ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к управлению абляцией и, более конкретно, к управлению в реальном времени для достижения заданного размера поражения.
УРОВЕНЬ ТЕХНИКИ, ОТНОСЯЩЕЙСЯ К ИЗОБРЕТЕНИЮ
Абляционная терапия опухолей, использующая высокоинтенсивное фокусируемое ультразвуковое излучение (HIFU), исследовалась в течение многих лет и сейчас прокладывает свой путь на рынок США и к клиническим испытаниям.
Опухоль, такая как раковая опухоль, может подвергаться медицинскому лечению посредством хирургии или химиотерапии. Абляционная терапия предлагает менее инвазивную альтернативу. Абляция может выполняться различными альтернативными способами, такими как нагревание (например, радиочастотная (RF) абляция, абляция высокоинтенсивным фокусируемым ультразвуковым излучением (HIFU), микроволновая и лазерная абляция), замораживание (например, криогенная абляция) и химический способ воздействия.
HIFU абляция является неинвазивной, поскольку тепловая энергия подается снаружи тела, чтобы быть сфокусированной на опухоли, но эта энергия не является настолько концентрированной, чтобы причинить вред коже или более глубоким тканям, прежде чем сконцентрироваться на целевой опухоли.
Тепловая абляция, такая как HIFU абляция, повышает температуру в фокальной точке до тех пор, пока опухоль, которая может быть злокачественной, не будет некрозирована, то есть убита, в точке абляции. Некрозированная ткань тела известна как поражение. Затем процедура переходит к другой точке абляции и продолжается точка за точкой, пока не будет подвержена абляции вся опухоль.
Абляция управляется в соответствии с изображениями зоны, подлежащей обработке. Визуализация может осуществляться посредством ультразвукового, магнитно-резонансного (MRI) или рентгеновского способа визуализации, такого как флюороскопия.
MRI используется для управления HIFU при абляции, но является дорогостоящим способом. Дороговизна может ограничивать применение этого способа в исследовательских центрах по всему миру. Кроме того, существует потенциальная проблема совместимости оборудования для тепловой абляции с технологией магнитного резонанса (MR).
Было предложено использовать силу звукового излучения, создаваемого ультразвуком, для мониторинга HIFU абляции.
Ультразвуковая волна сообщает целевой ткани организма "толчок", который концентрируется в фокальной точке волны. Отображаемые данные до и после толчка могут предоставлять информацию о характере ткани организма, подвергнутой этому толчку.
Более конкретно, ткань, некрозированная HIFU терапией или другим средством в конкретном местоположении, становится, до некоторой степени, более жесткой, чем необработанная ткань. Соответственно при той же величине толкающей силы происходит меньшее осевое смещение. Толчок и последующее отслеживание позволяют обнаружить уменьшенное смещение и поэтому могут быть использованы для обнаружения существования поражения, образованного абляцией.
Lizzie и его соавторы (далее "Lizzi") прогнозируют использование смещений, вызванных силой излучения, при мониторинге HIFU абляции в реальном времени. F.Lizzi, R. Muratore, C. Deng, J.A. Ketterling, S.K. Alam, S. Mikaelian, A. Kalisz, Ultrasound in Med & Biol. ("Ультразвук в медицине и биологии"), том 29, № 11, стр. 1593-1605 (2003 г.).
В исследовании Lizzi предлагается, чтобы терапия продолжалась до тех пор, пока она не приведет в результате к заданному изменению характеристик смещения в ответ на толчок.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В аспекте настоящего изобретения предлагается, что необходима концептуализация и реализация более полной методологии успешного мониторинга абляции.
Настоящее изобретение направлено на преодоление ограничений предшествующего уровня техники при мониторинге абляции за счет реализации точного, быстрого, недорогого, простого и удобного способа.
Существующие способы магнитно-резонансной визуализации (MRI) для мониторинга HIFU абляционной терапии, основанные на температуре, являются точными, но требуют применения дорогостоящего комплекта магнитно-резонансной (MR)аппаратуры.
Современный подход к управляемой ультразвуком HIFU (USgHIFU) терапии заключается в том, чтобы оценить протяженность образованного поражения, двигаясь от одной точки абляции до другой точки абляции, после проведения терапии.
Время, затрачиваемое на такую оценку, увеличивает продолжительность абляционной процедуры.
Кроме того, обычным способом является ввод интенсивности абляции и времени обработки и последующее выполнение абляции в точке абляции. Однако настойчивые изобретатели обнаружили, что время обработки не является хорошим индикатором размера поражения. Поэтому существует необходимость в такой процедуре, которая позволит оценить размер поражения (и убедиться в том, что был достигнут желаемый размер поражения, соответствующий плану обработки), прежде чем переносить фокус терапии к следующей точке абляции.
Кроме того, поскольку ультразвуковые решения, используемые сегодня, являются недостаточно точными в предсказании дозы (то есть продолжительности приложения HIFU при текущей интенсивности), подход заключается в превышении дозы во время обработки для уверенного обеспечения некроза всей зоны.
Исследование Lizzi прогнозирует применение силы звукового излучения, ультразвукового способа при мониторинге HIFU в реальном времени и прекращение приложения HIFU, основанное на заданном изменении характеристик смещения.
Однако исследование Lizzi не определяет, какое конкретное изменение должно служить разумной индикацией того, когда должна прекращаться терапия или когда и как осуществляется определение заданного изменения.
Было бы полезно иметь надежный показатель того, когда следует прекратить терапию, который позволит надежно автоматически продолжать абляцию в реальном времени.
Для лучшего решения одного или более из этих вопросов и в соответствии с настоящим изобретением прекращение абляции ткани организма в текущей точке абляции для достижения заданного размера поражения включает в себя мониторинг в реальном времени, применительно к текущей точке абляции, смещения в ответ на силу, приложенную к ткани организма. Одно или более значений смещения, полученных при мониторинге смещения, регистрируются на характеристической кривой. Прекращение в реальном времени абляции в текущей точке абляции основано на такой регистрации. Заданный размер поражения достигается при прекращении.
В другом аспекте прекращение выполняется при обнаружении, осуществляемом посредством мониторинга и после возникновения пикового значения смещения, мониторинг которого осуществляют, конечного значения смещения, мониторинг которого осуществляют.
Еще в другом аспекте конечное значение определяется до этого обнаружения, и это определение осуществляется регистрацией.
В дополнительном аспекте определение конечного значения осуществляется путем регистрации с помощью характеристической кривой.
В другом дополнительном аспекте абляция в точке абляции выполняется циклами толчков и терапии, которые имеют участок мониторинга и участок терапии. Определение конечного значения осуществляется как результат первого цикла.
В другом аспекте определение конечного значения включает в себя построение по точкам кривой применительно к нормированным разностям смещений для соответствующих наблюдаемых размеров поражений. В этом контексте нормированная разность смещений является, применительно к соответствующему одному из поражений, размер которого наблюдался, разностью между нормированным пиковым смещением и нормированным конечным смещением. Здесь конечное смещение, подлежащее нормированию, возникает во времени после пикового смещения, подлежащего нормированию.
В одном другом аспекте характеристическая кривая выводится из эмпирических наблюдений. Определение конечного значения смещения, мониторинг которого осуществляют, дополнительно включает в себя оценку относительно гистологически определенной кривой.
Еще в одном аспекте приложенная сила является силой звукового излучения. Абляция в точке абляции включает в себя серию циклов мониторинга/терапии. Этой серии предшествует толчок. Начальная величина смещения возникает в ответ на толчок. Кроме того, по толчку определяется местоположение, в котором возникает начальная величина смещения. До серии циклов мониторинга/терапии устанавливается в нужном направлении фокус терапии на основе обнаруженного местоположения и заданного местоположения, совмещенного с точкой абляции.
