Изобретение относится к системам управления движением беспилотного летательного аппарата (БПЛА) для поиска, обнаружения и высокоточного приведения его к заданному объекту.
Известна система управления БПЛА, использующая в качестве радиолокационного визира (измерителя координат и параметров объекта назначения, или, иначе, координатора) одноканальную бортовую радиолокационную станцию (РЛС) сантиметрового диапазона с фазоманипулированным зондирующим сигналом [1, стр. 4], который обеспечивает более высокие точность сопровождения цели и помехозащищенность по отношению к активным и пассивным помехам, что известно, например, из [2, 3]. Кроме координатора система управления беспилотным летательным аппаратом содержит систему автопилотирования (автопилот), соединенную с бортовой электронно-вычислительной машиной (БЭВМ), которая выполнена с возможностью подключения к пульту предстартовой подготовки и ввода полетного задания, который расположен в месте старта БПЛА. Координатор содержит передатчик, в котором формируется импульсный зондирующий сигнал с изменением фазы несущей частоты псевдослучайным двоичным кодом, антенну, механически связанную с приводом антенны, приемник, синхронизатор, дальномер (счетчик дальности) и устройство обработки сигналов, включающее фильтр сжатия сигналов, пороговое и устройство фиксации координат, формирующее сигналы дальности и углового положения отраженных сигналов, поступающих в БЭВМ. БЭВМ определяет координаты истинной цели, сопоставляет данные о местоположении БПЛА, измеренные автопилотом, с данными о местоположении истинной цели и формирует сигналы коррекции курса БПЛА, поступающие на автопилот.
Недостатками аналога является низкая эффективность системы управления при необходимости приведения БПЛА к нерадиоконтрастному подвижному объекту-цели, а также снижение точности определения дальности до объекта-цели при длительном полете БПЛА из-за расхождения бортовой временной шкалы с истинной единой шкалой времени UTC [4] и, следовательно, к не точному приведению БПЛА к заданному объекту и не выполнению полетного задания.
Известна система управления беспилотным летательным аппаратом, которая по большинству существенных признаков принята за прототип [5]. Она включает автопилот, вход и выход которого соединены соответственно с первым выходом и вторым входом БЭВМ, первый вход которой является входом для подключения к пульту предстартовой подготовки и ввода полетного задания, и радиолокационный координатор с фазоманипулированным зондирующим сигналом, который содержит антенну, соединенную сигнальными входом и выходом с передатчиком и приемником соответственно и механически связанную с приводом антенны, синхронизатор, дальномер и устройство обработки сигналов, в состав которого входят фильтр сжатия сигналов, пороговое устройство и устройство фиксации координат, входы которого с первого по третий подключены соответственно к выходу порогового устройства, выходу дальномера и информационному выходу привода антенны, а выходы, на которых формируются значения величин дистанции и углового положения отраженных сигналов, подключены к четвертому и пятому входам БЭВМ, шестой вход которой и вход передатчика подключены к первому выходу синхронизатора, передающему импульсную последовательность с частотой зондирования, второй выход которого, передающий последовательность импульсов синхронизации, подключен ко второму входу дальномера, первый вход которого и вход приемника по сигналу окончания зондирующего импульса подключены ко второму выходу передатчика, гетеродинный выход которого соединен с гетеродинным входом приемника. Управляющие входы блока формирования порога, по сигналу признака режима и сигналу задания масштаба подключены соответственно к пятому и седьмому выходам БЭВМ, выход блока формирования порога подключен к уровневому входу порогового устройства, а соответствующие сигнальные входы - к выходам приемника, на которых формируются усредненное значение интенсивности шума и усредненное значение интенсивности отраженных сигналов, кодовый выход передатчика и выход видеосигнала приемника подключены к первым сигнальным входам соответственно первого и второго переключателей, управляющие входы которых соединены со вторым выходом БЭВМ, а вторые сигнальные входы подключены соответственно к третьему и четвертому выходам БЭВМ, с которых передаются последовательность бинарного массива измерений и последовательность эталонного бинарного массива, первый и второй входы фильтра сжатия сигналов подключены к выходам соответственно первого и второго переключателей, а его выход соединен с сигнальным входом третьего переключателя, управляющий вход которого подключен к шестому выходу БЭВМ, а соответствующие выходы - к сигнальному входу порогового устройства и сигнальному входу устройства фиксации максимума, выход которого, передающий сигнал, характеризующий местоположение бинарного массива измерений на эталонной карте, соединен с третьим входом БЭВМ. К недостаткам прототипа следует отнести:
- низкая эффективность системы при работе БПЛА по подвижному объекту-цели, так как оно предназначено для приведения его в заданную точку земной поверхности;
- снижение точности определения дальности до цели (при сравнении ее величины с заложенной при предполетной подготовке) при длительном полете БПЛА из-за расхождения бортовой временной шкалы с истинной единой шкалой времени UTC [4];
- низкая помехозащищенность РЛС из-за постоянной работы на одной частоте;
- низкая надежность, увеличенные масса и потребление энергии из-за использования антенны, связанной с электромеханическим приводом.
Технической задачей изобретения является повышение точности приведения БПЛА к подвижным объектам-целям на земной поверхности.
Указанный технический результат достигается тем, что в систему управления БПЛА, содержащую пульт предстартовой подготовки и ввода полетного задания, автопилот, подключенный двухсторонней связью к бортовой электронно-вычислительной машины (БЭВМ), радиолокационный координатор с фазоманипулированным зондирующим сигналом, который содержит антенну, соединенную сигнальными входом и выходом с передатчиком и приемником соответственно, синхронизатор, дальномер и устройство обработки сигналов, в состав которого входят три переключателя, устройство фиксации максимума, фильтр сжатия сигналов, пороговое устройство, блок формирования порога и устройство фиксации координат, входы которого подключены к выходу порогового устройства и выходу дальномера, а выходы, на которых формируются значения величин дистанции и углового положения отраженных сигналов, подключены к соответствующим входам БЭВМ, соответствующий вход которой и вход передатчика подключены к сигнальному выходу синхронизатора, передающему импульсную последовательность с частотой зондирования, второй выход синхронизатора, передающий последовательность импульсов синхронизации, подключен ко второму входу дальномера, первый вход которого и вход приемника по сигналу окончания зондирующего импульса подключены ко второму выходу передатчика, гетеродинный выход которого соединен с гетеродинным входом приемника, управляющие входы блока формирования порога по сигналу признака режима и сигналу задания масштаба подключены к соответствующим выходам БЭВМ, выход блока формирования порога подключен к уровневому входу порогового устройства, а его соответствующие сигнальные входы - к выходам приемника, на которых формируются усредненное значение интенсивности шума и усредненное значение интенсивности отраженных сигналов, кодовый выход передатчика и выход видеосигнала приемника подключены к первым сигнальным входам соответственно первого и второго переключателей, управляющие входы которых соединены с соответствующим выходом БЭВМ, а сигнальные входы первого и второго переключателей подключены к соответствующим сигнальным выходам БЭВМ, с которых передаются последовательность бинарного массива измерений и последовательность эталонного бинарного массива, первый и второй входы фильтра сжатия сигналов подключены к выходам соответственно первого и второго переключателей, а его выход соединен с сигнальным входом третьего переключателя, управляющий вход которого подключен к соответствующему выходу БЭВМ, а первый и второй выходы - к сигнальному входу порогового устройства и сигнальному входу устройства фиксации максимума, выход устройства фиксации максимума, передающий сигнал, характеризующий местоположение бинарного массива измерений на эталонной карте, соединен с соответствующим входом БЭВМ, дополнительно введены соединенные двухсторонними связями с БЭВМ модуль трехкоординатной электронной карты местности, где вероятность нахождения объекта-цели максимальна, модуль хранения масок, характерных для радиолокационных отображений объектов-целей, полученных с разных ракурсов в заданном частотном диапазоне, модуль хранения координат района нахождения заданных объектов-целей с расстановкой их по приоритетам, модуль подготовки и выполнения завершающей операции, приемник глобальных навигационных спутниковых систем с антенной, соединенный двухсторонними связями с синхронизатором, БЭВМ, а также с более чем тремя передатчиками, установленными на космических аппаратах, также БЭВМ соединена двухсторонними связями с передатчиком, пультом предстартовой подготовки и ввода полетного задания при выполнении процедур подготовки полета БПЛА и сбора донесений о работоспособности его узлов, соответствующий вход/выход БЭВМ предназначен для выдачи команд управления на двигательные установки и рули БПЛА, приема от них донесений о выполнении заданной команды, при этом антенна выполнена в виде фазированной антенной решетки, состоящей из п антенных излучателей, подключенных к параллельным цепочкам последовательно соединенных управляемых БЭВМ фазовращателей и переключателей «Прием-Передача», причем выход каждого переключателя в режиме «Прием» подключается через высокочастотное суммирующее устройство к приемнику, а вход каждого переключателя «Прием-Передача» в режиме «Передача» подключается через делитель мощности к передатчику.
