Изобретение относится к области навигации и может быть использовано в зонах отсутствия или неустойчивого приема сигналов спутниковых радионавигационных систем: под водой, под землей, в горных массивах, в зданиях, в тоннелях, в метро, при облачной погоде и т.д. Известен способ определения местоположения подвижных наземных объектов и устройство для его реализации по патенту [1].
Известный способ заключается в следующем:
1) В калибровочном цикле осуществляют разворот подвижного объекта и проводят определение контрольных значений горизонтальных проекций суммарного вектора напряженности МПЗ.
2) По контрольным значениям горизонтальных проекций суммарного вектора напряженности МПЗ определяют коэффициенты коррекции горизонтальных составляющих магнитного поля.
3) Измеряют в каждом рабочем цикле приращения пройденного пути, усредненные значения ускорения силы тяжести и проекции суммарного вектора напряженности магнитного поля на оси приборной системы координат.
4) По измеренным усредненным значениям проекций ускорения силы тяжести и проекций суммарного вектора напряженности МПЗ и магнитного поля объекта, с учетом коэффициентов коррекций, полученных в калибровочном цикле, определяют значения горизонтальных проекций напряженности МПЗ на оси горизонтальной системы координат объекта.
5) По значениям горизонтальных проекций вектора напряженности МПЗ определяют угол направления движения и, с учетом приращения пройденного пути, определяют приращения координат, по которым, с учетом координат начальной точки, определяют координаты объекта.
Способ и устройство по патенту [1] относятся к автономным навигационным системам геомагнитного типа, использующим МПЗ для определения направления движения и одометрическую систему счисления пути для определения приращения пути.
Недостатком известного способа и устройства является низкая точность определения координат подвижного объекта и угла направления движения в моменты разгона и торможения, при резких поворотах, а также в случаях перемагничивания корпуса подвижного объекта в процессе движения из-за воздействия паразитных магнитных полей от внешних источников.
Известен способ комплексирования инерциальных навигационных систем и комплексированная навигационная система по патенту [2]. В способе используется инерциальная навигационная система с коррекцией от приемника спутниковой навигационной системы по корректирующим сигналам, сформированным фильтром коррекции по разности скоростей инерциальной навигационной системы и датчика базовой скорости, а также по разности сигналов с горизонтальных акселерометров, преобразованных интегратором и датчиком базовой скорости. Устройство состоит из автономной инерциальной навигационной системы, приемника спутниковой навигационной системы, сумматора, фильтров коррекции, интеграторов и фильтров управления. Указанные способ и устройство весьма сложны в реализации, причем устройство имеет большие габариты и потребляемую мощность, вследствие чего широкое применение их ограничено для использования в подвижных объектах при определении координат местоположения.
Известен способ определения местоположения подвижных объектов и устройство для его реализации по патенту [3]. В способе проводятся измерения горизонтальных проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта. В каждом рабочем цикле измеряют усредненные значения проекций суммарного вектора напряженности и ускорения силы тяжести на оси приборной системы координат. По значениям горизонтальных проекций вектора напряженности магнитного поля, с учетом приращения пути и поправки направления, определяют приращения координат и угол направления движения. С учетом координат исходной точки определяют координаты объекта. Устройство содержит датчики магнитного поля, датчики вертикали, блок расчета горизонтальных проекций магнитного поля, блок управления, датчик перемещения и навигационный блок. Навигационный блок содержит блок расчета приращения координат, блок расчета угла и сумматор. Способ и устройство относится к автономным навигационным системам магнитного типа, использующим магнитное поле Земли для определения направления движения, и одометрическую систему счисления пути.
Недостатками указанного способа и устройства являются низкая точность определения координат местоположения и угла направления движения, а также сложность их использования. Это обусловлено ошибками определения координат в автономных навигационных системах магнитного типа. При этом ошибки, в зависимости от величины приращений пройденного пути, с течением времени накапливаются, что требует периодической коррекции определения координат с использованием топографических карт, информации об известных координатах и т.д. Точность известного способа и устройства снижается в условиях воздействий внешних паразитных полей, от линий электропередач, в зонах магнитных аномалий. Вводимые поправки направления движения зависят от магнитного склонения, сближения меридианов в данной местности и рассогласования измерительной оси датчика продольной оси подвижного объекта.
На подвижных системах используются одометрические системы счисления пути, основанные на подсчете числа оборотов колеса или привода гусеницы. Коэффициент пути, определяющий пересчет числа оборотов в пройденном пути, зависит от состояния ходовой части: типа шин, давления в них и т.п., а также от характера местности. Все это усложняет использование известного способа и устройства и ограничивает область их применения, а геомагнитные датчики вносят большие погрешности при определении дирекционного угла, т.к., находясь в какой-либо местности, нужно учитывать действующее магнитное склонение конкретно для данного участка местности.
Известен способ инерциальной навигации и устройство для его осуществления по патенту [4]. Способ инерциальной навигации заключается в использовании линейных акселерометров, работающих в режиме автоколебаний, пропорциональных ускорению и периоду автоколебаний. Одновременно с ускорением объекта измеряют интервал времени, в течение которого измеряют ускорение, при помощи показаний акселерометра определяют составляющие вектора скорости и радиус-вектора по направлению оси чувствительности акселерометров на этом интервале. Значения показаний акселерометра за каждый период автоколебаний перемножают, а результаты для конкретного участка траектории суммируют.
Недостатками указанного способа и устройства являются низкая точность измерения интервалов времени, т.к. нет синхронизации с единым временем, что значительно снижает точность в расчете координат.
Известен способ инерциальной навигации и устройство для его осуществления по патенту [5], заключающийся в следующем:
1) В калибровочном цикле осуществляют разворот подвижного объекта из начальной точки на 270 градусов через фиксированные положения 0, 100, 180 и 270 градусов, и в каждом положении определяют значения горизонтальных проекций вектора напряженности магнитного поля.
2) По контрольным значениям горизонтальных проекций суммарного вектора напряженности МПЗ определяют коэффициенты коррекции горизонтальных составляющих магнитного поля.
3) Измеряют в каждом рабочем цикле приращения пройденного пути, усредненные значения ускорения силы тяжести и проекции суммарного вектора напряженности магнитного поля на оси приборной системы координат.
4) По измеренным усредненным значениям проекций ускорения силы тяжести и проекций суммарного вектора напряженности МПЗ и магнитного поля объекта, с учетом коэффициентов коррекций, полученных в калибровочном цикле, определяют значения горизонтальных проекций напряженности МПЗ на оси горизонтальной системы координат объекта.
5) По значениям горизонтальных проекций вектора напряженности МПЗ определяют угол направления движения и, с учетом приращения пройденного пути, определяют приращения координат, по которым, с учетом координат начальной точки, определяют координаты объекта.
