Изобретение относится к системам информационно-технического обеспечения и синтеза системы посадки для построения управления посадки летательных аппаратов (ЛА) вертикального взлета и посадки на корабли из области окончания действия индикаторов глиссады и курса.
В настоящее время наиболее перспективным классом систем посадки являются спутниковые радионавигационные системы посадки. Принцип их действия предполагает использование сигналов спутниковых навигационных систем и разделение системы на бортовой (вертолетный) и корабельный сегменты, в состав каждого из которых входят приемники спутниковых навигационных систем, причем работа указанных приемников осуществляется в режиме относительной навигации с использованием фазовых измерений, благодаря чему достигается высокая точность определения координат одного приемника относительно другого. Реализация этого режима работы предполагает передачу в реальном времени навигационных данных (результатов измерений по каждому спутнику) с одного приемника спутниковых навигационных систем другому.
Недостатком решения является сильное влияние помех радиодиапазона, ограниченное применение для посадки на корабль.
Известна система отображения вертикальной привязки на вертолетной системе (см., патент US №9340282 В2 МПК В64С 27/00, публикация от 17.05.2016), включающее определение высоты и местоположения вертолета, систему отображения, графическое представление составного изображения, обеспечивающую точку посадки, формирующей процессором с выверенными вертикальными опорными полюсами.
Недостатком решения является, отсутствие определения фазовых координат вертолета и центра взлетно-посадочной площадки (цВППл), нет дистанционных измерителей параметров ветра, преимущественно посадка с зависанием, нет характеристик оптимальной посадки.
Известна система точной посадки для полетов на морских вертолетах с использованием пространственного анализа (см., патент СА №2955648А МПК B64D 45/08, публикация от 19.01.2017), предусматривающая введение устройство отображения, сконфигурированное для визуализации и отображения трехмерного представления места посадки в реальном времени на основе трехмерной геометрической структурной информации и графической информации рендеринга, обозначающая процесс получения изображения по модели с помощью компьютерной программы, причем устройство отображения выполнено с возможностью фиксировать дополнительное визуальное представление, внутри для осознания происходящего пилоту вертолета при выполнении точных посадок, особенно, в неблагоприятных условиях.
Однако недостатком решения является то, что нет оценки цены риска посадки, в системе используются радиомаяки, спутниковая навигационная технология и поэтому система имеет ограниченное применение на корабле.
Известна система информационного обеспечения пилота для посадки/взлета вертолета на судовую или корабельную взлетно-посадочную площадку (см., патент RU №2695029С1 МПК B64F 1/18, публикация от 18.07.2019), содержащая четыре источника света, размещенные горизонтально и вертикально и индицирующие допустимый и критический поперечный угол и продольный угол уклона взлетно-посадочной площадки соответственно, два источника света, размещенные в верхней и нижней частях "креста" и индицирующие направление вертикального перемещения в центр корабельной взлетно-посадочной площадки цВППл вверх и вниз соответственно, блок сопряжения, программируемый логический контроллер прибора управления, датчик положения, панель оператора, источник бесперебойного питания, встроенный в прибор управления.
Однако недостатком решений является то, что самостоятельного значения представленный индикатор не имеет, а используется в системе посадки, в которой не определяются относительные координаты цВППл и вертолета, и координаты вертолета в земной системе координат, что приводит к большим отклонениям точки посадки от цВППл и большим относительным скоростям ВППл и вертолета.
Известна система визуального отображения вертикальной привязки - точка посадки вертолета (см., патент ЕР №15150993.2А МПК В64С 27/00, публикация от 13.01.2015, а также патент US №9340282 В2 МПК В64С 27/00, публикация от 17.05.2016), содержащая источники данных о высоте цВППл и местоположения вертолета, а также процессор, генерирующий графическое представление с отображением точки посадки вертолета в цВППл на дисплее пилота.
Выше приведенные технические решения позволяют осуществить визуально-вертикальную привязку на трехмерном графическом дисплее при посадке вертолета в цВППл корабля, когда пилот может быстро и легко принять вертикальную привязку, а также информацию о крене, что существенно повышает ситуационную осведомленность пилота.
Однако недостатком решения является отображение информации об относительном движении вертолета и цВППл на трехмерном графическом дисплее, что затрудняет восприятие пилотом одновременно высоты и местоположения вертолета, отсутствие индикации относительных скоростей цВППл и вертолета, отсутствует дистанционный измеритель вектора скорости ветра, отсутствует канал автоматической посадки, нет оценки цены риска посадки.
Известна интеллектуальная вертолетная площадка для поддержки посадки самолета с вертикальным взлетом и посадкой (см., патент US №9174747 В2 МПК B64F 1/18, публикация от 03.11.2015), включающая адаптивное отображение маркера, распознаваемого камерой, установленной на ЛА с вертикальным взлетом и посадкой; получение информации о наклоне поверхности земли и поверхности моря с использованием гироскопа; причем регулируют посадочную площадку, соединенную с блоком отображения, на котором отображается маркер, так, чтобы он был параллелен горизонтальной линии на основе информации о наклоне, используя платформу движения, имеющую чувствительность к изменениям во всех направлениях.
ЛА с вертикальным взлетом и посадкой дополнительно включает в себя устройство отображения, сконфигурированное для визуализации и отображения трехмерного представления посадочной площадки в режиме реального времени на основе трехмерной геометрической структурной информации и графической информации рендеринга.
Недостатком решения является отсутствие измерений относительных скоростей ВППл и ЛА с вертикальным взлетом и посадкой, посадка осуществляется по совпадению угла крена ВППл и истинного горизонта, отсутствует дистанционный измеритель вектора скорости ветра над ВППл, что может привести к существенному отклонению точки посадки от цВППл, нет оценки цены риска посадки.