В системе управления БПЛА устройство обработки сигналов при работе по объектам-целям сначала обнаруживает в просматриваемой зоне отраженные сигналы на фоне шума (т.е. сначала работает по своему прямому назначению), а затем переходит в режим сравнения и суммирования бинарных последовательностей, сформированных путем дополнительной пороговой обработки измеренного массива наблюдаемых сигналов и подготовленной заранее эталонной бинарной последовательности (маской). По результатам этого сравнения определяются координаты зоны измерений координатора, и положение БПЛА относительно заданной точки приведения, осуществляется совместно с БЭВМ распознавание объекта-цели.
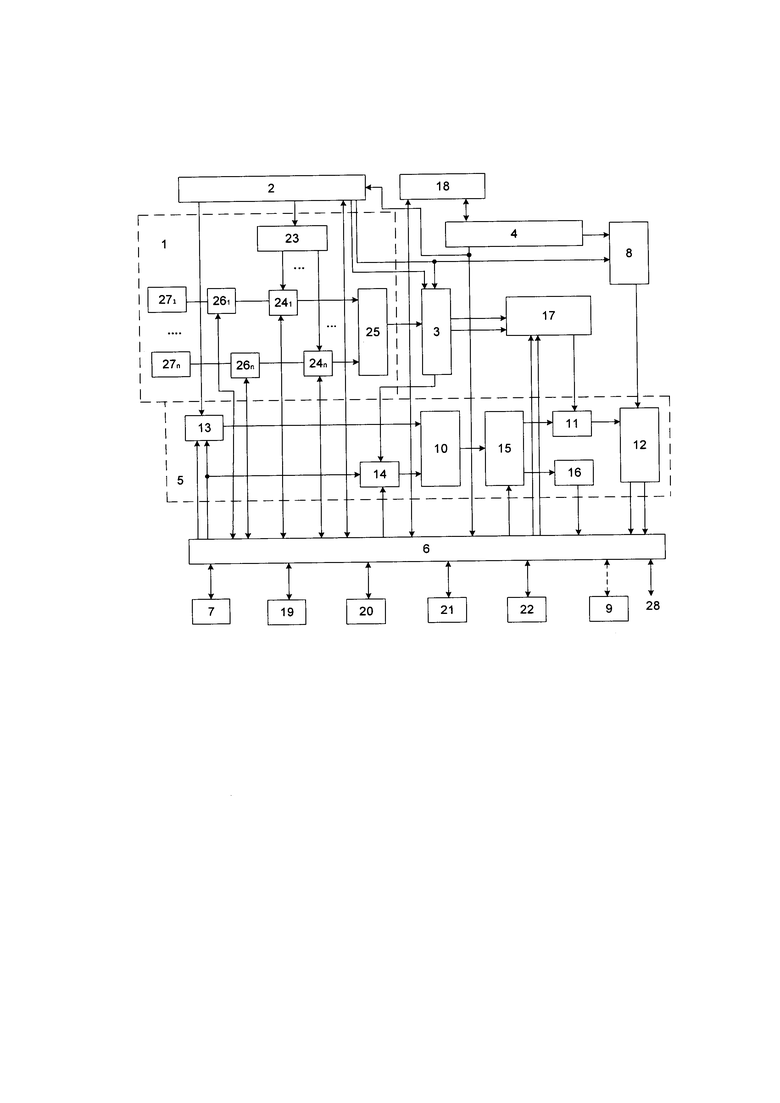
На фигуре представлена структурная схема системы управления БПЛА и приняты следующие обозначения:
1 - антенна, выполненная в виде фазированной антенной решетки,
2 - передатчик;
3 - приемник;
4 - синхронизатор;
5 - устройство обработки сигналов;
6 - бортовая электронно-вычислительная машина;
7 - автопилот;
8 - дальномер;
9 - пульт предстартовой подготовки и ввода полетного задания;
10 - фильтр сжатия сигналов;
11 - пороговое устройство;
12 - устройство фиксации координат;
13 - первый переключатель;
14 - второй переключатель;
15 - третий переключатель;
16 - устройство фиксации максимума;
17 - блок формирования порога;
18 - приемник глобальных навигационных спутниковых систем с антенной, соединенный с синхронизатором, а также с передатчиками, установленными на космических аппаратах;
19 - модуль хранения координат района нахождения заданных объектов-целей с расстановкой их по приоритетам;
20 - модуль точной трехкоординатной электронной карты местности, где вероятность нахождения объекта-цели максимальна;
21 - модуль хранения масок, характерных для радиолокационных отображений объектов-целей, полученных с разных ракурсов в заданном частотном диапазоне;
22 - модуль подготовки и выполнения завершающей операции;
23 - делитель мощности;
24 - переключатель «Прием-Передача», управляемый БЭВМ 6;
25 - высокочастотное суммирующее устройство;
26 - фазовращатель, управляемый БЭВМ 6;
27 - антенный излучатель;
28 - вход/выход БЭВМ, предназначенный для выдачи команд управления на двигательные установки и рули БПЛА и приема от них донесений о выполнении заданной команды.
Сущность изобретения заключается в том, что для повышения точности приведения БПЛА к подвижным объектам-целям на земной поверхности в процесс управления БПЛА добавлены процедуры:
непрерывной подсинхронизации цифровых схем синхронизатора 4 с помощью точных односекундных меток приемника 18 глобальных навигационных спутниковых систем, соединенного с передатчиками, установленными на космических аппаратах (не показанными на фигуре), число которых должно быть более трех, чтобы исключить неточность измерения дальности до объекта-цели из-за расхождения бортовой временной шкалы с истинной шкалой единого мирового времени при длительном полете БПЛА;
использования постоянного сравнения текущих координат БПЛА с координатами точной трехкоординатной электронной карты местности, района предполагаемого нахождения объекта-цели (объектов-целей) с его параметрами движения, заданными в полетном задании при предстартовой подготовке, выдачи команд с БЭВМ 6 по входу/выходу 28 на двигательные установки БПЛА (не показанные на фигуре) при расхождении БПЛА от заданного курса;
хранения электронных масок, характерных для радиолокационных отображений объектов-целей, полученных с разных ракурсов в заданном частотном диапазоне, введенных в полетном задании при предстартовой подготовке и позволяющих точно определить нужный объект на местности методом корреляции цифрового радиолокационного отображения участка местности с одной из цифровых масок, заложенных в модуль 21 при предстартовой подготовке;
ввода модуля подготовки и выполнения завершающей операции, позволяющего с помощью БЭВМ 6 обеспечить точное приведение соответствующего груза до выбранного объекта-цели, выработать команду на проведение в модуле 22 заданной операции и провести завершающую операцию, например, сброс груза;
замены антенны с электромеханическим приводом на фазированную антенную решетку 1, которая позволяет узкой диаграммой направленности, управляемой с помощью сигналов БЭВМ 6, сканировать только узкий, заданный участок местности по курсу полета БПЛА и тем самым освободиться от помех, создаваемых в соседних точках местности, а также за счет электронного сканирования увеличить темп обзора поверхности Земли и, следовательно, получить более точные отображения объектов-целей за тот же интервал времени и тем самым повысить точность их распознавания и определения координат местоположения;
применения режима псевдослучайной перестройки рабочей частоты (ППРЧ) зондирующего сигнала в синхронизаторе 4 по управляющим сигналам БЭВМ 6 при работе в помехах с помощью использования известных операций технологии «когнитивное радио» [6], например, мониторинга радиочастотного спектра путем оценки уровня помех на каждой рабочей точке радиолокатора, например, в каждом 32-м периоде повторения, выбора наиболее оптимальной частоты (с минимальным уровнем помех) на следующие периоды повторения.
