Область техники
Настоящее изобретение относится к области техники измерения методом кинематики в реальном времени (RTK), в частности к способу измерения наклона измерительного приемника RTK.
Уровень техники
При измерениях RTK центрирующий стержень ровера должен быть расположен вертикально, и затем координаты положения точки на земле, подлежащей измерению, рассчитываются в соответствии с положением фазового центра антенны приемника Глобальной Навигационной Спутниковой Системы (ГНСС) и расстоянием от фазового центра до земли.
Однако при практическом выполнении операции измерения из-за влияния топографических условий и ограничений самого инструмента, центрирующий стержень ровера не может быть размещен вертикально во многих точках измерения, и обычно требуется наклон, что является причиной усложнения процесса измерения и значительных расхождений измерения.
Раскрытие сущности изобретения
Для устранения вышеупомянутых недостатков настоящее изобретение предлагает способ измерения наклона измерительного приемника RTK, который вычисляет положение точки, подлежащей измерению, в соответствии с положением и углом наклона фазового центра антенны приемника, длиной центрирующего стержня и прочим, во время множества измерений наклона. Для RTK сантиметровой точности вычисление положения с точностью до сантиметра может быть достигнуто, если имеется достаточное количество значений наблюдения.
Настоящее изобретение предусматривает способ измерения наклона измерительного приемника RTK, который включает следующие этапы:
Этап S1: фиксацию нижней части центрирующего стержня и выполнение измерения после выполнения наклона и встряхивания;
Этап S2: получение последовательности точек измерения, последовательности наклонов в точках измерения, длины измерительного стержня и высоты фазового центра антенны на основе указанного измерения;
Этап S3: получение порогового уровня качества позиционирования и геодезических координат точки, подлежащей измерению, на основе значений, полученных в результате измерения;
Этап S4: определение того, удовлетворяет ли пороговый уровень качества позиционирования требованию для принятия решения о завершении или продолжении измерения.
В вышеупомянутом способе этап фиксации нижней части центрирующего стержня и выполнения измерения после выполнения наклона и встряхивания включает:
сохранение неизменной длины центрирующего стержня при его использовании во время измерения, и сохранение нижней части центрирующего стержня в зафиксированном состоянии.
Согласно вышеупомянутому способу этап получения последовательности точек измерения, последовательности наклонов в точках измерения, длины измерительного стержня и высоты фазового центра антенны на основе указанного измерения включает:
наблюдение и получение геодезических координат (Bi, Li, Hi) точки наблюдения и угла θi наклона при измерении
преобразование геодезических координат (Bi, Li, Hi) точки наблюдения в плоские координаты (Ni, Ei, Hi);
получение плоских координат (




Согласно вышеупомянутому способу этап получения порогового уровня качества позиционирования и геодезических координат точки, подлежащей измерению, на основе значений, полученных в результате измерения, включает:
составление уравнения первого типа по результатам наблюдения в соответствии с принципом засечки на основе координат положения точки наблюдения и расстояния между точкой наблюдения и точкой, подлежащей измерению;
составление уравнения второго типа по результатам наблюдения в соответствии с косинусом угла наклона между разностью высот и расстоянием между точкой наблюдения и точкой, подлежащей измерению.
Согласно вышеупомянутому способу этап определения того, удовлетворяет ли пороговый уровень качества позиционирования требованию принятия решения о том, завершать или не завершать измерение, включает:
Определение того, удовлетворяет ли пороговый уровень качества позиционирования требованию, и если требование не удовлетворено, выполняют этапы S1 - S3; если требование удовлетворено, завершение измерения.
Согласно вышеупомянутому способу, в котором этап получения плоских координат (
составление уравнения по результатам наблюдения и выполнение косвенной корректировки;
выполнение грубой оценки в соответствии с остаточными значениями наблюдения после косвенной корректировки и вычисление плоских координат (


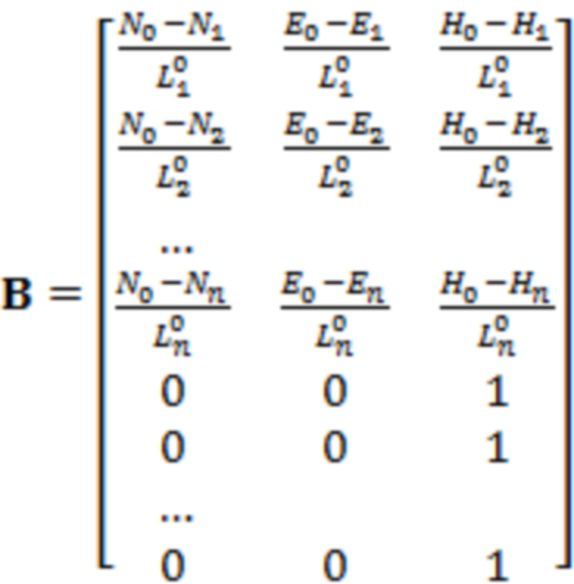
Согласно вышеупомянутому способу, на этапе составления уравнения первого типа по результатам наблюдения в соответствии с принципом засечки на основе координат положения точки наблюдения и расстояния между точкой наблюдения и точкой, подлежащей измерению, при условии, что плоские координаты фазового центра антенны GPS-приемника равны (Ni, Ei) и геодезическая высота равна Hi (где i - 1, 2.., n, n - общее количество точек наблюдения, то же самое ниже), и при условии, что плоские координаты и геодезическая высота точки O, подлежащей измерению, равны ( , соответственно, и расстояние от точки, подлежащей измерению, до точки наблюдения равно
, соответственно, и расстояние от точки, подлежащей измерению, до точки наблюдения равно  , уравнение результатов наблюдения выражается следующим уравнением:
, уравнение результатов наблюдения выражается следующим уравнением:
 (1)
(1)
после линеаризации получают следующее уравнение:
 (2)
(2)
где
 - число корректировки длины, (
- число корректировки длины, ( ) - число корректировки координаты точки, подлежащей измерению,
) - число корректировки координаты точки, подлежащей измерению,
(N0, E0, H0) - приблизительные координаты точки, подлежащей измерению,
L i - сумма длины центрирующего стержня и высоты антенны,
 - расстояние, вычисленное по координатам точки наблюдения и приблизительным координатам точки, подлежащей измерению.