В варианте реализации, основанном на упомянутом выше аспекте, начальная величина смещения является величиной максимального пространственного смещения.
В альтернативном аспекте мониторинг, регистрация и прекращение выполняются автоматически и не требуют вмешательства пользователя.
В конкретном варианте этого последнего аспекта эти этапы повторяются автоматически, не требуя вмешательства пользователя, для продвижения шаг за шагом к другой точке абляции. Результирующие точки абляции располагаются в заданной, представляющей интерес зоне, и образуют матрицу точек абляции, которые обеспечивают покрытие интересующей зоны.
В соответствии с этими и другими аспектами настоящего изобретения возможно более глубокое управление дозированием для предотвращения недостаточной или избыточной дозировки ткани. Обеспечивается удобная и экономичная реализация полностью ультразвукового подхода, предоставляющего возможность более широкого использования этого типа лечения в США и на развивающихся рынках.
Подробности новаторского управления абляцией излагаются далее с помощью перечисленных ниже чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
ФИГ.1 - иллюстративная функциональная блок-схема системы согласно настоящему изобретению;
ФИГ.2 - один тип предлагаемой схемы синхронизации сигналов согласно настоящему изобретению;
ФИГ.3 - пример графика, иллюстрирующего способ, посредством которого фокус терапии может быть направлен в целевую точку абляции в соответствии с настоящим изобретением;
ФИГ.4 - один пример графика типового смещения во времени и квадратической кривой, вписанной в начальный участок графика для обнаружения пикового значения, в соответствии с настоящим изобретением;
ФИГ.5 - иллюстративный график нормированного смещения во времени согласно настоящему изобретению;
ФИГ.6 - пример графика зависимости диаметра поражения от нормированной разности смещений согласно настоящему изобретению;
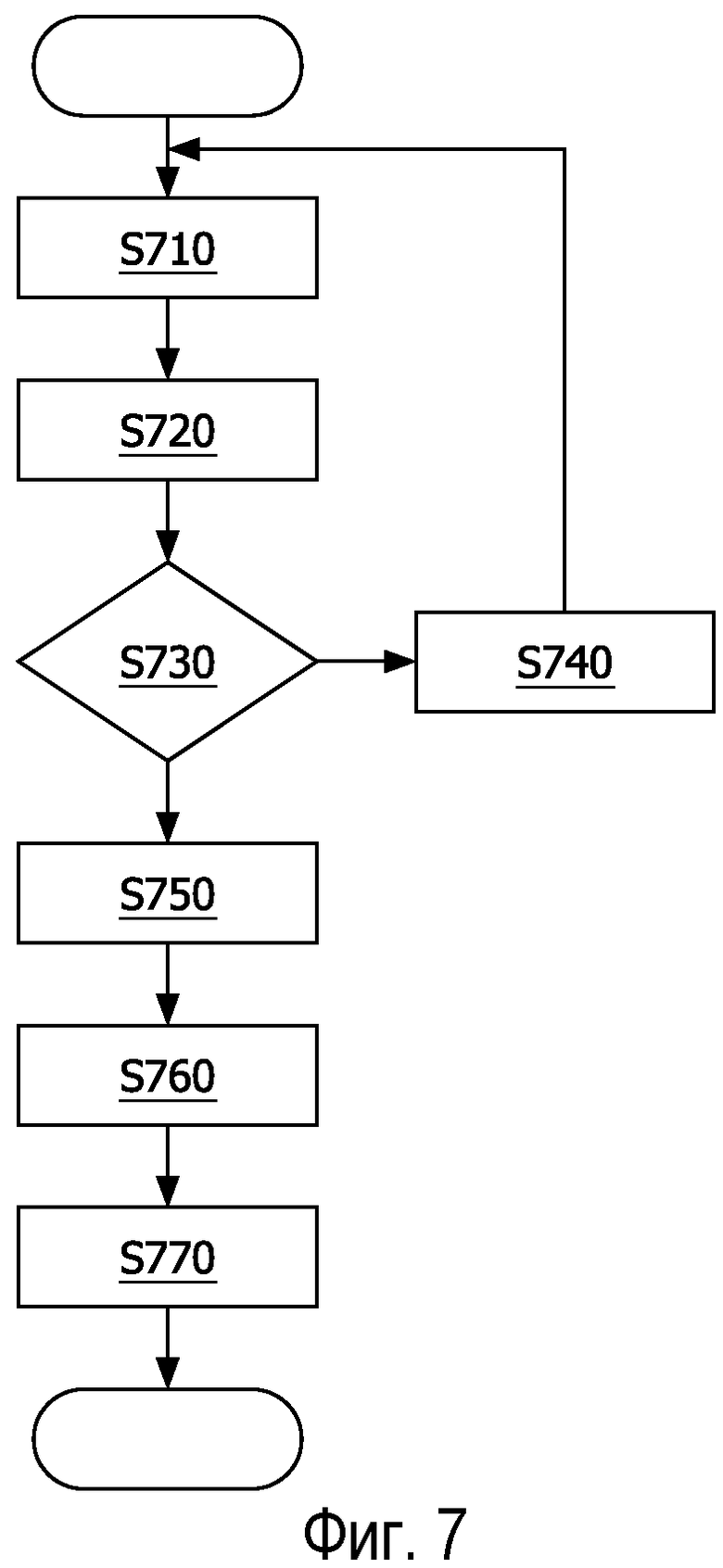
ФИГ.7 - блок-схема последовательности операций подготовки и инициализации устройства управления абляцией согласно настоящему изобретению;
ФИГ.8 - блок-схема, иллюстрирующая типовую работу аппарата абляционной терапии, в которой перемещение от точки к точке может осуществляться врачом-клиницистом или автоматически, согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ РЕАЛИЗАЦИИ
На фиг. 1 изображена в качестве иллюстративного и неограничивающего примера функциональная блок-схема аппарата 100 для абляции, содержащего, как показано в верхней части фиг. 1, терапевтическую секцию 105 и устройство 110 управления абляцией.
Как более подробно показано в нижней части, устройство 110 управления абляцией включает в себя секцию 115 мониторинга и секцию 120 управления.
Терапевтическая секция 105 имеет высокоинтенсивный фокусируемый ультразвуковой (HIFU) преобразователь 125, подсоединенный к радиочастотному (RF) усилителю посредством согласующей схемы 135.
Секция 115 мониторинга включает в себя преобразователь 140 изображений, подсоединенный к импульсному генератору 145 и приемнику 150 посредством переключателя 155 передачи/приема (T/R).
Секция 120 управления содержит генератор сигналов произвольной формы (AWG) и триггер 160, цифровой кодер 165 и процессор 170. Процессор 170 включает в себя графический интерфейс пользователя (GUI) 175, задающий генератор 180 сигналов и контроллер 185 перемещений для управления позиционированием стола для обследования и преобразователями 125, 140. Преобразователи размещены в зонде, который должен накладываться на пациента под управлением компьютера или вручную. Альтернативно зонд может располагаться на конце гибкого вала, чтобы вводиться внутрь через рот пациента под анестезией.
HIFU преобразователь 125 фокусирует ультразвук (который обладает радиочастотной или "RF" энергией), чтобы тем самым подвергать абляции опухоль или другую цель абляции. HIFU преобразователь 125 управляется сигналом, который усиливается радиочастотным (RF) усилителем 130. Усиленный сигнал проходит через согласующую схему 135, согласующую импедансы преобразователя 125 и усилителя 130. Хотя согласующая схема 135 обеспечена только в терапевтической секции 105, близость импедансов соседних компонентов может служить основанием для использования согласующей схемы также или вместо этого в секции 115 управления, или же может позволить не использовать согласующую схему ни в одной из этих секций.
