Изобретение относится к медицинской технике, применяемой в травматологии и ортопедии с использованием аппаратов наружного остеосинтеза, основанных на принципе закрепления костных отломков при помощи колец и спиц, проходящих через кольца и костные отломки.
Существующие аппараты для остеосинтеза не отслеживают положение костных отломков и прогиб спиц в процессе лечения перелома и требуют периодических рентгенологических исследований для контроля процесса лечения перелома. Это вызывает возможное некачественное лечение перелома и неправильное сращивание костей с сопутствующими осложнениями, а также избыточную лучевую нагрузку на пациента.
Известны различные пути улучшения качества лечения перелома за счет применения электрического привода и средств его управления. Одним из таких путей является использование в аппарате с электрическим приводом обратных связей по координатам костных отломков и спиц при его автоматической работе.
Известен компрессионно-дистракционный аппарат (а.с. 1122308 СССР, МКИ А61В 17/18. Компрессионно-дистракционный аппарат / Г.А. Илизаров, Ф.Я. Руц, В.А. Немков, Э.В. Бурлаков и В.М. Комаров), содержащий подвижное кольцо и спицы, которые составляют узел для перемещения костных отломков. Компрессионно-дистракционный аппарат также содержит неподвижное кольцо и спицы, которые составляют узел для жесткой фиксации компрессионно-дистракционного аппарата на кости. Кроме того, аппарат содержит резьбовые стержни, соединяющие подвижное и неподвижное кольца, электрический привод, блок управления, который составляет узел для управления компрессионно-дистракционным аппаратом, и источник питания.
Компрессионно-дистракционный аппарат позволяет автоматизировать сопоставление (репозицию) костных отломков с постоянным и равномерным растяжением, что является его достоинством.
Недостаток данного аппарата заключается в невозможности индивидуального перемещения резьбовых стержней - все четыре резьбовых стержня перемещаются одновременно, кроме того, при потере питания невозможно отследить на какую величину были перемещены резьбовые стержни компрессионно-дистракционного аппарата в процессе лечения перелома.
Наиболее близким по технической сущности заявляемому устройству является ортопедический аппарат остеосинтеза (патент РФ №2339332, МПК А61В 17/66, F16H 25/22, F16H 1/34, опубл. 27.11.2008).
Ортопедический аппарат остеосинтеза содержит подвижное кольцо и спицы, которые составляют узел для перемещения костных отломков. Ортопедический аппарат остеосинтеза также содержит неподвижное кольцо и спицы, которые составляют узел для жесткой фиксации ортопедического аппарата остеосинтеза на кости. Кроме того, аппарат содержит электрический привод, микроЭВМ управления работой аппарата с пультом управления, которые составляют узел для управления ортопедическим аппаратом остеосинтеза, и источник питания.
Электрический привод состоит из трех приводов линейного перемещения и микроконтроллера управления приводами. Каждый привод линейного перемещения состоит из корпуса, шагового электродвигателя, штока, датчика измерения величины перемещения штока и датчика измерения величины усилия на штоке. Приводы линейного перемещения соединяют подвижное и неподвижное кольца. Вход каждого датчика измерения величины перемещения штока и каждого датчика измерения величины усилия соединен с источником питания, а его выход соединен с соответствующим входом узла для управления ортопедическим аппаратом остеосинтеза. Один вход микроконтроллера управления приводами соединен с узлом для управления ортопедическим аппаратом остеосинтеза, а другой вход - с источником питания. Каждый выход упомянутого микроконтроллера соединен с соответствующим входом каждого шагового электродвигателя.
Ортопедический аппарат остеосинтеза работает следующим образом. В область перелома конечности накладывается ортопедический аппарат остеосинтеза. С пульта управления в микроЭВМ вводятся значения величины перемещения, скорости штока, а также направление перемещения штока каждого привода линейного перемещения, соответствующие выбранному курсу лечению. МикроЭВМ подает управляющие сигналы на микроконтроллер управления шаговыми электродвигателями. Микроконтроллер управления шаговыми электродвигателями подает импульсы на каждый шаговый электродвигатель, что приводит к перемещению соответствующего штока и, соответственно, подвижного кольца. Изменение положения подвижного кольца приводит к изменению положения костных отломков, что обеспечивает сращивание кости. Датчики измерения величин перемещений штоков и датчики измерения величин усилий на штоках регистрируют значения величин перемещений и усилий на штоках и передают данные в узел для управления ортопедическим аппаратом остеосинтеза. В случае необходимости программа перемещения костных отломков корректируется вручную с пульта управления путем ввода новых значений величин и скоростей перемещений штоков, а в случае необходимости и изменения направления перемещения штока каждого привода линейного перемещения в зависимости от выбранного курса лечения.
