Настоящее изобретение относится к области транспортных средств, более конкретно к электротранспортным средствам.
Известен электромобиль (FR 2757806 A1, B60L 15/20), содержащий источник питания силового блока электромотора, связанного с колесами транспортного средства (ТС). Недостатком известного устройства является отсутствие возможности раздельного управления скоростью и/или моментом колес ТС.
Известно автономное транспортное средство (RU 63297 U1, B60L 11/00), содержащее источник питания и инвертор, выход которого соединен с тяговыми электродвигателями переменного тока. Недостатком известного устройства является также отсутствие возможности раздельного управления скоростью и/или моментом колес ТС.
Наиболее близким по технической сущности к настоящему изобретению является «Электромобиль», раскрытый в RU 2048309 C1. Известное устройство содержит: комбинированный источник питания, коммутационную аппаратуру для выбора направления движения «вперед-назад», режима задне-, передне- или полноприводной; и педалей движения и тормоза, связанных с соответствующими реостатами, а также обратимые электроприводы передних и задних колес.
Для обеспечения одинаковых скоростей электроприводы передних и, соответственно, задних колес попарно соединены последовательно.
Недостатком известного устройства является отсутствие возможности раздельного управления величиной скорости и/или момента колес оси.
При повороте транспортного средства скорость всех четырех колес в общем случае разная, и чем меньше радиус поворота, тем больше разница скоростей. Кроме того, общий ток электродвигателей оси обуславливает одинаковый момент на колесах оси. Между тем, в общем случае момент сопротивления на колесах оси является разным и требуемый двигательный или тормозной момент на колесах оси также должен быть разным. Например, при попадании одного колеса оси на мокрый лед, а другого на сухой асфальт коэффициенты трения отличаются на разных колесах более чем на порядок, и первое колесо в известном решении будет вращаться с максимальной скоростью, а второе стоять - аналогично тому, как это имеет место в случае с механическим дифференциалом. Разная скорость колес при повороте ТС при одинаковом задании скорости приведет к различной загрузке двигателей. В то же время выбор величины задания скорости колеса очень важен. Если фактическая скорость колеса больше заданной, то привод переходит в тормозной (генераторный) режим и колесо начинает тормозить ТС - это может привести к потере устойчивости ТС.
Целью настоящего изобретения является повышение (улучшение) эксплуатационных характеристик электротранспортного средства, таких как маневренность, управляемость, устойчивость, экономичность регулирования, дальность пробега на одной зарядке аккумуляторных батарей.
Указанные цели достигаются электротранспортным средством, выполненным в соответствии с настоящим изобретением.
В соответствии с ним предлагается электротранспортное средство, связанное с внешним источником питания или содержащее автономный источник питания; рекуператор энергии; орган задания момента и скорости движения; орган задания момента торможения; переключатель выбора режима движения; два или четыре приводных электродвигателя, связанные соответственно с двумя или четырьмя колесами транспортного средства; два или четыре реверсивных преобразователя для регулирования момента приводных электродвигателей и снабженное датчиком поворота руля и системой управления верхнего уровня (СУВУ), причем указанные органы задания и переключатель выбора режима движения вместе с датчиком поворота руля подключены ко входам СУВУ, а выходы СУВУ подключены к управляющим входам реверсивных преобразователей, которые выполнены обратимыми, с раздельным заданием уровня ограничения тока в двигательном и тормозном режимах. Кроме того, ко входам СУВУ также могут быть подключены выходы преобразователей, несущие информацию о токе и скорости электродвигателей. СУВУ осуществляет формирование задания скорости (момента) двигателей с учетом положения руля и педалей газа и тормоза.
Для обеспечения требуемой (управляемой) плавности разгона ТС при начальном положении педали газа СУВУ задает нулевое значение тока (момента) и минимальное значение скорости. При нажимании на педаль газа вначале увеличивается значение задания тока (момента) при постоянном (минимальном) задании скорости. После достижения уровня предельного уровня токоограничения дальнейшее нажатие на педаль газа увеличивает задание скорости.
Для исключения потери сцепления колес с покрытием дороги (пробуксовки) СУВУ контролирует производную скорости колес при разгоне и при превышении заданной величины ограничивает уровень тока (момента), то есть обеспечивает антипробуксовочный режим.
Для повышения экономичности регулирования, обеспечения требуемой (управляемой) интенсивности торможения и устойчивости при интенсивном торможении СУВУ при уменьшении сигнала задания скорости и переходе привода в тормозной режим при начальном положении педали тормоза задает значение тормозного тока (момента): нулевое (режим свободного выбега) или определенное, наперед заданное (аналог торможения двигателем в автомобиле) и при нажатии на педаль тормоза увеличивает задание тормозного тока (момента). При этом СУВУ на основе информации о скорости колес контролирует интенсивность торможения «сверху» и при необходимости ограничивает величину тормозного момента либо формирует пульсирующую составляющую момента для предотвращения блокировки колес.