- расстояние, вычисленное по координатам точки наблюдения и приблизительным координатам точки, подлежащей измерению.
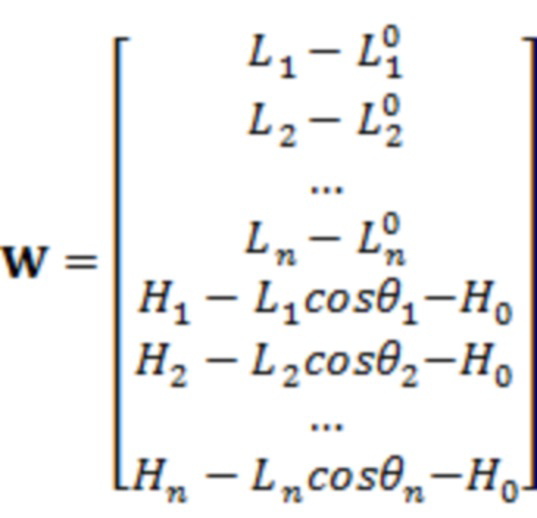
Согласно вышеупомянутому способу на этапе составления уравнения второго типа по результатам наблюдения в соответствии с косинусом угла наклона между разностью высот и расстоянием между точкой наблюдения и точкой, подлежащей измерению, при условии, что при наблюдении угол наклона в точке наблюдения равен  , уравнение результатов наблюдения выражается следующим уравнением:
, уравнение результатов наблюдения выражается следующим уравнением:
 (3)
(3)
где  , так что обеспечено получение следующего уравнения после обработки на основе уравнений:
, так что обеспечено получение следующего уравнения после обработки на основе уравнений:
 (4),
(4),
объединение уравнений (2) и (4) для составления набора уравнений расхождений:
 (5)
(5)
где  ;
; 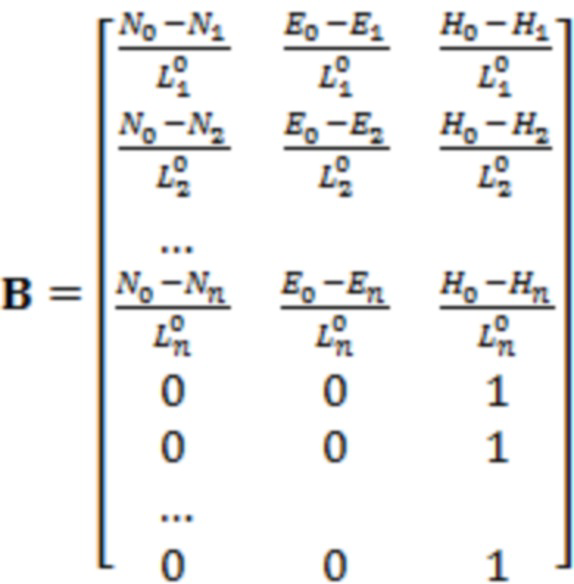 ;
; 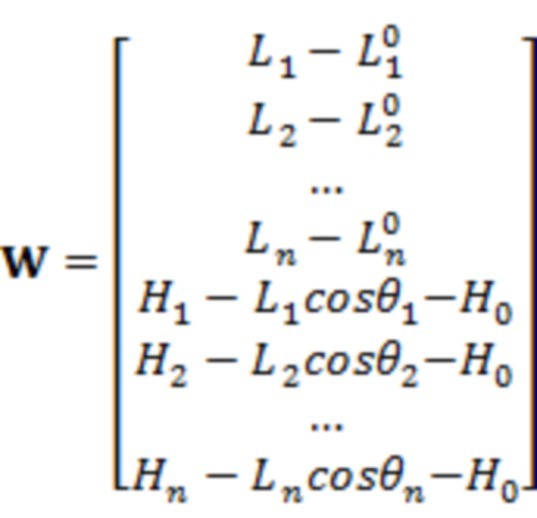 ;
;
P - весовая матрица, заданная в соответствии с точностью значений наблюдения, причем если информация о точности значений наблюдения отсутствует, P может быть задана как единичная матрица.