Достоинство ортопедического аппарата остеосинтеза заключается в регистрации перемещений штоков приводов линейного перемещения и усилий на штоках, что позволяет корректировать программу перемещений штоков приводов линейного перемещения ортопедического аппарата остеосинтеза в соответствии с выбранным курсом лечения.
Недостатки ортопедического аппарата остеосинтеза - наблюдение за величинами перемещений штоков приводов линейного перемещения и усилий на штоках не дает хирургу полной картины процесса сращивания костных отломков, а именно информацию о характере перемещения костных отломков и расстояниях между ними, характере прогиба спиц, вследствие этого ручная корректировка процесса работы ортопедического аппарата остеосинтеза путем ввода новых данных с пульта управления в узел для управления недостаточна для обеспечения качественного лечения перелома, кроме того, требуется регулярное наблюдение хирурга и рентгенологические исследования.
Задача, решаемая изобретением, заключается в разработке аппарата для остеосинтеза, позволяющего улучшить условия регенерации костной ткани и автоматизировать процесс сращивания костных отломков без осложнений в части травмирования кровеносных сосудов и нервных тканей, неправильного сращивания костных отломков, а также без регулярных рентгенологических исследований за счет использования в электрическом приводе обратной связи по координатам костных отломков и спиц.
Для решения поставленной задачи в аппарате для остеосинтеза, содержащем узел для перемещения костных отломков, узел для жесткой фиксации аппарата для остеосинтеза на кости, электрический привод, узел для управления и источник питания, дополнительно введена система измерения координат костных отломков и спиц, которая состоит из индуктивных датчиков положения костных отломков и спиц, генератора переменного электромагнитного поля и измерительного блока, и размещается на подвижном кольце узла для перемещения костных отломков, а электрический привод выполнен в виде электроцилиндров со встроенными блоками управления электродвигателями.
Признаками, отличающими заявляемое решение от прототипа, являются снабжение аппарата для остеосинтеза системой измерения координат костных отломков и спиц, которая состоит из индуктивных датчиков положения костных отломков и спиц, генератора переменного электромагнитного поля и измерительного блока, выполнение электропривода в виде электроцилиндра с интеграцией всех элементов привода в один мехатронный модуль для уменьшения места, занимаемого электроприводом на аппарате для остеосинтеза, и новых взаимосвязей.
Наличие существенных отличительных признаков в совокупности существенных признаков заявляемого решения свидетельствует о соответствии заявляемого решения критерию охраноспособности «новизна».
Благодаря отличительным признакам происходит повышение качества лечения перелома в виде улучшения условий регенерации костной ткани, уменьшения травмирования кровеносных сосудов и нервных тканей, уменьшения лучевой нагрузки на пациента, что позволяет осуществлять лечение перелома с повышенной точностью и надежностью работы аппарата для остеосинтеза за меньший срок лечения перелома.
Это обусловлено тем, что внедрение системы измерения координат костных отломков и спиц и использование компактного электропривода в виде электроцилиндров позволяет в режиме реального времени отслеживать изменения координат костных отломков и спиц, а также периодичность, величины перемещений и усилий штоков электроцилиндров и корректировать программу лечения перелома в автоматическом режиме без участия хирурга.
Таким образом, в результате решения поставленной задачи меняется традиционный процесс лечения перелома за счет его автоматизации с повышением точности перемещения костных отломков при работе электропривода с системой измерения координат костных отломков и спиц, уменьшением лучевой нагрузки на пациента и трудоемкости обслуживания аппарата для остеосинтеза.
