Область техники
Изобретение относится к системам наблюдения и противодействия беспилотным летательным аппаратам и может быть использовано для обнаружения, сопровождения, распознавания и нейтрализации беспилотных летательных аппаратов (БПЛА), включая мини- и микроБПЛА.
Уровень техники
Известны системы наблюдения и противодействия беспилотным летательным аппаратам /RU 2578524, RU 2695015, RU 2701421/.
Наиболее близкой по назначению и технической сущности к заявляемому изобретению относится система /RU 2701421, 26.09.2019/ наблюдения и противодействия БПЛА, содержащая наземный центр контроля (НЦК) воздушного пространства, соединенный по входу со средствами обнаружения (СО) БПЛА, а по выходу – со средствами нейтрализации (СН) БПЛА. СО БПЛА включают не менее одной радиолокационной станции (РЛС), а СН – не менее одного беспилотного летательного аппарата перехватчика (БПЛАП), снабженного радиомодемом связи и средствами захвата и доставки на землю обнаруженного БПЛА.
При этом бортовые СО кроме РЛС могут включать, видеокамеры, тепловизоры, а наземные СО – дополнительно сонары.
Недостатком известной системы /RU 2701421/ является ограниченные возможности по обнаружению и противодействию БПЛА.
Это связано с тем, что ввиду малых размеров и радиопрозрачности современных БПЛА их обнаружение существующими РЛС (слепыми в отношении мини- и микроБПЛА в пластиковом корпусе) в /RU 2701421/ признается практически невозможным. Для этого в /RU 2701421/ предлагается дополнительно использовать сонары (звуковые обнаружители), видеокамеры и тепловизоры.
Однако указанные дополнительные средства в чистом виде не позволяют обеспечить измерение координат и сопровождение обнаруженных БПЛА и, как следствие, не позволяют выдать точное целеуказание средствам противодействия (СП) БПЛА.
В свою очередь, ресурс СП БПЛА известной системы /RU 2701421/ ограничен применением БПЛА-перехватчика (БЛАП) со сбрасываемой сетью для захвата БПЛА.
При массовом налете мини и микро БПЛА противодействие им требует применения соответствующего количества громоздких БЛАП, оснащенных «слепыми» бортовыми РЛС, видеокамерой, тепловизором и сетью захвата БПЛА.
В целом указанные недостатки известной системы /RU 2701421/ ограничивают её возможности по обнаружению и противодействию БПЛА.
Задачей изобретения является расширение функциональных возможностей системы по обнаружению и противодействию БПЛА.
Техническим результатом, возникающим за счет решения этой задачи, является повышение надежности отражения массового налета мини и микро БПЛА.
Сущность изобретения
Решение поставленной задачи и достижение заявленного технического результата обеспечивается тем, что система наблюдения и противодействия (СНП) беспилотным летательным аппаратам (БПЛА) содержит наземный центр контроля (НЦК) воздушного пространства, соединенный по входу со средствами обнаружения (СО) БПЛА, а по выходу – со средствами нейтрализации (СН) БПЛА. Причем СО БПЛА включают не менее одной радиолокационной станции (РЛС), а СН – не менее одного беспилотного летательного аппарата перехватчика (БПЛАП), снабженного радиомодемом связи и средствами захвата и доставки на землю обнаруженного БПЛА.
