Текст описания приведен в факсимильном виде.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ И СПОСОБЫ ДЛЯ СГЛАЖИВАНИЯ КОВАРИАЦИИ | 2020 |
|
RU2815754C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ СООТНОШЕНИЯ ВОЗДУХ/ТОПЛИВО ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2005 |
|
RU2394166C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ С ИСПОЛЬЗОВАНИЕМ АЛГОРИТМА МОДУЛЯЦИИ | 2005 |
|
RU2372639C2 |
| Способ адаптации антенной решетки градиентной процедурой с переменным шагом | 2021 |
|
RU2788589C1 |
| СПОСОБ И СИСТЕМА ОЦЕНКИ ЗОНЫ ПОПАДАНИЯ БОЕВОЙ НАГРУЗКИ, ЗАПУСКАЕМОЙ С ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2473861C2 |
| СПОСОБ И УСТРОЙСТВО АНАЛИЗА БАЛЛИСТОКАРДИОГРАФИЧЕСКИХ СИГНАЛОВ | 2009 |
|
RU2517583C2 |
| ВИЗУАЛИЗАЦИЯ ЗОНДА, ОСНОВАННАЯ НА МЕХАНИЧЕСКИХ СВОЙСТВАХ | 2009 |
|
RU2521689C2 |
| УСТРОЙСТВО ДЛЯ РАСШИРЕНИЯ ПОЛОСЫ ЧАСТОТ | 2010 |
|
RU2552184C2 |
| Адаптивная система помощи при движении задним ходом автомобиля с прицепом | 2018 |
|
