Изобретение относится к судостроению, а именно к способам и устройствам выверки положения площадок для приборов и оборудования в период достройки корабля на плаву, а также при периодических проверках в период эксплуатации.
В процессе постройки корабля возникает ряд задач, связанных с определением положения конструкций и изделий в корабельной системе координат: основная плоскость (ОП), диаметральная плоскость (ДП), плоскость мидель-шпангоута (ПМШ).
При работе на стапеле корабль и, соответственно, его ОП не подвержены качке, а задачи определения положения конструкций относительно ОП решаются с помощью широко распространенных средств измерений (квадрантов, теодолитов, тахеометров и др.).
Однако, при достижении 70÷80% водоизмещения корабль, как правило, спускается на воду, где производится значительное количество достроечных и проверочных работ. К этим работам относятся следующие:
- монтаж корпусных конструкций (платформы, надстройки, краны и т.д.);
- монтаж фундаментов под оборудование или вооружение;
- выравнивание станков для механической обработки фундаментов;
- установка механизмов и навигационных комплексов;
- юстировка спецоборудования.
Фиксация ОП корабля (условного горизонта) для производства проверочных работ осуществляется контрольными площадками (КП) еще на стапеле. Когда корабль спускается на воду, он практически постоянно подвержен качке, т.е. крену, дифференту, и такие же наклоны получают КП, что осложняет процесс проверочных работ.
Известны два способа-аналога - это способ проверки положения оборудования относительно диаметральной плоскости судна на плаву [а.с. №830113] и способ определения и согласования оборудования относительно базовой диаметральной плоскости судна на плаву [а.с. №832334]. Указанные способы предусматривают использование 2-х теодолитов, снабженных электрическими уровнями, и не могут быть использованы на практике ввиду отсутствия промышленных образцов электрических уровней необходимой точности для работы в динамическом режиме.
В практике отечественного кораблестроения повсеместно продолжает применяться традиционный, принятый за прототип способ измерения положения контрольной площадки, связанной со средством измерения (теодолитом), относительно базовой площадки корабля, осуществляемый двумя операторами при помощи двух квадрантов путем визуальной регистрации колебаний пузырьков ампул квадрантов [Л.П. Гаврилюк, Оптические методы проверочных работ СПб.: ФГУП ЦНИИТС, 2004, с. 71-74, УДК 681.783:629.5.002.72] и [Л.П. Гаврилюк, Основы согласования корабельных комплексов вооружения, СПб.: ОАО «ЦТСС», 2011, с. 180-183, УДК 623.8.9].
Выверку положения контролируемой поверхности относительно базовой площадки по указанному способу выполняют два оператора, между которыми должна быть установлена надежная телефонная связь. Перед началом работ необходимо поверить «место нуля» и параллельность оси ампулы относительно нижней поверхности основания каждого квадранта:
- показания обоих квадрантов при перестановке на угол 180° должны быть одинаковы по значению и противоположны по знаку. Допускаемая разность показаний квадрантов не должна превышать половины деления ампулы уровня (5'');
- сумма измеренных углов при перестановке квадранта на 180°±30'' на поверхности, расположенной в направлении измерений под углом 45°±5° относительно горизонтальной плоскости, должна находиться в пределах 180°±30''.
Необходимая регулировка осуществляется разворотом основания квадранта относительно его корпуса, следовательно, и относительно оси ампулы уровня. После регулировки винты крепления основания с корпусом квадранта должны быть надежно затянуты.
Выверку положения поверхности контролируемой площадки относительно базовой площадки следует выполнять в параллельном и перпендикулярном направлениях к ДП судна. При измерениях в направлении, параллельном диаметральной плоскости, один из квадрантов должен быть установлен на базовой площадке, а другой на контролируемой поверхности, и оба квадранта должны быть ориентированы в направлении, параллельном ДП.
При измерениях в направлении, перпендикулярном ДП, оба квадранта должны быть ориентированы в таком же направлении.
В заданном направлении оба оператора винтами уровней квадрантов должны добиться приблизительно симметричных колебаний пузырька уровня относительно нулевого (среднего) положения. Оператор, работающий на базовой площадке, не вращая винт уровня квадранта, сообщает по телефону второму оператору момент прохождения пузырьком уровня нулевого положения, а второй оператор, вращая винт уровня своего квадранта, должен добиться на нем такого же положения.
