Изобретение относится к ультразвуковым системам обнаружения препятствий, предназначенным для регистрации и обработки сигналов, получаемых с ультразвуковых датчиков, и может быть использовано в автономных или дистанционно управляемых транспортных средствах для определения расстояний до препятствий.
Обнаружение препятствий основано на методе импульсной ультразвуковой локации, при котором на основании интервала времени, прошедшего между посылкой зондирующего импульса и получением эхо-ответа, вычисляется расстояние до отражающего ультразвук препятствия. В большинстве систем обнаружения препятствий излучатели/приемники ультразвука монтируются по периметру транспортного средства так, чтобы диаграммы направленности различных излучателей/приемников не перекрывались или перекрывались в незначительной степени.
Известна система управления (см. патент RU 2386507, 20.04.2010), обнаруживающая препятствия движению. Система управления содержит средства обнаружения объектов, расположенных на траектории движения или рядом с ней, и средства обработки данных и управления, выполненные с возможностью определения расстояния. Средства обнаружения объектов на траектории движения содержат светоизлучающие средства, выполненные с возможностью освещения области около указанной траектории, и светоприемные средства, выполненные с возможностью приема света, прошедшего через указанную область, так что находящиеся в ней объекты отбрасывают тени на светоприемные средства, которые находятся во взаимодействии со средствами обработки данных и управления, так что они определяют наличие препятствий в упомянутой области на основе изображений, полученных указанными светоприемными средствами. Средства обработки данных и управления содержат средства запоминания, которые выполнены с возможностью хранения изображений, полученных светоприемными средствами, в качестве известных изображений. Недостатками указанной системы являются: - недостаточная точность констатации конфигуративной сложности обнаруженного объекта; - невозможность обеспечить четкое обнаружение объектов при наличии атмосферных осадков; - невозможность обеспечить обнаружение объектов различной структуры (твердых, жидких, зернообразных и порошкообразных), прозрачности и цвета.
Известна также ультразвуковая система обнаружения препятствий, описанная в патенте (RU 2634603, 01.11.2017) и наиболее близкая к заявляемому изобретению, обладающая  излучателями/приемниками ультразвукового излучения с возможностью поочередного излучения зондирующих ультразвуковых импульсов каждым излучателем/приемником и последующим параллельным приемом эхо-ответов всеми излучателями/приемниками. На основании интервала времени, прошедшего между моментом излучения ультразвукового сигнала
излучателями/приемниками ультразвукового излучения с возможностью поочередного излучения зондирующих ультразвуковых импульсов каждым излучателем/приемником и последующим параллельным приемом эхо-ответов всеми излучателями/приемниками. На основании интервала времени, прошедшего между моментом излучения ультразвукового сигнала  -м излучателем и приемом его
-м излучателем и приемом его  -м приемником (
-м приемником ( ), строится эллипс, описывающий возможные положения отражающего ультразвуковые колебания объекта в пространстве, окружающем дистанционно управляемое транспортное средство. Для построения картины окружающих дистанционно управляемое транспортное средство препятствий производится суммирование независимых пересечений, полученных на этапе сбора данных эллипсов. Построенная картина, тем не менее, не обладает достаточной точностью отображения конфигуративной сложности объектов, окружающих дистанционно управляемое транспортное средство, поскольку независимые пересечения эллипсов образуются как вследствие отражения от объектов, окружающих дистанционно управляемое транспортное средство, так и вследствие погрешностей оцифровки сигналов приемников ультразвукового излучения, детектирования отраженных от препятствий импульсов и измерения временных интервалов между излучением сигнала -м излучателем и приемом его -м приемником.