Новым в СНП является:
- Выполнение НЦК с возможностью управления разнородными средствами СО и СН по обнаружению и нейтрализации гиперскоростных, планирующих и малоскоростных мини- и микроБПЛА.
- Выполнение РЛС с возможностью обнаружения мини и микро БПЛА в пластмассовом корпусе.
- Дополнительное снабжение СО не менее одной оптико-электронной системой (ОЭС) обнаружения с возможностью автосопровождения и идентификации типа БПЛА.
- Дополнительное снабжение СО не менее одной системой радиотехнической разведки (РТР) каналов управления и передачи данных БПЛА.
- Дополнительное снабжение СН не менее одним глушителем каналов связи и навигации БПЛА.
- Дополнительное снабжение СН не менее одной пусковой установкой ракет для перехвата теплоизлучающих БПЛА.
- Дополнительное снабжение СН не менее одним зенитным орудием для борьбы с гиперскоростными планирующими БПЛА.
- Дополнительное снабжение СН не менее одной лазерной установкой для плавления пластмассовых корпусов БПЛА.
- Дополнительное снабжение СН не менее одним радиолучевым устройством 3.6 для дистанционного электропробоя электронной аппаратуры БПЛА.
- Установка составляющих элементов СН на раздельных силовых следящих приводах и соединение их по сигнальным и управляющим входам/выходам с управляющей ЭВМ НЦК через модемные каналы связи.
Доказательство достижения заявленного технического результата и решение поставленной задачи
Выполнение НЦП с возможностью управления НЦК разнородными средствами СО и СН по обнаружению и нейтрализации разнородных БПЛА, а также дополнительное оснащение и рациональный выбор средств системы обнаружения и противодействия (СНП) позволяют расширить функциональные возможности СНП и достичь заявленного технического результата - повышение надежности отражения массового налета гиперскоростных, планирующих и малоскоростных мини и микро БПЛА.
Сущность изобретения поясняется чертежами, представленными на фиг. 1- 10.
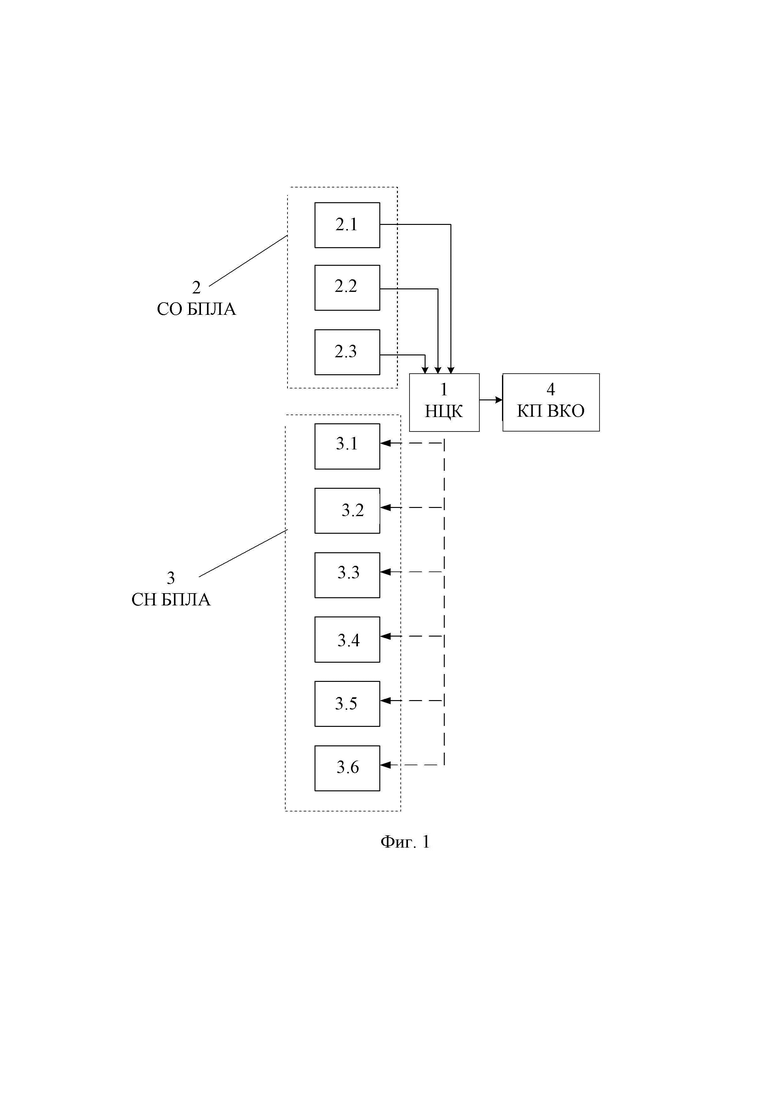
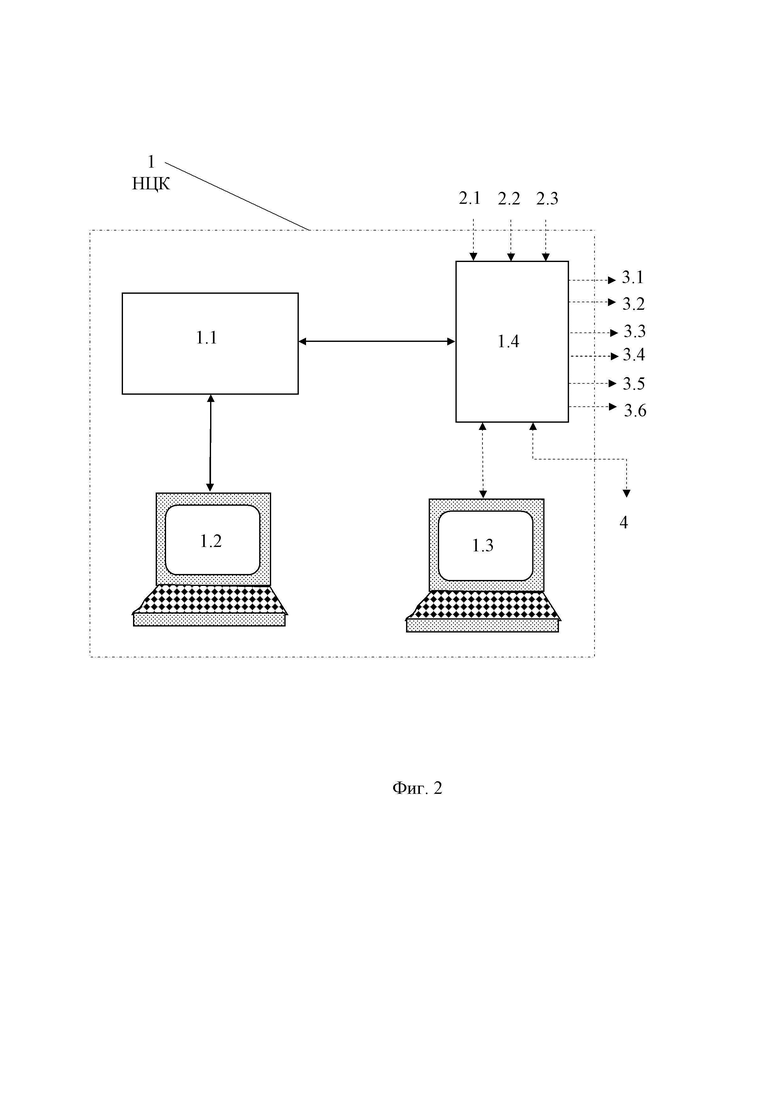
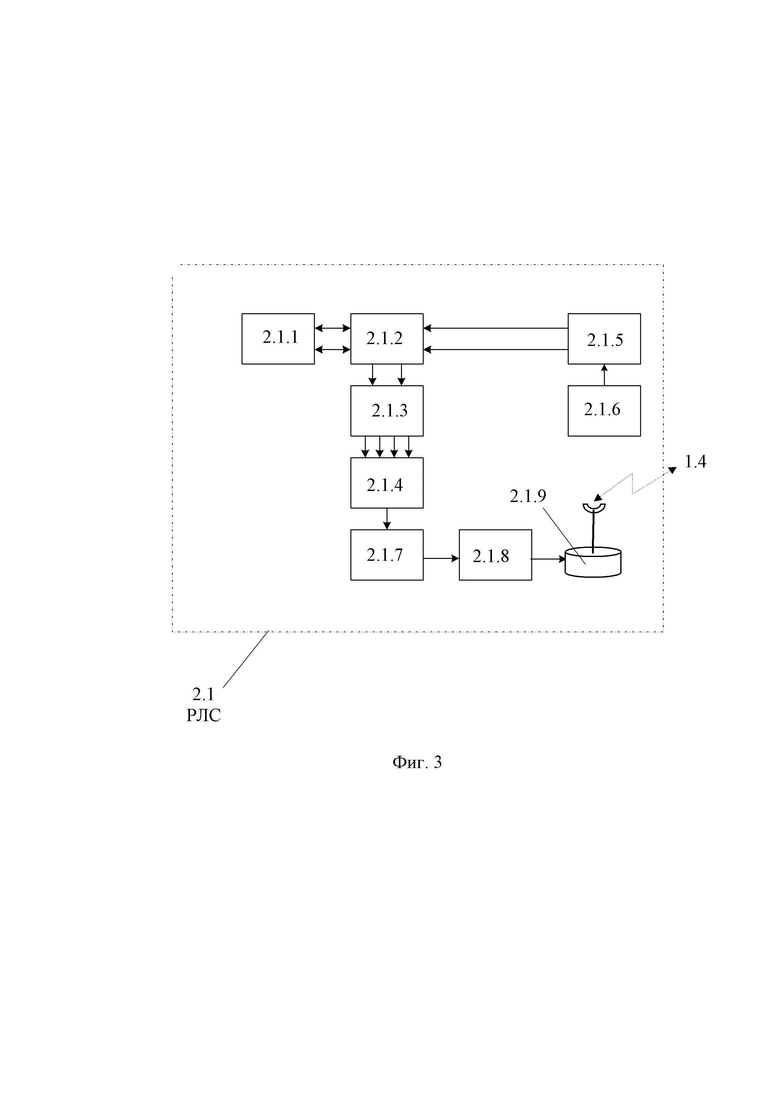
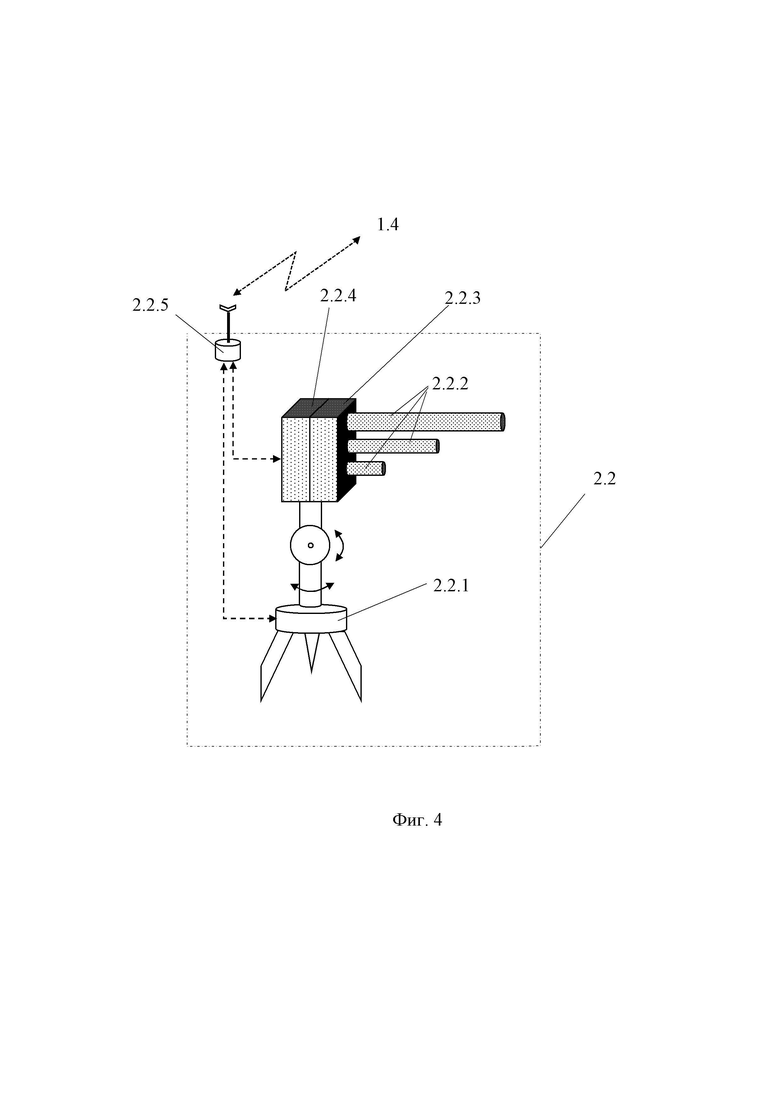
На фиг. 1 представлена функциональная схема системы обнаружения и противодействия (СНП) БПЛА, на фиг. 2 - функциональная схема наземного центра контроля (НЦК) воздушного пространства, на фиг. 3 - функциональная схема РЛС обнаружения БПЛА с возможностью обнаружения мини и микро БПЛА с радиопрозрачным диэлектрическим корпусом, на фиг. 4 - функциональная схема оптико-электронной системы (ОЭС) обнаружения с возможностью автосопровождения и идентификации типа БПЛА, на фиг. 5 - функциональная схема системы радиотехнической разведки (РТР) каналов управления и передачи данных БПЛА, на фиг. 6 - глушитель каналов связи и навигации БПЛА, на фиг. 7 - функциональная схема пусковой установки ракет для перехвата теплоизлучающих БПЛА, на фиг. 8 - функциональная схема зенитного орудия для борьбы с гиперскоростными и планирующими БПЛА, на фиг. 9 - функциональная схема лазерная установка для плавления пластмассовых корпусов БПЛА, на фиг. 10 - функциональная схема радиолучевого устройства для дистанционного электропробоя электронной аппаратуры БПЛА.
