, получаемого от контроллера 12. Таким образом, топливный инжектор обеспечивает так называемый прямой впрыск топлива в камеру 30 сгорания. Топливный инжектор может быть установлен, например, на боковой стороне камеры сгорания или на верхней стороне камеры сгорания. Подача топлива в топливный инжектор 50 может быть обеспечена системой подачи топлива (не представлена), содержащей топливный бак, топливный насос и распределительную топливную рампу. В некоторых вариантах осуществления камеры 30 сгорания могут вместо этого или в дополнение к этому содержать топливный инжектор, установленный во впускном коллекторе 44, в соответствии с так называемой конфигурацией впрыска во впускные каналы, в которой производят впрыск топлива во впускные каналы перед каждой из камер 30 сгорания.
Впускной канал 42 может содержать дроссельные заслонки 21 и 23, содержащие пластины 22 и 24 дроссельных заслонок, соответственно. В данном примере осуществления контроллер 12 может изменять положение пластин 22 и 24 дроссельных заслонок при помощи сигналов 12, подаваемых на приводы, предусмотренные в дроссельных заслонках 21 и 23. В соответствии с одним из примеров осуществления такие приводы могут представлять собой электрические приводы и образовывать конструкцию, обычно называемую системой электронного управления дроссельной заслонкой (Electronic Throttle Control, ETC). Таким образом, дроссельные заслонки 21 и 23 могут быть использованы для изменения подачи воздуха в камеру 30 сгорания, как и в другие цилиндры двигателя. Положение пластин 22 и 24 дроссельных заслонок может быть передано контроллеру 12 сигналом TP положения дроссельной заслонки. Впускной канал 42 может дополнительно содержать датчик 120 массового расхода воздуха, датчик 122 давления воздуха в коллекторе и датчик 123 входного давления дроссельной заслонки для подачи соответствующих сигналов MAF (массового расхода воздуха) и MAP (давления воздуха в коллекторе) в контроллер 12.
Выхлопной канал 48 может принимать выхлопные газы, поступающие из цилиндров 30. Представленный на чертеже датчик 128 выхлопных газов подсоединен к выхлопному каналу 48 перед турбиной 62 и средствами 78 снижения токсичности выхлопных газов. Датчик 128 может быть выбран из числа различных соответствующих датчиков для получения информации о соотношении содержания воздуха и топлива в выхлопных газах, например, таких как линейный датчик содержания кислорода или универсальный/широкополосный датчик содержания кислорода в выхлопных газах (Universal Or Wide-Range Exhaust Gas Oxygen, UEGO), бистабильный датчик содержания кислорода (Exhaust Gas Oxygen, EGO) или датчик содержания оксидов азота (NOx), углеводородов (НС), или угарного газа (СО). В альтернативном варианте датчик 128 может быть расположен после турбины 62. Средства 78 снижения токсичности выхлопных газов может представлять собой тройной катализатор (Three Way Catalyst, TWC), уловитель NOx, а также различные другие средства снижения токсичности выхлопных газов или их сочетания.
В некоторых вариантах осуществления температура выхлопа может быть определена косвенным образом по параметрам работы двигателя, например, скорости, нагрузке, соотношению компонентов воздушно-топливной смеси (Air-Fuel Ratio, AFR), запаздыванию зажигания и т.д. В других вариантах осуществления может быть предусмотрен температурный датчик 79 выхлопной системы, расположенный перед входом турбины 62 и после выхода выхлопного коллектора 46. Температурный датчик 79 выхлопной системы может быть в частности выполнен с возможностью измерения температуры газов, протекающих по выхлопному каналу 48 и передачи результатов измерений температуры контроллеру 12 в виде сигнала ЕТ. Датчик 79 может представлять собой, например, термопару. В более общем случае измерения температуры выхлопа могут быть обеспечены датчиками 79 и/или другими, не представленными на чертежах датчиками, расположенными в выхлопном канале 48. В других вариантах осуществления температурный датчик 79 выхлопной системы может быть выполнен иным образом - например, температурный датчик выхлопной системы может быть выполнен с возможностью измерения температуры на входе турбины 62.
Контроллер 12, представленный на фиг. 1, представляет собой микрокомпьютер, содержащий модуль 102 микропроцессора, порты 104 ввода/вывода, электронные средства хранения исполнимых программ и калибровочных значений, представленные в данном примере в виде микросхемы 106 постоянной памяти, оперативную память 108, энергонезависимую память 110 и шину передачи данных. Контроллер 12 может получать помимо сигналов, описанных выше, различные сигналы от датчиков, соединенных с двигателем 10, в том числе результаты измерений массового расхода всасываемого воздуха (MAF) от датчика 120 массового расхода воздуха; температуры охлаждающей жидкости двигателя (ЕСТ) от температурного датчика 112, схематически представленного на чертеже в одной точке двигателя 10; сигналы профиля импульсов зажигания (PIP) от датчика 118 Холла (или датчика другого типа), соединенного с коленчатым валом 40; сигнал положения дроссельной заслонки (TP) от датчика положения дроссельной заслонки, как описано выше; и сигнал абсолютного давления в коллекторе (MAP) от датчика 122, как описано выше. Сигнал скорости вращения двигателя (RPM) может быть сформирован контроллером 12 на основе сигнала PIP. Сигнал абсолютного давления в коллекторе (MAP) от датчика давления в коллекторе может быть использован для определения уровня вакуума или значения давления во впускном коллекторе 44. Следует отметить, что могут быть использованы различные сочетания указанных датчиков, например, датчик MAF без датчика MAP или наоборот. Во время работы в стехиометрическом режиме датчик MAP может определять значения крутящего момента двигателя. Кроме того, результаты измерений этого датчика в сочетании со скоростью вращения двигателя могут быть использованы для оценки заряда (включая воздух), подаваемого в цилиндр. В одном из примеров осуществления датчик 118, который также используют в качестве датчика скорости вращения двигателя, может выдавать на каждый оборот коленчатого вала 40 заранее определенное число равномерно распределенных импульсов. В некоторых примерах осуществления средства хранения данных, выполненные в виде постоянной памяти 106, могут быть запрограммированы с использованием пригодных для считывания компьютером данных, представляющих собой инструкции, исполнимые процессором 102 для осуществления нижеописанных способов, а также других, предполагаемых, но прямо не перечисленных, их вариантов.
Кроме того, двигатель 10 может содержать компрессионную аппаратуру, например, турбокомпрессор или нагнетатель, содержащую по меньшей мере компрессор 60, установленный во впускном коллекторе 44. В случае использования турбокомпрессора приведение компрессора 60 в действие может по меньшей мере частично осуществлять турбина 62 при посредстве, например, вала или других соединительных средств. Турбина 62 может быть установлена в выхлопном канале 48 с сообщением с выхлопными газами, протекающими через него. Для приведения компрессора в действие могут быть предусмотрены различные конструкции. В случае использования нагнетателя приведение компрессора 60 в действие может по меньшей мере частично осуществлять двигатель и/или электрический двигатель, причем турбина может не быть задействована. Таким образом, контроллер 12 может изменять уровень сжатия, создаваемого в одном или более цилиндрах двигателя при помощи турбокомпрессора или нагнетателя. В некоторых случаях турбина 62 может приводить в действие, например, электрический генератор 64 для подачи питания на батарею 66 через турбопривод 68. Тогда питание, поступающее от батареи 66, может быть использовано для приведения в действие компрессора 60 при помощи электромотора 70. Кроме того, во впускном коллекторе 44 может быть предусмотрен датчик 123 для подачи в контроллер 12 сигнала BOOST наддува.
Кроме того, выхлопной канал 48 может содержать регулятор 26 давления наддува для отвода выхлопных газов от турбины 62. В некоторых вариантах осуществления регулятор 26 давления наддува может представлять собой многоступенчатый регулятор давления наддува, например, двухступенчатый регулятор давления наддува, первая ступень которого выполнена с возможностью регулирования давления наддува, а вторая ступень выполнена с возможностью увеличения теплового потока, поступающего в средства 78 снижения токсичности выхлопных газов. Приведение регулятора 26 давления наддува в действие может быть обеспечено приводом 150, который может представлять собой электрический привод, например, электрический мотор, хотя использование пневматических приводов также возможно. Впускной канал 42 может содержать обводной клапан 27 компрессора, выполненный с возможностью направления впускного потока воздуха в обход компрессора 60. Контроллер 12 может осуществлять управление регулятором 26 давления наддува и/или обводным клапаном 27 компрессора при посредстве приводов (например, привода 150), например, обеспечивая их открытие при возникновении потребности в снижении давления наддува.
Впускной канал 42 может дополнительно содержат охладитель 80 воздуха наддува (Charge Air Cooler, САС), например, представляющий собой интеркулер, для снижения температуры наддувочных или нагнетаемых впускных газов. В некоторых вариантах осуществления охладитель 80 воздуха наддува может представлять собой воздушно-воздушный теплообменник. В других вариантах осуществления охладитель 80 воздуха наддува может представлять собой воздушно-жидкостный теплообменник. Кроме того, в описываемых вариантах осуществления система рециркуляции выхлопных газов (Exhaust Gas Recirculation, EGR) может направлять требуемую часть выхлопных газов из выхлопного канала 48 во впускной канал 42 через канал 140 EGR. Контроллер 12 может регулировать количество рециркулированных выхлопных газов, подаваемых во впускной канал 42, при помощи клапана 142 EGR. Кроме того, в канале может быть предусмотрен датчик EGR (не представлен), обеспечивающий измерение одного или более из следующих параметров выхлопных газов: давления, температуры и концентрации. В альтернативном варианте для управления системой EGR может быть использовано значение, вычисленное на основе сигналов, поступающих от датчика MAF (расположенного перед системой EGR), датчика MAP (во впускном коллекторе), датчика МАТ (температуры газа в коллекторе) и датчика скорости вращения коленчатого вала. Кроме того, управление системой EGR может быть основано на сигналах датчика содержания кислорода в выхлопе и/или впускного кислородного датчика (во впускном коллекторе). В некоторых условиях система EGR может быть использована для регулирования температуры воздушно-топливной смеси в камере сгорания. На фиг. 1 представлена система EGR, в которой рециркулированные выхлопные газы направляют из точки, расположенной перед турбиной турбокомпрессора, в точку, расположенную после компрессора турбокомпрессора. В других вариантах осуществления двигатель может вместо этого или в дополнение к этому содержать систему EGR низкого давления, в которой рециркулированные выхлопные газы направляют из точки, расположенной после турбины турбокомпрессора, в точку, расположенную перед компрессором турбокомпрессора.
На фиг. 1 также представлен в общем виде участок переднего края 160 транспортного средства, причем на переднем крае транспортного средства расположены жалюзи 162 воздухозаборной решетки, и двигательный отсек 164, в котором размещены по меньшей мере часть компонентов двигателя 10. Двигатель 10 может регулировать положение (например, угловое положение пластин) жалюзи 162 воздухозаборной решетки, например, для корректировки уровня всасывания воздуха в двигательный отсек 164. Положение жалюзи воздухозаборной решетки может быть использовано вместе с другими параметрами, например, такими как скорость транспортного средства, для оценки температуры окружающей среды. В частности, может быть оценена температура окружающей среды внутри двигательного отсека 164; в одном из примеров осуществления температура окружающей среды может соответствовать температуре воздуха, окружающего привод регулятора 150 давления наддува и находящегося вблизи него (например, в точке 166), а в другом примере осуществления температура окружающей среды может соответствовать температуре воздуха, находящегося в непосредственной близости от привода регулятора давления наддува (например, в точке 168).
