Изобретение относится к области ракетной техники, а именно к приводам управления аэродинамическими поверхностями, и может быть использовано, в том числе, в изделиях со сверхзвуковыми скоростями.
Актуальной проблемой развития блока рулевых приводов управления аэродинамическими поверхностями ракет или снарядов является увеличение скорости полета, что обуславливает повышение нагрузки на приводы и опорные устройства аэродинамических поверхностей.
Известен блок рулевых приводов с поступательным движением выходного звена исполнительного механизма привода (рулевого агрегата) (Патент RU 2546792 опубл. 10.04.2015, Бюл. №20)
Каждый исполнительный механизм расположен вдоль продольной оси блока и содержит шток, шарнирно соединенный с рычагом вала аэродинамической поверхности для преобразования поступательного движения штока во вращательное движение аэродинамической поверхности. При этом вал аэродинамической поверхности размещен в опорном устройстве, состоящем из двух рядов тел качения, расположенных в одной плоскости в двух сепараторах, что позволяет приводу работать при большой аэродинамической нагрузке.
Недостатком указанной конструкции является необходимость использования рычажного устройства, расположенного ниже тел качения, для преобразования поступательного движения штока во вращательное движение аэродинамической поверхности, которое занимает значительный дополнительный объем.
Известен блок рулевых приводов с вращательным движением выходного звена исполнительного механизма (Патент RU 2102282 опубл. 20.01.1998, Бюл. №2). Каждый исполнительный механизм этого блока рулевых приводов содержит электродвигатель, расположенный вдоль продольной оси блока, и набор механических передач, преобразующих вращательное движение вала двигателя во вращательное движение вала аэродинамической поверхности. В качестве выходной передачи использована зубчатая волновая передача, состоящая из волнообразователя, гибкого и жесткого колес. Жесткое колесо зубчатой волновой передачи является составной частью вала аэродинамической поверхности, а опорное устройство выполнено из подшипников, расположенных между наружной поверхностью жесткого колеса и корпусом блока. Кроме того, на наружной поверхности жесткого колеса имеется зубчатый венец, зубья которого взаимодействуют с зубчатым колесом, размещенным на подвижном звене датчика обратной связи.
Это устройство содержит наибольшее число общих признаков и принято авторами за прототип.
Недостатком указанной конструкции являются большие габариты, не позволяющие вписаться в небольшой диаметр блока, так как в зубчатой волновой передаче габариты определяет диаметр гибкого колеса, а он зависит от величины развиваемого момента и не зависит от передаточного числа, которое не может быть меньше 70. (Геращенко А.Н., Постников В.А., Самсонович С.Л. Пневматические, гидравлические и электрические приводы летательных аппаратов на основе волновых исполнительных механизмов. М. Изд-во МАИ-Принт, 2010 -548 с.)
Целью предлагаемого изобретения является создание блока рулевых приводов ракеты или снаряда небольшого калибра с большой аэродинамической нагрузкой.
Для достижения указанной цели в блоке рулевых приводов ракеты или снаряда небольшого калибра, состоящего из общего корпуса, четырех, исполнительных механизмов, каждый из которых включает электродвигатель, набор механических передач, датчик обратной связи и опорное устройство вала аэродинамической поверхности, жестко соединенного с валом выходного звена выходной механической передачи так, что общий корпус выполнен из двух частей: наружной и внутренней, соединенных перегородками, при этом наружная часть является составной частью корпуса ракеты или снаряда, а внутренняя часть имеет форму параллелепипеда с центральным продольным отверстием, а в исполнительных механизмах использованы высокоскоростные электродвигатели, энергетические параметры которых достигаются за счет длины, при которой наружные диаметры четырех двигателей вписываются во внутренний диаметр наружного общего корпуса, в состав механических передач входят передачи, соединенные в следующей последовательности от электродвигателя: планетарная, коническая, цилиндрическая и волновая с телами качения, выполненная по схеме с выходным жестким колесом, при этом передаточные числа механических передач распределены так, что передаточное число волновой передачи реализуется с наружным диаметром жесткого колеса, которое вписывается в сектор наружного корпуса с углом 90°, передаточное число планетарной передачи реализуется с наружным диаметром, не превышающим наружный диаметр электродвигателя, а остальные механические передачи дополняют общее передаточное число до требуемого значения, опорное устройство каждой аэродинамической поверхности образовано телами качения волновой передачи, расположенными в сепараторе внутри жесткого колеса, и двумя рядами тел качения, контактирующими с кольцевыми дорожками жесткого колеса, расположенными на его наружной поверхности по разные стороны зубчатого венца кинематической пары связи с датчиком обратной связи, и канавками, расположенными в перегородках корпуса, имеющих форму стаканов.