На фиг. 1-10 позициями обозначены:
1 - наземный центр контроля (НЦК) воздушного пространства;
1.1 - управляющая электронная вычислительная машина (ЭВМ);
1.2 - автоматизированное рабочее место (АРМ) оператора НЦК 1;
1.3 - выносной пульт управления;
1.4 аппаратура цифровой связи;
2 - средства обнаружения (СО) беспилотных летательных аппаратов (БПЛА);
2.1 - радиолокационная станция (РЛС) с возможностью обнаружения БПЛА с радиопрозрачным корпусом, включая мини и микро БПЛА;
2.1.1 - зеркальная приемопередающая антенна кругового обзора с cosec2 лучом в угломестной плоскости и узким лучом в азимутальной плоскости;
2.1.2 - антенный переключатель;
2.1.3 - четырехканальный приемник сигналов горизонтальной и вертикальной поляризации;
2.1.4 - устройство цифровой обработки сигналов;
2.1.5 - передатчик;
2.1.6 - формирователь последовательности зондирующих сигналов (ЗС) наносекундной и микросекундной длительности;
2.1.7 - цифровой коррелятор;
2.1.8 - автоматизированное рабочее место (АРМ) оператора РЛС 2.1;
2.1.9 - радиомодем связи с НЦК 1;
2.2 - оптико-электронная системы (ОЭС) обнаружения и сопровождения БПЛА;
2.2.1 - силовой следящий привод (ССП) ОЭС 2.2;
2.2.2 - блок оптических объективов;
2.2.3 - блок матричных фотоприемников;
2.2.4 - аналого-цифровой преобразователь (АЦП);
2.2.5 - модем радиосвязи ОЭС 2.2 с НЦК 1;
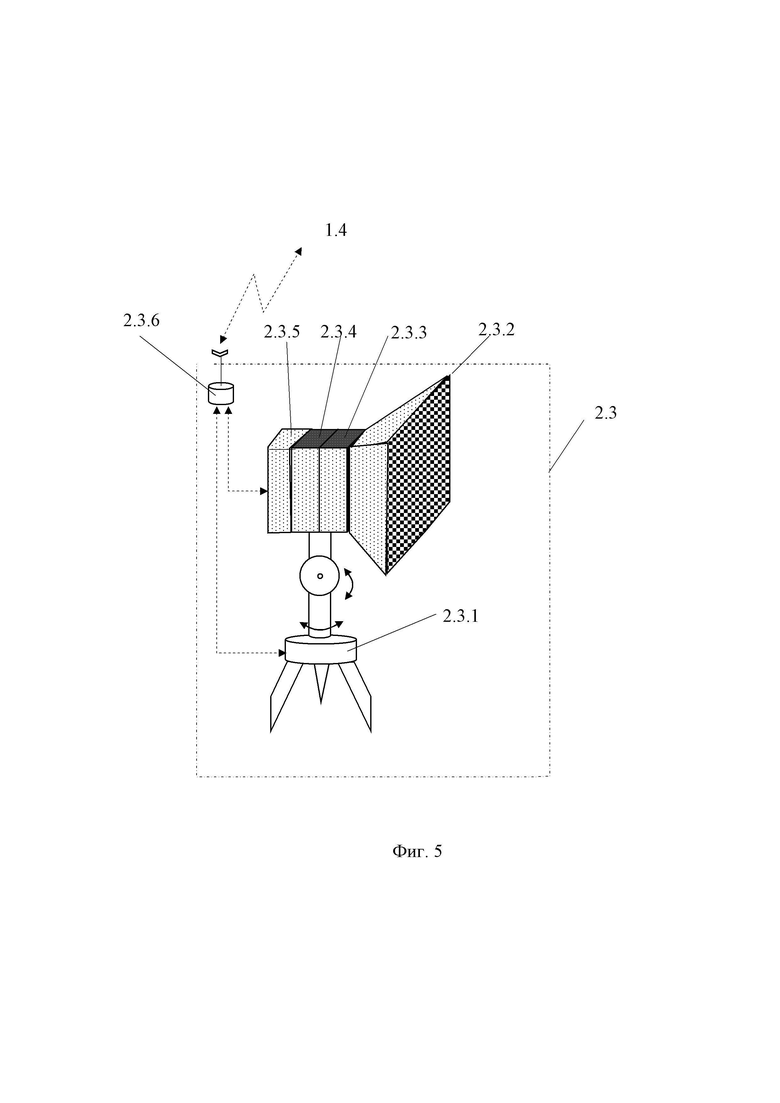
2.3 - система радиотехнической разведки (РТР) каналов управления и передачи данных БПЛА;
2.3.1 - силовой следящий привод (ССП) системы 2.3 РТР;
2.3.2 - широкополосная антенна;
2.3.3 - широкополосный радиоприемник с цифровым выходом;
2.3.4 - цифровой спектроанализатор;
2.3.5 - измеритель параметров средств связи и навигации бортовой аппаратуры БПЛА;
2.3.6 – радиомодем связи системы 2.3 РТР с НЦК 1;
3 - средства нейтрализации (СН) БПЛА;
3.1 - беспилотный летательный аппарат БПЛА-перехватчик (БПЛАП);
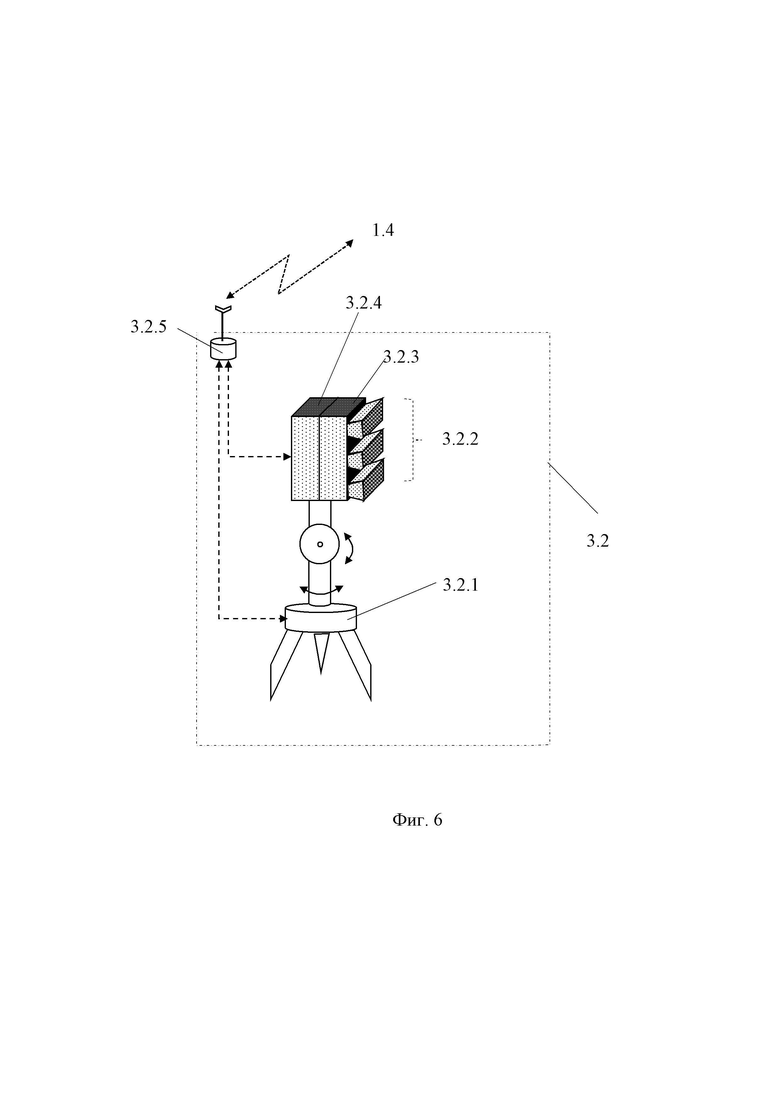
3.2 - глушитель каналов связи и навигации БПЛА;
3.2.1 - силовой следящий привод (ССП) глушителя 3.2;
3.2.2 - блок антенных излучателей для глушения высотомера, навигатора и каналов управления БПЛА;
3.2.3 - блок усилителей помех;
3.2.4 - блок генераторов помех;
3.2.5 - модем радиосвязи глушителя 3.2 с НЦК 1;
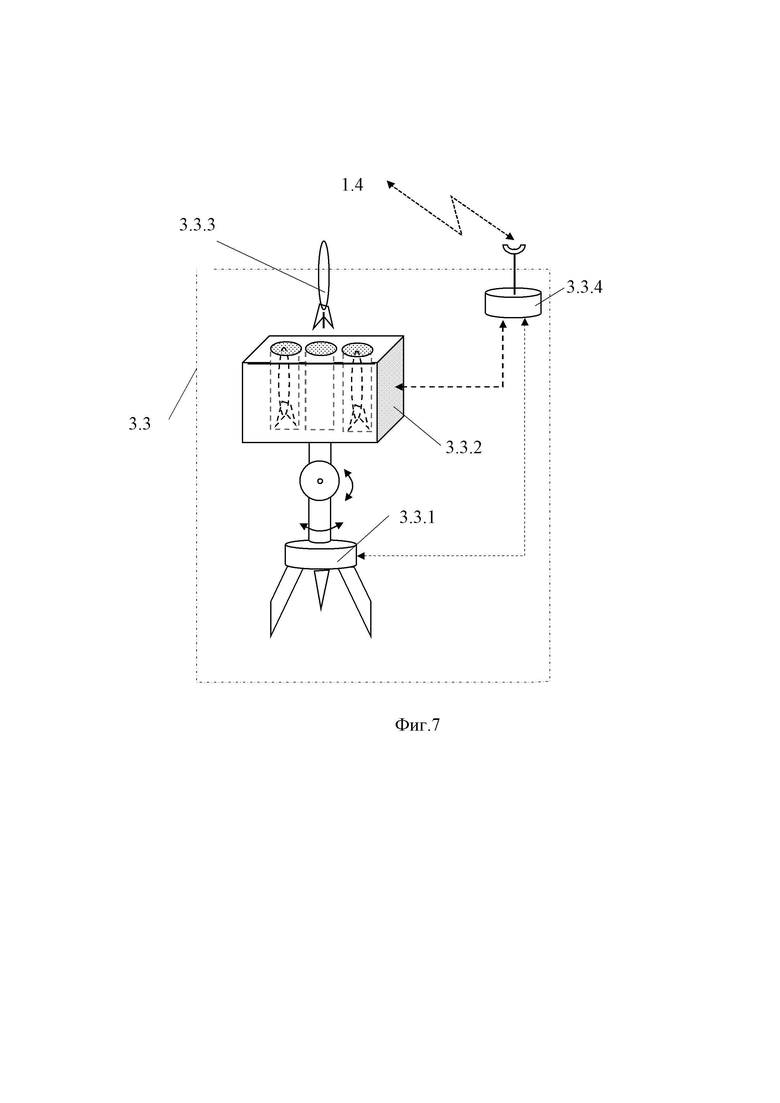
3.3 - пусковая установка (ПУ) ракет с инфракрасной (ИК) головкой самонаведения для перехвата теплоизлучающих БПЛА;
