Область применения изобретения
Настоящее изобретение относится по существу к радиочастотной (РЧ) абляции, и в частности к РЧ-абляции сердца.
Предпосылки создания изобретения
Методы управления РЧ-абляцией были ранее предложены в патентной литературе. Например, в публикации заявки на патент США № 2016/0213282 описан способ и аппарат, в которых используют интеграл усилия во времени, для оценки в реальном времени размера повреждения в системах абляции на основе катетера. Устройство измеряет силу, приложенную к целевой ткани зондом для контактной абляции, и интегрирует силу по времени подачи питания зонда для выполнения абляции. Интеграл по времени от силы можно вычислять и использовать для получения оцененного размера поврежденного участка (глубины, объема и/или площади) в реальном времени. Интеграл по времени от силы может также учитывать изменения мощности, подаваемой к целевой ткани в реальном времени для получения уточненной оценки размера поврежденного участка. В одном варианте осуществления измерение усилия можно использовать в качестве обратной связи для установления необходимого уровня мощности, подаваемой на зонд, для предотвращения появления пара. В других вариантах осуществления система управления может быть выполнена с возможностью увеличения орошения в дополнение к уменьшению или отключению питания или вместо этого.
В другом примере в патенте США 9,962,217 описаны системы абляции ткани и способы, в которых сердечный катетер оснащен детектором давления для определения механического усилия, прикладываемого к дистальному кончику при соприкосновении с участком абляции. В зависимости от давления детектора контроллер вычисляет объем абляции в соответствии с взаимным соотношением между контактным давлением на участок, выходной мощностью аблятора и временем подачи энергии. Система подает указанную дозу энергии в течение определенного времени подачи и на определенном уровне мощности к ткани для ее абляции, причем по меньшей мере один параметр из времени подачи дозы и уровня мощности зависит от механического усилия. Монитор может динамически отображать развитие абляции путем изменения визуальной индикации рассчитанного объема абляции.
Изложение сущности изобретения
В варианте осуществления настоящего изобретения предложен способ абляции ткани тела, включающий генерирование абляционного сигнала и подачу абляционного сигнала на абляционный зонд, находящийся в контакте с тканью. Орошающая жидкость подается в абляционный зонд для нанесения орошающей жидкости вблизи ткани при подаче абляционного сигнала к ткани. Сигналы принимаются от абляционного зонда и указывают на оцененное мгновенное усилие контакта, которое абляционный зонд прикладывает к ткани. Скорость потока орошающей жидкости можно корректировать в зависимости от оцененного мгновенного усилия контакта.
В некоторых вариантах осуществления способ дополнительно включает мониторинг температуры ткани и коррекцию скорости потока для орошения в зависимости от измеренной температуры.
В некоторых вариантах осуществления коррекция скорости потока включает увеличение или уменьшение скорости потока, сохраняя максимальный уровень мощности абляционного сигнала в течение наименьшей продолжительности абляции.
В варианте осуществления продолжительность абляции и максимальный уровень мощности представляют собой предварительно заданные константы.
В другом варианте осуществления способ дополнительно включает непрерывную оценку индекса абляции одновременно с приложением абляционного сигнала и прекращение абляционного сигнала при достижении индексом абляции порогового значения индекса абляции.
В некоторых вариантах осуществления индекс абляции зависит от уровня мощности абляционного сигнала.
В некоторых вариантах осуществления индекс абляции зависит от мгновенного усилия контакта.
В варианте осуществления коррекция скорости потока в зависимости от оцененного мгновенного усилия контакта включает увеличение или уменьшение скорости потока в зависимости от соответствующего оцененного увеличения или уменьшения мгновенной силы контакта.