Согласно фигуре в системе управления БПЛА к сигнальному выходу синхронизатора 4 (выходу импульсной последовательности с частотой зондирования) подключены вход передатчика 2 и соответствующий вход БЭВМ 6, а к его выходу (последовательности синхронизирующих импульсов) - второй (счетный) вход дальномера 8, первый вход которого и второй вход приемника 3 (по сигналу окончания зондирующего импульса) подключены ко второму выходу передатчика 2. Первый (сигнальный) выход передатчика 2 подключен к антенне 1, сигнальный выход которой подключен к первому входу приемника 3.
Второй выход передатчика 2 соединен с соответствующими входами приемника 3 и дальномера 8, его гетеродинный выход соединен с гетеродинным входом приемника 3, а его кодовый выход подключен к первому сигнальному входу первого переключателя 13. Выход видеосигнала приемника 3 подключен к первому сигнальному входу второго переключателя 14, а выход, на котором формируется усредненное значение интенсивности шума (выход ШАРУ -процедура автоматической регулировки уровня шумов), и выход, на котором формируется усредненное значение интенсивности отраженных сигналов (выход АРУ - процедура автоматической регулировки усиления), соединены с соответствующими сигнальными входами блока 17 формирования порога, выход которого подключен к уровневому входу порогового устройства 11.
Выход порогового устройства 11 соединен с соответствующим входом устройства 12 фиксации координат, другой вход которого подключен к выходу дальномера 8, а два выхода, на которых формируются значения величин дистанции и углового положения отраженных сигналов, подключены к соответствующим входам БЭВМ 6, соединенной двусторонней связью с автопилотом 7, а соответствующий вход/выход является входом/выходом для подключения к пульту 9 предстартовой подготовки, приема сигналов контроля работоспособности с узлов БПЛА и ввода полетного задания.
К двум выходам третьего переключателя 15 подключены соответственно сигнальный вход порогового устройства 11 и сигнальный вход устройства 16 фиксации максимума. Сигнальный вход третьего переключателя 15 подключен к выходу фильтра 10 сжатия сигналов, оба входа которого соединены с выходами первого и второго переключателей 13 и 14 соответственно. Управляющие входы первого и второго переключателей 13, 14 подключены к соответствующим выходам БЭВМ 6. Соответствующий выход БЭВМ 6 соединен с управляющим входом третьего переключателя 15. Управляющий вход признака режима и управляющий вход задания масштаба блока 17 формирования порога соединены с соответствующими выходами БЭВМ 6.
Вход БЭВМ 6 соединяется с выходом устройства 16 фиксации максимума, на котором формируется сигнал, характеризующий местоположение бинарного массива измерений на эталонной карте, а выходы БЭВМ 6, с которых передаются последовательность бинарного массива измерений и последовательность эталонного бинарного массива, подключены к сигнальным входам соответственно первого и второго переключателей 13 и 14.
Антенна 1, передатчик 2, приемник 3, синхронизатор 4, дальномер 8 и устройство 5 обработки сигналов совместно с БЭВМ 6 выполняют функции радиолокационного координатора системы управления БПЛА.
Антенна 1 является частью координатора и выполнена в виде фазированной антенной решетки, состоящей из n антенных излучателей 27, соединенных через п параллельных цепочек последовательно соединенных фазовращателей 26, управляемых БЭВМ 6, переключателей 24 «Прием-Передача», подключенных к входам высокочастотного суммирующего устройства 25 и через него к высокочастотному входу приемника 3 в режиме «Прием» или через параллельные цепочки последовательно соединенных n антенных излучателей 27, фазовращателей 26, управляемых БЭВМ 6, переключателей 24 «Прием-Передача», подключенных к выходам делителя 23 мощности и через него к высокочастотному выходу передатчика 2 в режиме «Передача». Узлы 23, 24, 26, 27, второй и третий из которых управляются сигналами БЭВМ 6, выполняют функцию диаграммообразующей системы на передачу при излучении зондирующего сигнала, а узлы 25, 24, 26, 27, второй и третий из которых управляются сигналами БЭВМ 6, выполняют функцию диаграммообразующей системы на прием при приеме отраженных сигналов.
БЭВМ 6 в процессе сканирования вырабатывает информационные сигналы углового положения центра главного луча диаграммы направленности антенны 1 относительно корпуса летательного аппарата в текущий момент времени: ψа - угол поворота в горизонтальной плоскости и uа - угол поворота в вертикальной плоскости. Управление положением центра главного луча диаграммы направленности антенны 1 в обеих плоскостях идентично, поэтому, для простоты изложения, в дальнейшем рассматривается только поворот луча в горизонтальной плоскости. Подробно построение системы управления узлами антенны 1 радиолокационного координатора изложено, например, в работе [7].
Передатчик 2 может быть выполнен, например, в виде усилительной цепочки на лампе бегущей волны (ЛБВ) [5], в которой несущая частота возбудителя, изменяемая от периода к периоду, модулируется по фазе псевдослучайной М-последовательностью, формируемой генератором кода и фазовым манипулятором [8]. Частота повторения и длительность зондирующих импульсов передатчику задается синхронизатором 4 с помощью сигналов БЭВМ 6. Импульс, соответствующий моменту окончания зондирующего импульса, формируется на управляющем выходе усилителя мощности, который служит вторым выходом передатчика 2, а сигнальный выход усилителя мощности образует первый выход передатчика 2. Выход гетеродинной частоты передатчика 2 образует третий выход передатчика, а выход генератора кода, на котором формируется кодовая последовательность изменения фазы несущей частоты каждого излучаемого сигнала - u1, образует четвертый выход передатчика 2. Пример реализации передатчика с фазоманипулированным сигналом и входящих в него блоков известен, например, из [2, 3, 9].
Приемник 3 выполнен в виде последовательно соединенных усилителя высокой частоты, смесителя, второй вход которого образует гетеродинный (третий) вход приемника, усилителя промежуточной частоты (УПЧ) и видеоусилителя. Варианты построения приемника РЛС с фазоманипулированным сигналом изложены в [2, 3,9]. Важным обстоятельством является обязательное наличие в приемнике процедур ШАРУ и АРУ. Первый выход приемника 3 -основной выход видеоусилителя, на котором формируется последовательность иг видеосигналов, отраженных от наблюдаемых объектов, второй выход - выход схемы ШАРУ, на котором формируется цифровой сигнал аш, величина которого пропорциональна усредненному значению (уровню) интенсивности шума отраженных сигналов, третий выход - выход схемы АРУ, на котором формируется сигнал ас, пропорциональный усредненному значению интенсивности отраженных сигналов.
БЭВМ 6 представляет собой универсальную ЭВМ, которая с разделением во времени воспринимает информацию по входам и вырабатывает на соответствующих выходах информационные или управляющие сигналы. Построение БЭВМ известно и приведено в работах [10, 11]. В частности, может использоваться Micro PC фирмы "Octogon Systems" - 5066-586-133MHz-1 MB, 2 MB Flash CPU Card.
Основным навигационным прибором в системе является приемник 18 глобальных навигационных спутниковых систем, как обладающий высокими точностными характеристиками. При наличии помех и невозможности работы приемника 18 глобальных навигационных спутниковых систем используется автопилот 7. Автопилот 7 представляет собой систему гироскопических приборов (в простейшем случае гироазимут, гирогоризонт и три гироинтегратора), измеряющих с помощью БЭВМ 6 пройденный путь в стартовой системе координат: X - направление полета, заданное в точке старта, Y - высота полета, Z - боковое отклонение от вертикальной плоскости, совпадающей с направлением полета, заданным в точке старта, или, иначе, плоскости стрельбы. При отклонении измеряемых автопилотом текущих координат Yt и Zt при Xt от значений, заданных полетным заданием, автопилот автономно или при помощи БЭВМ 6 выдает управляющие сигналы на рулевые органы, при помощи которых приводятся в соответствие боковое отклонение от плоскости стрельбы Zt=Zn и высота полета Yt=Yn. Сведения, необходимые для реализации автопилота, приведены, например, в [12].
Известно также, что для управления БПЛА (в случае отсутствия возможности работы приемника 18 глобальных навигационных спутниковых систем) по высоте используется высотомер, показания которого в вертикальной плоскости могут оказаться точнее, чем у гироинтегратора, однако для существа предлагаемого изобретения это не имеет значения. По этой причине дальнейшее описание ограничивается только рассмотрением управления беспилотным летательным аппаратом в горизонтальной плоскости.
