Способ относится к области навигационного приборостроения и может быть использован для определения и компенсации основных погрешностей двухрежимных одногироскопных курсоуказателей - гирокомпасов (ГК).
Известен способ коррекции ГК, заключающийся в запуске ГК, выдержке его в течение времени, необходимого для достижения устойчивого теплового и электрического состояния, сравнении курса ГК с истинным курсом стенда или полученным, например, методом пеленгования известного ориентира, формировании поправки, равной разности курсов, и добавлении ее к выходному курсу ГК [см. Коган В.М., Чичинадзе М.В. Судовой гироазимуткомпас "Вега". М.: Транспорт, 1983, с.87, 100].
Недостатком способа является возникновение дополнительных погрешностей при изменении широты места плавания.
Как известно, погрешность ГК ΔК в определении истинного курса зависит от основных ее источников: дрейфа вокруг восточной оси Р и невыставки Δ в соответствии с выражением:
где U - скорость Земли,
ϕ - широта места.
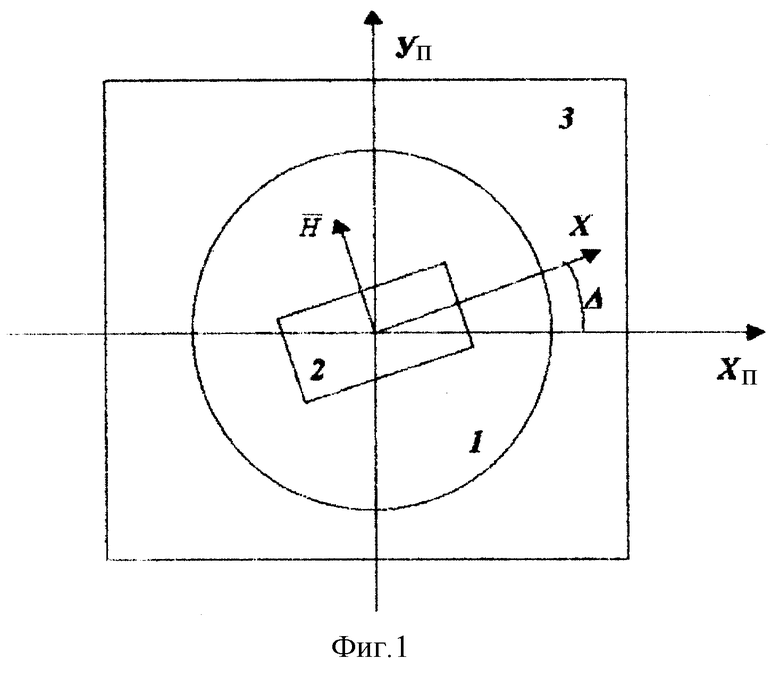
Невыставка Δ в соответствии с фиг.1 - это угол между поперечной осью корпуса ГК ХП и осью чувствительности гироскопа Х (ось Х перпендикулярна кинетическому моменту гироскопа  ) в заарретированном нулевом положении, когда сигнал с курсового датчика угла, измеряющего угол поворота между корпусом 3 и платформой 1, равен нулю. Заарретированное нулевое положение получают при регулировке, механически связывая платформу и корпус ГК и выставляя сигнал курсового датчика угла в ноль.
) в заарретированном нулевом положении, когда сигнал с курсового датчика угла, измеряющего угол поворота между корпусом 3 и платформой 1, равен нулю. Заарретированное нулевое положение получают при регулировке, механически связывая платформу и корпус ГК и выставляя сигнал курсового датчика угла в ноль.
При использовании способа-прототипа к курсу добавляется постоянная поправка  , определенная при регулировке и зависящая от широты места регулировки ϕст и поэтому обуславливающая дополнительную погрешность определения курса, которая имеет вид:
, определенная при регулировке и зависящая от широты места регулировки ϕст и поэтому обуславливающая дополнительную погрешность определения курса, которая имеет вид:
Величина (secϕ-secϕст) для объектов, плавающих в широтах ±70o, может достигать 1 и значение дополнительной погрешности при реальных для современных компасов дрейфах P=0,1÷0,2[o/ч] может достигать нескольких градусов.
В случае, когда поправка ΔКст пересчитывается к дрейфу по формуле Pст = ΔKст•Ucosϕcт = P+ΔUcosϕст и добавляется к сигналу управления скоростью гироскопа вокруг восточной оси, дополнительная погрешность гироскопа будет иметь вид
Величина  для указанных районов плавания может достигать значения 2 и значение дополнительной погрешности при реальных для современных компасов значениях невыставок Δ=0,5o÷1,5o может достигать нескольких градусов.