HIFU преобразователь 125 также подает ультразвуковое излучение в форме толчка для получения изображения под действием силы звукового излучения (ARFI) и принимает обратно эхо-сигналы от объекта абляции. Термин "объект абляции" относится далее к пациенту, подвергаемому терапии, который является человеком или животным, или к любой ткани организма, как, например, во время проведения тестирования.
Преобразователь 140 изображений излучает ультразвук для запроса расстояния, на которое ARFI толчок сместил ткань организма. Излученный ультразвук может быть также использован для оценки размера опухоли, подлежащей обработке. Хотя изобретение не ограничивается отдельными преобразователями для выполнения толчка и получения изображения, отдельные преобразователи для двух этих функций позволяют отслеживать результаты толчка сразу же после толчка, позволяя тем самым получить более точные результаты.
Импульсный генератор 145 управляет работой преобразователя 140 изображений, заставляя этот преобразователь излучать ультразвук в направлении объекта абляции. Приемник 150 принимает обратно RF данные, поступающие от объекта абляции. Переключатель 155 передачи/приема (T/R) обеспечивает переключение двух этих режимов работы.
AWG и триггер 160 выдает сигналы для управления передачей ультразвука и приема RF данных, отраженных обратно. AWG может быть коммутируемым, чтобы обеспечивать конкретный моментальный снимок во время циклов сердечных сокращений и/или дыхания в зависимости от расположения в живом организме места абляции, подлежащего абляции.
Цифровой кодер 165 собирает приходящие RF данные и доставляет их в GUI 170.
GUI 170 обрабатывает RF данные. Он также создает изображения для воспроизведения их на мониторе и для обработки с целью извлечения данных смещения. C GUI 170 и монитором связано средство ввода/вывода пользовательского интерфейса, которое может включать в себя клавиши, наборные диски, движки, шаровые манипуляторы, сенсорные экраны, курсоры и любые другие известные и подходящие исполнительные элементы.
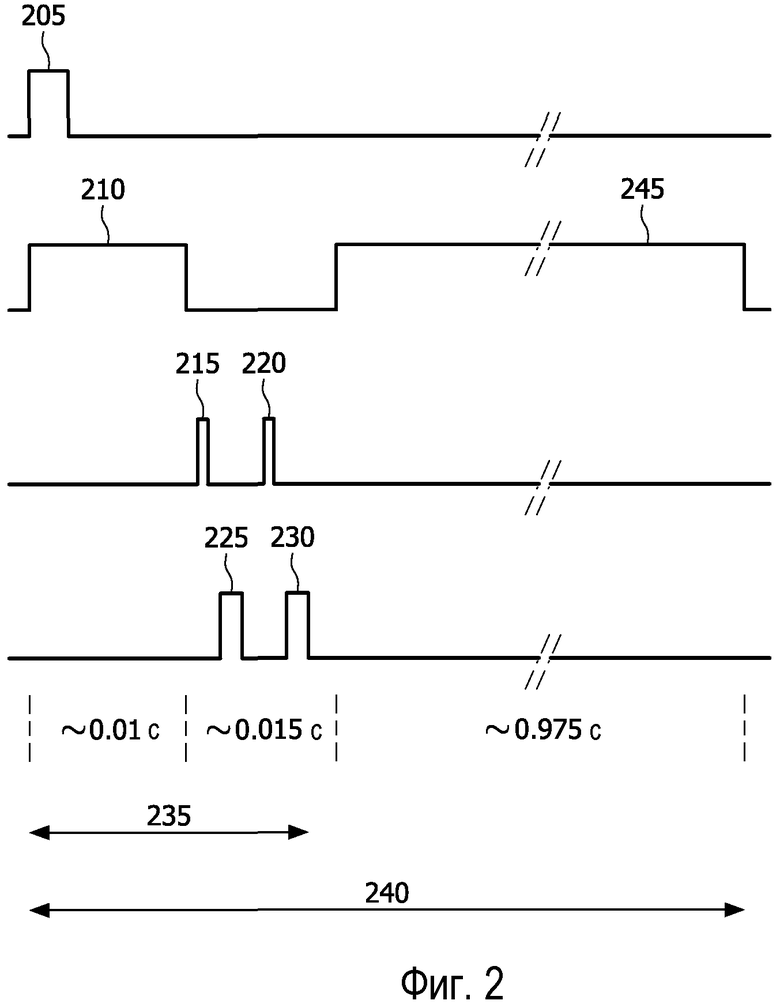
На фиг. 2 показана одна схема для синхронизации толчкового, отслеживающего и терапевтического импульсов в устройстве 110 управления абляцией. В показанном иллюстративном варианте реализации главный запускающий сигнал 205 сопровождается сигналом толчка 210 от HIFU преобразователя 125. Продолжительность толчка устанавливается равной от 10 до 15 миллисекунд (мс) в зависимости от механических свойств ткани, подвергаемой абляции. За сигналом толчка 210 следуют два импульса 215, 220 слежения, испускаемых преобразователем 140 изображений. Импульсы 215, 220 слежения являются импульсами А-режима, то есть они вырабатываются одним преобразователем, а не решеткой преобразователей, и используются для восприятия структур на разных глубинах вдоль линии А в ткани организма. Импульс 215 слежения подается немедленно за толчком 210, чтобы запросить значение в напряженном состоянии ткани. Импульс 220 слежения подается около 12 мс позже и представляет значение в расслабленном (или равновесном) состоянии ткани. Цифровой кодер 16 регистрирует соответствующие отраженные эхо-сигналы 225, 230 для этих двух импульсов 215, 220 слежения, следующие непосредственно за каждым из этих двух импульсов. Разность между RF данными, выведенная из этих двух отраженных эхо-сигналов 225, 230, представляет смещение ткани организма, полученное в ответ на толчок 210. Вся эта последовательность является участком 235 мониторинга в цикле 240 мониторинга/терапии и продолжается от 20 до 30 мс. Участок 245 терапии, во время которого HIFU преобразователь 125 обеспечивает терапию, намного длиннее и продолжается от 970 до 980 мс. Продолжительность всего цикла 240 мониторинга/терапии составляет около 1 секунды, то есть 1 с.
Другие возможные временные последовательности могут быть использованы вместо изображенной на фиг. 2, например, такая, в которой первый из двух импульсов слежения предшествует толчку, а второй импульс слежения подается после толчка. Как и на фиг. 2, пространственное положение, выявленное в результате первого импульса слежения, сравнивается с пространственным положением, выявленным в результате второго импульса слежения, чтобы получить смещение, являющееся результатом толчка. В качестве дополнительного примера мониторинг может осуществляться одновременно с толчком. Кроме того, вызванное смещение может быть колебательным с изображением гармонических колебаний (HMI).
Вследствие сфокусированного характера ультразвукового луча, прилагаемого при толчке 210, смещение является максимальным в фокусе. Однако смещение меньшей величины происходит в осевом и радиальном направлениях от фокуса. На величину смещения влияет с течением времени тепло, создаваемое терапевтическим ультразвуковым лучом от HIFU преобразователя 125.
Чтобы извлечь пользу от большего и более заметного смещения и обеспечить единообразие при измерении от одной точки абляции до другой точки абляции, желательно фокусировать луч, создающий толчок 210, в фокусе терапевтического ультразвукового луча (или в "терапевтическом фокусе"), с тем чтобы два фокуса совпадали. Два луча исходят от одного и того же HIFU преобразователя 125. Хотя терапевтический луч обладает большей мощностью, чем луч толчка, два луча совместно используют одни и те же параметры фокусировки и один и тот же фокус (или "фокальную точку").
