Область техники
Настоящее изобретение относится к области топографического наблюдения и картографирования, в частности к способу проверки точности измерения компенсации наклона при RTK.
Уровень техники
С быстрым развитием спутниковых технологий определения местоположения, потребность в быстрой и точной информации о местоположении также увеличивается. В настоящее время наиболее широко используемой технологией высокоточного позиционирования является RTK (кинематическое позиционирование в реальном времени). Принципиальной особенностью технологии RTK является использование наблюдений за фазой несущего сигнала GPS и пространственной корреляции расхождений при наблюдениях между референсными станциями и мобильными станциями. Большинство расхождений в данных наблюдений мобильной станции устраняется дифференциальным образом, так что может быть реализовано высокоточное позиционирование (порядка дециметров или даже порядка сантиметров). В режиме работы RTK базовая станция передает наблюдаемые значения и информацию с координатами станции наблюдения на ровер посредством линий передачи данных. Ровер не только получает от базовой станции данные через линии передачи данных, но также собирает данные наблюдений GPS, формирует в системе дифференциальные значения наблюдений для обработки в реальном времени и дает результаты позиционирования с точностью порядка сантиметров. Весь процесс занимает менее одной секунды. Ровер напрямую включают в динамическом режиме, и он завершает поиск и решение неопределенности полного цикла в динамическом окружении. После того, как неизвестный номер полного цикла откреплен, может быть выполнена обработка каждого интервала в реальном времени. До тех пор, пока может выполняться отслеживание значений наблюдения фазы несущего сигнала более чем четырех спутников и поддерживаться необходимая геометрическая фигура, ровер может в любой момент времени предоставить результаты позиционирования с точностью порядка сантиметров. RTK (кинематическое позиционирование в реальном времени) применяет динамический дифференциальный метод в режиме реального времени для фазы несущего сигнала, поэтому точность позиционирования точки измерения может составлять порядка сантиметров, что является главным преимуществом применения GPS. RTK внедряется в области инженерного проектирования, составления топографических карт и различных топографических наблюдений и значительно повышает эффективность полевых работ.
Однако при работе одного человека метод RTK требует сохранять оборудование в максимально горизонтальном положении и избегать встряхивания, и в процессе измерения пузырек уровня должен быть выставлен строго по центру. При измерении методом RTK легко вызвать появление накопленных расхождений, если во время измерения наблюдатель непрочно удерживает центрирующий стержень или встряхивает оборудование. Результаты накопленного расхождения являются неконтролируемыми и традиционный способ измерения методом RTK не может эффективно удалять накопленные расхождения.
Для того чтобы оборудование RTK могло выполнять высокоточные измерения в областях с неблагоприятными условиями окружающей среды и свести к минимуму воздействие выполняемых человеком операций на точность измерения методом RTK, в ответ на такие требования был разработан режим измерения компенсации наклона. В настоящее время основное выпускаемое в мире оборудование RTK, производимое такими иностранными компаниями, как: GEO, Leica, Topcon, и китайские компании: HUACE, The South Group of Surveying and Mapping, Hi-Target, также постепенно оснащается функцией компенсации наклона. Однако в настоящее время не существует хорошо разработанного способа, чтобы более эффективно определять точность измерения компенсации наклона, обеспечивающего наблюдателю возможность определить, можно ли его измерить в режиме реального времени, и результат обычно получают путем анализа данных после обработки данных измерений.
Раскрытие сущности изобретения
Настоящий способ стремится обеспечить по-настоящему достоверный показатель точности измерения компенсации наклона при RTK с помощью некоторых разработанных способов измерения, полевых данных измерений, расчета данных измерений и анализа. Расхождения измерения наклона могут отображаться программным обеспечением и записываться в базу данных в режиме реального времени.
Техническое решение согласно настоящему изобретению заключается в следующем.