Известна система управления полетами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах (см., патент RU №2667654 МПК G08G 5/00, G05B 15/02, G06F 15/16, B64F 1/18, публикация от 21.09.2018), содержащая автоматизированное рабочее место руководителя полетов, устройства сопряжения по цифровым каналам, устройство сопряжения и обработки первичной информации, центральные вычислители, средства документирования информации, соединенные через основную сеть. Причем автоматизированное рабочее место руководителя полетов содержит графические станции, главный управляющий компьютер, видеосервер, устройство отображения и ввода информации, устройство управления курсором, клавиатуру, коммутатор, терминал управления техническими средствами обеспечения полетов, терминал управления средствами связи, соединенные определенным образом.
Обеспечивается расширение функциональных возможностей системы управления полетами для взлета, управления полетом, посадкой вертолетов, не оснащенных средствами ближней навигации, автоматизация процессов управления, повышение эффективности принятия решений руководителем полетов, повышение безопасности полетов.
Однако недостаток данного решения заключается в том, что отсутствие относительной навигации цВППл и вертолета, отсутствие индикации положения вертолета в земной системе координат приводит к ограничению углов ВППл и к ограничению области применимости вертолета по метеоусловиям, при этом отсутствие дистанционного измерителя вектора скорости ветра над ВППл, также приводит к дополнительному отклонению точки посадки от цВППл, не определена область применимости вертолета по метеусловиям, нет оценки цены риска посадки.
Известна интеллектуальная вертолетная площадка для поддержки посадки ЛА с возможностью вертикального взлета и посадки (см., патент KR №101709812 В1 МПК B64F 1/18, публикация от 23.03.2017), включающая адаптивное отображение распознаваемого камерой маркера, несущего изображение, установленного на ЛА с вертикальным взлетом и посадкой, причем получение информации о наклоне на земле и поверхности моря с помощью гироскопа. И регулируют посадочную площадку, соединенную с блоком отображения, на котором отображается маркер, на основе информации так, чтобы она была параллельна горизонтальной линии, используя платформу движения, имеющую чувствительность к изменениям по всем направлениям.
Однако недостаток данного решения заключается в том, что отсутствие измерений относительных скоростей ВППл и ЛА, посадка осуществляется лишь по совпадению угла крена ВППл, отсутствует дистанционный измеритель вектора скорости ветра над ВППл, что может привести к существенному отклонению точки посадки от цВППл, нет оценки цены риска посадки.
Известна оптическая система посадки вертолета на корабельную взлетно-посадочную площадку (см., патенты RU №2692413 МПК B64F 1/20, B64D 43/04. G08G 5/02, публикация от 24.06.2019 и RU №2695029С1, публикация от 18.07.2019), содержащая светосигнальную систему, состоящую из индикатора глиссады, индикатора курса, указателя истинного горизонта, индикатора истинной вертикали и вертикального перемещения, размещенных на надстройках корабля, данная система ограничивает область применимости вертолета углами бортовой качки |±10|°, дифферента |±3°|, на корме корабля реализован оптический индикатор дальности в виде комбинации источников оптического излучения, установленных на заданных расстояниях друг от друга, причем данная система обеспечивает визуальное распознавание экипажем информации о направлении и дистанции до корабельной взлетно-посадочной площадки.
Эти известные системы заключительного этапа посадки, основанные на оптических индикаторах, расположенных на корабле, дают количественные оценки движения ВППл относительно морской поверхности, но они не дают экипажу координаты и индикацию ЛА, точки посадки в земной системе координат, текущие относительные координаты цВППл и ЛА. При использовании предложенной системы экипаж должен в условиях недостаточной информации (нет цифровой связи между цВППл и ЛА и нет координат ЛА в земной системе координат) решать задачи прогнозирования траектории движения цВППл, делать оценки: удаления ЛА от цВППл, фазы эволюции ВППл, момента причаливания, безопасного сближения с ангаром, с границей ВППл и поверхностью моря. Решить экипажу ЛА в условиях повышенной психофизической нагрузки этот комплекс задач с приемлемой погрешностью, при малых характерных временах движения ВППл, в СМУ невозможно, поэтому ограничивается область применимости ЛА по метеоусловиям.
Для безопасной посадки необходима максимальная разгрузка экипажа от решения этих задач, а полные данные о параметрах среды посадки и оптимальном управлении ЛА должна дать измерительная система в цифровом виде и программно-математическое обеспечение (ПМО), строящее управление ЛА с минимальной или приемлемой ценой риска посадки.
Наиболее близким по технической сущности и достигаемому результату является система посадки на корабль (см. патент RU №2673314 МПК G05D 1/00, G01C 21/28, G01S 19/44, публикация от 13.11.2018), содержащая навигационные системы авианесущего корабля и ЛА, а также спутниковую навигационную систему, при этом объединение навигационной информации включает дифференциальные операции с использованием измерения фазы несущей, определение относительного положения и скорости вертолета и направление ветра, воздействующего на корабль, а также средство отображения информации, при двух приемопередатчиках для анализа сущности посадки.
Причем техническим результатом изобретения является увеличение точности захода на посадку, повышение безопасности вертолета и улучшение ситуационной осведомленности экипажа вертолета и технического персонала авианесущего корабля.
Недостатком данного решения является то, что система посадки вертолета на корабль построена на основе спутниковой навигационной технологии, подверженной влиянию электромагнитных помех и имеет ограниченное применение на корабле, к тому же два локальных измерителя параметров скорости ветра не дают характеристик вектора скорости ветра в окрестности ВППл с приемлемой погрешностью.