В соответствии с вариантом осуществления настоящего изобретения дополнительно предложена система для абляции ткани тела, включающая генератор, модуль орошения и процессор. Генератор выполнен с возможностью генерирования абляционного сигнала и подачи абляционного сигнала на абляционный зонд, находящийся в контакте с тканью. Модуль орошения выполнен с возможностью подачи орошающей жидкости к абляционному зонду для нанесения орошающей жидкости вблизи ткани при приложении абляционного сигнала к ткани. Процессор выполнен с возможностью приема сигналов абляционного зонда, указывающих оцененное мгновенное усилие контакта, которое абляционный зонд прикладывает к ткани, и с возможностью управления модулем орошения для коррекции скорости потока орошающей жидкости в зависимости от оцененного мгновенного усилия контакта.
Настоящее изобретение станет более понятным из следующего подробного описания вариантов осуществления, представленных вместе со следующими графическими материалами.
Краткое описание графических материалов
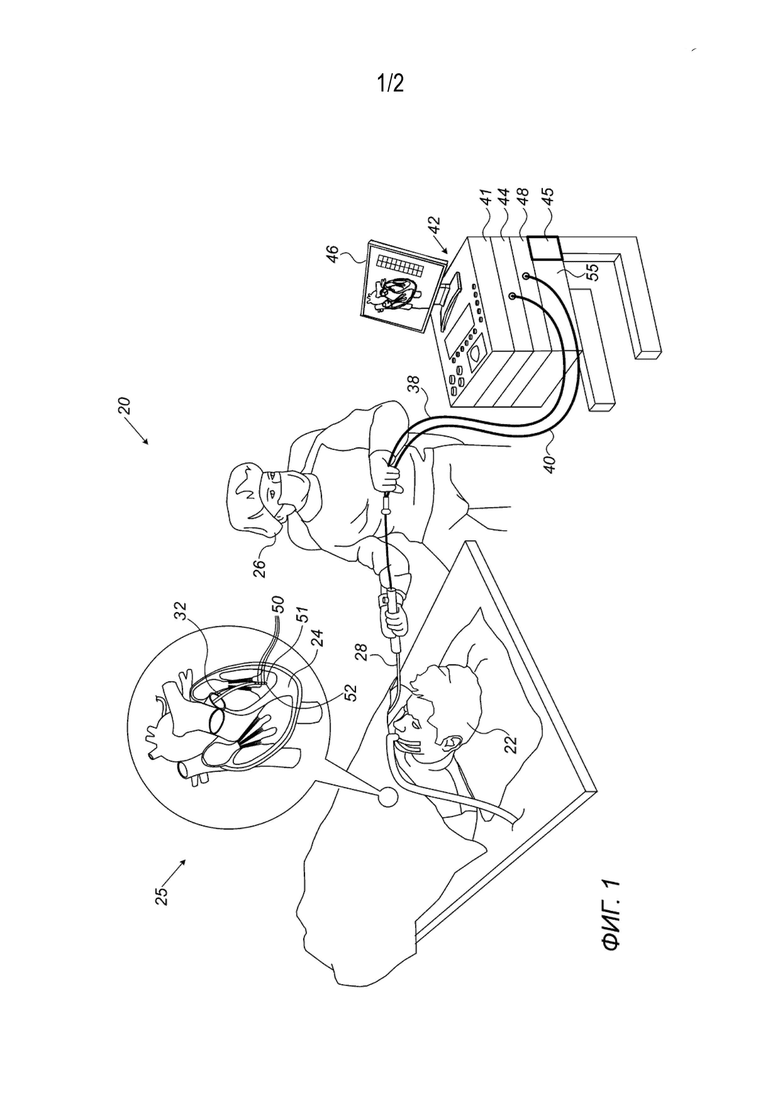
На Фиг. 1 представлено схематичное изображение системы для радиочастотной (РЧ) абляционной терапии сердца в соответствии с вариантом осуществления настоящего изобретения.