RU2702199C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ГИБРИДНОЙ КОРРЕКЦИИ С РЕШАЮЩЕЙ ОБРАТНОЙ СВЯЗЬЮ | 2003 |
|
RU2328081C2 |
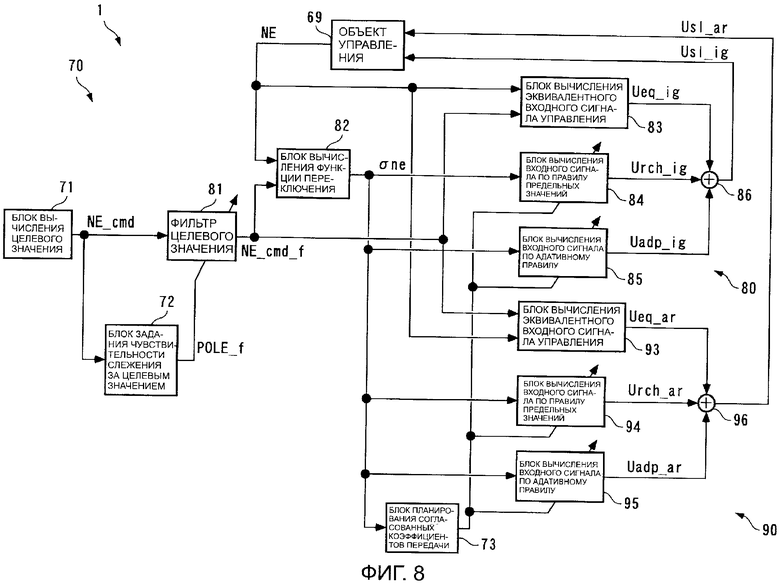
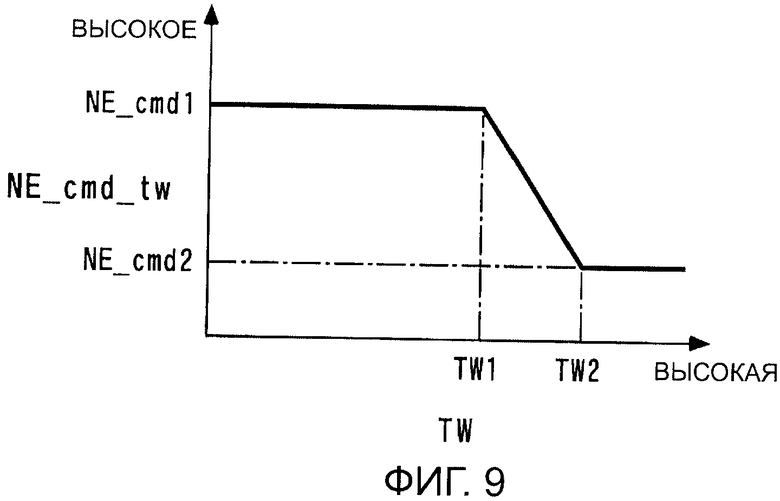
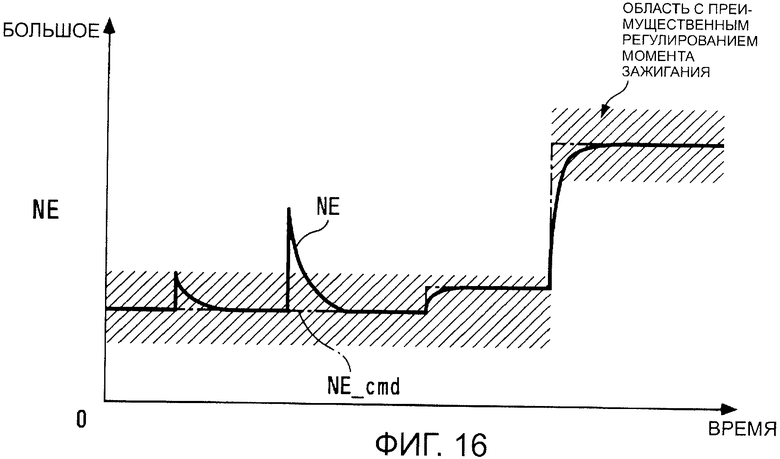
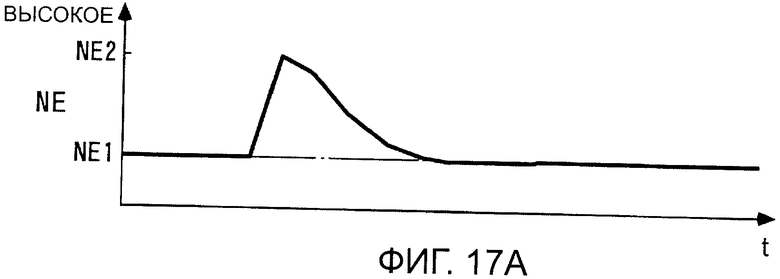
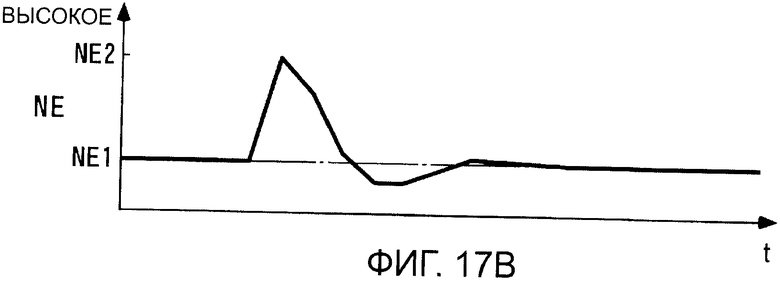
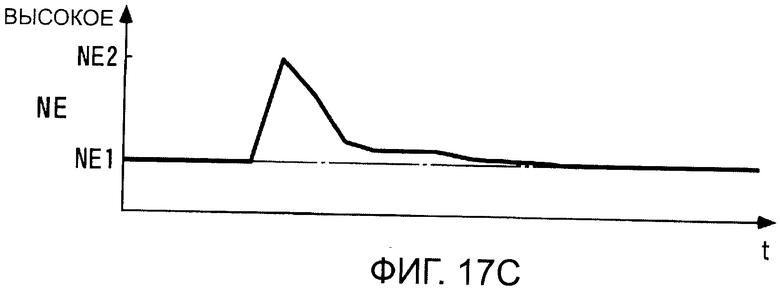
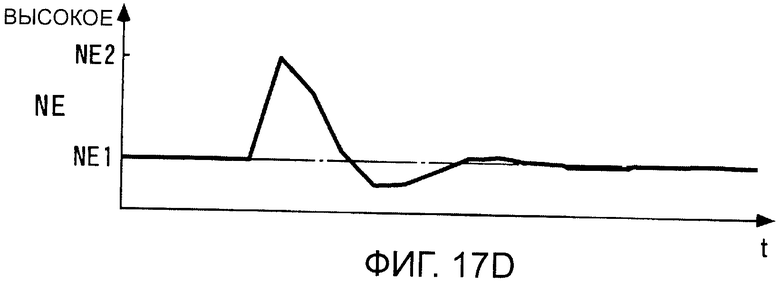
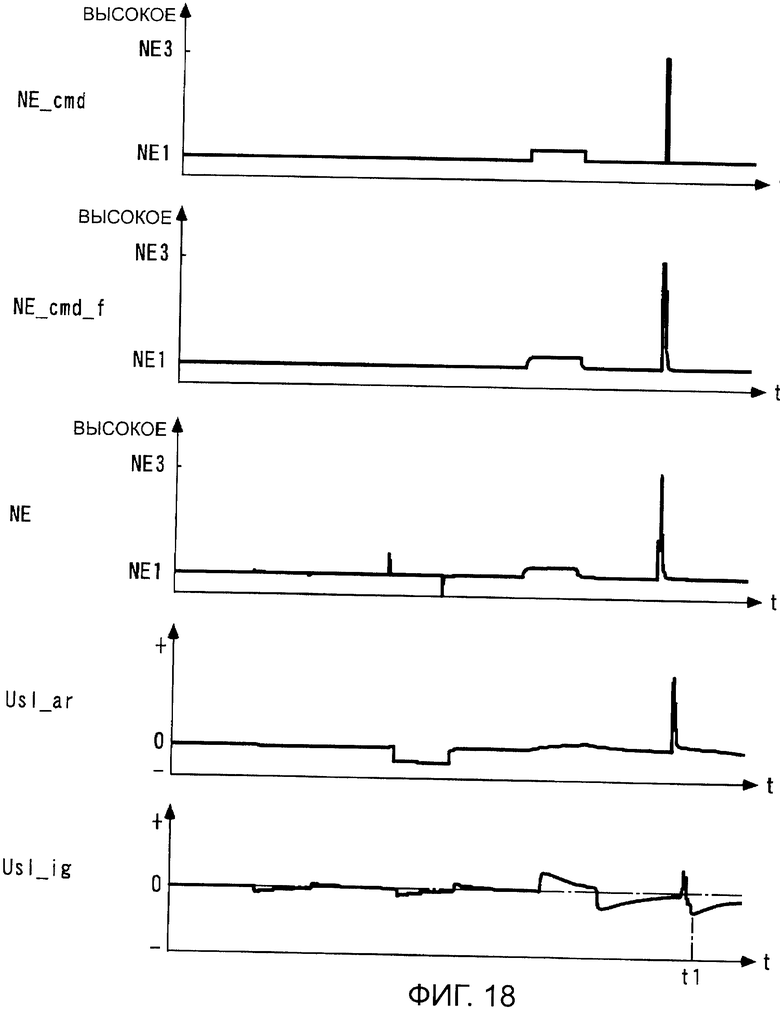
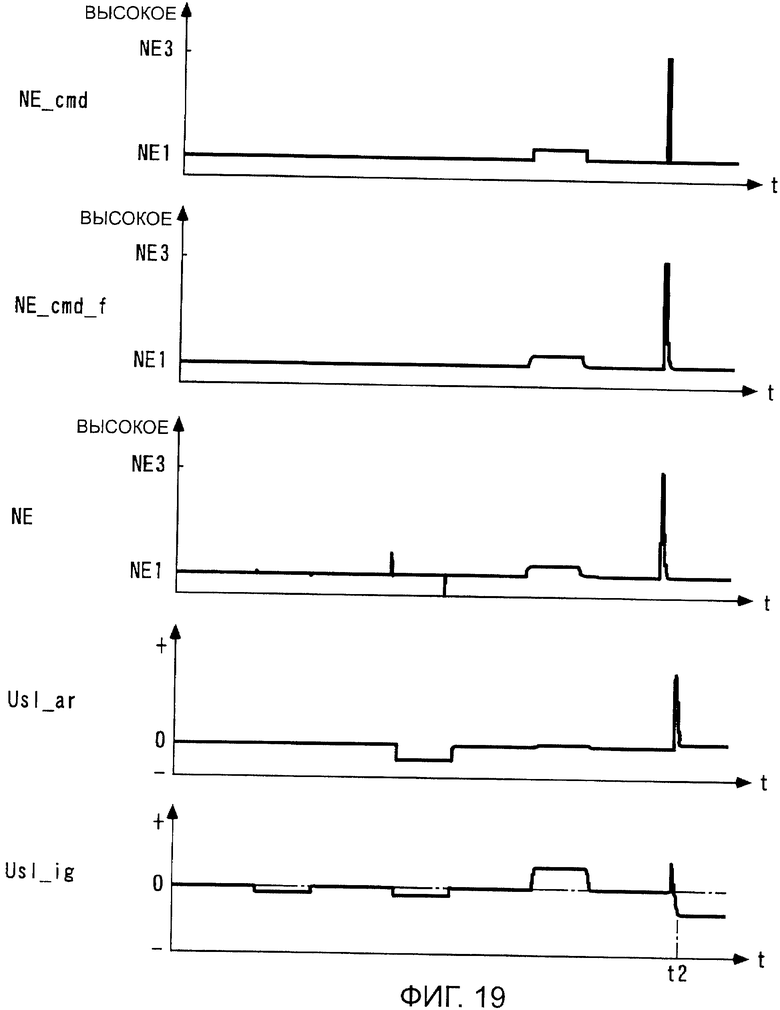
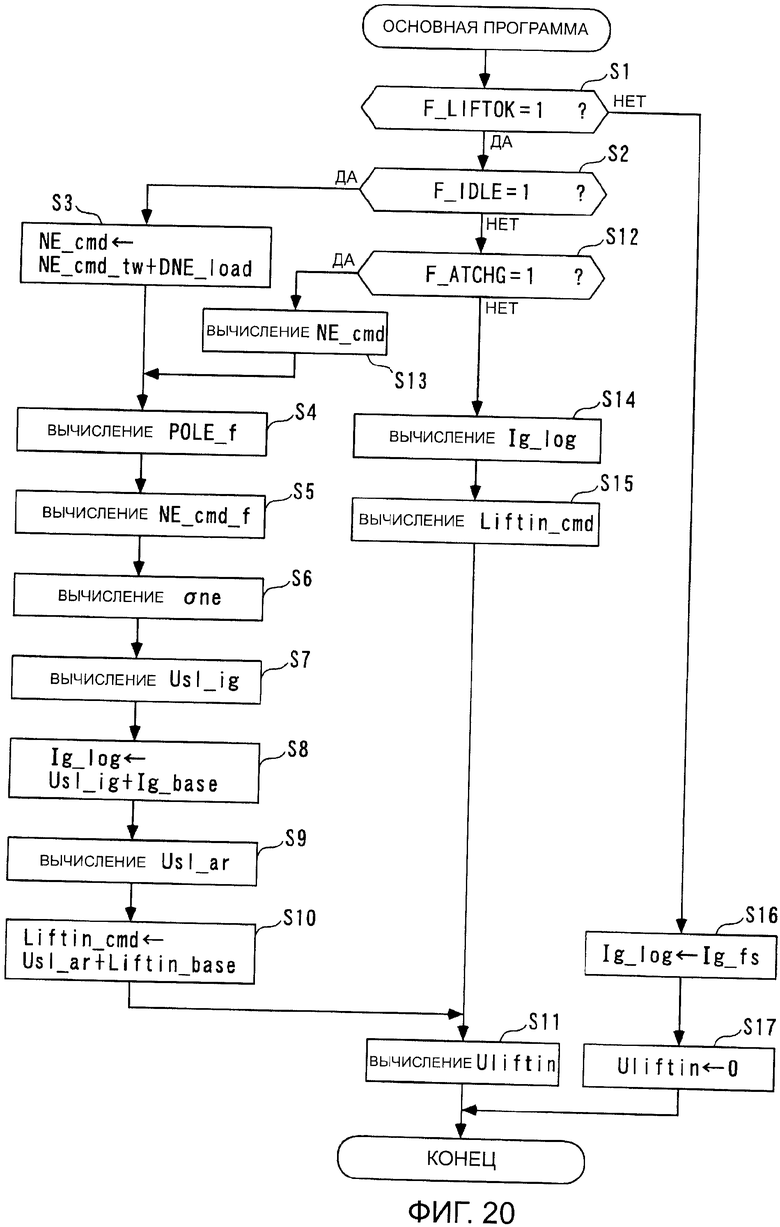
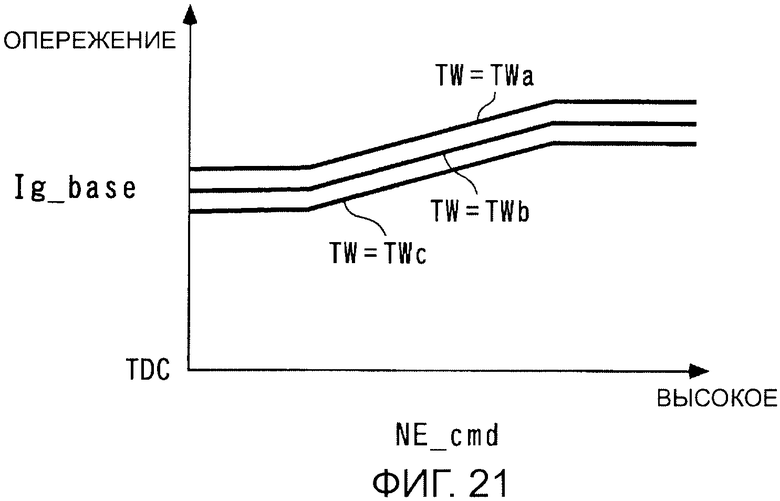
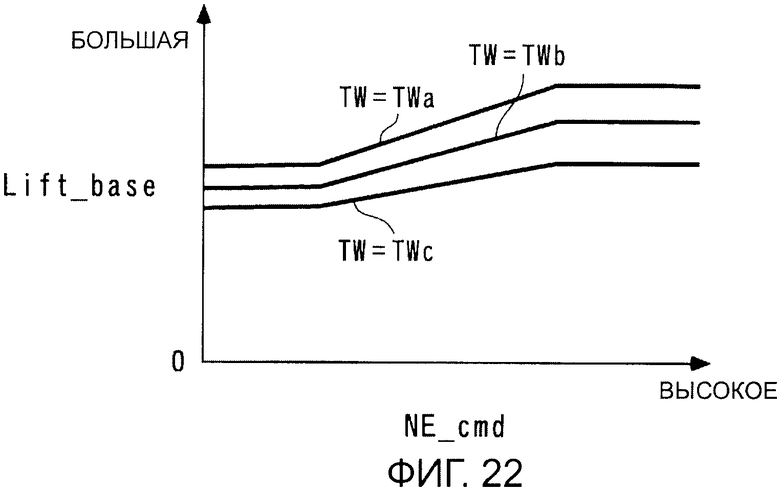
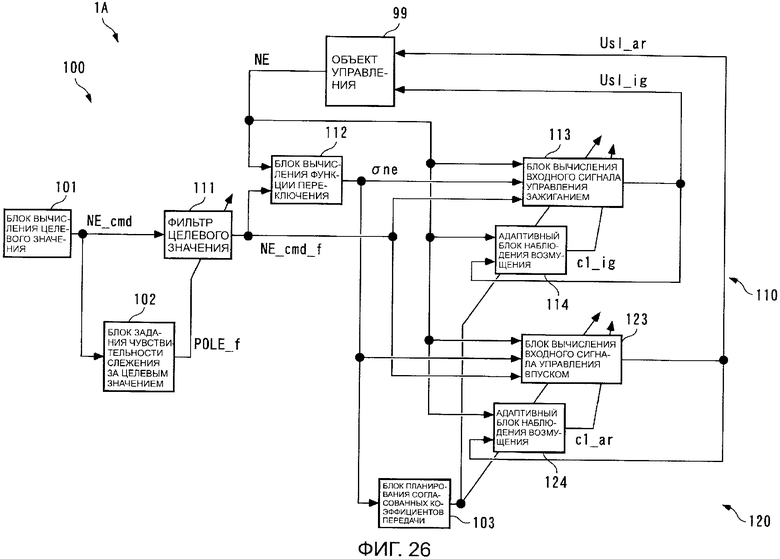
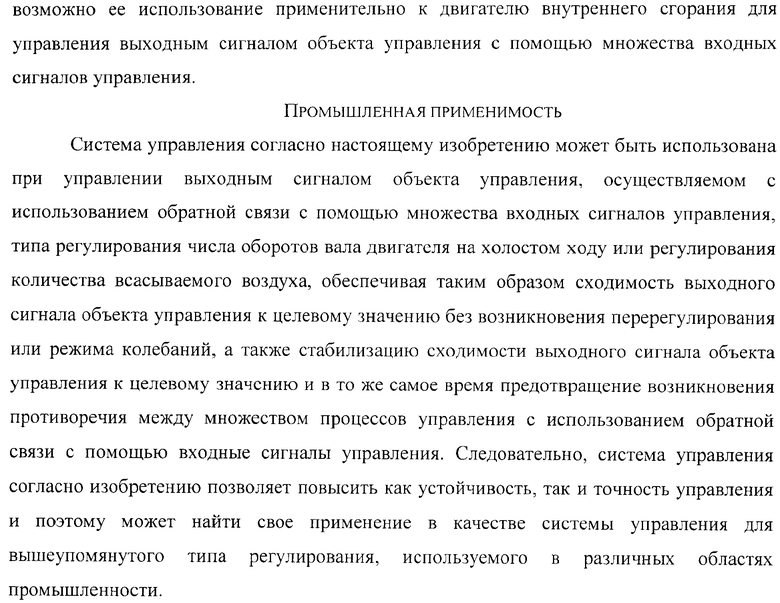
Изобретение относится к системе управления выходным сигналом объекта управления с использованием обратной связи посредством множества входных сигналов управления. Предлагаемый контроллер обеспечивает технический результат - возможность повышения как устойчивости управления, так и точности