Изобретение относится к области летательных аппаратов (ЛА), а именно, к устройствам управления аэродинамическими поверхностями.
Уровень техники
Известен «Блок рулевых приводов» (см. патент RU 2740978 C1, F42B 10/62, опубликован 2021.01.22), выбранный в качестве прототипа.
Блок рулевых приводов ракеты или снаряда состоит из общего корпуса, четырех исполнительных механизмов, каждый из которых включает электродвигатель, набор механических передач, датчик обратной связи и опорное устройство вала аэродинамической поверхности, жестко соединенного с валом выходного звена выходной механической передачи.
В состав механических передач входят передачи, соединенные в следующей последовательности от электродвигателя: планетарная, коническая, цилиндрическая и волновая с телами качения, выполненная по схеме с выходным жестким колесом. Передаточные числа механических передач распределены так, что передаточное число волновой передачи реализуется с наружным диаметром жесткого колеса, которое вписывается в сектор наружной части корпуса с углом 90°. Передаточное число планетарной передачи реализуется с наружным диаметром, не превышающим наружный диаметр электродвигателя, а остальные механические передачи дополняют общее передаточное число до требуемого значения. Опорное устройство каждой аэродинамической поверхности образовано телами качения волновой передачи, расположенными в сепараторе внутри жесткого колеса, и двумя рядами тел качения, контактирующими с канавками жесткого колеса, расположенными на его наружной поверхности по разные стороны зубчатого венца кинематической пары связи с датчиком обратной связи, и кольцевыми дорожками, расположенными в перегородках корпуса, имеющих форму стаканов.