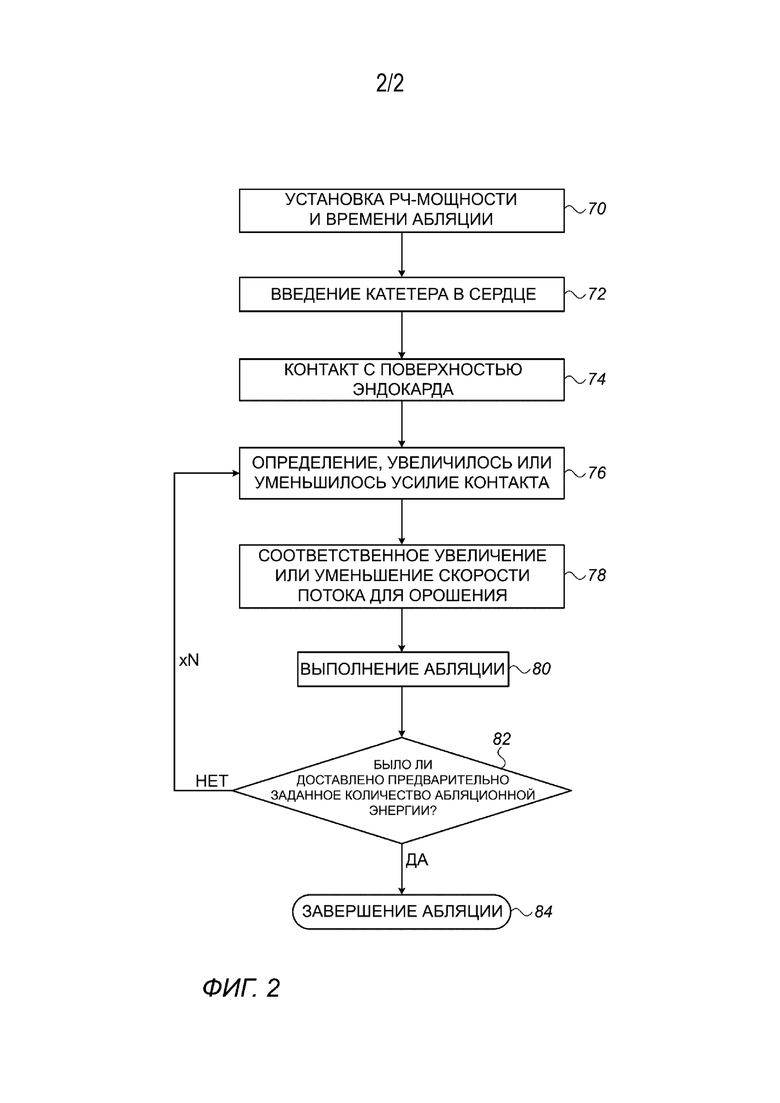
На Фиг. 2 представлена блок-схема, на которой схематически показаны стадии алгоритма, выполняемого во время работы системы РЧ-абляции, изображенной на Фиг. 1, в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Общее описание
Для управления процессом абляции, направленным на создание повреждения заданного размера в системах абляции сердца, таких как системы радиочастотной (РЧ) абляции, есть возможность изменения скорости орошения, входной мощности абляции (например, РЧ) и продолжительности абляции, при этом предотвращается превышение максимального значения температуры подвергаемой абляции ткани. Тем не менее конечный размер повреждения может различаться из-за изменения механического усилия, с которым абляционный электрод приводят в контакт с тканью во время абляции. Таким образом, если не компенсировать изменение контактной силы, может быть получен неконтролируемый и/или неточный результат РЧ-абляции.
В вариантах осуществления настоящего изобретения, которые описаны далее в настоящем документе, предложены улучшенные способы и системы для РЧ-абляции. Основное предположение в описанных методах основано на том, что единственными переменными во время РЧ-абляции для конкретного размера повреждения в пределах предварительно заданного времени являются мгновенное (т. е. кратковременное) усилие контакта, прилагаемое к подвергаемой абляции ткани, скорость потока для орошения и температура ткани. Принимая во внимание приблизительное постоянство температуры ткани, в некоторых вариантах осуществления подаваемая мощность остается по существу постоянной, а компенсация на измеренные изменения мгновенного усилия контакта происходит за счет коррекции скорости потока для орошения.
Как правило, для продолжения процесса абляции в условиях повышенного мгновенного усилия контакта, процессор, выполняющий алгоритм абляции, может подавать команду на увеличение скорости потока для орошения в пределах допустимого диапазона. При уменьшении мгновенного усилия контакта процессор, выполняющий алгоритм абляции, может подавать команду на уменьшение скорости потока для орошения для сохранения эффективности процесса абляции.