управления в случае управления выходным сигналом объекта управления с использованием обратной связи посредством множества входных сигналов управления. Электронное устройство 2 управления в составе системы 1 управления регулирует число оборотов вала двигателя NE во время работы на холостом ходу с помощью входного сигнала управления зажиганием Usl-ig и входного сигнала управления впуском Usl-ar. Электронное устройство управления вычисляет целевое число оборотов NE-cmd в соответствии с температурой охлаждающей среды двигателя TW или т.п.и определяет входной сигнал управления зажиганием Usl-ig и входной сигнал управления впуском Usl-ar с помощью множества алгоритмов управления режимом скольжения с двумя степенями свободы типа фильтра заданного целевого значения, совместно использующих одну функцию переключения так, что число оборотов вала двигателя NE сходится к целевому числу оборотов NE-cmd. 2 н.и 14 з.п. ф-лы, 45 ил.
1. Система управления для управления выходным сигналом объекта управления с помощью множества входных сигналов управления, содержащая:
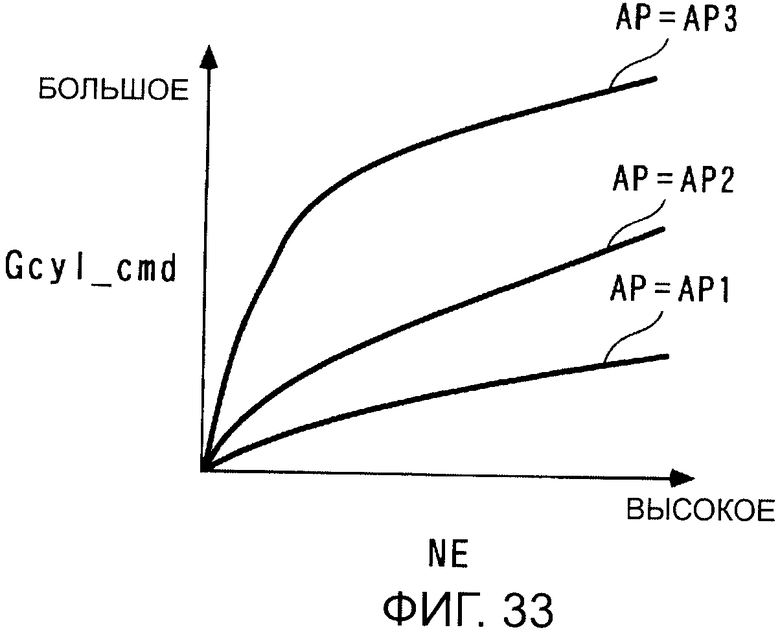
средство вычисления целевого значения для вычисления целевого значения в качестве цели выходного сигнала объекта управления в соответствии с состоянием объекта управления;
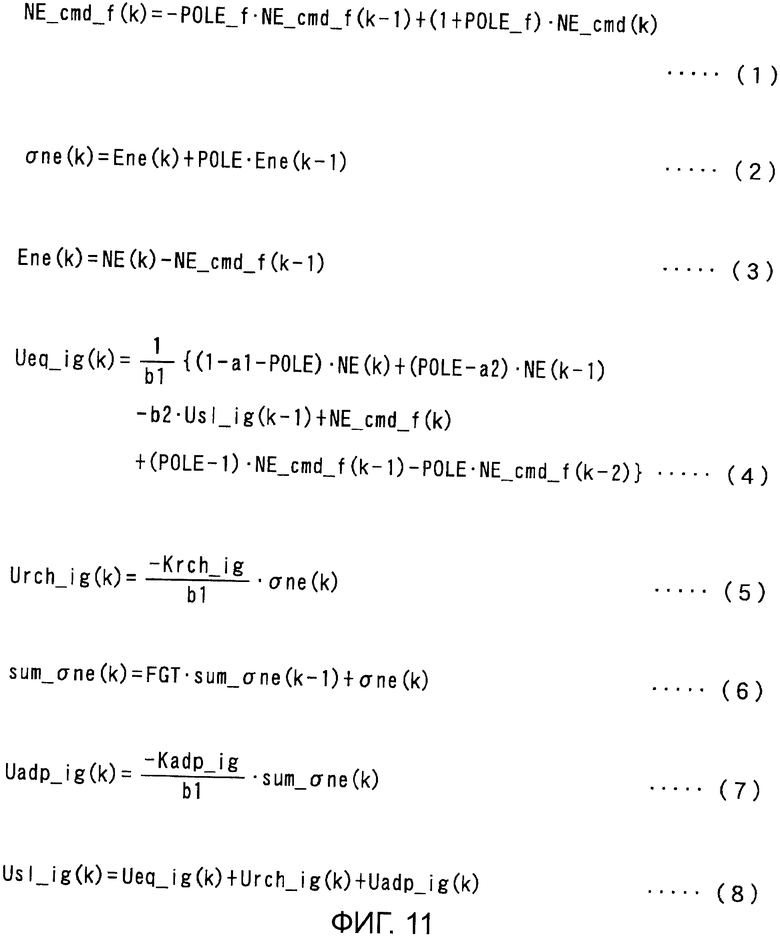
средство вычисления целевого значения результата фильтрации для вычисления одного целевого значения результата фильтрации для задания чувствительности слежения выходного сигнала объекта управления за целевым значением путем выполнения определенного процесса фильтрации над вычисленным целевым значением; и
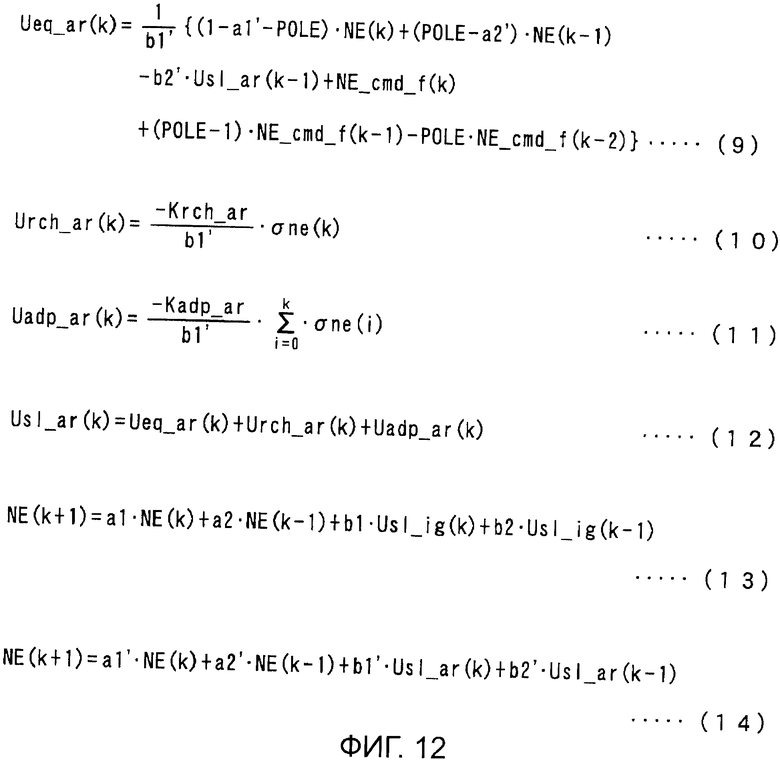
средство вычисления входного сигнала управления для вычисления входных сигналов управления с помощью множества соответствующих определенных алгоритмов управления с обратной связью, осуществляемого так, что выходной сигнал объекта управления сходится к вычисленному одному целевому значению фильтрации.