Недостатки прототипа:
- жесткое соединение вала аэродинамической поверхности с валом выходного звена механической передачи приводит к нагружению выходного вала привода аэродинамическими нагрузками, которые, как правило, во много раз превосходят усилия в передачах привода, возникающие при передаче крутящего момента. Это приводит к значительным деформациям в выходной ступени редуктора привода, которые могут нарушить работу передачи вплоть до заклинивания передачи и разрушения ее деталей;
- совмещение вала аэродинамической поверхности с валом выходного звена механической передачи создает компоновочные ограничения, а именно, сложность с размещением достаточно грузоподъемных подшипниковых опор вала аэродинамической поверхности, а также невозможность разместить датчик обратной связи непосредственно на валу аэродинамической поверхности;
- высокое потребное передаточное число редуктора привода, вследствие непосредственного привода вала аэродинамической поверхности и, как следствие, значительное количество ступеней редуктора, большой объем, масса и стоимость редуктора;
- постоянный располагаемый момент привода во всех угловых положениях аэродинамической поверхности, несмотря на то, что максимальный момент необходим только при значительных отклонениях поверхности от нейтрального положения.
Раскрытие сущности изобретения
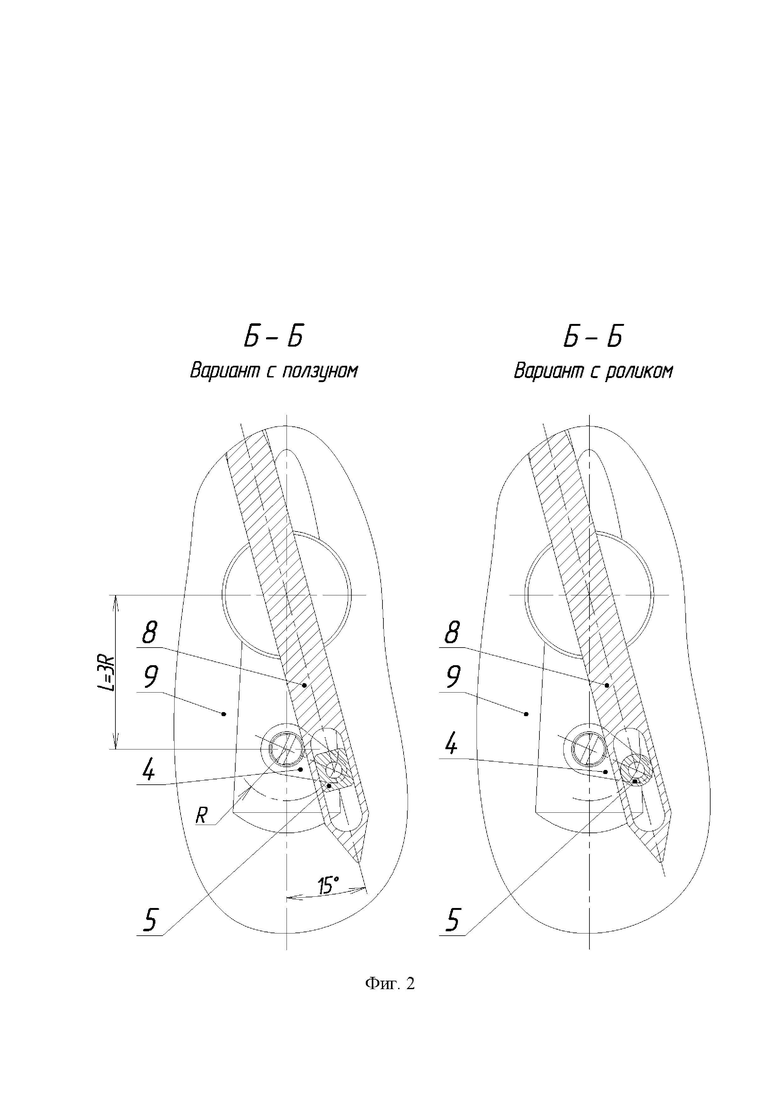
Технический результат, который устраняет указанные выше недостатки, заключается в использовании плоского кривошипно-кулисного механизма, в котором кулиса непосредственно совмещена с аэродинамической поверхностью, на торцевой поверхности которой выполнен паз для ползуна передачи, а кривошип установлен на