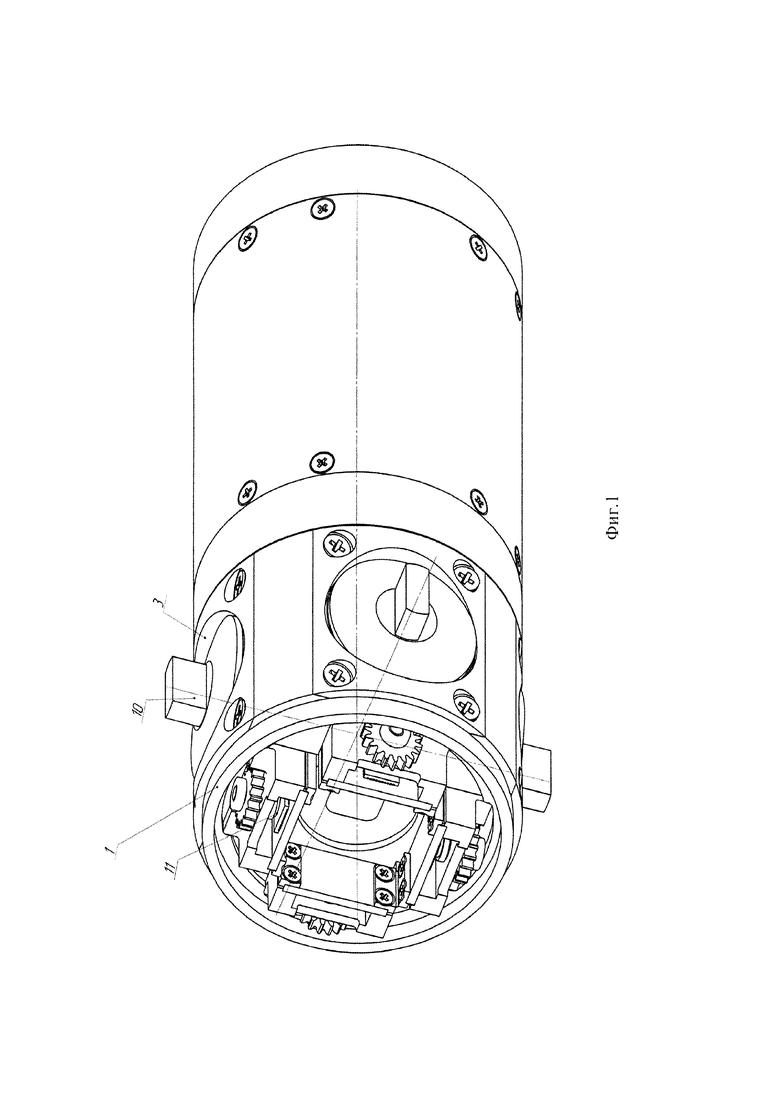
На фиг. 1 представлена конструкция блока рулевых приводов.