Затем второй оператор проверяет указанное совпадение в течение двух последующих команд от первого оператора. При этом допускаемое отклонение от нулевого положения пузырька уровня на втором квадранте не должно превышать одного деления уровня.
После этого по команде второго оператора оба оператора должны записать отсчеты по лимбам квадрантов. Разность отсчетов представляет собой наклон контролируемой поверхности относительно базовой площадки по данному направлению.
Описанный прототип имеет следующие недостатки:
- случайные погрешности при визуальном считывании показаний;
- погрешность, возникающая при синхронизации по телефону;
- трудоемкость процесса измерения.
Технической задачей заявленного изобретения является разработка более технологичного способа выверки положений регулируемых площадок относительно базовой контрольной площадки с использованием современного способа коммуникации, обеспечивающего снижение трудоемкости.
Технический результат заключается в повышении точности выверки положения регулируемых корабельных площадок и снижении длительности технологического процесса.
Указанный технический результат достигается в способе выверки положения регулируемых корабельных площадок относительно базовой контрольной площадки с помощью измерительного устройства, состоящего из двух одинаковых модулей с брусковыми уровнями, связанными коммуникационной линией. При выверке сначала устанавливают оба модуля на базовую контрольную площадку корабля параллельно заданному азимутальному направлению и с помощью содержащихся в них экзаменаторов производят настройку модулей относительно горизонта для обеспечения синхронных и симметричных колебаний пузырьков в обоих уровнях модулей. После этого один модуль перемещают на выверяемую площадку и устанавливают по заданному ранее на базовой площадке азимутальному направлению, и путем механической регулировки наклона выверяемой площадки достигают синхронизации включения световых и звуковых индикаторов от разных модулей в момент прохождения пузырьков через центры уровней обоих модулей, обеспечивая параллельное расположение в пространстве базовой и выверяемой площадок корабля, после чего фиксируют положение выверенной площадки.
Известен созданный ФГУП ЦНИИМ в 80-х годах прошлого века электронный уровень «Микрад», принятый за прототип устройства для осуществления предлагаемого способа. [Госреестр 10084-85 Уровни электронные Микрад], [Метрология (Приложение к журналу «Измерительная техника) №2, 1983 г., 621.38:006.065:542.2, Л.Л. Зейгман, В.В. Леонов, Применение стандартных пузырьковых ампул для создания электронных уровней, с. 20-25].
При использовании в этом приборе ампулы в качестве чувствительного элемента перемещение ее пузырька преобразуется в изменение емкости конденсатора, образованного приклеенными на ампулу обкладками. Значения емкости этого датчика зависит от его геометрии и эквивалентной диэлектрической проницаемости вещества, заполняющего конденсатор. Эквивалентная относительная диэлектрическая проницаемость 8 при отсутствии пузырька, определяемая свойствами стекла ампулы и эфироспиртовой смеси, заполняющей ампулу, находится в пределах 8≤ε≤14.
Диэлектрическая постоянная пузырька, который состоит из паров эфира и спирта, близка к единице, поэтому эффективная относительная диэлектрическая проницаемость при наличии пузырька становится меньше и находится в пределах 2÷2,5. Изменения положения пузырька приводят к изменению емкости конденсатора.
В приборе «Микрад» использована система двух дифференциально включенных конденсаторов, обкадки которых расположены симметрично относительно центра ампулы, что допускает ее применение как нуль-органа. Сама ампула подвешена на пластинчатом торси-оне и приводится в равновесное состояние относительно горизонта с помощью сложной электродинамической системы по сигналам от накладных конденсаторов, включенных в мостовую измерительную цепь.
С позиций применимости этого прибора для заявленного способа имеются некоторые ограничения. Электронный уровень «Микрад» имеет узкий диапазон измерения ±1000'' и период установления показаний в единицы секунд, в то время как при выверке контрольных площадок корабля на плаву углы наклона его корпуса при качке могут составлять 5° и более, а время прохождения ОП через горизонтальное положение с отклонением ±10'' составляет не более секунды. Производство единичных экземпляров уровней «Микрад» было прекращено до 2000 года. Реализация предлагаемого способа должна быть ориентирована на использование серийных стандартизованных, метрологически обеспеченных инструментальных компонентов, например, как предлагаемые заявителем брусковые уровни.