В других вариантах осуществления изменения измеренной температуры также компенсируют путем коррекции скорости потока для орошения. Как правило, процессор отслеживает температуру ткани и подает команду на коррекцию скорости потока для орошения (например, увеличение или уменьшение) в зависимости от измеренной температуры, а в некоторых вариантах осуществления в зависимости от соответствующего увеличения или уменьшения измеренной температуры.
В некоторых вариантах осуществления описанный способ включает стадии (а) вставки зонда, такого как катетер, в тело живого субъекта, (b) приведения зонда в контакт с тканью тела, (c) предварительной установки выходного уровня мощности и времени абляции, (d) предварительной установки диапазона допустимой скорости потока для орошения, (e) измерения мгновенного усилия контакта, (f) генерирования абляционного сигнала и передачи абляционного сигнала на абляционный зонд, находящийся в контакте с тканью (т. е. нанесение в ткань предварительно заданного количества энергии посредством одного или более абляционных электродов зонда), (g) подачу орошающей жидкости к абляционному электроду для нанесения орошающей жидкости вблизи ткани во время приложения абляционного сигнала к ткани, (h) прием от абляционного зонда сигналов, указывающих на оцененное мгновенное усилие контакта, которое абляционный зонд прикладывает к ткани, и (j) коррекцию скорости потока орошающей жидкости в ответ на оцененное мгновенное усилие контакта.
В некоторых вариантах осуществления предложена система абляции ткани тела, которая включает (i) память, выполненную с возможностью сохранения значения целевого количества энергии абляции, необходимой для создания указанного повреждения в ткани тела пациента, и дополнительно сохраняет соответствующие значения максимального уровня мощности и наименьшей продолжительности абляции (ii) модуля орошения, выполненного с возможностью подачи орошающей жидкости к абляционному зонду, причем абляционный зонд выполнен с возможностью: (iia) вступления в контакт с тканью, (iib) нанесения орошающей жидкости вблизи ткани. Абляционный зонд дополнительно включает средства для определения мгновенного усилия контакта, прикладываемого зондом к ткани.
Предложенная система дополнительно включает генератор, который выполнен с возможностью генерирования абляционного сигнала и подачи абляционного сигнала на абляционный зонд, и процессор, который выполнен с возможностью: (a) приема от абляционного зонда сигналов, указывающих оцененное мгновенное усилие контакта, которое абляционный зонд прикладывает к ткани, (b), и управления модулем орошения для коррекции скорости потока орошающей жидкости в зависимости от оцененного мгновенного усилия контакта.
Благодаря описанной методике РЧ-абляции, с помощью которой компенсируют изменение мгновенного усилия контакта, которое электрод прикладывает к ткани, путем соответствующего изменения скорости потока для орошения, можно поддерживать максимальный уровень РЧ-мощности в течение наименьшей продолжительности абляции и, таким образом, можно улучшать клинический результат процедуры РЧ-абляции на основе катетера.
Описание системы
На Фиг. 1 представлена схематическая наглядная иллюстрация системы 12 для радиочастотной (РЧ) абляционной терапии сердца в соответствии с вариантом осуществления настоящего изобретения. Как правило, память 45 системы 20 хранит множество протоколов абляции для различных клинических ситуаций, таких как протокол, описанный на Фиг. 2.
Врач 26 вводит катетер 28 через кровеносный сосуд в камеру сердца 24 субъекта 22 и манипулирует катетером с обеспечением контакта дистального конца 32 катетера с эндокардом в области, подлежащей лечению. Точечный электрод 51 катетера 28, показанный на вставке 25, содержит один или более датчиков 50 контактного усилия.