1. Способ проверки точности измерения компенсации наклона при RTK отличается тем, что включает следующие этапы, согласно которым:
обеспечивают оборудование RTK с модулем компенсации электронного пузырька и электронного компаса и выполняют калибровку модуля компенсации электронного пузырька и электронного компаса для обеспечения нормального и надежного отображения электронных пузырьков центрирующего стержня оборудования RTK;
устанавливают контрольную точку A и получают координаты X0, Y0, H0 точки A;
с центром в точке A, размещают конец центрирующего стержня в точке A под углом наклона α и измеряют N точек измерения компенсации наклона в каждом из восьми направлений, а именно, восточном, западном, южном, северном, юго-восточном, северо-восточном, юго-западном и северо-западном относительно координат точки А;
непрерывно выполняют наклон на угол α N раз и после каждого наклона на угол α, измеряют точки измерения компенсации наклона в восьми направлениях, то есть, восточном, западном, южном, северном, юго-восточном, северо-восточном, юго-западном и северо-западном относительно координат точки А, и записывают координаты в виде Xn, Yn, Hn;
вычисляют расхождения измерений компенсации наклона для получения горизонтального расхождения ΔS и вертикального расхождения ΔH;
при этом, когда измерение компенсации наклона выполняют на местоположении точки A, то после получения измерительным программным обеспечением RTK координат текущей позиции, горизонтальное расхождение ΔS и вертикальное расхождение ΔH, которые изменяют в реальном времени, отображают на интерфейсе измерительного программного обеспечения RTK; RTK собирает точки компенсации, и в то же время одновременно рассчитываются и записываются ΔS и ΔH устройством вывода;
когда отчет об измерении экспортируют, то измерительное программное обеспечение RTK одновременно экспортирует горизонтальное расхождение ΔS и вертикальное расхождение ΔH в раздел измерения компенсации наклона в отчете об измерении, в то же время одновременно рассчитывают максимальное горизонтальное расхождение ΔSmax и минимальное горизонтальное расхождение ΔSmin RTK при измерении компенсации наклона;
рассчитывают среднее горизонтальное расхождение ΣΔS и среднее вертикальное расхождения ΣΔH;
экспортируют данные и выполняют дисперсионный анализ для вывода статистической диаграммы расхождений.
В соответствии с вышеупомянутым способом проверки точности измерения компенсации наклона при RTK, на этапе S2 контрольную точку A устанавливают в открытом и доступном положении вне помещения.
В соответствии с вышеупомянутым способом проверки точности измерения компенсации наклона при RTK, на этапе S2 координаты X0, Y0, H0 точки A получают путем вычисления среднего значения множества измерений.
В соответствии с вышеупомянутым способом проверки точности измерения компенсации наклона при RTK, угол α составляет 5°.
В соответствии с вышеупомянутым способом проверки точности измерения компенсации наклона при RTK, формулы для расчета расхождений измерения компенсации наклона представляют собой:
горизонтальное расхождение 
вертикальное расхождение ΔH=H0-Hn.
Настоящее изобретение обеспечивает практический и выполнимый способ проверки точности измерения компенсации наклона оборудования RTK. Путем сбора центральных координат в начале и последующего сбора точек измерения компенсации в реальном времени, вычисляются, записываются и отображаются смещение и разность точек измерения по высоте. Максимальные и минимальные расхождения точек измерения компенсации вблизи местоположения точки автоматически подсчитываются, и выполняется проверка, соответствует ли точность измерения компенсации наклона оборудования RTK расчетному требованию точности. Поэтому требования к оператору сводятся к минимуму. Способ по настоящему изобретению можно использовать для определения точности измерения компенсации наклона оборудования RTK. Кроме того, способ по настоящему изобретению может быть реализован в измерительном программном обеспечении для определения, могут ли данные пользователя об измерении компенсации наклона использоваться в режиме реального времени, поэтому он обеспечивает полезный способ для лучшего использования способа измерения компенсации наклона при RTK.
Краткое описание чертежей
При ознакомлении с подробными описаниями неограничивающих вариантов осуществления со ссылкой на представленные ниже чертежи, настоящее изобретение и его признаки, аспекты и преимущества станут более понятными. Одинаковые ссылочные позиции на всех чертежах используются для обозначения одинаковых частей. Чертежи не были выполнены в соответствии с конкретными пропорциями, и внимание уделено сущности настоящего изобретения.