3.3.1 - силовой следящий привод (ССП) пусковой установки 3.3;
3.3.2 – стартовый блок;
3.3.3 – ракета с тепловой головкой самонаведения (ГСН);
3.3.4 - радиомодем связи ПУ 3.3 с НЦК 1;
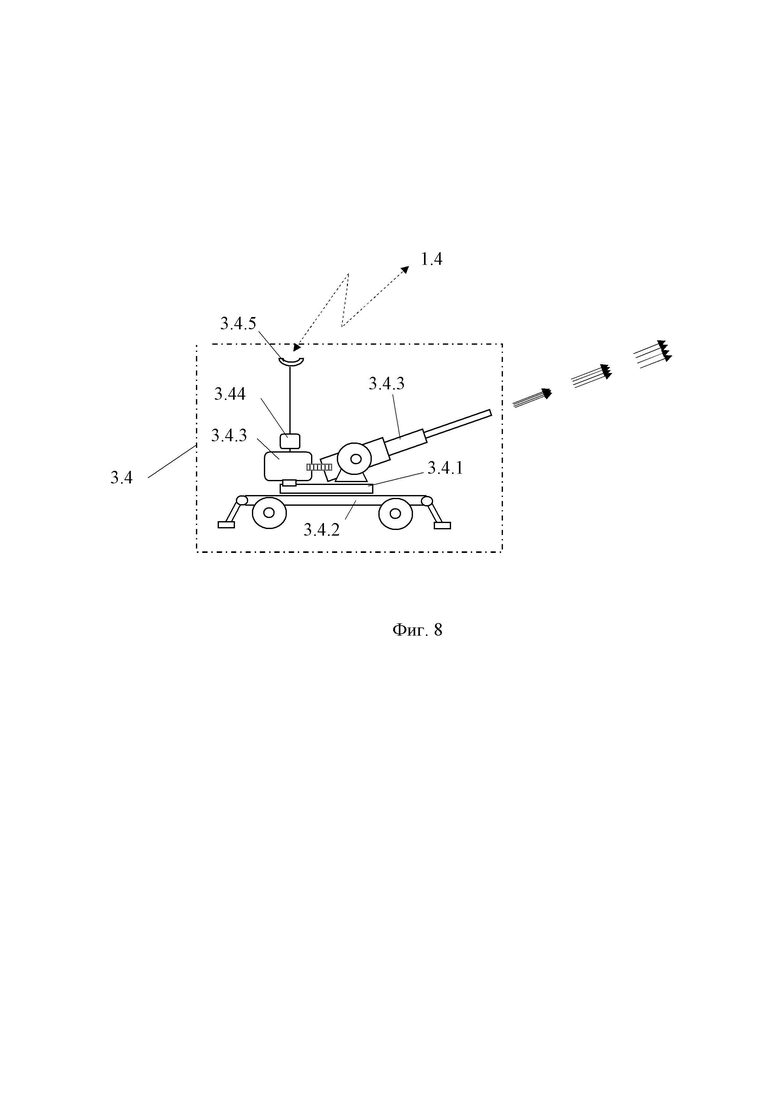
3.4 - зенитное орудие (ЗО) для борьбы с гиперскоростными и планирующими БПЛА;
3.4.1 – опорно-поворотное устройство (ОПУ) ЗО;
3.4.2 - мобильная платформа;
3.4.3 - питающее устройство выстрелов пучками игл или шрапнели;
3.4.4 - радиомодем связи ЗО с НЦК 1;
3.4.5 - антенна связи радиомодема 3.4.4;
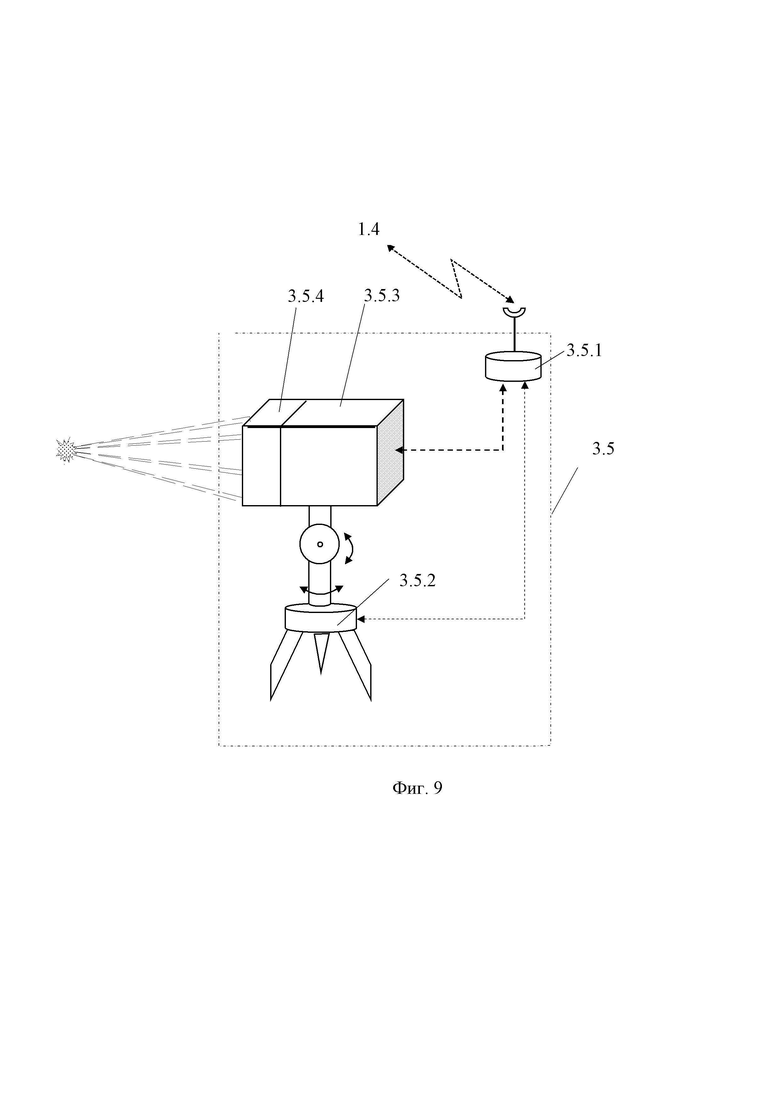
3.5 - лазерная установка (ЛУ) для плавления пластмассовых корпусов БПЛА;
3.5.1 - радиомодем связи ЛУ 3.5 с НЦК 1;
3.5.2 - опорно-поворотное устройство (ОПУ) ЛУ 3.5;
3.5.3 - многолучевой волоконный лазер;
3.5.4 - оптическая система сведения лучей лазера 3.5.3;
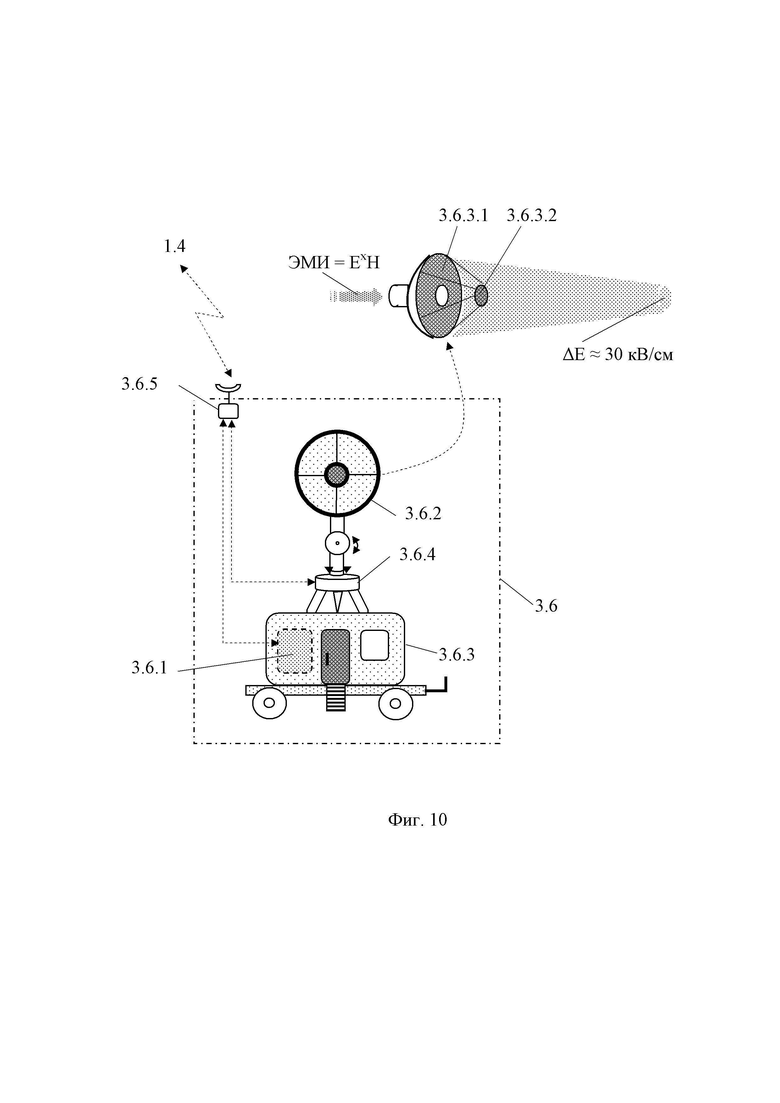
3.6 - радиолучевое устройство (РУ) для дистанционного электропробоя электронной аппаратуры БПЛА;
3.6.1 - генератор мощных электромагнитных импульсов (ЭМИ) сантиметрового диапазона электромагнитных волн (ЭМВ) для дистанционного электропробоя электронной аппаратуры БПЛА;
3.6.2 – антенный излучатель ЭМИ (линза Касегрена);
3.6.3.1 – рефлектор;
3.6.2.2 – контррефлектор;
3.6.3 - электроизолированная мобильная кабина;
3.6.4 - опорно-поворотное устройство (ОПУ) излучателя 3.6.2;
4 - командный пункт (КП) управления воздушно-космической обороной (ВКО).
Раскрытие сущности изобретения
Система наблюдения и противодействия (СНП) беспилотным летательным аппаратам (БПЛА) содержит наземный центр контроля (НЦК) 1 воздушного пространства, соединенный по входу со средствами обнаружения (СО) 2 БПЛА, а по выходу – со средствами нейтрализации (СН) 3 БПЛА.
Наземный центр контроля (НЦК) 1 выполнен с возможностью оперативного управления разнородными средствами СО и СН. Для этого он содержит соединенные интерфейсными линиями модемной связи управляющую электронную вычислительную машину (ЭВМ) 1.1, автоматизированное рабочее место (АРМ) 1.2, выносной пульт 1.3 управления системой и аппаратуру 1.4 цифровой связи с выносным пультом 1.3, с СО 2, с СН 3 и с командным пунктом (КП) 4 управления воздушно-космической обороной (ВКО).
Средства 2 обнаружения (СО) БПЛА включают не менее одной радиолокационной станции (РЛС) 2.1, не менее одной оптико-электронной системы (ОЭС) 2.2 обнаружения и сопровождения БПЛА, не менее одной системы 2.3 радиотехнической разведки (РТР) каналов управления и передачи данных БПЛА.