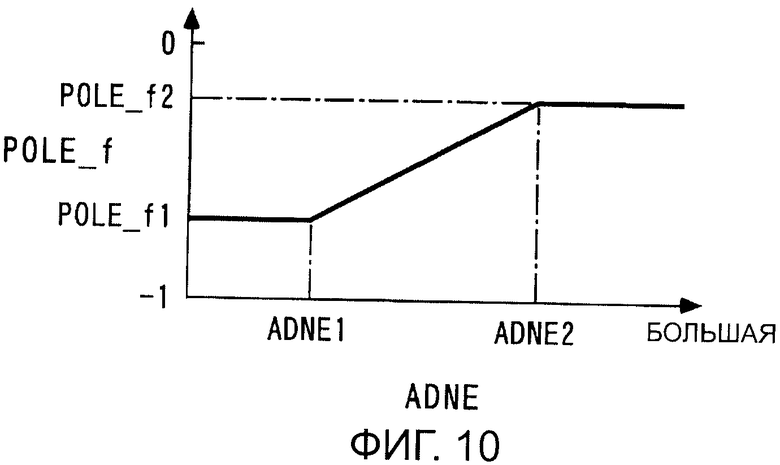
2. Система управления по п.1, отличающаяся тем, что указанное средство вычисления целевого значения результата фильтрации вычисляет одно целевое значение результата фильтрации так, что чувствительность слежения выходного сигнала объекта управления за целевым значением повышается с увеличением степени изменения целевого значения.
3. Система управления по п.1, отличающаяся тем, что определенные алгоритмы управления с обратной связью сформированы с помощью множества соответствующих определенных алгоритмов управления с возможностью назначения чувствительности, а
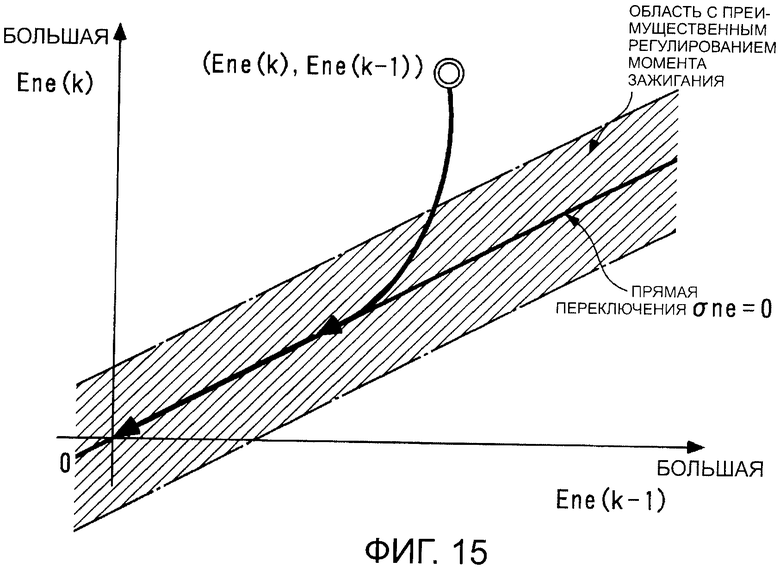
указанное средство вычисления входного сигнала управления вычисляет входные сигналы управления при совместном использовании одной линейной функции, определяющей сходимость и скорость сходимости выходного сигнала объекта управления к одному целевому значению результата фильтрации, в определенных алгоритмах управления с возможностью назначения чувствительности.