На фиг. 2 показан пример возможной конструкции регулятора 200 давления наддува. Регулятор 200 давления наддува, например, может представлять собой регулятор 26 давления наддува по фиг. 1. Приведение регулятора 200 давления наддува в действие обеспечивает привод 202, который может представлять собой привод 150 по фиг. 1. В некоторых примерах осуществления привод 202 представляет собой электрический привод, содержащий электрический двигатель. В некоторых примерах осуществления привод 202 в частности может представлять собой вращательный привод, содержащий элемент, который приводят во вращение для изменения положения привода. Выходной вал 201 привода 202 соединен с соединительным механизмом 204, а именно, с первым звеном 206 соединительного механизма. Как показано на чертеже, в представленном варианте осуществления соединительный механизм 204 представляет собой четырехзвенный соединительный механизм, хотя могут быть предусмотрены и другие соединительные механизмы, например, линейная штанга. Соединительный механизм совершает вращение вокруг двух осей, в число которых входят первая ось 208, вокруг которой совершают вращение первое звено 206 и второе звено 210, и вторая ось 212, вокруг которой совершают вращение третье звено 214 и четвертое звено 216. Первое, второе, третье и четвертое звенья 206, 210, 214 и 216 соединены между собой и вместе образуют сплошной элемент. На противоположном приводу 202 конце соединительный механизм 204 соединен четвертым звеном 216 с клапаном 218 регулятора давления наддува, который может быть установлен в полностью открытое положение, полностью закрытое положение или любое промежуточное между ними положение относительно седла 220 клапана. Представленное на чертеже седло 220 клапана расположено на некотором участке выхлопного канала 222, который, например, может представлять собой выхлопной канал 48 двигателя 10 по фиг. 1. Такое плавное изменение положения клапана 218 регулятора давления наддува обеспечивает возможность регулирования количества выхлопных газов, поступающих в турбину (например, в турбину 62 по фиг. 1) турбокомпрессора. Таким образом обеспечивают возможность регулирования давления наддува, создаваемого в двигателе, например, двигателе 10 по фиг. 1, в соответствии с требуемым уровнем наддува и другими условиями работы. Управление положением клапана 218 регулятора 200 давления наддува может быть в частности обеспечено путем приведения в действие привода 202 и установки положения его выходного вала 201, перемещения которого могут быть переданы на выхлопной клапан посредством соединительного механизма 204.
В варианте осуществления, представленном на фиг. 2, регулятор 200 давления наддува содержит контроллер 223 регулятора давления наддува, используемый в рабочем режиме для управления приводом 202 регулятора давления наддува с целью обеспечения требуемого положения регулятора давления наддува и, следовательно, требуемого уровня наддува в двигателе. В некоторых примерах осуществления контроллер 223 регулятора давления наддува может получать информацию о требуемом уровне наддува от контроллера двигателя, например, от контроллера 12 по фиг. 1, и определять соответствующее положение привода (или регулятора давления наддува), обеспечивающее создание требуемого уровня наддува, перемещая привод 202 в соответствии с таким определенным положением привода. Контроллер 223 регулятора давления наддува может использовать для такого приведения в действие привода 202 различные соответствующие механизмы, в число которых в частности, но не исключительно входят обратная связь, упреждающее управление, пропорциональное, интегральное и/или дифференциальное (ПИД) управление. В некоторых примерах осуществления контроллер 223 регулятора давления наддува может приводить в действие привод 202 в соответствии с одним или более коэффициентами усиления -например, тремя коэффициентами усиления, каждый из которых соответствует одному из трех механизмов управления, пропорциональному, интегральному или дифференциальному. Коэффициенты усиления могут обеспечивать численное масштабирование величины сигналов управления ПИД и могут воздействовать на различные выходные сигналы, определяемые контроллером 223, например, на чувствительность (например, величины скорости и перерегулировании) установки положения привода (например, клапана регулятора давления наддува), определение силы тока привода и т.д. Однако следует понимать, что могут быть использованы и другие методы управления регулятором давления наддува. Например, в некоторых примерах осуществления контроллер 223 регулятора давления наддува может быть объединен с контроллером двигателя (например, контроллером 12 по фиг. 1)
В некоторых примерах осуществления система управления наддувом, регулирующая в рабочем режиме уровень наддува в двигателе (например, в двигателе 10 по фиг. 1), может содержать турбокомпрессор с регулятором 200 давления наддува, в котором привод 202 регулятора давления наддува соединен с клапаном 218 регулятора давления наддува, и контроллер (например, контроллер 223 регулятора давления наддува, контроллер 12), выполненный с возможностью приведения в действие привода регулятора давления наддува в соответствии с требуемым уровнем наддува с учетом одного или более коэффициентов усиления управления. В соответствии с некоторыми подходами такие один или более коэффициентов усиления управления могут быть выбраны в соответствии с температурой привода 202 регулятора давления наддува. В частности, при превышении температурой привода 202 регулятора давления наддува некоторого порогового значения могут быть выбраны один или более уменьшенных коэффициентов усиления управления. Такие один или более уменьшенных коэффициентов усиления управления могут быть уменьшены по сравнению с номинальными коэффициентами усиления управления. Один или более уменьшенных коэффициентов усиления управления могут быть выбраны для обеспечения требуемого управления регулятором давления наддува, например, в случае ограничения силы тока, подаваемого на привод 202 регулятора давления наддува. Однако при температуре привода 202 регулятора давления наддува, равной или меньшей пороговой температуры, могут быть выбраны один или более номинальных коэффициентов усиления управления. Один или более номинальных коэффициентов усиления управления могут быть больше, чем соответствующие им уменьшенные коэффициенты усиления управления.
Регулятор 200 давления наддува дополнительно содержит датчик 224 положения, который может быть выполнен с возможностью измерения изменений углового положения выходного вала 201 для оценки по ним положения клапана 218 регулятора давления наддува. В некоторых примерах осуществления может быть использован сельсин-датчик, выполненный с возможностью измерения поворота вращающегося компонента привода 202, причем сформированные им импульсы передают на контроллер 223 регулятора давления наддува. Датчик 224 положения может быть приспособлен для вариантов осуществления, в которых вместо четырехзвенного соединительного механизма, представленного в конфигурации по фиг. 2, применяют соединительный механизм типа линейной штанги. В любом случае, измерения, производимые датчиком 224 положения, могут быть использованы для определения положения клапана 218 регулятора давления наддува - в частности, расстояния между верхней поверхностью седла 220 клапана и нижней поверхностью клапана 218 регулятора давления наддува. Однако в других вариантах осуществления положение клапана регулятора давления наддува может быть определено при помощи программной модели с использованием одного или более сигналов (например, сигнала BOOST), описанных выше со ссылками на фиг. 1 и передаваемых в контроллер 12.
Следует понимать, что регулятор 200 давления наддува и его различные компоненты могут быть изменены без выхода за пределы объема настоящего изобретения. Например, в приводе 202 могут быть предусмотрены датчик тока и/или датчик усилия, используемые вместо датчика 224 положения или совместно с ним. Измерение силы тока может быть осуществлено при помощи датчика или зонда, а в других вариантах осуществления сила тока может быть вычислена в соответствии с законом Ома (или другим соотношением) как отношение напряжения на приводе (например, напряжения на контактах привода) к сопротивлению привода (например, сопротивлению обмоток), если эти две величины известны или могут быть измерены или вычислены. Кроме того, как описано выше, для соединения привода 202 с клапаном 218 регулятора давления наддува могут быть предусмотрены соединительные механизмы других типов, в частности, но не исключительно, линейная штанга. Кроме того, к клапану 218 регулятора давления наддува может быть присоединен смещающий механизм, устанавливающий клапан в исходное положение в отсутствие воздействия на клапан привода 202.
Превышение рабочими температурами порогового значения может привести к ухудшению работы привода 202, например, в связи с повреждением электрического двигателя. Таким образом, может быть желательным определение рабочей температуры привода 202 и принятие различных мер при превышении рабочей температурой порогового значения. На рабочую температуру привода 202, называемую в настоящем описании «температурой привода» могут влиять различные факторы. Термин «температура привода», используемый в настоящем описании, обозначает в частности температуру обмоток привода, которая, как более подробно описана ниже, может быть вычислена на основе определения температуры окружающей среды вблизи привода или, в других вариантах осуществления, получена прямой оценкой температуры обмоток на основе определения сопротивления таких обмоток. Поскольку температура окружающей среды вблизи привода 202 (т.е. в блоке регулятора 200 давления наддува) может оказывать значительное влияние на температуру привода, а на температуру окружающей среды может влиять протекающий вблизи поток выхлопных газов, например, выхлопных газов, протекающих по выхлопному каналу 222, блок регулятора 200 давления наддува может содержать температурный датчик 226, выполненный с возможностью измерения температуры окружающей среды вблизи привода 202, которая в некоторых примерах осуществления может быть использована для определения температуры привода. В других вариантах осуществления температура привода может быть оценена по различным параметрам работы двигателя и транспортного средства. Например, в число таких параметров работы могут входить температура окружающей среды, скорость вращения двигателя, нагрузка на двигатель, скорость транспортного средства и положение жалюзи воздухозаборной решетки (например, угловое положение пластин жалюзи воздухозаборной решетки 162 по фиг. 1). Как было описано выше, температура окружающей среды может соответствовать температуре в общей области, расположенной вблизи привода 202 (например, соответствующей точке 166 по фиг. 1), или в области, расположенной в непосредственной близости от привода (например, соответствующей точке 168 по фиг. 1).
В вариантах осуществления, в которых для определения температуры привода используют температуру окружающей среды, для данного значения температуры окружающей среды может быть определена максимальная сила тока, который может быть подан на привод. Максимальная сила тока представляет собой максимальную допустимую силу тока, который может быть подан на привод 202 при данной температуре окружающей среды без возникновения неприемлемого уровня опасности ухудшения работы привода, и может быть определена в связи с тем, что непрерывная подача высоких токов может значительно увеличить вероятность повреждения привода. Сила тока, подаваемого на привод 202, может быть ограничена (т.е. уменьшена по сравнению с максимальным допустимым током, который может быть подан на привод) в случаях увеличения температуры привода до сравнительно высоких значений при необходимости подачи максимального тока, например, в связи с необходимостью поддержания полностью закрытого положения и, следовательно, обеспечения максимального уровня наддува. В таком случае силу тока ограничивают, так как подача максимального возможного тока на привод 202 привела бы к повышению уже высокой температуры, до которой привод был нагрет в связи с высокой температурой окружающей среды, и была бы связана с неприемлемо высоким риском повреждения привода.