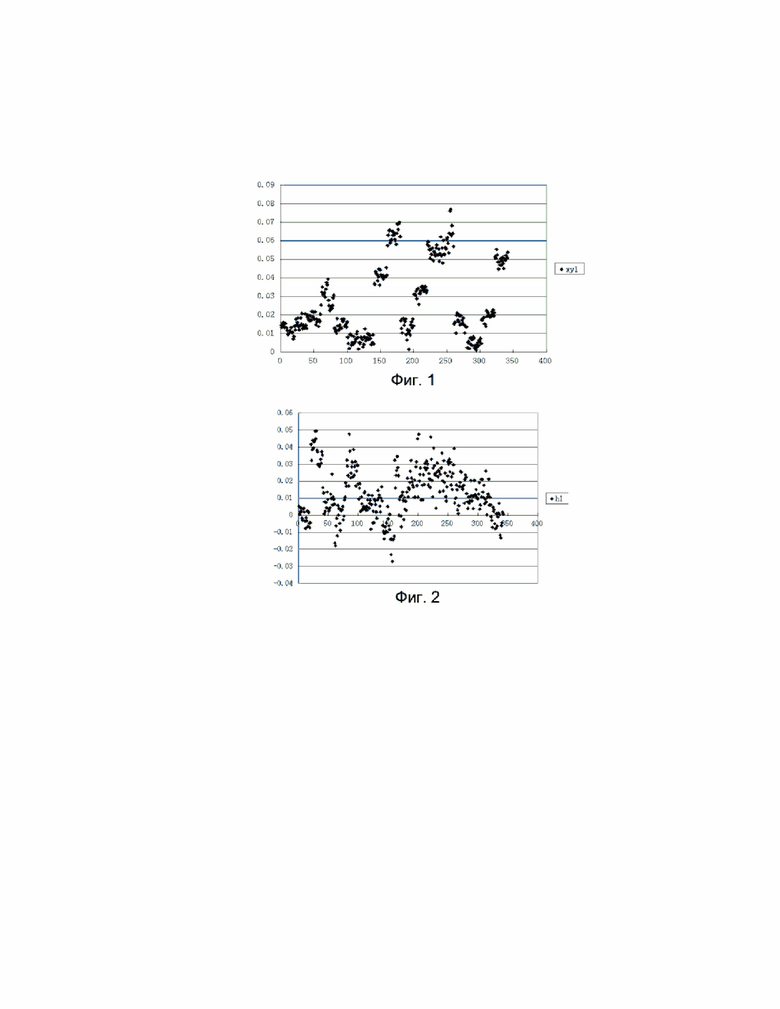
На ФИГ. 1 представлена статистическая диаграмма горизонтальных расхождений в соответствии с одним вариантом осуществления настоящего изобретения.
На ФИГ. 2 представлена статистическая диаграмма вертикальных расхождений согласно одному варианту осуществления настоящего изобретения.
Осуществление изобретения
В последующих описаниях приведены многочисленные конкретные детали для полного понимания настоящего изобретения. Однако для специалистов в данной области техники очевидно, что настоящее изобретение может быть реализовано без одной или нескольких из данных деталей. В других примерах, некоторые технические признаки, известные в данной области техники, не описаны, во избежание путаницы с настоящим изобретением.
Для полного понимания настоящего изобретения в последующих описаниях будут предоставлены подробные этапы и подробные структуры, чтобы ясно проиллюстрировать техническое решение настоящего изобретения. Предпочтительный вариант осуществления настоящего изобретения подробно описан ниже. Однако, помимо этих подробных описаний, настоящее изобретение может иметь другие варианты реализации.
Настоящее изобретение предоставляет способ проверки точности измерения компенсации наклона при RTK, включающий следующие этапы.
Сначала выполняют подготовку оборудования для проверки точности для измерения компенсации наклона RТК и подготовку для полевых испытаний. А именно, предоставляется оборудование RTK c модулем компенсации электронного пузырька и электронного компаса. Модуль компенсации электронного пузырька и электронного компаса точно калибруют в соответствии с требованиями к калибровке оборудования, а центрирующий стержень RTK калибруют для нормального и надежного отображения электронных пузырьков центрирующего стержня оборудования RTK.
Контрольную точку A устанавливают в открытом и доступном положении вне помещения. Координаты X0, Y0, H0 точки A получают путем вычисления среднего значения множества измерений.
Используя точку A в качестве центра, конец центрирующего стержня размещают в точке A под углом α наклона. Точки измерения компенсации наклона измеряют в восьми направлениях, а именно, восточном, западном, южном, северном, юго-восточном, северо-восточном, юго-западном и северо-западном относительно координат точки А. При измерении точек, точки измерения последовательно именуются определенным образом. В некоторых случаях, угол α наклона составляет 5°.
