Изобретение относится к взлетно-посадочным платформам для летательных аппаратов и обеспечивает взлет и посадку летательного аппарата с малого корабля или другого плавающего объекта в условиях качки и при ветре, смягчает столкновение летательного аппарата при жесткой посадке. Предлагаемое техническое решение может быть использовано и в условиях с ограничениями по пространственному окружению мешающими препятствиями.
Беспилотные летательные аппараты (БПЛА) стали во многом незаменимыми при выполнений доставки грузов, различных исследований, анализа окружающего пространства, контроля и охраны объектов, в спасательных операциях и максимально широко в военном деле. Количество версий БПЛА и их общая численность, особенно мультикоптеров, по динамике развития не могут быть сравнимы ни с одним из видов транспортных средств, при нескончаемости продолжающихся разработок. В свою очередь, кроме самих БПЛА, предназначенных для воздухоплавания с частыми посадками для дозаправки, при использовании электрической тяги, развивается и наземная инфраструктура. И если для простейших мультикоптеров применяются элементарные посадочные коврики, то для более тяжелых моделей создаются системы посадки с использованием навигации на основе глобальных навигационных спутниковых систем ГЛОНАСС/GPS, систем дифференциальной коррекции, систем телевидения и связи между БПЛА и посадочной платформой, устройств посадочного позиционирования.
Известна посадочная платформа для БПЛА вертикального взлета и посадки (Патент РФ №2722249,опубл. 28.05.2020). Платформа содержит посадочную поверхность, электрические контакты и устройство позиционирования БПЛА путем воздействия на его опоры в виде ирисовых диафрагм, соединенных с приводом закрывания/открывания.
Недостатком известного изобретения является обязательное горизонтальное стационарное размещение платформы и зависимость от количества опор БПЛА допустимого отклонения посадки БПЛА, при котором позиционирование будет успешным.
Известна система посадки беспилотного летательного аппарата вертикального взлета и посадки (Патент РФ №2666975,опубл. 13.09.2018). Система посадки беспилотного летательного аппарата вертикального взлета и посадки состоит из воздушного модуля, закрепляемого на летательном аппарате, и модуля посадки. Воздушный модуль содержит корпус, размещенный в корпусе блок электронного управления и шарообразный якорь, размещенный на жесткой стойке. На нижней части якоря выполнены электрические контакты, а модуль посадки выполнен в виде устройства захвата. Устройство захвата состоит из купола с установленными в нижней части купола створками, выполненными с возможностью открытия внутрь купола, причем в каждой створке выполнен паз, таким образом, что в закрытом положении створок данные пазы образуют отверстие, в которое плотно помещается стойка якоря воздушного модуля системы посадки. Створки выполнены с подпружиненными контактами. Система посадки выполнена с возможностью подлета беспилотного летательного аппарата к модулю посадки снизу вверх, при этом воздушный модуль закреплен в верхней части корпуса беспилотного летательного аппарата.
Недостатком известного изобретения является необходимость применения мачтового устройства со стрелой выноса, при капитальной стационарной конструкции, для обеспечения возможности подлета беспилотного летательного аппарата к модулю посадки снизу вверх, обеспечивающего наиболее надежную работу системы.
В свою очередь среднестатистические характеристики килевой качки составляют 1-1,5°, бортовой 3-4°, вертикальной 1,5-2 м в центре водоизмещения (Посадка вертолета на качающуюся палубу. Грибанов А.С. - 2021 - [Электронный ресурс]. Режим доступа: posadka-vertolyota-na-kachayuschuyusya-palubu.pdf (дата обращения: 30.10.2023).
Дополнительно к этому, в частности, если для взлета аппарата нужна площадка 2×2 м, то для его возвращения требуется площадь не менее чем 3×3 м, которая есть не на всех судах. (17 авг. 2019. Полет с приводнением. Буланов А. [Электронный ресурс]. Режим доступа: https://iz.ru/903530/aleksandr-bulanov/polet-s-privodneniem-v-rossii-sozdadut-novyi-dron-dlia-arktiki (дата обращения: 30.10.2023).