Для задания программы движения БПЛА в боковой плоскости (в случае отсутствия возможности работы приемника 18 глобальных навигационных спутниковых систем) используют установку нуля гироскопических приборов в азимутальной плоскости, совпадающую с направлением на цель - ψ (плоскость стрельбы). В этом случае автопилот отрабатывает возмущения, сводя рассогласование ΔZ (отклонение от плоскости стрельбы) к нулю. Путь, проходимый БПЛА по оси X, в этом случае соответствует текущей дистанции Dt от места старта до БПЛА. Конечная точка полета задается дистанцией Dk или координатами района поиска объекта-цели при его подвижности.
Расчет текущей дальности до предполагаемого объекта-цели осуществляется в БЭВМ 6 по данным приемника 18 глобальных навигационных спутниковых систем, а при отсутствии возможности его работы - с помощью дальномера 8. Дальномер 8 в рассматриваемой системе представляет собой счетчик синхроимпульсов, поступающих со второго выхода синхронизатора 4. Обнуление и запуск счетчика происходит по сигналу со второго выхода передатчика 2, поступающему на первый вход дальномера 8. Выход счетчика является выходом дальномера 8. Выходной сигнал дальномера 8 в последовательном или параллельном коде несет информацию о времени Т3, которое прошло после окончания импульса излучения [5]. Измеряемая дискретность (принятый дискрет времени Δτ) или цена младшего разряда счетчика составляют, например, 0,01 мкс, что соответствует дистанции 1,5 м. Число разрядов счетчика соответствует максимальной дистанции возможного наблюдения объекта-цели или периоду повторения зондирующих импульсов передатчика 2.
Пульт 9 предназначен для проверки исправности всех бортовых систем БПЛА во время предстартовой подготовки и ввода в БЭВМ 6 по входу/выходу 28 полетного задания. Перед запуском БПЛА ко всем бортовым приборам подводится электропитание от внешнего источника, и по результатам тестовой проверки узлы системы через БЭВМ 6 выдают донесения о готовности (или неисправности), по которым оператор принимает решение о возможности запуска БПЛА. После проверки исправности всех бортовых узлов и агрегатов в память БЭВМ 6 транслируется полетное задание в виде программы траектории полета и выполнения других процедур. При этом, в случае отсутствия возможности работы приемника 18 глобальных навигационных спутниковых систем в табличной форме, вводится планируемый маршрут, задаваемый в виде зависимостей координат Y(X) и Z(X), где X - продольная координата в плоскости стрельбы, Y - высота полета и Z - боковое отклонение от плоскости стрельбы. При помощи пульта 9 выставляется начальное положение гироприборов автопилота, соответствующее выбранной плоскости стрельбы [5]. Кроме этого, при помощи пульта 9 вводятся в БЭВМ 6 основные параметры по маскам объектов-целей и приоритету их обслуживания, координатам возможного нахождения, методу доставки груза в модуле 22, операции по логико-временной диаграмме, режимам работы бортовой аппаратуры и другие.
Аппаратура предстартовой проверки и ориентации гироскопических приборов известна, например, из [13-16]. Пульт представляет собой, например, терминал оператора, который содержит клавиатуру, монитор и центральный прибор управления и связи, включающий ЭВМ, монитор, клавиатуру, мышь, дополнительную память, специальное программное обеспечение для реализации соответствующих процедур формирования и ввода в БЭВМ 6 полетного задания и адаптеры, организующие сеть с БЭВМ 6 посредством интерфейсных магистралей. Примером одной из возможных реализаций пульта 9 может служить схема пульта оператора корабельной боевой информационно-управляющей системы [17].
Фильтр 10 сжатия сигналов содержит, например, запоминающий регистр и сдвиговый регистр, выходы которых поразрядно подключены ко входам многоразрядного элемента исключения ИЛИ, выход которого образует выход фильтра 10 сжатия сигналов. Входы регистров образуют первый и второй входы фильтра 10 [5].
Пороговое устройство 11 выполнено, например, в виде компаратора -усилителя постоянного тока с дифференциальным входом без внешней обратной связи. На его второй вход подается уровневый сигнал с выхода блока 17 формирования порога, который определяет уровень порога срабатывания компаратора, а на первый вход - сигнал U3 с выхода фильтра 10 сжатия через переключатель 15. Если величина сигнала U3 на выходе фильтра сжатия 10 больше порогового значения Uпор, то на выходе порогового устройства 11 появится нормированный сигнал постоянной амплитуды длительностью Δτ.
Устройство 12 фиксации координат представляет собой схему совпадения сигнала задержки времени Т3, поступающего с выхода дальномера 8, и сигналов углового положения главного луча антенного устройства 1 ψа, поступающих с БЭВМ 6, с управляющим сигналом-импульсом с выхода порогового устройства 11. При наличии управляющего импульса происходит запись величин на соответствующие выходные регистры дистанции до объекта-цели Dц=сТ3/2 (с - скорость распространения электромагнитного излучения) и угла ψа (аналогично, при необходимости угла Uа). Схема совпадения может быть выполнена в цифровом варианте - в виде триггерных регистров [5] или программно - в БЭВМ 6. Число выходных регистров в устройстве 12 фиксации координат определяется максимально возможным (допустимым для данного БПЛА) числом одновременно наблюдаемых объектов-целей, среди которых по определенным признакам (например, по маске - радиолокационному портрету объекта-цели в используемом диапазоне частот) определяется объект назначения, на который наводится БПЛА. Для БПЛА, приводимых к радиоконтрастным точкам или объектам, максимальное число возможных наблюдаемых объектов-целей определяется вычислительными возможностями БЭВМ 6.
Переключатели 13, 14 и 15 представляют собой обычные двухпозиционные электронные реле (при использовании цифровой обработки сигналов могут быть выполнены программно). Управляющие входы переключателей 13, 14 и 15 подключены к соответствующим выходам БЭВМ 6. С этих выходов выдаются команды на переключение в режим приведения БПЛА к неконтрастному объекту после оценки результатов радиолокационного обзора местности или указаний в полетном задании.
Нормально-замкнутые контакты переключателя 13 коммутируют сигнал кодовой последовательности изменения фазы зондирующего сигнала с передатчика 2 на первый вход фильтра 10 сжатия сигналов, а нормально-разомкнутые контакты этого ключа коммутируют на его вход последовательность бинарного массива измерений с соответствующего сигнального выхода БЭВМ 6 [5].
Нормально-замкнутые контакты ключа 14 коммутируют выход видеосигнала приемника 3 на второй вход фильтра 10 сжатия сигналов, а нормально-разомкнутые контакты этого ключа коммутируют на второй вход фильтра 10 сжатия сигналов кодовую последовательность эталонного бинарного массива с соответствующего сигнального выхода БЭВМ 6 [5].
Нормально-замкнутые контакты переключателя 15 коммутируют выходной сигнал фильтра 10 сжатия сигналов на вход порогового устройства 11, а нормально-разомкнутые - на вход устройства 16 фиксации максимума.
Блок 17 формирования порога при цифровой обработке сигналов может быть выполнен программно, в другом случае, например, по схеме [5], в которой двухпозиционное реле предназначено для переключения на вход масштабирующего усилителя сигнала среднего значения интенсивности шума аш или (при наличии на управляющем входе сигнала признака режима) на вход усредненного значения интенсивности сигнала ас блока 17. Трехпозиционное поляризованное реле предназначено для переключения резисторов в цепи обратной связи усилителя. Коэффициенты: передачи среднего значения шума аш с сигнального входа ШАРУ блока 17 на его выход, среднего значения сигнала ас с сигнального входа АРУ блока 17 на его выход при отсутствии управляющего сигнала на управляющем входе, передачи блока 17 формирования порога при наличии положительного или отрицательного управляющего сигнала на поляризованном реле определяются отношением суммы величин резисторов в цепи обратной связи усилителя [5]. Величина сигнала на выходе блока 17 формирования порога определяет величину порога Uпор порогового устройства 11.
Устройство 16 фиксации максимума может быть реализовано в аналоговом или цифровом виде с помощью БЭВМ 6. Пример его реализации в аналоговом виде приведен в патенте [5].
В зависимости от типа объекта назначения (радиоконтрастный или нерадиоконтрастный) система управления беспилотным летательным аппаратом работает в одном из двух режимов наведения, которые задаются в виде признака режима и вводятся в полетное задание перед стартом БПЛА с пульта 9 предстартовой подготовки и ввода полетного задания.