Техническим результатом решения является повышение точности захода ЛА на посадку в зону видимости сигнала стандартных визуальных корабельных систем посадки в сложных метеоусловиях при обеспечении безопасности эксплуатации вертолетов палубного базирования.
Технический результат достигается тем, что система посадки летательного аппарата (ЛА) на корабль с применением цифровых технологий, содержащая навигационную систему корабля, систему метеорологического обеспечения корабля в окрестности взлетно-посадочной площадки, подключенные к электронно-вычислительной машине (вычислительному модулю), соединенного шиной связи с системой управления корабля, приемо-передатчиком корабля, при этом установлен радиоканал связи с приемо-передатчиком ЛА, который соединен через электронно-вычислительную машину (вычислительный модуль) ЛА с системой управления ЛА, а также навигационная система ЛА, при этом введен световой индикатор на ЛА, сигнал которого принимает система относительной навигации корабля для создания точного положения места посадки ЛА, при этом система относительной навигации и навигационная система корабля, а также система метеорологического обеспечения корабля и дистанционного измерителя параметров ветра соединены, соответственно, через задатчик относительных фазовых координат центра взлетно-посадочной площадки (цВППл) и ЛА, а также через задатчик параметров поля вектора скорости ветра с задатчиком параметров среды посадки, подключенного к соответствующим входам приемо-передатчика корабля и вычислительного модуля, связанного с системой управления посадкой ЛА, корабельным индикатором посадки ЛА корабля, причем вычислительный модуль ЛА связан с соответственно с корабельным индикатором посадки ЛА на борту ЛА и через задатчик параметров управления ЛА при автоматической посадке с системой управления ЛА, при этом навигационная система ЛА связана через задатчик цифрового индикатора авиагоризонта ЛА с соответствующим входом вычислительного модуля ЛА, кроме того введены корабельный финишер и бортовой аэрофинишер ЛА, связанные, соответственно, с вычислительными модулями корабля и ЛА.
Для пилотируемой посадки ЛА строятся корабельные индикаторы посадки, где индицируется на плоском экране трехмерный физический процесс посадки, движение ВППл и места посадки в реальном времени в графической информации рендеринга: аквагоризонт - угловые координаты ВППл в символе цВППл, авиагоризонт - угловые координаты ЛА в символе ЛА, положения символов ЛА и цВППл на корабельном индикаторе посадки соответствуют координатам цВППл и ЛА в земной системе координат, корабельный индикатор посадки отображает картину посадки в 3D видео ряде с ракурсом, удобным пилоту и оператору посадки для обозрения параметров, необходимых для данной фазы операции посадки.
Посадка ЛА на ВППл происходит при совмещении индикаций аквагоризонта и авиагоризонта на корабельных индикаторах посадки по цветовым сигналам аквагоризонта, например, коричневый цвет центра аквагоризонта меняется, например, на мигающий зеленый при приближении символа цВППл к оптимальной точке посадки, при этом выполняется выравнивание углов ЛА по углам аквагоризонта при приближении центра авиагоризонта к центру аквагоризонта, далее мигающий зеленый переходит в непрерывный зеленый и производится совмещение символа авиагоризонта и аквагоризонта и осуществляется касание, при пропуске касания цвет символа цВППл становится исходным и непрерывным, причем индикация процесса посадки длится непрерывно до реализации касания при любом числе попыток не зависимо от положения ЛА.
Сущностью решения является пролонгация управлением посадки ЛА на корабль из области окончания действия индикаторов глиссады и курса до момента причаливания ЛА на цВППл в автоматическом и пилотируемом режимах, в СМУ с минимальной ценой риска посадки и определения конструктивного облика аэрофинишера (устройство остановки и удержания ЛА на ВППл после касания), при предельных значениях параметров метеоусловий.
Процедура посадки ЛА на авианесущий корабль осуществляется следующим образом: определяются параметры среды посадки и в этой среде строится оптимальное управление ЛА с минимальной ценой риска посадки с фазовыми и смешанными ограничениями.
Параметры среды посадки ЛА на палубу корабля представляются в земной системе координат (X, Y, Z) вектором S=(Х0, Y0, Z0, X'0,Y'0, Z'0, α, β, γ, α', β', γ', L, V), где X0, Y0, Z0, X'0, Y'0, Z'0, α, β, γ, α', β', γ' - фазовые (' штрих означает производную по времени) пространственные координаты центра цВППл (Х0, Y0, Z0) и угловые (α - угол бортовой качки, β - угол рыскания по курсу и γ - угол дифферента корабля) в земной системе координат; в число параметров среды посадки входят: сила тяжести, метеорологическая дальность видимости (МДВ) - L и параметры поля "кажущегося" ветра (KB) - V в окрестности ВППл, которые определяются при текущих параметрах пространственного положения корабля; параметры движения ЛА в земной системе координат вектором Y=(Хв, Yв, Zв, X'в, Y'в, Z' в, αв, βв, γв, αв' βв', γв'), где Хв, Yв, Zв, Х'в, Y'в, Z'в фазовые линейные и угловые αв, βв, γв, αв', βв', γв' координаты ЛА (углы αв - крена, βв - скольжения и γв - тангажа ЛА).