выходном валу редуктора привода. Ползун может быть выполнен в виде ролика для замены трения скольжения трением качения, при этом поверхность паза должна обладать достаточной твердостью для восприятия контактного давления. Образующие ползуна и ролика являются дугами окружности, что обеспечивает компенсацию погрешностей изготовления и упругих деформаций. Кулиса может быть выполнена отдельно от аэродинамической поверхности и устанавливаться на валу поверхности внутри корпуса ЛА, если позволяют габариты. Привод разгружен от аэродинамических усилий, они воспринимаются подшипниками вала аэродинамической поверхности, а конструкция передачи обеспечивает компенсацию упругих деформаций аэродинамической поверхности, ее вала и подшипников.
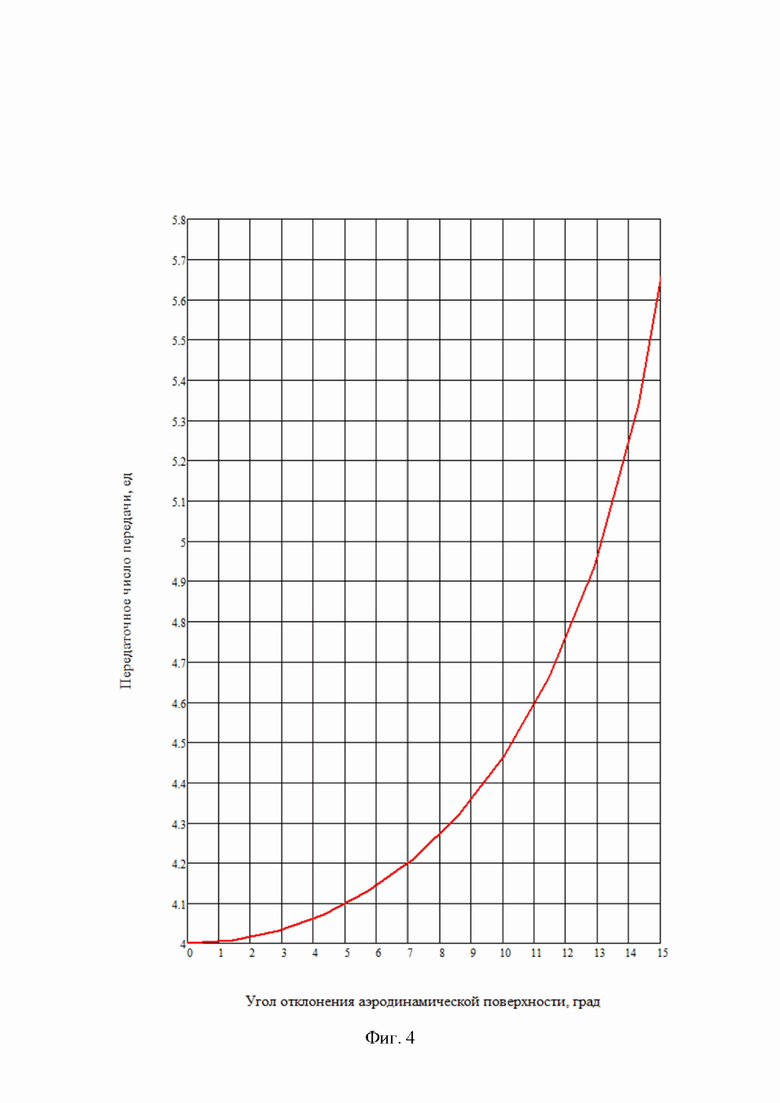
Передаточное число такой передачи является переменным, оно минимально в нейтральном положении поверхности и увеличивается при отклонении в любую сторону. Это позволяет увеличить скорость и собственную частоту привода вблизи нейтрального положения аэродинамической поверхности и обеспечивать значительный располагаемый шарнирный момент при больших углах отклонения поверхности.
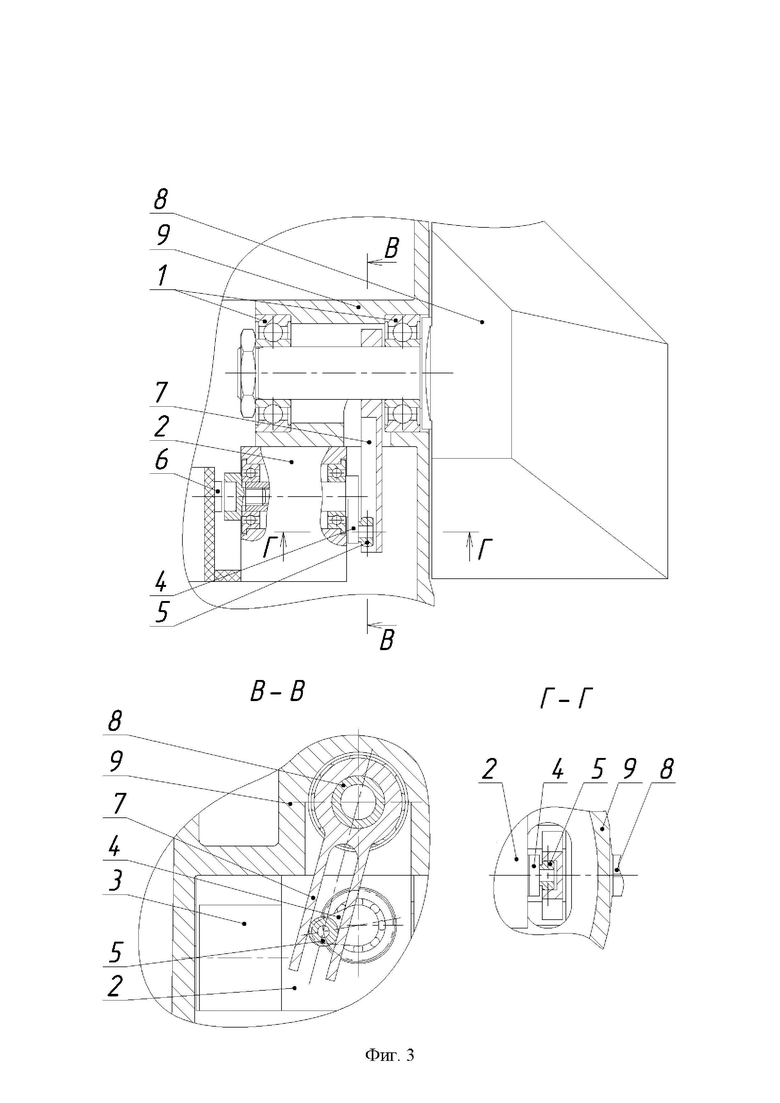
Наличие такой передачи, конструктивно объединенной с аэродинамической поверхностью, позволяет исключить из редуктора привода последнюю ступень, которая нагружена самым большим крутящим моментом, и, как следствие, имеет самые большие габариты и массу. При этом кривошипно-кулисная передача фактически находится вне габаритов ЛА и освобождает существенный объем внутри корпуса ЛА. Датчик обратной связи может быть расположен непосредственно на валу аэродинамической поверхности, либо на валу кривошипа.