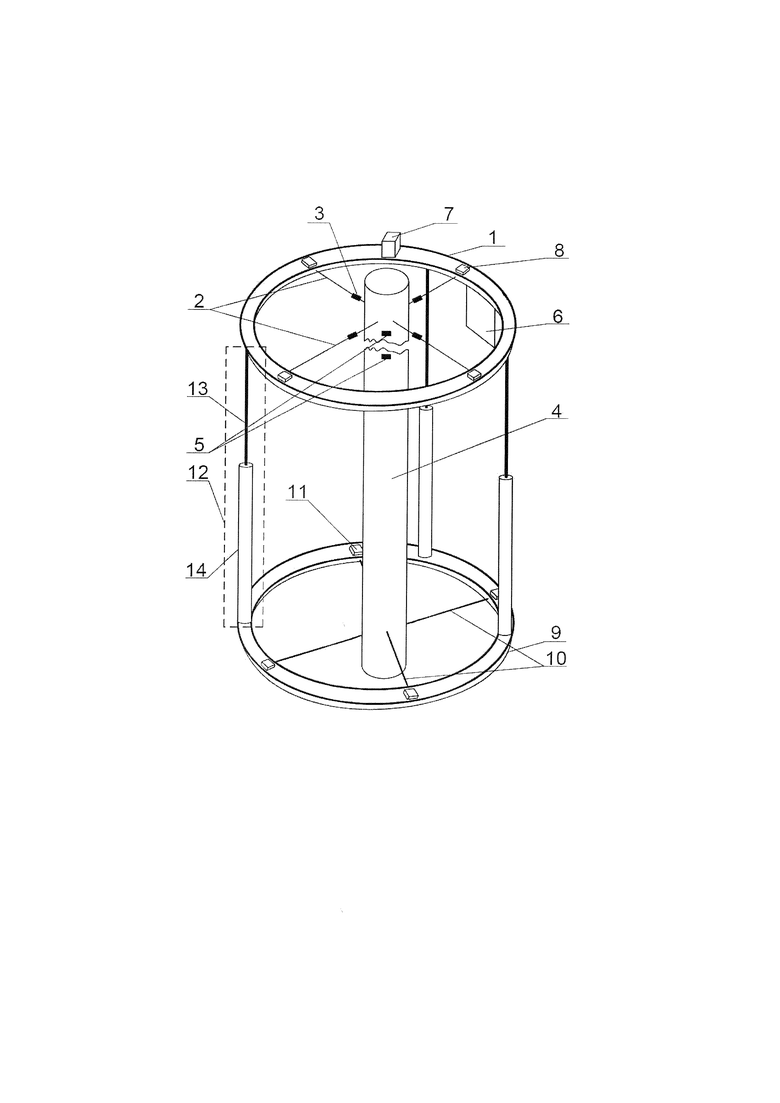
Общий вид аппарата для остеосинтеза представлен на чертеже.
Аппарат для остеосинтеза содержит узел для перемещения костных отломков, узел для жесткой фиксации аппарата для остеосинтеза на кости, электрический привод, узел для управления аппаратом для остеосинтеза и источник питания.
Узел для перемещения костных отломков выполнен в виде подвижного кольца 1, по крайней мере двух спиц 2, по крайней мере четырех индуктивных датчиков для определения положения спиц 3 подвижного кольца 1 для каждой спицы 2, по крайней мере двух индуктивных датчиков для определения положения костных отломков 5, генератора переменного электромагнитного поля 6 и измерительного блока 7. Подвижное кольцо 1 выполнено по крайней мере с четырьмя фиксаторами спиц 8, которые предназначены для жесткого закрепления спиц 2 на подвижном кольце 1. Каждая спица 2 предназначена для жесткой фиксации на кости 4 и, проведенная сквозь кость, жестко закреплена в фиксаторах спиц 8 перпендикулярно к оси кости 4. Каждый индуктивный датчик для определения положения спиц 3 подвижного кольца 1 предназначен для определения значений координат каждой спицы 2 в месте перелома конечности и жестко закреплен на соответствующей спице 2. Каждый индуктивный датчик для определения положения костных отломков 5 предназначен для определения значений координат костных отломков и после установки аппарата для остеосинтеза жестко закреплен на кости 4. Каждый упомянутый индуктивный датчик связан электрически с измерительным блоком 7. Генератор переменного электромагнитного поля 6 предназначен для генерации переменного электромагнитного поля низкой частоты и жестко установлен на подвижном кольце 1. Упомянутый генератор 6 связан электрически с источником питания и индуктивно с каждым индуктивным датчиком для определения положения спиц 3 подвижного кольца 1 и с каждым индуктивным датчиком для определения положения костных отломков 5. Измерительный блок 7 предназначен для оцифровывания электрических сигналов с каждого индуктивного датчика для определения положения спиц 3 подвижного кольца 1 и с каждого индуктивного датчика для определения положения костных отломков 5 в виде индукционных токов, пропорциональных изменению положения спиц 2 и костных отломков и жестко установлен на подвижном кольце 1. Один вход измерительного блока 7 электрически связан с источником питания, каждый из других его входов соединен с выходом соответствующего индуктивного датчика для определения положения спиц 3 подвижного кольца 1 и индуктивного датчика для определения положения костных отломков 5. Выход измерительного блока 7 соединен с одним из входов узла для управления аппаратом для остеосинтеза.