РЛС 2.1 обнаружения БПЛА выполнена с возможностью обнаружения мини и микро БПЛА с пластмассовым корпусом. Она содержит зеркальную приемопередающую антенну 2.1.1 кругового обзора с cosec2 лучом в угломестной плоскости и узким лучом в азимутальной плоскости. Антенна 2.1.1 соединена по сигналам зондирования через антенный переключатель 2.1.2 и передатчик 2.1.5 с формирователем 2.1.6 последовательности зондирующих сигналов (ЗС) наносекундной и микросекундной длительности. По ответным сигналам она соединена через антенный переключатель 2.1.2, четырехканальный приемник 2.1.3 сигналов горизонтальной и вертикальной поляризации, устройство 2.1.4 цифровой обработки сигналов, цифровой коррелятор 2.1.7, автоматизированное рабочее место (АРМ) 2.1.8 РЛС 2.1 и радиомодем 2.1.9 связи с аппаратурой 1.4 цифровой связи НЦК 1. Причем ЗС наносекундной и микросекундной длительности формирователя 2.1.6 выполнены соответственно немодулированными и с внутриимпульсной модуляцией с паузой между ними доли мкс и разнесением их по частоте на 1-50 МГц.
Оптико-электронная система (ОЭС) 2.2 обнаружения БПЛА выполнена с возможностью автосопровождения и идентификации типа БПЛА. Для этого она содержит установленные на силовом следящем приводе (ССП) 2.2.1 и последовательно соединенные по фототелевизионным сигналам блок объективов 2.2.2, блок 2.2.3 матричных фотоприемников видимого и инфракрасного диапазона электромагнитных волн (ЭМВ), аналого-цифровой преобразователь (АЦП) 2.2.4, и модем 2.2.5 радиосвязи с аппаратурой 1.4 цифровой связи НЦК 1. При этом блок 2.2.2 объективов содержит телескопические объективы с фокусным расстоянием от 130 до 1450 мм для обеспечения автосопровождения и идентификации типа БПЛА в ближней, средней и дальней зоне их обнаружения соответственно.
Система 2.3 радиотехнической разведки (РТР) каналов управления и передачи данных БПЛА содержит модем 2.3.6 радиосвязи с аппаратурой 1.4 цифровой связи НЦК 1, а также установленные на силовом следящем приводе (ССП) 2.3.1 и последовательно соединенные широкополосную антенну 2.3.2, широкополосный радиоприемник 2.3.3.с цифровым выходом, цифровой спектроанализатор 2.3.4, измеритель 2.3.5 параметров средств связи и навигации бортовой аппаратуры БПЛА, соединенный с сигнальным входом радиомодема 2.3.6 связи, управляющий выход которого соединен с входом ССП 2.3.1.
