Технические решения относятся к области высокоточных геодезических измерений, а именно к способам и устройствам получения, обработки и отображения геопространственной информации, компьютерным средствам преобразования с применением высокоточной технологии компьютерного зрения, и могут быть использованы в автоматизированных системах дистанционного определения пространственного положения элементов инженерных или природных объектов относительно горизонта для ведения непрерывного геодезического мониторинга деформационных процессов конструкций инженерных сооружений, таких как плотины ГЭС, камеры шлюзов, мосты, нефтепроводы и газопроводы, нефтяные и газовые скважины или элементов природных объектов, таких как земляные дамбы, насыпи, зоны селевых потоков, промышленные карьеры, участки интенсивной добычи полезных ископаемых, в режиме реального времени, с целью определения кренов конструкций инженерных сооружений, предиктивной диагностики целостности сооружений, оперативного обнаружения первичных признаков потери устойчивости сооружения и выработки четких превентивных управляющих решений для предотвращения аварийных ситуаций на контролируемом объекте, инженерном или природном (далее - контролируемый объект).
Известен способ по авт. св. СССР №1420370, МПК G01C 9/24 (2000.01), опубл. 30.08.1988, взятый в качестве аналога. Сущность данного способа измерения угла наклона контролируемого объекта относительно горизонта заключается в том, что устанавливают на контролируемом объекте пузырьковую ампулу, помещают ее в электрическое поле и по изменению параметра этого поля определяют угол наклона контролируемого объекта, при этом в самой ампуле возбуждают импульсное электромагнитное поле бегущей волны, измеряют отраженный сигнал, а определение угла наклона контролируемого объекта осуществляют по величине или времени прихода отраженного сигнала.
Общими признаками предлагаемого технического решения и аналога являются: способ высокоточного определения углов наклона контролируемого объекта (в аналоге - способ измерения угла наклона объекта относительно горизонта), измерение с помощью устройства на основе уровня пузырькового типа, закрепленного на элементах конструкций контролируемого объекта, относительных смещений свободно плавающего по поверхности мениска газового пузырька в жидкости, замкнутых в полости осесимметричной капсулы, определение пространственного изменения положения светового пятна пузырька в полости капсулы относительно оси симметрии капсулы, сравнение полученных данных результатов измерений между собой, регистрация данных в виде направления и величины наклона контролируемого объекта (в аналоге - устанавливают на контролируемом объекте пузырьковую ампулу, помещают ее в электрическое поле и по изменению параметра этого поля определяют угол наклона контролируемого объекта, при этом в самой ампуле возбуждают импульсное электромагнитное поле бегущей волны, измеряют отраженный сигнал, а определение угла наклона контролируемого объекта осуществляют по величине или времени прихода отраженного сигнала).
Основным недостатком данного способа является отсутствие прямого измерения отклонения контролируемого объекта с одновременным прямым преобразованием направления и величины наклона контролируемого объекта в электрический сигнал, что не позволяет использовать его в системах дистанционного определения пространственного положения контролируемых объектов относительно горизонта для ведения непрерывного геодезического мониторинга деформационных процессов конструкций инженерных сооружений в режиме реального времени в условиях экстремально низких температур окружающей среды.
Известен способ по патенту РФ №2655024, МПК G01C 9/06 (2006.01), G01C 9/24 (2006.01), опубл. 23.05.2018 г. в БИ №15, взятый в качестве прототипа. Сущность данного способа заключается в том, что для измерения угла наклона контролируемого объекта в системах визуального и электронного дистанционного определения пространственного положения контролируемого объекта относительно горизонта уровнями пузырькового типа одновременно с визуальным измерением смещения свободно плавающего по вогнутой поверхности мениска газового пузырька в жидкости измеряют фототоки от светового пятна пузырька и поляризационные токи от его пространственного положения в полости, а затем сравнивают между собой с помощью пленочных фоторезисторов. Тем самым угол наклона контролируемого объекта определяют с визуальным измерением и одновременным преобразованием в электрический сигнал направления и величины наклона контролируемого объекта.
Общими признаками предлагаемого технического решения и прототипа являются: способ высокоточного определения углов наклона контролируемого объекта (в прототипе - способ измерения угла наклона объекта), с помощью устройства на основе уровня пузырькового типа, закрепленного на элементах конструкций контролируемого объекта, измеряют относительные смещения свободно плавающего по поверхности мениска газового пузырька в жидкости, замкнутого в полости осесимметричной капсулы при отклонении ее оси симметрии относительно отвесной линии, при этом центр шкалы находится на оси симметрии капсулы, определяют пространственные изменения положения светового пятна пузырька в полости капсулы относительно оси симметрии капсулы, полученные данные результатов измерений сравнивают между собой и регистрируют в виде направления и величины наклона контролируемого объекта.
Основным недостатком данного способа является невозможность использования его в средствах автоматизации измерительного процесса, в системах дистанционного определения пространственного положения контролируемых объектов относительно горизонта для ведения непрерывного геодезического мониторинга деформационных процессов конструкций инженерных сооружений в режиме реального времени в условиях экстремально низких температур окружающей среды, так как угол наклона контролируемого объекта, преобразованного в электрический сигнал, определяют визуальным измерением с одновременным определением направления и величины наклона контролируемого объекта только в индикаторной форме.
Известно устройство по авт. св. СССР №1420370, МПК G01C 9/24 (2000.01), опубл. 30.08.1988, взятое в качестве аналога. Сущность данного устройства для измерения угла наклона контролируемого объекта относительно горизонта заключается в том, что устанавливают на контролируемом объекте пузырьковую ампулу, которая содержит размещенные на ее поверхности два электрода и подключенный к ним блок питания и измерения, при этом электроды выполнены в виде проводников, расположенных вдоль поверхности пузырьковой ампулы и образующих с нею линию передачи с распределенными параметрами, а блок питания и измерения выполнен в виде импульсного СВЧ-рефлектора, подключенного к одной паре концов обоих проводников, и согласованного нагрузочного сопротивления, подключенного к другой паре концов этих проводников. Помещают устройство в электрическое поле и по изменению параметра этого поля определяют угол наклона контролируемого объекта, при этом в ампуле возбуждают импульсное электромагнитное поле бегущей волны, измеряют отраженный сигнал, а определение угла наклона контролируемого объекта осуществляют по величине или времени прихода отраженного сигнала.
Общими признаками предлагаемого технического решения и аналога являются: устройство для высокоточного определения углов наклона контролируемого объекта (в аналоге - устройство измерения угла наклона объекта относительно горизонта), устройство содержит электрически связанные между собой измерительный модуль, включающий измерительный блок на основе уровня пузырькового типа и модуль получения данных результатов измерений углов наклона контролируемого объекта (в аналоге - устройство содержит пузырьковую ампулу, устанавливаемую на контролируемом объекте в процессе измерения, блок питания и измерения).
Основным недостатком данного устройства является сложность конструкции, отсутствие прямого измерения положения газового пузырька в ампуле, соответствующее отклонению контролируемого объекта и отсутствие одновременного прямого преобразования направления и величины наклона контролируемого объекта в электрический сигнал, что не позволяет использовать это устройство в системах дистанционного определения пространственного положения контролируемых объектов относительно горизонта для ведения непрерывного геодезического мониторинга деформационных процессов конструкций инженерных сооружений в режиме реального времени в условиях экстремально низких температур окружающей среды.
Известны измерительные геодезические приборы на основе уровня пузырькового типа, например прецизионное оптическое устройство «Квадрант» [Квадрант оптический КО-10. Паспорт АЛ 2.787.046 ПС - 2007, ОАО «Новосибирский приборостроительный завод»], взятое в качестве аналога. Сущность данного устройства заключается в том, что его оптико-электронный измерительный блок, который имеет высокую чувствительность, устанавливают на контролируемом объекте совместно со штативом, который служит основой для установления истинной горизонтали или вертикали на основе уровня пузырькового типа, с прямым визуальным измерением, дающим наглядность в определении направления и величины наклона контролируемого объекта.
Общими признаками предлагаемого технического решения и аналога являются: устройство для высокоточного определения углов наклона контролируемого объекта при геодезическом мониторинге (в аналоге - измерительный геодезический прибор на основе уровня пузырькового типа), устройство содержит электрически связанные между собой измерительный модуль, включающий оптико-электронный измерительный блок на основе пузырькового уровня; модуль получения данных результатов измерений углов наклона контролируемого объекта (в аналоге - устройство содержит электрически связанные между собой измерительный модуль, включающий оптико-электронный измерительный блок на основе уровня пузырькового типа; модуль получения данных результатов измерений углов наклона контролируемого объекта).
Основным недостатком данного устройства является невозможность преобразования направления и величины наклона контролируемых объектов в электрический сигнал и, как следствие, невозможность использования его в средствах автоматизации измерительного процесса с одновременным прямым преобразованием направления и величины наклона контролируемого объекта в электрический сигнал, что не позволяет использовать это устройство в системах дистанционного определения пространственного положения контролируемого объекта относительно горизонта для ведения непрерывного геодезического мониторинга деформационных процессов конструкций инженерных сооружений в режиме реального времени в условиях экстремально низких температур окружающей среды. Кроме того, такое устройство имеет ограниченный диапазон измерения угла наклона, а субъективные зрительное восприятие и ракурс при работе с этим устройством увеличивают погрешность измерения, особенно в условиях экстремально низких температур окружающей среды.