Импульсы 215, 220 слежения исходят от отдельного преобразователя, отличающегося от того, который создает толчковый/терапевтический фокус; однако два преобразователя 125, 140 предпочтительно выполняются с возможностью фиксированного пространственного соотношения и общего фокуса.
Чтобы выровнять терапевтический фокус с целевой тканью организма, используется визуализация в А-режиме для воспроизведения на экране зоны обработки до начала обработки.
Врач-клиницист может локализовать (то есть определить для системы положение) предстающую точку абляции, указав (с помощью сенсорного экрана) или наведя (манипулируя мышью) на соответствующую точку на экране.
Основываясь на такой локализации, могут быть отрегулированы параметры терапевтического фокуса, чтобы приблизиться к заданному местоположению.
Однако неопределенности акустических и тепловых свойств ткани вследствие гетерогенности могут повлиять на местоположение толчка и терапии. Следовательно, несмотря на регулировку параметров, толчок может действительно происходить в том месте, которое до некоторой степени отличается от того местоположения, которое указал врач-клиницист.
Поэтому для того, чтобы более точно сфокусироваться на желаемом местоположении, делается дополнительный шаг после регулировки параметров. Говоря конкретно, терапевтический фокус направляется в заданное местоположение исходя из данных смещения, полученных по цепи обратной связи, в соответствии с аспектом настоящего изобретения, как обсуждается более подробно со ссылкой на фиг. 3.
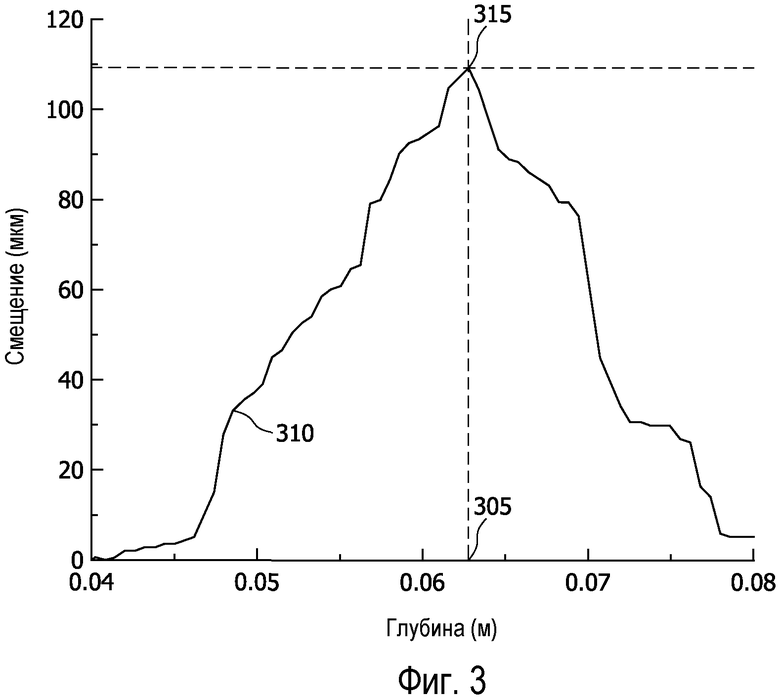
На фиг. 3 представлен способ, посредством которого терапевтический фокус 305 может быть точно расположен для последующего выравнивания с целевой точкой абляции. График на фиг. 3 представляет смещение 310 вдоль А-линии. Термин "начальное смещение" 315 относится к максимуму всех смещений 310 вдоль А-линии, являющихся результатом толчка 210 в предварительном цикле. Кроме того, поскольку изображенная А-линия выровнена относительно толчкового луча, местоположение начального смещения 315 является не только местоположением максимального пространственного смещения вдоль А-линии, но и оценкой максимального пространственного смещения в трехмерном пространстве. Так как толчковый и терапевтический лучи являются конфокальными, терапевтический фокус 305 совпадает с местоположением начального смещения 315. Все что остается теперь сделать слежению, знающему местоположение начального смещения 315, то есть терапевтического фокуса 305, это выровнять терапевтический фокус с тем местоположением, которое врач-клиницист указал на экране. Это указанное местоположение является местоположением желаемой точки предстоящей абляции. При выполнении выравнивания определение врача-клинициста, основанное на воспроизводимом на экране изображении, подкрепленном посредством преобразователя 140 изображений, согласуется с RF данными 225, 230, которые возвращаются как результат импульсов 215, 210 слежения, исходящих из того же преобразователя.
Возвращаясь назад к толчку 210 в предварительном цикле, который запустил выравнивание, предварительный цикл предшествует циклам 240 мониторинга/терапии и не должен требовать терапевтического участка. Цель толчка 210 в предварительном цикле, как обсуждалось выше, заключается в том, чтобы определить глубину в ткани организма, на которой происходит начальное смещение 315 и которая составляет около 63 мм в настоящем примере, и тем самым определить местоположение терапевтического фокуса 305. После того как будет определено местоположение терапевтического фокуса 305, он может быть выровнен с местоположением, заданным на экране, которое является желаемой точкой предстоящей абляции. Устройство 110 управления абляцией обеспечивает автоматическое выполнение этого выравнивания до начала следующего цикла, который является первым из циклов 240 мониторинга/терапии. Назначение предварительного цикла, отдельного от циклов 240 мониторинга/терапии, будет обсуждено более подробно ниже в связи с фиг. 5.
На фиг. 4 представлен пример графика типового смещения во времени с квадратической кривой, наложенной на начальный участок графика для обнаружения пика. Цикл под номером ноль на графике относится к запуску циклов 240 мониторинга/терапии и происходит после предварительного цикла. В примере на фиг. 4 исходное смещение 405 показано равным около 110 мкм. Исходное смещение 405 изменяется от одной точки абляции к другой точки абляции, от индивидуума к индивидууму и от образца ткани к образцу ткани вследствие неоднородности ткани организма. С течением времени, с каждым последующим циклом 240 мониторинга/терапии осуществляется воздействие терапии на смещение 410 ткани в терапевтическом фокусе 305. Смещение 410 сначала возрастает во времени благодаря приложенному теплу, размягчающему ткань. По истечении некоторого времени проведения терапии смещение 410 достигает пика 415 и начинает уменьшаться, указывая на то, что ткань становится жестче (то есть на некроз). Уменьшение наблюдается до тех пор, пока терапия не достигнет точки остановки смещений 410 или "конечного смещения" 420. После того как терапия прекращается, смещение 410 медленно уменьшается по мере того, как ткань охлаждается. Однако влияние температуры на некроз клеток все еще существует. Используемое здесь выражение "прекращение абляции ткани организма" определяется как прекращение приложения к ткани организма посредством аппарата для абляции энергии, изменяющей ее механические свойства.
Квадратическая кривая 425 может быть построена на графике смещений 410 в реальном времени для обнаружения пика 415. Пик 415 обнаруживается, когда наклон квадратической кривой 425 становится равным нулю и начинает становиться отрицательным. Пик 415 может быть оценен усреднением измеренных значений смещения 410, например по пяти циклам, в пределах интервала вокруг точки с нулевым наклоном. Причина обнаружения пика 415 будет обсуждаться более подробно в связи с фиг. 5.