Качество посадки оценим ценой риска посадки С (S, Y). Предложенная образует Y, как решающую функцию от данных среды посадки, минимизирующую цену риска посадки. Для данной задачи адекватной будет квадратичная функция риска С (S, Y)=М (S - Y, S - Y), характеризующая фазовых координат ЛА и цВППл в точке касания (здесь в С (S, Y) и далее в вектор S не входят параметры L и V). (S - Y, S - Y) - скалярное произведение, М - знак математического ожидания оценок измерения компонентов, S - Y, которые определяются вероятностными параметрами процесса измерений, даваемыми системой. Если при посадке в момент касания обеспечить совпадение фазовых координат ВППл, цВППл и фазовых координат шасси ЛА, то в момент касания сила действия ВППл на ЛА будет равна нулю и С (S, Y)=0. Поскольку S и Y измеренные величины, то минимальная цена риска посадки С0 равна погрешности измерения С (S, Y) предложенной системы и достигается, когда в точке причаливания оценки линейных и угловых фазовых переменных среды посадки и ЛА равны. В этом случае минимум С (S, Y) достигается, когда каждая компонента вектора управления Y, yk=Sk, где Sk и yk, соответственно, оценки k - х компонент векторов Y и S, даваемые предложенной системой. Компоненты вектора S - Y в С (S, Y) представляют сумму квадратов разностей фазовых координат цВППл и шасси ЛА в точке посадки.
Для построения управления посадки ЛА необходимо измерить в реальном времени параметры S и Y в земной системе координат и относительные координаты цВППл и ЛА. Влияние ЛА на движение ВППл пренебрежимо мало для всех типов ЛА, а влияние ВППл на ЛА при причаливании определяется относительными скоростями. Влияние вектора и сдвига скорости ветра, турбулентности на ЛА в окрестности цВППл может быть существенным, для легких ЛА, особенно, когда характерный масштаб поля ветра соизмерим с размером ЛА. Все особенности взаимодействия ЛА и поля вектора скорости ветра (ВСВ) определяются, используя данные дистанционного измерителя ВСВ в окрестности ВППл.
Рассматриваемая система должна удовлетворять дополнительным требованиям, быть помехоустойчивой от внешних источников электромагнитных полей радио и оптического диапазонов. Удовлетворять требованиям минимизации собственных излучений радио обмена ЛА и корабля, вплоть до перехода к связи ЛА и корабля оптического диапазона, построить бортовую часть системы с минимальным весом, габаритами и энергопотреблением.
Сравнение предлагаемого решения с известными техническими решениями показывает, что оно обладает новой совокупностью существенных признаков, которые совместно с уже известными признаками позволяют успешно реализовать поставленную цель.
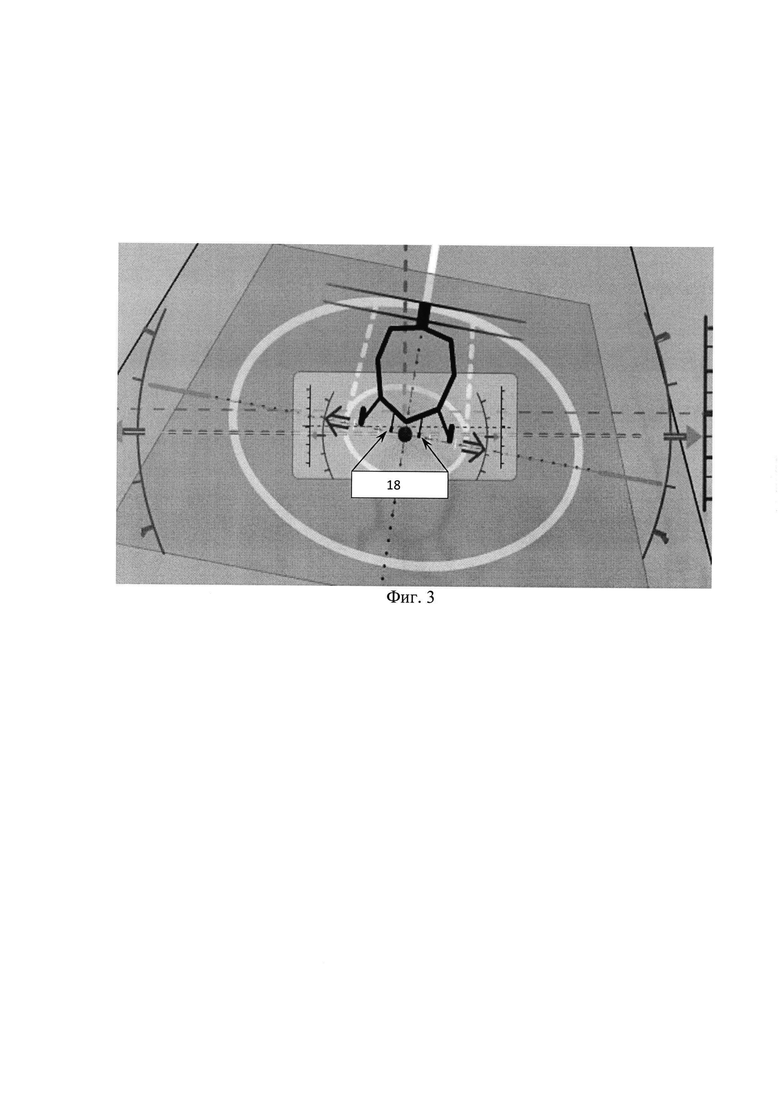
Изобретение проиллюстрировано графическими материалами, где на фиг. 1 приведена системы относительной навигации с относительных координат (ξ, η, ς) с началом в цВППл (Х0, Y0, Z0) и TV - цифровыми телекамерами, ВППл, ангар, ДИПВ - дистанционный измеритель параметров "кажущегося" ветра; на фиг. 2. приведен корабельный индикатор посадки; на фиг. 3 изображен аэрофинишер, удерживающий ЛА на ВППл; на фиг. 4 изображена блок-схема связи составных частей корабля и ЛА, номера блоков соответствуют номерам составных частей системы посадки
Состав системы посадки:
1. Навигационная система корабля (НСК);
2. Система относительной навигации (СОН);
3. Система измерения поля скорости ветра;
3.1 Система метеорологического обеспечения корабля (СМК), измеряющая в реальном времени набегающий на корабль вектор скорости ветра.