6) С помощью спутниковых радионавигационных систем (СРНС) измеряют координаты объекта, с учетом которых проводят коррекцию относительных координат и координат начальной точки с помощью датчика базовой скорости.
Работа устройства основана на комплексной обработке информации, поступающей от автономной навигационной системы магнитного типа и приемника СРНС, входящего в состав устройства.
Недостатками известного способа и устройства являются:
1) Низкое преобразование аналоговых сигналов, поступающих с датчиков, в цифровой код и процесс усреднения в течение рабочего цикла, занимающее период до 2 секунд, не позволяет определять местоположение подвижных объектов при высокой скорости движения (при движении летательного аппарата 8-10 км/с).
2) Низкая скорость аппроксимации, занимающая период до 7 секунд, не позволяет точно оценить угол направления движения, особенно при поворотах.
3) Невозможность определения пространственных координат.
4) Девиация магнитного поля не устраняется автоматически в рабочем режиме, вследствие чего необходимо на открытой площадке поворачивать объект из начальной точки на 270 градусов через фиксированные положения 0, 100, 180 и 270 градусов и в каждом определять значения горизонтальных проекций вектора напряженности магнитного поля.
5) Невозможность определения координат в зонах влияния сильных электромагнитных помех и магнитных аномалий, например в местах Курской магнитной аномалии.
6) Нет синхронизации со шкалой единого времени, что приводит к ошибкам определения координат и погрешностям при определении пройденного пути.
Точность известного способа и устройства снижается также в условиях воздействия внешних паразитных полей от линий электропередач, в зонах магнитных аномалий, влияния магнитных полей соседних объектов и магнитного поля самого объекта, магнитного склонения для отдельной местности, внешних направленных магнитных и электромагнитных факторов воздействия. Также недостатком известного способа и устройства является низкая функциональная и параметрическая надежность.
Наиболее близкими по технической сущности, являются способ определения местоположения подвижных объектов и комплексированная навигационная система для его реализации, описанные в патенте [6], принятые за прототип.
Способ-прототип заключается в следующем:
1) В начале с помощью СРНС определяют исходные координаты объекта либо вводят вручную, с помощью топографических карт.
2) Затем в калибровочном цикле при использовании геомагнитной навигационной системы угловой ориентации определяют контрольные значения горизонтальных проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта. В калибровочном цикле формируют оси гироскопической системы угловой ориентации в виде географически ориентированного трехгранника, в котором одна ось  лежит в плоскости географического меридиана, другая ось
лежит в плоскости географического меридиана, другая ось  направлена на восток, а третья ось
направлена на восток, а третья ось  совпадает с направлением гравитационного поля силы тяжести.
совпадает с направлением гравитационного поля силы тяжести.
3) В каждом рабочем цикле с помощью геомагнитной и гироскопической систем угловой ориентации измеряют усредненные за время рабочего цикла значения проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта, значения проекций векторов угловой скорости и значения проекций ускорения силы тяжести на оси приборной системы координат.
4) По измеренным значениям вышеуказанных проекций, с учетом коэффициентов коррекции, полученных в калибровочном цикле, определяют значения горизонтальных проекций векторов напряженности магнитного поля на оси горизонтальной системы координат объекта и проекций векторов угловой скорости на оси сферической системы координат.
5) Измеряют величины кажущихся ускорений движения за время рабочего цикла, по которым, путем интегрального преобразования по времени, вычисляют скорость движения объекта, по которой, путем интегрального преобразования по времени, вычисляют пройденный объектом путь, одновременно вычисляя величину приращения пути и проекции пути с учетом углов наклона объекта, дирекционных углов и поправки направления движения.
6) Измеряют географический азимут направления движения объекта с помощью гироскопической системы угловой ориентации, а также осуществляют процесс комплексного измерения азимутального угла направления движения с помощью геомагнитной и гироскопической систем угловой ориентации.
7) Определяют дирекционные углы и координаты объекта, по которым в каждом рабочем цикле проводят коррекцию относительных координат и координат исходной точки объекта, а также осуществляют процесс комплексного измерения азимутального угла с помощью СРНС, геомагнитной и гироскопической систем угловой ориентации.
8) С учетом координат исходной точки определяют координаты подвижного объекта, получаемые от навигационных систем с геомагнитной и гироскопической угловой ориентацией. Далее определяют относительные координаты подвижного объекта путем суммирования приращения координат подвижного объекта, измеренных ранее в каждом рабочем цикле. Затем определяют координаты подвижного объекта путем суммирования относительных координат и координат исходной точки.
9) По текущим значениям координат объекта, которые визуально фиксируются на электронной карте маршрута в реальном времени, оценивают параметрическую надежность системы. В то же время производят анализ показаний координат, вычисленных на основе значений, полученных от геомагнитной, гироскопической и спутниковой систем, а также дирекционных углов направления движения. По результатам вторичной обработки в автономном сегменте навигационного алгоритма с учетом линейного анализа величины отклонений берут в расчет показания той системы, которая выдает наиболее точные показания в зависимости от текущих внешних воздействий. При этом процессы и функции, выполняемые вышеописанным навигационным алгоритмом, синхронизируют со шкалой единого времени.
10) При расхождении значений координат в автономном режиме производится оценка достоверности измерений, определяются зоны магнитных, электромагнитных, ионизационных и гравитационных аномалий. Производится оценка функциональной надежности системы.
11) С помощью СРНС измеряют координаты подвижного объекта, с учетом которых проводят коррекцию исходной точки, относительных координат и угловой ориентации объекта.
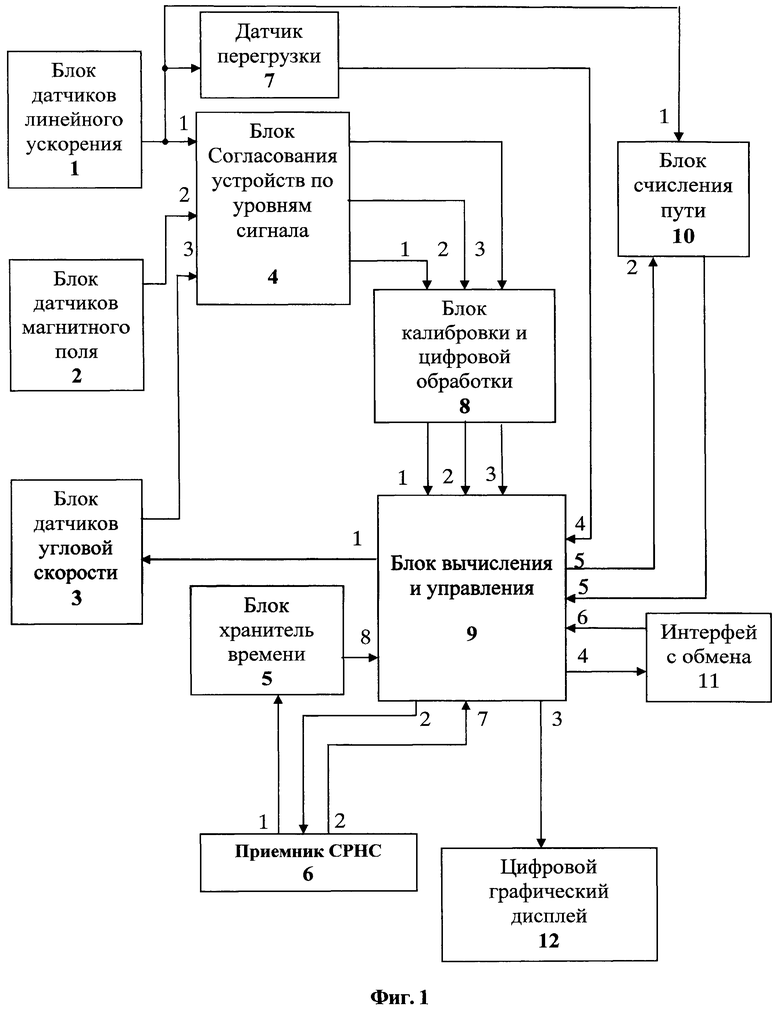
Система-прототип, функциональная схема которой приведена на фиг.1, содержит блок датчиков линейного ускорения 1, блок датчиков магнитного поля 2, приемник спутниковых радионавигационных систем (СРНС) 8, блок датчиков угловой скорости 17, блок согласования устройств по уровням сигнала 13, блок хранения времени 7, датчик перегрузки 12, блок калибровки и цифровой обработки 14, блок вычисления и управления 15, блок счисления пути 6, цифровой графический дисплей 18 и интерфейс обмена 16.
Работа системы-прототипа основана на комплексной обработке информации, поступающей от автономных навигационных систем с гироскопической и геомагнитной угловой ориентацией, а также от приемника СРНС.
Недостатком известного способа и системы является невозможность определения пространственных координат без СРНС и, как следствие, - невозможность работы в местах, где определение Z-координаты (высоты или глубины) имеет преимущественное значение, например в горных ущельях, под водой, под землей и т.д.
Задача, на решение которой направлено заявляемое изобретение, заключается в создании способа определения пространственных координат подвижных объектов и комплексной навигационной системы, использующей инерциальную и геомагнитную системы навигации, с возможностью коррекции по спутниковым радионавигационным системам, с повышенной точностью, достоверностью измерительных характеристик движения, а также повышенной функциональной и параметрической надежностью в зонах отсутствия или неустойчивого приема сигналов спутниковых радионавигационных систем.
Технический результат, который может быть получен при осуществлении предлагаемого способа и системы, заключается в высокоточном определении пространственных координат с возможностью мониторинга.