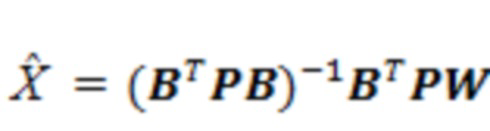
Вышеупомянутый способ включает следующие этапы: получение следующего уравнения в соответствии с критерием взвешенных наименьших квадратов:
 (6)
(6)
наконец, вычисление плоскостного положения (
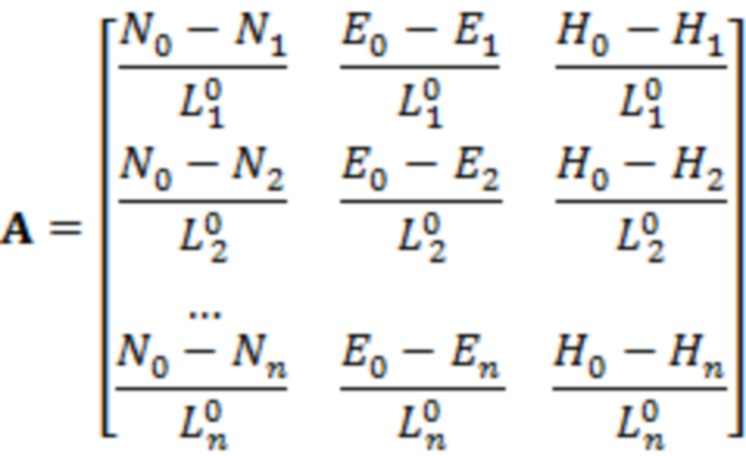
и при условии, что 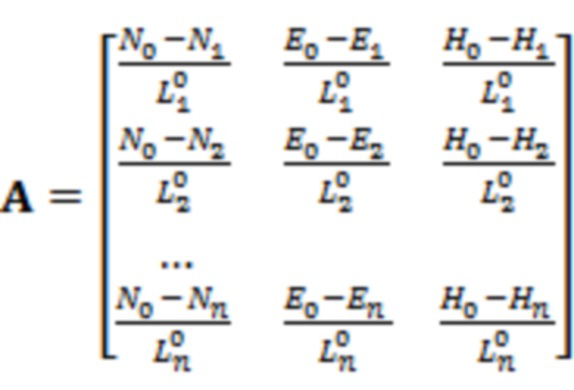
где A - матрица коэффициентов;
вычисление ATA для получения единичной матрицы размером 3 строки и 3 столбца и суммирование диагональных элементов единичной матрицы, а затем вычисление квадратного корня из суммированного значения с получением порогового уровня качества.
Настоящее изобретение имеет следующие преимущества. Положение точки, подлежащей измерению, рассчитывается в соответствии с положением и углом наклона фазового центра антенны приемника, а также длиной центрирующего стержня и т.д., во время множества измерений наклона. Для RTK сантиметровой точности вычисление положения с точностью до сантиметра может быть достигнуто, если имеется достаточное количество значений наблюдения.
Краткое описание чертежей
Настоящее изобретение, его характеристики, внешний вид и преимущества станут более понятными после прочтения подробного описания неограничивающих вариантов осуществления со ссылкой на прилагаемые ниже чертежи. На всех чертежах идентичные ссылочные позиции относятся к одной и той же части. Чертежи выполнены не в соответствии с конкретными пропорциями и основной акцент сделан на иллюстрации сущности настоящего изобретения.
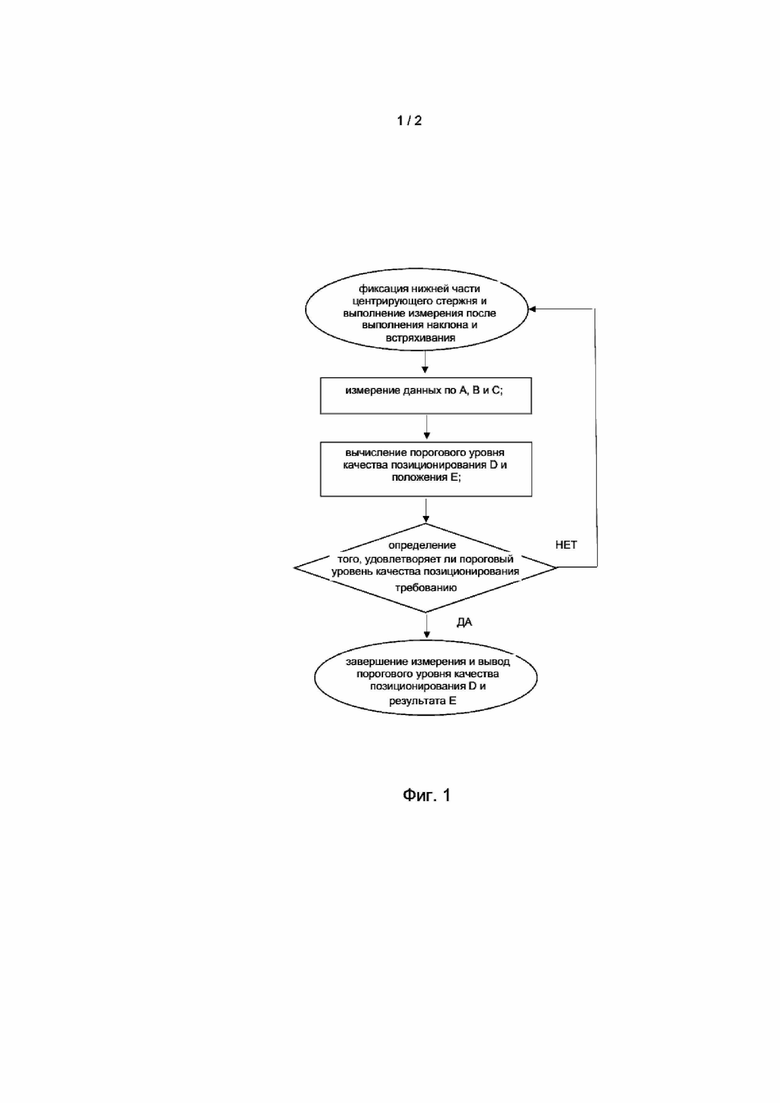
На фиг. 1 представлена блок-схема последовательности операций, показывающая процесс способа измерения наклона измерительного приемника RTK по настоящему изобретению;
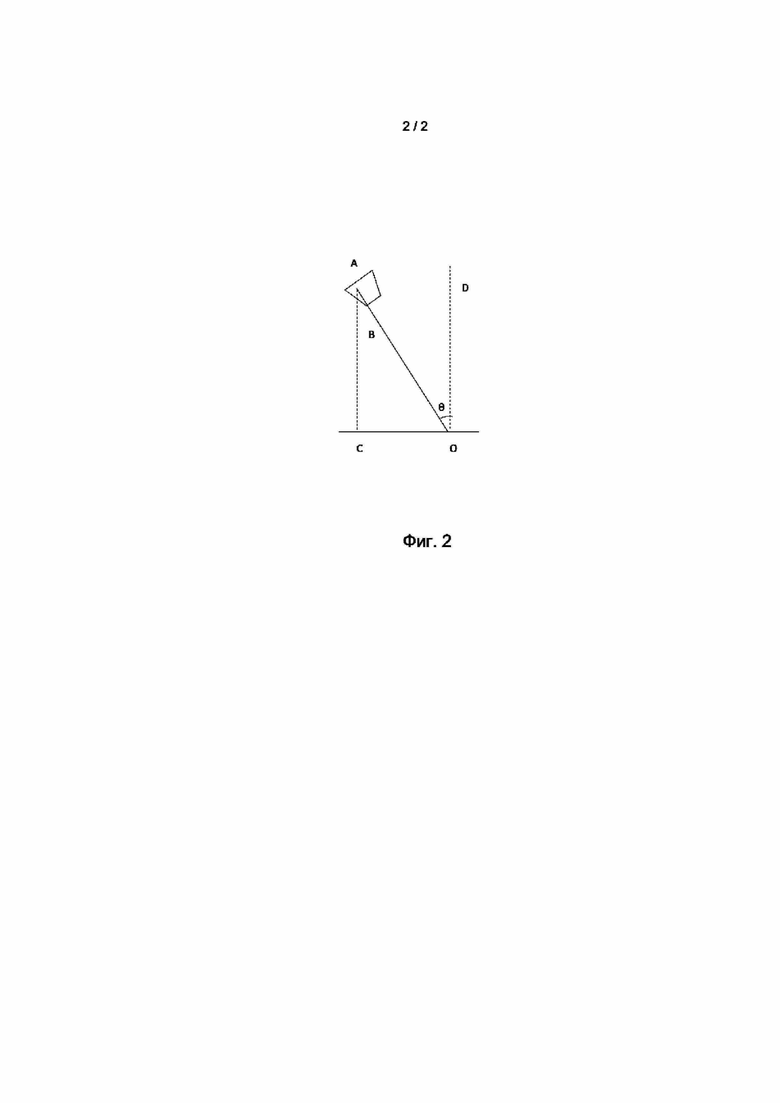
На фиг. 2 представлена принципиальная схема способа измерения наклона измерительного приемника RTK по настоящему изобретению.
Осуществление изобретения
В последующих описаниях приведены многочисленные конкретные детали для полного понимания настоящего изобретения. Однако для специалистов в данной области техники очевидно, что настоящее изобретение может быть реализовано без одной или нескольких из данных деталей. В других примерах, некоторые технические признаки, известные в данной области техники, не описаны, во избежание путаницы с настоящим изобретением.
Для полного понимания настоящего изобретения в последующих описаниях будут предоставлены подробные этапы и подробные конструкции, чтобы ясно проиллюстрировать техническое решение настоящего изобретения. Предпочтительный вариант осуществления настоящего изобретения подробно описан ниже. Однако, помимо этих подробных описаний, настоящее изобретение может иметь другие варианты реализации.
Со ссылкой на фиг. 1 и фиг. 2, настоящее изобретение предоставляет способ измерения наклона измерительного приемника RTK, включающий следующие этапы.