Узел для жесткой фиксации аппарата для остеосинтеза на кости включает неподвижное кольцо 9, по крайней мере две спицы 10, аналогичные спицам 2 узла для перемещения костей. Неподвижное кольцо 9 выполнено по крайней мере с четырьмя фиксаторами спиц 11, которые предназначены для жесткого закрепления спиц 10 на неподвижном кольце 9 и расположены аналогично фиксаторам спиц 8 подвижного кольца 1.
Электрический привод содержит по крайней мере три электроцилиндра 12. Каждый электроцилиндр 12 предназначен для соединения подвижного кольца 1 и неподвижного кольца 9 и состоит из штока 13, корпуса 14, в котором размещаются электродвигатель, силовая электроника и блок управления электродвигателями, датчика измерения величины перемещения штока и датчика измерения величины усилия на штоке. Вход каждого датчика измерения величины перемещения штока и каждого датчика измерения величины усилия на штоке соединен с источником питания, а выход соединен с соответствующим входом узла для управления аппаратом для остеосинтеза. При этом корпус 14 каждого электроцилиндра 12 жестко соединен с неподвижным кольцом 9, электродвигатель каждого электроцилиндра связан со штоком 13, а шток 13 - с подвижным кольцом 1. Блок управления электродвигателями предназначен для регулирования скорости и величины перемещения каждого электроцилиндра 12. Один вход каждого блока управления электродвигателями соединен с выходом узла для управления, а другой вход соединен с источником питания.
Узел для управления аппаратом для остеосинтеза выполнен в виде ЭВМ со специальным программным обеспечением, которая предназначена для автоматического выбора способа установки аппарата для остеосинтеза и автоматического расчета усилия, скорости, направления и величины перемещений штоков 13 каждого электроцилиндра 12. Вход узла для управления аппаратом для остеосинтеза соединен с источником питания.
Аппарат для остеосинтеза работает следующим образом: на узел для управления аппаратом для остеосинтеза подается сетевое напряжение. Предварительно перед установкой аппарата для остеосинтеза делается рентгеновский снимок поврежденной конечности, который загружается в узел для управления аппаратом для остеосинтеза. Узел для управления аппаратом для остеосинтеза показывает на своем дисплее способ установки аппарата для остеосинтеза и, соответственно, места для расположения спиц 2 и 10, опираясь на рентгеновский снимок. Затем в этих местах сверлятся отверстия в кости 4. В область перелома конечности накладывается аппарат для остеосинтеза, причем одно кольцо располагается выше перелома, а другое - ниже перелома. Для этого каждая спица 2 проводится через соответствующее отверстие в кости 4 и закрепляется в фиксаторе спиц 8 подвижного кольца 1. Каждая спица 10 проводится через соответствующее отверстие в кости 4 и закрепляется в фиксаторе спиц 11 неподвижного кольца 9. На каждую спицу 2 подвижного кольца 1 в область перелома конечности устанавливаются индуктивные датчики для определения положения спиц 3. На костные отломки в область перелома устанавливаются индуктивные датчики для определения положения костных отломков 5. На генератор переменного электромагнитного поля 6, на измерительный блок 7, на датчики измерения величин перемещений штоков и датчики измерения величин усилий на штоках подается напряжение с источника питания. Генератор переменного электромагнитного поля 6 преобразует напряжение с источника питания в переменное электромагнитное поле низкой частоты, которое в упомянутых индуктивных датчиках 3 и 5 индуцирует небольшие индукционные токи. Величина индукционного тока в каждом упомянутом индуктивном датчике 3 и 5 пропорциональна изменению значений координат спиц 3 и костных отломков. Индукционные токи с каждого индуктивного датчика 3 и 5 поступают в измерительный блок 7, в котором эти токи оцифровываются и передаются в узел для управления аппаратом для остеосинтеза. Данные с датчиков измерения величин перемещений штоков и датчиков измерения величин усилий на штоках передаются в узел для управления аппаратом для остеосинтеза.