Целесообразно для повышения удобства управления и устойчивости использовать датчики поперечного ускорения, выходы которых подключаются ко входам СУВУ, реализуя при этом функцию обеспечения курсовой устойчивости.
Другие особенности и преимущества данного изобретения будут ясны из его последующего описания и чертежей, на которых изображены:
фиг.1 - схема предлагаемого ТС;
фиг.2 - схематическое изображение кинематической части ТС;
фиг.3 - расчетные зависимости от угла поворота руля X коэффициента скорости для колес 1, 3 и 4 и
фиг.4 - зависимости выходных сигналов СУВУ, скорости и момента.
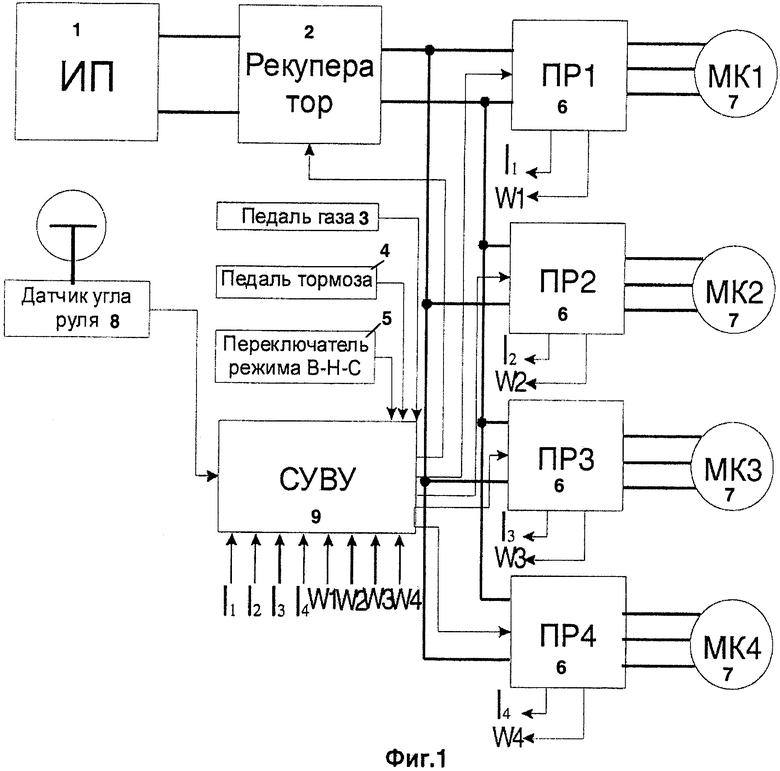
Обратимся к фиг.1, на которой представлена схема предлагаемого ТС.
ТС содержит или подключено к источнику питания ИП (1), рекуператор энергии (2), орган задания скорости (момента) движения (педаль газа) (3), орган задания момента торможения (педаль тормоза) (4), переключатель режима движения (вперед, назад, стоп) (5). В устройство введены обратимые преобразователи ПР1…ПР4 двигателей (6), связанных с колесами (или встроенных в колеса - мотор-колеса) МК1…МК4 (7), датчик угла поворота руля (8) и система управления верхнего уровня (СУВУ) (9), причем упомянутые органы задания и режима вместе с датчиком угла поворота руля подключены ко входам СУВУ, а выходы СУВУ подключены к управляющим входам преобразователей ПР1…ПР4.
Кроме того, ко входам СУВУ подключены также выходы преобразователей Ii и ωi, несущие информацию о токе и скорости соответствующего двигателя.
Источник питания (ИП) может быть реализован аккумуляторной батареей (АБ) и/или электрохимическим генератором на базе топливных элементов. Возможно также использование системы двигатель внутреннего сгорания - генератор, которая в сочетании с АБ образует так называемую комбинированную энергоустановку (КЭУ). ИП может быть внешним, как у троллейбуса.
Рекуператор - узел, содержащий накопители электроэнергии, например, суперконденсаторы, обеспечивающий прием энергии, вырабатываемой электродвигателями при торможении (рекуперации); хранение и возврат энергии в силовую цепь при разгоне и движении ТС по команде СУВУ.
Преобразователи ПР1…ПР4 обеспечивают регулирование скорости и/или момента приводных двигателей МК1…МК4 в соответствии с заданием СУВУ. Преобразователи обладают свойством обратимости - при работе двигателей в тормозном (генераторном) режиме осуществляют возврат энергии в питающую сеть.
