Изобретение относится к области ракетной техники, а именно к устройствам управления аэродинамическими поверхностями ракеты. Данное устройство может быть применено в аналогичных по условиям работы агрегатах в машиностроении.
Известны устройства блока рулевого привода ракет, представляющие собой аэродинамические поверхности, устанавливаемые с возможностью поворота в корпус ракеты, а также радиально-упорные подшипники с перекрещивающимися осями и радиально-упорные подшипники. Например:
1. Патент 2629513 RU С2, F42B 10/62, 2015 г. Блок рулевого привода ракеты. Ивашин А.Ф., Вороньжев Д.Ю.
2. Авторское свидетельство 1286845 SU, F16C 19/34, 1984 г. Радиально-упорный роликоподшипник с перекрещивающимися роликами. Кринецкий В.Ю.
3. Патент 2391572 RU С2, F16C 19/22, F16C 19/34, F16C 33/34, 2008 г. Подшипник качения радиально-упорный с коническими роликами бессепараторный. Гонченко Б.В., Махмутов И.А.
4. US Patent 5961221, F16C 19/50, F16C 19/40; F16C 33/60, 1999. Crossed roller bearing and Coriolis gear device. Ichirou Kamimura.
5. US Patent 4479683, F16C 19/30, 1984. Crossed roller bearing. Takayoshi Kanamaru.
6. US Patent 4915513, F16C 19/50, F16C 19/40; Crossed tapered roller bearing and application thereof ina hub for an automobile, 1990. Michel A. Orain.
Наиболее близким по набору существенных признаков является техническое решение по патенту 2546792 RU С2, F42B 10/62, 2013 г., которое и было принято авторами за ближайший аналог.
Указанное техническое решение относится к устройствам управления аэродинамическими поверхностями сверхзвуковой ракеты. Оно представляет собой блок рулевого привода, состоящий из вала, установленного в корпус ракеты с возможностью поворота, аэродинамической поверхности, жестко закрепленной на валу, колец, жестко скрепляемых между собой и устанавливаемых в корпус ракеты, а также цилиндрических роликов и сепараторов. В кольцевой полости, образованной канавкой на валу и коническими дорожками качения на кольцах, размещены ролики так, что каждый последующий ролик перпендикулярен предыдущему. Между роликами установлен сепаратор.
Недостатками указанного технического решения являются:
- во-первых, проскальзывание боковой поверхности цилиндрических роликов по поверхностям дорожек качения вследствие того, что боковая цилиндрическая поверхность ролика катится по конической дорожке качения и ролики при вращении удерживаются в требуемом положении сепараторами, в противном случае цилиндрические ролики при качении смещаются, что может привести к заклиниванию роликов;
- во-вторых, скольжение торцевых поверхностей роликов по противоположным дорожкам качения.
Указанные недостатки увеличивают потери на трение в ряду роликов при вращении под воздействием значительных нагрузок на аэродинамическую поверхность.
Техническим результатом предлагаемого изобретения является снижение потерь на трение в ряду роликов, достигаемое исключением проскальзывания боковой поверхности ролика, а также преобразованием трения скольжения в трение качения на торцах роликов.
Указанный технический результат достигается следующим образом: создан блок рулевого привода ракеты, состоящий из аэродинамической поверхности, установленного в корпусе ракеты механизма поворота аэродинамической поверхности. Механизм поворота аэродинамической поверхности выполнен в виде вала с конической канавкой, шарнирно соединенного с двумя жестко скрепленными между собой и установленными на корпусе кольцами с коническими дорожками качения, образующими с канавкой на валу кольцевую полость; при этом один конец вала жестко соединен с аэродинамической поверхностью, а другой содержит рычаг, шарнирно соединенным с рулевым агрегатом, закрепленным в корпусе ракеты. Внутри кольцевой полости расположены равномерно по окружности конические ролики таким образом, что каждый последующий ролик расположен перпендикулярно предыдущему, а между опорными элементами установлен сепаратор. Ролик представляет собой усеченный конус, на торце большего диаметра которого установлен при помощи оси с возможностью вращения барабан с равномерно размещенными в нем шариками. Шарики взаимодействуют с торцевой поверхностью ролика и с коническими дорожками качения, при этом боковая поверхность ролика взаимодействует с одной стороны с коническими дорожками качения на одном из колец, а с другой с канавкой вала.