Рабочий участок ампул промышленных типоразмеров брусковых уровней, по которому перемещается пузырек, в 2 раза короче, чем в уникальной ампуле прибора «Микрад» с приклеенными электродами, что требует соответствующего подбора формы и размеров системы электродов сменного накладного конденсатора и разработки оригинальной конструкции съемного датчика прохождения пузырька через центр ампулы.
Задачей заявленного изобретения является разработка измерительного устройства для осуществления способа выверки контрольных площадок при использовании современной коммуникации между модулями устройства, инициирующими формирование дискретных световых и звуковых сигналов, воспринимаемых оператором при переходе пузырьковых уровней, расположенных на 2-х разнесенных контрольных площадках корабля, через равновесное состояние горизонта при качке корабля на плаву.
Технический результат, достигаемый при реализации заявленного изобретения-устройства, состоит в частичной автоматизации способа выверки положения контрольных площадок корабля на плаву, обеспечивающий повышение ее точности и снижение длительности технологического процесса.
Указанный технический результат достигается в измерительном устройстве, состоящем из двух одинаковых модулей, каждый из которых содержит закрепленный на экзаменаторе брусковый уровень с пузырьковой ампулой, на обозначенный рисками центр которой установлен съемный емкостный датчик (далее - датчик) с высокочастотной резонансной измерительной цепью, фиксирующий момент прохождения под ним пузырька ампулы. При этом основание упомянутого датчика выполнено из диэлектрического материала, имеющего тангенс угла диэлектрических потерь порядка 0,0005, прилегающая к ампуле поверхность основания имеет полуцилиндрическую форму, соразмерную диаметру ампулы, на этой поверхности закреплены два накладных электрода, выполненные из полосок фольги шириной не более 4 мм, один электрод имеет П-образную форму, а внутри его с зазором не менее 1 мм от сторон П расположена полоска второго электрода. Продольная сторона сборки электродов имеет размер длины пузырька и расположена вдоль оси ампулы, на верхней стороне основания установлены электроэлементы измерительной цепи датчика, настроенной на частоту порядка 32÷36 МГц, закрытые корпусом, датчик кабелем соединен с регистрирующим электронным блоком, формирующим звуковую и световую индикацию момента прохождения пузырька через центральный участок ампулы. Кроме того, в каждом электронном блоке предусмотрен сдвоенный комплект светового и звукового индикаторов от разных модулей, связанных коммуникационной линией.
Конструкция и схема регистрирующего электронного блока стандартная и содержит кварцевый генератор синусоидального напряжения частотой порядка 32÷36 МГц, выпрямитель сигнала датчика с цепью регулируемого опорного напряжения, усилитель сигнала датчика, формирователь регистрирующего импульса, звуковой генератор, схему запуска индикаторов, сдвоенные световой и звуковой индикаторы, источник питания от аккумуляторных батарей или сетевого напряжения, при этом электронные регистрирующие блоки обоих модулей присоединены к коммуникационной (проводной или беспроводной) линии передачи электрических сигналов для функционирования сдвоенных световых и звуковых индикаторов, а звуковые генераторы обоих регистрирующих блоков настроены на отличающиеся частоты в средней области диапазона слышимости оператора.