Исполнительные двигатели МК1…МК4 могут быть различного исполнения - постоянного или переменного тока, коллекторные или бесколлекторные. В частности, могут быть использованы обращенные синхронные трехфазные двигатели с возбуждением от постоянных магнитов (у которых ротор - наружная вращающаяся часть, а статор - внутренняя неподвижная часть), встроенные в колесо - мотор-колесо.
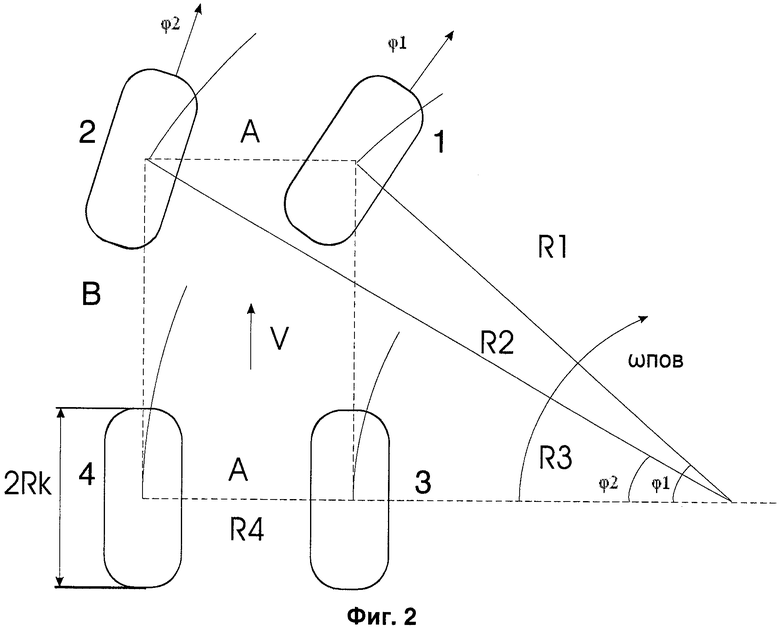
На фиг.2 показаны траектории движения МК при повороте транспортного средства и обозначены радиусы поворота центров МК и соответствующие углы. Смещением центров передних колес, обусловленных длиной рычагов, пренебрегаем, т.е. считаем, что колеса поворачиваются относительно вертикальной оси. При повороте ТС, например, направо необходимо с помощью рулевого устройства повернуть плоскости вращения МК1 и МК2 на углы φ1 и φ2 относительно продольной оси ТС. Одновременно нужно задать новые значения угловых скоростей МК, причем скорость наружного переднего колеса ω2 при правом повороте не меняется.
В схеме ТС использован наиболее часто применяющийся принцип Аккермана - принцип схождения осей передних колес при повороте в одной точке на продолжении оси задних колес.
На фиг.2 обозначены радиусы поворотов R1…R4 мотор - колес МК1…МК4, расстояние между центрами колес оси обозначено A, расстояние между осями - B, радиус колеса Rk.
Из приведенной схемы можно определить:
R1=B/sinφ1; R3=B*ctgφ1
R2=B/sinφ2; R4=B*ctgφ2
ωпов*R1=ω1* Rk, ωпов* R2=ω2* Rk
ωпов*R3=ω3* Rk, ωпов* R4=ω4* Rk
Выразим текущие значения скоростей МК через ω2:
ω1=(R1/R2)*ω2; ω3=(R3/R2)*φ2; ω4=(R4/R2)*ω2
или
ω1=(sinφ2/sinφ1)*ω2; ω3=ctgφ1*sinφ2*ω2; ω1=cosφ2*ω2
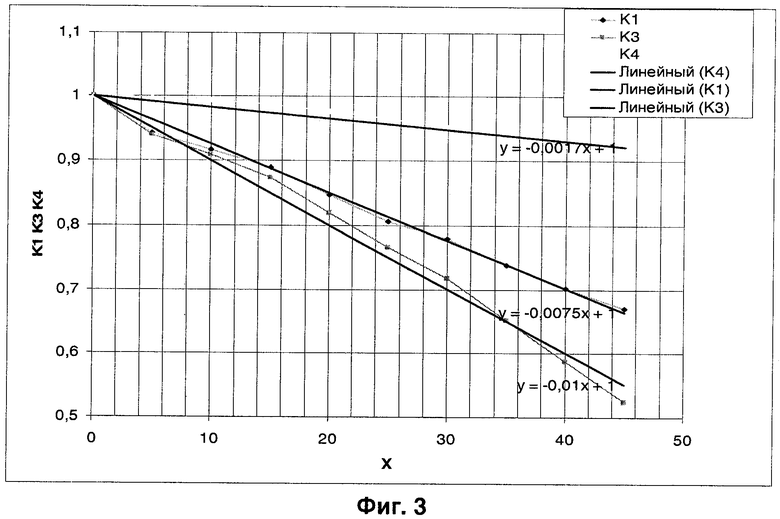
На фиг.3 представлены расчетные зависимости от угла поворота руля X коэффициента скорости для колес 1,3 и 4 от скорости ω2 и упрощенные (линеаризованные) зависимости и проведена оценка погрешности упрощения.