После установки аппарата для остеосинтеза вновь делается рентгеновский снимок поврежденной конечности с установленным аппаратом для остеосинтеза для контроля правильной его установки. Рентгеновский снимок загружается в узел для управления аппаратом для остеосинтеза для создания 3D-модели кости с установленным аппаратом для остеосинтеза с расположением кровеносных сосудов и нервных тканей с первичными значениями координат каждого индуктивного датчика 3 и 5, по которой автоматически рассчитывается величина и скорость перемещений каждого из штоков 13 электроцилиндров 12 и усилие на каждом штоке 13 на весь период лечения перелома и в режиме реального времени, что позволяет корректировать процесс репозиции костных отломков в автоматическом режиме без участия хирурга, основываясь на индивидуальном процессе заживления перелома.
Узел для управления аппаратом для остеосинтеза вычисляет вторичные значения координат каждого индуктивного датчика 3 и 5 с последующим их сравнением с первичными значениями координат датчиков 3 и 5. По величине разницы значений координат в узле для управления аппаратом для остеосинтеза формируются управляющие сигналы, которые поступают на блок управления электродвигателями. Каждый блок управления электродвигателями в соответствии с управляющими сигналами осуществляет регулирование напряжения каждого из трех электроцилиндров 12. Под воздействием соответствующего напряжения шток 13 каждого электроцилиндра 12 перемещается на величину, заданную узлом для управления аппаратом для остеосинтеза. В результате перемещения штоков 13 электроцилиндров 12 происходит изменение положения подвижного кольца 1, обеспечивающее нормальное сращивание кости. По мере лечения перелома происходит сращивание костных отломков, при котором положение костных отломков и спиц изменяется, что, в свою очередь, приводит к изменению значений координат индуктивных датчиков для определения положения спиц 3 и индуктивных датчиков для определения положения костных отломков 5. По мере лечения процесс изменения положения подвижного кольца 1 повторяется.
В результате, такой аппарат для остеосинтеза позволяет в автоматическом режиме в зависимости от расположения кровеносных сосудов и нервных тканей регулировать процесс сращивания костных отломков с точностью определения координат индуктивных датчиков положения костных отломков и спиц около 10 мкм, точностью определения положения индуктивных датчиков в пространстве около 0,30° и шагом перемещения штока электроцилиндра электропривода около 3 мкм.
Целесообразной областью применения предлагаемого устройства являются травматология и ортопедия в части регенерации костной ткани при переломах конечностей или удлинения (укорочения) конечностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛЕЧЕНИЯ ПОЛИФОКАЛЬНЫХ ПЕРЕЛОМОВ КОСТЕЙ ТАЗА С ПЕРЕЛОМАМИ ВЕРТЛУЖНОЙ ВПАДИНЫ | 1998 |
|
RU2157669C2 |
| УСТРОЙСТВО ВНЕШНЕЙ ФИКСАЦИИ ДЛЯ ЛЕЧЕНИЯ ПЕРЕЛОМОВ ТАЗОВЫХ КОСТЕЙ | 1997 |
|
RU2128020C1 |
| Ортопедический трансформер | 2017 |
|
RU2687610C2 |
| СПОСОБ ЛЕЧЕНИЯ ВНУТРИСУСТАВНЫХ ПЕРЕЛОМОВ ДИСТАЛЬНОГО ОТДЕЛА ПЛЕЧА | 2007 |
|
RU2361531C1 |
| АППАРАТ ДЛЯ ЛЕЧЕНИЯ СОЧЕТАННЫХ ПЕРЕЛОМОВ КОСТЕЙ ТАЗА И БЕДРА | 2020 |
|
RU2749897C1 |
| АППАРАТ ВНЕОЧАГОВОЙ ФИКСАЦИИ И РЕПОЗИЦИИ | 2001 |
|
RU2207079C2 |
| АППАРАТ ДЛЯ НАРУЖНОГО ЧРЕСКОСТНОГО ОСТЕОСИНТЕЗА КОНЕЧНОСТЕЙ | 1996 |
|
RU2111717C1 |
| СПОСОБ ЛЕЧЕНИЯ РЕФРАКТУРЫ БЕДРЕННОЙ КОСТИ, ОСЛОЖНИВШЕЙ ПЕРИПРОТЕЗНЫЙ ПЕРЕЛОМ ПРИ ОСТЕОПОРОЗЕ | 2015 |
|
RU2585140C1 |