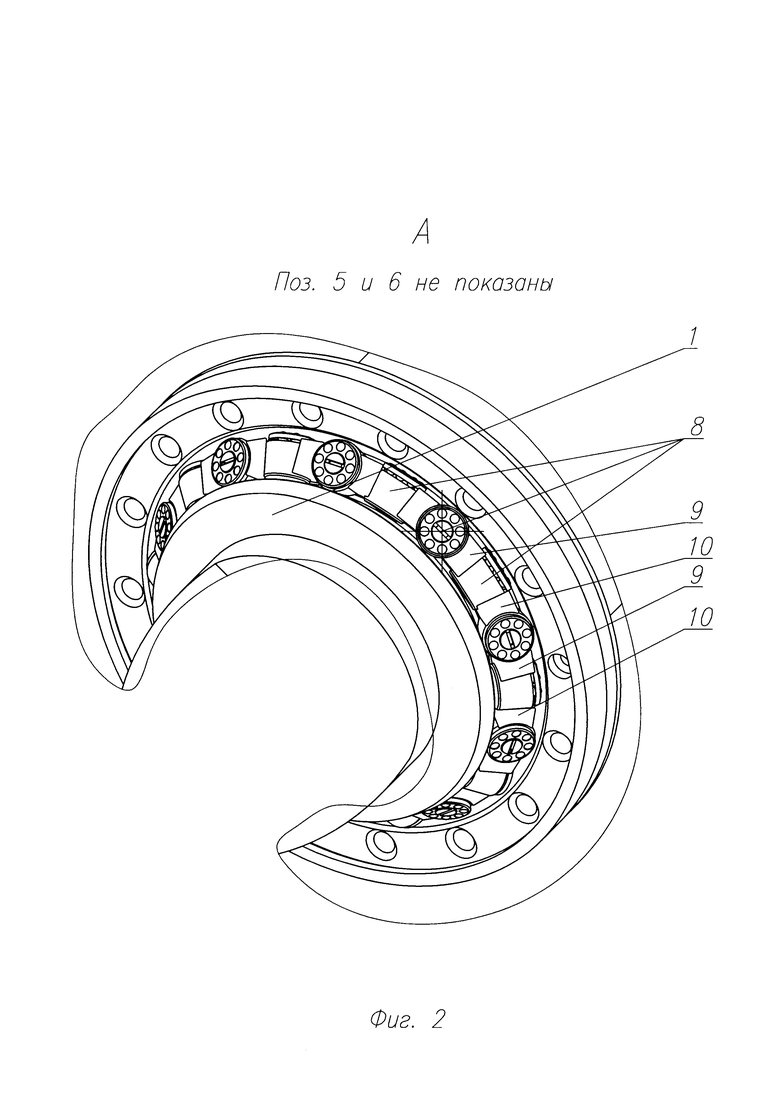
На фиг. 1, 2, 3, 4 представлена конструкция предлагаемого блока рулевого привода ракеты.
На валу 1 установлена аэродинамическая поверхность 2, вал 1 шарнирно соединен со штоком рулевого агрегата 3. Вал 1 может вращаться относительно колец 4 и 5, которые соединены между собой, установлены в корпус ракеты. Кольца центрируются друг относительно друга классным болтом 6 и буртиком 7. Шток 11 рулевого агрегата 3 шарнирно соединен с рычагом 12 осью 13. Ролики 8 и сепараторы 9, 10 размещены в кольцевой полости, образованной канавкой 14 на валу 1 и коническими дорожками качения 15 и 16. Ось каждого последующего ролика перпендикулярна оси предыдущего. Между роликами располагаются сепараторы.