После расположения дистального конца 32 на участке абляции и обеспечения контакта кончика с эндокардом оператор 26 приводит в действие генератор 44 РЧ-энергии с помощью пульта 42 управления для подачи РЧ-энергии посредством кабеля 38 к дистальному концу 32. При этом модуль 55 орошения, содержащий управляемый насос 48 для орошения, подает охлаждающую текучую среду, такую как нормальный солевой раствор, через трубку 40 и просвет в катетер 28 к дистальному концу. Как правило, как до, так и во время абляции врач 26 видит отображенные на дисплее 46 значения параметров абляции, такие как перечисленные в таблице I ниже.
Чтобы управлять системой 12, процессор 41 контролирует работу модуля 55 орошения, как дополнительно описано ниже. В частности, процессор 41 выполняет специальный алгоритм, описанный в настоящем документе и показанный на Фиг. 2, благодаря которому процессор 41 выполняет стадии, дополнительно описанные ниже.
Можно координировать работу генератора РЧ-энергии и насоса для орошения, чтобы обеспечивать соответствующий объем орошения во время абляции так, чтобы охлаждать кончик катетера и ткань и при этом не перегружать сердце орошающей жидкостью. В пульт 42 управления поступает обратная связь от каждого датчика 50 усилия контакта для применения в управлении скоростью потока орошающей жидкости.
В варианте осуществления во время абляции один или более датчиков 52 температуры, расположенных в точечном электроде 51 катетера 28, могут принимать температуру ткани и передавать сигнал, указывающий температуру, процессору 41 для анализа и применения.
Процессор 41 использует программное обеспечение, хранящееся в памяти 45, для управления системой 20. Программное обеспечение может быть загружено в процессор 41 в электронном виде, например передано по сети, или в альтернативном или дополнительном варианте осуществления оно может быть предоставлено и/или может храниться на энергонезависимом материальном носителе, таком как магнитная, оптическая или электронная память. В частности, процессор 41 выполняет специальный алгоритм, описанный в настоящем документе и показанный на Фиг. 2, благодаря которому процессор 41 выполняет стадии, дополнительно описанные ниже.
Несмотря на то что изображенный на рисунке вариант осуществления относится конкретно к применению устройства точечной абляции для абляции ткани сердца, способы, описанные в настоящем документе, могут быть альтернативно применены к устройствам абляции, содержащим множество абляционных электродов, в случаях, в которых процессор 41 независимо управляет осуществлением орошения каждым электродом. В альтернативном варианте осуществления процессор 41 управляет потоком орошающей жидкости, общим для всех электродов. С помощью обратной связи о максимальном мгновенном усилии контакта на всех электродах процессор корректирует общую скорость потока для орошения.
КОРРЕКЦИЯ СКОРОСТИ ОРОШЕНИЯ ПРИ РАДИОЧАСТОТНОЙ (РЧ) АБЛЯЦИИ В ОТВЕТ НА ИЗМЕНЕНИЕ УСИЛИЯ КОНТАКТА
На Фиг. 2 представлена блок-схема, на которой схематически показаны стадии алгоритма, выполняемого при работе системы 20 РЧ-абляции, изображенной на Фиг. 1, в соответствии с вариантом осуществления настоящего изобретения. Способ начинается со стадии 70 предварительной настройки диапазона параметров, в течение которой врач 26 задает мощность и время (т. е. продолжительность) абляции. Такая стадия может включать в себя создание множества протоколов для различных клинических ситуаций, при этом такие протоколы сохраняются, например, в памяти 45 системы 20.
В варианте осуществления значения/диапазоны заданы так, как показано в таблице I.
Таблица I
Стадию 70 задания диапазона параметров осуществляют до выполнения абляции врачом 26. В частности, время абляции (т. е. продолжительность абляции) и максимальный уровень мощности представляют собой предварительно заданные константы. Однако значения/диапазоны мощности, времени и скорости потока могут быть установлены по-разному, например с целевым значением глубины повреждения. Таблицы для малой глубины (менее 2 мм), средней глубины (2-3,5 мм), большой глубины (3,5-5,0 мм) и очень большой глубины (более 5,0 мм) описаны в заявке на патент США 16/288,838, поданной 28 февраля 2019 г., под названием «Energy-Guided Radiofrequency (RF) Ablation», которая принадлежит патентообладателю настоящей заявки и описание которой включено в настоящий документ путем ссылки.