Средства обнаружения (СО) 2.1-2.3 по сигнальным выходам и командам управления обнаружением и сопровождением БПЛА соединены через соответствующие модемы связи и аппаратуру 1.4 цифровой связи с управляющей ЭВМ 1.1 НЦК 1.
Выходы ЭВМ 1.1 НЦК 1 по командам управления противодействием БПЛА соединены с управляющими входами средств нейтрализации (СН) 3 БПЛА.
Средства нейтрализации (СН) 3 содержат не менее одного беспилотного летательного аппарата БПЛА-перехватчика (БПЛАП) 3.1, не менее одного глушителя 3.2 каналов связи и навигации БПЛА, не менее одной пусковой установки 3.3 ракет для перехвата теплоизлучающих БПЛА, не менее одного зенитного орудия 3.4 для борьбы с гиперскоростными планирующими БПЛА, не менее одной лазерной установки 3.5 для плавления пластмассовых корпусов БПЛА, не менее одного радиолучевого устройства 3.6 для дистанционного электропробоя электронной аппаратуры БПЛА.
БПЛАП 3.1, содержит радиомодемом связи с НЦК 1, обнаружитель источника сигналов управления БПЛА, не менее одной миниракеты с головкой самонаведения для уничтожения источника управления и/или не менее одного глушителя каналов связи БПЛА, а также содержит выкидную сеть захвата БПЛА и доставки его на землю (на фигурах не показано).
Глушитель 3.2 каналов связи и навигации БПЛА содержит установленные на силовом следящем приводе (ССП) 3.2.1 и последовательно соединенные модем 3.2.5 радиосвязи с аппаратурой 1.4 цифровой связи НЦК 1, блок 3.2.4 генераторов помех, блок 3.2.3 усилителей помех и блок 3.2.2 антенных излучателей для глушения высотомера, навигатора и каналов управления БПЛА.
Пусковая установка (ПУ) 3.3 ракет для перехвата теплоизлучающих БПЛА содержит силовой следящий привод (ССП) 3.3.1, на котором установлен стартовый блок (СБ) 3.3.2 ракет 3.3.3 с тепловыми головками самонаведения (ГСН). Причем ССП 3.3.1 и СБ 3.3.2 соединены через радиомодем связи 3.3.4 с НЦК 1.
Зенитное орудие 3.4 для борьбы с гиперскоростными и планирующими БПЛА содержит установленные на ОПУ 3.4.1 мобильной платформы 3.4.2 малокалиберную зенитную пушку 3.4.3 заградительного огня, питающее устройство 3.4.3 выстрелов пучками игл или шрапнели, радиомодем 3.4.4 и антенну 3.4.5 связи с аппаратурой 1.4 цифровой связи НЦК 1. При этом зенитная пушка 3.4.3 заградительного огня выполнена турельного типа, калибром не более 35 мм и со скорострельностью не менее 1000 выстрелов в минуту.
Лазерная установка 3.5 для плавления пластмассовых корпусов БПЛА содержит радиомодем связи 3.5.1 с аппаратурой 1.4 цифровой связи НЦК 1, а также установленные на ОПУ 3.5.2 многолучевой волоконный лазер 3.5.3 с оптической системой 3.5.4 сведения лучей.
Радиолучевое устройство 3.6 для дистанционного электропробоя электронной аппаратуры БПЛА содержит генератор 3.6.1 мощных электромагнитных импульсов (ЭМИ) сантиметрового диапазона электромагнитных волн, соединенный через волноводную систему, заполненную нейтральным газом, с входом излучателя 3.6.2 ЭМИ. Генератор 3.6.1 ЭМИ установлен в электроизолированной мобильной кабине 3.6.3, а излучатель 3.6.2 ЭМИ – на ОПУ 3.6.4, установленном на крыше кабины 3.6.3. При этом генератор 3.6.1 ЭМИ и ОПУ 3.6.4 по управляющим входам соединены через радиомодем 3.6.5 связи, аппаратуру 1.4 цифровой связи с управляющей ЭВМ 1.1 НЦК 1. Генератор 3.6.1 ЭМИ выполнен в виде магнетрона или клистрона, а излучатель 3.6.2 ЭМИ - в виде линзы Касегрена, включающей рефлектор 3.6.3.1 и контррефлектор 3.6.3.2, или в виде рефлектора 3.6.3.1, по внешней вогнутой поверхности которого равномерно распределены твердотельные усилители ЭМИ (на фигурах не показано).
Указанные средства нейтрализации 3.1-3.6 СН 3 по сигналам управления и отработки команд нейтрализации БПЛА соединены через соответствующие модемы связи и аппаратуру 1.4 цифровой связи с управляющей ЭВМ 1.1 НЦК 1.
Система наблюдения и противодействия (СНП) может содержать в своем составе от 1 до 10 каждого вида средств наблюдения и противодействия БПЛА.
Работа СНП
Система наблюдения и противодействия (СНП) БПЛА работает следующим образом.
При описании работы СНП предполагается, что запуск БПЛА на объект обороны типа зенитно-ракетной системы (ЗРС) «С-400» осуществляется с летательных аппаратов, не входящих в зону поражения ЗРС, или в зоне поражения - с помощью мобильных наземных пусковых установок и пеших диверсантов, выдвинутых в сторону ЗРС и невидимых (из-за ограничений по высоте зоны обнаружения) информационных средств ЗРС «С-400».
В результате возможен одновременный запуск «роя» БПЛА, приводящий к перегрузке информационных средств, быстрому истощению боекомплекта ЗРС и беспрепятственному входу в зону ответственности ЗРС «С-400» основных сил и средств воздушно-космического нападения (СВКН).
В этих условиях РЛС 2.1, ОЭС 2.2 и система РТР 2.3 СНП в режиме кругового обзора под управлением ЭВМ 1.1 НЦК 1 ведут одновременное наблюдение воздушного пространства в средней и ближней зоне от ЗРС «С-400».
При этом использование в РЛС 2.1 последовательности зондирующих сигналов (ЗС) наносекундной и микросекундной длительности и поляризационная обработка принятых сигналов позволяют обнаруживать БПЛА как в металлическом, так в диэлектрическом (радиопрозрачном) корпусе, включая мини и микро БПЛА.
В свою очередь применение в ОЭС 2.2 трех разнофокусных объективов и применение блока матричных фотоприемников видимого и инфракрасного (ИК) диапазона ЭМВ позволяют менять поле зрения ОЭС 2.2, идентифицировать тип БПЛА по его изображению и излучаемому теплу, а также пассивно (без излучения в эфир) определять дальность до него по относительному количеству засвеченных пикселей на фотоприемной матрице.
Использование в системе РТР 2.3 широкополосных средств угловой пеленгации и распознавания БПЛА по излучению его аппаратуры связи и навигации позволяет измерить частоту и амплитудно-временные характеристики сигналов управления БПЛА, а также пеленг (угловое направление) на излучающий БПЛА и на источник сигналов управления его полетом.
Результаты измерений РЛС 2.1, ОЭС 2.2 и РТР 2.3 в режиме реального времени через соответствующие радиомодемы 2.1.9, 2.2.5, 2.3.6 и аппаратуру 1.4 цифровой связи поступают на управляющую ЭВМ 1.1 НЦК 1.
ЭВМ 1.1 на основе алгоритмов нечеткой логики анализирует все признаки сигналов РЛС 2.1, ОЭС 2.2 и РТР 2.3 (траекторные, спектральные, поляризационные), проводит их отождествление и формирует единое поле воздушной обстановки с учетом угроз и важности БПЛА.
На основе сформированной воздушной обстановки ЭВМ 1.1 организует целераспределение БПЛА между средствами 3.1-3.6 нейтрализации (СН) 3 с учетом боевых возможностей этих средств и уязвимости БПЛА, в том числе гиперскоростных, планирующих, мини и микро БПЛА в диэлектрическом и металлическом корпусе.
Результаты целераспределения с ЭВМ 1.1 через систему 1.4 связи НЦК 1 поступают на воздушный перехватчик 3.1 БПЛА (БПЛАП) и на соответствующие ОПУ и ССП средств 3.2-3.6 нейтрализации БПЛА.
При этом перехватчик 3.1 вылетает в район целеуказания и ведет свободный поиск БПЛА, измерение параметров излучения его аппаратуры связи и навигации БПЛА и глушение указанных каналов управления. В случае обнаружения наземного источника радиоуправления БПЛА перехватчик 3.1 отстреливает в его сторону миниракету с радиоголовкой самонаведения. Результат поражения источника радиоуправления БПЛА и глушения каналов управления оценивается по пропаданию команд управления и изменению траектории движения БПЛА соответственно. При наличии «роя» мини и микро БПЛА перехватчик 3.1 выбрасывает на их пути движения выкидную парашютную сеть с последующим её приземлением с захваченными БПЛА. Результаты боевой работы перехватчика 3.1 в режиме реального времени передаются автоматически на ЭВМ 1.1 НЦК 1 через соответствующие каналы радиосвязи.