На малых кораблях в отсутствии штиля эти характеристики могут умножаться в разы. Из статистики практического применения мультикоптеров на судах с вертолетными площадками для взлета и посадки БПЛА без особых проблем применимы практически многие из систем, использующихся в стационарных условиях. Зачастую, БПЛА для малых кораблей необходимы в наибольшей мере, чем для всемерно оснащенных крупных кораблей. В свою очередь, посадки мультикоптеров на малые корабли в большей степени не всегда успешны, что сдерживает применение мультикоптеров в чрезвычайно востребованном морском направлении.
Известно взлетно-посадочное устройство беспилотного летательного аппарата корабельного базирования (Пат. РФ №180260, опубл.07.06.2018), расположенное вне корпуса корабля и содержащее газовый цилиндр с регулируемым клапаном, V- образное устройство захвата, трос поворотной консоли, сетку - улавливатель с подвижным посадочным полотном. Посадочная площадка образована механизмом стабилизации в трех плоскостях, жестко прикрепленным к силовому элементу палубы корабля, ИК - излучателем для формирования посадочной траектории БЛА, поворотной консолью, закрепленной через шарнир к газовому цилиндру. Устройство обеспечивает безопасный взлет и посадку различного класса БЛА для эксплуатации на кораблях, не имеющих свободную палубу в простых и сложных метеоусловиях.
Таким образом, на сегодняшний день наиболее приспособленной системой для посадки на суда, взятая за прототип, известна стабилизированная платформа (Патент РФ №2711720,опубл. 21.01.2020). Стабилизированная платформа, содержит плиту, которая при помощи подвижных кареток с возможностью движения по направляющим к центру, в результате контролируемого системой управления изменения длины ног и положения подвижных кареток, обеспечивает требуемое (например, горизонтальное) положение плиты стабилизированной платформы. Она для вертолета, самолета вертикального взлета и посадки, беспилотного летательного аппарата или зонда обеспечивает взлет с судна в условиях сильной качки и при ветре, снижает удар летательного аппарата при жесткой посадке.
Недостатками известного изобретения являются значительные сдерживания по диапазону углов качки из-за ограничений длины ног подвижных кареток и отсутствие компенсации вертикального перемещения палубы.
Исходя из трудностей посадки БПЛА на малоразмерные корабли, некоторые производители начали предлагать для таких случаев приводнение мультикоптеров, понуждая сделать такую операцию штатной. Именно приводнение для производителей во многом облегчает производство БПЛА, но приводит к тем же потерям владельцев мультикоптеров, или в лучших случаях к неремонтопригодным неисправностям.
Задачей настоящего изобретения является устранение отмеченных недостатков и разработка стабилизированной платформы для использования на небольших кораблях и плавающих объектах, обеспечивая вертикальный взлет и посадку летательного аппарата при качке и существенной ветровой нагрузке, испытываемой летательным аппаратом и платформой с возможностью обеспечения снижения удара летательного аппарата о платформу при жесткой/аварийной посадке.
Техническим результатом заявленного технического решения является создание корабельного динамического аэропричала для мультикоптеров в виде привязной воздушной платформы, стабилизированной от нежелательных присущностей качки.
Задача решается за счет того, что корабельный динамический аэропричал для мультикоптеров содержит стабилизированную платформу, являющуюся посадочной платформой для вертикального взлета и посадки мультикоптеров. Платформа представляет собой привязное технологическое оборудование с посадочной площадкой, выпускаемое в надводное пространство с корабля за пределы надстроек, стоячего и бегучего такелажа для нейтрализации качки. Платформа включает, по меньшей мере, один подъемный двигатель, два подъемных воздушных винта, расположенных в плоскости платформы, выполненных с возможностью создания вертикальной силы тяги, привод, соединяющий указанный, по меньшей мере, один электрический подъемный двигатель, расположенный под посадочной площадкой, с указанными, по меньшей мере, двумя подъемными воздушными винтами. Подъемные воздушные винты разнесены и между ними установлено активное устройство позиционирования. Платформа, по меньшей мере, одним привязным кабель-тросом через блоки и брашпиль, установленные на палубе корабля, соединена с устройством управления электрическими двигателям и активным устройством позиционирования.
На корабельном динамическом аэропричале мультикоптеров в парах подъемных воздушных винтов могут вращаться в противоположных направлениях
На корабельном динамическом аэропричале мультикоптеров системы подъемные воздушных винтов могут быть снабжены механическими балансирами для использования гироскопического эффекта.