Этап S1: нижнюю часть центрирующего стержня фиксируют, и измерение выполняется после выполнения наклона и встряхивания. Во время измерения длина центрирующего стержня при использовании остается неизменной, а нижняя часть центрирующего стержня зафиксирована. То есть, стабильность приемника во время измерения не является ограниченной, и приемник можно произвольно подвергать встряхиванию, пока его нижняя часть зафиксирована.
Этап S2: получение последовательности точек измерения, последовательности наклонов в точках измерения, длины измерительного стержня и высоты фазового центра антенны на основе указанного измерения. В частности, со ссылкой на A, B и C показанные на фиг. 1, A - это последовательность точек измерения, которая включает в себя все точки наблюдения, записанные от начала измерения до конца измерения в хронологической последовательности. Каждая точка имеет свою собственную информацию о местоположении, и данная информация представляет собой геодезические координаты фактически измеренной точки (фазовым центром антенны). Геодезические координаты последовательно включают в себя геодезическую широту B, геодезическую долготу L и геодезическую высоту H. Единицей измерения B и L является радиан, а единицей измерения H - метры. B - это последовательность углов наклона в точках измерения, которая включает все углы наклона, записанные в хронологической последовательности от начала измерения до конца измерения. Углы наклона один к одному соответствуют точкам измерения, что указывает на то, что координаты точки измерения получают вместе с углом наклона и единицей измерения угла наклона является радиан. С - это длина измерительного стержня и высота фазового центра антенны, и его единицей измерения является метр. D - это пороговый уровень качества позиционирования, который также называют геометрическим фактором. Геометрический фактор - это натуральное число с минимальным значением 1. Чем меньше значение геометрического фактора, тем выше точность результата расчета. E - это геодезические координаты точки, подлежащей измерению, (точки земли), которые является результатом, рассчитанным программой, и E включает геодезическую широту B, геодезическую долготу L и геодезическую высоту H. Единицей измерения: B и L является радиан, а единицей измерения H является метр.
Этап 2, в частности, включает в себя этап S2a: наблюдение и получение геодезических координат (Bi, Li, Hi) точки наблюдения и угла θi наклона при измерении, и этап S2b: преобразование геодезических координат (Bi, Li, Hi) точки наблюдения в плоские координаты (Ni, Ei, Hi); и этап S2c: получение плоских координат (

Этап S3: получение порогового уровня качества позиционирования и геодезических координат точки, подлежащей измерению, на основе значений, полученных в результате измерения.