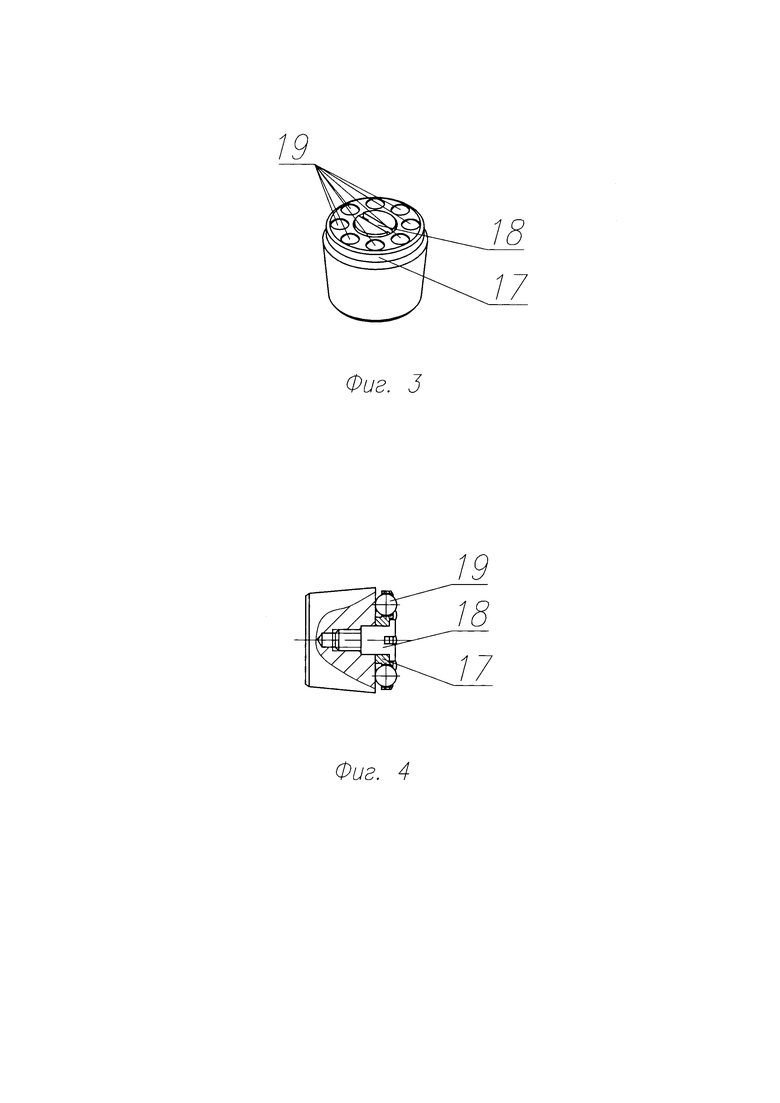
Ролик имеет форму усеченного конуса. На торце большего диаметра установлен барабан 17 на оси 18, в котором размещены шарики 19. Барабан 17 имеет одну вращательную степень свободы относительно неподвижной оси 18, а шарики 19 удерживаются барабаном на торцевой поверхности ролика и могут перемещаться по ней при вращении барабана.
Поступательное движения штока 11 рулевого агрегата преобразуется во вращательное движение вала 1. Нагрузка от аэродинамической поверхности через вал воспринимает ряд роликов 8, каждый из которых перемещается по одной из конических поверхностей 15 или 16 на одном из неподвижных колец 4 и 5 и по противоположной конической поверхности канавки 14, выполненной на валу 1.
Применение конических роликов позволяет избежать проскальзывания боковой поверхности ролика по дорожке качения. Для этого угол раствора конической поверхности ролика должен быть таким, чтобы вершины конической поверхности ролика и дорожки качения совпадали, т.е. оси симметрии конических поверхностей пересекались. Однако при использовании роликов в форме усеченного конуса вследствие непараллельности образующей боковой поверхности ролика его оси вращения возникает составляющая от силы, воспринимаемой роликом, которая стремится выдавить ролик в направлении увеличения его диаметра. Эта сила прижимает торец ролика к противоположной дорожке качения, что приводит к появлению дополнительных потерь на трение скольжения. Чем больше угол раствора конической поверхности ролика, т.е. чем меньше диаметр размещения ряда роликов, тем больше будет указанная сила по отношению к воспринимаемому роликом усилию. Для исключения трения скольжения на торцах роликов введены шарики, удерживаемые в барабане.