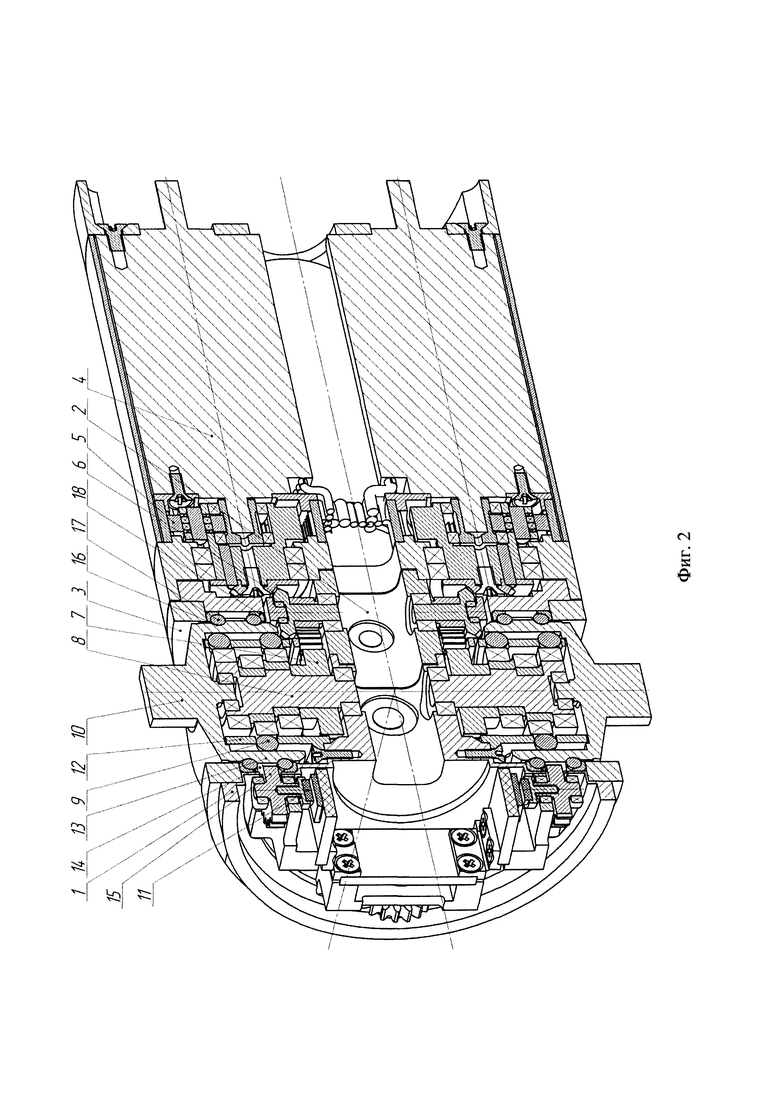
На фиг. 2 представлен продольный разрез блока рулевых приводов.
Блок рулевых приводов выполнен в виде общего корпуса, который состоит из двух частей: наружной 1 и внутренней 2, соединенных перегородками 3. Наружная часть 1 корпуса является составной частью корпуса ракеты или снаряда, а внутренняя часть 2 имеет форму параллелепипеда с центральным продольным отверстием. Между частями корпуса 1 и 2 размещены четыре исполнительных механизма, каждый из которых содержит электродвигатель 4, набор механических передач, состоящий из последовательно соединенных передач: планетарной 5, конической 6, цилиндрической 7 и выходной волновой передачи 8 с телами качения 9, опорного устройства вала 10 аэродинамической поверхности и датчика 11 обратной связи (датчика положения аэродинамической поверхности).
В качестве электродвигателей 4 использованы высокоскоростные электродвигатели, энергетические параметры которых достигнуты за счет длины при ограниченном наружном диаметре. Величина наружного диаметра электродвигателя 4 определена из условия, что наружный диаметр четырех электродвигателей вписывается во внутренний диаметр наружной части 1 корпуса.