Для решения поставленной задачи заявляется способ определения пространственных координат подвижных объектов, заключающийся в том, что проводят первичную комплексную обработку информации, при которой измеряют контрольные значения абсолютного давления, контрольные значения проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта, проекции ускорения силы тяжести, проекции векторов угловой скорости на ортогональные оси навигационной системы координат, по значениям которых проводят вторичную комплексную обработку информации, при которой производят коррекцию и фильтрацию полученных значений, и с учетом, по меньшей мере, угловых и путевых поправок определяют параметры угловой ориентации и параметры пространственного движения, с учетом пространственных координат начальной точки определяют приращения пространственных координат, по которым производят определение относительных пространственных координат суммированием приращений пространственных координат, и определяют текущие значения пространственных координат суммированием относительных пространственных координат и пространственных координат начальной точки, навигационные данные и полученную траекторию маршрута сохраняют, при этом процессы и функции, выполняемые вышеописанным навигационным алгоритмом, синхронизируют со шкалой эталона времени.
Дополнительно в способе при первичной комплексной обработке информации, учитывая изменение времени, плотности и температуры окружающей среды, осуществляют преобразование и обработку сигналов навигационных измерителей с целью определения соответствующих навигационных параметров, затем при вторичной комплексной обработке информации осуществляют программную установку порогов амплитуды тревоги, при превышении которых векторы состояния априорно известной динамической системы дооценивают с помощью рекурсивного фильтра Калмана, используя рад неполных и зашумленных измерений.
Дополнительно в способе значения угловых и путевых поправок определяют по результатам контрольного хода на участке, пространственные координаты начальной и конечной точек которого известны.
Дополнительно в способе определение Z-координаты без СРНС осуществляют путем измерения абсолютного давления, пересчитывая Z-координату из проекции пройденного расстояния от начальной точки с учетом угловых и путевых поправок либо с помощью электронной векторной карты по двум координатам (X, Y).
Дополнительно в способе магнитное склонение для данной местности определяют, используя магнитные карты повышенной точности, учитывающие специфику магнитной ситуации, с возможностью их обновления с помощью электронных носителей или через Интернет.
Дополнительно в способе траекторию маршрута сохраняют в вычислительном модуле, а затем по запросу передают на web-сервер через Интернет, осуществляют обмен пространственными координатами между абонентами, предпочтительно по протоколу TCP/IP с отображением траекторий движения подвижных объектов на электронной карте в реальном времени.
Дополнительно в способе при возможности приема сигналов радионавигационных систем производят коррекцию навигационной информации по СРНС.
Дополнительно в способе при отсутствии сигналов СРНС проводят коррекцю навигационной информации по базовым станциям либо с помощью других ближайших абонентов, пространственные координаты которых известны.
Решение поставленной задачи достигается также тем, что заявляется комплексная навигационная система для определения пространственных координат подвижных объектов, содержащая вычислительный модуль, первая группа входов-выходов которого двунаправленной шиной соединена с группой входов-выходов цифрового блока датчиков линейного ускорения, вторая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов датчиков магнитного поля, третья группа входов-выходов двунаправленной шиной соединена с группой входов-выходов цифрового блока датчиков гироскопов, четвертая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов цифрового датчика абсолютного давления, пятая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов цифрового датчика температуры, шестая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов цифрового блока счисления пути, седьмая группа входов-выходов двунаправленной шиной соединена с первой группой входов-выходов цифрового блока хранения времени, девятая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов сенсорного дисплея, десятая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов модема, восьмая группа входов-выходов двунаправленной шиной соединена с первой группой входов-выходов приемника спутниковых радионавигационных систем (СРНС), вторая группа входов-выходов которого двунаправленной шиной соединена со второй группой входов-выходов цифрового блока хранения времени.
При этом в системе вычислительный модуль выполнен с возможностью определения без СРНС текущих значений крена, тангажа, путевого угла, пространственных координат местоположения относительно эллипсоида WGS-84, высоты и глубины относительно геоида, горизонтальных и вертикальных составляющих путевой скорости; модем выполнен с возможностью коррекции навигационной информации по базовым станциям или с помощью других ближайших абонентов с известными координатами, обеспечения функции мониторинга, а также обновления навигационного алгоритма и электронных карт.
Сущность изобретения поясняется с помощью следующих чертежей.
На фиг.1 представлена функциональная схема системы-прототипа.
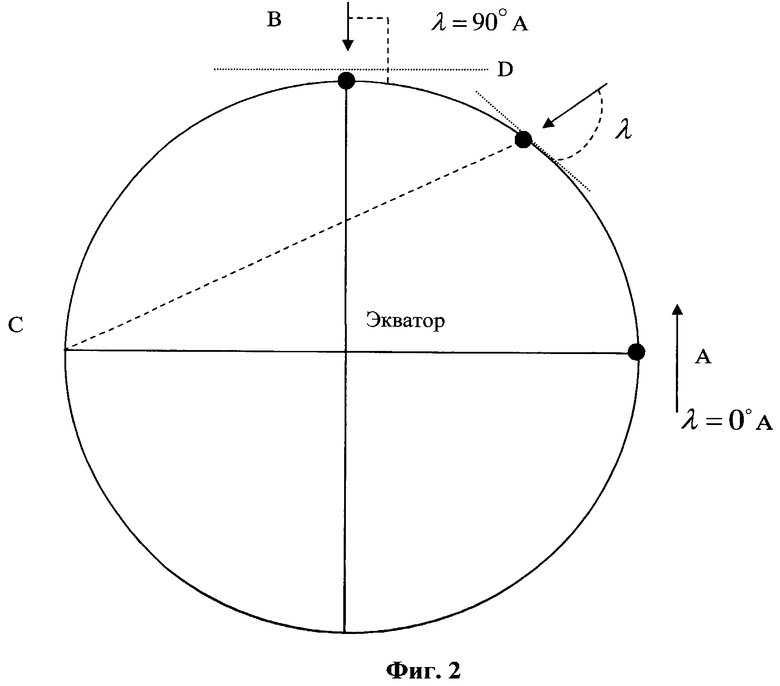
На фиг.2 представлена зависимость угла магнитного склонения от широты.
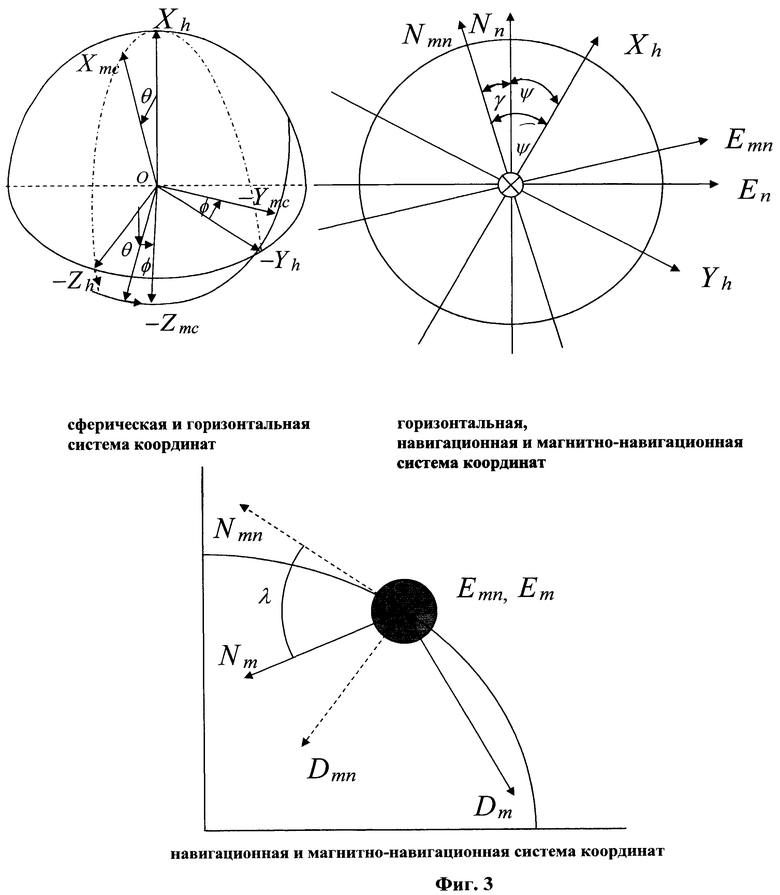
На фиг.3 показано взаиморасположение систем координат.
На фиг.4 представлена блок-схема комплексной навигационной системы для определения пространственных координат подвижных объектов.
На фиг.5 отражена векторная диаграмма перемещения маршрута подвижного объекта с использованием геомагнитной и инерциальной систем навигации, с коррекцией по спутниковым навигационным системам.
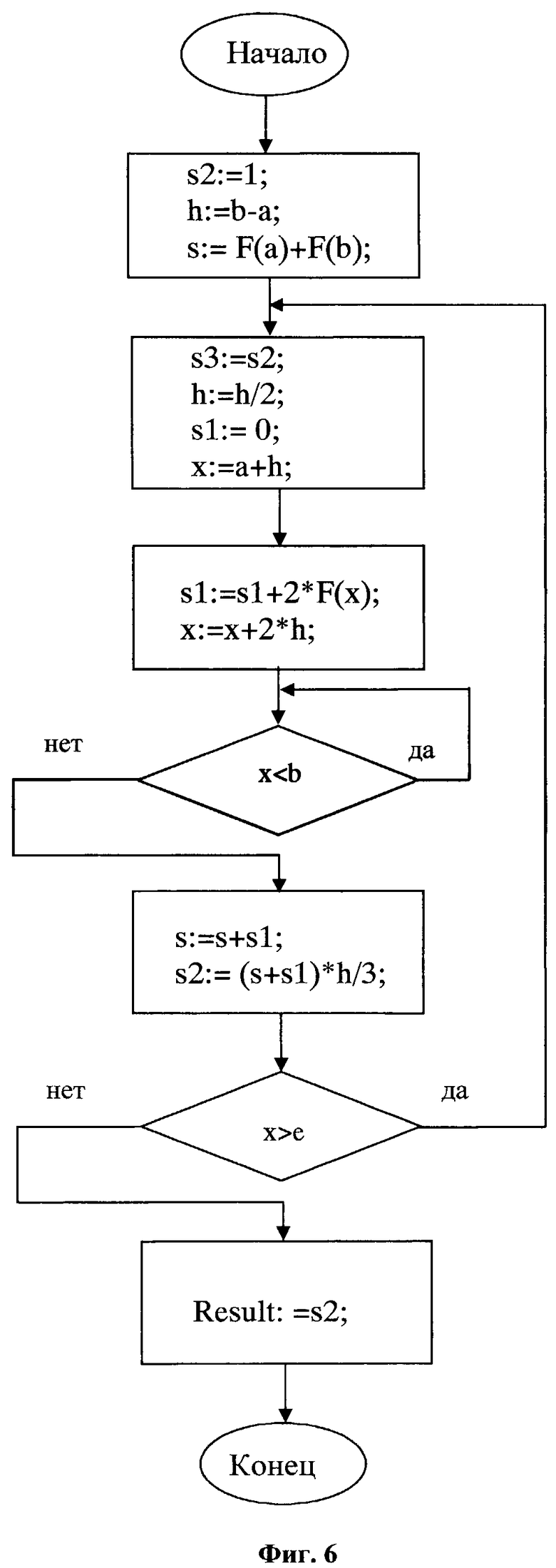
На фиг.6 представлен алгоритм численного метода интегрирования методом Симпсона, с оценкой точности.
Заявляемый способ определения пространственных координат подвижных объектов заключается в следующем.
Вначале, в случае наличия сигналов СРНС, определяют исходные пространственные координаты объекта X0, Y0, Z0, либо, при отсутствии сигналов СРНС, исходные пространственные координаты определяют либо с помощью базовых станций, либо через других ближайших абонентов, пространственные координаты которых известны, либо вводят вручную по векторной карте, при этом значение магнитного склонения (поправки направления Δα для данной местности), информация о Z0 и рельефе местности автоматически берется из векторной карты. Затем проводят первичную комплексную обработку информации, где осуществляют преобразование и обработку сигналов навигационных измерителей с целью определения соответствующих навигационных параметров, при которой, учитывая изменение времени, плотности и температуры окружающей среды, измеряют контрольные значения абсолютного давления, контрольные значения проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта, проекции ускорения силы тяжести, проекции векторов угловой скорости на ортогональные оси навигационной системы координат.
Далее по полученным значениям проводят вторичную комплексную обработку информации, при которой:
- производят коррекцию и фильтрацию полученных значений, и с учетом, по меньшей мере, угловых и путевых поправок, определяют параметры угловой ориентации и параметры пространственного движения, осуществляют программную установку порогов амплитуды тревоги, при превышении которых векторы состояния априорно известной динамической системы дооценивают с помощью рекурсивного фильтра Калмана, используя ряд неполных и зашумленных измерений, определяют и уточняют пространственные координаты, параметры угловой ориентации, параметры пространственного движения, производят оценку достоверности измерений и функциональной надежности системы.