На корабельном динамическом аэропричале мультикоптеров место устройства позиционирования может быть ограждено от вихрей подъемных воздушных винтов экранами, причем наклонно установленные экраны могут дополнительно служить элементами устройства позиционирования.
На корабельном динамическом аэропричале мультикоптеров для создания дополнительной подъемной силы по краям платформы могут быть, по меньшей мере, установлены два вспомогательных воздушных винта с электрическими двигателями, в паре вращающихся в противоположных направлениях, для нагнетания воздуха к подъемным воздушным винтам, при этом платформа, до экранов перед ними, имеет плоскую поверхность с отверстием для прохождения потоков воздуха от подъемных воздушных винтов.
При использовании корабельного динамического аэропричала мультикоптеров при отключении подъемного двигателя подъемных воздушных винтов может быть предусмотрена аварийная посадка в режиме авторотации подъемных воздушных винтов.
Конкретные реализации корабельного динамического аэропричала мультикоптеров могут значительно отличаться, и ниже приводится, только для иллюстрации настоящего изобретения минимальная версия, никоим образом не ограничивая объем возможных реализаций, которая поясняется эскизом.
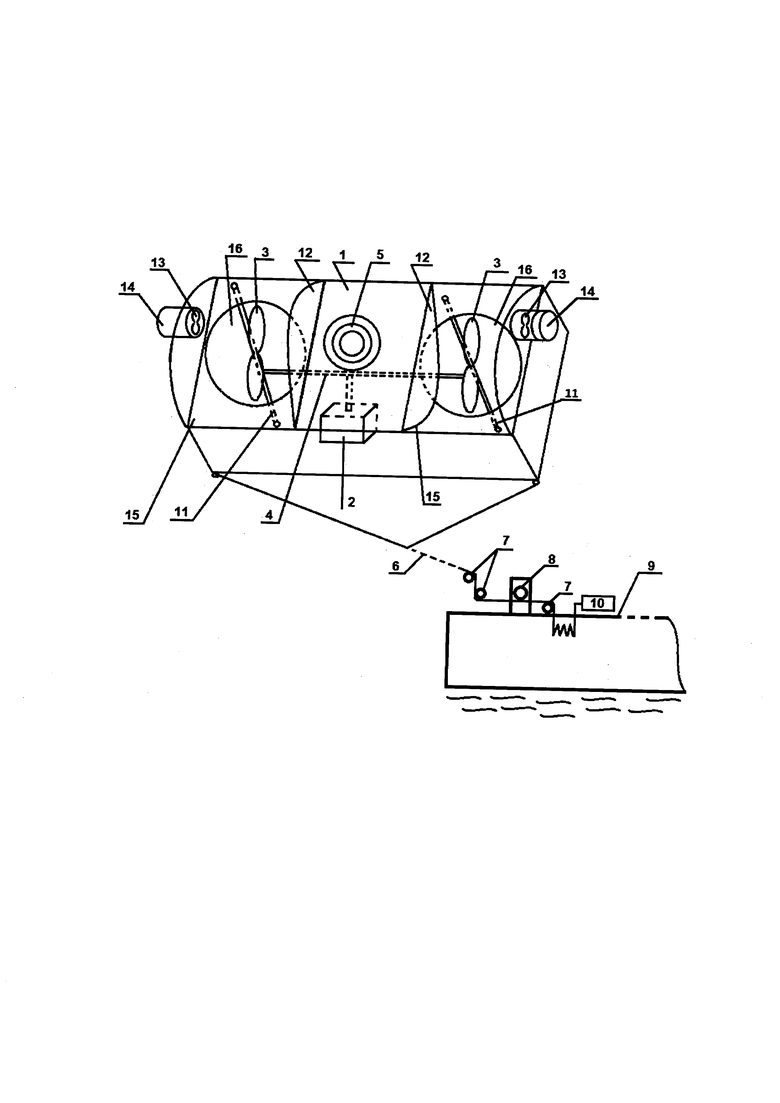
На фигуре изображен общий вид корабельного динамического аэропричала для мультикоптеров в минимальной версии исполнения.