В соответствии с примером, не налагающим каких-либо ограничений, зависимость температуры обмоток привода 202 от времени может выражать следующее соотношение: T(t)=I2*R*KT*(1-e-t/T)+TE, где Т - температура обмоток привода (например, используемая в некоторых примерах осуществления в качестве температуры привода), t - время, I - сила тока в обмотках, R - сопротивление обмоток, KT - термическое сопротивление обмоток (например, выраженное в единицах °С/Вт), т - тепловая постоянная времени, а ТЕ - температура окружающей среды (например, определенная, как описано выше, или на основе выходного сигнала температурного датчика 226). Однако в пределе при t стремящемся к бесконечности данное соотношение принимает следующий вид: T=I2*R*KT*+TE. Таким образом, максимальный ток, который может быть подан на привод, может быть определен в соответствии с данным соотношением по следующей преобразованной формуле:  , где IMAX - максимальная сила тока, непрерывная подача которого на привод допустима в течение неопределенного времени, (называемая в настоящем описании «максимальным допустимым током»), а TMAX - максимальная допустимая температура обмоток, т.е. максимальная температура, до которой обмотки привода могут быть нагреты без возникновения повреждений. В некоторых примерах осуществления максимальная допустимая температура обмоток может быть определена заранее, по известным свойствам привода 202.
, где IMAX - максимальная сила тока, непрерывная подача которого на привод допустима в течение неопределенного времени, (называемая в настоящем описании «максимальным допустимым током»), а TMAX - максимальная допустимая температура обмоток, т.е. максимальная температура, до которой обмотки привода могут быть нагреты без возникновения повреждений. В некоторых примерах осуществления максимальная допустимая температура обмоток может быть определена заранее, по известным свойствам привода 202.
В других примерах максимальный допустимый ток обмоток может быть определен на основе определения температуры обмоток в рабочем режиме, вместо определения температуры окружающей среды или в дополнение к нему. В вариантах осуществления, в которых температуру обмоток определяют в рабочем режиме и используют вместо температуры окружающей среды, максимальный допустимый ток может быть определен по разнице между моментальным значением температуры обмоток и максимальной допустимой температурой обмоток. В некоторых примерах осуществления изменения силы тока, подаваемого на привод 202, могут быть пропорциональны такой разнице.
В некоторых вариантах осуществления моментальное значение температуры обмоток привода 202 может быть определено на основе значения сопротивления обмоток привода. В некоторых примерах осуществления такое сопротивление обмоток привода может быть определено на основе среднего из нескольких измеренных значений сопротивления обмотки ротора привода во всем диапазоне угла поворота ротора. Измерение и усреднение значений сопротивления обмотки при разных углах поворота ротора во всем диапазоне его вращения (например, в пределах полного поворота на 360°, половинного поворота на 180°, любого частичного поворота в пределах 360° и т.д.) может повысить точность оценки сопротивления обмоток и оценки температуры привода, поскольку сопротивление обмоток может зависеть от положения ротора в электрическом двигателе. Сопротивление конкретной обмотки может быть измерено различными соответствующими методами, в частности, но не исключительно, путем измерения напряжения и силы тока, подаваемых на привод 202. Измерение силы тока может быть произведено, например, при помощи описанного выше токового датчика или зонда. Усредненное сопротивление обмоток может быть соотнесено с температурой обмоток на основе известных свойств материала обмоток, например, по справочной таблице. Для получения значений сопротивления обмоток в пределах соответствующего периода работы может быть использован способ 400, представленный на фиг. 4 и описанный ниже.
Как описано выше, в определенных условиях может быть желательно ограничение силы тока, подаваемого на привод 202. В случае ограничения силы тока, подаваемого на привод 202, могут быть приняты различные меры реакции на ограничение силы подаваемого тока. Одна из таких мер может включать в себя корректировку одного или более коэффициентов усиления, используемых контроллером регулятора 223 давления наддува для управления приводом 202, так как такие один или более коэффициентов усиления, используемые контроллером в отсутствие ограничений силы тока, подаваемого на привод, (называемые в настоящем документе «номинальными коэффициентами усиления») могут быть неприменимы для управления приводом в случае ограничения силы тока, подаваемого на привод. Например, использование номинальных коэффициентов усиления управления во время ограничения силы тока, подаваемого на привод может привести к нестабильности установки положения привода и клапана регулятора давления наддува, что, в свою очередь, может затруднить обеспечение в двигателе требуемого наддува. В связи с этим в некоторых примерах осуществления могут быть использованы один или более коэффициентов усиления управления, величина которых уменьшена по сравнению с соответствующими им номинальными коэффициентами усиления управления. Хотя использование уменьшенных коэффициентов усиления управления может уменьшить переходную характеристику регулятора 200 давления наддува, переходная характеристика может тем не менее быть сохранена на приемлемом уровне, так как управление регулятором давления наддува с уменьшенными коэффициентами усиления все же может обладать более высокой чувствительностью, чем общее управление наддувом, чувствительность которого зависит и от других компонентов, отличных от регулятора давления наддува и динамики текучих сред. В одном из примеров осуществления, не налагающем каких-либо ограничений, контроллер 223 регулятора давления наддува может осуществлять управление приводом 202 отчасти в соответствии с разницей между требуемым положением привода (например, определенным по значению требуемого уровня наддува, получаемому от контроллера 12 по фиг. 1) и реальным текущим положением привода (например, измеряемым датчиком 224 положения). Такая разница, которую можно рассматривать как расхождение, может быть умножена на коэффициент усиления, значение которого может быть скорректировано (например, уменьшено) в случае ограничения силы тока, подаваемого на привод 202. В некоторых подходах коэффициент усиления может быть изменен в такой степени, в которой ограничена сила тока, подаваемого на привод 202, вместо других параметров или в сочетании с ними. Кроме того, может быть произведен сравнительно постепенный переход от использования одного или более номинальных коэффициентов усиления к использованию одного или более измененных коэффициентов усиления для предупреждения неблагоприятных и резких изменений режима работы регулятора давления наддува, которые могут быть вызваны неплавным переходом от номинальных к отличным от номинальных коэффициентов усиления. Для обеспечения такого постепенного перевода управления с использования одного или более скорректированных коэффициентов усиления на использование одного или более номинальных коэффициентов усиления могут быть использованы соответствующие механизмы и соответствующий фильтр.
Как описано выше, в некоторых примерах осуществления контроллер 223 регулятора давления наддува может использовать механизмы пропорционального, интегрального и дифференциального (ПИД) управления. В таком случае контроллер 223 может использовать три коэффициента усиления (KP, KI, KD) для систем пропорционального, интегрального и дифференциального управления, соответственно. Как было описано выше, контроллер 223 может осуществлять управление приводом 202 отчасти на основе разницы (расхождения) между требуемым значением параметра (например, требуемым положением привода) и соответствующим текущим (например, измеренным или вычисленным) значением параметра (например, текущим положением привода). Контроллер 223 может предпринять попытку минимизации такого расхождения для достижения максимально точного соответствия между требуемым и текущим значениями параметра путем определения результата следующего соотношения:  , где u(t) - выходная величина управления ПИД (например, положение привода, сила тока привода, приложение которого приводит привод в данное положение, и т.д.), t - время, e(t) - расхождение в зависимости от времени, т - переменная интегрирования (причем пределы интегрирования могут составлять, например, от 0 до t), а KP, KI и KD - пропорциональная, интегральная и дифференциальная постоянные управления, определяющие вклады пропорциональной, интегральной и дифференциальной компонент, соответственно. Таким образом, в случае ограничения силы тока, подаваемого на привод 202, один или более (в некоторых примерах осуществления - все) из коэффициентов усиления ПИД KP, KI и KD могут быть скорректированы описанным образом. В некоторых примерах осуществления коэффициенты усиления ПИД могут быть изменены одинаково - например, каждый из параметров KP, KI and KD может быть умножен на одну и ту же постоянную величину (например, определенную в зависимости от степени ограничения силы тока). В других вариантах осуществления коэффициенты усиления ПИД могут быть изменены индивидуально; каждый из параметров KP, KI and KD может быть умножен на соответствующую постоянную величину, определенную для данного коэффициента усиления ПИД.
, где u(t) - выходная величина управления ПИД (например, положение привода, сила тока привода, приложение которого приводит привод в данное положение, и т.д.), t - время, e(t) - расхождение в зависимости от времени, т - переменная интегрирования (причем пределы интегрирования могут составлять, например, от 0 до t), а KP, KI и KD - пропорциональная, интегральная и дифференциальная постоянные управления, определяющие вклады пропорциональной, интегральной и дифференциальной компонент, соответственно. Таким образом, в случае ограничения силы тока, подаваемого на привод 202, один или более (в некоторых примерах осуществления - все) из коэффициентов усиления ПИД KP, KI и KD могут быть скорректированы описанным образом. В некоторых примерах осуществления коэффициенты усиления ПИД могут быть изменены одинаково - например, каждый из параметров KP, KI and KD может быть умножен на одну и ту же постоянную величину (например, определенную в зависимости от степени ограничения силы тока). В других вариантах осуществления коэффициенты усиления ПИД могут быть изменены индивидуально; каждый из параметров KP, KI and KD может быть умножен на соответствующую постоянную величину, определенную для данного коэффициента усиления ПИД.
Для определения и/или сохранения величин поправок к коэффициентам усиления ПИД могут быть применены различные соответствующие механизмы; например, может быть использована функция, результатом которой является поправка к коэффициенту усиления (например, постоянная величина, на которую умножают неизмененный коэффициент усиления для получения измененного коэффициента усиления), а входным аргументом которой является численное выражение степени ограничения силы тока (например, разность максимального тока, который может быть подан на привод 202, и ограниченного тока, подаваемого на привод). В другом примере осуществления может быть предусмотрено обращение к справочной таблице, в которой сохранены значения поправок к коэффициентам усиления в зависимости от одного или более параметров (например, разности максимального тока, который может быть подан на привод 202, и ограниченного тока, подаваемого на привод, температуры привода и т.д.), с вводом одного или более параметров для получения значений поправок к коэффициентом усиления. Следует понимать, что вышеописанная корректировка коэффициентов усиления может быть использована в применении к коэффициентам усиления, отличным от ПИД, в том числе и не связанным с положениями регулятора давления наддува или привода.
На фиг. 3А и 3В представлены блок-схемы, иллюстрирующие способ 300 управления турбокомпрессором с использованием регулятора давления наддува. Способ 300 может быть исполнен контроллером двигателя (например, контроллером 12 по фиг. 1) и/или контроллером регулятора давления наддува (например, контроллером 223 регулятора давления наддува по фиг. 2) для управления, например, регулятором 200 давления наддува при помощи привода 202 по фиг. 2. В некоторых примерах осуществления способ может включать в себя определение требуемого значения параметра (например, положения привода, положения регулятора давления наддува, давления наддува и т.д.) и соответствующего текущего значения параметра (например, текущего положения привода, текущего положения регулятора давления наддува, текущего давления наддува и т.д.). В таких примерах осуществления корректировка регулятора давления наддува может быть произведена в соответствии с разницей между требуемым и соответствующим текущим значениями такого параметра.
На этапе 302 способ включает в себя определение требуемого уровня наддува в соответствии с требованиями водителя и параметрам работы двигателя. Оцениваемые параметры могут быть непосредственно измерены датчиками, например, датчиками 112, 118, 120, 122, 123 и 134, и/или оценены по другим параметрам работы двигателя. В число оцениваемых параметров работы двигателя могут входить температура охлаждающей жидкости двигателя, температура моторного масла, массовый расход воздуха (MAF), давление в коллекторе (MAP), уровень наддува (например, давление наддува BOOST, измеряемое датчиком 123), скорость вращения двигателя, скорость холостого хода, барометрическое давление, затребованный водителем крутящий момент (например, по данным датчика 134 положения педали), температура воздуха, скорость транспортного средства и т.д.