Одновременно наземные ОПУ и ССП средств 3.2-3.6 нейтрализации БПЛА отрабатывают команды целеуказания.
При этом соответствующий целераспределению БПЛА попадает в зону воздействия конкретных средств 3.2-3.6 нейтрализации наибольшей эффективности.
Так наземный глушитель 3.2 каналов управления БПЛА, получив через НЦК 1 от измерителя 2.3.5 системы РТР 2.3 разведанную информацию о амплитудно-временных (АВХ) и амплитудно-частотных характеристиках (АЧХ) средств связи и навигации бортовой аппаратуры БПЛА настраивает свой блок 3.2.4 генераторов помех на частоту и параметры радиосигналов связи и управления выделенного БПЛА. Эффективность работы глушителя 3.2 по перехвату БПЛА оценивается ЭВМ 1.1 НЦК 1 по исчезновению на экране РЛС 2.1 отметки от БПЛА и/или исчезновению сигналов работы бортовой аппаратуры БПЛА в системе 2.3 РТР, работающей в паре с глушителем 3.2.
Пусковые установки (ПУ) 3.3 ракет 3.3.3 с инфракрасной (ИК) головкой самонаведения распределяются ЭВМ 1.1 НЦК 1 по теплоизлучающим БПЛА, обнаруженным ОЭС 2.2. При отработке целеуказания и развороте стартового блока (СБ) 3.3.2 в направлении на теплоизлучающий БПЛА, установленные в нем ракеты 3.3.3 с помощью ИК-головок обнаруживают выделенный для поражения БПЛА и берут его на автосопровождение. Данные о захвате БПЛА головками самонаведения через модем 3.3.4 связи ПУ 3.3 передаются на ЭВМ 1.4 НЦК 1. ЭВМ 1.4 дает разрешение на старт одной из ракет 3.3.3 на выделенный БПЛА и после вылета ракеты 3.3.3 из стартового блока 3.3.2 разворачивает ПУ 3.3 на очередной теплоизлучающий БПЛА. Оценка поражения теплоизлучающего БПЛА оценивается ЭВМ 1.4 по пропаданию соответствующей радиолокационной отметки с экрана РЛС 2.1 и/или искажению изображения БПЛА, полученному ЭВМ 1.4 от ОЭС 2.2, сопровождавшему выделенный ПУ 3.3 БПЛА.
Зенитные орудия (ЗО) 3.4 в системе 3 нейтрализации ЭВМ 1.4 целераспределяют преимущественно по гиперскоростным и планирующим БПЛА. Перехват указанных БПЛА производится путем постановки на пути их движения заградительного огня пучками игл и/или шрапнели со скоростью стрельбы не менее 1000 выстрелов/мин.
Лазерные установки (ЛУ) 3.5 ЭВМ 1.4 целераспределяют преимущественно по БПЛА с пластмассовым корпусом, распознанных РЛС 2.1 на основе анализа их поляризационных характеристик. При этом поражение таких БПЛА производится путем плавления пластмассовых деталей БПЛА путем фокусировки и/или сведения лазерных лучей на выбранном для поражения БПЛА.
Радиолучевые устройства (РУ) 3.6 ЭВМ 1.4 целераспределяют преимущественно по малоскоростным БПЛА с металлическим корпусом. При этом поражение таких БПЛА производится путем фокусировки на нем электромагнитного излучения с плотностью энергии, достаточной для электрического разряда электромагнитной волны через металлическую обшивку БПЛА и возникновения внутри корпуса БПЛА наведенного электрического поля с напряженностью, достаточной для электропробоя электронной аппаратуры БПЛА.
Оператор через АРМ 1.2 или выносной пульт управления 1.3 НЦК 1 имеет возможность самостоятельного анализа изображений, радиолокационных и радиопеленгационных сигналов для присвоения цели приоритетного признака БПЛА и принятия решения по его нейтрализации.
Такое конструктивное выполнение системы наблюдения и противодействия (СНП) БПЛА позволяет обеспечивать нейтрализацию БПЛА, выполняющих несанкционированные полеты с наименьшим ущербом и наибольшей эффективностью, как в мирное, так и в военное время.
Промышленная применимость
Изобретение разработано на уровне технического проекта и рабочей документации на отдельные элементы системы наблюдения и противодействия (СНП) БПЛА. Разработаны алгоритмы целераспределения для управляющей ЭВМ 1.1 СНП и проведено математическое моделирование системы. Результаты моделирования показали решение поставленной задачи и достижение заявленного технического результата - повышение надежности отражения массового налета сверхзвуковых, планирующих, мини- и микроБПЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЗАЩИТЫ ОБЪЕКТА ОТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2823195C1 |
| Радиолокационная станция обнаружения малоразмерных целей | 2020 |
|
RU2744210C1 |
| УЧЕБНЫЙ ТРЕНАЖЕР БОЕВЫХ РАСЧЕТОВ ЗЕНИТНО-РАКЕТНОГО КОМПЛЕКСА | 2022 |
|
RU2787411C1 |
| СПОСОБ И УСТРОЙСТВО МНОГОФАКТОРНОЙ ЗАЩИТЫ ОБЪЕКТОВ ОТ МИНИАТЮРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2771865C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
| Способ и устройство противодействия беспилотным летательным аппаратам | 2023 |
|
RU2818398C1 |
| Система защиты территориальных и внутренних морских вод | 2020 |
|
RU2742903C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСФОРМИРУЕМЫЙ МНОГОРАЗОВЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ И СПОСОБЫ СТАРТА | 2022 |
|
RU2778177C1 |
Система наблюдения и противодействия беспилотным летательным аппаратам (БПЛА) содержит наземный центр контроля (НЦК) воздушного пространства, средства обнаружения (СО) БПЛА, средства нейтрализации (СН) БПЛА. НЦК содержит управляющую ЭВМ, автоматизированное рабочее место (АРМ), аппаратуру цифровой связи, выносной пункт управления. СО БПЛА содержат радиолокационную станцию, оптико-электронную систему обнаружения и сопровождения БПЛА, систему радиотехнической разведки (РТР). СН БПЛА содержат БПЛА-перехватчик, глушитель каналов связи, пусковую установку ракет, зенитное орудие, лазерную установку, радиолучевое устройство. Обеспечивается повышение надежности отражения массового налета гиперскоростных, планирующих, и малоскоростных мини- и микроБПЛА. 12 з.п. ф-лы, 10 ил. 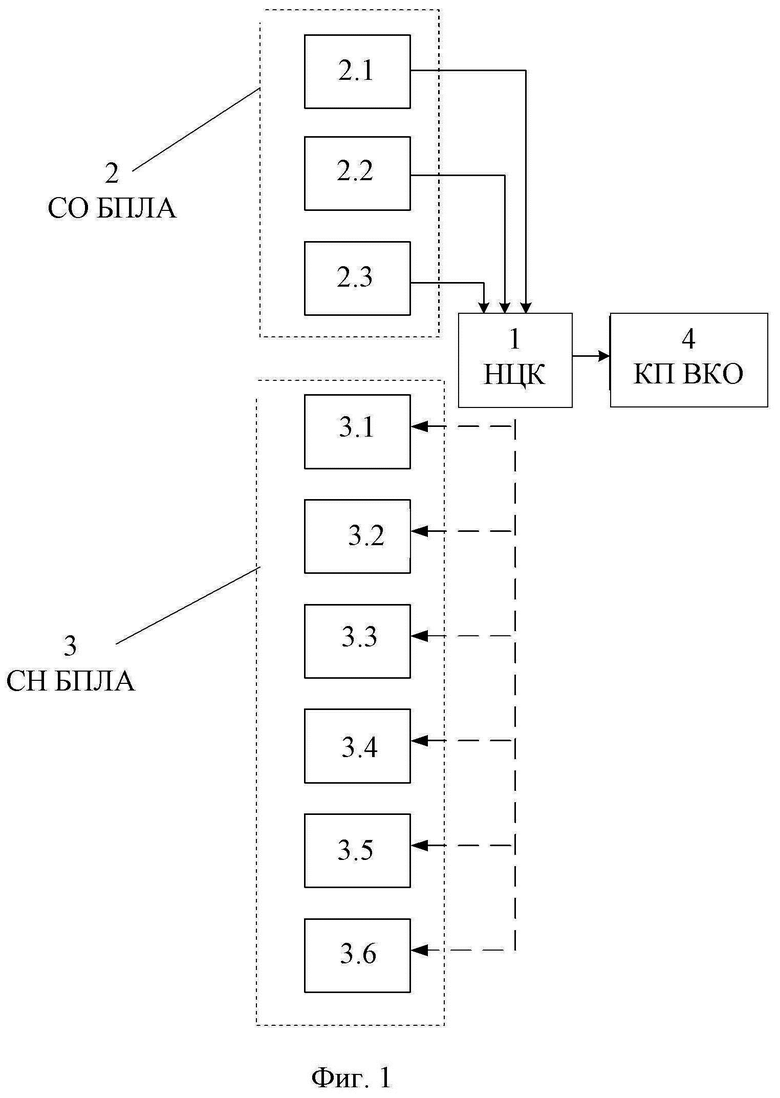