В частности, этап 3 включает в себя этап S3a: составление уравнения первого типа по результатам наблюдения в соответствии с принципом засечки на основе координат положения точки наблюдения и расстояния между точкой наблюдения и точкой, подлежащей измерению. В частности, при условии, что плоские координаты фазового центра антенны GPS-приемника равны (Ni, Ei); и геодезическая высота равна Hi (где i равно 1, 2.., n, n - общее количество точек наблюдения, то же самое ниже), и при условии, что плоские координаты и геодезическая высота точки O, подлежащей измерению, равны (, соответственно, и расстояние от точки, подлежащей измерению, до точки наблюдения равно , уравнение результатов наблюдения выражается следующим уравнением:
(7)
после линеаризации получают следующее уравнение:
(8)
где
- число корректировки длины,
() - число корректировки координат точки, подлежащей измерению,
(N0, E0, H0) - приблизительные координаты точки, подлежащей измерению,
Li - сумма длины центрирующего стержня и высоты антенны, и
- расстояние, вычисленное по координатам точки наблюдения и приблизительным координатам точки, подлежащей измерению.
Этап 3 дополнительно включает в себя этап S3b: составление уравнения второго типа по результатам наблюдения в соответствии с косинусом угла наклона между разностью высот и расстоянием между точкой наблюдения и точкой, подлежащей измерению.
В частности, этап 3b включает в себя предположение, что при наблюдении угол наклона в точке наблюдения равен , при этом уравнение результатов наблюдения выражается следующим уравнением:
(9)
где , так что следующее уравнение может быть получено после обработки на основе уравнений:
(10)
объединение уравнений (2) и (4) для составления набора уравнений расхождений:
(11)
где ; ; ;
P - весовая матрица, заданная в соответствии с точностью значений наблюдения, причем если информация о точности значений наблюдения недоступна, P может быть задана в виде единичной матрицы.
получение следующего уравнения в соответствии с критерием взвешенных наименьших квадратов:
(12)
окончательное вычисление плоскостного положения (
и при условии, что
где A - матрица коэффициентов; вычисление ATA для получения единичной матрицы размером 3 строки и 3 столбца и суммирование диагональных элементов единичной матрицы, а затем вычисление квадратного корня из суммированного значения с получением порогового уровня качества.
Этап S4: определение того, удовлетворяет ли пороговый уровень качества позиционирования требованию для принятия решения о завершении измерения. Если требование не удовлетворено, выполняются этапы S1 - S3. Если требование удовлетворено, завершение измерения.
Процесс работы согласно настоящему изобретению: со ссылкой на фиг. 1 и фиг. 2 этапы расчета являются следующими.
(1) Посредством наблюдения для всех точек наблюдения получают геодезические координаты (Bi, Li, Hi) и угол θi наклона при измерении.
(2) Геодезические координаты (Bi, Li, Hi) точки наблюдения преобразуются в плоские координаты (Ni, Ei, Hi).
(3) Составляется уравнение по результатам наблюдения и выполняется косвенная корректировка.
(4) Выполняется грубая оценка в соответствии с невязкой значений наблюдения после косвенной корректировки и рассчитываются плоские координаты (
(5) Плоские координаты (
(6) Выводятся преобразованные геодезические координаты и пороговый уровень качества (которые также называют «геометрическими факторами»).
(7) По значению пороговому уровню качества определяют, соответствует ли точность стандарту. Если точность соответствует стандарту, измерение завершается и выводятся преобразованные геодезические координаты. Если точность не соответствует стандарту, переходят к процессу (1) и выполняют измерение. Данные наблюдений, полученные за это время, добавляются во все точки наблюдения, описанные в процессе (1).
На этапе (6) пороговый уровень качества (который также называют «геометрическим фактором») представляет собой натуральное число с минимальным значением, равным 1. Чем меньше пороговый уровень качества, тем выше точность.
Во время измерения, длина центрирующего стержня при использовании является фиксированной и не может быть изменена, а нижняя часть центрирующего стержня не может быть смещена. Во время измерения приемник нужно встряхнуть, и чем сильнее встряхивание, тем лучше эффект.
Со ссылкой на фиг. 2, принцип расчета заключается в следующем. O – это точка на земле, подлежащая измерению. A - это фазовый центр антенны GPS-приемника, который является точкой наблюдения при измерении наклона. AB - это высота антенны. OB - это длина центрирующего стержня. OD - это перпендикуляр из точки, подлежащей измерению, к референц-эллипсоиду. AC – это перпендикуляр из точки A наблюдения к референц-эллипсоиду. На проекции в системе плоских координат AC параллельна OD. θ - это угол наклона аппарата.
Измерение наклона в основном включает в себя два типа значений наблюдения, то есть положение и угол наклона, которые соответствуют двум типам уравнений наблюдения, соответственно.
Первый тип уравнения по результатам наблюдения составляется в соответствии с принципом засечки на основе координат положения точки наблюдения и расстоянием между точкой наблюдения и точкой, подлежащей измерению. При условии, что плоские координаты фазового центра антенны GPS-приемника равны (Ni, Ei) и геодезическая высота равна Hi (где i равно 1, 2, n, n - общее количество точек наблюдения, то же самое ниже), и при условии, что плоские координаты и геодезическая высота точки O, подлежащей измерению, равны ( соответственно, и расстояние от точки, подлежащей измерению, до точки наблюдения равно , уравнение результатов наблюдения выражается следующим уравнением:
соответственно, и расстояние от точки, подлежащей измерению, до точки наблюдения равно , уравнение результатов наблюдения выражается следующим уравнением:
(13)
после линеаризации получают следующее уравнение:
 (14)
(14)
где
- число корректировки длины,
() - число корректировки координат точки, подлежащей измерению,
(N0, E0, H0) - приблизительные координаты точки, подлежащей измерению,
Li - сумма длины центрирующего стержня и высоты антенны, и
- расстояние, вычисленное из координат точки наблюдения и приблизительных координат точки, подлежащей измерению.