3.2 Дистанционный измеритель параметров ветра (ДИПВ) (расположен на ангаре), вектора скорости "кажущегося" ветра, сдвигов скорости ветра и интенсивности турбулентности в окрестности ВППл;
4. ЭВМ корабля и программно-математическое обеспечение (ПМО) вычисления фазовых координат ВППл, цВППл, относительных фазовых координат цВППл и ЛА, определение вектора скорости ветра (ВСВ) и сдвига ветра, построения оптимального управления посадки ЛА на корабль и строящая корабельный индикатор посадки ЛА (КИП);
5. Задатчик фазовых координат ВППл, цВППл, относительных фазовых координат цВППл и ЛА, момента касания ЛА ВППл:
6. Задатчик параметров поля вектора скорости ветра;
7. Задатчик параметров среды посадки;
8. Приемопередатчики;
8.1 Корабельный приемопередатчик;
8.2 Бортовой приемопередатчик;
9.1 Корабельный индикатор посадки ЛА (КИП) на корабле;
9.2 Корабельный индикатор посадки ЛА (КИП) на борту ЛА;
10. ЭВМ летательного аппарата;
11. Задатчик цифрового индикатора авиагоризонта ЛА;
12. Навигационная система ЛА;
13. Источник света ЛА;
14. Система управления посадкой ЛА;
15. Задатчик параметров управления ЛА при автоматической посадке;
16. Система управления ЛА;
17. Летательный аппарат;
18 Финишер;
18.1 Корабельная часть финишера;
18.2 Бортовая часть аэрофинишера;
19. Система управления авианесущим кораблем;
20. Авианесущий корабль;
21. Цифровые телекамеры, входящие в состав СОН.
Система посадки ЛА на корабль с применением цифровых технологий получает данные среды посадки:
- данные от НСК 1 поступающие на электронно-вычислительную машину 4 и по алгоритму, дающему связь фазовых координат НСК 1 и цВППл, получаем Х0, Y0, Z0, Х'0, Y'0, Z'0, α, β, γ, α', β', γ';
- вектор скорости и интенсивность турбулентности KB в окрестности ВППл, получим от дистанционного измерителя параметров ветра 3.2, установленного на ангаре, цифровые данные МСК 3.1 и ДИПВ 3.2 о поле KB поступают в электронно-вычислительную машину 4 и в 6 вычисляются вектор скорости ветра, его пространственные сдвиги и параметры турбулентности, влияющие на процесс посадки в данных метеоусловиях в реальном времени направляются в задатчик параметров среды посадки7;
- вводим прямоугольную систему относительных координат (ξ, η, ς) с началом в цВППл (см. фиг.1) для определения линейных фазовых координат относительного движения ЛА 17 и цВППл;
- измерение линейных фазовых координат, относительного движения ЛА 17 и цВППл, получаем по данным СОН 2, построенной на основе расположенных на ангаре цифровых телекамер 21, соответствующего спектрального диапазона, и используем посадочные огни ЛА 13, спектр которых согласован со спектром телекамер, данная система практически всепогодна (при приближении ЛА 17 к цВППл уменьшается толщина слоя ослабления излучения туманом и осадками - маркерный огонь (он может быть посадочным) расширяет область применимости системы посадки ЛА 17 на корабль в тумане и осадках, оптические помехи исключаются применением полосовых оптических фильтров, не подвержена действию радиопомех и она тем точнее, чем ближе ЛА к цВППл (см. фиг. 1); линейные фазовые координаты относительного движения ЛА 17 и цВППл направляются в электронно-вычислительную машину 4 и задатчик фазовых координат ВППл, цВППл 5, в СОН 2 используется огонь ЛА 13 для минимизации погрешности определения относительных координат ЛА и уменьшения объема вычислений;
- ЭВМ 4 вычисляет линейные фазовые координаты ЛА (Хв, Yв, Zв) в земной системе координат, как сумму измеренных в (X, Y, Z) {переносных} фазовых координат цВППл и относительных фазовых координат ЛА (ξв, ηв, ςв), измеренных СОН 2;
- при посадке в автоматическом режиме данные об угловых фазовых координатах ЛА 17 получаем от его навигационной системы 12, а при посадке в пилотируемом и автоматическом режимах используются цифровые данные авиагоризонта, направляемые приемопередатчиком на ЭВМ 4 система посадки ЛА на корабль для построения КИП 9.1 и 9.2.
Система посадки ЛА на корабль обеспечивает цифровой информацией все параметры физического процесса посадки ЛА 17 на корабль 20 в автоматическом и пилотируемом режимах.
Система посадки ЛА на корабль в цифровом виде, определяет:
- траекторию движения цВППл и угловые параметры ВППл;
- относительные фазовые координаты цВППл и ЛА;
- линейные фазовые координаты ЛА в земной системе координат;
- минимальную, максимальную и текущую высоту ВППл над уровнем моря;
- высоту ЛА над морской поверхностью, расстояния от ЛА до ВППл, цВППл и ангара;
- траекторию движения ЛА в земной системе координат после действия индикаторов глиссады и курса до ВППл, что исключит при приближении к ВППл приводнения ЛА (более вероятного при работе одного двигателя) из-за зависимости управления ЛА от некомпенсированных вертикальных перемещений индикаторов глиссады и курса, установленных на ВППл;
- сдвиги KB в окрестности ВППл при вращении несущих винтов;
- угловые фазовые координаты ЛА определяются аппаратурой ЛА;
- управление ЛА по траектории в земной системе координат до ВППл осуществляется по алгоритму, согласующим скорость движения ЛА и фазы движения ВППл для оптимального преследования ЛА цВППл с последующим касанием.