для указанных районов плавания может достигать значения 2 и значение дополнительной погрешности при реальных для современных компасов значениях невыставок Δ=0,5o÷1,5o может достигать нескольких градусов.
Первый из указанных способов используется при регулировке на предприятии-изготовителе, второй - на объектах при эксплуатации, при существенном изменении поправки за счет изменения дрейфа Р. Как показано выше, отсутствие компенсации на заводе-изготовителе практически не меняющейся величины невыставки Δ не позволяет повысить точность ГК ни в случае применения первого, ни в случае применения второго способа.
Целью изобретения является повышение точности ГК за счет определения и компенсации основных погрешностей гироскопа.
Поставленная цель достигается тем, что в способе коррекции ГК-прототипе, включающем запуск ГК и выдержку в течение времени, необходимого для достижения установившегося теплового и электрического состояния, сравнение курса ГК с истинным курсом стенда, формирование поправки равной разности курсов и смещение выходного курса ГК на величину поправки, дополнительно перед указанными операциями разворачивают платформу ГК вокруг вертикальной оси так, чтобы горизонтальная ось чувствительности ГК была направлена на север, затем включают режим гироазимута и измеряют ток в вертикальном датчике момента, пропорциональный угловой скорости управления гирокомпасом вокруг горизонтальной оси ΩГ1, затем вновь разворачивают платформу ГК вокруг вертикальной оси так, чтобы горизонтальная ось чувствительности ГК была направлена на юг, включают режим гироазимута и вновь измеряют ток в вертикальном датчике момента, пропорциональный скорости управления ΩГ2, вычисляют дрейф вокруг восточной оси по формуле
P=0,5(ΩГ1+ΩГ2).
Формируют компенсационную поправку по току по формуле:
Iр=-РН/Кдм,
где Кдм[г•см/а] - передаточный коэффициент датчика момента по току;
Н[г•см•с] - кинетический момент гироскопа;
и подают ток Iр на вертикальный датчик момента гироскопа.
Теоретическое обоснование способа заключается в следующем. После разворота платформы гирокомпаса на курс 90o и включения режима гироазимута в установившемся режиме скорость управления вокруг горизонтальной оси ΩГ, пропорциональная току в вертикальном датчике момента, будет определяться выражением ΩГ1 = Ucosϕ+P.
После разворота платформы гирокомпаса на курс 270o эта скорость будет определяться выражением ΩГ2 = -Ucosϕ+P. Эти выражения могут быть получены после измерения токов в вертикальном датчике момента гироскопа или пропорциональных ему скоростей управления ΩГ1 и ΩГ2. Тогда значения восточного дрейфа гирокомпаса вычисляются исходя из полученных измерений Р=0,5(ΩГ1+ΩГ2).
Значение компенсационной поправки к току определяется выражением:
Iр=-PH/Кдм,
где Kдм[г•см/а] - передаточный коэффициент датчика момента по току;
Н[г•см•с] - кинетический момент гироскопа.
После добавления компенсационного тока, пропорционального вычисленному восточному дрейфу, к току управления вертикальным датчиком момента восточный дрейф гироскопа будет скомпенсирован и после включения режима гирокомпаса его погрешность в соответствии с выражением (1) будет определяться только невыставкой Δ: ΔK = Δ.
Зная истинный курс гирокомпаса и сравнивая его с вырабатываемым, вычисляем поправку к показаниям датчика курса
Установка платформы ГК на румбы 90o и 270o может осуществляться либо вручную, либо подачей большого тока в горизонтальный датчик момента ГК, либо подачей слабого сигнала в усилитель следящей азимутальной системы ГК.
Для определения сигналов ΩГ1, ΩГ2 с погрешностью 0,005o/ч достаточно установить платформу ГК на курсы 90o и 270o с погрешностью 1o÷2o. Поправка к курсу ΔК может либо добавляться к выходному сигналу датчика курса, либо смещать его сигнал путем дополнительного поворота ротора датчика относительно его статора в заарретированном нулевом положении на угол, при котором сигнал с датчика курса равен  Предложенный способ может быть реализован, например, в конструкции гирокомпаса, структура которого представлена на фиг.2.
Предложенный способ может быть реализован, например, в конструкции гирокомпаса, структура которого представлена на фиг.2.