Известно устройство по патенту РФ №2419071, МПК G01C 9/00 (2006.01), опубл. 25.05.2011 г. в Бюл. №14, взятое в качестве аналога. Сущность данного устройства заключается в том, что для измерения угла наклона контролируемого объекта относительно горизонта используют видеонаклономер, содержащий сосуд с жидкостью, над которой установлены оптически связанные друг с другом и с поверхностью жидкости объектив, светоделительный элемент, источник света и позиционно-чувствительный фотоприемник, формирующий видеосигнал с видеокадрами, при этом между объективом и поверхностью жидкости установлено зеркало с круглым окном, центр которого лежит на оптической оси объектива, зеркало закреплено под углом к основанию сосуда так, чтобы два изображения источника света в видеокадре, первое - отраженное от поверхности жидкости и второе - отраженное от зеркала, не накладывались друг на друга во всем диапазоне измерений, при этом диаметр окна в зеркале определяется по соответствующей формуле. Зеркало закреплено под углом наклона к основанию видеонаклономера так, что изображение от зеркала располагается, например, в углу видеокадра. При этом оно остается неподвижным, независимо от наклонов основания сосуда с жидкостью. В исходном состоянии, когда сосуд установлен на горизонтальной поверхности, изображение от поверхности жидкости располагается в центре видеокадра. При наклонах контролируемой поверхности первое изображение перемещается в видеокадре так, что расстояние между ним и вторым фиксированным изображением находится в строгой зависимости от искомого угла наклона контролируемой поверхности, что и служит основанием для выполнения измерений. Измерения осуществляются на основе компьютерной обработки видеосигнала позиционно-чувствительного приемника, содержащего первое изображения и второе изображение. При этом важно, чтобы яркость этих изображений в видеокадре была одинаковой.
Общими признаками предлагаемого технического решения и аналога являются: устройство для высокоточного определения углов наклона контролируемого объекта (в аналоге - видеонаклономер), устройство содержит электрически связанные между собой измерительный модуль, включающий оптико-электронный измерительный блок на основе уровня пузырькового типа (в аналоге - устройство содержит сосуд с жидкостью), источником излучения (в аналоге - источник света) и детектор в виде цифровой видеокамеры (в аналоге - позиционно-чувствительный фотоприемник, формирующий видеосигнал с видеокадрами), модуль получения данных результатов измерений углов наклона контролируемого объекта на основе компьютерной обработки видеосигнала.
Основным недостатком данного устройства является ограниченность использования его в средствах автоматизации измерительного процесса, в системах дистанционного определения пространственного положения контролируемого объекта относительно горизонта для ведения непрерывного геодезического мониторинга деформационных процессов конструкций инженерных сооружений в режиме реального времени в условиях экстремально низких температур окружающей среды, так как угол наклона контролируемого объекта, преобразованного в видеосигнал, определяют только фиксацией направления и величины наклона контролируемого объекта в индикаторной форме. Наличие источника света в оптической системе видеонаклономера при нестабильности уровня освещенности создает дополнительную погрешность и, тем самым, снижает точность измерения, а значит, точность работы устройства в целом. Также применение сосуда с жидкостью, с требуемым коэффициентом отражения поверхности жидкости (чтобы яркость двух изображений в видеокадре была одинаковой), над которой установлены оптически связанные друг с другом и с поверхностью жидкости объектив, светоделительный элемент, по причине сложности исполнения оптической части конструкции, существенно увеличивает вероятность дополнительной погрешности и, тем самым, снижает точность измерения, а значит, точность работы устройства в целом. Прецизионность изготовления, обязательная предварительная настройка оптической части конструкции в полевых условиях после транспортировки, из-за требований к точности измерений, существенно снижает эксплуатационные качества данного устройства в полевых условиях, в условиях экстремально низких температур окружающей среды. Кроме того, сложность конструкции оптической части данного устройства приводит к увеличению стоимости оборудования в целом.
Известно устройство по патенту РФ №2655024, МПК G01C 9/06 (2006.01), G01C 9/24 (2006.01), опубл. 23.05.2018 г. в БИ №15, взятое в качестве прототипа. Сущность данного устройства заключается в том, что для измерения угла наклона контролируемого объекта относительно горизонта уровнями пузырькового типа одновременно с визуальным измерением смещения свободно плавающего по вогнутой поверхности мениска газового пузырька в жидкости измеряют фототоки от светового пятна пузырька и поляризационные токи от его пространственного положения в полости, а затем сравнивают между собой с помощью пленочных фоторезисторов, выполненных в виде четырех конгруэнтных круговых квадрантов, и оптически прозрачных пленочных электродов, выполненных в виде четырех конгруэнтных сферических треугольников так, что их проекции на основание совпадают с круговыми квадрантами пленочных фоторезисторов и образуют обкладки четырех конденсаторов. При этом два противолежащих пленочных электрода и два противолежащих пленочных фоторезистора, биссектрисы центральных углов которых коллинеарны одной из ортогональных осей координат, электрически связаны между собой и источником питания в измерительный мост, измерительная диагональ которого электрически связана с соответствующим каналом индикатора. Тем самым угол наклона контролируемого объекта определяют с визуальным измерением и одновременным преобразованием в электрический сигнал направления и величины наклона контролируемого объекта.
Общими признаками предлагаемого технического решения и прототипа являются: устройство для высокоточного определения углов наклона контролируемого объекта (в прототипе - устройство измерения угла наклона), устройство содержит электрически связанные между собой измерительный модуль, включающий оптико-электронный измерительный блок на основе уровня пузырькового типа (в прототипе - устройство содержит газовый пузырек с жидкостью, замкнутые в полости осесимметричной дискообразной капсулы, состоящей из основания и оптически прозрачного мениска, герметично связанных по периметру между собой), с детектором (в прототипе - четыре пленочных фоторезистора, четыре оптически прозрачных пленочных электрода), источник излучения (в прототипе - источник излучения, выполненный в виде кольца и оптически связанный по периметру мениска с круговой шкалой, радиально-концентрические линии которой выполнены в виде светорассеивающих бороздок), модуль получения данных результатов измерений углов наклона контролируемого объекта (в прототипе - фоторезисторы электрически связаны между собой и источником питания в измерительный мост, измерительная диагональ которого электрически связана с соответствующим каналом индикатора).
Основным недостатком данного устройства является ограниченность использования его в средствах автоматизации измерительного процесса, в системах дистанционного определения пространственного положения контролируемых объектов относительно горизонта для ведения непрерывного геодезического мониторинга деформационных процессов конструкций инженерных сооружений в режиме реального времени в условиях экстремально низких температур окружающей среды, так как угол наклона контролируемого объекта, преобразованного в электрический сигнал, определяют визуальным измерением с одновременным определением направления и величины наклона контролируемого объекта только в индикаторной форме. Также применение уровня пузырькового типа в виде капсулы круглой формы требует высокой оптической точности изготовления круглых пузырьковых уровней и снижает диапазон измеряемых углов наклона контролируемого объекта в условиях экстремально низких температур окружающей среды. Наличие источника питания в измерительной цепи за счет нестабильности уровня заряда создает дополнительную погрешность и, тем самым, снижает точность измерения, а значит, точность работы устройства в целом, особенно в условиях экстремально низких температур окружающей среды, а значит, существенно снижается эффективность работы данного устройства.
Решаемые технические проблемы заключаются в повышении эффективности и надежности способа за счет повышения точности и оперативности доступа к представляемой информации для анализа и оценки состояния контролируемого объекта в режиме реального времени в условиях экстремально низких температур окружающей среды, а также в повышении эффективности и надежности устройства за счет повышения точности измерения и расширения его функциональных возможностей на прием и обработку получаемых результатов измерений, то есть, автоматизации процесса геодезического мониторинга путем применения устройства интерфейсно-модульного исполнения предложенной конструкции с измерительным модулем и модулем получения данных результатов измерений с возможностью обработки получаемых результатов измерений посредством цифровой технологии компьютерного зрения, что позволяет повысить объем информации и скорость доступа к ней, то есть повысить достоверность получаемых геодезических данных для анализа и оценки состояния элементов контролируемого объекта относительно их проектных значений, а значит - его эффективность и надежность.
Технические результаты заключаются в повышении точности способа определения углов наклона контролируемого объекта при геодезическом мониторинге за счет повышении точности измерения относительных смещений свободно плавающего по поверхности мениска газового пузырька в жидкости, замкнутого в полости осесимметричной капсулы при отклонении ее оси симметрии относительно отвесной линии в уровнях пузырькового типа и оперативности доступа к представляемой информации для анализа и оценки состояния контролируемого объекта в режиме реального времени в условиях экстремально низких температур окружающей среды относительно их проектных значений, а также в повышении точности измерения устройства за счет повышении точности измерения положения газового пузырька в пузырьковых уровнях и расширения его функциональных возможностей на прием и обработку получаемых результатов измерений путем расширения рабочего диапазона измерений в диапазоне сверхмалых углов наклона контролируемого объекта, а также путем увеличения объема информации и скорости доступа к ней, то есть, в повышении достоверности получаемых геодезических данных для анализа и оценки состояния элементов контролируемого объекта относительно их проектных значений, то есть, автоматизации процесса геодезического мониторинга в режиме реального времени в условиях экстремально низких температур окружающей среды.