Краткое описание чертежей
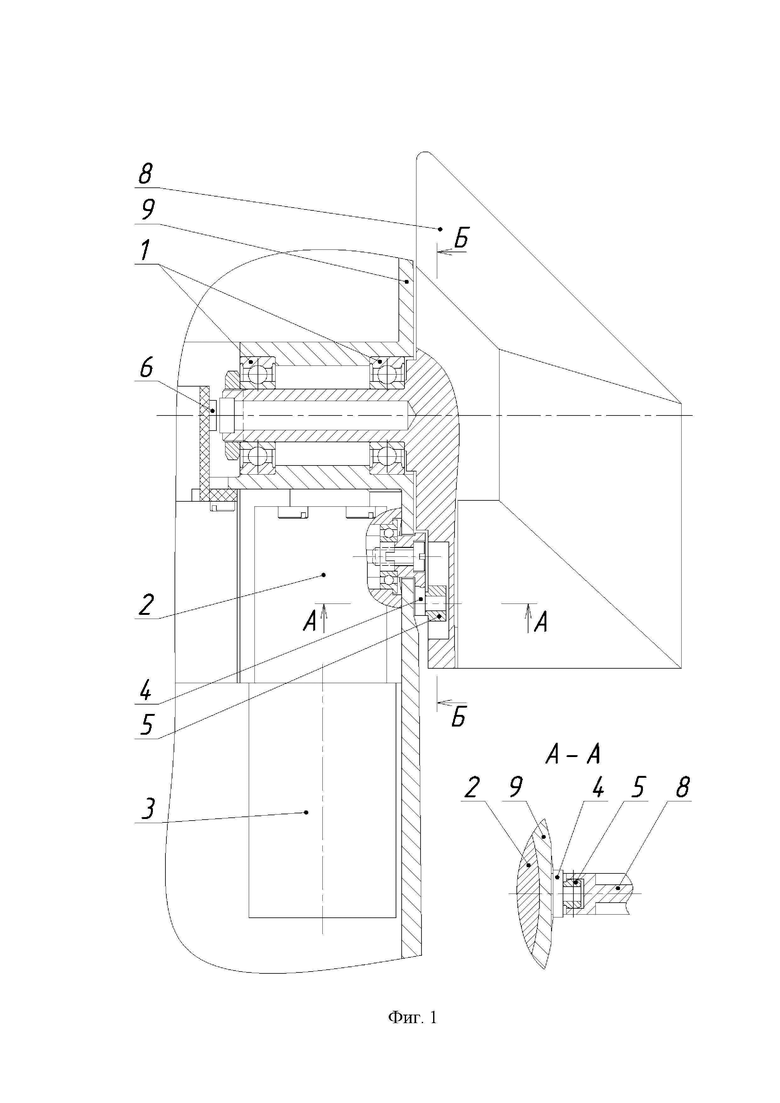
Изобретение иллюстрируется чертежами, где на Фиг. 1 показан разрез механизма управления по плоскости хорд аэродинамической поверхности, на Фиг. 2 показан разрез в плоскости кривошипно-кулисного механизма при максимальном угловом отклонении аэродинамической поверхности. На Фиг. 3 показан вариант с отдельно выполненной кулисой, установленной на валу аэродинамической поверхности внутри корпуса ЛА и датчиком обратной связи, установленном на валу кривошипа. На Фиг. 4 показан график передаточного числа кривошипно-кулисной передачи в зависимости от угла отклонения аэродинамической поверхности от нейтрального положения при указанных на Фиг. 2 параметрах кинематических звеньев передачи.