На этапе 304 способа определяют текущий уровень наддува. Текущий уровень наддува может быть определен непосредственным измерением при помощи датчика, например, датчика 123. Результат измерения может быть передан контроллеру 12 при помощи сигнала давления BOOST и сохранен, например, в пригодных для чтения компьютером средствах хранения данных (например, постоянной памяти 105, оперативной памяти 108 и/или энергонезависимой памяти 110 контроллера 12 по фиг. 1). В альтернативном варианте осуществления текущий уровень наддува может быть оценен по другим рабочим параметрам, например, по параметрам MAP и RPM.
На этапе 306 способа определяют атмосферное давление. Атмосферное давление может быть, например, измерено датчиком MAP в момент запуска двигателя и/или оценено по рабочим параметрам двигателя, включая параметры MAF, MAP, положение дроссельной заслонки и т.д. Результат измерения может быть передан контроллеру и сохранен в пригодных для чтения компьютером средствах хранения данных. В альтернативном варианте осуществления атмосферное давление может быть оценено по другим рабочим параметрам двигателя.
На этапе 308 способа определяют разницу между текущим и требуемым уровнями наддува. Например, такую разницу может определять контроллер двигателя. В некоторых примерах осуществления такая разница может быть определена путем вычитания требуемого уровня наддува из текущего уровня наддува.
На этапе 310 способа определяют величину подъема клапана регулятора давления наддува, необходимую для уменьшения разницу между текущим и требуемым уровнями наддува, определенную на этапе 308. В некоторых примерах осуществления разницу между текущим и требуемым уровнями наддува вместе с величиной текущего подъема клапана регулятора давления наддува (например, измеренной датчиком 224 положения) вводят в соответствующий управляющий механизм, выполненный с возможностью определения величины подъема клапана регулятора давления наддува, необходимой для уменьшения разницу между текущим и требуемым уровнями наддува. Величина подъема клапана регулятора давления наддува может быть использована, например, в качестве входного параметра динамики регулятора давления наддува. В некоторых приводах регуляторов давления наддува величина подъема клапана регулятора давления наддува может быть введена в рабочий цикл регулятора давления наддува. Включение такой величины в рабочий цикл регулятора давления наддува может включать в себя обращение к справочным таблицам для расчета рабочего цикла регулятора давления наддува. В сигнале управления регулятором давления наддува (WGC) может быть предусмотрена модуляция ширины импульса в соответствии с рабочим циклом регулятора давления наддува для корректировки положения регулятора давления наддува. Подъем клапана регулятора давления наддува может быть осуществлен с использованием, например, упреждающего управления, обратной связи и/или других алгоритмов управления. Рабочий цикл регулятора давления наддува может быть сформирован, например, контроллером двигателя или контроллером регулятора давления наддува.
Для учета запаздывания срабатывания привода регулятора давления наддува может быть предусмотрен компенсирующий член. Кроме того, компенсирующий член может дополнительно содержать поправки, соответствующие движению парных распределительных валов, которое может влиять на давление наддува. Например, при смещении впускного распределительного вала, увеличивающем давление наддува относительно атмосферного давления, значение компенсирующего члена может быть уменьшено. Аналогичным образом, при смещении впускного распределительного вала, уменьшающем давление наддува относительно атмосферного давления, значение компенсирующего члена может быть увеличено.
На этапе 312 способа определяют требуемое положение привода, необходимое для получения подъема клапана регулятора давления наддува, определенного на этапе 310. Требуемое положение привода может быть введено в качестве входного параметра в различные соответствующие механизмы управления, включая вышеописанные. В некоторых вариантах осуществления вместо этого может быть определена требуемая ориентация привода, например, вращательная ориентация вращающегося компонента привода.
Как показано на фиг. 3В, на этапе 314 способа определяют требуемую силу тока привода, необходимую для получения требуемого подъема клапана регулятора давления наддува. Требуемая сила тока привода может быть определена по разнице между моментальным положением привода и требуемым положением привода с учетом усилия, с которым выхлопные газы воздействуют на клапан регулятора давления наддува.
На этапе 316 способа определяют температуру привода. Определение температуры привода может включать в себя этап 318 определения температуры окружающей среды привода. Как было описано выше, температура окружающей среды привода может быть определена по выходному сигналу датчика, выполненного с возможностью измерения такой температуры - например, выходной сигнал температурного датчика 226 по фиг. 2 может быть использован в качестве одного из входных параметров для определения температуры окружающей среды. Однако для определения температуры окружающей среды привода могут быть использованы и другие механизмы. В некоторых примерах осуществления температура окружающей среды может быть оценена по одному или более рабочим параметрам (например, температуре наружного воздуха, скорости вращения двигателя, скорости транспортного средства, положению жалюзи воздухозаборной решетки и т.д.). Температура окружающей среды может соответствовать общей области, расположенной вблизи привода, (например, точке 166 по фиг. 1) или области, расположенной в непосредственной близости от привода, (например, точке 168 по фиг. 1).
На этапе 320 способа определяют максимальный допустимый ток, который может быть подан на привод, в соответствии с температурой привода, определенной на этапе 316, и известным характеристикам привода. В частности, для определения максимального допустимого тока может быть использовано следующее описанное выше соотношение:  причем значение Тмах может быть фиксированным для данного привода. В некоторых примерах осуществления значение Тмах может быть принято сравнительно низким, чтобы обеспечить дополнительную гарантию от повреждения привода. В некоторых вариантах осуществления, если определение температуры окружающей среды невозможно, в качестве значения ТЕ в вышеприведенном соотношении может быть использована наиболее неблагоприятная температура (т.е. максимальная температура двигательного отсека).
причем значение Тмах может быть фиксированным для данного привода. В некоторых примерах осуществления значение Тмах может быть принято сравнительно низким, чтобы обеспечить дополнительную гарантию от повреждения привода. В некоторых вариантах осуществления, если определение температуры окружающей среды невозможно, в качестве значения ТЕ в вышеприведенном соотношении может быть использована наиболее неблагоприятная температура (т.е. максимальная температура двигательного отсека).
На этапе 322 способа определяют, превосходит ли текущее значение силы тока привода, определенное на этапе 314, максимальное допустимое значение силы тока привода. Если текущее значение силы тока привода превосходит максимальное допустимое значение силы тока привода (ДА), производят переход к этапу 324. Если текущее значение силы тока привода не превосходит максимального допустимого значения силы тока привода (НЕТ), производят переход к этапу 334.
На этапе 324 способа производят ограничение наддува для предотвращения ухудшения работы привода. Ограничение наддува может включать в себя этап 325, на котором привод устанавливают в наилучшее положение, возможное при подаче тока, не превышающего максимального допустимого значения силы тока привода при непрерывной подаче тока на привод в течение периода, длительность которого превышает пороговое значение. Другими словами, подачу тока на привод ограничивают. Непрерывная подача тока на привод может иметь место, например, в условиях, в которых необходим максимальный наддув. Пороговое значение длительности может быть установлено равным различным величинам для обеспечения защиты привода (например, равным одной секунде) без предотвращения работы привода, не связанной с опасностью его повреждения. Установка привода в наилучшее возможное положение приводит, в свою очередь, к установке наилучшего возможного подъема клапана регулятора давления наддува. Например, требуемый уровень наддува (например, максимальный наддув) может быть уменьшен путем увеличения подъема клапана регулятора давления наддува по сравнению с уровнем подъема, необходимым для получения требуемого уровня наддува (например, нулевым подъемом, т.е. полностью закрытым положением). Однако величина, на которую увеличивают подъем клапана регулятора давления наддува, величина, на которую уменьшают силу тока, подаваемого на привод, для получения уменьшения, и величина, на которую уменьшают требуемый уровень наддува, соответствуют минимальным величинам, необходимым для предотвращения повреждения привода. Другими словами, требуемый уровень наддува уменьшают на минимальную величину, что может минимизировать или, в некоторых случаях, сделать незаметным отрицательное влияние на производительность транспортного средства, воспринимаемую оператором транспортного средства. В некоторых примерах осуществления величины, на которые увеличивают подъем клапана регулятора давления наддува и уменьшают силу тока, могут быть пропорциональны величине, на которую требуемый ток привода превосходит максимальный допустимый ток.
На этапе 326 способа может быть дополнительно определена температура обмоток привода. В общем случае этапы 326 и 328 способа соответствуют подходу к защите привода, в котором температуру обмоток используют для ограничения силы тока и, в частности, для определения величины, на которую уменьшают силу тока.
На фиг. 4 представлен способ 400 определения температуры привода 202 регулятора давления наддува по фиг. 2 по сопротивлению обмоток. Способ 400 может быть исполнен, например, контроллером 12 двигателя по фиг. 1.
На этапе 401 способа определяют, допускают ли условия работы проведение измерений сопротивления обмоток привода регулятора давления наддува. Подходящие условия могут соответствовать, в частности, приближению клапана регулятора давления наддува к полностью закрытому положению (например, его приближению к седлу 220 клапана по фиг. 2). Следует отметить, что в число ситуаций, не соответствующих приближению клапана регулятора давления наддува к полностью закрытому положению, могут входить ситуации удаления клапана от полностью закрытого положения (например, в направлении полностью открытого положения) или ситуации перемещения клапана в направлении полностью закрытого положения без достижения полностью закрытого положения (например, если требуемый подъем клапана регулятора давления наддува, на который должен быть установлен клапан, не соответствует полностью закрытому положению).
В некоторых примерах осуществления подходящие условия также могут требовать скорости приближения клапана к полностью закрытому положению, меньшей порогового значения. Движение клапана со скоростью, меньшей порогового значения, может обеспечить возможность определения сопротивления обмоток по способу 400 при нескольких положениях ротора, так как в некоторых примерах осуществления сопротивление привода может соответствовать следующему соотношению: R=(1/I)(V-L*(dI/dt)+K*s), где R - сопротивление обмоток, I - сила электрического тока, подаваемого на привод, V - напряжение на приводе, L - индуктивность обмоток, t - время, K - постоянная величина, а s - скорость перемещения клапана. Таким образом, при скоростях перемещения клапана ниже порогового значения последний член (K*s) вышеупомянутого соотношения может стать пренебрежимо малым. В таких условиях электрический ток может быть близок к установившемуся состоянию, в результате чего член (dI/dt) может стать пренебрежимо малым, и соотношение принимает вид R=V/I. Соответственно, сопротивление обмоток может быть определено при наличии возможности измерения или определения значений V и I. В некоторых вариантах осуществления такое упрощение оценки сопротивления обмоток может быть использовано в сценариях без приближения клапана к полностью закрытому положению. Однако в других примерах осуществления сопротивление обмоток может быть определено при скоростях перемещения клапана, превышающих пороговое значение, путем оценки величин (L*(dI/dt)) и (K*s) при известных значениях постоянной K и индуктивности L.