Второй тип уравнения по результатам наблюдения составляется в соответствии с косинусом угла наклона между разностью высот и расстоянием между точкой наблюдения и точкой, подлежащей измерению. При условии, что угол наклона при наблюдении в точке наблюдения равен , уравнение результатов наблюдения выглядит следующим образом:
(15)
где , так что обеспечено получение следующего уравнения после обработки на основе уравнений:
(16)
Уравнение (2) и (4) объединяют для составления набора уравнений расхождений:
(17)
где ; ; ;
P - весовая матрица, которую задают в соответствии с точностью значений наблюдения. Если информация о точности значений наблюдений недоступна, P может быть задана в виде единичной матрицы.
В соответствии с критерием взвешенных наименьших квадратов может быть получено следующее уравнение:
(18)
Наконец, плоскостное положение (
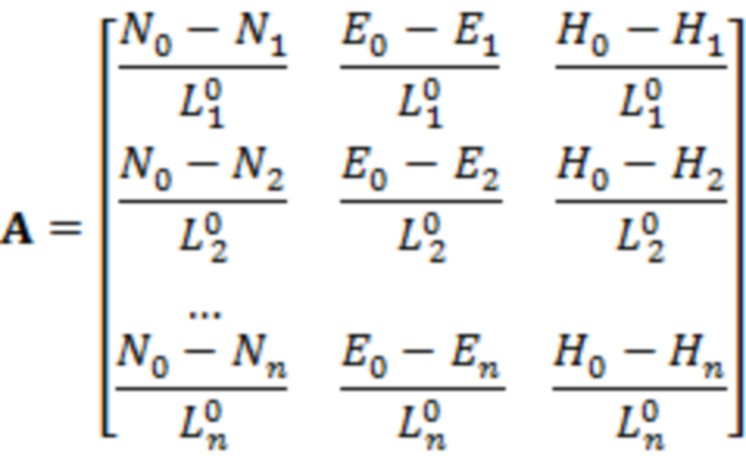
При условии, что
где A - матрица коэффициентов. ATA рассчитывается для получения единичной матрицы размером 3 строки и 3 столбца. Диагональные элементы единичной матрицы суммируются и выполняется вычисление квадратного корня из суммированного значения с получением порогового уровня качества, который называется геометрическим фактором. Геометрический фактор используетcя в качестве показателя точности. Чем меньше геометрический фактор, тем выше точность.
Способ согласно настоящему изобретению может реализовывать следующие аспекты.
1. Требуется только измерительный приемник RTK с информацией об угле наклона, поэтому стоимость дополнительного оборудования исключается.
3. По сравнению с традиционным модулем измерения наклона, который выполняет измерения на основе информации об угле наклона приемника, способ согласно настоящему изобретению не подвержен влиянию каких-либо факторов внешней среды (таких как магнитные помехи, изменение температуры и т. д.).
4. По сравнению с традиционным способом измерения наклона калибровка магнитного поля не требуется.
5. По сравнению с традиционным способом измерения наклона, точность измерения положения нижней части центрирующего стержня зависит от устойчивости геометрической конструкции точки наблюдения, количества и точности точек наблюдения, точности измерения угла наклона, расхождения по длине центрирующего стержня и расхождения по расстоянию до фазового центра антенны. Результаты измерений являются более надежными, а точность измерений более высокой.
6. По сравнению с традиционным способом измерения наклона, стабильность приемника во время измерения не ограничена, и приемник может произвольно колебаться, пока нижняя часть зафиксирована.
7. По сравнению с традиционным способом измерения наклона, может быть задано пороговое значение точности измерения. Когда точность соответствует стандарту, увеличение порогового значения геометрического фактора может сократить время измерения.