Корабельный динамический аэропричал для мультикоптеров содержит стабилизированную платформу 1, являющуюся посадочной платформой для взлета и посадки мультикоптеров. Платформа представляет собой привязное технологическое оборудование, с посадочной площадкой, выпускаемое в надводное пространство с корабля за пределы надстроек, стоячего и бегучего такелажа для нейтрализации качки. Платформа 1 включает, по меньшей мере, один подъемный двигатель 2, расположенный под посадочной площадкой, два подъемных воздушных винта 3, расположенных в плоскости платформы 1, выполненных с возможностью создания вертикальной силы тяги, привод 4, соединяющий указанный, по меньшей мере, один электрический подъемный двигатель 2 с указанными, по меньшей мере, двумя подъемными воздушными винтами 3. Подъемные воздушные винты разнесены и между ними установлено активное устройство позиционирования 5. Платформа, по меньшей мере, одним привязным кабель-тросом 6 через блоки 7 и брашпиль 8, установленные на палубе корабля 9, соединена с устройством управления 10 электрическими двигателям 2 и активным устройством позиционирования 5, расположенным на посадочной площадке.
На корабельном динамическом аэропричале мультикоптеров в парах подъемные воздушные винты 3 могут быть вращающимися в противоположных направлениях
На корабельном динамическом аэропричале мультикоптеров системы подъемных воздушных винтов 3 могут быть снабжены механическими балансирами 11.
На корабельном динамическом аэропричале мультикоптеров место устройства позиционирования 5 на посадочной площадке может быть ограждено от вихрей подъемных воздушных винтов экранами 12, причем наклонно установленные экраны дополнительно являются направляющими элементами устройства позиционирования, обеспечивающих при некорректной посадке мультикоптера с отклонением в стороны плоскостей, его скатывание к центру устройства позиционирования.
На корабельном динамическом аэропричале мультикоптеров для создания дополнительной подъемной силы по краям платформы, на продолжениях боковых сторон могут быть, по меньшей мере, установлены два вспомогательных воздушных винта 13 с электрическими двигателями 14, в паре вращающихся в противоположных направлениях, для нагнетания воздуха к подъемным воздушным винтам 3, при этом платформа, до экранов 12 перед ними, имеет плоскую поверхность 15 с отверстием 16 для прохождения потоков воздуха от подъемных воздушных винтов.
Корабельный динамический аэропричал мультикоптеров в аварийных ситуациях, когда подъемные воздушные винты 3 могут быть отключены для использования аварийной посадки в режиме авторотации, за счет вращения от обеспечения набегающими на подъемные воздушные винты 3 потоками воздуха.
Корабельный динамический аэропричал мультикоптеров работает следующим образом.
При самой ответственной функции посадки мультикоптера, в минимальной версии, стабилизированная платформа 1, являющаяся посадочной платформой для вертикального взлета и посадки беспилотных летательных аппаратов, на привязном кабель-тросе 6, с помощью подъемного двигателя 2, с двумя подъемными воздушными винтами 3 удерживается, например, за кормой корабля над водной поверхностью, выше корпуса. Воздушные винты 3, расположенные в плоскости платформы 1, за счет вертикальной силы тяги от привода 4 и электрического подъемного двигателя 2, от устройства управления 10 электрическими двигателям 2, обеспечивают ее подъем и удержание со стабилизацией на заданной высоте за счет подъемной силы воздушных винтов 3 и противодействия кабель-троса 6. В активное устройство позиционирования 5, установленное на посадочной площадке в разносе между подъемными воздушными винтами 3 опускается мультикоптер с выпущенным якорем и фиксируется устройством позиционирования 5. Соединенный с платформой мультикоптер, при своих работающих воздушных винтах, не создает излишней нагрузки на платформу, и ее работа осуществляется в штатном режиме. При выключенных воздушных винтах мультикоптера подъемные воздушные винты 3 переводятся в форсированный режим, для удержания платформы с дополнительным весом мультикоптера. После фиксации, в том и другом случаях, кабель- трос 6 путем укорочения выпуска через блоки 7 и через брашпиль 8, установленные на палубе корабля 9, подтягивает платформу 1 к устройству ее причаливания (на фиг.1 не показано) на палубе и прижимает до неподвижного закрепления. Таким образом обеспечивается с палубы корабля свободный доступ как к мультикоптеру, так и удерживающей его платформе, для гарантированного закрепления на причальном устройстве может быть использован механический крепеж.