В некоторых вариантах осуществления длительность (T) абляции определяют во время абляции, обеспечивая максимально допустимый индекс абляции (AI), т. е. пороговое значение индекса абляции (AIT), который представляет собой интеграл от уровня мощности, умноженного на усилие контакта в течение периода времени, и решая интеграл для получения продолжительности в зависимости от заданного входного AIT. Процессор выполнен с возможностью непрерывной оценки AI во время процесса абляции и с возможностью прекращения абляции при достижении AI значения AIT.
Один пример уравнения AIT описан в публикации заявки на патент США 2017/0014181, которая принадлежит правообладателю настоящей заявки и содержание которой включено в настоящий документ путем ссылки. В данном примере пороговое значение индекса абляции (AIT), обозначенное как AIT1, имеет форму  где интеграл рассчитывают в течение периода времени T от произведения усилия контакта CF, возведенного в первую степень, отличную от единицы, α, и мощности P, возведенной во вторую степень, отличную от единицы, β, k представляет собой коэффициент пропорциональности, а γ представляет собой третий показатель степени, отличный от единицы. Значения α,β,γ и k определяют способами, описанными в вышеупомянутой публикации заявки на патент США № 2017/0014181. В альтернативном варианте осуществления процессор использует второе уравнение для расчета AIT, обозначаемое как AIT2, для определения длительности абляции, причем второе AIT рассчитывают по формуле
где интеграл рассчитывают в течение периода времени T от произведения усилия контакта CF, возведенного в первую степень, отличную от единицы, α, и мощности P, возведенной во вторую степень, отличную от единицы, β, k представляет собой коэффициент пропорциональности, а γ представляет собой третий показатель степени, отличный от единицы. Значения α,β,γ и k определяют способами, описанными в вышеупомянутой публикации заявки на патент США № 2017/0014181. В альтернативном варианте осуществления процессор использует второе уравнение для расчета AIT, обозначаемое как AIT2, для определения длительности абляции, причем второе AIT рассчитывают по формуле  .
.
В начале сеанса абляции на стадии 72 введения катетера врач 26 вводит катетер 28 в желаемое положение в сердце 24 с помощью системы отслеживания положения катетера, встроенной в систему 20.
Затем врач 26 создает физический контакт между кончиком электрода 51 и тканью эндокарда на стадии 74 контакта электрода с тканью. Процессор 41 принимает сигналы, указывающие на усилие контакта, от датчиков на катетере 28 и определяет мгновенное усилие контакта и/или увеличение или уменьшение усилия контакта на стадии 76 определения усилия контакта.
На стадии 78 орошения процессор 41 управляет модулем 55 орошения для увеличения или уменьшения скорости потока для орошения в зависимости от определенного соответствующего увеличения или уменьшения мгновенного механического усилия. Например, при увеличении мгновенного усилия контакта процессор 41 впоследствии дает команду модулю 55 на мгновенное увеличение потока орошающей жидкости так, чтобы скорость удаления тепла посредством орошения соответствовала увеличению депонированного тепла из-за лучшего физического контакта между электродом и тканью. С другой стороны при уменьшении мгновенного усилия контакта, означающем меньшее депонирование тепла и возможность преувеличенного охлаждения ткани, процессор 41 дает команду модулю 55 орошения на немедленное снижение потока орошающей жидкости.
На стадии 80 доставки РЧ врач 26 управляет системой 20 при выбранных на стадии 70 значениях параметров, чтобы выполнять абляцию электродом 51. Экран 46 системы 20 может быть выполнен с возможностью отображения хода РЧ-доставки на электроде для врача 26 способами, известными в данной области.
Во время процедуры РЧ-доставки процессор 41 отслеживает мгновенное усилие контакта с помощью N повторных измерений, каждый раз возвращаясь к стадии 78. Число повторений N рассчитывают на основании времени абляции и скорости измерения усилия контакта в таблице I, например N=20. Процессор 41 соответствующим образом управляет модулем 55 орошения с возможностью изменения скорости потока орошающей жидкости в соответствии с мгновенным усилием контакта за счет повторения стадии 78.