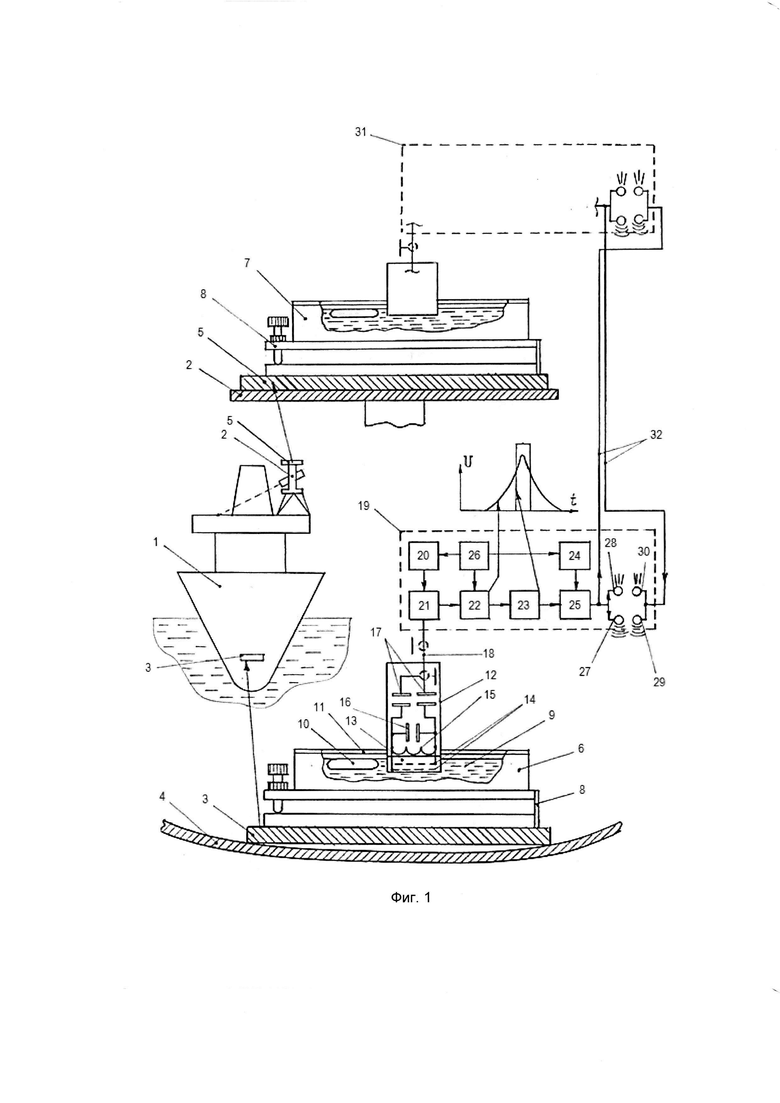
Заявленное техническое решение поясняется рисунками: фиг. 1, на котором представлена инструментальная система для выверки положения регулируемых корабельных площадок; фиг. 2, на котором представлена конструкция датчика измерительного устройства; фиг. 3 - фотография макета одного модуля измерительного устройства для осуществления заявленного способа.
На рисунке (фиг. 1) условно изображен корпус корабля 1, находящийся на плаву, на котором установлено средство измерения 2 (например, теодолит). В нижней части корпуса 1, менее подверженной деформациям при качке, установлена базовая контрольная площадка 3 на жесткой корпусной конструкции 4. На корпусе средства измерения 2 установлена штатная контрольная площадка 5, которая подлежит установке параллельно с базовой контрольной площадкой 3 с помощью регулировочных винтов основания средства измерения 2. На контрольных площадках 3 и 5 идентично установлены брусковые уровни 6 и 7, размещенные на экзаменаторах 8. В состав каждого брускового уровня входят ампула 9 с пузырьком 10, крышка 11 с окном для доступа к центральной части ампулы, где устанавливается датчик 12 прохождения под ним пузырька, например, в процессе качки корабля. В состав этого датчика входят основание 13 с внутренней полуцилиндрической поверхностью, соразмерной диаметру ампулы. На внутреннюю поверхность основания приклеены фольговые электроды 14 емкостного преобразователя.
Сверху основания датчика установлены катушка индуктивности 15 и конденсатор 16, образующие резонансный высокочастотный контур, и согласующие конденсаторы 17 для кабеля связи 18 контура с электронным регистрирующим блоком 19. В состав этого блока входят высокочастотный генератор 20 возбуждения резонансного контура, выпрямитель сигнала датчика с цепью регулируемого опорного напряжения 21, усилитель сигнала датчика 22, формирователь регистрирующего импульса 23, звуковой генератор 24, схема запуска светового и звукового индикаторов 25, блок питания 26, комплект световых и звуковых индикаторов 27÷30. Электронные блоки 19 и 31 для обоих брусковых уровней полностью идентичны. Они соединены между собой коммуникационной линией передачи электрических сигналов 32.