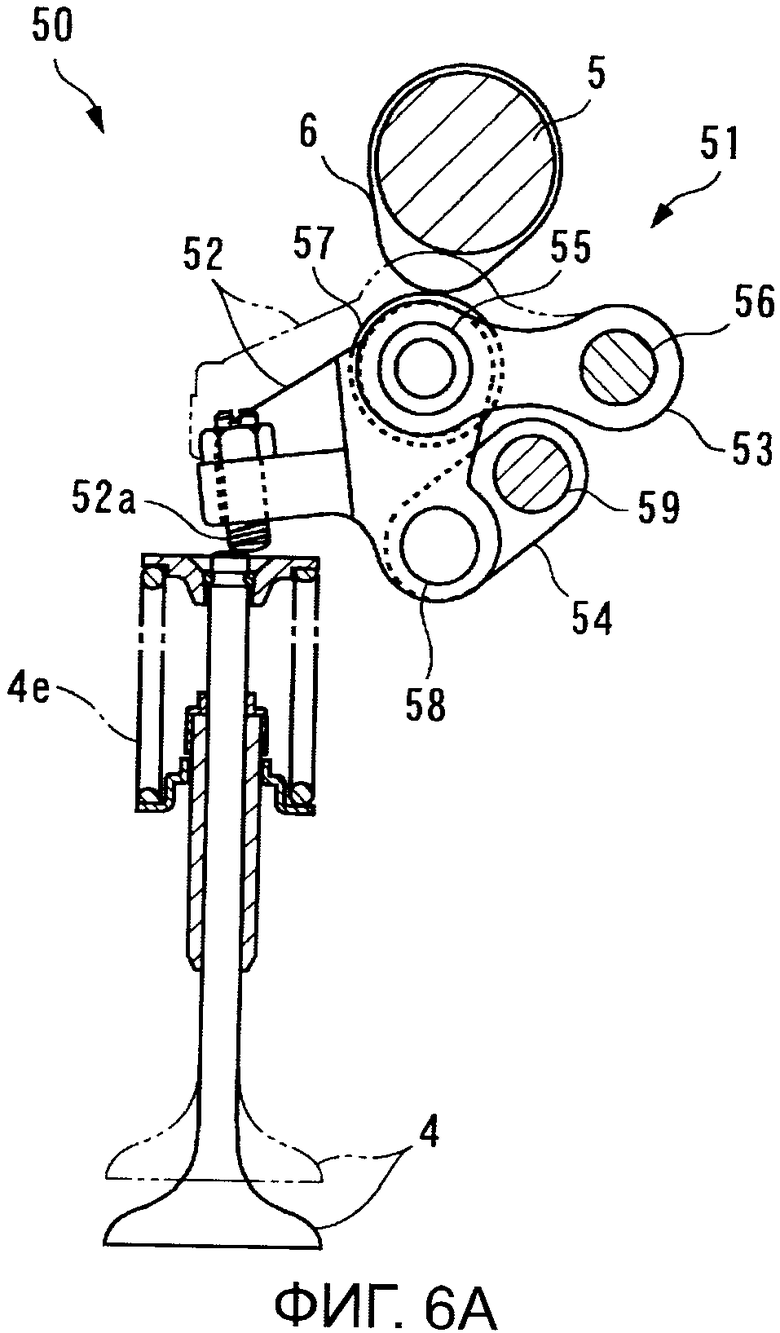
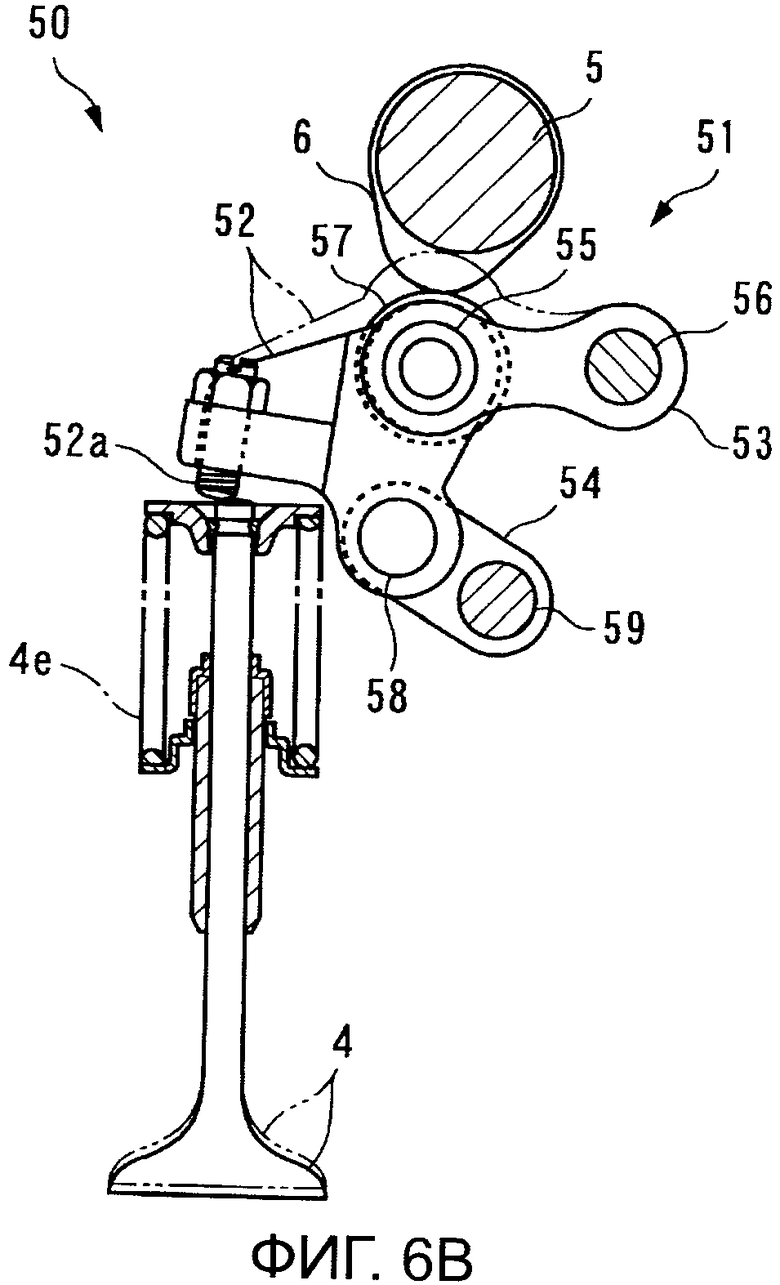
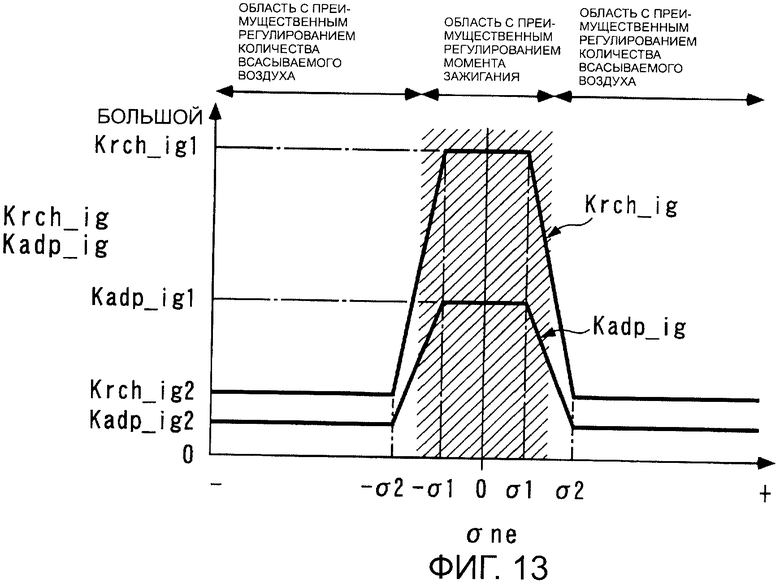
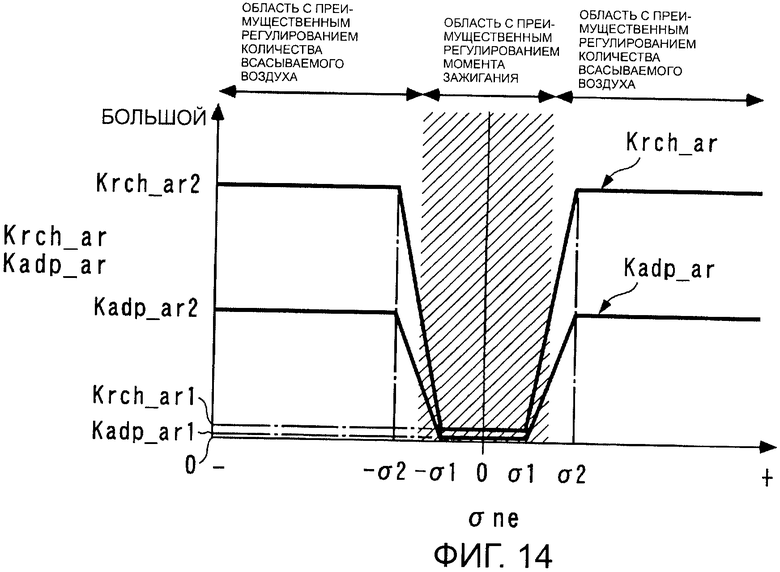
4. Система управления по п.1, отличающаяся тем, что выходной сигнал объекта управления представляет собой число оборотов вала двигателя внутреннего сгорания, а входные сигналы управления содержат входной сигнал управления для регулирования количества воздуха, всасываемого двигателем, и входной сигнал управления для регулирования момента зажигания в двигателе.