Наклон на угол α непрерывно выполняют N раз. После выполнения каждого наклона на угол α, точки измерения компенсации наклона измеряют в восьми направлениях, то есть, восточном, западном, южном, северном, юго-восточном, северо-восточном, юго-западном и северо-западном относительно координат точки А, и координаты записываются в виде Xn, Yn, Hn. Например, для первого измерения конец центрирующего стержня размещают в точке A, после выполнения наклона на угол 5°, компенсацию наклона точек измеряют в восьми направлениях, то есть, восточном, западном, южном, северном, юго-восточном, северо-восточном, юго-западном и северо-западном относительно координат точки А. Затем снова выполняют наклон на угол 5° (то есть, выполняют наклон на угол 10° от исходного места), затем компенсацию наклона измеряют в восьми направлениях, то есть, восточном, западном, южном, северном, юго-восточном, северо-восточном, юго-западном и северо-западном относительно координат точки А.
В альтернативном варианте осуществления точки измерения компенсации наклона именуются следующим образом.
В дальнейшем были последовательно измерены данные наклона углов наклона 15°, 20°, 25°, 30°. Координаты каждой точки записываются в виде Xn, Yn, Hn.
Расхождения измерения компенсации наклона вычисляются для получения горизонтального расхождения ΔS и вертикального расхождения ΔH. В некоторых случаях, формула для расчета расхождения измерения компенсации наклона точки E-5-1 выглядит следующим образом:
горизонтальное расхождение
вертикальное расхождение ΔH=H0-Hn.
Когда выполнено измерение компенсации наклона в положении точки A, и после того, как измерительное программное обеспечение RTK получает координаты текущего положения, горизонтальное расхождение ΔS и вертикальное расхождение ΔH, которые изменяются в реальном времени, отображаются на интерфейсе измерительного программного обеспечения RTK. RTK собирает точки компенсации, и в то же время устройство вывода одновременно вычисляет и записывает ΔS и ΔH.
Когда отчет об измерении экспортирован, измерительное программное обеспечение RTK одновременно экспортирует горизонтальное расхождение ΔS и вертикальное расхождение ΔH в раздел измерения компенсации наклона в отчете об измерении, в то же время одновременно вычисляется максимальное горизонтальное расхождение ΔSmax и минимальное горизонтальное расхождение ΔSmin RTK при измерении компенсации наклона. Следует отметить, что значительное накопленное расхождение максимальной вертикального расхождения ΔHmax и минимального вертикального расхождения ΔHmin, вызванное плавающей точкой или изменением точности, должно быть устранено.
Вычисляется среднее значение горизонтального расхождения ΣΔS и среднее значение вертикального расхождения ΣΔH. Среднее значение горизонтального расхождения ΣΔS и среднее значение вертикального расхождения ΣΔH, которые указывают на точность измерения компенсации наклона этого комплекта RTK, также не должны превышать 5 см.
Данные экспортируются и выполняется дисперсионный анализ для вывода статистической диаграммы расхождений, показанной на ФИГ. 1 и ФИГ. 2. ФИГ. 1 представляет собой статистическую диаграмму горизонтальных расхождений, а ФИГ. 2 представляет собой статистическую диаграмму вертикальных расхождений. Путем создания диаграммы распределения расхождений, предоставляется полезный способ для более эффективного использования способа измерения компенсации наклона при RTK.
В заключение, настоящее изобретение предоставляет практический и выполнимый способ проверки точности измерения компенсации наклона оборудования RTK. Путем сбора центральных координат в начале и последующего сбора точек измерения компенсации, и вычисления в реальном времени, записи и отображения смещения и разности точек измерения по высоте. Максимальные и минимальные расхождения точек измерения компенсации вблизи местоположения точки автоматически подсчитываются, и выполняется проверка, соответствует ли точность измерения компенсации наклона оборудования RTK расчетному требованию точности. Поэтому требования к операторам сведены к минимуму. Способ согласно настоящему изобретению можно использовать для определения точности измерения компенсации наклона оборудования RTK. Также, способ согласно настоящему изобретению может быть реализован в измерительном программном обеспечении, чтобы определять, могут ли данные пользователя об измерении компенсации наклона использоваться в режиме реального времени, поэтому он обеспечивает полезный способ для лучшего использования способа измерения компенсации наклона при RTK.