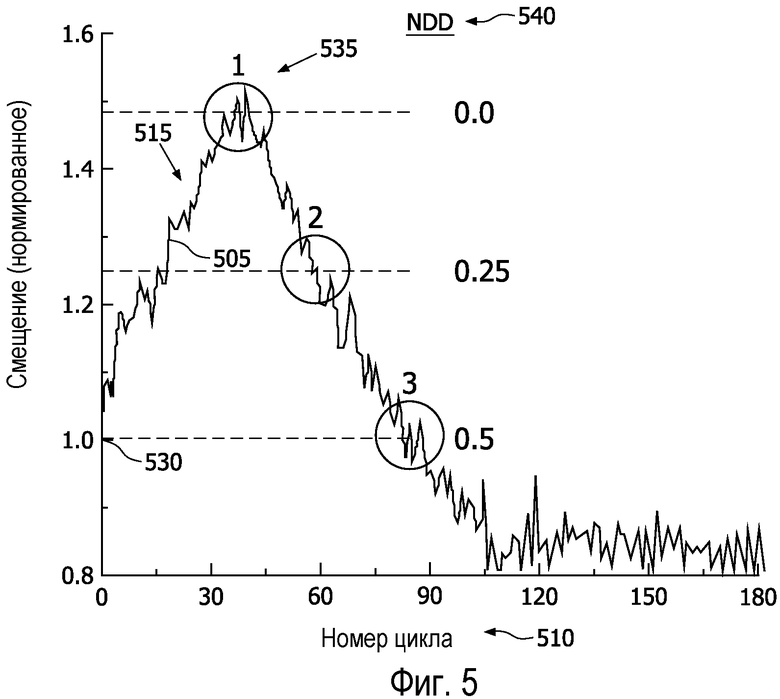
На фиг. 5 представлен иллюстративный график нормированного смещения 505 во времени или, более конкретно, соответственно циклу номер 510. График на фиг. 5, именуемый в дальнейшем характеристической кривой 515, может быть выведен из графика смещений на фиг. 4 делением каждого смещения 410 на исходное смещение 405. Характеристическая кривая 515 может быть также сочетанием, таким как усреднение, ряда таких выведенных кривых, основанных на эмпирическом наблюдении в разных точках абляции. Вследствие упомянутой выше неоднородности ткани организма шкала времени (цикла с номером 510) на фиг. 5 может сокращаться или расширяться в зависимости от точки абляции, индивидуума или образца ткани. Таким образом, скорость изменения во времени нормированного смещения является переменной. Однако форма характеристической кривой 515 остается постоянной для данного типа ткани организма, например печенки, груди, сердца. Подразумевается, что когда точка на характеристической кривой 515 определена, то определены все точки. Это важно, потому что некоторые из точек на характеристической кривой 515 связаны с конкретными размерами поражения. Таким образом, возможность определения того, что происходящая абляция в точке абляции достигла конкретной точки на характеристической кривой 515, может привести в результате к точному предсказанию относительно того, когда прекратить абляцию для достижения желаемого размера поражения. Слово "характеристическая" в используемом здесь термине "характеристическая кривая", относится к характерному признаку или свойству. Характерный признак или свойство может принадлежать ткани организма.
Во время текущей абляции значения смещений 410 до нормирования доступны в реальном времени. Способ в соответствии с настоящим изобретением заключается в регистрации одного или более смещений 410 в соответствующее нормированное смещение (смещения) 505 на характеристической кривой 515.
Двумя опознавательными точками на характеристической кривой 515 является точка нормированного исходного смещения 530, которое условно считается равным единице, и точка нормированного пикового смещения 535.
Связанные с ними смещения до нормирования являются, соответственно, исходным смещением 405 и пиковым смещением 415.
Исходному смещению 405 непосредственно предшествует предварительный цикл. Как было дополнительно упомянуто выше, предварительный цикл не должен обязательно иметь терапевтического участка. Фактически предпочтительно, чтобы он не имел его. Это объясняется тем, что вследствие неоднородности ткани организма нагревание во время него в течение примерно одной секунды не приведет в результате к надежной величине смещения при начале циклов 240 мониторинга/терапии. Надежная величина смещения 410 желательна во время такого начала, для того чтобы использовать эту величину смещения как основу для предсказания того, когда прекратить абляцию в текущей точке абляции. То есть, поскольку к моменту начала произошло выравнивание на текущую точку абляции, предсказание соответствующим образом основывается на данных, полученных от текущей точки абляции. Более того, если в предварительном цикле опускается терапевтический участок 245, то устраняется упомянутый выше эффект неоднородности. Следовательно, на величину смещения в первом из циклов мониторинга/терапии, то есть на исходное смещение 405, можно полагаться согласно настоящему изобретению в предсказании точки остановки абляции применительно к текущей точки абляции. Более конкретно, исходное смещение 405 может быть зарегистрировано для исходного нормированного смещения 530. Регистрация позволяет посредством характеристической кривой 515 использовать исходное смещение 405 в предсказании того, когда, исходя из смещения, следует прекратить абляцию для достижения заданного размера поражения при таком прекращении. Исходное смещение 405 является соответственно одной из величин, которые могут служить в качестве того, что в дальнейшем называется независимой регистрационной точкой темпа выполнения терапии (TPRI).
Пиковое смещение 415 происходит одновременно с нормированным пиковым смещением 535. Соответственно пиковое смещение 415 может, подобно исходному смещению 405, служить в качестве TPRI регистрационной точки.
Для того чтобы быть эффективной в качестве средства предсказания размера поражения, регистрация TPRI регистрационной точки с помощью характеристической кривой 515 основывается на функциональном соотношении между декрементами нормированного смещения 505 и эмпирическими значениями размера поражения. С этой целью нормированная разность смещений (NDD) 540 определяется как разность между нормированным пиковым смещением 535 и нормированным конечным смещением 505. Значения 0, 0,25 и 0,5 для NDD 540 показаны на фиг. 5. Таким образом, когда, например, NDD равна 0, нормированное пиковое смещение 535 и нормированное конечное смещение 505 одинаковы, что должно означать, что приложение абляционной энергии прекращено при пиковом смещении 415 (или, что то же самое, при нормированном пиковом смещении 535). Конкретный размер поражения связан с каждым значением NDD 540.