Гирокомпас содержит:
- платформу 1;
- гироскоп 2;
- вертикальный и горизонтальный датчики момента 3 и 4;
- датчик угла 5;
- электронный блок 6;
- пульт оператора 7;
- акселерометр 8.
ГК работает следующим образом. Гирокомпас удерживает платформу 1 в северном направлении благодаря подаваемым в горизонтальный 3 и вертикальный 4 датчики момента токам, формируемым в электронном блоке 6 по сигналу с акселерометра 8. Составляющая тока, компенсирующая восточный дрейф в вертикальный датчик момента, формируется в электронном блоке 6 по величине дрейфа Р, вводимой с пульта оператора 7. Компенсация невыставки Δ осуществляется смещением сигнала датчика курса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 1999 |
|
RU2153152C1 |
| ГИРОАЗИМУТГОРИЗОНТКОМПАС | 2001 |
|
RU2202769C2 |
| СПОСОБ КАЛИБРОВКИ АКСЕЛЕРОМЕТРОВ | 2002 |
|
RU2249793C2 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА | 1999 |
|
RU2160886C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ В ГИРОСКОПЕ | 2001 |
|
RU2196303C2 |
| СПОСОБ СТАБИЛИЗАЦИИ МАСШТАБНОГО КОЭФФИЦИЕНТА ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА | 1999 |
|
RU2160885C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ ПРИ НЕТОЧНОЙ ВЫСТАВКЕ ГИРОСКОПА НА ОБЪЕКТЕ | 2004 |
|
RU2267748C1 |
| СПОСОБ ФАЗОВОЙ МОДУЛЯЦИИ В КОЛЬЦЕВОМ ИНТЕРФЕРОМЕТРЕ ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2194247C1 |
| ОДНОМОДОВЫЙ ОДНОПОЛЯРИЗАЦИОННЫЙ СВЕТОВОД | 2001 |
|
RU2223522C2 |
| СПОСОБ НАЧАЛЬНОЙ ВЫСТАВКИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2002 |
|
RU2215994C1 |
Изобретение относится к области навигационного приборостроения и может быть использовано для определения и компенсации основных погрешностей гирокомпасов. Способ коррекции гирокомпаса включает запуск гирокомпаса и выдержку в течение времени, сравнение курса гирокомпаса с истинным курсом стенда, формирование поправки разности курсов и смещение выходного курса на величину поправки. Перед запуском гирокомпаса разворачивают платформу гирокомпаса вокруг вертикальной оси, при этом ось чувствительности гирокомпаса направлена на север. Включают режим гироазимута и измеряют ток в вертикальном датчике момента. Вновь разворачивают платформу гирокомпаса вокруг вертикальной оси, при этом ось чувствительности гирокомпаса направлена на юг. Включают режим гироазимута и операцию измерения тока в вертикальном датчике момента повторяют. Токи в вертикальном