Проведенный анализ показывает:
- существенное отличие скоростей МК при повороте. Так, при повороте датчика руля на 40° скорости колес 2 (базового) и 3 характеризуются соотношением 1/0,6≈1,7;
- формирование задания для МК может быть осуществлено на базе упрощенных линейных зависимостей с приемлемой погрешностью (менее 5%).
Предлагаемое устройство работает следующим образом. СУВУ формирует сигналы задания скорости (момента) для преобразователей ПР1-ПР2 (ПР1…ПР4 или ПР3-ПР4 в зависимости от выбранного режима работы - передне-, задне- или полноприводное ТС) с учетом положения руля (датчика угла поворота руля) и положения педали газа (или тормоза) для каждого МК в соответствии, например, с приведенными выше зависимостями, чем обеспечивается равномерная загрузка МК.
Электропривод (ЭП) на базе ПР с МК представляет собой замкнутую по скорости систему, поэтому когда СУВУ формирует разные задания скорости для разных колес, электроприводы отрабатывают задание - поддерживают заданные значения скоростей. При этом токоограничение ЭП установлено на определенном, например, полутора-двукратном по отношению к номинальному току (моменту).
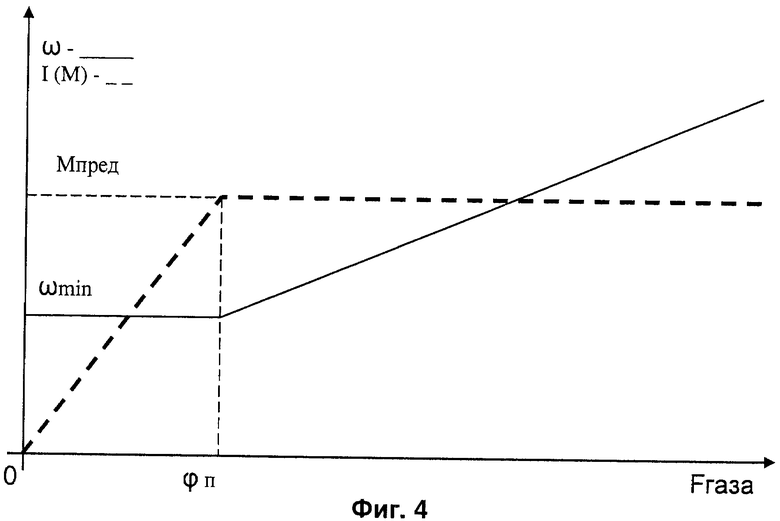
На фиг.4 представлена зависимость выходных сигналов СУВУ, задания скорости ω и тока (момента) I(M) от положения педали газа Fгаза. При стоящем ТС и начальном положении педали газа СУВУ задает ω мин и нулевой уровень тока (момента). При нажатии на педаль газа оператор (водитель) задает момент, развиваемый МК. При достижении текущим (задаваемым) моментом значения статического момента сопротивления ТС трогается и разгоняется с динамическим моментом, определяемым разностью задаваемого и статического моментов, т.е. определяемым оператором. По мере разгона ТС при достижении текущим значением скорости уровня ω мин ЭП работает в системе поддержания заданного значения скорости, а момент в ЭП ограничен на уровне Мпред. Т.о. обеспечивается пуск (трогание) ТС с интенсивностью, определяемой водителем.
При уменьшении величины задания скорости (или при полном отпускании педали газа) ЭП переходит в тормозной режим с минимальным (или нулевым) моментом торможения (свободный выбег). Наличие или величина минимального тормозного момента в этом режиме выставляется заранее, исходя из удобства (привычки) водителя - аналог «торможения двигателем в автомобиле».
Для увеличения тормозного момента водитель нажимает на педаль тормоза, задавая требуемую величину и обеспечивая требуемую интенсивность торможения. СУВУ на основании информации о скорости МК отслеживает динамику процесса торможения и при необходимости ограничивает величину тормозного момента, обеспечивая антиблокировочный режим.