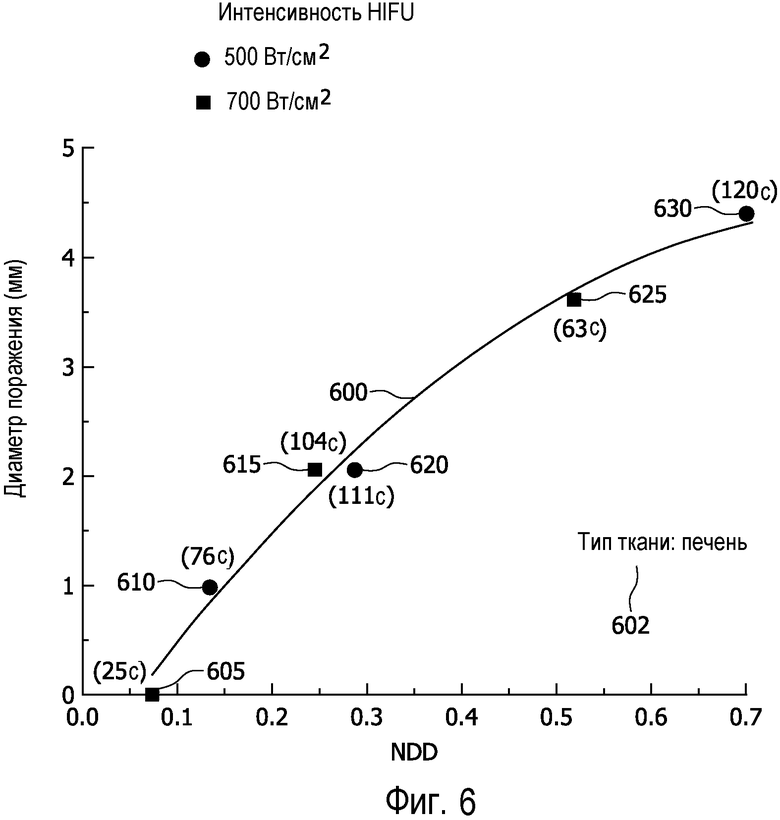
На фиг. 6 приведен пример графика 600 зависимости диаметра поражения от NDD 540. Абляция проводилась экспериментально на разных образцах ткани и в разных местах внутри образца. Абляция была прекращена, и образец был немедленно охлажден, чтобы остановить некроз. Был измерен размер поражения. Форма поражения зависит от геометрии преобразователя и от характеристик звукового луча. В случае HIFU поражение обычно имеет эллипсоидную форму с главной осью вдоль продольной оси луча. Диаметр поражения на фиг. 6 соответственно относится к максимальному диаметру поражения, перпендикулярному к продольной оси луча. Для каждого измерения записывались время обработки, величина конечного смещения 420 и величина пикового смещения 415. Основываясь на этих действительных данных, на график были нанесены точки наблюдения, относящие диаметр поражения к NDD 540. На фиг. 6 показаны некоторые нанесенные на график точки наблюдения для типа 602 ткани, которая в данном случае является печенью. Было установлено, что соотношение описывается полиномом второго порядка с хорошей степенью соответствия и что параметры полинома зависят от типа ткани. Параметры будут также зависеть от формы поражения, хотя форма поражения обычно не должна изменяться. Поэтому в дальнейшем полагается, что когда кривая классифицируется типом ткани, отсутствует необходимость дополнительной классификации по форме поражения. Как обозначено разными интенсивностями HIFU в точках наблюдения 605-630, построенная по точкам функция инвариантна по отношению к интенсивности обработки. Время обработки (в секундах) для шести образцов указано в скобках. Можно увидеть, что время обработки не является хорошим индикатором размера поражения вследствие неоднородности ткани. Например, точка наблюдения 615 указывает большее время обработки для достижения меньшего размера поражения по сравнению с точкой наблюдения 625. Для наблюдений, произведенных в разных частях одного и того же образца ткани или в разных образцах ткани, было обнаружено, что размеры поражения не соотносятся хорошо со временем обработки. Успехом является то, что методология настоящего изобретения, изложенная выше и более подробно ниже, преодолевает чувствительность к неоднородности ткани.
На фиг. 7 приведен пример подготовки и инициализации устройства 110 управления абляцией. Абляция выполняется на конкретном образце ткани (этап S710). Абляция завершается для конкретного образца ткани, который немедленно охлаждается, чтобы остановить некроз. Конечное смещение 420 и пиковое смещение 412 регистрируются. После гистологического обследования образованного поражения записывается размер поражения (этап S720). Затем выясняется, является ли это последним наблюдением (этап S730). Если это не последнее наблюдение, выполняется следующее наблюдение на текущем образце ткани или на другом образце ткани, или на другом типе ткани (этап S740). С другой стороны, если это последнее наблюдение, наблюдения группируются по типу ткани (этап S750). Построенные по точкам кривые (или "калибровочные кривые") выводятся для типа ткани, используя зарегистрированные данные и вычерчивание по точкам квадратической кривой. Калибровочные кривые 600, каждая со своим идентификатором типа 602 ткани, посылаются в устройство 110 управления абляцией. Каждая характеристическая кривая 515, идентифицированная типом ткани, также становится доступной для устройства 110 управления абляцией. Характеристические кривые 515 выводятся подобным образом из эмпирических наблюдений, как было упомянуто выше (этап S770).
На фиг. 8 иллюстрируется типовой порядок работы аппарата 100 для абляции, в котором перемещение от точки к точке осуществляется врачом-клиницистом или автоматически. При начале абляционной процедуры ультразвуковой зонд располагается вблизи объекта абляции и приводится в действие. Воспроизведение изображений на экране в А-режиме (то есть основанное на сканировании одним преобразователем), которое может быть объединено для воспроизведения как сканирование в М-режиме (решеткой преобразователей, обеспечивающих возможность многомерного перемещения при воспроизведении), используется врачом-клиницистом для определения границ предстоящей абляции посредством указания или поиска на экране (этап S805). Врач-клиницист вводит тип ткани и желательный размер поражения, который затем оценивается по соответствующей калибровочной кривой 600, чтобы получить NDD 540 (этап S810). Порядок следования этапов S805 и S810 может быть изменен на обратный или распределен. Хотя желаемый размер поражения еще не требует вычисления по формуле (1) (приводимой ниже), обычно врачу-клиницисту следует определить желаемый размер поражения до начала абляции в точке абляции. Затем врач-клиницист указывает на экране текущую точку абляции (этап S815). На этапе S820 инициируется процесс абляции в текущей точки абляции, начинается мониторинг возбуждаемых толчком смещений и достигается одна или более TPRI регистрационных точек в реальном времени, и осуществляется их обработка в реальном времени. Процесс обработки включает в себя регистрацию точки (точек) (например, исходного смещения 405, пикового смещения 415) в соответствующую точку (точки) (то есть нормированное исходное смещение 530, нормированное пиковое смещение 535) на соответствующей характеристической кривой. Может быть использована следующая формула:
HD=(NPD-NDD)×RP/CP,
где
HD - смещение, при котором должна быть прекращена абляция;
RP - TPR1 регистрационная точка;
CP - соответствующая точка на характеристической (то есть нормированной) кривой 515;
NPD - нормированное пиковое значение 535, и
NDD - нормированная разность 540 смещений.
Таким образом, определение HD, то есть конечного смещения 420, активируется регистрацией TPRI регистрационной точки (точек) с помощью характеристической кривой 515. Поэтому, например, если исходное смещение 405 служит в качестве TPRI регистрационной точки, активация производится по выполнении участка 235 мониторинга первого из циклов 240 мониторинга/терапии. До этого выполнения исходное смещение 405 еще не известно и поэтому не может быть применено как RP в приведенной выше формуле (1).
Отношение RP/CP в формуле (1) может рассматриваться как коэффициент нормирования. Когда желаемый размер поражения оценивается по калибровочной кривой 600, определяется NDD 540. NDD 540 вычитается из NPD 535, чтобы получить нормированную форму конечного смещения 420. Эта нормированная величина умножается на коэффициент нормирования, чтобы получить "денормированное" конечное смещение (или HD в формуле (1)). Если используются более одной регистрационных точек, соответствующие коэффициенты нормирования могут быть усреднены для использования в уравнении (1).
Как было установлено выше, одним из представляющих интерес признаков согласно настоящему изобретению является регистрация с помощью характеристической кривой 515 во время абляционной процедуры в текущей точке абляции для определения конечного смещения 420. Другим представляющим интерес признаком согласно аспекту настоящего изобретения является то, что определение конечной величины 420 смещения, мониторинг которого осуществляют, включает в себя оценку по гистологически определенной кривой 600.
Абляция прекращается, когда обнаруживается конечное смещение 420 (этап S825). Если это последняя точка абляции (этап S830), процедура завершена, и матрица точек абляции вокруг текущей точки абляции обеспечивает покрытие всей представляющей интерес зоны, то есть опухоли или другой целевой зоны, подлежащей абляции (этап S835). В противном случае, если это не последняя точка абляции (этап S830), следующий этап зависит от того, будет ли следующая точка абляции выбираться вручную или автоматически. Если выбор будет производиться автоматически, следующая точка абляции служит текущей точкой абляции (этап S845), и процесс обработки возвращается к этапу S820, при этом обработка точки за точкой выполняется автоматически, не требуя вмешательства пользователя. Если же, с другой стороны, выбор производится вручную, следующая точка абляции служит текущей точкой абляции (этап S850), и процесс обработки возвращается к этапу S815.