Кроме того, подходящие условия могут соответствовать стационарному положению клапана регулятора давления наддува, соответствующему установившемуся состоянию - например, постоянного положения клапана. Положение клапана может соответствовать полностью закрытому положению, полностью открытому положению или любому промежуточному между ними положению с частичным подъемом клапана.
В случае определения на этапе 401 способа наличия условий работы, подходящих для проведения измерений сопротивления обмоток, (ДА) способ переходит к этапу 402. В случае определения наличия условий работы, не подходящих для проведения измерений сопротивления обмоток, (НЕТ) способ переходит к этапу 330 способа 300 по фиг. 3.
На этапе 402 способа изменяют положение (например, угловую ориентацию) ротора привода регулятора давления наддува. В некоторых примерах осуществления контроллер двигателя может передавать приводу регулятора давления наддува измененное положение ротора, тем самым вызывая изменение положения ротора. Как более подробно описано ниже, положение ротора может быть изменено на различные соответствующие величины (например, углы).
На этапе 403 способа положение впускной дроссельной заслонки может быть скорректировано для компенсации изменения уровней наддува, вызванных переходом от требуемого положения регулятора давления наддува к измененному положению регулятора давления наддува. Например, может быть изменено положение впускной дроссельной заслонки 21 и/или 23 по фиг. 1. В некоторых сценариях корректировка положения впускной дроссельной заслонки может включать в себя увеличение открытия дроссельной заслонки, если измененное положение регулятора давления наддува увеличивает открытие клапана регулятора давления наддува, и наоборот.
На этапе 404 способа определяют сопротивление обмоток привода регулятора давления наддува. Как было описано выше, в некоторых примерах осуществления сопротивление обмоток может быть определено путем измерения напряжения и тока, подаваемых на привод, и деления значения напряжения на значение силы тока. В других сценариях, в которых скорость перемещения клапана регулятора давления наддува превышает пороговое значение, сопротивление обмотки может быть определено по описанному выше соотношению (R=(1/I)(V-L*(dI/dt)+K*s)).
На этапе 406 способа определенное сопротивление обмоток сохраняют и привязывают к моментальному положению привода. Сопротивление обмоток и положение привода могут быть сохранены в различных соответствующих средствах хранения данных, в том числе, но не исключительно, в справочной таблице.
На этапе 408 способа определяют, было ли определено достаточное число значений сопротивления обмоток. Может быть предусмотрено обращение к средствам хранения данных, в которых сохраняют определенные значения сопротивления обмоток, для оценки числа уже определенных значений сопротивления обмоток. В качестве минимального числа значений сопротивления обмоток, обеспечивающего адекватную характеризацию сопротивления обмоток привода, могут быть выбраны различные числа. Вместо этого или вместе с этим может быть установлен минимальный угловой интервал определения сопротивления обмоток. В некоторых примерах осуществления может быть предусмотрено обращение к средствам хранения данных для определения диапазона поворота ротора при определении сопротивления обмоток. Значения сопротивления обмоток могут быть определены в любом полном или частичном диапазоне поворота ротора (например, в диапазоне полного оборота на 360°, половинного оборота на 180° или поворота, превышающего полный оборот). Таким образом, положение ротора может быть изменено на этапе 402 несколько раз с соответствующим шагом (например, углом) изменения, как описано выше. Размер шага и число измерений могут быть выбраны, например, в соответствии с условиями работы и ожидаемой длительностью возможного периода сохранения условий, подходящих для измерения сопротивления обмоток. Соответственно, если число определенных значений сопротивления обмоток найдено недостаточным (НЕТ), способ производит возврат к этапу 402. Если число определенных значений сопротивления обмоток найдено достаточным (ДА), способ производит переход к этапу 410.
На этапе 410 способа производят оценку температуры привода по определенным значениям сопротивления обмоток. Оценка температуры может включать в себя усреднение определенных значений сопротивления обмоток соответствующим образом для получения усредненного сопротивления обмоток. Затем усредненное сопротивление обмоток может быть использовано для определения температуры обмоток с учетом известных свойств материалов обмоток. Например, может быть предусмотрено обращение к справочной таблице, содержащей несколько значений сопротивления обмоток, каждое из которых приведено в соответствие с температурой обмоток.
Как показано на фиг. 3В, на этапе 328 способа после успешного определения температуры обмоток привода на этапе 326 дополнительно может быть ограничена сила тока, подаваемого на привод, в соответствии с разницей между температурой обмоток, определенной на этапе 326, и максимальной допустимой температурой обмоток. В некоторых примерах осуществления величина, на которую ограничивают силу тока, может быть пропорциональна разнице между температурой обмоток и максимальной допустимой температурой обмоток.
На этапе 330 способа дополнительно может быть ограничена подача топлива в двигатель (например, двигатель 10 по фиг. 1), в котором используют регулятор давления наддува. Величина, на которую ограничивают подачу топлива, может быть пропорциональна величине, на которую ограничивают наддув и, в частности, подачу воздуха в двигатель. Таким образом может быть обеспечено сохранение оптимального (например, стехиометрического) режима работы двигателя.
На этапе 332 способа может быть произведено извещение об ограничении наддува на этапе 324 или 328. Извещение об ограничении наддува может включать в себя, например, предупреждение оператора транспортного средства при помощи индикатора, расположенного на приборной доске, а также может включать в себя регистрацию данного события контроллером двигателя и/или выдачу кода диагностики.
На этапе 334 способа один или более коэффициентов усиления управления, используемых для управления приводом регулятора давления наддува, могут быть скорректированы в соответствии с ограничением силы тока, подаваемого на привод. В некоторых примерах осуществления в число таких коэффициентов усиления управления могут входить три коэффициента усиления ПИД (KP, KI и KD), которые определяют вклады, соответственно, пропорциональной компоненты, интегральной компоненты и дифференциальной компоненты, суммируемых для получения выходной величины, соответствующей входной величине (например, в соответствии с описанным выше соотношением . Входная величина может представлять собой расхождение, например, разницу между требуемым давлением наддува и текущим давлением наддува, разницу между требуемым положением привода регулятора давления наддува и текущим положением привода регулятора давления наддува, разницу между требуемым подъемом клапана регулятора давления наддува и текущим подъемом клапана регулятора давления наддува и т.д. Выходная величина может представлять собой положение привода регулятора давления наддува, подъем клапана регулятора давления наддува, давление наддува и т.д. В общем случае, один или более коэффициентов усиления управления, используемых для управления приводом регулятора давления наддува, могут быть скорректированы в соответствии с ограничением силы тока, подаваемого на привод. В некоторых вариантах осуществления корректировка одного или более коэффициентов усиления управления может включать в себя уменьшение таких одного или более коэффициентов усиления управления. Степень уменьшения одного или более коэффициентов усиления управления, например, может быть пропорциональна степени ограничения силы тока, подаваемого на привод. Вместо этого или в дополнение к этому степень уменьшения одного или более коэффициентов усиления управления может быть пропорциональна степени превышения температурой привода максимальной допустимой температуры. В некоторых вариантах осуществления контроллер двигателя может определять поправки к коэффициентам усиления управления и передавать такие поправки контроллеру регулятора давления наддува. Кроме того, как описано выше, для обеспечения плавного, невозмущающего перехода от номинальных коэффициентов усиления управления к скорректированным коэффициентам усиления управления может быть использован соответствующий механизм, например, средства фильтрации.
На этапе 336 способа осуществляют управление приводом регулятора давления наддува в соответствии с одним или более скорректированными коэффициентами усиления управления. Такое управление может привести к отклонению одного или более параметров, определенных в соответствии с одним или более скорректированными коэффициентами усиления управления, от значений, определенных в соответствии с нескорректированными номинальными коэффициентами усиления управления в отсутствие ограничения силы тока, подаваемого на привод. Поскольку один или более коэффициентов усиления управления могут быть уменьшены по сравнению с соответствующими номинальными значениями, чувствительность регулятора давления наддува может быть снижена. Например, контроллер регулятора давления наддува может определять один или более параметров (например, ток привода, положение привода регулятора давления наддува, подъем клапана регулятора давления наддува, поправки к ним и т.д.) в соответствии со скорректированными коэффициентами усиления управления, полученными от контроллера двигателя.
На этапе 338 способа определяют, существует ли еще превышение требуемым значением силы тока привода, определенным на этапе 314, максимальной допустимой силы тока, определенной на этапе 320. В случае определения сохранения превышения требуемым значением силы тока максимальной допустимой силы тока (ДА) способ производит возврат к этапу 338. В таком случае использование скорректированных коэффициентов усиления управления может быть продолжено для обеспечения возможности требуемой работы регулятора давления наддува при наличии ограничения силы тока, подаваемого на привод. В случае же определения отсутствия требуемым значением силы тока максимальной допустимой силы тока (НЕТ) способ производит переход к этапу 340.
На этапе 340 происходит возобновление работы регулятора давления наддува в номинальном режиме. Поскольку ранее было определено, что требуемое значение силы тока регулятора более не превосходит максимальную допустимую силу тока, ограничение тока регулятора и уровня наддува более не требуется, так как на привод в текущих условиях работы может быть подан максимальный допустимый ток без возникновения неприемлемой опасности повреждения регулятора давления наддува. Таким образом, ограничение наддува и силы тока, подаваемого на привод, может быть прекращено, как и использование одного или более скорректированных коэффициентов усиления управления. Соответственно, на этапе 342 способа возобновляют использование одного или более номинальных коэффициентов усиления управления, применяемых в номинальном режиме работы привода регулятора давления наддува (в отсутствие ограничений силы тока, подаваемого на привод). Плавный, невозмущающий переход от использования скорректированных коэффициентов усиления управления к использованию номинальных коэффициентов усиления управления может быть обеспечен посредством использования соответствующих механизмов, например, средств фильтрации. Таким образом, требуемая работа регулятора давления наддува и привода регулятора давления наддува может быть обеспечена как номинальном режиме, так и в режиме ограничения силы тока при помощи переключения между соответствующими коэффициентами усиления управления.
Если на этапе 322 было установлено, что требуемый ток привода не превосходит максимального допустимого значения силы тока, на этапе 344 на привод подают требуемый ток для получения требуемого положения привода. Соответствующий механизм преобразования напряжения в ток может быть использован для преобразования напряжения, вырабатываемого контроллером привода, в ток.
На этапе 346 способа определяют, соответствует ли положение привода требуемому положению привода. Может быть предусмотрено сравнение измеренного положения привода с требуемым положением привода. В некоторых вариантах осуществления разница между положением привода и требуемым положением привода, меньшая некоторого порогового значения, может быть проигнорирована. Если положение привода не соответствует требуемому положению привода (НЕТ), способ производит возврат к этапу 314. Если положение привода соответствует требуемому положению привода (ДА), способ производит переход к этапу 348.
На этапе 348 способа силу тока, подаваемого на привод корректируют, чтобы обеспечить сохранение требуемого подъема клапана и управление положением привода. Сохранение требуемого подъема клапана может быть обеспечено при помощи алгоритмов обратной связи и/или упреждающего управления. Например, для управления подъемом клапана может быть использован внутренний управляющий контур. Таким образом, подаваемый ток корректируют, когда скорректированное положение привода совпадает с положением, соответствующим требуемому положению клапана регулятора давления наддува. В некоторых примерах осуществления для сохранения требуемого подъема клапана может быть применено описанное выше управления ПИД с использованием номинальных коэффициентов усиления управления. После этапа 348 способ заканчивает исполнение.