Предпочтительный вариант осуществления настоящего изобретения был описан выше. Следует понимать, что настоящее изобретение не ограничено конкретными вариантами осуществления, описанными выше. Устройства и конструкции, которые не описаны подробно в данном документе, следует понимать как реализуемые обычным способом, известным в данной области техники. Различные возможные изменения и модификации или эквивалентные варианты осуществления, полученные с помощью эквивалентных замен, могут быть получены любым специалистом в данной области техники из технического решения настоящего изобретения в соответствии со способом и техническими характеристиками, изложенными выше, без отклонения от технического решения настоящего изобретения, что не оказывает никакого влияния на сущность настоящего изобретения. Следовательно, любая простая модификация, эквивалентная замена и модификация, выполненная на основе вышеупомянутого варианта осуществления в соответствии с технической сущностью настоящего изобретения без отступления от содержания технического решения настоящего изобретения, все же должны рассматриваться входящие в объем технического решения настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ ИЗМЕРЕНИЯ КОМПЕНСАЦИИ НАКЛОНА ПРИ RTK | 2017 |
|
RU2705514C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ ПРОВЕДЕНИЯ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ И СИСТЕМА ДЛЯ ВЫСОТНЫХ СООРУЖЕНИЙ | 2007 |
|
RU2381448C1 |
| СИСТЕМА СПУТНИКОВОГО МОНИТОРИНГА СМЕЩЕНИЙ ИНЖЕНЕРНЫХ СООРУЖЕНИЙ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ ГЛОНАСС/GPS | 2011 |
|
RU2467298C1 |
| СПОСОБ ИЗМЕРЕНИЯ ШИРИНЫ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2023 |
|
RU2807022C1 |
| Способ коррекции углов визирования на точку | 2020 |
|
RU2758860C1 |
| СПОСОБ УСТАНОВКИ ИЗМЕРИТЕЛЬНОГО ПРИБОРА В РАБОЧЕЕ ПОЛОЖЕНИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2428656C1 |
| Способ создания высокоточного, защищенного координатного поля в целях обеспечения условий для эффективного выполнения задач как при отсутствии и так при наличии сигналов ГНСС. | 2024 |
|
RU2839049C1 |
| НАВИГАЦИЯ GPS С ИСПОЛЬЗОВАНИЕМ ПОСЛЕДОВАТЕЛЬНЫХ РАЗНОСТЕЙ ИЗМЕРЕНИЙ ФАЗЫ НЕСУЩЕЙ | 2005 |
|
RU2389037C2 |
| Способ определения деформаций свайных опор трубопровода с использованием навигационных спутниковых систем | 2023 |
|
RU2821670C1 |
Предложенное изобретение относится к области техники измерения методом кинематики в реальном времени (RTK), в частности к способу измерения наклона измерительного приемника RTK. Способ измерения наклона измерительного приемника RTK включает следующие этапы: этап S1: фиксацию нижней части центрирующего стержня и выполнение измерения после выполнения наклона и встряхивания; этап S2: получение последовательности точек измерения, последовательности наклонов в точках измерения, длины измерительного стержня и высоты фазового центра антенны на основе указанного измерения; этап S3: получение порогового уровня качества позиционирования и геодезических координат точки, подлежащей измерению, на основе значений, полученных в результате измерения, при этом указанный этап включает в себя составление уравнения первого типа по результатам наблюдения в соответствии с принципом засечки на основе координат положения точки наблюдения и расстояния между точкой наблюдения и точкой, подлежащей измерению; а также составление уравнения второго типа по результатам наблюдения в соответствии с косинусом угла наклона между разностью высот и расстоянием между точкой наблюдения и точкой, подлежащей измерению; этап S4: определение того, удовлетворяет ли пороговый уровень качества позиционирования требованию для принятия решения о завершении или продолжении измерения. Благодаря использованию данного способа становится возможным провести точные измерения без обязательного размещения центрирующего стержня ровера в вертикальном положении во многих точках измерения. 7 з.п. ф-лы, 2 ил.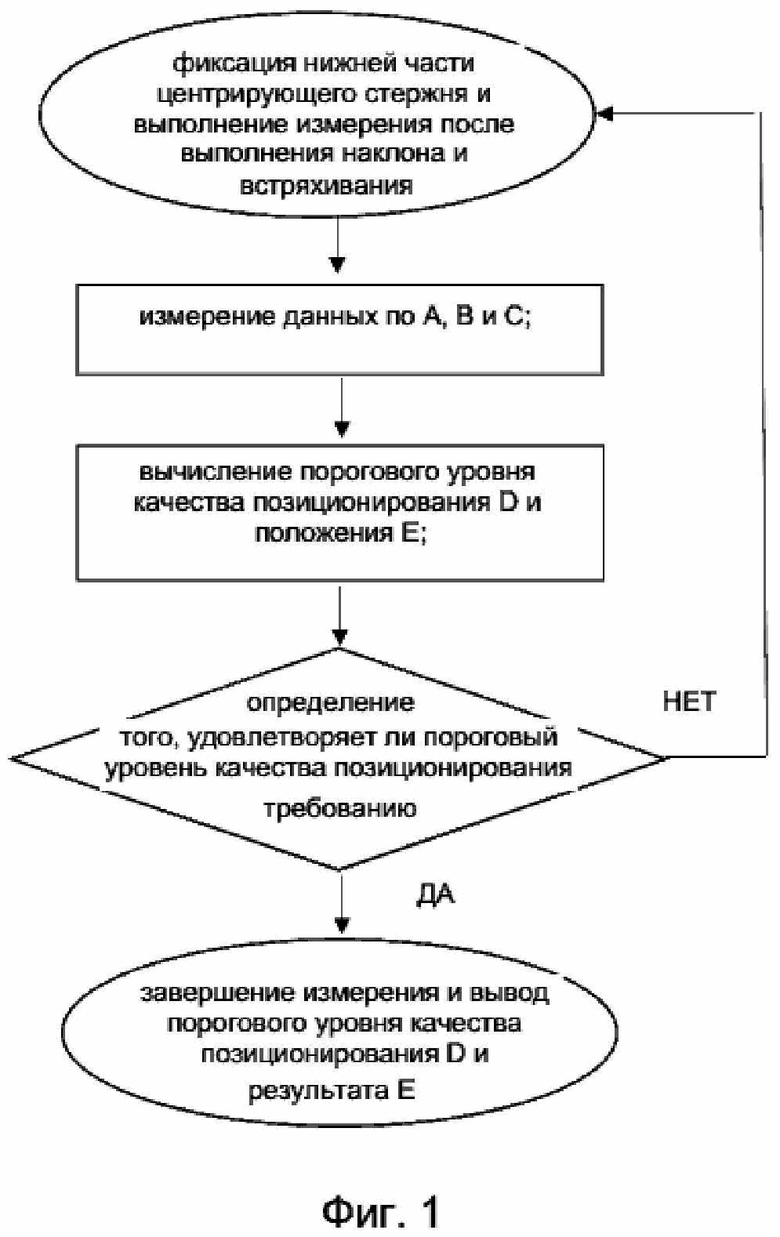
1. Способ измерения наклона измерительного приемника RTK, который включает следующие этапы:
этап S1: фиксацию нижней части центрирующего стержня и выполнение измерения после наклона и встряхивания;
этап S2: получение последовательности точек измерения, последовательности наклонов в точках измерения, длины измерительного стержня и высоты фазового центра антенны на основе указанного измерения;
этап S3: получение порогового уровня качества позиционирования и геодезических координат точки, подлежащей измерению, на основе значений, полученных в результате измерения;
этап S4: определение того, удовлетворяет ли пороговый уровень качества позиционирования требованию для принятия решения о завершении или продолжении измерения,
отличающийся тем, что этап получения порогового уровня качества позиционирования и геодезических координат подлежащей измерению точки на основе значений, полученных в результате измерения, включает:
составление уравнения первого типа по результатам наблюдения в соответствии с принципом засечки на основе координат положения точки наблюдения и расстояния между точкой наблюдения и точкой, подлежащей измерению;
составление уравнения второго типа по результатам наблюдения в соответствии с косинусом угла наклона между разностью высот и расстоянием между точкой наблюдения и точкой, подлежащей измерению.