Поставленная техническая проблема решается тем, что в способе высокоточного определения углов наклона контролируемого объекта, при геодезическом мониторинге посредством технологии компьютерного зрения в режиме реального времени в условиях экстремально низких температур окружающей среды, при котором с помощью устройства на основе уровня пузырькового типа, закрепленного на элементах конструкций контролируемого объекта, измеряют относительные смещения свободно плавающего по поверхности мениска газового пузырька в жидкости, замкнутого в полости осесимметричной капсулы при отклонении ее оси симметрии относительно отвесной линии, при этом центр шкалы находится на оси симметрии капсулы, определяют пространственные изменения положения светового пятна пузырька в полости капсулы относительно оси симметрии капсулы, полученные данные результатов измерений сравнивают между собой и регистрируют в виде направления и величины наклона контролируемого объекта, согласно техническому решению на контролируемом объекте предварительно создают деформационную геодезическую сеть, представляющую собой опорные пункты, включающие геодезические реперы для геодезического мониторинга контролируемого объекта, в режиме реального времени в условиях экстремально низких температур окружающей среды. На каждом опорном пункте, включающем геодезический репер, оснащенный устройством на основе уровня пузырькового типа, выполняют измерения относительных смещений свободно плавающего по поверхности мениска газового пузырька в спиртовой жидкости в упомянутом уровне с помощью детектора, выполненного в виде цифровой видеокамеры. Данные результатов измерений пространственного положения светового пятна газового пузырька в полости капсулы получают в виде предварительного цифрового потокового видеоизображения текущего положения газового пузырька в спиртовой жидкости в упомянутом уровне относительно его начального положения, которое передают в модуль получения данных результатов измерений, выполненный в виде регистрирующей станции пользователя на базе персонального компьютера с общим и прикладным программным обеспечением (далее - ПК с общим и прикладным ПО) с возможностью сбора, хранения, обработки предварительного цифрового потокового видеоизображения посредством алгоритмов технологии компьютерного зрения путем цифрового автоматического сравнения координат углов вспомогательных прямоугольников в системе координат цифрового видеоснимка, описывающего текущее положение газового пузырька в упомянутых уровнях, с координатами углов этого прямоугольника, полученных на предыдущей эпохе наблюдения (предыдущем кадре цифрового видеоснимка) и автоматического преобразования посредством алгоритмов машинного обучения полученных цифровых значений относительных изменений координат вспомогательного прямоугольника, описывающего соответствующие положения газового пузырька в упомянутых уровнях в высокоточные значения, продольных по оси X и поперечных по оси Y, углов наклона контролируемого объекта, при геодезическом мониторинге в режиме реального времени в условиях экстремально низких температур окружающей среды.
Указанная совокупность существенных признаков предлагаемого технического решения позволяет повысить эффективность и надежность способа за счет повышения точности измерения в реперной точке контролируемого объекта относительных смещений положения газового пузырька в пузырьковых уровнях предложенной конструкции путем обеспечения стабильности пространственного положения оптической оси объектива цифровой видеокамеры, относительно осей симметрии капсул в пузырьковых уровнях предложенной конструкции и цифровой фиксации положения газового пузырька с помощью цифровой видеокамеры, а также организации в режиме реального времени геодезического мониторинга посредством электрических, цифровых и программно-логических модулей и каналов связи, позволяющих получать достаточный объем данных, то есть, достоверные результаты измерений и за счет оперативности доступа к представляемой информации для анализа и оценки состояния контролируемого объекта путем автоматического получения и передачи в режиме реального времени полученных результатов измерений в виде предварительного цифрового потокового видеоизображения на регистрирующую станцию пользователя на базе ПК с общим и прикладным ПО, с возможностью сбора, хранения и обработки предварительного цифрового потокового видеоизображения посредством технологии компьютерного зрения, а также снижению зависимости от человеческого фактора, то есть, исключению субъективности при автоматическом получении результатов измерений и их сравнении посредством высокоточных алгоритмов программы компьютерного зрения для проведения автоматизированного мониторинга в режиме реального времени, что в конечном счете позволяет повысить точность (достоверность) получаемых данных, а значит - эффективность и надежность геодезического мониторинга при определении пространственного положения (крена) относительно горизонта контролируемого объекта.
Поставленная техническая проблема решается также тем, что в устройстве для высокоточного определения углов наклона контролируемого объекта, при геодезическом мониторинге посредством технологии компьютерного зрения в режиме реального времени в условиях экстремально низких температур окружающей среды, реализующее способ по п. 1 формулы, содержащее электрически связанные между собой измерительный модуль, включающий оптико-электронный измерительный блок на основе уровня пузырькового типа, с детектором и источником излучения, а также модуль получения данных результатов измерений углов наклона контролируемого объекта, согласно техническому решению указанный измерительный модуль дополнительно снабжен интерфейсным блоком приема-передачи цифровых данных и выполнен в едином корпусе с возможностью закрепления в заранее выбранных реперных точках на контролируемом объекте, создающих собой опорные пункты деформационной геодезической сети, включающей геодезические реперы для геодезического мониторинга контролируемого объекта, в режиме реального времени в условиях экстремально низких температур окружающей среды. Указанный модуль получения данных результатов измерений выполнен в виде регистрирующей станции пользователя на базе ПК с общим и прикладным ПО, предназначенной для сбора, хранения, обработки предварительного цифрового потокового видеоизображения и определения высокоточных значений, продольных по оси X и поперечных по оси Y, углов наклона контролируемого объекта, посредством технологии компьютерного зрения. При этом упомянутый детектор оптико-электронного измерительного блока, выполненный в виде цифровой видеокамеры, закреплен в верхней части указанного корпуса над площадкой, на которой закреплены четыре пузырьковых уровня, каждый из которых содержит газовый пузырек в спиртовой жидкости, герметично замкнутый в полости капсулы цилиндрической формы. Причем упомянутые пузырьковые уровни размещены парами, в каждой паре размещены пузырьковые уровни с различным радиусом кривизны капсул, соответственно, с различной ценой деления шкалы капсул и, соответственно, с различным диапазоном измерения углов. При этом указанные пары пузырьковых уровней закреплены в упомянутом корпусе, в рабочей оптической зоне цифровой видеокамеры, ортогонально друг другу по оси X и по оси Y в горизонтальной плоскости. Указанный источник излучения оптико-электронного измерительного блока выполнен в виде, по меньшей мере, двух светодиодов, расположенных над площадкой с закрепленными пузырьковыми уровнями для обеспечения освещенности, в рабочей оптической зоне цифровой видеокамеры, необходимой для видеофиксации относительных смещений газового пузырька в спиртовой жидкости пузырьковых уровней и последующего формирования предварительного цифрового потокового видеоизображения положения газового пузырька в указанных уровнях. Причем цифровая видеокамера оптико-электронного измерительного блока связана посредством электрической, цифровой программно-логической связи с программным блоком интерфейсного блока приема-передачи цифровых данных, который выполнен для обработки и получения предварительного цифрового потокового видеоизображения, управления цифровой видеокамерой, светодиодами, блоком зарядки и питания, датчиком температуры, блоком памяти и блоком связи для передачи цифровых данных. При этом интерфейсный блок приема-передачи цифровых данных включает программный блок, цифровой вход-выход которого электрически и программно-логически связан с блоком зарядки и питания, который выполнен в виде последовательно соединенных между собой посредством электрической и программно-логической связи источника питания, балансира зарядки суперконденсаторов с датчиком тока и напряжения и накопителя заряда, выполненного в виде, по меньшей мере, двух суперконденсаторов, последовательно соединенных между собой, другие цифровые входы-выходы программного блока соединены с цифровыми входами-выходами датчика температуры и цифровыми входами-выходами, связанных между собой электрически и программно-логически, блока памяти и блока связи для передачи цифровых данных, предназначенных для постоянной передачи или передачи по запросу (появлению связи) накопленной информации в виде предварительного цифрового потокового видеоизображения посредством цифровой программно-логической связи в программе упомянутого программного блока на регистрирующую станцию пользователя на базе ПК с общим и прикладным ПО, предназначенную для сбора, хранения, обработки предварительного цифрового потокового видеоизображения посредством алгоритмов технологии компьютерного зрения путем цифрового автоматического сравнения координат углов вспомогательных прямоугольников в системе координат цифрового видеоснимка, описывающего текущее положение газового пузырька в указанных уровнях, с координатами углов этого прямоугольника, полученных на предыдущей эпохе наблюдения (предыдущем кадре цифрового видеоснимка) и автоматического преобразования полученных цифровых значений посредством алгоритмов машинного обучения относительных изменений координат вспомогательного прямоугольника, описывающего соответствующие положения газового пузырька в упомянутых уровнях в высокоточные значения, продольных по оси X и поперечных по оси Y, углов наклона контролируемого объекта, при геодезическом мониторинге в режиме реального времени в условиях экстремально низких температур окружающей среды.
Указанная совокупность существенных признаков предлагаемого устройства позволяет повысить эффективность и надежность геодезического мониторинга при определении пространственного положения относительно горизонта контролируемого объекта в режиме реального времени при работе в полевых условиях, в условиях экстремально низких температур окружающей среды в результате повышения точности измерений при эксплуатации устройства за счет расширения рабочего диапазона измерений в диапазоне сверхмалых углов наклона контролируемого объекта путем повышения чувствительности оптико-измерительного блока с использованием пузырьковых уровней с разным диапазоном измерений, используемых в измерительном модуле выбранной конструкции и за счет повышения достоверности и оперативности доступа к представляемой информации для анализа и оценки состояния контролируемых элементов объектов путем использования устройства интерфейсно-модульного исполнения и организации автоматизированного процесса геодезического мониторинга посредством электрических, цифровых и программно-логических каналов связи, устранению зависимости от человеческого фактора при получении результатов измерений и их сравнении посредством алгоритмов высокоточной программы компьютерного зрения для проведения автоматизированного мониторинга, что в конечном счете позволяет повысить эффективность и надежность геодезического мониторинга при определении углов наклона контролируемого объекта в режиме реального времени в условиях температур от -40°С до +50°C.