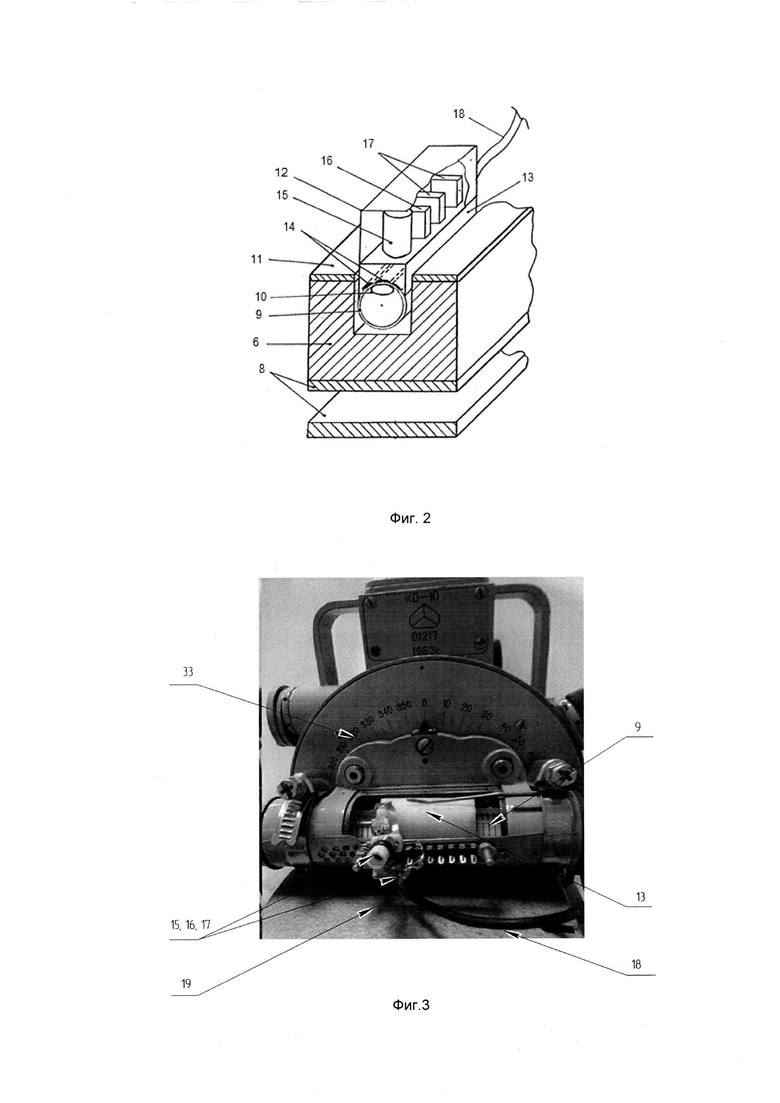
Принцип конструктивного исполнения датчика прохождения пузырька и установки его на ампулу стандартного брускового уровня представлен на рисунке (фиг. 2).
Корпус брускового уровня 6 закреплен на экзаменаторе 8. В пазу корпуса установлена ампула 9 с пузырьком 10. Корпус сверху закрыт крышкой 11 с окном для доступа к ампуле, через которое на ампулу устанавливается датчик 12. Основание датчика выполнено из материала с малыми диэлектрическими потерями. Прилегающая к ампуле сторона основания имеет полуцилиндрическую форму, соразмерную диаметру ампулы, к этой стороне приклеены два накладных электрода 14, один из которых имеет П-образную форму. Сверху на основании установлены электроэлементы измерительной резонансной цепи: катушка индуктивности 15, конденсатор резонансного контура 16, согласующие конденсаторы 17 для кабеля 18 связи датчика с электронным блоком.
Согласование систем координат средства измерения и корабля, находящегося на плаву, путем выверки их контрольных площадок производится следующим образом (фиг. 1).
Предварительно на центральные, имеющие риски участки пузырьковых ампул 9 стандартных брусковых уровней 6 и 7, накладывают датчики 12, фиксирующие момент прохождения под ними пузырька 10 при качке, соединенные каждый гибким кабелем 18 с электронными блоками 19 и 31, производящими по сигналам датчиков включение и выключение световых 28, 30 и звуковых 27, 29 индикаторов синхронно с прохождением пузырька через центр ампулы.
Оператор устанавливает оба брусковых уровня на базовую контрольную площадку 3 корабля параллельно по азимутальному направлению ДП, зафиксированному базовыми отметчиками, и с помощью экзаменаторов 8 производит настройку уровней относительно горизонта с целью обеспечения синхронных и симметричных колебаний пузырьков обоих уровней при любой форме качки судна относительно горизонта, как симметричной, так и не симметричной, пользуясь световой и звуковой сигнализацией электронных блоков уровней.