В некоторых условиях может быть целесообразным использовать для определения максимальной допустимой силы тока либо температуры окружающей среды, либо температуры обмоток, но не обеих температур. Например, температура обмоток, но не температура окружающей среды, может быть использована, если температура окружающей среды сохраняла, по существу, постоянное значение (например, с изменениями на 5% или менее) по меньшей в течение периода пороговой длительности, причем на привод в течение этого периода подавали ток, сила которого была не менее порогового значения. В таком случае, несмотря на сохранение приблизительно неизменной температуры окружающей среды, подача тока значительной силы на привод может приводить к изменениям его температуры, которые могут не быть отражены в результатах измерения только температуры окружающей среды. В то же время, измерения температуры обмоток могут отражать такие изменения. В других сценариях, если рабочие условия не допускают определения температуры обмоток, как определено на этапе 401 способа 400, может быть использована температура окружающей среды, но не температура обмоток. Аналогичным образом, температура обмоток может быть не определена в случае неполучения достаточного числа измерений сопротивления обмоток в соответствии с этапом 408 способа 400.
Таким образом, как показано на чертежах и раскрыто в описании, способы 300 и 400 могут быть использованы для уменьшения потенциальной возможности ухудшения работы привода регулятора давления наддува и ухудшения управления наддувом, вызванной чрезмерно высокой температурой привода, с одновременной минимизацией ослабления наддува и предотвращением неполноценной работы при превышении температурой привода максимальной допустимой температуры. Кроме того, требуемое управление регулятором давления наддува может быть обеспечено как в номинальном режиме, так и в условиях ограничения силы тока, подаваемого на привод. Следует понимать, что способы 300 и 400 могут быть применены итерационно в течение всего времени работы регулятора давления наддува. Например, после выполнения этапа 342 и/или этапа 348 способ 300 может произвести возврат к этапу 302.
В соответствии с другим вариантом осуществления способ управления регулятором давления наддува (например, регулятором 200 давления наддува по фиг. 2) может включать в себя оценку силы тока электродвигателя, необходимого для обеспечения требуемого уровня наддува, и ограничение наддува в соответствии с ограничением силы тока, соответствующим температуре привода регулятора давления наддува (например, привода 202 по фиг. 2). Ограничение силы тока может быть установлено в соответствии с температурой окружающей среды, а способ может дополнительно включать в себя ограничение подачи топлива в двигатель (например, двигатель 10 по фиг. 1) в соответствии с ограничением уровня наддува.
На фиг. 500 представлены графики 500, иллюстрирующие ограничение силы тока, подаваемого на привод, и наддува в соответствии со способом 300 по фиг. 3А-В для примера ездового цикла. В число графиков 500 входит график 502 силы тока, подаваемого на привод регулятора давления наддува (например, привод 202 по фиг. 2), в диапазоне от минимального тока (например, нулевого тока, соответствующего, например, условиям отсутствия потребности в наддуве) до максимального тока (например, подаваемого в условиях потребности в максимальном наддуве). В число графиков 500 также входит график 504 уровня наддува, возникающего в результате изменений положения клапана регулятора давления наддува (например, клапана 218 по фиг. 2), приводимого в действие приводом регулятора давления наддува в соответствии с подаваемым на него током.
Как показано на графиках, в течение первого периода t1 затребован максимальный наддув, причем уровни наддува, предшествующие требованию максимального наддува и следующие за ним, близки к максимуму. В первого периода U определен первый максимальный допустимый ток 506, который может быть подан на привод и обозначен штриховой линией. Первый максимальный допустимый ток 506 определен в соответствии с максимальной допустимой температурой привода, как описано выше. Однако требуемые уровни тока, необходимые для получения требуемых уровней наддува в течение периода t1, превосходят первый максимальный допустимый ток 506. В связи с этим сила тока, подаваемого на привод, ограничена первым максимальным допустимым током 506 (для ясности подаваемый ток представлен на фиг. 5 несколько меньшим первого максимального допустимого тока). Уровни токов, превосходящие первый максимальный допустимый ток 506, которые могли бы быть поданы на привод в отсутствие ограничений, обозначены на фиг. 5 пунктирными линиями. На графике 504 также представлено соответствующее уменьшение наддува, а также уровень наддува, который мог бы быть получен без ограничения силы тока, обозначенный пунктирными линиями.
Аналогичным образом, в течение периода t2 снова затребован максимальный наддув при сходных высоких уровнях наддува. Второй максимальный допустимый ток 508 определен, как описано выше. Однако второй максимальный допустимый ток 508 меньше, чем первый максимальный допустимый ток 506, например, в связи с увеличением температуры окружающей среды регулятора давления наддува и/или увеличением суммарного тока, подаваемого на привод в течение периода t2 по сравнению с периодом t1. В связи с этим сила тока, подаваемого на привод, ограничена вторым максимальным допустимым током 508 (для ясности подаваемый ток представлен на фиг. 5 несколько меньшим второго максимального допустимого тока). Уровни токов, превосходящие второй максимальный допустимый ток 508, которые могли бы быть поданы на привод в отсутствие ограничений, обозначены на фиг. 5 пунктирными линиями. На графике 504 также представлено соответствующее уменьшение наддува, а также уровень наддува, который мог бы быть получен без ограничения силы подаваемого тока, обозначенный пунктирными линиями. Как было описано выше, различные действия могут быть предприняты в течение периодов ограничения наддува в связи с ограничением силы подаваемого тока, например, ограничение подачи топлива в соответствующий двигатель.
В число графиков 500 также входит график 510, иллюстрирующий корректировку коэффициентов усиления управления. В течение периодов t1 и t2 ограничения силы тока, подаваемого на привод, один или более коэффициентов усиления управления, используемых для управления приводом регулятора давления наддува, уменьшают по сравнению с их номинальными значениями, используемыми до начала периода t1, между периодами t1 и t2 и после окончания периода t2. График 520 также иллюстрирует использование фильтрации для обеспечения постепенности переходов от использования номинальных коэффициентов усиления управления к использованию скорректированных коэффициентов усиления управления и обратно. Таким образом, в данном примере осуществления в определенные моменты могут быть использованы коэффициенты усиления управления, промежуточные между соответствующими номинальными и скорректированными значениями.
Следует понимать, что графики 500 представлены для облегчения понимания и не налагают каких-либо ограничений. Например, формы кривых на графиках 502, 504 и 520, длительность представленных на них временных промежутков, значения первого и второго максимальных допустимых токов 506 и 508, а также степень ограничения силы подаваемого тока и наддува представлены исключительно в иллюстративных целях и могут быть преувеличены по сравнению с реальной работой регулятора давления наддува и транспортного средства.
Следует отметить, что вышеописанные процедуры управления и оценки могут быть применены в системах двигателей и/или транспортных средств разных конфигураций. Описанные способы и процедуры управления могут быть сохранены в виде исполнимых инструкций в энергонезависимой памяти и могут быть исполнены системой управления, содержащей контроллер, в сочетании с различными датчиками, приводами и другим оборудованием двигателя. Конкретные описанные процедуры могут представлять одну или более из неограниченного числа стратегий обработки, таких как событийная стратегия, стратегия прерываний, многозадачная стратегия, многопоточная стратегия и т.п. Таким образом, различные представленные действия, операции и/или функции могут быть выполнены в представленной последовательности, выполнены параллельно или, в некоторых случаях, пропущены. Аналогичным образом, данный порядок выполнения не обязательно необходим для осуществления характеристик и преимуществ описанных вариантов осуществления изобретения, но приведен для ясности представления и описания. Одно или более из представленных действий, операций и/или функций могут быть выполнены неоднократно в зависимости от конкретной используемой стратегии. Кроме того, описанные действия, операции и/или функции могут быть графическим представлением кода, программируемого в энергонезависимой, пригодной для чтения компьютером памяти средств хранения данных в системе управления двигателем, в которой обеспечивают производство описанных действий путем исполнения инструкций в системе, содержащей различные аппаратные компоненты двигателя в сочетании с электронным контроллером.
Следует понимать, что описанные конфигурации и процедуры представлены в качестве примера, а данные конкретные варианты осуществления не налагают каких-либо ограничений, поскольку могут быть предусмотрены многочисленные другие варианты. Например, вышеописанная технология может быть применена к двигателям типов V-6, I-4, I-6, V-12, с четырьмя оппозитными цилиндрами и других типов. В объем настоящего изобретения входят все новые и неочевидные сочетания и подсочетания различных систем и конфигураций, а также другие раскрытые характеристики, функции и/или свойства.
В нижеследующих пунктах формулы изобретения в частности определены некоторые сочетания и подсочетания, рассматриваемые как новые и неочевидные. В пунктах формулы изобретения может быть упомянут «некоторый» элемент или «первый» элемент или использованы другие эквивалентные формулировки. Следует понимать, что такие пункты формулы изобретения охватывают включение одного или более таких элементов, не требуя и не исключая наличие двух или более таких элементов. Притязания на другие сочетания и подсочетания раскрытых характеристик, функций, элементов и/или свойств могут быть осуществлены путем внесения поправок в формулу настоящего изобретения или представления новых пунктов формулы изобретения в настоящей заявке или родственной заявке. Такие пункты формулы изобретения, охват которых может быть более широким или более узким, чем охват исходной формулы изобретения, равным ему или отличным от него, следует считать включенными в пределы объема настоящего изобретения.