Таким образом, предлагаемое техническое решение позволяет повысить эффективность и надежность геодезического мониторинга при определении пространственного положения относительно горизонта контролируемого объекта посредством технологии компьютерного зрения в режиме реального времени при работе в полевых условиях, в условиях экстремально низких температур окружающей среды за счет:
- расширения рабочего диапазона измерений измерительного модуля в диапазоне сверхмалых углов наклона контролируемого объекта путем использования оптико-электронного измерительного блока предложенной конструкции;
- расширения рабочего диапазона температур эксплуатации измерительного модуля путем использования спиртовых пузырьковых уровней и блока зарядки и питания предложенной конструкции;
- повышения достоверности и оперативности доступа к представляемой информации для анализа и оценки состояния элементов контролируемого объекта относительно их проектных значений путем использования технологии компьютерного зрения;
- повышения энергонезависимости устройства при эксплуатации в полевых условиях в процессе геодезического мониторинга в режиме реального времени в условиях экстремально низких температур окружающей среды от -40°С до +50°C путем использования блока зарядки и питания предложенной конструкции;
- устранения зависимости от человеческого фактора, то есть исключения субъективности при автоматическом получении результатов измерений и их сравнении посредством алгоритмов высокоточной системы компьютерного зрения для проведения автоматизированного геодезического мониторинга в режиме реального времени;
- повышения автономности работы устройства в режиме реального времени в условиях низких температур от -40°С до +50°C путем использования источника питания предложенной конструкции;
- снижения издержек на изготовление устройства путем использования унифицированных изделий для модулей и блоков в предлагаемом устройстве;
- снижения влияния на точность измерения углов наклона контролируемого объекта цилиндрическими пузырьковыми уровнями (из-за погрешностей в шлифовке внутренней поверхности капсул и изменения вязкости наполняющей жидкости при изменении температуры) за счет калибровки измерительных модулей с использованием алгоритмов машинного обучения высокоточной системы компьютерного зрения.
При эксплуатации предлагаемого устройства в режиме реального времени в полевых условиях путем использования в оптико-электронном измерительном блоке предложенной конструкции двух пар пузырьковых уровней в рабочей оптической зоне цифровой видеокамеры, ортогонально друг другу в горизонтальной плоскости достигается расширение рабочего диапазона измерений, так как применение пузырьковых уровней с различной ценой деления, за счет различной кривизны капсул в каждой паре пузырьковых уровней, обеспечивают измерения начальных сверхмалых углов наклона относительно горизонта контролируемого в реперной точке объекта по осям X, Y в диапазоне ±DA(t) пузырьковыми уровнями с большим радиусом кривизны и ценой деления A. При дальнейшем увеличении углов наклона относительно горизонта контролируемого в реперной точке объекта по осям X, Y в диапазоне ±DB(t), измерения производятся пузырьковыми уровнями с меньшим радиусом кривизны и ценой деления B, что существенно расширяет рабочий диапазон измерений за счет повышения чувствительности оптико-электронного измерительного блока предложенной конструкции в диапазоне сверхмалых углов наклона. Кроме того, использование двух пар пузырьковых уровней в рабочей оптической зоне цифровой видеокамеры, ортогонально друг другу в горизонтальной плоскости также обеспечивает расширение диапазона высокоточных измерений углов наклона относительно горизонта контролируемого в реперной точке объекта при понижении температуры окружающего воздуха, так как плотность спиртового раствора в пузырьковых уровнях увеличивается, что проявляется в увеличении размера мениска (газового пузырька уровня). Относительное увеличение размера мениска может быть соизмеримо с рабочим диапазоном измерений. В этом случае программа определения углов наклона продолжает выполнять измерения с заданной точностью с учетом относительных изменений размера мениска при низких температурах, тем самым повышая надежность работы устройства, что имеет существенное значение в условиях экстремальных температур окружающей среды. При этом высокоточное определение углов наклона относительно горизонта контролируемых элементов в реперной точке объекта по перемещению мениска спиртовых уровней определяется с помощью алгоритмов системы компьютерного зрения, в которой перемещение газового пузырька уровня автоматически отслеживается цифровой камерой в режиме реального времени. Это конструктивное решение позволяет снизить зависимость от человеческого фактора, то есть исключить субъективность пользователя при автоматическом получении результатов измерений и их обработке посредством высокоточной программы компьютерного зрения, что также позволяет повысить точность и достоверность измерений, а значит, - эффективность и надежность при его эксплуатации. Также такое конструктивное решение существенно упрощает конструкцию устройства и удешевляет его производство, так как используют унифицированные и сертифицированные, доступные на массовом рынке модули: спиртовые уровни, цифровые камеры, модули связи и контроллеры типа Attiny фирмы Microchip. Также повышение автономности устройства в условиях низких температур достигается за счет использования в качестве накопителей заряда суперконденсаторов в блоке зарядки и питания, что позволяет отказаться от всепогодных защищенных корпусов, так как их диапазон рабочих температур от -40 до +60°C значительно превышает диапазон рабочих температур кислотных и литиево-ионных аккумуляторов от -10 до +50°C, которые используются в известных устройствах. Кроме того, суперконденсаторы свободны от эффекта снижения емкости со временем, что также повышает надежность и экономичность эксплуатации предлагаемого устройства. Блок зарядки и питания в измерительном модуле выполнен в виде энергосберегающего источника, то есть с помощью автономной энергосберегающей технологии, который позволяет эффективно и автономно эксплуатировать устройство предложенной конструкции в тяжелых полевых условиях, особенно, в районах Крайнего Севера, где в основном построены крупные технологические комплексы, требующие постоянного геодезического мониторинга, а также на контролируемых участках земной поверхности в районах вечной мерзлоты, тем самым повышая безопасность эксплуатации инженерных или природных объектов. В качестве средства связи с регистрирующей станцией пользователя на базе ПК с общим и прикладным ПО, например, удаленным сервером, целесообразно использовать модули LoRa, характеризующиеся низким электропотреблением и широким диапазоном рабочих температур (от -40 до +60°C). Снижение издержек на изготовление измерительного модуля позволяет потенциальным пользователям увеличивать их количество на контролируемых объектах и, тем самым, повысить информативность геодезического мониторинга. Достигается это за счет использования сочетания недорогих, сертифицированных и доступных на массовом рынке спиртовых уровней, цифровых камер, модулей связи и контроллеров типа Attiny фирмы Microchip. Снижение издержек также достигается за счет использования суперконденсаторов, которые позволяют экономить на дорогих теплоизолирующих корпусах. Кроме того, такой подход к выбору сертифицированных модулей позволяет эффективно проводить метрологическую аттестацию измерительного канала при проектировании и создании на контролируемых объектах автоматизированных систем геодезического