По этой информации построение управления в автоматическом режиме для беспилотного летательного аппарата (БпЛА) и ЛА от начальной точки траектории ЛА от области окончания действия индикаторов глиссады и курса, координаты которой случайны, но известны (данные СПЦТ системы посадки), до движущихся ВППл и цВППл, текущие фазовые координаты которых измеряются в реальном времени, и известен признак момента причаливания (допустимое отклонении цены риска от С0, касание в точках траектории цВППл, в которых изменения скоростных параметров траектории цВППл и ВППл меньше изменения управляемых фазовых координат ЛА);
- при данных метеоусловиях, задача определения управления ЛА решается известными методами оптимального управления.
Программно-математическое обеспечение (ПМО) - существенная составная часть системы посадки - определяет оптимальное управление ЛА при любых СМУ для ЛА и БпЛА в пилотируемом и автоматическом режиме посадки, определяет зависимости цены риска посадки от параметров СМУ. Рассматриваются решения уравнений движения ЛА с ограниченным управлением, при случайных возмущениях, обусловленных атмосферной турбулентностью, сдвигами нестационарного вектора скорости KB, качкой корабля, которые нерегулярны и случайны, система посадки ЛА на корабль обеспечивает посадку по измерениям реализации случайного процесса, прогноз реализации среды посадки на каждом последующем шаге вычислений осуществляется по данным измерений реализации фазовых координат цВППл; время вычисления прогноза определяется ЭВМ 4 по фазовым переменным текущей точки траектории цВППл и опережает реакцию пилота.
В численных экспериментах определяется зависимость цены риска посадки от СМУ и силы, действующие на ЛА и БпЛА при причаливании. По этим данным определяется конструктивный облик аэрофинишера 18.2 ЛА, компенсирующий необратимые воздействия ВППл на ЛА (палубный резонанс, перехлест несущих винтов (НВ) при остановке вращения, необратимые деформации шасси) при причаливании. Модельные расчеты дадут предельные СМУ, при которых допустима посадка для данного аэрофинишера 18.2 (трение о палубу, механические ступеньки в виде сетки и т.п.), а также определят управление ЛА и облик аэрофинишера в чрезвычайных ситуациях (например, неблагоприятное изменение СМУ во время полета), расчеты на моделях ЛА дадут данные о С (S, Y) и силах, действующие на ЛА после касания при причаливании. Порывы и сдвиги ветра, турбулентность, всплеск качки рассматриваются, как выброс случайных процессов и учтены в алгоритмах ПМО.
Полученные траектории и управления могут использоваться при подготовке методики пилотируемой посадки. Решение задачи оптимального управления посадки ЛА и летная практика определят границы допустимости посадки в СМУ, с заданной ценой риска, для данного типа корабля и ЛА, определят оптимальный тип посадки: сходу, либо с определенной паузой, а также определят на периоде характерного времени движения ВППл оптимальные точки безопасной посадки G и позволят определить возможность безопасной посадки, при данных характеристиках среды посадки, и при необходимости дать рекомендации на маневр корабля для получения допустимых условий посадки. Данных системы для построения оптимального автоматического управления посадкой ЛА 14 достаточно.
Для посадки пилотом ЛА 17 и оператором посадки БпЛА построен корабельный индикатор посадки КИП 9.1. и 9.2, индицирующий на плоском экране физический пространственно-временной процесс посадки (может располагаться на дисплее, на лобовом стекле ЛА, на нашлемном индикаторе, на стене ангара при использовании электролюминоформных матричных экранов). Поскольку переменных, описывающих процесс посадки много (вектор состояния среды посадки и вектор параметров состояния ЛА), время оптимальной посадки соизмеримо с характерным временем среды посадки, то КИП 9.1 и 9.2 должен отображать картину посадки в 3D видеоряде с ракурсом, удобным пилоту для обозрения параметров, необходимых для данной фазы посадки.
На КИП 9.1 и 9.2 индицируется ЛА 17, символ которого на КИП 9.1 соответствует линейными координатами ЛА 17 в земной системе координат, угловые координаты ЛА 17 индицируются авиагоризонтом (углы αв - крена, βв - скольжения и γв - тангажа), центр которого помещен в символ ЛА 17. Угловые координаты ВППл индицируются по аналогии с авиагоризонтом (α - угол бортовой качки, β - угол рыскания по курсу и γ - угол дифферента корабля), центр которого помещен в цВППл и назовем такой индикатор аквагоризонтом (см. фиг. 2), угловые координаты ЛА индицируются индикатором аквагоризонта, учитывающие силы тяжести ЛА, СМУ, параметры поля "кажущегося" ветра (углы αв - крена, βв - скольжения и γв - тангажа), где индекс в - учет порывов ветра),
На большом расстоянии до корабля (сотни метров) картина процесса посадки дается на КИП 9.1 и 9.2 в ренессансной перспективе, при приближении ЛА 17 к кораблю 20 ренессансная перспектива переходит в аксонометрическую, в которой изображается ВППл с ангаром. При достижении ЛА 17 границы области допустимой посадки G на траектории цВППл (пилоту индицируется на КИП 9.2 в 3D видеоряде относительное пространственное положение и относительные скорости ЛА, ВППл и цВППл) индикация символа цВППл изменяет цвет, например, цвет с коричневого на зеленый мигающий, при этом пилот (оператор посадки) устремляет ЛА 17 к цВППл (индикация фазовых относительных координат ЛА и цВППл дается на КИП в виде векторов численно в относительных координатах), угловые параметры ЛА совмещает с угловыми параметрами ВППл (этап выравнивания) при приближении ЛА к цВППл (этап выдерживания) символ цВППл светится непрерывно и в этот момент выполняется и совмещение углов авиагоризонта и аквагоризонта касание шасси ЛА 17 и ВППл (конец воздушного этапа ЛА), далее торможение ЛА 17 на ВППл финишером - конец этапа причаливания. При пропуске пилотом области допустимой посадки выполняется повторная попытка посадки. При этом цвет символа цВППл становится исходным и непрерывным. Индикация на КИП параметров KB, аквагоризонта, места и момента причаливания длится прерывно до окончания причаливания при любом числе попыток не зависимо от положения вертолета.