Приведение БПЛА к объекту назначения производится при помощи радиолокационного координатора, который в этом режиме работает следующим образом.
Главный луч диаграммы направленности антенны 1 сканирует пространство перед БПЛА по трассе полета. Передатчик 2 с заданной синхронизатором 4 несущей частотой, переключаемой от периода к периоду с помощью сигналов БЭВМ 6, излучает фазоманипулированные зондирующие импульсы, частота следования которых с помощью БЭВМ 6 также изменяется от периода к периоду. Код последовательности изменения фазы несущей частоты u1 через нормально-замкнутые контакты переключателя 13 поступает на вход фильтра 10 сжатия сигналов и запоминается в нем. На второй вход фильтра 10 поступает видеосигнал с первого выхода приемника 3, представляющий собой последовательность сигналов u2, обновляемую путем сдвига через каждый дискрет времени Δτ.Например, при длительности одного дискрета зондирующего импульса Δτ=0,01 мкс частота обновления составляет 100 МГц. При длительности зондирующего сигнала Т=0,4 мкс и Δτ=0,01 мкс число ячеек соответствующих регистров фильтра 10 сжатия сигналов составляет 400. Сигналы этих регистров сравниваются параллельно для каждой пары ячеек, и сумма совпадений определяет величину сигнала из на выходе фильтра 10 сжатия сигналов. Максимальным значение выходного сигнала избудет в момент времени, когда модуляция (манипуляция) принимаемого сигнала совпадает (точнее, будет иметь максимальное соответствие) с зондирующим сигналом. Далее выходной сигнал с фильтра 10 сжатия сигналов через нормально-замкнутые контакты третьего переключателя 15 поступает на сигнальный вход порогового устройства 11, в котором сравнивается уровневым значением Uпор, задаваемым блоком 17 формирования порога. Если величина сигнала из на выходе фильтра сжатия больше порогового значения Uпор, то на выходе порогового устройства 11 появится нормированный сигнал постоянной амплитуды длительностью Δτ. Величина порога Uпор обнаружения сигнала, выше которой сигнал считается обнаруженным, определяется заданным уровнем ложной тревоги, путем оценки аш - среднего уровня интенсивности принимаемого шума. Схема ШАРУ приемника 3 регулирует усиление приемника таким образом, чтобы среднее значение шума было заданной величины, т.е. поддерживает постоянной величину аш. Отношение Uпор/аш определяется заранее на основе анализа закона распределения амплитуды шумовых выбросов и составляет величину порядка (8-10) [5], так как вероятность ложной тревоги в соответствии с критерием Шеймана-Пирсона задается малой величиной 10-5-10-6 [1] и при этом максимизируется вероятность правильного обнаружения. Таким образом, величина уровня срабатывания порогового устройства в режиме обнаружения отраженных сигналов связана с сигналом ШАРУ масштабным коэффициентом. Например, если сигнал ШАРУ, равный среднему значению шума приемника, составляет 0,1 В, то величина порога обнаружения составит 1 В [5].
Устройство 12 фиксации координат (может быть выполнено программно) осуществляет запись величин дистанции и углового положения сигналов от объекта или элементов объекта, превысивших пороговый уровень, и передает эти величины на соответствующие входы БЭВМ 6. В БЭВМ 6 анализируются взаимное положение отраженных сигналов по дистанции и углу или по трем координатам, сравниваются с цифровыми данными точной эталонной трехкоординатной картой местности, заложенной в модуль 20 при предстартовой подготовке, после чего определяются координаты искомого объекта, например, по центру тяжести наблюдаемого двумерного массива [5].
Координаты объекта-цели Хц, Zц в стартовой системе координат определяются соотношениями: Хц=Xt+Dц ⋅ cos(ψц); Z4=Zt+Dц ⋅ sin(ψц). Если известно, что заданный для БПЛА объект неподвижен, то измеренные координаты Хц, Zц сравниваются с координатами полетного задания и при их отличии в БЭВМ 6 заменяются текущие программные координаты X и Z на соответствующие им измеренные значения: Xt=Dц⋅соs(ψц); Zt=D4⋅sin(ψц). Аналогичным образом проводится определение координат объекта-цели при использовании трехкоординатной системы глобальных навигационных спутниковых систем [4]. Сеансы обзора и измерения координат заданного объекта могут повторяться вплоть до малой дистанции, где наступает ослепление радиолокационного координатора.
Если заданный для приведения БПЛА объект подвижен (например, терпящее бедствие дрейфующее судно), то используются для управления летательным аппаратом законы самонаведения, приведенные, например, в [18, 19] или поиск заданного объекта-цели осуществляется методом сканирования района, заданного при предстартовой подготовке, в котором с наибольшей вероятностью он должен находиться. Эта процедура продолжается до момента обнаружения и распознавания объекта-цели, разворота БПЛА и возвращения к местоположению объекта-цели.
В режиме приведения БПЛА в назначенную точку поверхности Земли его полет осуществляется по заложенной во время предстартовой подготовки программе с использованием навигационных данных приемника 18 глобальных навигационных спутниковых систем, а при их отсутствии - по программе автопилота.
Для уменьшения ошибок приведения БПЛА к объекту-цели выделяется участок точной трехкоординатной карты места, где расположен заданный объект-цель, ориентируется относительно направления полета БПЛА и относительно этого направления вырабатывается сигнал ошибки, трансформируемый в БЭВМ 6 в соответствующие управляющие воздействия по входу/выходу 28 на двигатели и рулевые устройства БПЛА, не указанные на фигуре.
Этот участок цифровой карты местности преобразуется в пульте 9 подготовки и управления во время предстартовой подготовки в радиолокационную карту для сравнения с результатами обзора бортовым радиолокатором местности, где выделяются зоны, участки или отдельные объекты с известными геометрическими характеристиками (рельеф, характерные элементы, например, здания, "скачки" по дистанции, вызванные рельефом и затенением более дальних участков ближними объектами) и отражательной способностью, сказывающейся на интенсивности отраженного сигнала, и др. Геометрические характеристики местности в радиолокационном отображении являются наиболее простыми, хорошо изученными и достаточно широко используемыми, особенно в районах с сильно изрезанным рельефом [20, 21].
Закладываемая цифровая карта в районе, где возможно нахождение искомого объекта, для оценки координат объекта-цели разбивается равномерной сеткой на элементы с линейными размерами, равными или меньшими, чем линейная разрешающая способность AD радиолокатора.
Если элемент карты имеет однородную поверхность, ее коэффициент отражения определяется соответствующим значением из таблицы [22, стр. 28] или графиков [22, стр. 72]. При неоднородной поверхности в одном элементе ее отражательная способность Sотр находится как суммарное по площади сегмента S значение [3].
Методика преобразования точной цифровой трехкоординатной карты местности аналогична преобразованию топографической карты в карту интенсивности радиолокационных отражений от поверхности Земли приведена в [23, стр. 5-11, 15].
Реальная интенсивность отражений изменяется в широких пределах (в диапазоне (80-100) дБ), поэтому радиолокационная карта обычно реализуется двумерным массивом ΔXэ⋅ΔZэ восьмиразрядных чисел [3]. В предлагаемой системе радиолокационная карта, составленная по цифровой трехкоординатной карте района, где предполагается нахождение объекта-цели, преобразовывается в бинарный массив b(m,n) той же размерности путем пороговой обработки каждого элемента. Если bi,j>Uпор, то на выходе устройства бинарной обработки bi,j=1, в противном случае bi,j принимаются равными нулю [5].
Естественно, что массив бинарной карты будет существенно изменяться при изменении величины порога Uпор. Пороговое значение интенсивности отражений выбирается таким, чтобы обеспечить после пороговой обработки цифровую карту с отношением чисел нулей и единиц, близким к единице. Как показывают результаты моделирования, такая карта дает наибольший запас достоверности правильной привязки измеренного массива к эталонной радиолокационной и, соответственно, к точной цифровой карте местности. Значение этого порога определяется при помощи итеративной процедуры подсчета числа единиц в бинарном массиве, сравнения его с половиной суммарного числа элементов в эталонной радиолокационной карте и последовательного изменения значения Uпор в сторону увеличения, если число единиц превышает половину массива, и в сторону уменьшения, если число единиц меньше половины массива [5].