Затем оператор оставляет первый модуль, содержащий компоненты 6, 8, 12, 19, стационарно на базовой контрольной площадке корабля, присоединив его электронный блок 19 к линии 32 передачи электрических сигналов, соответствующих включению световых и звуковых индикаторов, а второй модуль с компонентами 7, 8, 31 перемещает к месту расположения стандартного средства измерения 2, устанавливает брусковый уровень 7 с настроенным ранее экзаменатором на штатную контрольную площадку 5 средства измерения по направлению, совпадающему с азимутальным направлением первого модуля, установленного на базовой контрольной площадке 3 корабля, и присоединяет электронный блок 31 второго модуля к линии передачи электрических сигналов 32, после чего оператор путем механической регулировки по горизонту стандартного средства измерения 2 с закрепленной на нем площадкой 5 добивается синхронизации включения световых и звуковых индикаторов электронных блоков обоих модулей, обеспечивая параллельное расположение в пространстве контрольной площадки средства измерения с базовой площадкой корабля, что дает возможность измерения геометрических параметров корабля в его собственной системе координат.
Предложенное измерительное устройство для осуществления описанного выше способа, функционирует следующим образом (фиг. 1).
При прохождении газового пузырька 10 под накладными электродами 14 датчика 12 уменьшается средняя величина диэлектрической проницаемости материала наполнителя ампулы (смеси спирта и эфира), находящегося в электромагнитном поле электродов. Это приводит к уменьшению общей емкости измерительной цепи, состоящей из элементов резонансного контура 14, 15, 16, 17, изменению ее собственной резонансной частоты при питании от стабильного кварцевого генератора 20, имеющего на практике частоту в пределах 32÷36 МГц. Разбаланс частот генератора и резонансного контура с помощью выпрямителя сигнала датчика 21 с цепью регулируемого опорного напряжения преобразуется в сигнал прохождения пузырька, близкий к треугольной форме (u=f(t), где u - величина напряжения сигнала, t - время его действия) с вершиной в положении пузырька, симметричном по отношению к электродам 14 датчика. Выпрямленный сигнал датчика поступает на усилитель 22, а после него на формирователь прямоугольного импульса 23, регистрирующего прохождение пузырьком узкой зоны геометрического центра ампулы. С помощью схемы 25 на время длительности импульса формируются напряжения питания светодиода 28 и электродинамика 27. С помощью электропроводной линии 32 эти напряжения передаются к сдвоенным светодиоду и электродинамику, расположенным в электронном блоке 31 второго брускового уровня 7.
Заявленное устройство позволяет реализовать новый способ согласования систем координат средства измерений и корабля, находящегося на плаву, с привлечением только одного оператора и обеспечивает возможность существенного снижения трудоемкости и повышения точности процесса выверки взаимного расположения контрольных площадок при качке корабля благодаря автоматическому формированию и дистанционной передаче воспринимаемых оператором регистрирующих сигналов.
Макетный образец предложенного устройства, изготовленный и испытанный на лабораторной базе заявителя, представлен на прилагаемом фотоснимке (фиг. 3).