), строится эллипс, описывающий возможные положения отражающего ультразвуковые колебания объекта в пространстве, окружающем дистанционно управляемое транспортное средство. Для построения картины окружающих дистанционно управляемое транспортное средство препятствий производится суммирование независимых пересечений, полученных на этапе сбора данных эллипсов. Построенная картина, тем не менее, не обладает достаточной точностью отображения конфигуративной сложности объектов, окружающих дистанционно управляемое транспортное средство, поскольку независимые пересечения эллипсов образуются как вследствие отражения от объектов, окружающих дистанционно управляемое транспортное средство, так и вследствие погрешностей оцифровки сигналов приемников ультразвукового излучения, детектирования отраженных от препятствий импульсов и измерения временных интервалов между излучением сигнала -м излучателем и приемом его -м приемником.
Предлагаемое изобретение позволяет повысить точность определения конфигуративной сложности препятствий, окружающих автономное или дистанционно управляемое транспортное средство, в результате чего обеспечивается эффективность автоматического планирования траектории движения автономного или дистанционно управляемого транспортного средства.
Структурная схема системы представлена на рисунке (фиг. 1). Повышение точности определения конфигуративной сложности препятствий достигается за счет использования системы содержащей (для примера – 4) излучателей/приемников ультразвуковых импульсов (1 – 4), выходы которых подключены ко входам соответствующих формирователей цифровых импульсов (7 – 10), а входы возбуждения – к выходу задающего генератора (5); выходы формирователей цифровых импульсов (7 – 10) при этом подключены к входам остановки соответствующих блоков измерения временных интервалов (13 – 16), входы запуска блоков измерения временных интервалов подключены к выходу распределителя импульсов запуска (6), а счетные входы блоков измерения временных интервалов подключены к генератору опорной частоты (12); цифровые выходы блоков измерения временных интервалов при этом подключены к соответствующим входам блока цифровой обработки (17), вход начала цикла которого подключен к выделенному выходу распределителя импульсов запуска (6), выходы распределителя импульсов запуска подключены к соответствующим входам излучателей/приемников ультразвуковых импульсов (1 – 4); входы/выходы блока цифровой обработки подключены к входам/выходам интерфейсного блока (19), обеспечивающего взаимодействие системы обнаружения препятствий с внешними системами.
Работа системы заключается в циклическом поочередном излучении излучателями/приемниками (1 – 4) ультразвуковых импульсов и приеме эхо-сигналов, отраженных от препятствий, попадающих в общую диаграмму направленности всеми используемыми в системе излучателями/приемниками.
Один цикл работы системы включает в себя излучение зондирующих импульсов каждым из излучателей/приемников, входящих в систему, излучение зондирующего импульса и последующий его параллельный прием представляют собой один такт работы системы.
В каждом такте интервал времени  , прошедший с момента излучения зондирующего импульса -м излучателем и приема -м приемником прямо пропорционален сумме расстояний
, прошедший с момента излучения зондирующего импульса -м излучателем и приема -м приемником прямо пропорционален сумме расстояний  от излучателя до препятствия и
от излучателя до препятствия и  от препятствия до приемника :
от препятствия до приемника :
 (1)
(1)
где  – скорость распространения ультразвука в воздухе,
– скорость распространения ультразвука в воздухе,  – расстояние от излучателя до препятствия,
– расстояние от излучателя до препятствия, – расстояние от препятствия до приемника,
– расстояние от препятствия до приемника, – координаты препятствия в системе координат, связанной с транспортным средством,
– координаты препятствия в системе координат, связанной с транспортным средством,
 – координаты излучателя в системе координат, связанной с транспортным средством,
– координаты излучателя в системе координат, связанной с транспортным средством,
 – координаты приемника в системе координат, связанной с транспортным средством.
– координаты приемника в системе координат, связанной с транспортным средством.