По сигналу признака режима на управляющем входе блока 17 формирования порога в нем вместо первой сигнальной цепи (сигнала аш) коммутируется вторая сигнальная цепь по сигналу ас [5]. По величине усредненного уровня интенсивности принимаемых сигналов ас определяется величина Uпор2 уровня срабатывания порогового устройства 11, которая зависит также и от значения величины управляющего сигнала на входе задания масштаба, поступающего с соответствующего выхода БЭВМ 6: Uпор2=ac⋅kn [5].
На дистанции до предлагаемого местоположения заданного объекта-цели в пороговом устройстве 11 устанавливается порог Uпор2, и на очередном цикле обзора формируется бинарный массив измерений отраженных от поверхности сигналов U0 (ψ, D), размерность которого соответствует размерности зондирующего сигнала и числу ячеек регистров фильтра 10 сжатия сигналов. При этом число ячеек фильтра сжатия может в два раза превышать число квантов в зондирующем фазоманипулированном сигнале для компенсации квадратурной составляющей сигнала. В рассматриваемом примере это число 400, т.е. для двадцати значений ψ углового положения антенны с дискретностью Δψ=ΔD/(Dk-D1), где ΔD - разрешающая способность радиолокационного координатора по дистанции, Δψ - угловое перемещение антенны по азимуту за один период следования зондирующих импульсов и измерения четырехсот значений интенсивности сигнала по дистанции с дискретностью AD.
Устройство 12 фиксации координат формирует для БЭВМ 6 массив A (i, j) измерений, присваивая каждому элементу соответствующее значение угла ψ; положения главного луча антенного устройства 1 и дистанции Dj, аналогично тому, как это делается в первом режиме работы по контрастному объекту.
В БЭВМ 6 координаты ψi и Di, измеренные с помощью БЭВМ 6 или массива A (i, j), преобразуются в номера линейных координат по осям X и Z. i-м номерам ψ присваивается i-й номер по оси Z, а j-м номерам D присваивается j-й номер по оси X. В рассматриваемом примере это номера с 1 по 400. При этом указанная операция не требует практичности никаких дополнительных программных или аппаратных затрат в БЭВМ 6. Ограничением является только отношение (Dk-D1)/(40⋅ΔD), которое должно быть более 10, тогда указанные замены координат допустимы [5]. Аналогичным образом производится распределение координат обнаруженных объектов-целей в трехкоординатной системе, только осей в этом случае будет три.
После получения бинарного массива измерений A (i, j) БЭВМ 6 выдает с соответствующего выхода команду на управляющие входы переключателей 13 и 14, изменяя тем самым положение коммутируемых соединений в фильтре 10 сжатия сигналов с выходами БЭВМ 6, подключенных к сигнальным входам переключателей 13 и 14. [5]. Сразу после этого (с задержкой, достаточной для срабатывания переключателей 13, 14) с соответствующего выхода БЭВМ 6 на фильтр 10 сжатия (вместо кода модуляции зондирующего сигнала) поступает через переключатель 13 последовательность бинарного массива измерений A (i, j), а на сдвиговый регистр фильтра 10 сжатия сигналов (вместо видеосигнала с выхода приемника) поступает с соответствующего выхода БЭВМ 6 через переключатель 14 последовательность эталонного массива В (i, j) той же размерности, сформированная из эталонного массива b (m, п) путем последовательного перебора и вырезания матрицы размера массива измерений A (i, j) из матрицы эталонного массива.
Таким образом, в фильтре 10 сжатия сигналов последовательно появляются упорядоченные (аналогично измеренному массиву) бинарные последовательности фрагментов эталонной карты, которые сравниваются с измеренным массивом. Результаты суммирования совпадений значений сигналов с выхода фильтра 10 сжатия сигналов через нормально разомкнутые управляющим сигналом с соответствующего выхода БЭВМ 6 контакты переключателя 15 подаются на устройство 16 фиксации максимума сигнала [5].
Устройство 16 фиксации максимума, которое также может быть выполнено программно с помощью БЭВМ 6, фиксирует величину выходного сигнала 11з фильтра 10 сжатия сигналов на каждом шаге, запоминая его величину, если она превысила запомненную ранее величину этого сигнала, т.е. реализует алгоритм: если текущее значение U3 > U запомненного, то запомненное U=U3, одновременно посылая зафиксированный сигнал U на вход БЭВМ 6, подключенный к устройству 16 фиксации максимума, где запоминается номер такта, на котором это произошло относительно начала прогона эталонного массива, и присваивается ему номер nф. Таким образом, устройство 16 фиксации максимума запоминает одно максимальное значение сигнала на выходе фильтра 10 из всей выборки (M-I)⋅(N-J), а БЭВМ 6 фиксирует номер последнего такта nф, на котором был зафиксирован этот максимум [5].
После окончания "прогонки" эталонного массива через фильтр 10 сжатия в БЭВМ 6 число nф однозначно определяет расположение измеренного массива на эталонной карте.
Вариант проведения коррекции программы автопилота для компенсации уходов гироскопов и неточности привязки места старта БПЛА к заданному объекту приведен в патенте [5].
Для дополнительного пояснения функционирования системы управления БПЛА приведена следующая логико-временная последовательность этапов в режиме приведения к БПЛА к не радиоконтрастному объекту-цели.
1. Вызов точной трехкоординатной карты местности района, где вероятность нахождения объекта-цели максимальна, из памяти пульта 9 и преобразование ее в карту интенсивности радиолокационных отражений.
2. Определение положения и размеров участка ΔХэ, ΔZэ возможного обзора радиолокационным оборудованием, "привязка" места старта БПЛА и начала сканирования района приведения к объекту-цели.
3. Формирование полетного задания: массива эталонной карты b (m, n) с заданной размерностью элементов разрешения, и значения коэффициента kп и алгоритмов процедур, рассмотренных выше.
4. Трансляция из пульта 9 в память БЭВМ 6 через ее первый вход:
- признака режима работы по не радиоконтрастным объектам;
- данных полетного задания, в том числе массива b (m, n);
- коэффициента kп;
- программы автопилота (в простейшем случае направление плоскости стрельбы, высота полета и дальность полета к точке на дистанции D1 до требуемой точки приведения БПЛА, на которой бортовой радиолокационный координатор начинает измерение массив Аi,j интенсивности радиолокационных отражений).
5. Осуществляется включение питания электронных узлов БПЛА и организуется функциональный контроль системы управления и определяется ее готовность. При ее готовности по командам пульта 9 запускается двигатель (не показанный на фигуре) и осуществляется старт БПЛА.
6. Осуществляется полет по проложенному маршруту, заданному с пульта 9 и поддерживаемому БЭВМ 6. В простейшем случае программная траектория полета задается постоянными значениями направления полета в горизонтальной плоскости и высотой полета над поверхностью земли (или высотой полета относительно места старта). Приемник 18 глобальных навигационных спутниковых систем или, при отсутствии возможности его работы, автопилот 7 при помощи БЭВМ 6 определяет истинное значение направления полета и высоту (с присущей им погрешностью), сравнивает их величины с программными значениями и управляет рулевыми органами БПЛА таким образом, чтобы свести это рассогласование к нулю. Таким образом обеспечивается движение БПЛА по заложенной траектории.
7. При достижении текущей дальности величины D2 (крайней точки нахождения района нахождения объекта-цели) включается радиолокационный координатор, путем подачи электропитания на его электронные блоки (система подачи электропитания на координатор на фигуре не указана).
Осуществляется в заданном районе поиск и обнаружение заданного объекта-цели, маска которого заложена в модуль 21, на дистанции Di проводятся измерение отраженного сигнала на видеовыходе приемника 3 в I квантах дистанции и в J угловых положений главного луча диаграммы направленности антенны 1 и присваиваются им значения 0 или 1 (при превышении уровня сигнала величины Uпор2 в пороговом устройстве 11). При помощи устройства 12 происходит фиксация значений j-гo положения главного луча антенны 1 и значений i-й задержки Т3, соответствующей дальности Di элемента отражений аi,j. Значения Di и ψi подаются на соответствующие входы БЭВМ 6 и накапливаются в ее памяти. После одного цикла сканирования в памяти БЭВМ оказывается сформированным бинарный трехмерный массив Аi,j. На дистанции D1 (выполняется условие Dt=DI) на соответствующем выходе БЭВМ 6 появляется сигнал +U признака режима (постоянное напряжение, сигнализирующее о переключении режима обнаружения сигнала на режим формирования массива измерений), по которому при помощи блока 17 формирования порога переключаются порог обнаружения (с величины Uпор на величину Uпор2) в пороговом устройстве 11.