| УСТРОЙСТВО ДЛЯ ВНЕОЧАГОВОГО ОСТЕОСИНТЕЗА ОТКРЫТЫХ ПЕРЕЛОМОВ ГОЛЕНИ | 2014 |
|
RU2572300C1 |
| Аппарат Г.А.Илизарова для чрезкостного остеосинтеза | 1981 |
|
SU1055499A1 |
Изобретение относится к медицинской технике, применяемой в травматологии и ортопедии с использованием аппаратов наружного остеосинтеза. Аппарат для остеосинтеза содержит узел для перемещения костных отломков, узел для жесткой фиксации аппарата для остеосинтеза на кости, электрический привод, узел для управления аппаратом для остеосинтеза, источник питания. Система измерения координат костных отломков и спиц аппарата состоит из индуктивных датчиков положения костных отломков и спиц, генератора переменного электромагнитного поля и измерительного блока, которые размещены на подвижном кольце узла для перемещения костных отломков. Электрический привод выполнен в виде электроцилиндров со встроенными блоками управления электродвигателями. Каждый индуктивный датчик для определения положения спиц подвижного кольца жестко закреплен на соответствующей спице. Каждый индуктивный датчик для определения положения костных отломков жестко закреплен на кости. Все упомянутые индуктивные датчики связаны электрически с измерительным блоком. Генератор связан электрически с источником питания и индуктивно с каждым индуктивным датчиком для определения положения спиц подвижного кольца и положения костных отломков. Достигается повышение качества лечения перелома в виде улучшения условий регенерации костной ткани, уменьшения травмирования кровеносных сосудов и нервных тканей, уменьшения лучевой нагрузки на пациента, что позволяет осуществить лечение перелома с повышенной точностью и надежностью работы аппарата для остеосинтеза за меньший срок лечения перелома. Корректировка программы лечения перелома в автоматическом режиме без участия хирурга. 1 ил.
Аппарат для остеосинтеза, содержащий узел для перемещения костных отломков, узел для жесткой фиксации аппарата для остеосинтеза на кости, электрический привод, узел для управления аппаратом для остеосинтеза и источник питания, отличающийся тем, что он дополнительно снабжен системой измерения координат костных отломков и спиц, которая состоит из индуктивных датчиков положения костных отломков и спиц, генератора переменного электромагнитного поля и измерительного блока, размещенных на подвижном кольце узла для перемещения костных отломков, а электрический привод выполнен в виде электроцилиндров со встроенными блоками управления электродвигателями, причем каждый индуктивный датчик для определения положения спиц подвижного кольца жестко закреплен на соответствующей спице, каждый индуктивный датчик для определения положения костных отломков жестко закреплен на кости, все упомянутые индуктивные датчики связаны электрически с измерительным блоком, генератор связан электрически с источником питания и индуктивно с каждым индуктивным датчиком для определения положения спиц подвижного кольца и положения костных отломков, один вход измерительного блока электрически связан с источником питания, остальные входы соединены с выходами соответствующих индуктивных датчиков для определения положения спиц подвижного кольца и индуктивных датчиков для определения положения костных отломков, а выход измерительного блока соединен с одним из входов узла для управления аппаратом для остеосинтеза.
| RU 2006103056 А, 20.08.2007 | |||
| 0 |
|
SU160190A1 | |
| RU 2003129632 С2, 27.03.2005 | |||
| Аппарат для вязки снопов | 1960 |
|
SU137717A1 |
| US 5769078 A, 23.06.1998. | |||