мониторинга, что особенно важно с точки зрения безопасной эксплуатации объектов и, в конечном счете, позволяет повысить эффективность и надежность геодезического мониторинга при определении пространственного положения относительно горизонта контролируемых объектов. Кроме того, указанная совокупность существенных признаков предлагаемого технического решения позволяет повысить оперативность доступа к представляемой информации для анализа и оценки состояния контролируемых элементов объекта с целью предиктивной диагностики целостности сооружений, а также оперативного обнаружения первичных признаков потери устойчивости (кренов) сооружений для выработки четких превентивных управляющих решений и предотвращения аварийных ситуаций на контролируемых объектах за счет применения в интерфейсном блоке приема-передачи цифровых данных, например, модуля SX1262 (LoRa) и современного протокола коммуникации автоматизированных устройств MQTT (Message Queuing Telemetry Transport, что позволяет выполнять высокоточное определение углов наклона контролируемого объекта в режиме реального времени в условиях редкой сети устройств мониторинга (с расстояниями между устройствами до 20 км), тем самым повышая безопасность эксплуатации объектов.
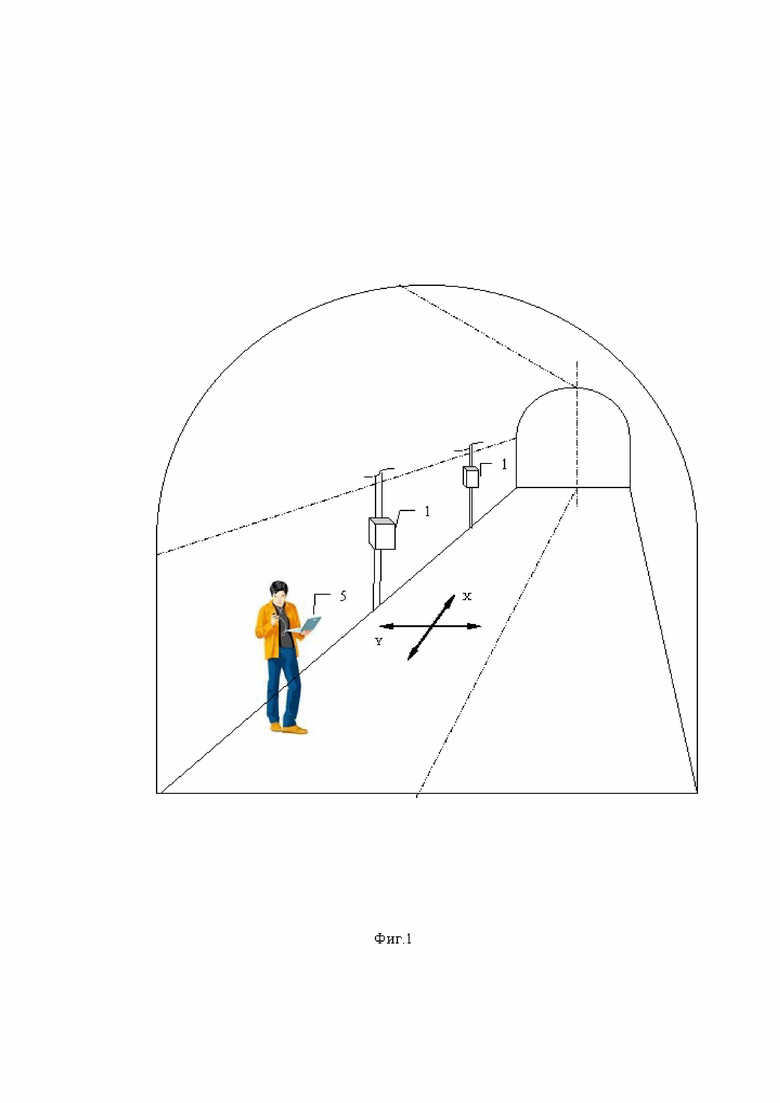
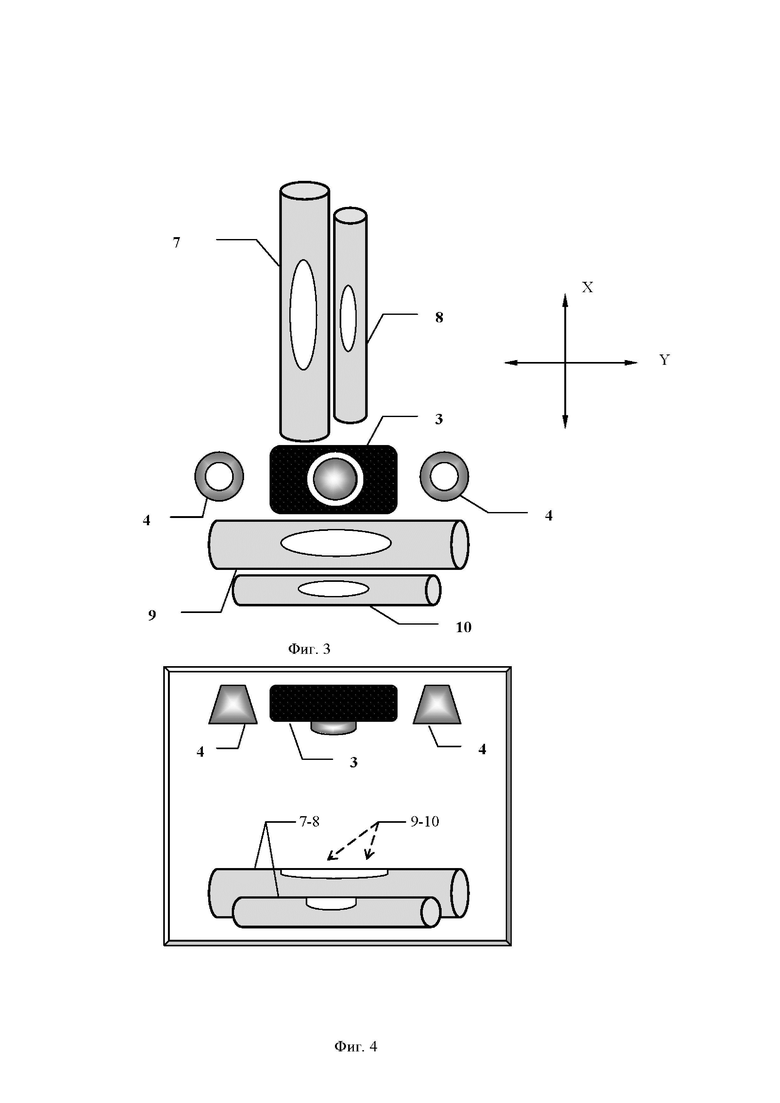
Сущность предлагаемых технических решений поясняется примером реализации способа высокоточного определения углов наклона контролируемого объекта, инженерного или природного, при геодезическом мониторинге посредством технологии компьютерного зрения в режиме реального времени в условиях экстремально низких температур окружающей среды (далее - способ), конкретным конструктивным исполнением устройства для высокоточного определения углов наклона контролируемого объекта, инженерного или природного, при геодезическом мониторинге посредством технологии компьютерного зрения в режиме реального времени в условиях экстремально низких температур окружающей среды (далее - устройство) и чертежами Фиг. 1-4. На Фиг. 1 схематично представлен процесс реализации предлагаемого способа на контролируемом участке: на стенках секций в патерне бетонной плотины ГЭС или на поверхности горной выработки и устройство для его осуществления, например, в составе системы геодезического мониторинга углов наклона (крена) контролируемого объекта. На Фиг. 2 представлена блок-схема предлагаемого устройства. На Фиг. 3-4 представлена схема оптико-электронного измерительного блока предлагаемого устройства.
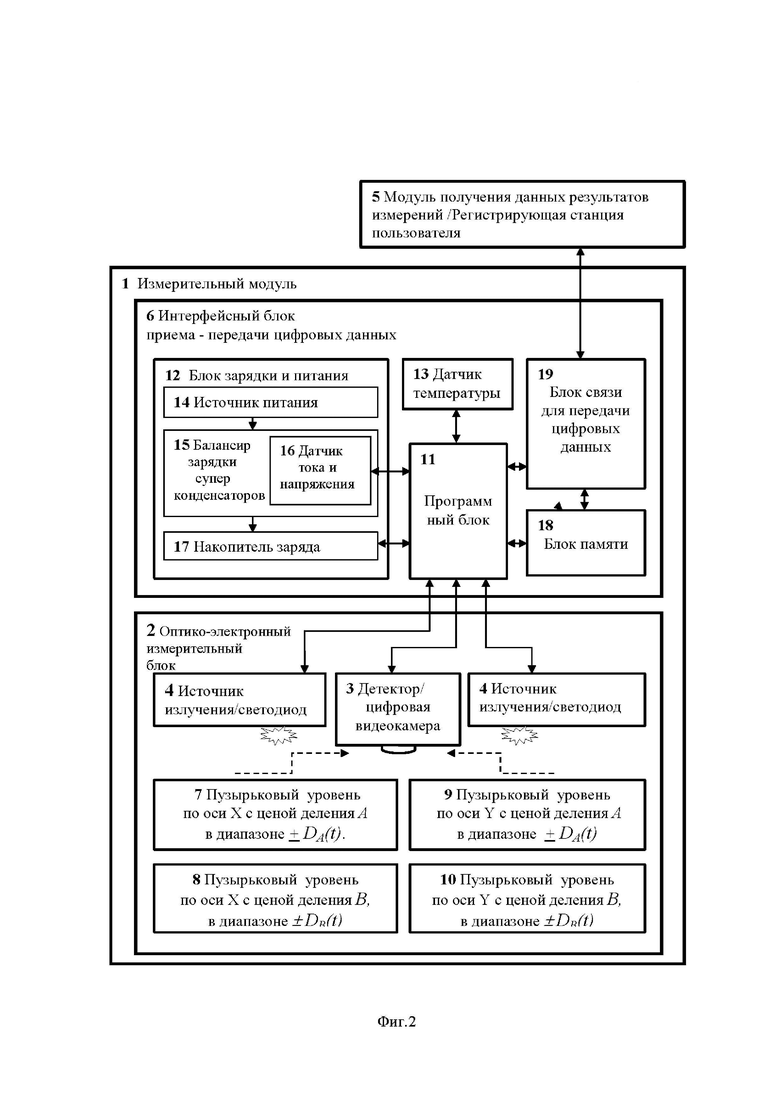
Предлагаемый способ реализуют с помощью устройства того же назначения следующим образом. Предварительно (см. Фиг. 1), до начала геодезических измерений на территории, где находится контролируемый объект, выбранный для проведения геодезического мониторинга, создают или используют уже готовый эталонный геодезический полигон, который представляет собой набор опорных пунктов объединенной планово-высотной геодезической сети, включающей геодезические реперы (далее - региональная сеть ПВС). Согласно техническому заданию на выполнение геодезического мониторинга определяют количество и расположение устройств, величину допустимой ошибки измерения углов наклона контролируемого объекта, периодичность выполнения измерений, диапазоны рабочих температур. Для определения углов наклона (крена) контролируемого объекта создают или используют только деформационную геодезическую сеть из состава региональной сети ПВС, представляющую собой опорные пункты, включающие геодезические реперы для геодезического мониторинга контролируемого объекта. На каждом опорном пункте, включающем геодезический репер, оснащенный предлагаемым устройством, выполняют измерения относительных смещений, свободно плавающего по поверхности мениска, газового пузырька в спиртовой жидкости в пузырьковом уровне, замкнутого в полости осесимметричной капсулы при отклонении ее оси симметрии относительно отвесной линии, при этом центр шкалы находится на оси симметрии капсулы. Далее определяют пространственные изменения положения светового пятна пузырька в полости капсулы относительно оси симметрии капсулы. Полученные данные результатов измерений сравнивают между собой и регистрируют в виде направления и величины наклона контролируемого объекта. Для этого (см. Фиг. 2) используют устройство, которое содержит электрически связанные между собой измерительный модуль 1, включающий оптико-электронный измерительный блок 2 на основе уровня пузырькового типа (далее - оптико-электронный измерительный блок 2), с детектором в виде цифровой видеокамеры 3 и источником излучения 4 в виде, по меньшей мере, двух светодиодов 4, а также модуль 5 получения данных результатов измерений углов наклона контролируемого объекта (далее - модуль 5 получения данных результатов измерений). Измерительный модуль 1 дополнительно снабжен интерфейсным блоком 6 приема-передачи цифровых данных и выполнен в едином корпусе с возможностью закрепления в заранее выбранных реперных точках, на контролируемых элементах инженерного или природного объекта, создающих собой опорные пункты деформационной геодезической сети, включающей геодезические реперы для геодезического мониторинга контролируемого объекта в режиме реального времени в условиях экстремально низких температур окружающей среды. Модуль 5 получения данных результатов измерений (см. Фиг.2) выполнен в виде регистрирующей станции 5 пользователя на базе ПК с общим и прикладным ПО, предназначенной для сбора, хранения, обработки предварительного цифрового потокового видеоизображения и определения высокоточных значений, продольных по оси X и поперечных по оси Y, углов наклона контролируемого объекта посредством технологии компьютерного зрения. Детектор 3 оптико-электронного измерительного блока 2, выполненный в виде цифровой видеокамеры 3, закреплен в верхней части указанного корпуса (см. Фиг. 2, поз. не обозначен) над площадкой, на которой закреплены четыре пузырьковых уровня 7, 8, 9, 10, каждый из которых содержит газовый пузырек в спиртовой жидкости, герметично замкнутый в полости капсулы цилиндрической формы (см. Фиг. 2, 3, 4). Причем упомянутые пузырьковые уровни 7-10 размещены парами, в каждой паре размещены пузырьковые уровни 7-10 с различным радиусом кривизны и длины капсул, соответственно, с различной ценой деления шкалы капсул и, соответственно, с различным диапазоном измерения углов. При этом указанные пары пузырьковых уровней 7-10 закреплены в упомянутом корпусе, в рабочей оптической зоне цифровой видеокамеры 3, ортогонально друг другу в горизонтальной плоскости (см. Фиг. 2, 3, 4). Пузырьковый уровень 7 по оси X с ценой деления шкалы A в диапазоне ±DA(t) (далее - пузырьковый уровень 7), пузырьковый уровень 8 по оси X с ценой деления шкалы B в диапазоне ±DB(t) (далее - пузырьковый уровень 8), пузырьковый уровень 9 по оси Y с ценой деления шкалы A в диапазоне ±DA(t) (далее - пузырьковый уровень 9), пузырьковый уровень 10 по оси Y с ценой деления шкалы B в диапазоне ±DB(t) (далее - пузырьковый уровень 10), где:
A - цена деления шкалы для пузырькового уровня 7,9, угловая секунда/ мм;
DA(t) - функция изменения диапазона измерения углов наклона пузырьковых уровней 7,9 в угловых секундах /мм;
DA(t) определяют по предложенной формуле:

где:
RA - радиус кривизны пузырьковых уровней 7, 9, мм;
lA - длина ампулы пузырьковых уровней 7, 9, мм;
lA0 - длина газового пузырька в капсуле пузырьковых уровней 7,9 с ценой деления шкалы А, при температуре окружающего воздуха +20°С, мм;
t - температура окружающего воздуха, °С;
kA - коэффициент теплового расширения пузырьков уровней 7,9,мм/°С;
ρ - количество угловых секунд в 1 радиане.