Для повышения остойчивости платформы на корабельном динамическом аэропричале мультикоптеров, в целях симметричности действующих сил, воздушные винты 3 в парах могут вращаться в противоположных направлениях.
Для обеспечения повышения стабилизации нахождения платформы в горизонтальном положении на корабельном динамическом аэропричале мультикоптеров системы подъемных воздушных винтов могут быть снабжены механическими балансирами 11.
На корабельном динамическом аэропричале мультикоптеров для устранения воздействия потоков воздуха от подъемных воздушных винтов 3 на посадку мультикоптера, место устройства позиционирования ограждено от вихрей подъемных воздушных винтов 3 экранами 12. В свою очередь, наклонно установленные к внешним сторонам платформы экраны 12 дополнительно служат элементами устройства позиционирования 5, своими плоскостями направляют от бокового отклонения мультикоптер к центральной точке устройства позиционирования 5.
Корабельный динамический аэропричал мультикоптеров для создания дополнительной подъемной силы, по краям платформы, на продолжениях боковых сторон, по меньшей мере, установлены два вспомогательных воздушных винта 13 с электрическими двигателями 14, в паре вращающихся в противоположных направлениях, для нагнетания воздуха к подъемным воздушным винтам, при этом платформа, до экранов 12 перед ними, имеет плоскую поверхность 15 с отверстием 16 для прохождения потоков воздуха от подъемных воздушных винтов.
При использовании корабельного динамического аэропричала мультикоптеров при отключении подъемного двигателя 2 подъемных воздушных винтов 3 может быть использована аварийная посадка в режиме авторотации за счет подъемных воздушных винтов 3.
Промышленное применение позволяет обеспечивать вертикальный взлет и посадку летательного аппарата при качке и существенной ветровой нагрузке, испытываемой летательным аппаратом и платформой с возможностью обеспечения снижения удара летательного аппарата о платформу при посадке. Например, при бортовой качке корабля, когда непредсказуемо изменяются смещения от вертикали и углы относительно горизонта бортовых посадочных площадок, взлет и посадка мультикоптеров не представляется возможной. В подобных случаях, на корабле, по предлагаемому изобретению, корабельный динамический аэропричал мультикоптеров, зафиксированный за пределами надстроек, стоячего и бегучего такелажа, снимается с крепления и с помощью подъемных воздушных винтов отрывается от корпуса, стабилизируется и удерживается за кормой кабель-тросом над водной поверхностью выше корпуса корабля. Предварительно установленный на нем и зафиксированный устройством позиционирования мультикоптер готов к взлету в облегченных условиях со стабилизированной платформы, которая причалена к кораблю. При необходимости взлета мультикоптера производится разблокировка устройством позиционирования его якоря и мультикоптер отрывается от аэропричала. При посадке мультикоптера, в устройство позиционирования, установленное на посадочной площадке, мультикоптер опускается и фиксируется устройством позиционирования за якорь. Удерживаемая за кормой корабля кабель-тросом и подъемными винтами над водной поверхностью выше корпуса корабля платформа с помощью брашпиля кабель-тросом подтягивается к месту размещения и приводится в исходное положение. Посаженный мультикоптер обслуживают по предназначению.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пост наблюдения на базе привязного беспилотного летательного аппарата | 2023 |
|
RU2807768C1 |
| Аэромобильная система воздушного наблюдения | 2022 |