Индикация движения ЛА 17 по траектории, заданной в земной системе координат после действия индикаторов глиссады и курса до среза ВППл, осуществляется преследованием на КИП 9.2. символа ЛА 17 и символа цВППл.
Система посадки ЛА на корабль строит навигатор для ЛА и при уходе с маршрута посадки ЛА управление ведет ЛА по приближению к траектории цВППл, управление устремляет ЛА к цВППл, координаты которого известны в реальном времени и учет влияния ветра происходит автоматически.
В любой точке траектории цВППл цена риска С (S, Y) может достигать минимального значения С0, когда траектория движения ЛА проходит над ВППл, а ЛА сманеврирует и достигнет тех же фазовых координат, что и ВППл, и цВППл. Но управление ЛА ограничено и ЛА не всегда сможет из любой точки траектории сманеврировать и коснуться ВППл с минимальной ценой риска С (S, Y) (даже если среда посадки допускает устойчивое положение ЛА на ВППл в цВППл). Поэтому траектория движения ЛА должна приближаться к траектории цВППл, точки которой будут точками посадки G (допустимая цена риска), у которых динамика параметров среды посадки обладает крутизной меньшей, чем маневренность ЛА.
Для уверенности пилота необходимо разработать для чрезвычайных ситуаций управление ЛА с критической ценой риска. Действие сил на ЛА при причаливании определяется в модельных расчетах и позволит определить конструктивный облик финишера для различных CG. Поскольку вклад в цену риска посадки отклонения yk от sk для различных k различен и определяется параметрами движения ЛА и механизмами удерживания на ВППл, то в реальную цену риска необходимо ввести весовые коэффициенты для всех к (они должны быть определены в задаче воздействия ВППл на ЛА при расчетах на моделях ЛА).
Одними из основных параметров причаливания являются отклонения фазовых координат центра шасси ЛА от цВППл, поэтому управление конечного этапа посадки - касания цВППл выполняется в относительных координатах для уменьшения погрешности координат точки касания и цены риска посадки. Угловые слагаемые в цене риска посадки составляются, как разности величин аквагоризонта и авиагоризонта.
Оптимальная конструкция финишера для предельных параметров СМУ определяется по его воздействиям на ЛА, которые обеспечивают сохранение функциональных характеристик ЛА и по этим воздействиям, решая обратную задачу, построить конструктивный облик финишера (см. фиг. 3). Если посадка невозможна при данных метеоусловиях (для всех G), что до попытки посадки определяется из расчетов, то системы посадки ЛА на корабль дает рекомендации на изменение курса и скорости движения и качки корабля, при которых посадка возможна.
Технико-экономическим достоинством предложенного технического решения является повышение безопасности посадки ЛА на ВППл авианесущих кораблей из области окончания действия индикаторов глиссады и курса, либо при использовании ЛА автономной инерциальной системы, до момента причаливания ЛА на цВППл в автоматическом и пилотируемом режимах, причем в СМУ с минимальной ценой риска посадки и определения предельных значений параметров метеоусловий и определения облика финишера и аэрофинишера при безопасной посадки для данного типа корабля и ЛА.
Все составные части системы посадки ЛА на корабль изучены, освоена технология и изготовление отечественной промышленностью.



Система посадки летательного аппарата (ЛА) на корабль с применением цифровых технологий содержит корабельное оборудование и оборудование на борту ЛА. Корабельное оборудование содержит навигационную систему, систему относительной навигации, систему метеорологического обеспечения корабля для измерения набегающего на корабль вектора скорости ветра, дистанционный измеритель параметров ветра, ЭВМ с программно-математическим обеспечением, задатчик фазовых координат ВППл и цВППо и относительных фазовых координат цВППл и ЛА, а также момента касания ЛА ВППл, задатчик параметров поля вектора скорости ветра, задатчик параметров среды посадки, приемопередатчик, индикатор посадки ЛА, систему управления посадкой ЛА, корабельную часть финишера, систему управления авианесущим кораблем. Бортовое оборудование ЛА содержит приемопередатчик, индикатор посадки ЛА, ЭВМ ЛА, задатчик цифрового индикатора авиагоризонта ЛА, навигационную систему ЛА, источник света, задатчик параметров управления ЛА при автоматической посадке, систему управления ЛА, бортовую часть аэрофинишера. Обеспечивается повышение точности захода ЛА на посадку в зону видимости сигнала стандартных визуальных корабельных систем посадки в сложных метеоусловиях при обеспечении безопасности эксплуатации вертолетов палубного базирования. 2 з.п. ф-лы, 4 ил.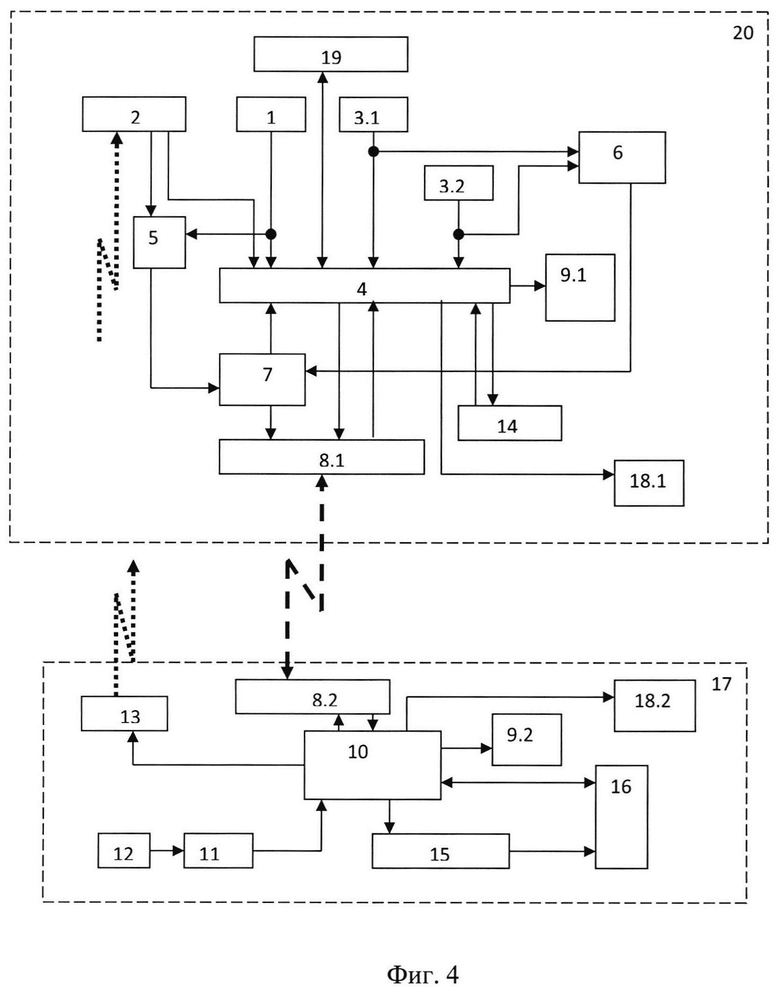