В каждом -м такте решения уравнения (1) формируют множество точек  – эллипс, фокусами которого являются координаты излучателя и приемника (фиг. 2). В случае
– эллипс, фокусами которого являются координаты излучателя и приемника (фиг. 2). В случае  множество
множество  представляет собой окружность радиуса с центром . Попарные пересечения множеств и
представляет собой окружность радиуса с центром . Попарные пересечения множеств и  , полученных в -м такте работы системы как решения систем уравнений
, полученных в -м такте работы системы как решения систем уравнений
 ,
,
формируют множество точек окружающих транспортное средство препятствий  . В свою очередь, объединение множеств
. В свою очередь, объединение множеств  , полученных на каждом такте очередного цикла работы системы
, полученных на каждом такте очередного цикла работы системы  , формирует картину препятствий, окружающих транспортное средство (фиг. 3). Объединение частных множеств позволяет повысить точность определения конфигуративной сложности препятствий, окружающих беспилотное транспортное средство.
, формирует картину препятствий, окружающих транспортное средство (фиг. 3). Объединение частных множеств позволяет повысить точность определения конфигуративной сложности препятствий, окружающих беспилотное транспортное средство.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковая система обнаружения препятствий движению подвижного объекта | 2015 |
|
RU2634603C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ВЗАИМНОГО ПОЛОЖЕНИЯ ВЕДУЩЕГО И ВЕДОМОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2617727C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2837059C1 |
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
| Многофункциональный бортовой радиолокационный комплекс | 2017 |
|
RU2670980C9 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2005 |
|
RU2282875C1 |
| БОРТОВОЙ ОБНАРУЖИТЕЛЬ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ | 2019 |
|
RU2710363C1 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ УЛЬТРАЗВУКОВОЙ ДИАГНОСТИКИ | 2009 |
|
RU2424769C2 |
| СПОСОБ И УСТРОЙСТВО МНОГОФАКТОРНОЙ ЗАЩИТЫ ОБЪЕКТОВ ОТ МИНИАТЮРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2771865C1 |
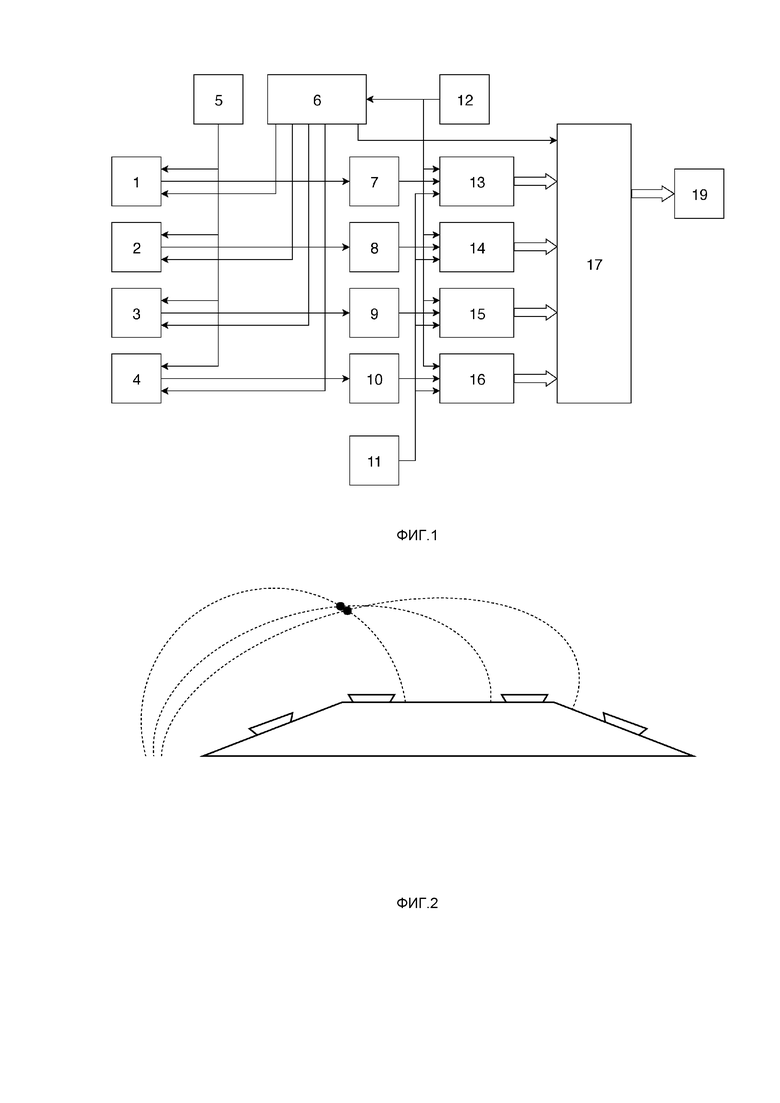
Изобретение относится к области ультразвукового обнаружения препятствий движению беспилотного транспортного средства, а именно к регистрации и обработке сигналов, получаемых с ультразвуковых датчиков, для определения расстояний до препятствий. Техническим результатом является повышение точности определения конфигуративной сложности препятствий, окружающих автономное или дистанционно управляемое транспортное средство, и эффективности автоматического планирования траектории его движения. Для этого система содержит несколько излучателей/приемников ультразвуковых импульсов, выходы которых подключены к формирователям импульсов, а