Таким образом, исходя из предложенной формулы (1) существует предел измерения углов наклона пузырьковыми уровнями 7,9 при низких температурах.
B - цена деления шкалы для пузырьковых уровней 8,10, угловая секунда/мм;
DB(t) - функция изменения диапазона измерения углов наклона, где индекс B обозначает принадлежность параметров пузырьковым уровням 8,10, соответственно;
DB(t) определяют по предложенной формуле:

Для выбора пузырьковых уровней 8,10, обеспечивающих расширение диапазона измерений углов наклона при низких температурах, необходимо использовать предложенную формулу:

где:
DA (tпред) - диапазон измерений пузырьковыми уровнями 7,9 при температуре tпред;
t пред - предельно допустимая температура, при которой определяется газовый пузырек пузырьковых уровней 7,9 программой компьютерного зрения.
По предложенной формуле (3) рассчитывают необходимую длину газового пузырька lB0 пузырьковых уровней 8,10 при температуре окружающего воздуха +20°С и подбирают ампулу необходимой длины и радиуса кривизны.
Указанный источник излучения 4 оптико-электронного измерительного блока 2 выполнен в виде, по меньшей мере, двух светодиодов 4, расположенных над площадкой с закрепленными пузырьковыми уровнями 7-10, для обеспечения освещенности в рабочей оптической зоне цифровой видеокамеры 3, необходимой для видеофиксации относительных смещений газового пузырька в спиртовой жидкости пузырьковых уровней 7-10 и последующего формирования предварительного цифрового потокового видеоизображения положения газового пузырька в указанных уровнях 7-10 (см. Фиг. 2, 3, 4). Причем цифровая видеокамера 3 оптико-электронного измерительного блока 2 связана посредством электрической, цифровой программно-логической связи с программным блоком 11 интерфейсного блока 6 приема-передачи цифровых данных. Программный блок 11 выполнен для обработки и получения предварительного цифрового потокового видеоизображения, управления цифровой видеокамерой 3, светодиодами 4, блоком 12 зарядки и питания, датчиком 13 температуры, блоком 14 памяти и блоком 15 связи для передачи цифровых данных (см. Фиг. 2, 3, 4). При этом интерфейсный блок 6 приема-передачи цифровых данных включает программный блок 11, цифровой вход-выход которого электрически и программно-логически связан с блоком 12 зарядки и питания, который выполнен в виде последовательно соединенных между собой посредством электрической и программно-логической связи источника 16 питания, балансира 17 зарядки суперконденсаторов с датчиком 18 тока и напряжения и накопителя 19 заряда, выполненного в виде, по меньшей мере, двух суперконденсаторов, последовательно соединенных между собой. Другие цифровые входы-выходы программного блока 11 соединены с цифровыми входами-выходами датчика 13 температуры и цифровыми входами-выходами, связанных между собой электрически и программно-логически, блока 14 памяти и блока 15 связи для передачи цифровых данных (далее - блок 15 связи), предназначенных для постоянной передачи или передачи по запросу (появлению связи) накопленной информации в виде предварительного цифрового потокового видеоизображения посредством цифровой программно-логической связи в программе упомянутого программного блока 11 на регистрирующую станцию 5 пользователя на базе ПК с общим и прикладным ПО, предназначенную для сбора, хранения, обработки предварительного цифрового потокового видеоизображения посредством алгоритмов программы компьютерного зрения путем цифрового автоматического сравнения координат углов вспомогательных прямоугольников в системе координат цифрового видеоснимка, описывающего текущее положение газового пузырька в указанных уровнях 7-10, с координатами углов этого прямоугольника, полученных на предыдущей эпохе наблюдения (предыдущем кадре цифрового видеоснимка) и автоматического преобразования посредством алгоритмов машинного обучения полученных цифровых значений относительных изменений координат вспомогательного прямоугольника, описывающего соответствующие положения газового пузырька в указанных уровнях 7-10 в высокоточные значения, продольных по оси X и поперечных по оси Y, углов наклона контролируемого объекта, при геодезическом мониторинге в режиме реального времени в условиях экстремально низких температур окружающей среды (см. Фиг. 2).
Оптико-электронный измерительный блок 2 выполнен на основе современных технических устройств, например, с использованием в качестве детектора 3, модуля цифровой видеокамеры OV4689, а в качестве источника излучения 4, светодиодов промышленного образца GNL3014. Кроме того, применение простых в изготовлении, но надежных и недорогих пузырьковых уровней 7-10, позволяют значительно упростить конструкцию устройства. Модуль 5 получения данных результатов измерений выполнен в виде регистрирующей станции 5 пользователя на базе ПК (или удаленного сервера на базе микроконтроллера типа Ruspberry pi) с общим и прикладным ПО для сбора, хранения и обработки предварительного цифрового потокового видеоизображения посредством алгоритмов программы компьютерного зрения, основанных, например, на библиотеке программ OpenCV и автоматического преобразования посредством алгоритмов машинного обучения полученных цифровых значений относительных изменений координат вспомогательного прямоугольника, описывающего соответствующие положения газового пузырька в упомянутых уровнях 7-10 в высокоточные значения, продольных по оси X и поперечных по оси Y, углов наклона контролируемого объекта. Программный блок 11 выполнен, например, в виде микроконтроллера на основе чипа attiny 85 с возможностью управления цифровой видеокамерой 3 и светодиодами 4, датчиком 13 температуры, блоком 14 памяти, блоком 15 связи и датчиком 18 тока и напряжения. Блок 12 зарядки и питания выполнен в виде последовательно соединенных между собой посредством электрической и программно-логической связи источника 16 питания, балансира 17 зарядки суперконденсаторов с датчиком 18 тока и напряжения и накопителя 19 заряда, выполненного в виде, по меньшей мере, двух суперконденсаторов, последовательно соединенных между собой. Упомянутый источник 16 питания выполнен в виде источника возобновляемой энергии, например, в виде монокристаллической солнечной батареи малой мощности, от 30 Вт. При этом работа устройства гарантируется в зимний период в средних широтах при постоянной установке солнечной панели под углом 90°. Такая установка солнечной панели снижает вероятность потери источника 16 питания из-за обледенения и образования снежного покрова. Датчик 13 температуры выполнен, например, на основе чипа DS18B20Z+. Блок 14 памяти выполнен, например, в виде модуля ESP32 microSD shield с возможностью записи данных измерений в виде предварительного цифрового потокового видеоизображения. Блок 15 связи выполнен, например, в виде УКВ/Wifi-маршрутизатора на основе модуля Wemos D32 mini ESP32 с возможностью предварительной обработки видеоизображения и получения предварительного цифрового потокового видеоизображения, чтения и записи данных на карту памяти типа MicroSD, передачу данных по протоколу беспроводной связи Wifi. Передача данных через УКВ-радиосвязь осуществляется с помощью, например, модуля SX1278 по протоколу LoRa. Датчик 18 тока и напряжения представляет собой, например, модуль CJMCU-219.