Измеряют величины кажущихся ускорений движения за время рабочего цикла, по которым, путем интегрального преобразования по времени, вычисляют скорость движения объекта, по которой, путем интегрального преобразования по времени, вычисляют пройденный объектом путь и проекции пути с учетом углов наклона объекта, дирекционных углов и поправки направления движения.
Кроме того, величину приращения пути могут определять с использованием одометрической системы счисления пути, доплеровской или другой системы, подключенной к цифровому блоку счисления пути.
По измеренным и отфильтрованным ранее значениям трех проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта производят определение угла направления движения и с учетом приращения пути производят определение приращения пространственных координат, по которым с учетом пространственных координат начальной точки производят определение относительных пространственных координат суммированием приращений пространственных координат и определяют текущие значения пространственных координат суммированием относительных пространственных координат и пространственных координат начальной точки.
Комплексируют с помощью инерциальной системы угол направления движения в моменты влияния внешних паразитных магнитных полей.
Значения угловых и путевых поправок определяют по результатам контрольного хода на участке, пространственные координаты начальной и конечной точек которого известны.
Определение Z-координаты без СРНС осуществляют путем измерения абсолютного давления, пересчитывая Z-координату из проекции пройденного расстояния от начальной точки с учетом угловых и путевых поправок либо с помощью электронной векторной карты по двум координатам (X, Y).
Магнитное склонение для данной местности определяют, используя магнитные карты повышенной точности, учитывающие специфику магнитной ситуации, с возможностью их обновления с помощью электронных носителей или через Интернет.
Навигационные данные (пространственные координаты, крен, тангаж, скорость, путевые и угловые параметры) и траектория маршрута сохраняются во внутреннюю память вычислительного модуля, а затем по запросу могут быть переданы на web-сервер через Интернет; осуществляется обмен пространственными координатами между абонентами, предпочтительно по протоколу TCP/IP с отображением траекторий движения подвижных объектов на электронной карте в реальном времени.
При наличии сигналов СРНС проводят измерение пространственных координат объекта, по которым производят коррекцию относительных пространственных координат и пространственных координат начальной точки; при этом функции и процессы, выполняемые вышеописанным навигационным алгоритмом, синхронизируют со шкалой эталона времени.
При расхождении значений пространственных координат в автономном режиме производится оценка достоверности измерений, определяются зоны магнитных, электромагнитных, ионизационных и гравитационных аномалий. Производится оценка функциональной надежности системы.
Настоящее изобретение может быть реализовано с помощью устройства, представляющего собой комплексную навигационную систему, блок-схема которой представлена на фиг.4, где введены следующие обозначения:
1 - цифровой блок датчиков линейного ускорения (акселерометр);
2 - цифровой блок датчиков магнитного поля;
3 - цифровой блок датчиков гироскопов;
4 - цифрвой датчик абсолютного давления;
5 - цифрвой датчик температуры;
6 - цифровой блок счисления пути;
7 - цифрвой блок хранения времени;
8 - приемник спутниковых радионавигационных систем (СРНС);
9 - сенсорный дисплей;
10 - модем;
11 - вычислительный модуль.
Заявляемая комплексная навигационная система для определения пространственных координат подвижных объектов содержит вычислительный модуль 11, первая группа входов-выходов которого двунаправленной шиной соединена с группой входов-выходов цифрового блока датчиков линейного ускорения 1, вторая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов датчиков магнитного поля 2, третья группа входов-выходов двунаправленной шиной соединена с группой входов-выходов цифрового блока датчиков гироскопов 3, четвертая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов цифрового датчика абсолютного давления 4, пятая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов цифрового датчика температуры 5, шестая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов цифрового блока счисления пути 6, седьмая группа входов-выходов двунаправленной шиной соединена с первой группой входов-выходов цифрового блока хранения времени 7, девятая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов сенсорного дисплея 9, десятая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов модема 10, восьмая группа входов-выходов двунаправленной шиной соединена с первой группой входов-выходов приемника СРНС 8, вторая группа входов-выходов которого двунаправленной шиной соединена со второй группой входов-выходов цифрового блока хранения времени 7.
Работа устройства основана на комплексной обработке информации в вычислительном модуле 11, которая поступает на него с цифрового блока датчиков линейного ускорения 1, цифрового блока датчиков магнитного поля 2, цифрового блока датчиков гироскопов 3, цифрового датчика абсолютного давления 4, цифрового датчика температуры 5, цифрового блока счисления пути 6, цифрового блока хранения времени 7, приемника СРНС 8, сенсорного дисплея 9 и модема 10.
Рассмотрим пример реализации предлагаемого способа.
Вначале в случае наличия сигналов СРНС определяют исходные пространственные координаты объекта X0, Y0, Z0, либо, при отсутствии сигналов СРНС, исходные пространственные координаты определяют либо с помощью базовых станций, либо через других ближайших абонентов, пространственные координаты которых известны, либо вводят вручную по векторной карте, при этом значение магнитного склонения (поправки направления Δα для данной местности), информация о Z0 и рельефе местности автоматически берется из векторной карты.
В исходном состоянии блоки датчиков гироскопов 3 и датчиков линейного ускорения 1 переходят в режим начального нулевого смещения, причем по электронной таблице коррекции автоматически устанавливается точная калибровка смещений осей цифровых блоков датчиков линейного ускорения 1 и гироскопов 3 с учетом температуры окружающей среды.
В режиме измерения цифровые блоки датчиков линейного ускорения 1, магнитного поля 2 и гироскопов 3 непрерывно формируют на своих выходах цифровые сигналы, пропорциональные соответствующим значениям проекций векторов HXM, HYM, HZM суммарного магнитного поля Земли и магнитного поля объекта, проекций векторов ускорения силы тяжести AX, AY, AZ и проекций векторов угловой скорости VX, VY, VZ на оси навигационной системы координат OXYZ (фиг.3).
Кроме того, с цифровых датчиков абсолютного давления 4 и температуры 5 цифровые сигналы поступают в вычислительный модуль 11 для определения высоты, которую можно выразить формулой:
где R - газовая постоянная (29,27 м/град.);
PH - давление на высоте полета;
P0 - давление на уровне начала отсчета;
T0 - температура на уровне начала отсчета;
tгр - градиент изменения температуры с высотой (0,0065 град./м).
При наличии сигналов СРНС сигналы коррекции навигационной информации подвижного объекта с приемника СРНС 8 поступают в блок хранения времени 7, с которого сигнал поступает на вычислительный модуль 10 для синхронизации метки времени и обеспечения временной стабильности. В отсутствие сигналов СРНС по значениям  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  и по значению вычисленного приращения пройденного пути δS, с учетом поправки направления Δα, определяют приращение пространственных координат в вычислительном модуле 11 по формуле:
и по значению вычисленного приращения пройденного пути δS, с учетом поправки направления Δα, определяют приращение пространственных координат в вычислительном модуле 11 по формуле:

В каждом рабочем цикле в вычислительном модуле 11 по значениям проекций суммарного вектора напряженности магнитного поля HXM, HYM, HZM, проекциям векторов ускорения силы тяжести AX, AY, AZ, значениям проекций векторов угловой скорости 

 производят коррекцию и фильтрацию, используя предпочтительно фильтр Калмана [9]. Далее с учетом времени и температуры, а также значения поправки направления Δα и значения магнитного склонения λ проводят расчет дирекционного угла направления движения α, определяют приращения пройденного пути δS.
производят коррекцию и фильтрацию, используя предпочтительно фильтр Калмана [9]. Далее с учетом времени и температуры, а также значения поправки направления Δα и значения магнитного склонения λ проводят расчет дирекционного угла направления движения α, определяют приращения пройденного пути δS.
По значениям приращений пространственных координат определяют относительные пространственные координаты ΔX, ΔY, ΔZ в соответствии со значениями исходной точки X0, Y0, Z0. При отсутствии приема сигналов СРНС значения относительных пространственных координат и пространственных координат исходной точки суммируются в вычислительном модуле 11, который обеспечивает определение пространственных координат с отображением навигационной информации на сенсорном графическом дисплее 9. Затем пространственные координаты по запросу могут быть переданы на web-сервер через Интернет с возможностью обмена пространственными координатами между абонентами, предпочтительно по протоколу TCP/IP; см [6].
Далее рассмотрим пример реализации алгоритма работы комплексной навигационной системы более подробно.
Напряженность магнитного поля Земли составляет 0,5-0,6 Гс, моделью которого является магнит с 2-мя полюсами - север и юг; эта модель генерирует поле, которое «указывает» на север. Магнитное поле параллельно поверхности Земли. Если компас параллелен поверхности Земли, то он измеряет азимут по направлению магнитного поля. Стрелка компаса наклонена к Земле за исключением экватора, и угол наклона изменяется в зависимости от широты места.
Фиг.2 показывает зависимость УМС от широты: УМС на экваторе равен нулю, на полюсах он равен 100 градусов. В точке «D» компас указывает в точку «С». УМС изменяется быстро на дуге «BD» и медленно на дуге «ВС». Магнитный компас вычисляет азимут путем измерения магнитного поля.
Следует ввести несколько систем отсчета для того, чтобы правильно вычислить азимут: сферическую, горизонтальную, навигационную, магнитно-навигационную, магнитную. Для сферической системы координат (Xmc, Ymc, Zmc) началом отсчета является компас, причем каждая ось системы координат соответствует своему магнитному датчику. Горизонтальной (Xh, Yh, Zh) является сферическая система координат при отсутствии крена компаса. Навигационная система координат (Nn, En, Dn) - это система локального уровня, оси которой соответствуют географическому северному полюсу, востоку и направлению, перпендикулярному одновременно северу и востоку (к поверхности Земле). Магнитно-навигационная (Nmn, Emn, Dmn) система повернута относительно навигационной на угол, равный УМС по вертикальной оси. И, наконец, магнитная (Nm, Em, Dm) система повернута относительно магнитно-навигационной на угол, равный УМС по оси, указывающей на восток. Магнитная игла находится на плоскости Nm-Em.
Фиг.3 показывает взаиморасположение систем координат, где ϕ - угол крена, θ - угол наклона, ψ - азимут, γ - угол деклинации, λ - УМС. Системы уравнений, связывающие величины в разных системах отсчета, выглядят следующим образом:
Выходные сигналы магнитных датчиков следует нормировать перед применением алгоритма. Сначала нужно повернуть на 360 градусов компас вокруг перпендикуляра к поверхности Земли для определения максимума и минимума измеренной величины. Нормирование производится при определенном УМС по следующим формулам:



Выходной сигнал датчика в магнитной системе координат нормируется, используя соотношение (6) в любой местности как:




где Х - координатная ось;
Xmc - измеренная величина (выходной сигнал датчика);
 - нормированная величина;
- нормированная величина;
Xmax и Xmin - измеренные максимальное и минимальное значение измеренной величины.
SGN - напряжение смещения х-датчика;
SFx - масштабирующий множитель.
Важно знать информацию о Z-координате, если используется 2-осный компас. При нормированых показаниях  может быть записано как:
может быть записано как:

Знак перед корнем не может быть определен с помощью рассматриваемой конфигурации компаса. Это есть ограничение предложенной идеи. Ниже приведем группу уравнений, которые помогут преодолеть это ограничение.
Принимая во внимание, что выходной сигнал датчика нормирован, используются соотношения (2) и (4), в которых подразумевается, что УМС известен. Тогда информация о z-координате дополняется формулой:

Отношение между физическим фреймом и магнитным может быть записано так:

Умножим обе части уравнения матриц на обратную  :
:

Подставляя (2) и (5) в (13), имеем:
где 
1-ый вектор из матричного уравнения (14) может быть разложен следующим образом:

После нормирования это уравнение может быть записано так:

Поскольку в (17) не содержится информации об азимуте, z-координата может быть определена из соотношения (11). Исходя из этого, мы можем определить z-координату, если УМС и крен компаса известны, и в отличие от (10) избавляемся от необходимости определения знака выражения. Информация о крене может быть вычислена с помощью акселерометра. Используя двухосный акселерометр, можно рассчитать углы крена компаса:

где ax и ay - выходные сигналы акселерометра;
g - ускорение свободного падения.

В соотношении (17) предполагается, что укол крена меньше 180 градусов. Описанная ниже теорема показывает, что двухосный компас может вычислять азимут точно даже тогда, когда угол крена не равен нулю.
Определим значение третьей координаты, используя соотношения (13). Если предположить, что УМС и крен известны, тогда формула вычисления магнитного азимута выглядит следующим образом:

Для доказательства вышеописанных соотношений два вектора матрицы из (13) могут быть представлены в виде равенства:
Уравнение (19) может быть преобразовано для нахождения x1 и y1:




Заметим, что а и b эквивалентны Xh и -Yh соответственно в (1) из (19), x1 и y1 могут быть получены:

После нормирования (23) может быть записано как:

Однако информация об азимуте, доопределенная в (24), содержит погрешность из-за угла магнитного склонения (деклинации), который может быть скомпенсирован. Во-первых, угол деклинации известен для любой точки в мире и зависит от широты и долготы. Во-вторых, угол наклона и различные угловые ошибки могут быть компенсированы, используя выравнивающий фильтр, функционирующий в движении. Следовательно, азимут может быть вычислен.
УМС изменяется в зависимости от широты. Обычно УМС определяется, используя широту:

где L - широта.
Измеренное значение УМС отличается от реального вследствие влияния магнитного поля компаса. Приведенные ниже выражения позволяют оценить УМС, искаженный внешними магнитными явлениями, называемыми девиацией магнитного поля, и соответственно устранить девиацию магнитного поля в рабочем режиме.
Из вышесказанного следует, что если углы крена и наклона не равны нулю и азимут известен, то расширенный УМС (РУМС) определяется так:

где


Для доказательства (26-28) подставим (10) в (18):

где λe - РУМС.
Нормирование не может быть выполнено, если РУМС неизвестно. Во время нормирования, поворачивая компас в горизонтальной плоскости, (5) может быть записано:

Подставляя (30) в (29), получаем:

где


Уравнение (31) может быть преобразовано к виду:

Следовательно, РУМС может быть вычислен, используя (32) и (33):

Заметим, что в выражении (34) имеется две сложности. Во-первых, знаменатель равен нулю, если углы крена равны нулю. Во-вторых, необходима информация об азимуте. Обе сложности разрешаются следующим образом: двухосный магнитный компас может вычислять азимут точно на горизонтальной поверхности после нормирования при неизвестном УМС. Далее магнитный компас поворачивается по направлению к оси x или y для определенного значения азимута во избежание вырожденности. Следовательно, РУМС может быть вычислен с помощью формулы (26).
Если РУМС вычислен посредством формулы (26), углы крена должны быть ненулевыми. Алгоритм вычисления РУМС эффективен при угле крена более 30 градусов. Вычисленный РУМС имеет маленькую погрешность порядка 0,05 градуса.
Оценка РУМС выполнялась посредством крена компаса в течение нормирования. Правильность алгоритма проанализирована в ходе нескольких экспериментов. Они подтвердили, что предложенный алгоритм по нахождению РУМС является точным и простым. К тому же азимут рассчитывается без погрешности от угла крена. Предложенная технология может быть полезна в малогабаритных комплексных навигационных системах, встраиваемых в портативные устройства, такие как мобильный телефон, навигатор, коммуникатор и др.
Текущие пространственные координаты объекта при совместной (комплексной) обработке находятся в соответствии с фиг.5:

Суммируя приращения пространственных координат в течение одного цикла измерений, получают значения текущих координат объекта:

Среднеквадратическая погрешность SA координат, рассчитанных без СРНС, линейно увеличивается на каждом шаге вычислений

где δS - ожидаемая ошибка приращений пространственных координат на одном шаге вычислений.
При этом оценочное значение среднеквадратической ошибки увеличивается в соответствии с (24). При получении координат XR и YR от СРНС рассчитанные ранее относительные координаты ΔXT, ΔYT и координаты  ,
,  начальной точки уточняются в соответствии с формулами:
начальной точки уточняются в соответствии с формулами:
Элементы K1 и K2 матрицы усиления вычисляются следующим образом:
где Pij - элементы корреляционной матрицы ошибок экстраполяции Р. Эта матрица обновляется в каждом цикле обработки результатов наблюдения (при получении координат XR, YR от СРНС) в соответствии с формулой:

Дисперсия DA приращений автономных координат в период между последними двумя посылками СРНС определяется как  , после чего величина SA обнуляется. Для вычислений по формуле (28) необходимо задать матрицу Р в начальный момент времени. Начальное значение Р=Р0 определяется величиной дисперсии D0 координат начальной точки в момент старта:
, после чего величина SA обнуляется. Для вычислений по формуле (28) необходимо задать матрицу Р в начальный момент времени. Начальное значение Р=Р0 определяется величиной дисперсии D0 координат начальной точки в момент старта:

Эта дисперсия зависит от условий начала движения.
Описанный навигационный алгоритм обеспечивает определение текущих значений крена, тангажа, путевого угла, пространственных координат местоположения относительно эллипсоида WGS-84, высоты и глубины относительно геоида, горизонтальных и вертикальных составляющих путевой скорости, а также обеспечивает надежную работу системы как при наличии, так и в отсутствие СРНС-посылок.
Если сигналов от СРНС не поступает, координаты рассчитываются без СРНС с соответствующим постепенным накоплением ошибок. При поступлении радионавигационной информации даже после длительного периода работы в автономном режиме, как следует из (13)-(15), происходит довольно быстрое уточнение координат и уменьшение их среднеквадратической погрешности. При дальнейшей совместной работе автономная аппаратура фактически осуществляет сглаживание в динамическом режиме координат от СРНС, тем самым делая их более точными. Отдельные заведомо ложные грубые скачки СРНС-координат в таком режиме могут быть просто отброшены. Собственная же ошибка автономных систем в этом случае (за время нескольких циклов) является совсем незначительной.
Как уже отмечалось, погрешности определения координат при длительной работе аппаратуры в автономном режиме во многом зависят от выбора правильных значений путевого множителя KS и поправки направления Δα, Дополнительная информация от приемника СРНС позволяет проводить непрерывную коррекцию этих параметров во время движения. Для этого формируются два массива одинаковой фиксированной длины, в которых хранятся результаты выборочных 10-20 последних измерений координат приемником СРНС и автономной аппаратурой. Выборка требуется для того, чтобы длина участка, на котором производится сравнение координат, значительно превышала ошибку измерений СРНС. Запись очередных точек в эти массивы производится одновременно при условии, что нет резкого скачка координат от приемника СРНС, и расстояние до предыдущей точки (по автономным вычислениям) составляет не менее одного метра. Перед записью очередной точки производится сравнение приращений координат от начальной до конечной точки обоих массивов. Обозначим LR и LA - расстояние в метрах между первой и последней точками соответственно для СРНС и автономных массивов. Если разность этих расстояний по абсолютной величине не превосходит ожидаемой допустимой ошибки и LA>(100÷200) м, производится плавная коррекция параметров KS и Δα по формулам:


где δα - угол в градусах между направлениями от первой до последней точки соответственно для СРНС и автономных массивов;
QS и Qα - параметры фильтрации, определяемые опытным путем.
Рассмотрим алгоритм автоматического устранения девиации, заключающийся в следующем.
При равномерном прямолинейном движении в направлениях с магнитным азимутом αm, лежащим вблизи значений: 0°, 100°, 180°, 270°, с точностью ±30° производится запоминание усредненных значений HB для каждого из направлений в переменных HB[i], где i=1, 2, 3, 4. Для того чтобы минимизировать возможное влияние внешних источников магнитных помех, вычисления проводятся только во время движения с достаточно высокой скоростью. Фиксируется также количество циклов усреднения для каждого направления. В момент времени, когда число циклов усреднения для каждого из четырех направлений превысит заданную минимальную величину, происходит вычисление смещений нулей и масштабных множителей цифровых датчиков магнитного поля по формулам:
Процедура вычисления скорости по данным продольного ускорения выполняется в вычислительном модуле 11, в качестве численного метода интегрирования используется метод Симпсона, с оценкой точности:
Собственное значение определенного интеграла (45) находится методом Симпсона (парабол), алгоритм которого представлен на фиг.6, где значения кажущихся ускорений движения (a, b, e): real;.

Отрезок [a,b] разбивается на n=2m частей x0=a, x1=a+h, …, xn=b с шагом h=(b-a)/n.
Вычисляются значения yi=F(xi) функции в точках xi и находится значение интеграла по формуле Симпсона:

где


Затем количество точек разбиения удваивается и производится оцет точности вычислений:

Если Rn>e, то количество точек разбиения удваивается. Значение суммы 2(y1+y2+…+y2m-1) сохраняются, поэтому для вычисления интеграла при удвоения количества точек разбиения требуется вычислять значения yi лишь в новых точках разбиения.
Рассмотрим векторную диаграмму перемещения маршрута подвижного объекта с использованием инерциальной и геомагнитной навигационных систем, с коррекцией по спутниковой навигационной системе, представленную на фиг.5, где обозначено:
- Ro - координаты исходной точки;
- RD - приращение автономных координат за один цикл измерений;
- RT - смещение координат относительно исходной точки;
- RC - текущие координаты объекта (результат вычислений при совместной обработке);
- RG - координаты, полученные от спутниковой навигационной системы;
- RS - координаты, не участвующие в расчетах координат объекта;
- SS - максимально допустимый коэффициент ошибки (если превышает, то вводится фильтрация).
В исходной точке Ro задается начальная привязка пространственных координат. В первом цикле приращений автономных пространственных координат фиксируются пространственные координаты, получаемые от трех навигационных систем. В этом пункте визуально демонстрируется точность работы комплексной системы. Во втором цикле, в результате воздействия экстремальных сил инерции, возникающих в процессе движения подвижного объекта (пробуксовка, резкое торможение, ускорение и т.д.), инерциальная система дает погрешности (которая может укладываться в допустимые пределы погрешности расчета). В этом случае наиболее точные результаты получаются от геомагнитной навигационной системы. Третий цикл демонстрирует адекватную работу комплексной системы с хорошими точностными характеристиками. В четвертом цикле система фиксирует зону аномалий (геомагнитной, электромагнитной и т.д.), где геомагнитная система дает ошибку, выходящую за пределы допуска, и координаты в автономном режиме оцениваются по инерциальной навигационной системе. При сбое или отказе одной из систем функциональная надежность обеспечивается другой навигационной системой. Таким образом, обеспечивается параметрическая надежность предложенной навигационной системы.
Все вышеупомянутое позволяет обеспечивать повышенную точность, оперативность и достоверность определения пространственных координат объекта в сравнении с прототипом.
Это достигается тем, что:
1. Определение относительных пространственных координат проводится на основе комплексной обработки информации с учетом ее достоверности. При этом, с одной стороны, обеспечивается учет систематических погрешностей автономной навигационной системы, с другой стороны - геомагнитная автономная система позволяет скомпенсировать погрешности инерциальной навигационной системы, так как датчики магнитного поля не реагируют на инерционные составляющие движения подвижного объекта и не зависят от времени.
2. Обеспечивается постоянная работа устройства, не требующая необходимости проведения отдельного калибровочного цикла, это достигается за счет программной установки порога амплитуды тревоги; в частном случае превышения которых вектор состояния априорно известной динамической системы дооценивается рекурсивным фильтром Калмана, используя ряд неполных и зашумленных измерений.
3. Введенный цифровой блок хранения времени 6 производит синхронизацию секундной метки времени, полученной от приемника СРНС 8, и в автономном режиме обеспечивает временную стабильность системы, что повышает точность расчета пути и определения пространственных координат. В качестве блока хранения времени можно использовать, например, прецизионный кварцевый генератор с двойным термостатированием.
Кроме повышения точности, следует отметить более высокую параметрическую и функциональную надежность и устойчивость работы предлагаемой комплексной навигационной системы, особенно в условиях воздействия помех, в районах магнитных аномалий, в зонах неустойчивого приема сигналов СРНС и т.п. Использование в качестве приемника СРНС высокочувствительного спутникового приемника GPS/Глонасс/Galileo/Compas 8 обеспечивает автоматическую начальную привязку начальной точки.
Использование модема обеспечивает функции мониторинга, функции коррекции навигационной информации по базовым станциям или с помощью других ближайших абонентов, а также позволяет обеспечить обновление навигационного алгоритма и электронных карт.
Все вышеперечисленное позволяет обеспечивать решение задач, на которые направлено заявляемое изобретение.
Из вышесказанного следует, что использование в предлагаемом способе комплексной обработки информации с помощью геомагнитной и инерциальной навигационных систем позволяет обнаруживать и исключать ошибки приемника СРНС, а также выполняет функцию фильтра, резко уменьшающего случайные некоррелированные между собой ошибки отдельных измерений, в том числе вызванные кратковременным воздействием паразитных внешних магнитных полей, и дает возможность автоматически корректировать настраиваемые параметры комплексной навигационной системы - поправку направления DAp, коэффициент пути Ks и магнитное склонение ±λ. При совместной обработке информации недостатки обеих систем взаимно компенсируются, и работа комплекса является более устойчивой по отношению к внешним воздействиям.
Кроме того, заявляемая комплексная навигационная система может работать самостоятельно при невозможности приема сигналов СРНС и не только определять пространственные координаты объекта, на котором она установлена, но и передавать эту информацию, используя доступные средства связи, такие как сотовая подвижная связь и Интернет.
Так, например, человеку, находящемуся в чрезвычайной ситуации, недостаточно точно определить свое местоположение, необходимо также передать эту информацию в службу спасения, сотрудники которой могли бы оперативно организовать и оказать помощь.
Цифровые датчики гироскопов могут быть реализованы, например, на микросхеме типа L3G4200D фирмы STMicroelectronics.
Цифровые датчики магнитного поля могут быть реализованы, например, на микросхеме типа НМС6343 фирмы Honeywell.
Цифровой датчик абсолютного давления может быть реализован, например, на базе полупроводникового интегрального датчика MPL115A1 фирмы Freescale Semiconductor.
Цифровой блок счисления пути может быть реализован на контроллерах серии МК с возможностью подключения одометрической системы счисления пути, доплеровской или другой системы счисления пути.
Вычислительный модуль, работающий в соответствии с вышеописанным навигационным алгоритмом, может быть реализован, например, на вычислительном модуле Vortex86 VDX-6318-512 фирмы ICOP Technology Inc.
Источники информации
1. Патент РФ №2221991 "Способ определения местоположения подвижных наземных объектов и устройство для его реализации", 2004 г.
2. Патент РФ №2082098 "Способ комплексирования инерциальных навигационных систем и комплексированная навигационная система", 2007 г.
3. Патент РФ №2098764 "Способ определения местоположения подвижных объектов и устройство для его реализации", 1997 г.
4. Патент РФ №2334198 "Способ инерциальной навигации и устройство для его осуществления", 2008 г.
5. Патент РФ №2202102 "Способ определения местоположения подвижных объектов и устройство для его реализации", 2003 г.
6. Патент РФ №2395061 "Способ определения местоположения подвижных объектов и комплектированная навигационная система для его реализации", 2009 г.
7. Свидетельство о государственной регистрации программы для ЭВМ №2009613930 «Абонентский навигационный сервис", 2009 г.
8. А.Шумков. «Применение датчиков давления в системах навигации", Chip News, стр.91, 2004 г.
9. К.Браммер; Г.Зиффлинг. "Фильтр Калмана-Бьюси". - М.: Наука, 1982 г.
10. Аоки М. Оптимизация стохастических систем. / М.Аоки. - М.: Наука.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
| СПОСОБ КОНТРОЛЯ МАРШРУТОВ СЛЕДОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2194250C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2010 |
|
RU2436045C1 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2098764C1 |
| СПОСОБ СЪЕМКИ ГЕОМАГНИТНОГО ПОЛЯ НА АКВАТОРИИ БУКСИРУЕМЫМ МАГНИТОМЕТРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2587111C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2202102C2 |
| Способ автономной ориентации объектов в околоземном пространстве | 2022 |
|
RU2787971C1 |
Изобретение относится к области навигации и может быть использовано в зонах отсутствия или неустойчивого приема сигналов спутниковых радионавигационных систем: под водой, под землей, в горных массивах, в зданиях, в тоннелях, в метро, при облачной погоде и т.д. Технический результат - высокоточное определение пространственных координат с возможностью мониторинга. Для достижения данного результата измеряют контрольные значения абсолютного давления, контрольные значения проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта, проекции ускорения силы тяжести, проекции векторов угловой скорости на ортогональные оси навигационной системы координат. На основе полученных значений производят коррекцию и фильтрацию пространственных координат подвижного объекта. Для реализации способа система содержит цифровые блоки датчиков линейного ускорения (1), магнитного поля (2), гироскопов (3), абсолютного давления (4), температуры (5), счисления пути (6), хранения времени (7), приемник спутниковых радионавигационных систем (8), сенсорный дисплей (9), модем (10), вычислительный модуль (11). 2 н. и 10 з.п. ф-лы, 6 ил.
1. Способ определения пространственных координат подвижных объектов, заключающийся в том, что проводят первичную комплексную обработку информации, при которой измеряют контрольные значения абсолютного давления, контрольные значения проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта, проекции ускорения силы тяжести, проекции векторов угловой скорости на ортогональные оси навигационной системы координат, по значениям которых проводят вторичную комплексную обработку информации, при которой производят коррекцию и фильтрацию полученных значений, и с учетом, по меньшей мере, угловых и путевых поправок определяют параметры угловой ориентации и параметры пространственного движения с учетом пространственных координат начальной точки, определяют приращения пространственных координат, по которым производят определение относительных пространственных координат суммированием приращений пространственных координат, и определяют текущие значения пространственных координат суммированием относительных пространственных координат и пространственных координат начальной точки, полученные навигационные данные и траекторию маршрута сохраняют, при этом процессы и функции, выполняемые вышеописанным навигационным алгоритмом, синхронизируют со шкалой эталона времени.
2. Способ по п.1, в котором при первичной комплексной обработке информации, учитывая изменение времени, плотности и температуры окружающей среды, осуществляют преобразование и обработку сигналов навигационных измерителей с целью определения соответствующих навигационных параметров, затем при вторичной комплексной обработке информации осуществляют программную установку порогов амплитуды тревоги, при превышении которых векторы состояния априорно известной динамической системы дооценивают с помощью рекурсивного фильтра Калмана, используя ряд неполных и зашумленных измерений.
3. Способ по п.1, в котором значения угловых и путевых поправок определяют по результатам контрольного хода на участке, пространственные координаты начальной и конечной точек которого известны.
4. Способ по п.1, в котором определение Z-координаты без спутниковых радионавигационных систем (СРНС) осуществляют путем измерения абсолютного давления, пересчитывая Z-координату из проекции пройденного расстояния от начальной точки с учетом угловых и путевых поправок, либо с помощью электронной векторной карты по двум координатам (X, Y).
5. Способ по п.1, в котором магнитное склонение для данной местности определяют, используя магнитные карты повышенной точности, учитывающие специфику магнитной ситуации.
6. Способ по п.1, в котором по запросу передают на web-сервер через Интернет; осуществляют обмен пространственными координатами между абонентами, предпочтительно по протоколу TCP/IP.
7. Способ по п.1, в котором при возможности производят коррекцию навигационной информации по СРНС.
8. Способ по п.1, в котором при отсутствии сигналов СРНС проводят коррекцию навигационной информации по базовым станциям, либо с помощью других ближайших абонентов, пространственные координаты которых известны.
9. Способ по п.1, в котором осуществляют обновление навигационного алгоритма и электронных карт при помощи электронных носителей или через Интернет.
10. Комплексная навигационная система для определения пространственных координат подвижных объектов, содержащая вычислительный модуль, первая группа входов-выходов которого двунаправленной шиной соединена с группой входов-выходов цифрового блока датчиков линейного ускорения, вторая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов датчиков магнитного поля, третья группа входов-выходов двунаправленной шиной соединена с группой входов-выходов цифрового блока датчиков гироскопов, четвертая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов цифрового датчика абсолютного давления, пятая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов цифрового датчика температуры, шестая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов цифрового блока счисления пути, седьмая группа входов-выходов двунаправленной шиной соединена с первой группой входов-выходов цифрового блока хранения времени, девятая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов сенсорного дисплея, десятая группа входов-выходов двунаправленной шиной соединена с группой входов-выходов модема, восьмая группа входов-выходов двунаправленной шиной соединена с первой группой входов-выходов приемника спутниковых радионавигационных систем (СРНС), вторая группа входов-выходов которого двунаправленной шиной соединена со второй группой входов-выходов цифрового блока хранения времени.
11. Система по п.10, в которой вычислительный модуль выполнен с возможностью определения без СРНС текущих значений крена, тангажа, путевого угла, пространственных координат местоположения относительно эллипсоида WGS-84, высоты и глубины относительно геоида, горизонтальных и вертикальных составляющих путевой скорости.
12. Система по п.10, в которой модем выполнен с возможностью коррекции навигационной информации по базовым станциям или с помощью других ближайших абонентов с известными координатами, обеспечения функции мониторинга, а также обновления навигационного алгоритма и электронных карт.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2202102C2 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| US 5237952 А, 24.08.1993 | |||
| БАБИЧ О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.6-8. | |||