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| АВТОМАТИЗИРОВАННЫЙ КОРАБЕЛЬНЫЙ КОМПЛЕКС СВЕТОСИГНАЛЬНОЙ СВЯЗИ | 2015 |
|
RU2600121C1 |
| Система посадки летательного аппарата на корабль с применением цифровых технологий | 2020 |
|
RU2734173C1 |
| Система"Автоматический световой указатель положения палубы при качке" | 2018 |
|
RU2695029C1 |
| АУДИОЭЛЕКТРОННЫЙ УРОВЕНЬ | 1994 |
|
RU2082092C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛА НАКЛОНА | 2016 |
|
RU2655024C2 |
| СПОСОБ ПОСАДКИ ВЕРТОЛЕТА НА КОРАБЛЬ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2673314C1 |
| Экзаменатор уровня | 1982 |
|
SU1012019A1 |
| Корабельный динамический аэропричал для мультикоптеров | 2023 |
|
RU2828127C1 |
| Способ высокоточного определения углов наклона контролируемого объекта, инженерного или природного, при геодезическом мониторинге посредством технологии компьютерного зрения в режиме реального времени в условиях экстремально низких температур окружающей среды и устройство для его осуществления | 2022 |
|
RU2800188C1 |
Изобретение относится к судостроению, а именно к способам и устройствам выверки положения площадок для приборов и оборудования в период достройки корабля на плаву, а также при периодических проверках в период эксплуатации. Технический результат, достигаемый от осуществления заявленной группы изобретений, заключается в повышении точности выверки положения регулируемых корабельных площадок и снижении длительности технологического процесса. Способ выверки положения регулируемых корабельных площадок относительно базовой контрольной площадки с помощью измерительного устройства, состоящего из двух одинаковых модулей с брусковыми уровнями, связанными коммуникационной линией, заключается в том, что сначала устанавливают оба модуля на базовую контрольную площадку корабля параллельно заданному азимутальному направлению и с помощью содержащихся в них экзаменаторов производят настройку модулей относительно горизонта для обеспечения синхронных и симметричных колебаний пузырьков в обоих уровнях модулей, после чего один модуль перемещают на выверяемую площадку и устанавливают по заданному ранее на базовой площадке азимутальному направлению, и путем механической регулировки наклона выверяемой площадки достигают синхронизации включения световых и звуковых индикаторов от разных модулей в момент прохождения пузырьков через центры уровней обоих модулей, обеспечивая параллельное расположение в пространстве базовой и выверяемой площадок, после чего фиксируют положение выверенной площадки. Измерительное устройство для реализации вышеописанного способа состоит из двух одинаковых модулей, каждый из которых содержит закрепленный на экзаменаторе брусковый уровень с пузырьковой ампулой, на обозначенный рисками центр которой установлен емкостный датчик с высокочастотной резонансной измерительной цепью, фиксирующий момент прохождения под ним пузырька ампулы. Основание датчика выполнено из диэлектрического материала, имеющего тангенс угла диэлектрических потерь порядка 0,0005, прилегающая к ампуле поверхность основания имеет полуцилиндрическую форму, соразмерную диаметру ампулы, к этой поверхности закреплены два накладных электрода, выполненные из полосок фольги шириной не более 4 мм, один электрод имеет П-образную форму, а внутри него с зазором не менее 1 мм от внутренней стороны «П» расположена полоска второго электрода, продольная сторона сборки электродов имеет размер длины пузырька