Предлагаемое устройство, реализующее способ, на примере системы геодезического мониторинга углов наклона (крена) контролируемого объекта посредством технологии компьютерного зрения в режиме реального времени в условиях экстремально низких температур окружающей среды (далее - система), работает следующим образом (см. Фиг. 1, 2). До начала геодезических измерений на территории, где находится контролируемый объект, выбранный для проведения геодезического мониторинга, в каждой реперной точке на контролируемых элементах объекта, представляющих собой набор опорных пунктов деформационной геодезической сети, устанавливают измерительный модуль 1. Предварительно, согласно техническому заданию на выполнение геодезического мониторинга, определяют количество и расположение измерительных модулей 1, величину допустимой ошибки измерения углов наклона, периодичность выполнения измерений, диапазоны рабочих температур. Для определения углов наклона (крена) контролируемого объекта создают или используют только деформационную геодезическую сеть, представляющую собой опорные пункты, включающие геодезические реперы для геодезического мониторинга контролируемого объекта. Для обеспечения предельно допустимой ошибки в рамках заданного диапазона работы измерительного модуля 1 выбирают пузырьковые уровни 7,8,9,10 в виде цилиндрических спиртовых уровней с необходимыми длинами капсул и цифровую видеокамеру 3, обеспечивающую необходимое разрешение видеоснимков. Для обеспечения необходимой периодичности выполнения измерения углов наклона контролируемого объекта, с учетом энергопотребления выбранной цифровой видеокамеры 3, блока 15 связи, определяют общее количество накопителей 19 заряда (ионисторов). Количество накопителей 19 заряда должно быть достаточным для обеспечения суточного сеанса измерений с заданной периодичностью. Для обеспечения ежедневной полной зарядки накопителей 19 заряда выбирают достаточное количество солнечных батарей или ветрогенераторов в соответствии с характерными погодными условиями на территории полигона геодезического мониторинга. Каждый оптико-электронный измерительный блок 2 измерительного модуля 1 калибруют. Калибровку выполняют с использованием алгоритмов машинного обучения технологии компьютерного зрения. Для этого применяют нейросеть обратного распространения. Для каждого измерительного модуля 1 определяют собственную нейросеть, выполняющую функцию авторегрессионной модели и фильтра аномальных выбросов. Каждая нейросеть сохраняется в базе данных сети геодезического мониторинга на регистрирующей станции 5 пользователя на базе ПК с общим и прикладным ПО и закрепляется за соответствующим измерительным модулем 1. Далее выполняют установку скомплектованных и калиброванных измерительных модулей 1 в заранее выбранных реперных точках на контролируемом объекте, представляющих собой набор опорных пунктов деформационной геодезической сети. Выполняется конфигурация системы геодезического мониторинга на контролируемом объекте. В процессе конфигурации выполняется следующее:
- установка прикладного программного обеспечения технологии компьютерного зрения на регистрирующую станцию 5 пользователя на базе ПК с общим и прикладным ПО;
- настройка сетевых соединений каждого измерительного модуля 1 с регистрирующей станцией 5 на базе ПК с общим и прикладным ПО.
После конфигурации системы начинается процесс непрерывного геодезического мониторинга контролируемого объекта. Процесс мониторинга состоит из обработки серии сеансов измерений, формирующиеся в последовательность циклов геодезического мониторинга контролируемого объекта. При включении кнопки питания блока 12 зарядки и питания измерительного модуля 1 инициализируются интерфейсный блок 6 приема-передачи цифровых данных и соответственно цифровая видеокамера 3, светодиоды 4 оптико-электронного измерительного блока 2. При помощи цифровой видеокамеры 3 автоматически производится видеозапись площадки с расположенными на ней пузырьковыми уровнями 7-10 с задаваемой пользователем периодичностью. Сеанс наблюдения на измерительном модуле 1 для определения углов наклона контролируемого объекта выполняется следующим образом. Программный блок 11 инициализирует измерительный модуль 1 и блок связи 15 путем выхода из режима низкого энергопотребления и опрашивает датчик 18 тока и напряжения балансира 17 зарядки суперконденсаторов из блока 12 зарядки и питания. Если заряда на накопителях 19 заряда достаточно для выполнения сеанса измерений и передачи цифровых данных, запускаются источник излучения в виде, по меньшей мере, двух светодиодов 4 и детектор в виде цифровой видеокамеры 3. В противном случае программный блок 11 вновь уходит в режим пониженного энергопотребления на 10 секунд и повторяет процесс инициализации измерительного модуля 1. При помощи цифровой видеокамеры 3 в течение времени, определенного продолжительностью сеанса, ведется видеозапись площадки с расположенными на ней пузырьковыми уровнями 7-10. В течение рабочего сеанса измерений компьютерной программой автоматически в блоке 15 с помощью модуля Wemos D32 выполняется преобразование видеозаписи в раздельные кадры видеопотока в виде фотоизображений положения газового пузырька в пузырьковых уровнях 7-10. Для этого видеозапись разделяется на четыре кадра, соответствующие расположению пузырьковых уровней 7-10. Затем каждое видеоизображение сегментируется для получения 2-канальных фотоизображений в целях экономии энергии на передачу данных. Сегментированные фотоизображения записываются в блок памяти 14. Параллельно ведется запись показателей с датчика 13 температуры. По завершению сеанса измерений, программный модуль 11 выключает оптико-электронный измерительный блок 2 и инициализирует процесс передачи цифровых данных предварительного цифрового потокового видеоизображения с виде сегментированного фотоизображения, которое в форме сообщения из блока 14 памяти интерфейсного модуля 6 приема-передачи цифровых данных последовательно передаются в блок 15 связи, для их отправки посредством блока 15 связи, например, через УКВ (Lora SX1262) или Wifi (ESP32) модули, на регистрирующую станцию 5 пользователя на базе ПК с общим и прикладным ПО, предназначенную для сбора, хранения, обработки предварительного цифрового потокового видеоизображения и для последующей обработки цифровых данных. По завершению процесса передачи цифровых данных, программный модуль 11 выключает блок 15 связи и уходит в режим пониженного потребления на время, определяемое периодом выполнения измерений. Затем цикл инициализации измерительного модуля 1 повторяется вновь. На регистрирующей станции 5 пользователя при помощи компьютерной программы автоматически посредством алгоритмов технологии компьютерного зрения выполняется определение угла наклона контролируемого объекта за сеанс наблюдений. Вычисления выполняются по следующему алгоритму с помощью технологии компьютерного зрения:
- для каждого полученного фотоизображения определяется контур газового пузырька пузырьковых уровней 7-10;
- для каждого полученного контура газового пузырька пузырьковых уровней 7-10 определяется описывающий вспомогательный прямоугольник;
- вычисляются координаты углов полученных вспомогательных прямоугольников в системе координат каждого фотоснимка газового пузырька пузырьковых уровней 7-10;
- вычисляется разность координат углов соответствующих вспомогательных прямоугольников текущего и предыдущего кадра измерений для каждого из пузырьковых уровней 7-10;
- в случае ухода газового пузырька пузырькового уровня 7 и пузырькового уровня 9 за диапазон измерений из-за понижения температуры, определение угла наклона контролируемого объекта выполняется по соответствующим сопряженным пузырьковым уровням 8 и 10, то есть для определения угла наклона измерительного модуля 1 используется отчет, полученный по основным пузырьковым уровням 7, 9 по осям X, Y с ценой деления шкалы A в диапазоне ±DA(t). В случае отсутствия возможности определить контур газового пузырька основных пузырьковых уровней 7, 9 из-за низких температур окружающей среды в полевых условиях, отчет для определения угла наклона измерительного модуля 1 берется по пузырьковым уровням 8, 10 по осям X, Y с ценой деления шкалы B в диапазоне ±DB(t) пузырьковых уровней 8, 10 на текущей эпохе наблюдения;
- разности координат предыдущей и последующей эпох, показатели с датчика 13 температуры всего сеанса наблюдений формируются в общий вектор наблюдений;
- вектор наблюдений подается на вход натренированной нейросети, на выходе нейросети формируется ответ в виде угла наклона контролируемого объекта за сеанс наблюдения. Нейросеть используется в роли авторегрессионной модели координат перемещения для каждого пузырькового уровня 7-10 и изменения температуры по углам наклона контролируемого объекта;
- вычисленные значения относительных смещений пузырьковых уровней 7-10 автоматически посредством компьютерной программы по соответствующему алгоритму с помощью технологии компьютерного зрения записываются в базу данных геодезического мониторинга на регистрирующей станции пользователя 5.
Таким образом, в режиме реального времени в условиях экстремально низких температур окружающей среды на каждом опорном пункте, включающем геодезический репер, оснащенный предлагаемым устройством, выполняют измерения относительных смещений свободно плавающего по поверхности мениска газового пузырька в спиртовой жидкости в упомянутых уровнях 7-10 с помощью детектора, выполненного в виде цифровой видеокамеры 3, а данные результатов измерений пространственного положения светового пятна газового пузырька в полости капсулы получают в виде предварительного цифрового потокового видеоизображения текущего положения газового пузырька в спиртовой жидкости в упомянутых уровнях 7-10 относительно его начального положения, которое передают в модуль получения данных результатов измерений, выполненный в виде регистрирующей станции 5 пользователя на базе ПК с общим и прикладным ПО или удаленного сервера с возможностью сбора, хранения, обработки предварительного цифрового потокового видеоизображения посредством алгоритмов технологии компьютерного зрения путем цифрового автоматического сравнения координат углов вспомогательных прямоугольников в системе координат цифрового видеоснимка, описывающего текущее положение газового пузырька в упомянутых уровнях 7-10, с координатами углов этого прямоугольника, полученных на предыдущей эпохе наблюдения (предыдущем кадре цифрового видеоснимка) и автоматического преобразования полученных цифровых значений посредством алгоритмов машинного обучения относительных изменений координат вспомогательного прямоугольника, описывающего соответствующие положения газового пузырька в указанных уровнях в высокоточные значения, продольных по оси X и поперечных по оси Y, углов наклона контролируемого объекта, при геодезическом мониторинге в режиме реального времени в условиях экстремально низких температур окружающей среды.
По завершению сеанса определения углов наклона элементов контролируемого объекта с каждого измерительного модуля 1 системы геодезического мониторинга ведется запись полученных значений в базу данных, расположенную на регистрирующей станции 5 пользователя.
По результатам анализа сеансов и циклов наблюдений выполняется оценка и прогноз состояния контролируемого объекта, оповещение пользователя системы о состоянии контролируемых инженерных или природных объектов в режиме реального времени в условиях экстремально низких температур окружающей среды, например, в районах вечной мерзлоты, с целью предиктивной диагностики целостности сооружений, а также оперативного обнаружения первичных признаков потери устойчивости сооружений и выработки четких превентивных управляющих решений для предотвращения аварийных ситуаций на контролируемом объекте.