Механизм управления аэродинамическими поверхностями включает: подшипники 1, редуктор привода 2, электродвигатель 3, кривошип 4, ползун (ролик) 5, датчик обратной связи 6, кулису 7. Аэродинамическая поверхность 8 и корпус ЛА 9, не входят в состав механизма управления, однако их необходимо показать для иллюстрации устройства механизма.
Осуществление изобретения
Механизм работает следующим образом. При подаче управляющего сигнала на электродвигатель 3 выходной вал редуктора привода 2 поворачивает кривошип 4, на малой оси которого установлен ползун (ролик) 5, который давит на боковую поверхность паза аэродинамической поверхности 8, либо кулисы 7, и поворачивает ее до тех пор, пока датчик обратной связи 6 не покажет, что заданное положение достигнуто.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2137686C1 |
| Механический пресс | 1991 |
|
SU1816266A3 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438858C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243083C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В КУЛИСНОМ МЕХАНИЗМЕ И КУЛИСНЫЙ МЕХАНИЗМ ГОРБАНЯ-БРОДОВА | 1998 |
|
RU2133832C1 |
| Станок для правки и резки пруткового материала | 1976 |
|
SU763045A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2009 |
|
RU2412046C2 |
| Мобильное роботизированное устройство | 2023 |
|
RU2829775C2 |
| ДВИГАТЕЛЬНЫЙ ПРИВОД ТОКОРАЗЪЕДИНИТЕЛЯ | 2007 |
|
RU2337261C1 |
| Устройство для раскачивания протяженной системы | 1988 |
|
SU1789415A1 |
Изобретение относится к области летательных аппаратов (ЛА), а именно к устройствам управления аэродинамическими поверхностями. Механизм управления аэродинамическими поверхностями содержит подшипники, электродвигатель, редуктор, кривошип, ползун либо ролик, а также датчик обратной связи. При этом для приведения в движение аэродинамической поверхности используется плоский кривошипно-кулисный механизм, в котором кулиса непосредственно совмещена с аэродинамической поверхностью, на торцевой поверхности которой выполнен паз для ползуна или ролика, либо выполнена отдельно и закреплена на валу аэродинамической поверхности. Причем кривошип установлен на выходном валу редуктора привода, а датчик обратной связи установлен на валу аэродинамической поверхности либо на валу кривошипа. Такое решение позволяет существенно сократить габариты и массу редуктора привода, разгрузить детали привода от восприятия аэродинамических усилий, оптимизировать моментно-скоростную характеристику привода, установить датчик обратной связи непосредственно на валу аэродинамической поверхности. 4 ил.
Механизм управления аэродинамическими поверхностями, содержащий подшипники, электродвигатель, редуктор, кривошип, ползун либо ролик, датчик обратной связи, отличающийся тем, что для приведения в движение аэродинамической поверхности используется плоский кривошипно-кулисный механизм, в котором кулиса непосредственно совмещена с аэродинамической поверхностью, на торцевой поверхности которой выполнен паз для ползуна или ролика, либо выполнена отдельно и закреплена на валу аэродинамической поверхности, при этом кривошип установлен на выходном валу редуктора привода, а датчик обратной связи установлен на валу аэродинамической поверхности либо на валу кривошипа.
| Блок рулевых приводов ракеты или снаряда | 2020 |
|
RU2740978C1 |
| US 8921749 B1, 30.12.2014 | |||
| СПОСОБ ПРОВЕРКИ ПРИВЕДЕНИЯ В РАБОЧЕЕ СОСТОЯНИЕ ГЕРМЕТИЧНОГО АВТОПИЛОТНОГО БЛОКА | 1997 |
|
RU2126949C1 |
| ВОДЯНОЙ ОТОПИТЕЛЬНЫЙ КОТЕЛ | 2005 |
|
RU2282112C1 |