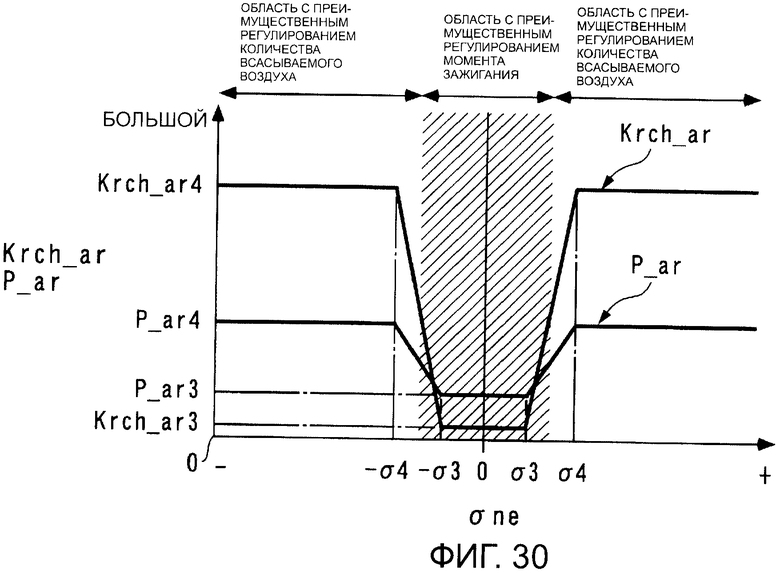
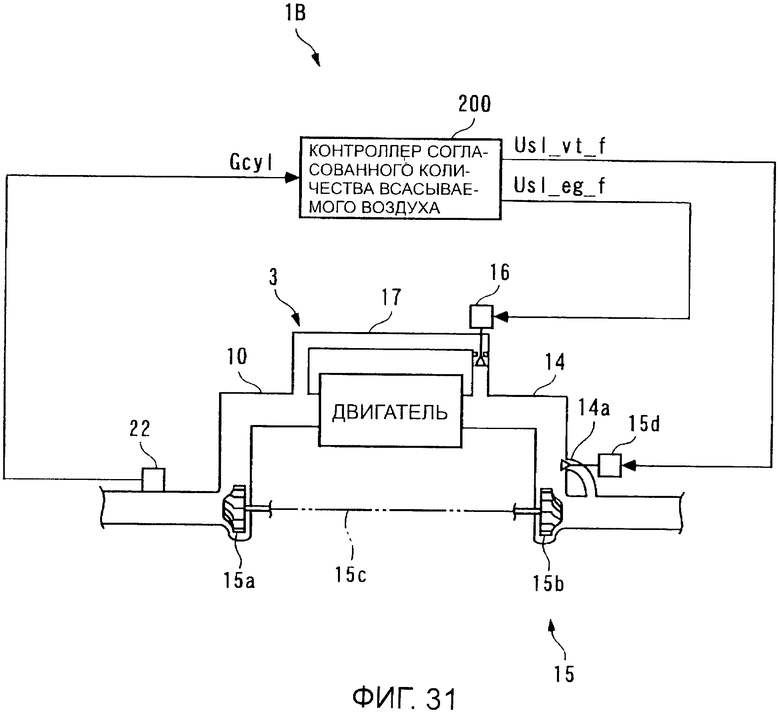
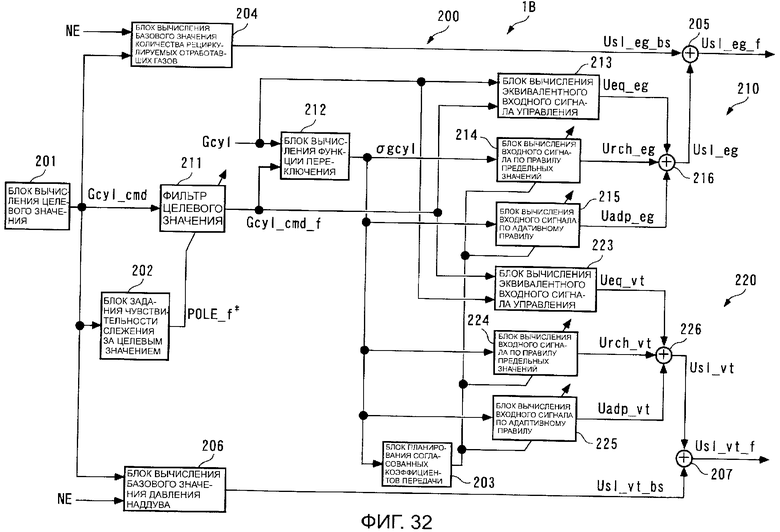
5. Система управления по п.1, отличающаяся тем, что выходной сигнал объекта управления представляет собой количество воздуха, всасываемого двигателем внутреннего сгорания, а
входные сигналы управления содержат входной сигнал управления для регулирования давления наддува двигателя и входной сигнал управления для регулирования количества рециркулируемых отработавших газов двигателя.