Уровень технологической разработки предлагаемых технических решений и технической реализации выделяет их из ряда существующих способов и устройств. Прежде всего, это касается возможности применения способа и устройства в качестве тестовой технологии при метрологической аттестации устройств в автоматизированных системах геодезического мониторинга планово-высотных смещений контролируемого объекта, так как предлагаемые способ и устройство для высокоточного определения углов наклона контролируемого объекта при геодезическом мониторинге посредством технологии компьютерного зрения в режиме реального времени в условиях экстремально низких температур окружающей среды дает возможность:
- с высокой точностью выполнять оценку состояния контролируемых элементов объекта в режиме реального времени;
- с высокой точностью выполнять предиктивную диагностику целостности контролируемых элементов объекта;
- с высокой точностью получать информацию о первичных признаках потери устойчивости контролируемого объекта;
- на основании прогноза вырабатывать превентивные управляющие решения для предотвращения аварийных ситуаций на контролируемом объекте, тем самым повышать безопасность его эксплуатации.
Изобретения относятся к области высокоточных геодезических измерений, а именно к способам и устройствам получения, обработки и отображения геопространственной информации, компьютерным средствам преобразования с применением высокоточной технологии компьютерного зрения, и могут быть использованы в автоматизированных системах дистанционного определения пространственного положения (крена) контролируемого объекта в режиме реального времени в условиях экстремально низких температур окружающей среды. Предложены способ и устройство на основе уровня пузырькового типа, которое закрепляют на элементах конструкций контролируемого объекта. Устройство содержит измерительный модуль, включающий оптико-электронный измерительный блок на основе уровня пузырькового типа, с детектором в виде цифровой видеокамеры и источником излучения, интерфейсный блок приема-передачи цифровых данных, связанные между собой с помощью оптической, электрической и программно-логической связи и через блок связи для передачи цифровых данных с модулем получения данных результатов измерений углов наклона контролируемого объекта, выполненным в виде регистрирующей станции пользователя на базе ПК с общим и прикладным ПО с возможностью автоматического сбора, хранения, обработки и преобразования полученных цифровых данных геодезических измерений посредством алгоритмов программы компьютерного зрения в высокоточные значения, продольных по оси X и поперечных по оси Y, углов наклона контролируемого объекта. Технический результат – повышение точности определения углов наклона контролируемого объекта при геодезическом мониторинге. 2 н.п. ф-лы, 4 ил.
1. Способ высокоточного определения углов наклона контролируемого объекта, инженерного или природного, при геодезическом мониторинге посредством технологии компьютерного зрения в режиме реального времени в условиях экстремально низких температур окружающей среды, при котором с помощью устройства на основе уровня пузырькового типа, закреплённого на элементах конструкций контролируемого объекта, измеряют относительные смещения свободно плавающего по поверхности мениска газового пузырька в жидкости, замкнутого в полости осесимметричной капсулы при отклонении её оси симметрии относительно отвесной линии, при этом центр шкалы находится на оси симметрии капсулы, определяют пространственные изменения положения светового пятна пузырька в полости капсулы относительно оси симметрии капсулы, полученные данные результатов измерений сравнивают между собой и регистрируют в виде направления и величины наклона контролируемого объекта отличающийся тем, что на контролируемом объекте, инженерном или природном, предварительно создают деформационную геодезическую сеть, представляющую собой опорные пункты, включающие геодезические реперы для геодезического мониторинга контролируемого объекта, инженерного или природного, в режиме реального времени в условиях экстремально низких температур окружающей среды, и на каждом опорном пункте, включающем геодезический репер, оснащенный устройством на основе уровня пузырькового типа, выполняют измерения относительных смещений свободно плавающего по поверхности мениска газового пузырька в спиртовой жидкости в упомянутом уровне с помощью детектора, выполненного в виде цифровой видеокамеры, а данные результатов измерений пространственного положения светового пятна газового пузырька в полости капсулы получают в виде предварительного цифрового потокового видеоизображения текущего положения газового пузырька в спиртовой жидкости в упомянутом уровне относительно его начального положения, которое передают в модуль получения данных результатов измерений, выполненный в виде регистрирующей станции пользователя на базе персонального компьютера с общим и прикладным программным обеспечением (далее – ПК с общим и прикладным ПО) с возможностью сбора, хранения, обработки предварительного цифрового потокового видеоизображения посредством алгоритмов технологии компьютерного зрения путём цифрового автоматического сравнения координат углов вспомогательных прямоугольников в системе координат цифрового видеоснимка, описывающего текущее положение газового пузырька в указанных уровнях, с координатами углов этого прямоугольника, полученных на предыдущей эпохе наблюдения (предыдущем кадре цифрового видеоснимка) и автоматического преобразования посредством алгоритмов машинного обучения полученных цифровых значений относительных изменений координат вспомогательного прямоугольника, описывающего соответствующие положения газового пузырька в упомянутых уровнях в высокоточные значения, продольных по оси X и поперечных по оси Y, углов наклона контролируемого объекта, инженерного или природного, при геодезическом мониторинге в режиме реального времени в условиях экстремально низких температур окружающей среды.
2. Устройство для высокоточного определения углов наклона контролируемого объекта, инженерного или природного, при геодезическом мониторинге посредством технологии компьютерного зрения в режиме реального времени в условиях экстремально низких температур окружающей среды, реализующее способ по п. 1, содержащее электрически связанные между собой измерительный модуль, включающий оптико-электронный измерительный блок на основе уровня пузырькового типа, с детектором и источником излучения, а также модуль получения данных результатов измерений углов наклона контролируемого объекта, отличающееся тем, что указанный измерительный модуль дополнительно снабжён интерфейсным блоком приёма-передачи цифровых данных и выполнен в едином корпусе с возможностью закрепления в заранее выбранных реперных точках на контролируемом объекте, инженерном или природном, создающих собой опорные пункты деформационной геодезической сети, включающей геодезические реперы для геодезического мониторинга контролируемого объекта, инженерного или природного, в режиме реального времени в условиях экстремально низких температур окружающей среды, а указанный модуль получения данных результатов измерений выполнен в виде регистрирующей станции пользователя на базе ПК с общим и прикладным ПО, предназначенной для сбора, хранения, обработки предварительного цифрового потокового видеоизображения и последующего определения высокоточных значений, продольных по оси X и поперечных по оси Y, углов наклона контролируемого объекта, инженерного или природного, посредством технологии компьютерного зрения, при этом упомянутый детектор оптико-электронного измерительного блока, выполненный в виде цифровой видеокамеры, закреплён в верхней части указанного корпуса над площадкой, на которой закреплены четыре пузырьковых уровня, каждый из которых содержит газовый пузырёк в спиртовой жидкости, герметично замкнутый в полости капсулы цилиндрической формы, причём упомянутые пузырьковые уровни размещены парами, в каждой паре размещены пузырьковые уровни с различным радиусом кривизны и длины капсул, соответственно, с различной ценой деления шкалы капсул и, соответственно, с различным диапазоном измерения углов, при этом указанные пары пузырьковых уровней закреплены в упомянутом корпусе, в рабочей оптической зоне цифровой видеокамеры, ортогонально друг другу по оси X и по оси Y в горизонтальной плоскости, а указанный источник излучения оптико-электронного измерительного блока выполнен в виде, по меньшей мере, двух светодиодов, расположенных над площадкой с закреплёнными пузырьковыми уровнями, для обеспечения освещённости в рабочей оптической зоне цифровой видеокамеры, необходимой для видеофиксации относительных смещений газового пузырька в спиртовой жидкости пузырьковых уровней и последующего формирования предварительного цифрового потокового видеоизображения положения газового пузырька в упомянутых уровнях, причём цифровая видеокамера оптико-электронного измерительного блока связана посредством электрической, цифровой программно-логической связи с программным блоком интерфейсного блока приёма-передачи цифровых данных, который выполнен для обработки и получения предварительного цифрового потокового видеоизображения, управления цифровой видеокамерой, светодиодами, блоком зарядки и питания, датчиком температуры, блоком памяти и блоком связи для передачи цифровых данных, при этом интерфейсный блок приёма-передачи цифровых данных включает программный блок, цифровой вход-выход которого электрически и программно-логически связан с блоком зарядки и питания, который выполнен в виде последовательно соединённых между собой посредством электрической и программно-логической связи источника питания, балансира зарядки суперконденсаторов с датчиком тока и напряжения и накопителя заряда, выполненного в виде, по меньшей мере, двух суперконденсаторов, последовательно соединённых между собой, другие цифровые входы-выходы программного блока соединены с цифровыми входами-выходами датчика температуры и цифровыми входами-выходами, связанных между собой электрически и программно-логически, блока памяти и блока связи для передачи цифровых данных, предназначенных для постоянной передачи или передачи по запросу - появлению связи накопленной информации в виде предварительного цифрового потокового видеоизображения посредством цифровой программно-логической связи в программе упомянутого программного блока на регистрирующую станцию пользователя на базе ПК с общим и прикладным ПО, предназначенную для сбора, хранения, обработки предварительного цифрового потокового видеоизображения посредством алгоритмов технологии компьютерного зрения путём цифрового автоматического сравнения координат углов вспомогательных прямоугольников в системе координат цифрового видеоснимка, описывающего текущее положение газового пузырька в упомянутых уровнях, с координатами углов этого прямоугольника, полученных на предыдущей эпохе наблюдения (предыдущем кадре цифрового видеоснимка) и автоматического преобразования посредством алгоритмов машинного обучения полученных цифровых значений относительных изменений координат вспомогательного прямоугольника, описывающего соответствующие положения газового пузырька в упомянутых уровнях в высокоточные значения, продольных по оси X и поперечных по оси Y, углов наклона контролируемого объекта, инженерного или природного, при геодезическом мониторинге в режиме реального времени в условиях экстремально низких температур окружающей среды.
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛА НАКЛОНА | 2016 |
|
RU2655024C2 |
| Способ геодезического геоинформационного мониторинга природных и техногенных объектов с применением метода автоматизированного дешифрирования многоспектральных цифровых аэрокосмических фотоснимков | 2017 |
|
RU2652652C1 |
| СИСТЕМА ВЫСОКОТОЧНОГО МОНИТОРИНГА СМЕЩЕНИЙ ИНЖЕНЕРНЫХ СООРУЖЕНИЙ | 2012 |
|
RU2496124C1 |
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