При каждом повторении процессор 41 проверяет, доставлено ли предварительно заданное количество абляционной энергии, на стадии 82 мониторинга энергии абляции. На стадии 84 окончания абляции процессор 84 завершает абляцию после достижения энергии абляции, обусловленной предварительно установленными на стадии 70 значениями мощности и времени, или по истечении указанного времени.
Пример блок-схемы, показанный на Фиг. 2, приведен исключительно для обеспечения концептуальной ясности. Скорость измерения усилия контакта приведено в качестве примера, при этом можно использовать большую скорость. Настоящий вариант осуществления также содержит дополнительные стадии алгоритма, такие как проверка температуры ткани, которые были намеренно исключены из описания в настоящем документе для упрощения блок-схемы.
Несмотря на то что варианты осуществления, описанные в настоящем документе, главным образом касаются кардиологического применения, способы и системы, описанные в настоящем документе, можно также применять для абляции других органов тела, например почек (например, для денервации почки) и легких.
Таким образом, следует понимать, что описанные выше варианты осуществления приведены лишь в качестве примера и что настоящее изобретение не ограничено конкретно изображенным и описанным выше в настоящем документе. Напротив, объем настоящего изобретения включает как комбинации, так и подкомбинации различных вышеописанных признаков, а также их варианты и модификации, которые будут очевидны специалистам в данной области после ознакомления с приведенным выше описанием и которые не были описаны на предшествующем уровне техники. Документы, включенные в настоящую заявку на патент путем ссылки, следует считать неотъемлемой частью заявки, за исключением того, что, если определение терминов в этих включенных документах противоречит определениям, сделанным явным или неявным образом в настоящем описании, следует учитывать только определения настоящего описания.
Группа изобретений относится к медицинской технике. Способ и работа устройства абляции ткани тела включает генерирование абляционного сигнала и подачу абляционного сигнала на абляционный зонд, находящийся в контакте с тканью. Орошающая жидкость подается в абляционный зонд для нанесения орошающей жидкости вблизи ткани при подаче абляционного сигнала к ткани. Сигналы принимаются от абляционного зонда и указывают на оцененное мгновенное усилие контакта, которое абляционный зонд прикладывает к ткани. Скорость потока орошающей жидкости можно корректировать в зависимости от оцененного мгновенного усилия контакта. 2 н. и 14 з.п. ф-лы, 2 ил.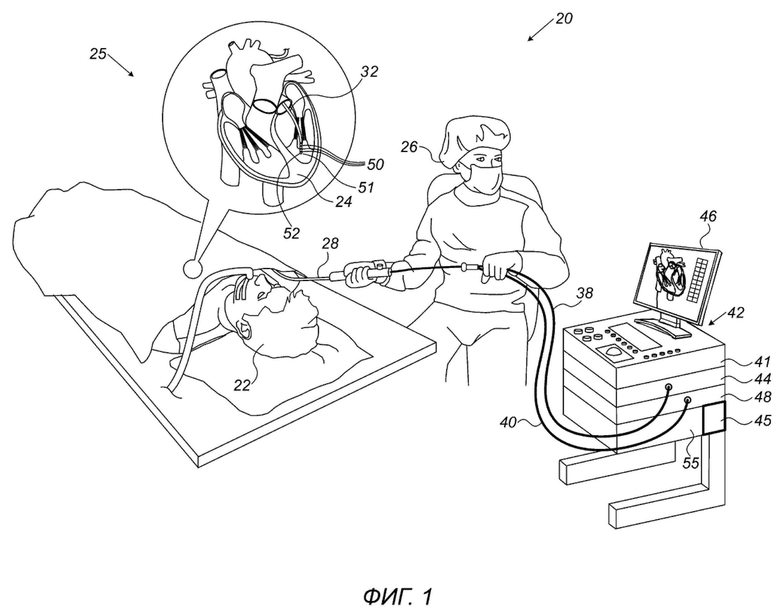
1. Способ абляции тканей тела, при этом способ включает этапы, на которых:
генерируют абляционный сигнал и подают абляционный сигнал на абляционный зонд, находящийся в контакте с тканью;
подают орошающую жидкость к абляционному зонду для нанесения орошающей жидкости вблизи ткани во время приложения абляционного сигнала к ткани;
принимают от абляционного зонда сигналы, указывающие оцененное мгновенное усилие контакта, которое абляционный зонд прикладывает к ткани; и
корректируют скорость потока орошающей жидкости в ответ на оцененное мгновенное усилие контакта.