Систематический способ прекращения в реальном времени абляции ткани организма в текущей точке абляции для достижения заданного размера поражения при прекращении включает в себя регистрацию с помощью характеристической кривой 515 одного или более значений и прекращение абляции на основе такой регистрации. Значение или значения получаются путем мониторинга в текущей точке абляции смещения 410, вызванного силой, приложенной к ткани организма. В одном варианте реализации прекращение осуществляется при обнаружении, полученном посредством мониторинга и после возникновения пикового значения 415 смещения, мониторинг которого осуществляют, конечного значения 420 смещения, мониторинг которого осуществляют. В другом варианте реализации конечное значение 420 определяется до такого обнаружения, и определение осуществляется регистрацией.
В соответствии с настоящим изобретением предлагается точный, быстрый, недорогой и удобный способ для прекращения абляции ткани организма в точке абляции. Обеспечивается удобная и экономичная, полностью ультразвуковая реализация, предоставляющая возможность намного более широкого использования этого типа лечения в США и на развивающихся рынках.
HIFU, являясь ультразвуковым способом, позволяет реализовать недорогой, полностью ультразвуковой аппарат абляционной терапии, обладающий изложенными выше признаками. Тем не менее, любая другая форма абляционной терапии, которая заставляет ткань организма подвергаться изменению механических свойств подобным способом, таким как нагревание (например, радиочастотная (RF) абляция, высокоинтенсивная фокусируемая ультразвуковая (HIFU) абляция, микроволновая, лазерная абляция), замораживание (например, криогенная абляция) или химическое воздействие, укладывается в заданный объем настоящего изобретения.
Настоящее изобретение не ограничивается абляцией опухолей. Например, ослабление сердечной аритмии может достигаться некрозированием конкретной линии сердечной ткани, чтобы тем самым заблокировать аномальный электрический путь через сердце. Такой способ может быть осуществлен, используя способы абляции согласно настоящему изобретению.
Более того, хотя методология настоящего изобретения может быть успешно применена для обеспечения медицинского лечения, объем изобретения этим не ограничивается. Более широко способы согласно настоящему изобретению направлены на размещение и управление размером поражений в ткани организма, in vivo, in vitro или ex vivo.
Следует отметить, что упомянутые варианты реализации скорее иллюстрируют, чем ограничивают изобретение, и что специалисты в данной области техники смогут разработать многие альтернативные варианты реализации, не выходя за объем прилагаемых пунктов формулы изобретения. Например, HIFU преобразователь 125 может быть реализован в виде решетки преобразователей с отдельными апертурами для толчков и терапии. В качестве другого примера HIFU преобразователь 125 и преобразователь 140 изображений могут быть заменены двухрежимным преобразователем как для визуализации, так и для терапии. В пунктах формулы изобретения любые ссылочные позиции, заключенные в скобки, не могут рассматриваться как ограничивающие пункт. Использование глагола "содержит" и его сопряжений не исключает наличие элементов или этапов, отличающихся от заявленных в пункте формулы изобретения. Указание на единственность, стоящее перед элементом, не исключает наличия множества таких элементов. Изобретение может быть реализовано посредством аппаратного оборудования, содержащего некоторые четко выраженные элементы, и посредством надлежаще запрограммированного компьютера, имеющего машиночитаемый носитель. Простой факт, что определенные показатели приведены во взаимно отличающихся зависимых пунктах формулы изобретения, не означает, что сочетание этих показателей не может быть успешно использовано.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНИТОРИНГ И УПРАВЛЕНИЕ HIFU ТЕРАПИЕЙ В РЕАЛЬНОМ ВРЕМЕНИ ВО МНОЖЕСТВЕ ИЗМЕРЕНИЙ | 2011 |
|
RU2579737C2 |
| ТЕРАПИЯ ПОД УПРАВЛЕНИЕМ МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ | 2010 |
|
RU2538238C2 |
| Способ предотвращения повреждения акустического блока устройства для комплексной диагностики и терапии отраженным излучением HIFU | 2022 |
|
RU2806736C1 |
| МУЛЬТИФОКУСНЫЕ СОНИКАЦИИ ДЛЯ ГИПЕРТЕРМИЧЕСКИХ ЛЕЧЕБНЫХ ВОЗДЕЙСТВИЙ С ИСПОЛЬЗОВАНИЕМ УЛЬТРАЗВУКА, СФОКУСИРОВАННОГО ПОД КОНТРОЛЕМ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2013 |
|
RU2650598C2 |
| КАЛИБРОВКА УЛЬТРАЗВУКОВОГО, ОСНОВАННОГО НА ЭЛАСТИЧНОСТИ, ОТОБРАЖЕНИЯ ГРАНИЦЫ ОЧАГА ПОРАЖЕНИЯ | 2016 |
|
RU2702090C2 |
| ЭНЕРГЕТИЧЕСКАЯ МОДУЛЯЦИЯ НЕРВОВ | 2010 |
|
RU2523129C2 |
| ТЕРАПЕВТИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫДЕЛЕНИЯ ЭНЕРГИИ | 2009 |
|
RU2518524C2 |
| КАТЕТЕР, СОДЕРЖАЩИЙ ЕМКОСТНЫЕ МИКРОМАШИННЫЕ УЛЬТРАЗВУКОВЫЕ ПРЕОБРАЗОВАТЕЛИ, С РЕГУЛИРУЕМЫМ ФОКУСОМ | 2011 |
|
RU2594429C2 |
| СФОКУСИРОВАННЫЙ УЛЬТРАЗВУК ВЫСОКОЙ ИНТЕНСИВНОСТИ ДЛЯ НАГРЕВА ЦЕЛЕВОЙ ЗОНЫ, БОЛЬШЕЙ, ЧЕМ ЭЛЕКТРОННАЯ ЗОНА ФОКУСИРОВКИ | 2013 |
|
RU2635481C2 |
| СИСТЕМА И СПОСОБ АДАПТИВНОЙ АБЛЯЦИИ И ТЕРАПИИ НА ОСНОВАНИИ ЭЛАСТОГРАФИЧЕСКОГО МОНИТОРИНГА | 2016 |
|
RU2707037C2 |


Изобретение относится к медицинской технике, а именно к управлению абляцией. Устройство (110) управления абляцией содержит секцию (115) мониторинга и секцию (120) управления для регистрации (S820) с помощью характеристической кривой (515) одного или более значений смещения, полученных при мониторинге смещения, и прекращения, в реальном времени, абляции в точке абляции, когда достигается заданный размер поражения. Секция (120) управления дополнительно выполнена с возможностью прекращения абляции в точке абляции при обнаружении и после возникновения пикового значения смещения, конечного значения (420) смещения. Аппарат для абляции дополнительно включает терапевтическую секцию (105) для создания абляции в точке абляции и приложения силы. Способ работы с аппаратом включает мониторинг в реальном времени, применительно к текущей точке абляции, смещения в ответ на силу, приложенную к ткани организма, регистрацию с помощью характеристической кривой одного или более значений смещения и прекращение абляции ткани при достижении заданного размера поражения. Компьютерно-читаемый носитель реализует компьютерную программу, исполняемую процессором для выполнения действий способа. Использование изобретения позволяет повысить точность, скорость и удобство при проведении абляции. 4 н. и 16 з.п. ф-лы, 8 ил.

1. Устройство (110) управления абляцией, выполненное с возможностью прекращения абляции ткани организма в текущей точке абляции для достижения заданного размера поражения, содержащее:
секцию (115) мониторинга, выполненную с возможностью мониторинга в реальном времени, применительно к упомянутой текущей точке абляции, смещения в ответ на силу, приложенную к ткани организма; и
секцию (120) управления, выполненную с возможностью регистрации (S820) с помощью характеристической кривой (515) одного или более значений смещения, полученных с помощью упомянутого мониторинга упомянутого смещения, и прекращения, в реальном времени, упомянутой абляции в упомянутой точке абляции на основе упомянутой регистрации, когда достигается упомянутый заданный размер поражения, причем упомянутая секция (120) управления дополнительно выполнена с возможностью прекращения упомянутой абляции в упомянутой точке абляции при обнаружении посредством упомянутого мониторинга и после возникновения пикового значения смещения, мониторинг которого осуществляют, конечного значения (420) упомянутого смещения, мониторинг которого осуществляют.