Аналогичным способом, контролируя интенсивность разгона, СУВУ обеспечивает антипробуксовочный режим, ограничивая величину двигательного момента.
При установке датчиков поперечного ускорения СУВУ в состоянии при наличии требуемого программного обеспечения обеспечить также и систему курсовой устойчивости. Но в отличие от реализации указанных режимов на известных ТС в предлагаемом ТС указанные режимы обеспечиваются только электрическим способом - ограничением величин двигательного и/или тормозного моментов каждого колеса индивидуально, что при обеспечении режима рекуперации значительно повышает экономичность регулирования и повышает дальность пробега ТС на одной зарядке аккумуляторных батарей.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНОЕ ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ (ВАРИАНТЫ) | 2012 |
|
RU2513360C1 |
| Многоосевой преобразователь электропривода | 2016 |
|
RU2667482C1 |
| ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО С ЗАРЯДНЫМ УСТРОЙСТВОМ НА БОРТУ | 2012 |
|
RU2486074C1 |
| ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2538907C1 |
| ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2405686C1 |
| АВТОМОБИЛЬ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2003 |
|
RU2290330C2 |
| СПОСОБ МИНИМИЗАЦИИ УДЕЛЬНОГО РАСХОДА ТОПЛИВА ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ С ЧАСТИЧНОЙ РЕКУПЕРАЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2418185C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2778064C1 |
| Способ управления приводом электромобиля и устройство для его осуществления | 2018 |
|
RU2709639C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С КОМБИНИРОВАННЫМ МУСКУЛЬНЫМ И ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2014 |
|
RU2556051C1 |
Изобретение относится к области транспорта и направлено на усовершенствование электротранспортного средства, содержащего автономный источник питания. Электротранспортное средство содержит рекуператор энергии, орган задания момента и скорости движения, орган задания момента торможения, переключатель выбора режима движения, два или четыре приводных электродвигателя, связанных соответственно с двумя или четырьмя колесами транспортного средства. Транспортное средство включает также два или четыре реверсивных преобразователя для регулирования момента приводных электродвигателей. Транспортное средство снабжено датчиком поворота руля и системой управления верхнего уровня (СУВУ), причем органы задания и режима момента и скорости движения и момента торможения вместе с датчиком поворота руля подключены ко входам СУВУ, а выходы СУВУ подключены к управляющим входам реверсивных преобразователей, которые выполнены обратимыми, с раздельным заданием уровня ограничения тока в двигательном и тормозном режимах. Технический результат заключается в улучшении управляемости, маневренности экономичности регулирования. 4 з.п. ф-лы, 4 ил.
1. Электротранспортное средство, связанное с внешним источником питания или содержащее автономный источник питания; рекуператор энергии; орган задания момента и скорости движения; орган задания момента торможения; переключатель выбора режима движения; два или четыре приводных электродвигателя, связанных соответственно с двумя или четырьмя колесами транспортного средства; два или четыре реверсивных преобразователя для регулирования момента приводных электродвигателей, отличающееся тем, что оно снабжено датчиком поворота руля и системой управления верхнего уровня (СУВУ), причем указанные органы задания и режима момента и скорости движения и момента торможения вместе с датчиком поворота руля подключены ко входам СУВУ, а выходы СУВУ подключены к управляющим входам реверсивных преобразователей, которые выполнены обратимыми, с раздельным заданием уровня ограничения тока в двигательном и тормозном режимах.
2. Электротранспортное средство по п.1, отличающееся тем, что оно дополнительно снабжено преобразователями, несущими информацию о токе и скорости приводных электродвигателей, выходы которых подключены ко входам СУВУ.
3. Электротранспортное средство по п.1, отличающееся тем, что СУВУ задает нулевое значение тока и минимальное значение скорости для обеспечения требуемой плавности разгона ТС при начальном положении педали газа.
4. Электротранспортное средство по п.1, отличающееся тем, что СУВУ контролирует производную скорости колес при разгоне и при превышении заданной величины ограничивает уровень тока.
5. Электротранспортное средство по п.1, отличающееся тем, что оно снабжено датчиками поперечного ускорения, выходы которых подключены ко входам СУВУ.
| ЭЛЕКТРОМОБИЛЬ | 1992 |
|
RU2048309C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С РЕГУЛИРУЕМЫМ ЭЛЕКТРОДИНАМИЧЕСКИМ ТОРМОЖЕНИЕМ | 1993 |
|
RU2072926C1 |
| Устройство для слива светлых нефтепродуктов из железнодорожных цистерн | 1948 |
|
SU74107A1 |
| US 20030029654 A1, 13.02.2003. | |||