Предпочтительный вариант осуществления настоящего изобретения был описан выше. Следует понимать, что настоящее изобретение не ограничено конкретными вариантами осуществления, описанными выше. Устройства и структуры, которые не описаны подробно в данном документе, следует понимать, как реализуемые обычным способом, известным в данной области техники. Различные возможные изменения и модификации или эквивалентные варианты осуществления, полученные с помощью эквивалентных замен, могут быть получены любым специалистом в данной области техники из технического решения настоящего изобретения в соответствии со способом и техническими характеристиками, изложенными выше, без отклонения от технического решения настоящего изобретения, что не оказывает никакого влияния на сущность настоящего изобретения. Следовательно, любая простая модификация, эквивалентная замена и модификация, выполненная на основе вышеупомянутого варианта осуществления в соответствии с технической сущностью настоящего изобретения без отступления от содержания технического решения настоящего изобретения, все же должны рассматриваться как входящие в объем технического решения настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ УКАЗАНИЯ НАПРАВЛЕНИЯ | 2015 |
|
RU2697906C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАКЛОНА ИЗМЕРИТЕЛЬНОГО ПРИЕМНИКА RTK | 2017 |
|
RU2716360C1 |
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 2001 |
|
RU2187074C1 |
| МЕТОД И МЕХАНИЗМ ЭКСТРАКЦИИ И РАСПОЗНАВАНИЯ МНОГОУГОЛЬНИКОВ ПРИ ПРОЕКТИРОВАНИИ ИНТЕГРАЛЬНЫХ СХЕМ | 2006 |
|
RU2406136C2 |
| Жироскопический компас с жидкостным стабилизатором | 1930 |
|
SU33052A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА В СИСТЕМАХ НАВИГАЦИИ, ТОПОПРИВЯЗКИ, НАВЕДЕНИЯ И ПРИЦЕЛИВАНИЯ (ВАРИАНТЫ) | 2001 |
|
RU2184936C1 |
| СПОСОБ ЭКСПЛУАТАЦИОННОЙ КАЛИБРОВКИ ТРЕХОСЕВОГО ЭЛЕКТРОННОГО КОМПАСА С КОМПЕНСАЦИЕЙ СМЕЩЕНИЯ ОСЕЙ | 2020 |
|
RU2755400C1 |
| КОМПЕНСАЦИЯ СКЛОНЕНИЯ ПРИ СЕЙСМИЧЕСКИХ РАЗВЕДКАХ | 2012 |
|
RU2557361C2 |
| ЭЛЕКТРОННЫЕ ЧАСЫ ДЛЯ ИССЛЕДОВАНИЙ КОСМОСА И/ИЛИ ПОВЕРХНОСТИ | 2020 |
|
RU2820982C1 |
Предложенное изобретение относится к средствам проверки точности измерения компенсации наклона при RTK (кинематики в реальном времени). Способ проверки точности измерения компенсации наклона при RTK заключается в том, что обеспечивают оборудование RTK с электронным пузырьком и модулем компенсации электронного компаса и выполняют калибровку электронного пузырька и модуля компенсации электронного компаса; устанавливают контрольную точку, размещают конец центрирующего стержня в точке А под углом α наклона и измеряют точки для компенсации наклона в восьми направлениях; непрерывно выполняют наклон на угол α и после каждого наклона измеряют точки для компенсации наклона в восьми направлениях относительно координат точки А, и записывают координаты в виде (Xn, Yn, Hn); вычисляют расхождения измерения компенсации наклона при RTK для получения горизонтального расхождения ΔS и вертикального расхождения ΔН; при этом после получения координат текущей позиции, отображают горизонтальное расхождение ΔS и вертикальное расхождение ΔН, которые изменяются в реальном времени, на интерфейсе измерительного программного обеспечения RTK; рассчитывают и записывают ΔS и ΔН устройством вывода; экспортируют горизонтальное расхождение ΔS и вертикальное расхождение ΔН в раздел измерения компенсации наклона в отчете об измерении, рассчитывают максимальное горизонтальное расхождение ΔSmax и минимальное горизонтальное расхождение ΔSmin оборудования RTK при измерении компенсации наклона при RTK; рассчитывают среднее горизонтальное расхождение ΣΔS и среднее вертикальное расхождение ΣΔH и экспортируют данные и выполняют дисперсионный анализ для вывода статистической диаграммы расхождений. Данное изобретение позволяет снизить требования к оператору RTK оборудования. 4 з.п. ф-лы, 2 ил.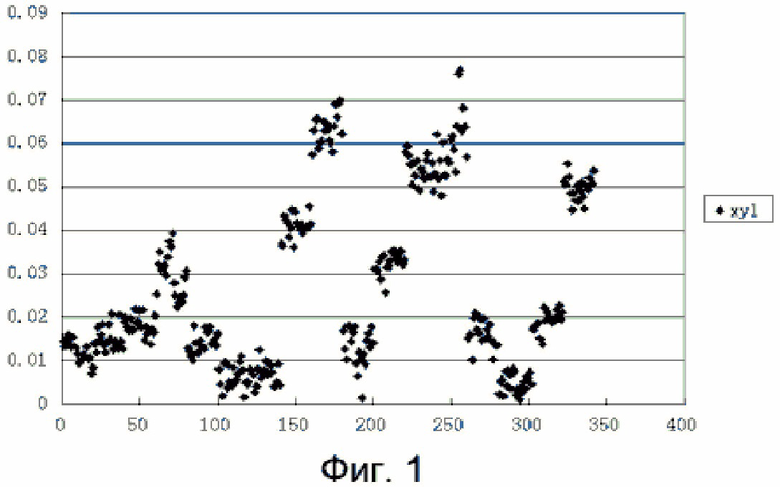