2. Способ измерения наклона измерительного приемника RTK по п. 1, отличающийся тем, что этап фиксации нижней части центрирующего стержня и выполнения измерения после выполнения наклона и встряхивания включает:
во время измерения сохранение неизменной длины центрирующего стержня при его использовании и сохранение нижней части центрирующего стержня в зафиксированном состоянии.
3. Способ измерения наклона измерительного приемника RTK по п. 1, отличающийся тем, что этап получения последовательности точек измерения, последовательности наклонов в точках измерения, длины измерительного стержня и высоты фазового центра антенны на основе измерения последовательности включает:
наблюдение и получение геодезических координат (Bi, Li, Hi) точки наблюдения и угла θi наклона при измерении;
преобразование геодезических координат (Bi, Li, Hi) точки наблюдения в плоские координаты (Ni, Ei, Hi);
получение плоских координат (




4. Способ измерения наклона измерительного приемника RTK по п. 1, отличающийся тем, что этап определения того, удовлетворяет ли пороговый уровень качества позиционирования требованию для принятия решения о завершении или продолжении измерения, включает:
определение того, удовлетворяет ли пороговый уровень качества позиционирования требованию, и, если требование не удовлетворено, выполнение этапов S1 - S3; а, если требование удовлетворено, завершение измерения.
5. Способ измерения наклона измерительного приемника RTK по п. 3, отличающийся тем, что этап получения плоских координат (
составление уравнения по результатам наблюдения и выполнение косвенной корректировки;
выполнение грубой оценки в соответствии с невязкой значений наблюдения после косвенной корректировки и вычисление плоских координат (
6. Способ измерения наклона измерительного приемника RTK по п. 1, отличающийся тем, что на этапе составления уравнения первого типа по результатам наблюдения в соответствии с принципом засечки на основе указанных координат положения точки наблюдения и расстояния между точкой наблюдения и точкой, подлежащей измерению, при условии, что плоские координаты фазового центра антенны GPS-приемника равны (Ni, Ei) и геодезическая высота равна Hi (где i - 1, 2.., n, n - общее количество точек наблюдения, то же самое ниже), и при условии, что плоские координаты и геодезическая высота точки O, подлежащей измерению, равны ( соответственно, и расстояние от точки, подлежащей измерению, до точки наблюдения равно
соответственно, и расстояние от точки, подлежащей измерению, до точки наблюдения равно  , уравнение результатов наблюдения выражается следующим уравнением:
, уравнение результатов наблюдения выражается следующим уравнением:
 (1)
(1)
после линеаризации получают следующее уравнение:
 (2)
(2)
где
 - число корректировки длины;
- число корректировки длины;
( ) - число корректировки координат точки, подлежащей измерению,
) - число корректировки координат точки, подлежащей измерению,
(N0, E0, H0) - приблизительные координаты точки, подлежащей измерению,
Li - сумма длины центрирующего стержня и высот антенны;
 - расстояние, вычисленное по координатам точки наблюдения и приблизительным координатам точки, подлежащей измерению.
- расстояние, вычисленное по координатам точки наблюдения и приблизительным координатам точки, подлежащей измерению.
7. Способ измерения наклона измерительного приемника RTK по п. 1, отличающийся тем, что на этапе составления уравнения второго типа по результатам наблюдения в соответствии с косинусом угла наклона между разностью высот и расстоянием между точкой наблюдения и точкой, подлежащей измерению, при условии, что при наблюдении угол наклона в точке наблюдения равен  , уравнение результатов наблюдения выражено следующим уравнением:
, уравнение результатов наблюдения выражено следующим уравнением:
 (3)
(3)
где  , так что обеспечено получение следующего уравнения после обработки на основе указанного уравнения:
, так что обеспечено получение следующего уравнения после обработки на основе указанного уравнения:
 (4),
(4),
объединяют уравнение (2) и уравнение (4) для составления набора уравнений расхождений:
 (5)
(5)
где  ;
;  ;
;  ;
;
P - весовая матрица, заданная в соответствии с точностью значений наблюдения, причем, если информация о точности значений наблюдения отсутствует, P может быть задана как единичная матрица.
8. Способ измерения наклона измерительного приемника RTK по п. 7, отличающийся тем, что способ включает следующие этапы:
получение следующего уравнения по критерию взвешенного наименьшего квадрата:
 (6)
(6)
окончательное вычисление плоскостного положения (
и при условии, что
где A - матрица коэффициентов;
вычисление ATA для получения единичной матрицы размером 3 строки и 3 столбца и суммирование диагональных элементов единичной матрицы, а затем вычисление квадратного корня из суммированного значения с получением порогового уровня качества.
| CN 105424013 A, 23.03.2016 | |||
| CN 106291609 A, 04.01.2017 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| CN 103439727 A, 11.12.2013. | |||