Волновая передача 8 с телами качения 9, шариками или роликами (на фиг. 2 приведены шарики), выполнена по схеме с неподвижным сепаратором 12 и выходным жестким колесом 13, которое выполнено заодно с валом 10 аэродинамической поверхности. В такой схеме сепаратор 12, в гнездах которого размещены тела качения 9, расположен внутри жесткого колеса 13. При этом жесткое колесо 13 контактирует со всеми телами качения 9 и выполняет функцию, аналогичную наружной обойме радиального подшипника опорного устройства. Кроме того, на наружной поверхности жесткого колеса 13 имеется зубчатый венец 14, образующий кинематическую пару с зубчатым колесом 15, насаженным на подвижном звене датчика 11 обратной связи. На концах наружной поверхности жесткого колеса 13 выполнены канавки 16, в которых размещены тела качения 17, шарики или ролики (на фиг. 2 приведены шарики), контактирующие с кольцевыми дорожками 18, расположенными в перегородках 3 корпуса, имеющих форму стаканов.
В результате вал 10 аэродинамической поверхности с жестким колесом 13 опирается на тела качения 17 расположенные в канавках 16 на концах наружной поверхности жесткого колеса 13, и тела качения 9, расположенные внутри его в сепараторе 12, что увеличивает нагрузочную способность опорного устройства.
В наборе механических передач передаточные числа передач распределены так, чтобы получить требуемое передаточное число в габаритах, позволяющих вписаться в небольшой калибр наружной части 1 корпуса. Передаточное число волновой передачи 8 выбрано из условия, что величина наружного диаметра жесткого колеса 13, расположенного перпендикулярно оси аэродинамической поверхности, вписывается в сектор наружной части 1 корпуса с углом 90°. Передаточное число планетарной передачи 5 выбрано из условия, что ее наружный диаметр не превышает наружный диаметр электродвигателя 4. Передаточные числа цилиндрической 7 и конической 6 передач дополняют общее передаточное число до требуемого значения, а оси колес этих передач размещены в подшипниках, расположенных во внутренней части 2 корпуса.
Устройство работает следующим образом. При подаче сигнала управления на электродвигатель 4 одного из исполнительных механизмов блока рулевых приводов вал 10 аэродинамической поверхности повернется на заданный угол.
При отсутствии момента нагрузки вал 10 аэродинамической поверхности будет поворачиваться с максимальной скоростью, величина которой меньше скорости электродвигателя 4 в передаточное число раз. При наличии аэродинамической нагрузки исполнительный механизм развивает момент, превышающий момент электродвигателя 4 в передаточное число раз. При действии аэродинамической нагрузки перекос вала 10 аэродинамической поверхности исключают тела качения 9 и 17, расположенные внутри и снаружи жесткого колеса.
Таким образом, предложен блок рулевых приводов ракеты или снаряда, в исполнительных механизмах которых использованы электродвигатели с установленным соотношением габаритов и определенный набор механических передач, соединенных в указанной последовательности и компоновке, позволяющей обеспечивать управление ракетой или снарядом малого диаметра при высоких аэродинамических нагрузках.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм управления аэродинамическими поверхностями | 2021 |
|
RU2776628C1 |
| Блок рулевых приводов управляемого снаряда | 2024 |
|
RU2834610C1 |
| Электромеханический рулевой привод вращательного действия | 2018 |
|
RU2678385C1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1996 |
|
RU2102282C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РУЛЕВОГО ПРИВОДА | 2004 |
|
RU2265553C1 |
| СИЛОВОЙ МИНИ-ПРИВОД ПЕТЛЕОБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2519612C2 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 2008 |
|
RU2370412C1 |
| МЕХАНИЗМ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ РАКЕТОЙ | 2005 |
|
RU2316720C2 |
| Способ управления беспилотным летательным аппаратом и блок рулевых приводов для его осуществления | 2016 |
|
RU2634609C1 |
| Резервированный электромеханический привод | 2020 |
|
RU2736658C1 |