датчике момента пропорциональны угловым скоростям ΩГ1, и ΩГ2, управления гирокомпасом вокруг горизонтальной оси. Вычисляют дрейф вокруг восточной оси по формуле P = 0,5(ΩГ1-ΩГ2). Формируют компенсационную поправку по току по формуле Ip=-РН/Kдм, где Kдм [г•см/а] - передаточный коэффициент датчика момента по току, Н[г•см•с] - кинетический момент гироскопа. Подают ток Ip на вертикальный датчик момента гироскопа. Технический результат состоит в повышении точности гирокомпаса. 2 ил.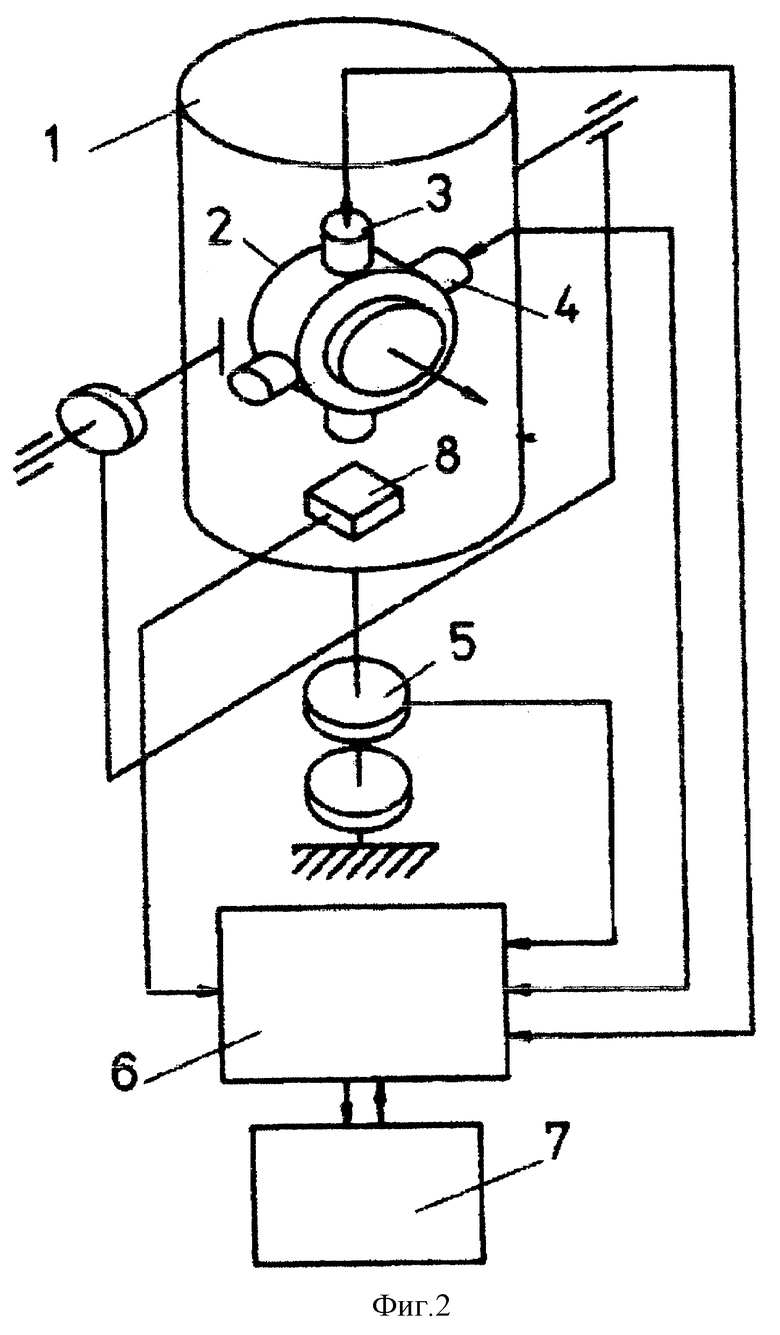
Способ коррекции гирокомпаса, включающий запуск гирокомпаса и его выдержку в течение времени, необходимого для достижения установившегося теплового и электрического состояния, сравнение курса гирокомпаса с истинным курсом стенда, формирование поправки, равной разности курсов, и смещение выходного курса гирокомпаса на величину поправки, отличающийся тем, что, с целью повышения точности за счет определения и компенсации основных погрешностей гироскопа, перед указанными операциями дополнительно разворачивают платформу гирокомпаса вокруг вертикальной оси так, чтобы горизонтальная ось чувствительности была направлена на север, затем включают режим гироазимута и измеряют ток в вертикальном датчике момента, пропорциональный угловой скорости управления гирокомпасом вокруг горизонтальной оси ΩГ1, затем вновь разворачивают платформу гирокомпаса вокруг вертикальной оси так, чтобы горизонтальная ось чувствительности гирокомпаса была направлена на юг, включают режим гироазимута и вновь измеряют ток в вертикальном датчике момента, пропорциональный скорости управления ΩГ2, вычисляют дрейф вокруг восточной оси по формуле P = 0,5(ΩГ1+ΩГ2), формируют компенсационную поправку к току по формуле
Ip=-РН/Kдм,
где Kдм[г•см/а] - передаточный коэффициент датчика момента по току;
Н[г•см•с] - кинетический момент гироскопа,
и подают ток Ip на вертикальный датчик момента гироскопа.
| КОГАН В.М., ЧИЧИНАДЗЕ М.В | |||
| Судовой гироазимуткомпас "Вега" | |||
| - М.: Транспорт, 1983, с.87, 100 | |||
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 1999 |
|
RU2153152C1 |
| Способ определения поправки курса двухрежимного одногироскопного курсоуказателя | 1991 |
|
SU1838760A3 |
| Гирокомпас | 1991 |
|
RU2000542C1 |
| US 4458426 А, 10.07.1984 | |||
| Способ уменьшения инерционности радиометров и термоэлементов и устройство для его осуществления | 1957 |
|
SU114457A1 |