и располагается по направлению оси ампулы, на верхней стороне основания датчика установлены закрытые корпусом электроэлементы измерительной цепи датчика, настроенной на частоту порядка 32÷36 МГц, датчик кабелем соединен с регистрирующим электронным блоком, формирующим звуковую и световую индикацию моментов прохождения пузырька через центральный участок ампулы уровня, в каждом электронном блоке предусмотрен сдвоенный комплект светового и звукового индикаторов от разных модулей, связанных коммуникационной линией. 2 н.п. ф-лы, 3 ил.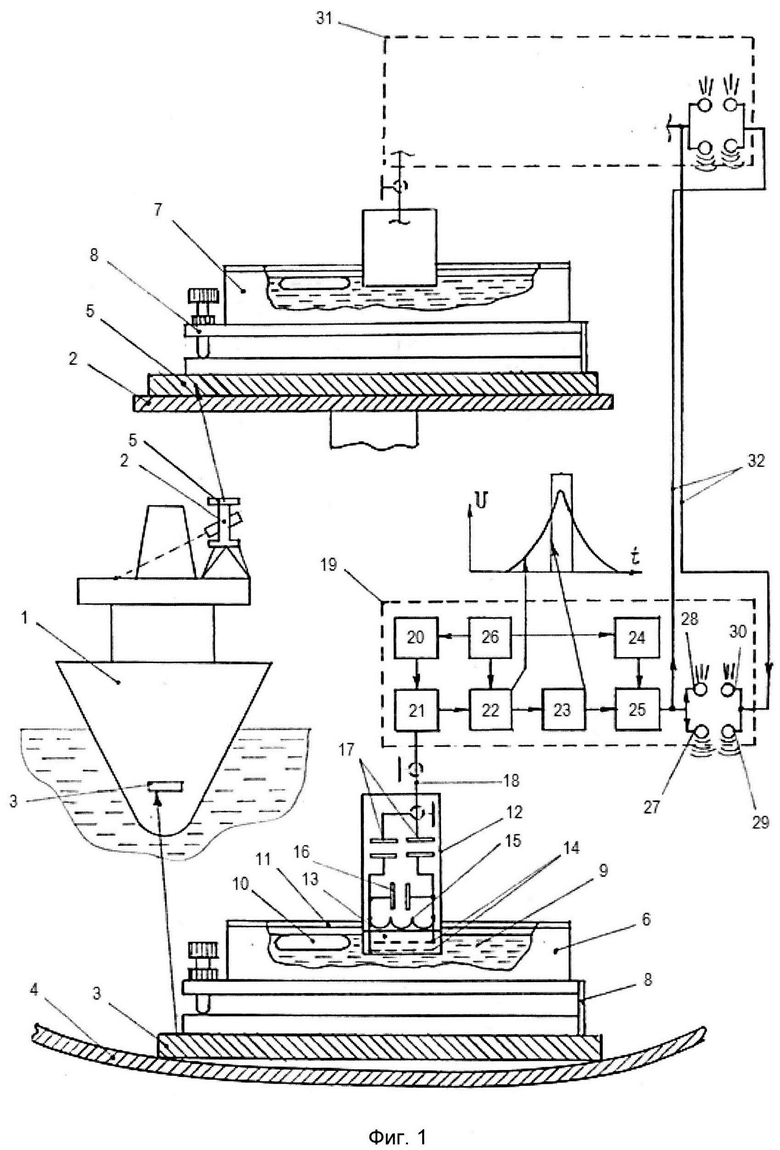
1. Способ выверки положения регулируемых корабельных площадок относительно базовой контрольной площадки с помощью измерительного устройства, состоящего из двух одинаковых модулей с брусковыми уровнями, связанными коммуникационной линией, отличающийся тем, что сначала устанавливают оба модуля на базовую контрольную площадку корабля параллельно заданному азимутальному направлению и с помощью содержащихся в них экзаменаторов производят настройку модулей относительно горизонта для обеспечения синхронных и симметричных колебаний пузырьков в обоих уровнях модулей, после чего один модуль перемещают на выверяемую площадку и устанавливают по заданному ранее на базовой площадке азимутальному направлению, и путем механической регулировки наклона выверяемой площадки достигают синхронизации включения световых и звуковых индикаторов от разных модулей в момент прохождения пузырьков через центры уровней обоих модулей, обеспечивая параллельное расположение в пространстве базовой и выверяемой площадок, после чего фиксируют положение выверенной площадки.
2. Измерительное устройство для реализации способа по п. 1, состоящее из двух одинаковых модулей, каждый из которых содержит закрепленный на экзаменаторе брусковый уровень с пузырьковой ампулой, на обозначенный рисками центр которой установлен емкостный датчик с высокочастотной резонансной измерительной цепью, фиксирующий момент прохождения под ним пузырька ампулы, отличающееся тем, что основание датчика выполнено из диэлектрического материала, имеющего тангенс угла диэлектрических потерь порядка 0,0005, прилегающая к ампуле поверхность основания имеет полуцилиндрическую форму, соразмерную диаметру ампулы, к этой поверхности закреплены два накладных электрода, выполненные из полосок фольги шириной не более 4 мм, один электрод имеет П-образную форму, а внутри него с зазором не менее 1 мм от внутренней стороны «П» расположена полоска второго электрода, продольная сторона сборки электродов имеет размер длины пузырька и располагается по направлению оси ампулы, на верхней стороне основания датчика установлены закрытые корпусом электроэлементы измерительной цепи датчика, настроенной на частоту порядка 32÷36 МГц, датчик кабелем соединен с регистрирующим электронным блоком, формирующим звуковую и световую индикацию моментов прохождения пузырька через центральный участок ампулы уровня, в каждом электронном блоке предусмотрен сдвоенный комплект светового и звукового индикаторов от разных модулей, связанных коммуникационной линией.
| Способ отображения информации о вертикальном перемещении корабельной взлетно-посадочной площадки при посадке вертолета на корабль | 2016 |
|
RU2613124C1 |
| Приспособление для выверки конструкций | 1989 |
|
SU1694827A1 |
| RU 2004123725 A, 20.01.2006 | |||
| CN 104760663 A, 08.07.2015 | |||
| KR 101051333 B1, 22.07.2011 | |||
| US 5302833 A1, 12.04.1994. | |||