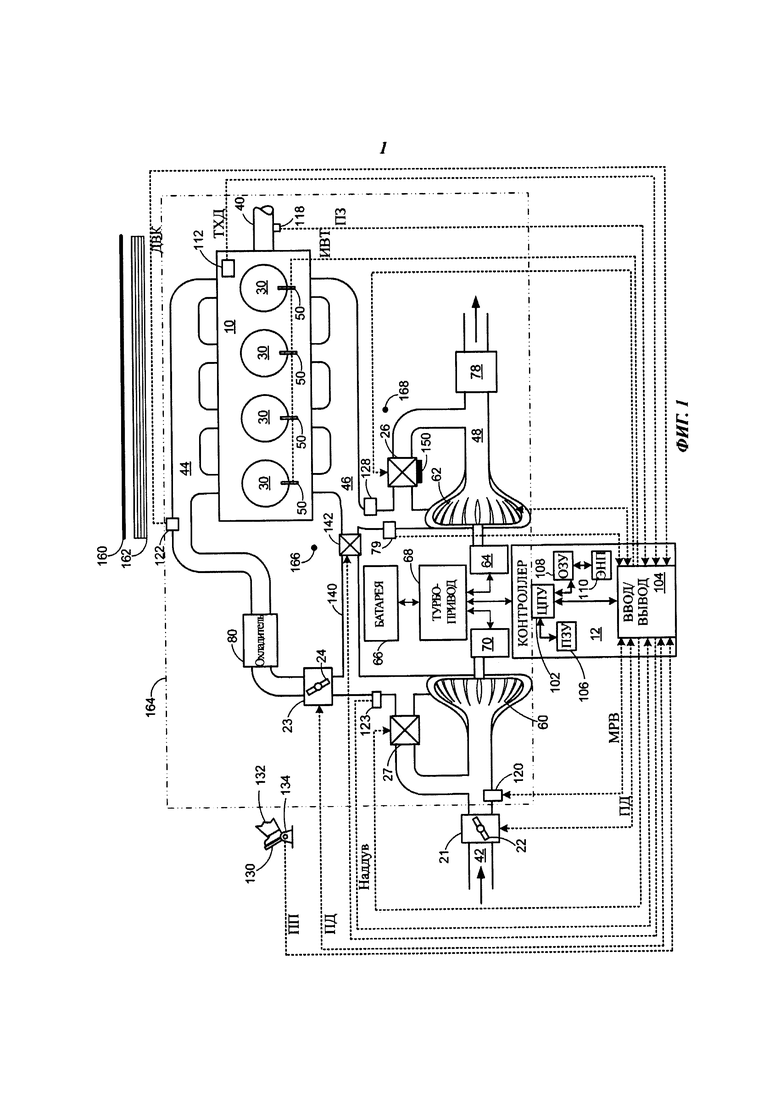
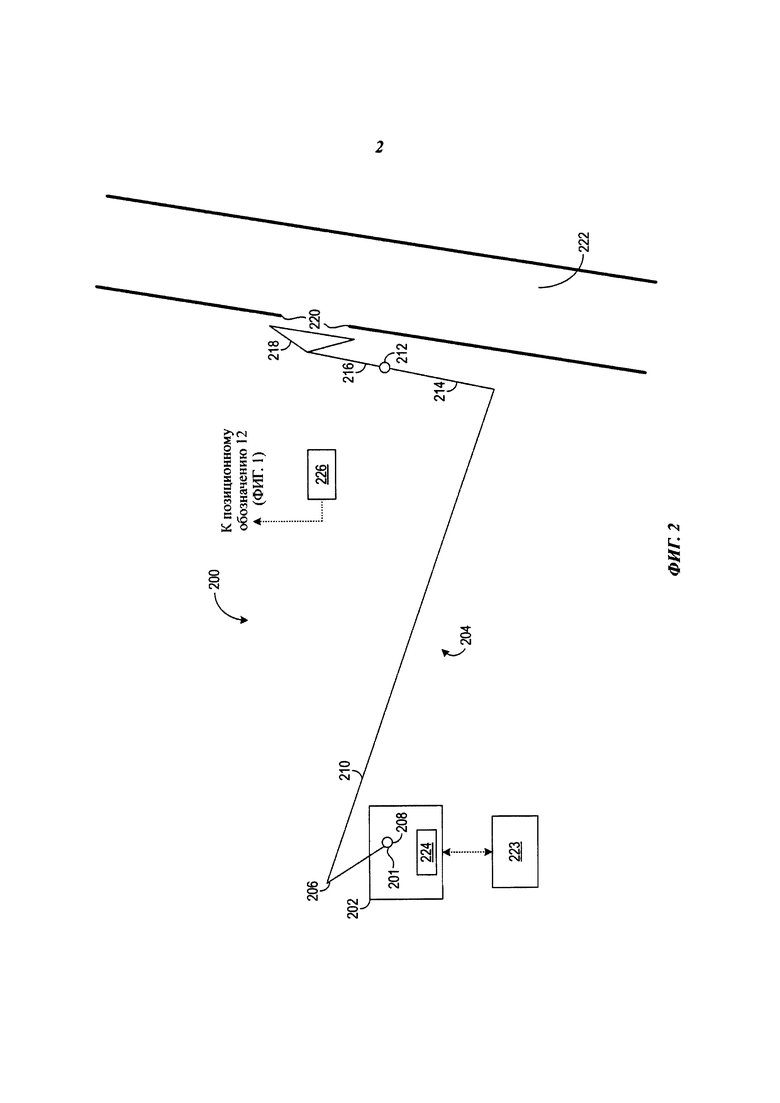
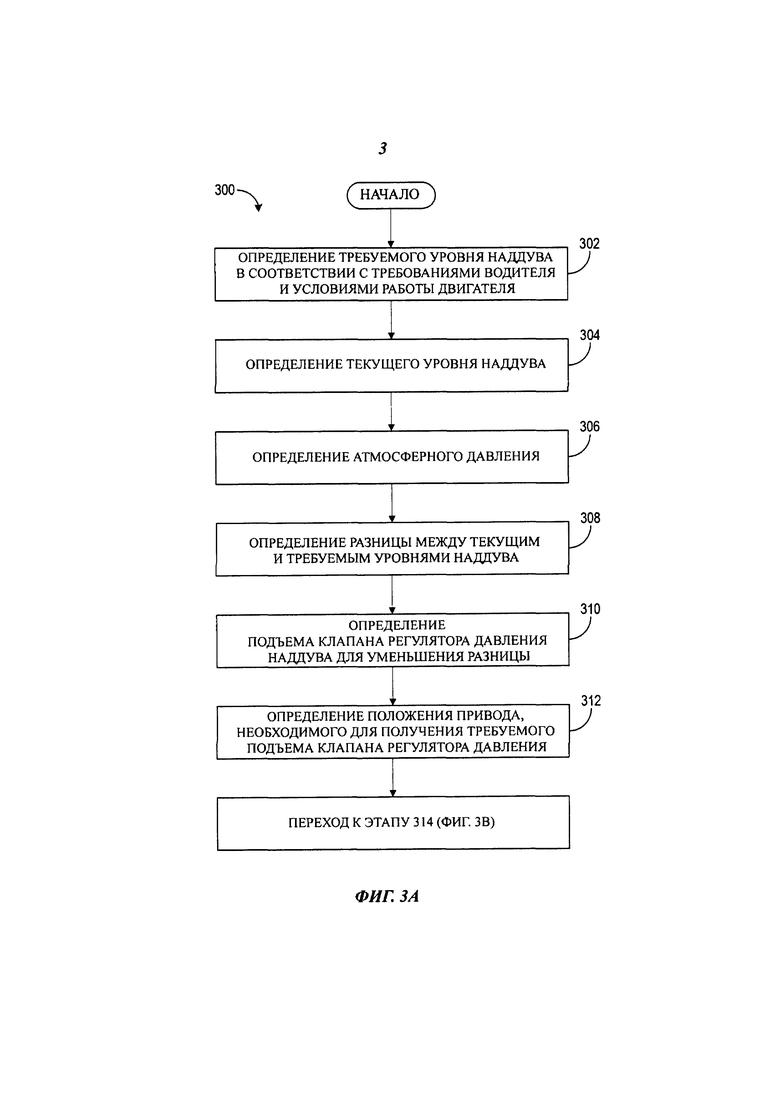
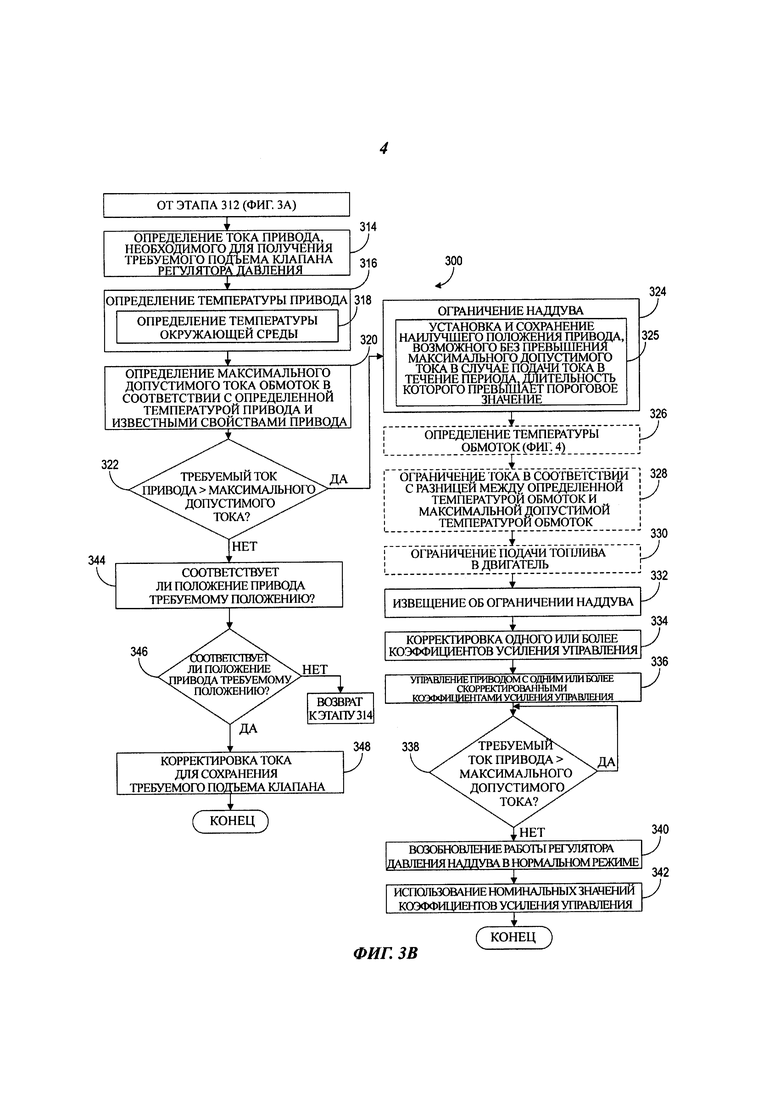
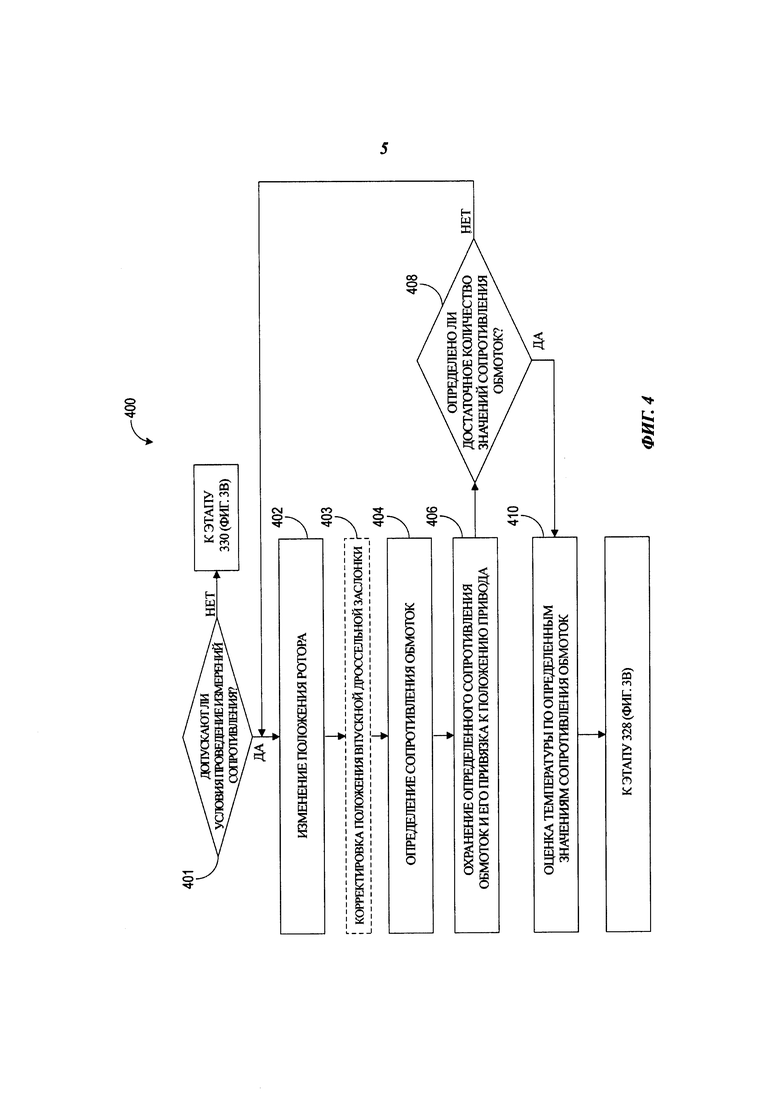
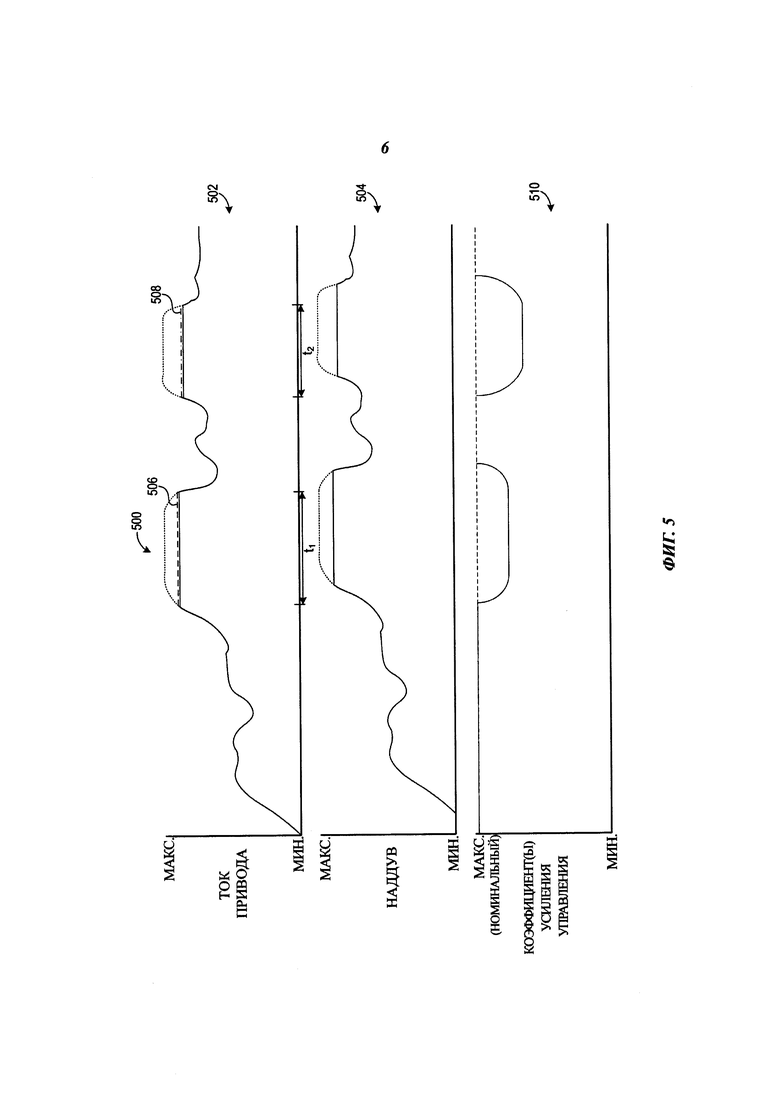
Изобретение может быть использовано в двигателях внутреннего сгорания. Предложен способ управления наддувом. Корректировка одного или более коэффициентов усиления контроллера регулятора (26) давления наддува в случае ограничения силы тока, подаваемого на привод регулятора давления наддува. Ограничение силы тока выполняется при превышении температурой привода регулятора давления наддува порогового значения. Раскрыты система и способ управления наддувом. Технический результат заключается в предотвращении повреждения привода регулятора давления наддува. 3 н. и 17 з.п. ф-лы, 6 ил.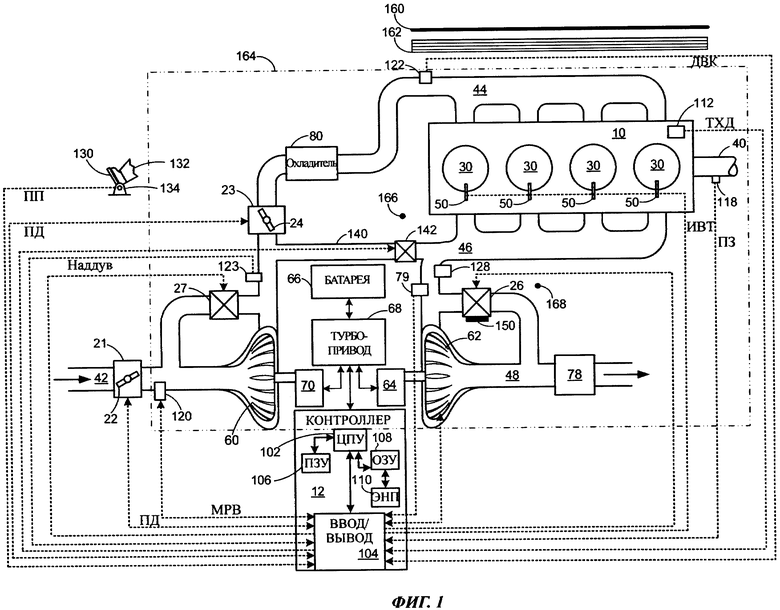
1. Способ управления наддувом, включающий в себя
корректировку одного или более коэффициентов усиления контроллера регулятора давления наддува в случае ограничения силы тока, подаваемого на привод регулятора давления наддува, выполняемого при превышении температурой привода регулятора давления наддува порогового значения.
2. Способ по п. 1, в котором корректировка одного или более коэффициентов усиления контроллера регулятора давления наддува включает в себя уменьшение таких одного или более коэффициентов усиления контроллера регулятора давления наддува по сравнению с номинальными коэффициентами усиления только на время ограничения силы тока, подаваемого на привод регулятора давления наддува, и работу с использованием номинальных, не ограниченных коэффициентов усиления в иное время, во время работы двигателя без превышения температурой порогового значения.
3. Способ по п. 2, дополнительно включающий в себя ограничение подъема клапана регулятора давления наддува, соединенного с приводом регулятора давления наддува, в случае ограничения силы тока, подаваемого на привод регулятора давления наддува.
4. Способ по п. 1, в котором в число одного или более коэффициентов усиления контроллера регулятора давления наддува входят пропорциональный коэффициент усиления, интегральный коэффициент усиления и дифференциальный коэффициент усиления.
5. Способ по п. 4, в котором пропорциональный коэффициент усиления, интегральный коэффициент усиления и дифференциальный коэффициент усиления определяют вклады, соответственно, пропорциональной компоненты, интегральной компоненты и дифференциальной компоненты, суммируемые для получения выходного значения, соответствующего входному значению.
6. Способ по п. 5, в котором входное значение представляет собой расхождение между требуемым положением привода регулятора давления наддува и текущим положением привода регулятора давления наддува.
7. Способ по п. 1, в котором один или более коэффициентов усиления контроллера регулятора давления наддува определяют чувствительность установки положения клапана регулятора давления наддува.
8. Способ по п. 1, в котором температуру привода регулятора давления наддува определяют на основе сопротивления обмоток.
9. Способ по п. 1, в котором корректировка одного или более коэффициентов усиления контроллера регулятора давления наддува включает в себя фильтрацию перехода между использованием одного или более скорректированных коэффициентов усиления контроллера регулятора давления наддува и использованием соответствующих номинальных коэффициентов усиления.
10. Способ по п. 1, в котором корректировка одного или более коэффициентов усиления контроллера регулятора давления наддува пропорциональная степени превышения температурой привода регулятора давления наддува порогового значения.