1. Система наблюдения и противодействия (СНП) беспилотным летательным аппаратам (БПЛА), содержащая наземный центр контроля (НЦК) воздушного пространства, соединенный по входу со средствами обнаружения (СО) БПЛА, а по выходу – со средствами нейтрализации (СН) БПЛА, причем СО БПЛА включают не менее одной радиолокационной станции (РЛС), а СН – не менее одного беспилотного летательного аппарата перехватчика (БПЛАП), снабженного радиомодемом связи и средствами захвата и доставки на землю обнаруженного БПЛА, отличающаяся тем, что НЦК выполнен с возможностью оперативного управления разнородными средствами СО и СН, РЛС выполнена с дополнительной возможностью обнаружения мини- и микроБПЛА в пластмассовом корпусе, СО дополнительно содержат не менее одной оптико-электронной системы (ОЭС) обнаружения и сопровождения БПЛА, не менее одной системы радиотехнической разведки (РТР) каналов управления и передачи данных БПЛА, СН дополнительно содержит установленные на отдельных силовых следящих приводах не менее одного глушителя каналов связи и навигации БПЛА, не менее одной пусковой установки ракет для перехвата теплоизлучающих БПЛА, не менее одного зенитного орудия для борьбы с гиперскоростными планирующими БПЛА, не менее одной лазерной установки для плавления пластмассовых корпусов БПЛА, не менее одного радиолучевого устройства для дистанционного электропробоя электронной аппаратуры БПЛА, причем силовые следящие приводы указанных элементов СН по управляющим входам соединены с управляющей ЭВМ через соответствующие каналы связи НЦК.
2. Система по п. 1, отличающаяся тем, что НЦК, выполненный с возможностью управления разнородными средствами СО и СН, содержит соединенные интерфейсными линиями модемной связи управляющую электронную вычислительную машину (ЭВМ), автоматизированное рабочее место (АРМ), выносной пульт управления системой и аппаратуру цифровой связи с выносным пультом, с СО, с СН и с командным пунктом (КП) управления воздушно-космической обороной (ВКО).
3. Система по п. 1, отличающаяся тем, что РЛС обнаружения БПЛА, выполненная с возможностью обнаружения мини и микро БПЛА в пластмассовом корпусе, содержит зеркальную приемопередающую антенну кругового обзора с cosec2 лучом в угломестной плоскости и узким лучом в азимутальной плоскости, соединенную по сигналам зондирования через антенный переключатель и передатчик с формирователем последовательности зондирующих сигналов (ЗС) наносекундной и микросекундной длительности, а по ответным сигналам - через антенный переключатель, четырехканальный приемник сигналов горизонтальной и вертикальной поляризации, устройство цифровой обработки сигналов, цифровой коррелятор, автоматизированное рабочее место (АРМ) РЛС и радиомодем связи с аппаратурой цифровой связи НЦК, причем ЗС наносекундной и микросекундной длительности выполнены соответственно немодулированными и с внутриимпульсной модуляцией с паузой между ними доли мкс и разнесением их по частоте на 1-50 МГц.
4. Система по п. 1, отличающаяся тем, что ОЭС обнаружения БПЛА с возможностью автосопровождения и идентификации типа БПЛА содержит установленные на силовом следящем приводе (ССП) и последовательно соединенные по фототелевизионным сигналам блок объективов, блок матричных фотоприемников, аналого-цифровой преобразователь (АЦП) и модем радиосвязи с аппаратурой цифровой связи НЦК, причем блок объективов содержит телескопические объективы с фокусным расстоянием от 130 до 1450 мм для обеспечения автосопровождения и идентификации типа БПЛА в ближней, средней и дальней зоне их обнаружения соответственно.
5. Система по п. 1, отличающаяся тем, что система РТР содержит модем радиосвязи с аппаратурой цифровой связи НЦК, а также установленные на силовом следящем приводе (ССП) и последовательно соединенные широкополосную антенну, широкополосный радиоприемник с цифровым выходом, цифровой спектроанализатор, измеритель параметров средств связи и навигации бортовой аппаратуры БПЛА, соединенный с сигнальным входом модема, управляющий выход которого соединен с входом ССП.
6. Система по п. 1, отличающаяся тем, что глушитель каналов связи и навигации БПЛА содержит установленные на силовом следящем приводе (ССП) и последовательно соединенные модем радиосвязи с аппаратурой цифровой связи НЦК, блок генераторов помех, блок усилителей помех и блок антенных излучателей для глушения высотомера, навигатора и каналов управления БПЛА.
7. Система по п. 1, отличающаяся тем, что пусковая установка (ПУ) ракет для перехвата теплоизлучающих БПЛА содержит силовой следящий привод (ССП), на котором установлен стартовый блок (СБ) ракет с тепловыми головками самонаведения (ГСН), причем ССП и СБ соединены через радиомодем связи с НЦК.
8. Система по п. 1, отличающаяся тем, что зенитное орудие для борьбы с гиперскоростными планирующими БПЛА содержит установленные на ОПУ мобильной платформы малокалиберную зенитную пушку заградительного огня, питающее устройство выстрелов пучками игл или шрапнели, радиомодем и антенну связи с аппаратурой цифровой связи НЦК.
9. Система по п. 8, отличающаяся тем, что зенитная пушка заградительного огня выполнена турельного типа, калибром не более 35 мм и со скорострельностью не менее 1000 выстрелов в минуту.
10. Система по п. 1, отличающаяся тем, что лазерная установка для плавления пластмассовых корпусов БПЛА содержит радиомодем связи с аппаратурой цифровой связи НЦК, а также установленные на ОПУ многолучевой волоконный лазер с оптической системой сведения лучей.
11. Система по п. 1, отличающаяся тем, что радиолучевое устройство для дистанционного электропробоя электронной аппаратуры БПЛА содержит генератор мощных электромагнитных импульсов (ЭМИ) сантиметрового диапазона электромагнитных волн, соединенный через волноводную систему, заполненную нейтральным газом, с входом излучателя ЭМИ, генератор ЭМИ установлен в электроизолированной мобильной кабине, а излучатель ЭМИ – на ОПУ, установленном на крыше кабины, при этом генератор ЭМИ и ОПУ 3 по управляющим входам соединены с аппаратурой цифровой связи НЦК через радиомодемом связи.
12. Система по п. 9, отличающаяся тем, что генератор ЭМИ выполнен в виде магнетрона или клистрона, а излучатель ЭМИ - в виде линзы Касегрена, включающей рефлектор и контррефлектор, или в виде рефлектора, по внешней вогнутой поверхности которого равномерно распределены твердотельные усилители ЭМИ.
13. Система по п. 1, отличающаяся тем, что беспилотный летательный аппарат перехватчик (БПЛАП) дополнительно содержит обнаружитель источника сигналов управления БПЛА, не менее одной миниракеты с головкой самонаведения для уничтожения источника управления и/или не менее одного глушителя каналов связи БПЛА.
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
| СПОСОБ БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ БЛИЖНЕГО И МАЛОГО РАДИУСА ДЕЙСТВИЯ С ПОМОЩЬЮ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ДЕЦИМЕТРОВОГО ДИАПАЗОНА ДЛИН ВОЛН | 2013 |
|
RU2551821C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗДЕЛИЙ ИЗ БИСЕРНОГО ПЕНОПОЛИСТИРОЛА | 0 |
|
SU178484A1 |
| WO 2020084322 A1, 30.04.2020 | |||
| WO 2016122739 A3, 04.08.2016 | |||
| US 10670696 B2, 02.06.2020. | |||