2. Способ по п. 1, включающий мониторинг температуры ткани и коррекцию скорости потока для орошения в зависимости от измеренной температуры.
3. Способ по п. 1, в котором коррекция скорости потока включает увеличение или уменьшение скорости потока, сохраняя максимальный уровень мощности абляционного сигнала в течение наименьшей продолжительности абляции.
4. Способ по п. 3, в котором продолжительность абляции и максимальный уровень мощности представляют собой предварительно заданные константы.
5. Способ по п. 3, включающий непрерывную оценку индекса абляции одновременно с приложением абляционного сигнала и прекращение абляционного сигнала при достижении индексом абляции порогового значения индекса абляции.
6. Способ по п. 5, в котором индекс абляции зависит от уровня мощности абляционного сигнала.
7. Способ по п. 5, в котором индекс абляции зависит от мгновенного усилия контакта.
8. Способ по п. 1, в котором коррекция скорости потока в зависимости от оцененного мгновенного усилия контакта включает увеличение или уменьшение скорости потока в зависимости от соответствующего оцененного увеличения или уменьшения мгновенной силы контакта.
9. Система для абляции тканей тела, содержащая:
генератор, выполненный с возможностью генерирования абляционного сигнала и подачи абляционного сигнала на абляционный зонд, находящийся в контакте с тканью;
модуль орошения, выполненный с возможностью подачи орошающей жидкости к абляционному зонду для нанесения орошающей жидкости вблизи ткани при приложении абляционного сигнала к ткани; и
процессор, выполненный с возможностью:
приема от абляционного зонда сигналов, указывающих оцененное мгновенное усилие контакта, которое абляционный зонд прикладывает к ткани; и
управления модулем орошения для коррекции скорости потока орошающей жидкости в ответ на оцененное мгновенное усилие контакта.
10. Система по п. 9, в которой процессор дополнительно выполнен с возможностью отслеживания температуры ткани и управления модулем орошения для коррекции скорости потока в зависимости от измеренной температуры.
11. Система по п. 9, в которой процессор выполнен с возможностью управления модулем орошения для коррекции скорости потока и поддержания максимального уровня мощности абляционного сигнала в течение наименьшей продолжительности абляции.
12. Система по п. 11, содержащая память, которая выполнена с возможностью хранения значений максимального уровня мощности и наименьшей продолжительности абляции в виде предварительно заданных констант.
13. Система по п. 9, в которой процессор выполнен с возможностью управления модулем орошения для коррекции скорости потока в зависимости от мгновенного усилия контакта путем передачи модулю орошения команды на увеличение или уменьшение скорости потока в зависимости от соответствующего оцененного увеличения или уменьшения мгновенного усилия контакта.
14. Система по п. 9, в которой процессор выполнен с возможностью непрерывной оценки индекса абляции и прекращения абляционного сигнала при достижении индексом абляции порогового значения индекса абляции.
15. Система по п. 14, в которой индекс абляции зависит от уровня мощности абляционного сигнала.
16. Система по п. 14, в которой индекс абляции зависит от мгновенного усилия контакта.
| US 20160213282 A1, 28.07.2016 | |||
| US 2016143696 A1, 26.05.2016 | |||
| КАТЕТЕР С РЕГУЛИРУЕМОЙ ДУГООБРАЗНОЙ ДИСТАЛЬНОЙ СЕКЦИЕЙ | 2012 |
|
RU2542088C2 |