2. Устройство управления абляцией по п.1, в котором упомянутая секция управления дополнительно выполнена с возможностью определения (S820) упомянутого конечного значения до упомянутого обнаружения, причем упомянутое определение упомянутого конечного значения осуществляется с помощью упомянутой регистрации одного или более значений смещения.
3. Устройство управления абляцией по п.1, в котором упомянутое определение упомянутого конечного значения осуществляется с помощью упомянутой регистрации (S820).
4. Устройство управления абляцией по п.3, в котором упомянутая абляция в упомянутой точке абляции выполняется в циклах (240) толкания/терапии, которые имеют участок (235) мониторинга и участок (245) терапии, причем активация происходит в результате первого из упомянутых циклов.
5. Устройство управления абляцией по п.4, в котором активация происходит после завершения упомянутого участка (235) мониторинга упомянутого первого цикла (S820).
6. Устройство управления абляцией по п.2, в котором упомянутое определение упомянутой конечной точки основано на гистологическом обследовании (S720) ткани организма.
7. Устройство управления абляцией по п.2, в котором секция управления выполнена с возможностью осуществления упомянутого определения посредством построения по точкам кривой (S760) для нормированных разностей (540) смещений применительно к соответствующим наблюдаемым размерам поражения, причем нормированная разность смещений для соответствующего одного из поражений, размер которого наблюдался, является разностью между нормированным пиковым смещением и нормированным конечным смещением, при этом конечное смещение, подвергаемое нормированию, происходит по времени после пикового смещения, подвергаемого нормированию.
8. Устройство управления абляцией по п.7, в котором скорость (510) изменения во времени упомянутого нормированного смещения изменяется в зависимости от местоположения соответствующей точки абляции, причем построенная по точкам кривая (600) изменяется в зависимости от типа (602) ткани организма и не зависит от интенсивности (605-630) абляции.
9. Устройство управления абляцией по п.7, в котором секция управления выполнена с возможностью осуществления упомянутого определения посредством оценки (S810) желаемого размера поражения по построенной по точкам кривой.
10. Устройство управления абляцией по п.7, в котором размеры упомянутых наблюдаемых поражений определены посредством гистологического обследования (S720).
11. Устройство управления абляцией по п.7, в котором построенная по точкам кривая является квадратической функцией (S760), используемой секцией управления.
12. Устройство управления абляцией по п.1, в котором упомянутая характеристическая кривая выводится из эмпирических наблюдений (S720), зарегистрированных устройством управления абляцией, и упомянутое определение конечного значения смещения, мониторинг которого осуществляют, дополнительно содержит оценку (S810) по гистологически определенной кривой (600).
13. Устройство управления абляцией по п.1, причем устройство управления абляцией выполнено с возможностью осуществления высокоинтенсивной фокусируемой ультразвуковой абляции (125).
14. Аппарат для абляции, содержащий:
устройство управления абляцией по п.1; и
терапевтическую секцию (105), выполненную с возможностью вызова упомянутой абляции в упомянутой точке абляции и приложения упомянутой силы, причем упомянутое устройство управления абляцией дополнительно выполнено с возможностью управления упомянутой терапевтической секцией.
15. Способ работы с аппаратом для абляции таким образом, чтобы прекратить абляцию ткани организма в текущей точке абляции, чтобы достигнуть заданного размера поражения, причем упомянутый способ содержит:
мониторинг (S820) в реальном времени, применительно к текущей точке абляции, смещения в ответ на силу, приложенную к ткани организма;
регистрацию (S820) с помощью характеристической кривой одного или более значений смещения, полученных посредством упомянутого мониторинга; и
прекращение (S825), на основе упомянутой регистрации, в реальном времени упомянутой абляции ткани организма в упомянутой точке абляции, при этом упомянутый заданный размер поражения достигается после упомянутого прекращения, причем прекращение упомянутой абляции в упомянутой точке абляции выполняют при обнаружении посредством упомянутого мониторинга и после возникновения пикового значения (415) смещения, мониторинг которого осуществляют, конечного значения (420) упомянутого смещения, мониторинг которого осуществляют.
16. Способ по п.15, в котором прилагаемая сила включает в себя силу (235) звукового излучения, причем упомянутая абляция в упомянутой точке абляции включает в себя множество циклов мониторинга/терапии, причем упомянутому множеству предшествует толчок (210), и причем величина (315) начального смещения возникает в ответ на упомянутый толчок, причем упомянутый способ дополнительно содержит:
обнаружение, из упомянутого толчка, местоположения (305), в котором возникает упомянутая величина начального смещения; и
выравнивание, до множества циклов мониторинга/терапии, терапевтического фокуса, причем упомянутое выравнивание основывается на обнаруженном местоположении и на заданном местоположении (S815), совпадающим с упомянутой точкой абляции.
17. Способ по п.16, в котором величина упомянутого начального смещения является величиной максимального пространственного смещения (315).
18. Способ по п.17, в котором упомянутый мониторинг, упомянутая регистрация и упомянутое прекращение выполняются автоматически, не требуя вмешательства пользователя (S845).
19. Способ по п.18, дополнительно содержащий повторение, осуществляемое автоматически и без вмешательства пользователя, упомянутого способа по п.18, продвижение, осуществляемое от повторения к повторению, в заданной представляющей интерес зоне вокруг упомянутой точки абляции, к другой точке абляции для заполнения матрицы точек абляции, которая обеспечивает покрытие упомянутой представляющей интерес зоны (S835).
20. Компьютерно-читаемый носитель для мониторинга абляции ткани организма в текущей точке абляции для достижения заданного размера поражения, реализующий компьютерную программу, которая включает в себя команды, исполняемые процессором для выполнения множества действий, при этом упомянутое множество содержит следующие действия:
мониторинг (S820) в реальном времени смещения, применительно к упомянутой текущей точке абляции, в ответ на силу, приложенную к ткани организма;
регистрацию (S820) с помощью характеристической кривой одной или более величин смещения, полученных посредством упомянутого мониторинга; и
на основе упомянутой регистрации прекращение (S825) в реальном времени упомянутой абляции ткани организма в упомянутой точке абляции, при этом упомянутый заданный размер поражения достигается после упомянутого прекращения,
причем упомянутое действие прекращения (S825) основано на обнаружении, посредством упомянутого мониторинга и после возникновения пикового значения смещения, мониторинг которого осуществляют, конечного значения (420) упомянутого смещения, мониторинг которого осуществляют.
| US2008097207 A1, 24.04.2008 | |||
| FREDERIC L.LIZZI et al | |||
| "Radiation-Force Technique to Monitor Lesions During Ultrasonic Therapy", Ultrasound in Med.& Biol., v.29, No 11, 2003, p.p.1593-1605 | |||
| US2008167555 A1, 10.07.2008 | |||
| US2005203399 A1, 15.09.2005 | |||
| US2007106157 A1, 10.05.2007 | |||
| СПОСОБ КОРРЕКЦИИ РЕФРАКЦИОННЫХ СВОЙСТВ РОГОВИЦЫ ГЛАЗА ПРИ IN SITU МОНИТОРИНГЕ МЕТОДОМ ОПТИЧЕСКОЙ КОГЕРЕНТНОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2183108C1 |