11. Способ по п. 1 дополнительно включающий в себя:
определение прекращения превышения температурой привода регулятора давления наддува порогового значения после корректировки одного или более коэффициентов усиления контроллера регулятора давления наддува в случае ограничения силы тока, подаваемого на привод регулятора давления наддува; и
установку соответствующих номинальных значений для одного или более коэффициентов усиления контроллера регулятора давления наддува.
12. Способ управления наддувом, включающий в себя:
ограничение силы тока, подаваемого на привод регулятора давления наддува, в случае возникновения определенных температурных условий; и
корректировку одного или более коэффициентов усиления управления приводом регулятора давления наддува.
13. Способ по п. 12, в котором температурные условия вызывают ограничение силы тока, подаваемого на привод регулятора давления наддува, при превышении температурой привода регулятора давления наддува порогового значения.
14. Способ по п. 12, в котором в число одного или более коэффициентов усиления управления приводом регулятора давления наддува входят пропорциональный коэффициент усиления, интегральный коэффициент усиления и дифференциальный коэффициент усиления.
15. Способ по п. 12, в котором корректировка одного или более коэффициентов усиления управления приводом регулятора давления наддува включает в себя уменьшение таких одного или более коэффициентов усиления контроллера регулятора давления наддува по сравнению с номинальными коэффициентами усиления, используемыми в отсутствие ограничения силы тока, подаваемого на привод регулятора давления наддува.
16. Способ по п. 12, в котором корректировка одного или более коэффициентов усиления управления приводом регулятора давления наддува включает в себя фильтрацию перехода между использованием одного или более скорректированных коэффициентов усиления управления приводом регулятора давления наддува и использованием соответствующих номинальных коэффициентов усиления.
17. Система управления наддувом, содержащая:
турбокомпрессор, содержащий регулятор давления наддува, содержащий привод регулятора давления наддува, соединенный с клапаном регулятора давления наддува; и
контроллер, выполненный с возможностью приведения в действие привода регулятора давления наддува в соответствии с требуемым уровнем наддува с использованием одного или более коэффициентов усиления управления, выбранных в соответствии с температурой привода регулятора давления наддува.
18. Система по п. 17, в которой при превышении температурой привода регулятора давления наддува порогового значения выбирают один или более уменьшенных коэффициентов усиления управления, и
в которой при температуре привода регулятора давления наддува, равной пороговому значению или меньшей его, выбирают один или более номинальных коэффициентов усиления управления, причем один или более номинальных коэффициентов усиления управления больше одного или более уменьшенных коэффициентов усиления управления.
19. Система по п. 17, в которой один или более коэффициентов усиления управления дополнительно выбирают в соответствии с подачей тока на привод регулятора давления наддува.
20. Система по п. 17, в которой в число одного или более коэффициентов усиления управления наддува входят пропорциональный коэффициент усиления, интегральный коэффициент усиления и дифференциальный коэффициент усиления.
| JP 5155911 B2, 06.03.2013 | |||
| US 2005092949 A1, 05.05.2005 | |||
| US 2011073089 A1, 31.03.2011 | |||
| US 2013312406 A1, 28.11.2013 | |||
| КОНТРОЛЛЕР | 2005 |
|
RU2373560C2 |
| Электрический контактор с гидравлическим приводом | 1961 |
|
SU143451A1 |