|
RU2782479C1 |
| УСТРОЙСТВО ДЛЯ ВЗЛЕТА И ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2694251C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2023 |
|
RU2818594C1 |
| Способ принудительной посадки беспилотного летательного аппарата вертолетного типа на посадочную площадку корабля | 2015 |
|
RU2620848C2 |
| Гибридная аэромобильная система воздушного наблюдения | 2023 |
|
RU2827131C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2666975C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ПРИВЯЗНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2009 |
|
RU2441809C2 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2615587C9 |
Изобретение относится к взлетно-посадочным платформам для летательных аппаратов. Корабельный динамический аэропричал для мультикоптеров содержит посадочную платформу (1) для вертикального взлета и посадки беспилотных летательных аппаратов. Платформа (1) включает подъемный двигатель (2), два подъемных воздушных винта (3), расположенных в плоскости платформы (1), выполненных с возможностью создания вертикальной силы тяги, причем подъемные воздушные винты (3) разнесены и между ними установлено активное устройство позиционирования (5). Платформа (1) привязным кабель-тросом (6) через блоки (7) и брашпиль (8), установленные на палубе корабля (9), соединена с устройством управления (10) электрическим двигателем (2) и активным устройством позиционирования (5). Достигается взлет и посадка мультикоптеров с плавающего объекта в условиях качки и ветра, а также смягчение жесткой посадки. 4 з.п. ф-лы, 1 ил.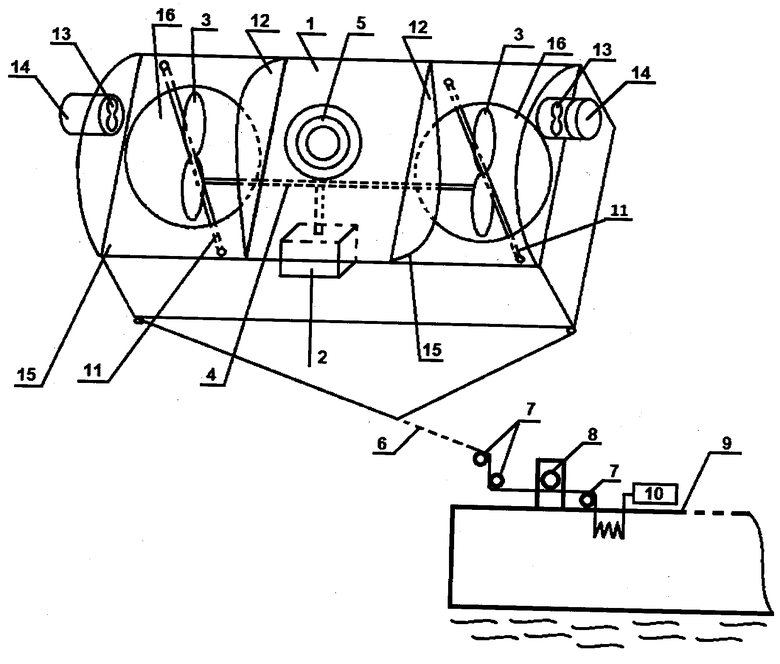
1. Корабельный динамический аэропричал для мультикоптеров, содержащий стабилизированную платформу, являющуюся посадочной платформой для взлета и посадки мультикоптеров, отличающийся тем, что платформа включает, по меньшей мере, один подъемный двигатель, два подъемных воздушных винта, расположенных в плоскости платформы, выполненных с возможностью создания вертикальной силы тяги, привод, соединяющий указанный, по меньшей мере, один электрический подъемный двигатель с указанными, по меньшей мере, двумя подъемными воздушными винтами, причем подъемные воздушные винты разнесены и между ними установлено активное устройство позиционирования, платформа, по меньшей мере, одним привязным кабель-тросом через блоки и брашпиль, установленные на палубе корабля, соединена с устройством управления электрическими двигателями и активным устройством позиционирования.
2. Корабельный динамический аэропричал мультикоптеров по п. 1, отличающийся тем, что подъемные воздушные винты снабжены механическими балансирами.
3. Корабельный динамический аэропричал мультикоптеров по п. 1, отличающийся тем, что место устройства позиционирования ограждено от вихрей подъемных воздушных винтов 3 экранами 12.
4. Корабельный динамический аэропричал мультикоптеров по п. 1, отличающийся тем, что экраны ограждения от вихрей подъемных воздушных винтов выполнены с наклоном плоскостей к внешним сторонам платформы для скатывании некорректно осуществляющих посадку мультикоптеров.
5. Корабельный динамический аэропричал мультикоптеров по п. 1, отличающийся тем, что для создания дополнительной подъемной силы по краям платформы, по меньшей мере, установлены два вспомогательных воздушных винта с электрическими двигателями.
| Стабилизированная платформа | 2018 |
|
RU2711720C1 |
| ИНДУКЦИОННАЯ НАГРЕВАТЕЛЬНАЯ УСТАНОВКА | 0 |
|
SU205857A1 |
| Способ накатки резьбы цилиндрическими накатниками | 1956 |
|
SU109096A1 |
| US 20090242693 A1, 01.10.2009. | |||