входы возбуждения – к выходу задающего генератора; выходы формирователей импульсов подключены к входам остановки соответствующих блоков измерения временных интервалов, входы запуска которых подключены к выходу генератора импульсов запуска, счетные входы – к генератору опорной частоты, а цифровые выходы – к соответствующим входам блока цифровой обработки, вход начала цикла которого подключен к выделенному выходу распределителя импульсов запуска, выходы которого подключены к соответствующим входам излучателей/приемников ультразвуковых импульсов; входы/выходы блока цифровой обработки подключены к входам/выходам интерфейсного блока, обеспечивающего взаимодействие с внешними системами. 3 ил.
Ультразвуковая система обнаружения препятствий движению беспилотного транспортного средства, содержащая несколько излучателей/приемников ультразвуковых импульсов, выходы которых подключены к формирователям цифровых импульсов, а входы возбуждения – к выходу задающего генератора; выходы формирователей цифровых импульсов при этом подключены к входам остановки соответствующих блоков измерения временных интервалов, входы запуска которых подключены к выходу генератора импульсов запуска, а их счетные входы подключены к генератору опорной частоты; цифровые выходы блоков измерения временных интервалов при этом подключены к соответствующим входам блока цифровой обработки, вход начала цикла которого подключен к выделенному выходу распределителя импульсов запуска, выходы распределителя импульсов запуска подключены к соответствующим входам излучателей/приемников ультразвуковых импульсов; входы/выходы блока цифровой обработки подключены к входам/выходам интерфейсного блока, обеспечивающего взаимодействие системы обнаружения препятствий с внешними системами, отличающаяся тем, что обнаружение препятствий выполняется в ходе циклического сканирования окружающего беспилотное транспортное средство пространства, выполняемого за несколько (по количеству излучателей/приемников) тактов, в каждом из которых импульс, излученный одним из излучателей/приемников и отраженный от препятствий, принимается всеми приемниками, на основе решений пар уравнений, связывающих расстояния от излучателя до препятствия и от препятствия до приемника, определяется положение препятствия, а координаты препятствий, полученные в каждом такте, объединяются для получения картины окружающей беспилотное транспортное средство обстановки при завершении каждого цикла сканирования.
| Ультразвуковая система обнаружения препятствий движению подвижного объекта | 2015 |
|
RU2634603C2 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| CN 207292413 U, 01.05.2018 | |||
| US 6281786 B1, 28.08.2001 | |||
| US 6289282 B1, 11.09.2001 | |||
| УЛЬТРАЗВУКОВАЯ СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ, СПОСОБ ЕЕ КОНФИГУРИРОВАНИЯ И СООТВЕТСТВУЮЩИЙ УЛЬТРАЗВУКОВОЙ ДАТЧИК | 2009 |
|
RU2513097C2 |