Изобретение относится к области ракетной техники, а именно к приводам управления аэродинамическими поверхностями ракет или снарядов. Блок рулевых приводов ракеты или снаряда состоит из общего корпуса, четырех исполнительных механизмов, каждый из которых включает электродвигатель, набор механических передач, датчик обратной связи и опорное устройство вала аэродинамической поверхности, жестко соединенного с валом выходного звена выходной механической передачи. Общий корпус выполнен из двух частей: наружной и внутренней, соединенных перегородками. Наружная часть является составной частью корпуса ракеты или снаряда, а внутренняя часть имеет форму параллелепипеда с центральным продольным отверстием. В исполнительных механизмах использованы высокоскоростные электродвигатели, энергетические параметры которых достигаются за счет длины, при которой наружные диаметры четырех двигателей вписываются во внутренний диаметр наружного общего корпуса. В состав механических передач входят передачи, соединенные в следующей последовательности от электродвигателя: планетарная, коническая, цилиндрическая и волновая с телами качения, выполненная по схеме с выходным жестким колесом. Передаточные числа механических передач распределены так, что передаточное число волновой передачи реализуется с наружным диаметром жесткого колеса, которое вписывается в сектор наружной части корпуса с углом 90°. Передаточное число планетарной передачи реализуется с наружным диаметром, не превышающим наружный диаметр электродвигателя, а остальные механические передачи дополняют общее передаточное число до требуемого значения. Опорное устройство каждой аэродинамической поверхности образовано телами качения волновой передачи, расположенными в сепараторе внутри жесткого колеса, и двумя рядами тел качения, контактирующими с канавками жесткого колеса, расположенными на его наружной поверхности по разные стороны зубчатого венца кинематической пары связи с датчиком обратной связи, и кольцевыми дорожками, расположенными в перегородках корпуса, имеющих форму стаканов. Изобретение позволяет обеспечить управление ракетой или снарядом малого диаметра при высоких аэродинамических нагрузках. 2 ил.
Блок рулевых приводов ракеты или снаряда, состоящий из общего корпуса, четырех исполнительных механизмов, каждый из которых включает электродвигатель, набор механических передач, датчик обратной связи и опорное устройство вала аэродинамической поверхности, жестко соединенного с валом выходного звена выходной механической передачи, отличающийся тем, что общий корпус выполнен из двух частей: наружной и внутренней, соединенных перегородками, при этом наружная часть является составной частью корпуса ракеты или снаряда, а внутренняя часть имеет форму параллелепипеда с центральным продольным отверстием, а в исполнительных механизмах использованы высокоскоростные электродвигатели, энергетические параметры которых достигаются за счет длины, при которой наружные диаметры четырех двигателей вписываются во внутренний диаметр наружного общего корпуса, в состав механических передач входят передачи, соединенные в следующей последовательности от электродвигателя: планетарная, коническая, цилиндрическая и волновая с телами качения, выполненная по схеме с выходным жестким колесом, при этом передаточные числа механических передач распределены так, что передаточное число волновой передачи реализуется с наружным диаметром жесткого колеса, которое вписывается в сектор наружной части корпуса с углом 90°, передаточное число планетарной передачи реализуется с наружным диаметром, не превышающим наружный диаметр электродвигателя, а остальные механические передачи дополняют общее передаточное число до требуемого значения, опорное устройство каждой аэродинамической поверхности образовано телами качения волновой передачи, расположенными в сепараторе внутри жесткого колеса, и двумя рядами тел качения, контактирующими с канавками жесткого колеса, расположенными на его наружной поверхности по разные стороны зубчатого венца кинематической пары связи с датчиком обратной связи, и кольцевыми дорожками, расположенными в перегородках корпуса, имеющих форму стаканов.
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1996 |
|
RU2102282C1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1999 |
|
RU2154593C1 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ БИАКТИВНОЙ ДИАТЕРМОКОАГУЛЯЦИИ | 0 |
|
SU173854A1 |
| US 5806791 A, 15.09.1998 | |||
| JP 2011075225 A, 14.04.2011 | |||
| US 5190503 A, 02.03.1993. | |||