1. Способ проверки точности измерения компенсации наклона при RTK, содержащий следующие этапы, согласно которым:
обеспечивают оборудование RTK с электронным пузырьком и модулем компенсации электронного компаса и выполняют калибровку электронного пузырька и модуля компенсации электронного компаса для обеспечения нормального и надежного отображения электронных пузырьков центрирующего стержня оборудования RTK;
устанавливают контрольную точку А и получают координаты (X0, Y0, H0) точки А;
с центром в точке А, размещают конец центрирующего стержня в точке А под углом α наклона и измеряют N точек измерения компенсации наклона в каждом из восьми направлений, причем данные восемь направлений представляют собой восточное, западное, южное, северное, юго-восточное, северо-восточное, юго-западное и северо-западное направление относительно координат точки А;
непрерывно выполняют наклон на угол α N раз и после каждого наклона на угол α измеряют точки измерения компенсации наклона в восьми направлениях: восточном, западном, южном, северном, юго-восточном, северо-восточном, юго-западном и северо-западном относительно координат точки А, и записывают координаты в виде (Xn, Yn, Hn);
вычисляют расхождения измерения компенсации наклона при RTK для получения горизонтального расхождения ΔS и вертикального расхождения ΔН;
при этом, когда измерение компенсации наклона при RTK выполняют в местоположении точки А, то после получения измерительным программным обеспечением RTK координат текущей позиции отображают горизонтальное расхождение ΔS и вертикальное расхождение ΔН, которые изменяются в реальном времени, на интерфейсе измерительного программного обеспечения RTK; RTK собирает точки компенсации, и в то же время одновременно рассчитывают и записывают ΔS и ΔН устройством вывода; когда экспортируют отчет об измерении, то измерительное программное обеспечение RTK одновременно экспортирует горизонтальное расхождение ΔS и вертикальное расхождение ΔН в раздел измерения компенсации наклона в отчете об измерении, в то же время одновременно рассчитывают максимальное горизонтальное расхождение ΔSmax и минимальное горизонтальное расхождение ΔSmin оборудования RTK при измерении компенсации наклона при RTK;
рассчитывают среднее горизонтальное расхождение ΣΔS и среднее вертикальное расхождение ΣΔH и
экспортируют данные и выполняют дисперсионный анализ для вывода статистической диаграммы расхождений.
2. Способ проверки точности измерения компенсации наклона при RTK по п. 1, согласно которому контрольную точку А устанавливают в открытом и доступном положении вне помещения.
3. Способ проверки точности измерения компенсации наклона при RTK по п. 2, согласно которому координаты (X0, Y0, H0) точки А получают путем вычисления среднего значения множества измерений.
4. Способ проверки точности измерения компенсации наклона при RTK по п. 1, согласно которому угол α составляет 5°.
5. Способ проверки точности измерения компенсации наклона при RTK по п. 1, согласно которому формулы для расчета расхождений измерения компенсации наклона содержат:
горизонтальное расхождение 
вертикальное расхождение ΔН=H0-Hn.
| CN 105424013 A, 23.03.2016 | |||
| CN 105445774 A, 30.03.2016 | |||
| US 6862526 B2, 01.03.2005 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