Значение коэффициента кп транслируется с БЭВМ 6 в аналоговом виде на соответствующий управляющий вход блока 17 формирования порога, где в зависимости от его знака уменьшается или увеличивается порог бинарной обработки измеренного массива [3]. На дистанции D1 (выполняется условие Dt=DI) на соответствующем выходе БЭВМ 6 появляется сигнал +U признака режима (постоянное напряжение, сигнализирующее о переключении режима обнаружения сигнала на режим формирования массива измерений), по которому переключаются порог обнаружения (с величины Uпор на величину Uпор2) в пороговом устройстве 11 при помощи блока 17 формирования порога.
Значение коэффициента kп транслируется с БЭВМ 6 в аналоговом виде на соответствующий управляющий вход блока 17 формирования порога, где в зависимости от его знака уменьшается или увеличивается порог бинарной обработки измеренного массива [5]. После окончания формирования массива Ау, что определяется счетом числа зондирующих импульсов радиолокационного координатора, поступающих на вход БЭВМ 6 с пульта 9, на соответствующем выходе БЭВМ 6 появляется команда в виде постоянного потенциала, которая поступает на управляющие входы переключателей 13 и 14. По этой команде переключатель 13 подключает фильтр 10 сжатия, соединенный ранее с кодовым выходом передатчика 2 радиолокационного координатора, к соответствующему выходу БЭВМ 6, а переключатель 14 подключает фильтр 10 сжатия, соединенный ранее с выходом видеосигнала приемника 3 радиолокационного координатора, с соответствующим ему выходом БЭВМ 6. Из массива Ai.j на этом же выходе БЭВМ 6 формируется одномерная последовательность путем последовательного считывания из Аi,j массива i-x столбцов. Эта последовательность (I⋅J) с соответствующего выхода БЭВМ 6 подается через нормально-разомкнутые контакты переключателя 13 на фильтр сжатия 10 и запоминается в нем.
Из эталонного массива b (m, n), находящегося в памяти БЭВМ 6, формируется выборка В (i, j) в виде одномерной последовательности (I⋅J) через соответствующий выход БЭВМ 6 и переключатель 14 поступает на фильтр сжатия 10. Последовательность b (m, п) обновляется (M-I)⋅(N-J) раз. После формирования каждой новой последовательности b (m, n) на соответствующем выходе БЭВМ 6 формируется импульсный сигнал, поступающий на управляющий вход переключателя 15, через который транслируется выходной сигнал фильтра 10 сжатия на устройство 16 фиксации максимума этого сигнала за весь период обработки. Зафиксированный номер Uф сеанса сравнения, при котором сигнал на выходе фильтра сжатия наибольший, определяет необходимые поправки к программным значениям Хц и Zц или соответствующие параметры в трехкоординатной системе съема координат [23].
8. Проводится с использованием БЭВМ 6 распознавание объекта-цели методом корреляции цифрового изображения с соответствующей цифровой маской в модуле 21, определение его координат и времени его обнаружения, разворот и возвращение БПЛА к местоположению объекта-цели;
9. Обеспечивается выполнение завершающей операции, заложенной в полетном задании - при достижении местонахождения заданной точки приведения БПЛА система управления выдает команду, например, сброса груза из модуля 22.
10. Осуществляется возвращение БПЛА, если эта процедура заложена в полетном задании.
Способ наведения БПЛА на объект-цель известен [19]. Объект-цель делается контрастной за счет облучения радиолокатором и отражения электромагнитной энергии. Приемник 3 и узлы обработки радиолокационной информации в блоке 5 совместно с БЭВМ 6 обнаруживают энергию, исходящую от объекта-цели, измеряют координаты, распознают его тип и производят действия таким образом, чтобы сигналы рассогласования между местоположением БПЛА и объектом-целью свести к нулю. Для самонаведения БПЛА на подвижный объект-цель используется автоматическое управление летательным аппаратом с целью приведения его в заданную точку пространства. Для реализации этого в состав БПЛА входят: датчики истинного положения в пространстве (приемник 18 и гироскопические устройства в автопилоте 7), а также формирователи сигналов рассогласования с помощью БЭВМ 6 между сигналами, характеризующими истинное направление БПЛА, и требуемыми для приведения к объекту-цели, предназначенные для изменения положения летательного аппарата путем формирования управляющих воздействий на исполнительные механизмы-рули, меняя направление движения. Упомянутые выше устройства позволяют обнаружить присутствие объекта-цели, распознать его, определить его будущее положение, например, методом экстраполяции [23] и с помощью рулевых устройств по сигналам БЭВМ 6 привести БПЛА к объекту-цели.
Для повышения помехозащищенности, а, следовательно, и точности приведения БПЛА к подвижным объектам-целям на земной поверхности, в системе используется режим псевдослучайной перестройки рабочей частоты (ППРЧ) зондирующего сигнала в синхронизаторе 4 по управляющим сигналам БЭВМ 6, на которую поступают с узлов системы соответствующие квитанции о выполнении команды управления и донесения о работоспособности аппаратуры. При этом на каждой частоте перестройки измеряется качество сигнала. По технологии «когнитивное радио» после мониторинга радиочастотного спектра осуществляется выбор в реальном масштабе времени наилучшего для радиолокации набора частот, обеспечивающего уход от помех.
Таким образом, за счет использования узлов и выполняемых ими процедур реализуется повышение точности приведения БПЛА к подвижным объектам-целям на земной поверхности.
В части реализации системы узлы 2-17 общие с прототипом, узлы 19-21 могут быть выполнены программно, узел 18 - на серийных образцах. Узел 22 может быть выполнен частично программно и при проведении операций с грузом с использованием, например, пластикового контейнера, укрепленного с помощью электронного замка на борту БПЛА. В качестве беспилотного летательного аппарата может быть использован дистанционно пилотируемый летательный аппарат «Грант» фирмы «Новик» (Москва). Вопросы реализации антенного устройства 1 приведены на сайте [7] и различной научно-технической литературе.
Пользуясь приведенным описанием и чертежами, предлагаемую систему можно изготовить, используя известную комплектующую базу и известную технологию, что определяет промышленную применимость предлагаемого изобретения.
Литература:
1. Шаров С.И. Основы проектирования координаторов систем управления движущимися объектами: учеб. пособие / С.И. Шаров. - Л.: Гособразование СССР, 1990. - 96 с.
2. Патент РФ №2083995, опубликовано 10.07.1997 г.
3. Патент РФ №2124221, опубликовано 27.12.1998 г.
4. GPS - глобальная система позиционирования. - М.: ПРИН, 1994. - 76 с.
5. Патент РФ №2189625, опубликовано 20.09.2002 г. Бюл. №26 (прототип).
6. Кейстович А.В. Виды радиодоступа в системах подвижной связи / А.В. Кейстович, В.Р. Милов: учеб. пособие для вузов - М.: Горячая линия - Телеком, 2015.-278 с.
7. Фазированная антенная решетка: устройство и принцип работы, типы ФАР, методы фазировки, области применения // FB.ru [сайт]. - 2023. - URL: http://fb.ru>article/487637/2023-fazirovannaya-antennaya.
8. Яковлев В.В. Стохастические вычислительные машины / В.В. Яковлев, Р.Ф. Федоров - Л.: Машиностроение (Ленинградское отделение), 1974. - 344 с.
9. Патент РФ №2114444, опубликовано 27.06.1998 г.
10. Преснухин Л.Н. Основы конструирования микроэлектронных вычислительных машин (уч. пособие) / Л.Н. Преснухин, В.А. Шахнов, В.А. Кустов. - М.: Высшая школа, 1976. -408 с.
11. Смолов В.Б. Специализированные ЦВМ (учебник) / В.Б. Смолов, В.В. Барашенков, В.Д. Байков и др. - М.: Высшая школа, 1981. - 279 с.
12. Боднер В.А. Системы управления летательными аппаратами: учебник/ В.А Боднер. - М. Машиностроение, 1973. - 504 с.
13. Андреев В.Д. Теория инерциальной навигации. Автономные системы / В.Д. Андреев. - М.: Наука, 1967. - 648 с.
14. Инерциальная навигация. Анализ и проектирование. / под ред. К.Ф. О'Доннела. - М.: Наука, 1969. - 592 с.
15. Липтон А. Выставка инерциальных систем на подвижном основании. / А. Липтон. - М.: Наука, 1971. - 168 с.