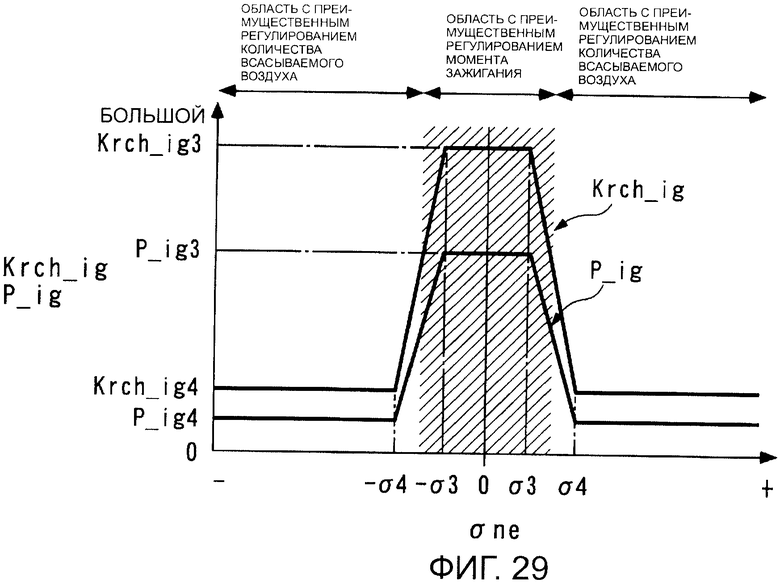
6. Система управления по п.3, отличающаяся тем, что указанное средство вычисления входного сигнала управления задает соответствующие коэффициенты передачи, используемые при вычислении входных сигналов управления, в соответствии со значением одной линейной функции.
7. Система управления по п.3, отличающаяся тем, что указанное средство вычисления входного сигнала управления вычисляет по меньшей мере один из входных сигналов управления в соответствии с интегральным значением одной линейной функции при выполнении процесса забывания над интегральным значением одной линейной функции.
8. Система управления по п.3, отличающаяся тем, что дополнительно содержит средство вычисления оценочного значения возмущения для вычисления множества оценочных значений возмущения с целью компенсации возмущения и ошибок моделирования, неблагоприятно воздействующих на объект управления, с помощью соответствующих определенных алгоритмов оценки на основе модели, определяющей зависимости между каждым из оценочных значений возмущения, каждым из входных сигналов управления и выходным сигналом объекта управления, причем
определенные алгоритмы оценки задают соответствующие оценочные коэффициенты передачи оценочных значений возмущения в соответствии со значением одной линейной функции, а
указанное средство вычисления входного сигнала управления вычисляет входные сигналы управления в соответствии с соответствующим оценочным значением возмущения.
9. Система управления по п.3, отличающаяся тем, что дополнительно содержит средство вычисления оценочного значения возмущения для вычисления множества оценочных значений возмущения с целью компенсации возмущения и ошибок моделирования, неблагоприятно воздействующих на объект управления, с помощью соответствующих определенных алгоритмов оценки на основе модели, определяющей зависимости между каждым из оценочных значений возмущения, каждым из входных сигналов управления и выходным сигналом объекта управления, причем
определенные алгоритмы оценки выполняют определенный процесс забывания по меньшей мере над одним из оценочных значений возмущения, а
указанное средство вычисления входного сигнала управления вычисляет входные сигналы управления в соответствии с соответствующим оценочным значением возмущения.
10. Система управления для управления выходным сигналом объекта управления с помощью множества входных сигналов управления, содержащая:
средство вычисления целевого значения для вычисления целевого значения в качестве цели выходного сигнала объекта управления в соответствии с состоянием объекта управления; и
средство вычисления входного сигнала управления для вычисления входных сигналов управления с помощью множества соответствующих определенных алгоритмов управления с возможностью назначения чувствительности при совместном использовании одной линейной функции, определяющей сходимость и скорость сходимости выходного сигнала объекта управления к одному целевому значению результата фильтрации, в определенных алгоритмах управления с возможностью назначения чувствительности, осуществляемого так, что выходной сигнал объекта управления сходится к вычисленному целевому значению.
11. Система управления по п.10, отличающаяся тем, что указанное средство вычисления входного сигнала управления задает соответствующие коэффициенты передачи, используемые при вычислении входных сигналов управления, в соответствии со значением одной линейной функции.
12. Система управления по п.10, отличающаяся тем, что указанное средство вычисления входного сигнала управления вычисляет по меньшей мере один из входных сигналов управления в соответствии с интегральным значением одной линейной функции при выполнении процесса забывания над интегральным значением одной линейной функции.
13. Система управления по п.10, отличающаяся тем, что дополнительно содержит средство вычисления оценочного значения возмущения для вычисления множества оценочных значений возмущения с целью компенсации возмущения и ошибок моделирования, неблагоприятно воздействующих на объект управления, с помощью соответствующих определенных алгоритмов оценки на основе модели, определяющей зависимости между каждым из оценочных значений возмущения, каждым из входных сигналов управления и выходным сигналом объекта управления,
причем определенные алгоритмы оценки задают соответствующие оценочные коэффициенты передачи оценочных значений возмущения в соответствии со значением одной линейной функции, а указанное средство вычисления входного сигнала управления вычисляет входные сигналы управления в соответствии с соответствующим оценочным значением возмущения.
14. Система управления по п.10, отличающаяся тем, что дополнительно содержит средство вычисления оценочного значения возмущения для вычисления множества оценочных значений возмущения с целью компенсации возмущения и ошибок моделирования, неблагоприятно воздействующих на объект управления, с помощью соответствующих определенных алгоритмов оценки на основе модели, определяющей зависимости между каждым из оценочных значений возмущения, каждым из входных сигналов управления и выходным сигналом объекта управления, причем
определенные алгоритмы оценки выполняют определенный процесс забывания по меньшей мере над одним из оценочных значений возмущения, а
указанное средство вычисления входного сигнала управления вычисляет входные сигналы управления в соответствии с соответствующим оценочным значением возмущения.
15. Система управления по п.10, отличающаяся тем, что выходной сигнал объекта управления представляет собой число оборотов вала двигателя внутреннего сгорания, а входные сигналы управления содержат входной сигнал управления для регулирования количества воздуха, всасываемого двигателем, и входной сигнал управления для регулирования момента зажигания в двигателе.
16. Система управления по п.10, отличающаяся тем, что выходной сигнал объекта управления представляет собой количество воздуха, всасываемого двигателем внутреннего сгорания, а
входные сигналы управления содержат входной сигнал управления для регулирования давления наддува двигателя и входной сигнал управления для регулирования количества рециркулируемых отработавших газов двигателя.
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| JP 7152403 А, 16.06.1995 | |||
| ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ВПРЫСКОМ ТОПЛИВА В ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1990 |
|
RU2027050C1 |
| СПОСОБ УПРАВЛЕНИЯ МОМЕНТОМ ЗАЖИГАНИЯ И СИСТЕМА ЗАЖИГАНИЯ С ЭЛЕКТРОННЫМ РЕГУЛИРОВАНИЕМ УГЛА ОПЕРЕЖЕНИЯ ЗАЖИГАНИЯ | 1993 |
|
RU2073794C1 |
| US 6327850 В1, 11.12.2001 | |||
| US 6370473 В1, 09.04.2002. | |||