Предложенное техническое решение позволяет снизить потери на трение в ряду роликов.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК РУЛЕВОГО ПРИВОДА РАКЕТЫ | 2013 |
|
RU2546792C2 |
| БЛОК РУЛЕВОГО ПРИВОДА РАКЕТЫ | 2015 |
|
RU2629513C2 |
| Блок рулевых приводов ракеты или снаряда | 2020 |
|
RU2740978C1 |
| ВЕЛОСИПЕД ДВУХКОЛЕСНЫЙ | 2018 |
|
RU2696749C1 |
| Механизм управления аэродинамическими поверхностями | 2021 |
|
RU2776628C1 |
| РЕДУКЦИОННЫЙ УПОРНЫЙ ПОДШИПНИК | 2015 |
|
RU2609545C1 |
| Способ изготовления компактного роликового подшипника | 1991 |
|
SU1831600A3 |
| МАГНИТОЖИДКОСТНЫЙ ПОДШИПНИК | 2024 |
|
RU2836704C1 |
| ВРАЩАЮЩИЙСЯ СТАБИЛИЗАТОР УПРАВЛЯЕМОЙ РАКЕТЫ | 2015 |
|
RU2601889C1 |
| Опорно-поворотное устройство | 2018 |
|
RU2683915C1 |

Изобретение относится к устройствам управления аэродинамическими поверхностями ракеты и может быть применено в аналогичных по условиям работы агрегатах в машиностроении. Блок рулевого привода ракеты состоит из аэродинамической поверхности, установленного в корпусе ракеты механизма поворота аэродинамической поверхности. Механизм поворота аэродинамической поверхности выполнен в виде вала с конической канавкой, шарнирно соединенного с двумя жестко скрепленными между собой и установленными на корпусе кольцами с коническими дорожками качения, образующими с канавкой на валу кольцевую полость. При этом один конец вала жестко соединен с аэродинамической поверхностью, а другой содержит рычаг, шарнирно соединенный с рулевым агрегатом, закрепленным в корпусе ракеты. Внутри кольцевой полости расположены равномерно по окружности конические ролики таким образом, что каждый последующий ролик расположен перпендикулярно предыдущему, а между опорными элементами установлен сепаратор. Ролик представляет собой усеченный конус, на торце большего диаметра которого установлен при помощи оси с возможностью вращения барабан с равномерно размещенными в нем шариками. Шарики взаимодействуют с торцевой поверхностью ролика и с коническими дорожками качения. Боковая поверхность ролика взаимодействует с одной стороны с коническими дорожками качения на одном из колец, а с другой - с канавкой вала. Технический результат заключается в снижении потерь на трение в ряду роликов. 4 ил.
Блок рулевого привода ракеты, состоящий из аэродинамической поверхности, установленного в корпусе ракеты механизма поворота аэродинамической поверхности, который выполнен в виде вала, шарнирно соединенного с двумя жестко скрепленными между собой и установленными на корпусе кольцами, на валу выполнена канавка, а на кольцах выполнены конические дорожки качения, образующие с канавкой кольцевую полость, при этом один конец вала жестко соединен с аэродинамической поверхностью, а другой содержит рычаг, шарнирно соединенный с рулевым агрегатом, закрепленным в корпусе ракеты, внутри кольцевой полости расположены равномерно по окружности ролики таким образом, что каждый последующий ролик расположен перпендикулярно предыдущему, а между опорными элементами установлен сепаратор, отличающийся тем, что ролик представляет собой усеченный конус, на торце большего диаметра которого установлен при помощи оси с возможностью вращения барабан с равномерно размещенными в нем шариками, взаимодействующими с торцевой поверхностью ролика и с коническими дорожками качения, при этом боковая поверхность ролика взаимодействует с одной стороны с коническими дорожками качения на одном из колец, а с другой - с канавкой вала.
| БЛОК РУЛЕВОГО ПРИВОДА РАКЕТЫ | 2013 |
|
RU2546792C2 |
| Многозаходная винтовая пара с трением качения | 1958 |
|
SU121323A1 |
| БЛОК РУЛЕВОГО ПРИВОДА РАКЕТЫ | 2015 |
|
RU2629513C2 |
| СПОСОБ ОБЕССОЛИВАНИЯ И ОБЕЗВОЖИВАНИЯ ВОДОНЕФТЯНОЙ ЭМУЛЬСИИ | 0 |
|
SU176026A1 |
| US 4915513 A, 10.04.1990 | |||
| US 2015275968 A1, 01.10.2015. | |||