1. Система посадки летательного аппарата (ЛА) на корабль с применением цифровых технологий, содержащая навигационную систему корабля, систему метеорологического обеспечения корабля в окрестности взлетно-посадочной площадки, подключенные к электронно-вычислительной машине (вычислительному модулю), соединенного шиной связи с системой управления корабля, приемо-передатчиком корабля, при этом установлен радиоканал связи с приемо-передатчиком ЛА, который соединен через электронно-вычислительную машину (вычислительный модуль) ЛА с системой управления ЛА, а также навигационная система ЛА, отличающаяся тем, что введен световой индикатор на ЛА, сигнал которого принимает система относительной навигации корабля для создания точного положения места посадки ЛА, при этом система относительной навигации и навигационная система корабля, а также система метеорологического обеспечения корабля и дистанционного измерителя параметров ветра соединены, соответственно, через задатчик относительных фазовых координат центра взлетно-посадочной площадки (цВППл) и ЛА, а также через задатчик параметров поля вектора скорости ветра с задатчиком параметров среды посадки, подключенного к соответствующим входам приемо-передатчика корабля и вычислительного модуля, связанного с системой управления посадкой ЛА, корабельным индикатором посадки ЛА корабля, причем вычислительный модуль ЛА связан соответственно с корабельным индикатором посадки ЛА на борту ЛА и через задатчик параметров управления ЛА при автоматической посадке с системой управления ЛА, при этом навигационная система ЛА связана через задатчик цифрового индикатора авиагоризонта ЛА с соответствующим входом вычислительного модуля ЛА, кроме того введены корабельный финишер и бортовой аэрофинишер ЛА, связанные, соответственно, с вычислительными модулями корабля и ЛА.
2. Система посадки ЛА на корабль с применением цифровых технологий по п. 1, отличающаяся тем, что для пилотируемой посадки ЛА строятся корабельные индикаторы, где индицируется на плоском экране трехмерный физический процесс посадки, движение ВППл и места посадки в реальном времени в графической информации рендеринга: аквагоризонт - угловые координаты ВППл в символе цВППл, авиагоризонт - угловые координаты ЛА в символе ЛА, положения символов ЛА и цВППл на корабельном индикаторе посадки соответствуют координатам цВППл и ЛА в земной системе координат, корабельный индикатор посадки отображает картину посадки в 3D видеоряде с ракурсом, удобным пилоту и оператору посадки для обозрения параметров, необходимых для данной фазы операции посадки.
3. Система посадки ЛА на корабль по пп. 1, 2, отличающаяся тем, что посадка ЛА на ВППл происходит при совмещении индикаций аквагоризонта и авиагоризонта на корабельных индикаторах посадки по цветовым сигналам аквагоризонта, например, коричневый цвет центра аквагоризонта меняется, например, на мигающий зеленый при приближении символа цВППл к оптимальной точке посадки, при этом выполняется выравнивание углов ЛА по углам аквагоризонта при приближении центра авиагоризонта к центру аквагоризонта, далее мигающий зеленый переходит в непрерывный зеленый и производится совмещение символа авиагоризонта и аквагоризонта и осуществляется касание, при пропуске касания цвет символа цВППл становится исходным и непрерывным, причем индикация процесса посадки длится непрерывно до реализации касания при любом числе попыток независимо от положения ЛА.
| 0 |
|
SU190804A1 | |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| Способ осенне-зимнего и весеннего содержания пчелосемей и устройство для осуществления этого способа | 1958 |
|
SU120077A1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОСАДКОЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2518434C2 |
| US 0009139307 B2, 22.09.2015. | |||