16. Репников А.В. Гироскопические системы (уч. пособие) / А.В, Репников, Г.П. Сачков, А.И. Черноморский. - М.: Машиностроение, 1983. - 320 с.
17. Патент РФ №2163392 опубликовано 20.02.2001 г. Бюл. №5.
18. Максимов М.В. Радиолокационные системы самонаведения / М.В. Максимов, Г.И. Горгонов. - М.: Радио и связь, 1992. - 304 с.
19. Лентовский В.В. Системы ориентации и наведения беспилотных летательных аппаратов / В.В. Лентовский и др.; Балт.гос.техн. ун-т.- СПб.: 2019. - 87 с.
20. Белецкий В.К. Корреляционно-экстремальные методы навигации / В.К. Белецкий, А.Н. Юрьев - М.: Радио и связь, 1982. - 256 с. 21. Степанов Ю.Г. Противорадиолокационная маскировка / Ю.Г. Степанов. - М.: Сов. радио, 1968. - 144 с.
22. Шаров С.Н. Некоторые возможности лазерного локатора для ориентации движущегося объекта на местности / С.Н. Шаров // Труды БГТУ, Вопросы повышения качества управления движением. - 1995. - Вып.1.
23. Автоматизация обработки, передачи и отображения радиолокационной информации / под ред. В.Г. Корякова. - М.: Сов. Радио, 1975. - 304 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| КОМПЛЕКС БОРТОВОЙ АППАРАТУРЫ СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2290681C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2759511C1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2564552C1 |
| Радиолокационная станция обнаружения малоразмерных целей | 2020 |
|
RU2744210C1 |
| СПОСОБ УДЕРЖАНИЯ ПОЗИЦИИ БПЛА В ОКРЕСТНОСТИ ЗАДАННОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2024 |
|
RU2837432C1 |
Изобретение относится к системам управления движением беспилотного летательного аппарата (БПЛА) для высокоточного приведения его к заданному объекту. В систему управления беспилотного летательного аппарата введены приемник глобальных навигационных спутниковых систем с антенной, соединенный с синхронизатором, а также с передатчиками, установленными на космических аппаратах, модуль хранения координат района нахождения заданных объектов-целей и расстановки их по приоритетам, модуль трехкоординатной электронной карты местности, где вероятность нахождения объекта-цели максимальна, модуль хранения масок, характерных для радиолокационных отображений объектов-целей, полученных с разных ракурсов в заданном частотном диапазоне, модуль подготовки и выполнения завершающей операции и их взаимные связи. В качестве антенного устройства использована фазированная антенная решетка. Технический результат – повышение точности приведения БПЛА к подвижным объектам-целям на земной поверхности. 1 ил.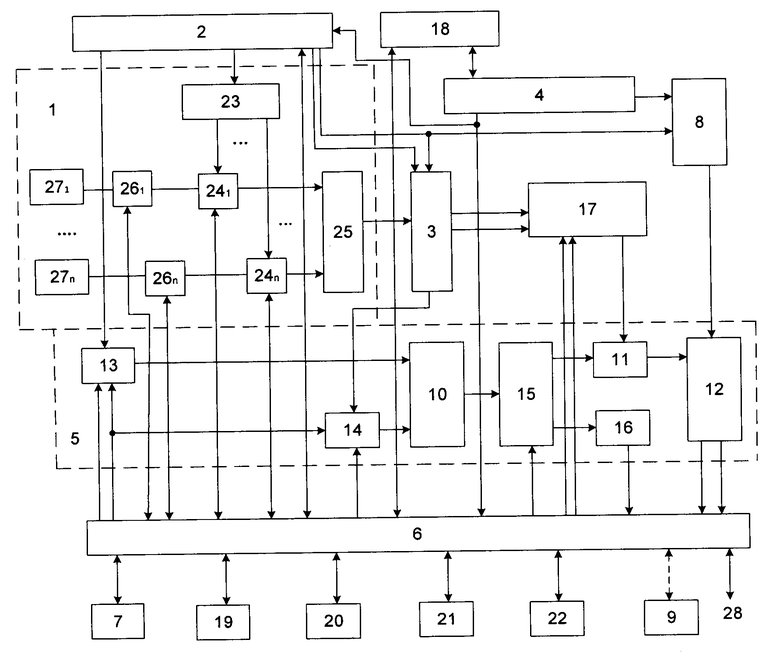
Система управления беспилотного летательного аппарата, содержащая пульт предстартовой подготовки и ввода полетного задания, автопилот, подключенный двухсторонней связью к бортовой электронно-вычислительной машине (БЭВМ), радиолокационный координатор с фазоманипулированным зондирующим сигналом, который содержит антенну, соединенную сигнальными входом и выходом с передатчиком и приемником соответственно, синхронизатор, дальномер и устройство обработки сигналов, в состав которого входят три переключателя, устройство фиксации максимума, фильтр сжатия сигналов, пороговое устройство, блок формирования порога и устройство фиксации координат, входы которого подключены к выходу порогового устройства и выходу дальномера, а выходы, на которых формируются значения величин дистанции и углового положения отраженных сигналов, подключены к соответствующим входам БЭВМ, соответствующий вход которой и вход передатчика подключены к сигнальному выходу синхронизатора, передающему импульсную последовательность с частотой зондирования, второй выход синхронизатора, передающий последовательность импульсов синхронизации, подключен ко второму входу дальномера, первый вход которого и вход приемника по сигналу окончания зондирующего импульса подключены ко второму выходу передатчика, гетеродинный выход которого соединен с гетеродинным входом приемника, управляющие входы блока формирования порога по сигналу признака режима и сигналу задания масштаба подключены к соответствующим выходам БЭВМ, выход блока формирования порога подключен к уровневому входу порогового устройства, а его соответствующие сигнальные входы - к выходам приемника, на которых формируются усредненное значение интенсивности шума и усредненное значение интенсивности отраженных сигналов, кодовый выход передатчика и выход видеосигнала приемника подключены к первым сигнальным входам соответственно первого и второго переключателей, управляющие входы которых соединены с соответствующим выходом БЭВМ, а сигнальные входы первого и второго переключателей подключены к соответствующим сигнальным выходам БЭВМ, с которых передаются последовательность бинарного массива измерений и последовательность эталонного бинарного массива, первый и второй входы фильтра сжатия сигналов подключены к выходам соответственно первого и второго переключателей, а его выход соединен с сигнальным входом третьего переключателя, управляющий вход которого подключен к соответствующему выходу БЭВМ, а первый и второй выходы - к сигнальному входу порогового устройства и сигнальному входу устройства фиксации максимума, выход устройства фиксации максимума, передающий сигнал, характеризующий местоположение бинарного массива измерений на эталонной карте, соединен с соответствующим входом БЭВМ, отличающаяся тем, что в нее введены соединенные двухсторонними связями с БЭВМ модуль трехкоординатной электронной карты местности, где вероятность нахождения объекта-цели максимальна, модуль хранения масок, характерных для радиолокационных отображений объектов-целей, полученных с разных ракурсов в заданном частотном диапазоне, модуль хранения координат района нахождения заданных объектов-целей с расстановкой их по приоритетам, модуль подготовки и выполнения завершающей операции, приемник глобальных навигационных спутниковых систем с антенной, соединенный двухсторонними связями с синхронизатором, БЭВМ, а также с более чем тремя передатчиками, установленными на космических аппаратах, также БЭВМ соединена двухсторонними связями с передатчиком, пультом предстартовой подготовки и ввода полетного задания при выполнении процедур подготовки полета БПЛА и сбора донесений о работоспособности его узлов, соответствующий вход/выход БЭВМ предназначен для выдачи команд управления на двигательные установки и рули БПЛА, приема от них донесений о выполнении заданной команды, при этом антенна выполнена в виде фазированной антенной решетки, состоящей из n антенных излучателей, подключенных к параллельным цепочкам последовательно соединенных управляемых БЭВМ фазовращателей и переключателей «Прием-Передача», причем выход каждого переключателя в режиме «Прием» подключается через высокочастотное суммирующее устройство к приемнику, а вход каждого переключателя «Прием-Передача» в режиме «Передача» подключается через делитель мощности к передатчику.
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| СИСТЕМА ПРИЦЕЛИВАНИЯ ОРУЖИЯ | 2021 |
|
RU2784528C1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| US 11353290 B2, 07.06.2022 | |||
| US 10072908 B2, 11.09.2018. | |||

