Изобретение относится к способам и устройствам обнаружения и обезвреживания малогабаритных беспилотных летательных аппаратов (МБПЛА).
Известны и широко применяются различные активные и пассивные способы и устройства обнаружения и обезвреживания МБПЛА, попавших в охраняемую зону [1-3].
Недостатки известных устройств заключаются в ограниченных функциональных возможностях, отсутствии мобильности, универсальности, контроля обезвреживания беспилотных летательных аппаратов (БПЛА), невозможности обезвреживания (устранения) и транспортировки беспилотных летательных аппаратов БПЛА-нарушителей, попавших в охраняемую зону.
В качестве прототипа рассмотрим изобретение «Комплекс распределенного управления интеллектуальными роботами для борьбы с малогабаритными беспилотными летательными аппаратами» [4], который содержит коллектив мобильных наземных роботов высокой проходимости, интеллектуальный навигационный блок, интеллектуальный распознаватель, блок поиска БПЛА-нарушителя с комплексом различных датчиков, блок управления радиоэлектронной борьбы с блоком подавления сигналов управления, навигации, телеметрии и видеосигнала. БПЛА-охотник с блоком мехатронных сеток захвата, блоки питания и пультов управления, БПЛА-нарушитель.
Недостатки известного устройства (комплекса) заключаются в следующем:
1. Низкие (недостаточные) функциональные возможности, которые заключаются в способности уничтожать (обезвреживать) только БПЛА-нарушителей типа квадрокоптера, гексокоптера и другие БПЛА такого типа; комплекс не способен уничтожать (обезвреживать) БПЛА-нарушителей типа вертолет и самолет.
2. Низкая вероятность правильного уничтожения (низкая надежность уничтожения) БПЛА-нарушителя из-за имеющегося только блока мехатронных сеток захвата БПЛА-нарушителя.
3. Отсутствие возможности контролировать выполнение БПЛА-охотником уничтожение (обезвреживание) БПЛА-нарушителей любого типа.
Задачей является создание универсального интеллектуального комплекса распределенного управления для борьбы с малогабаритными БПЛА-нарушителями с улучшенными функциональными возможностями за счет расширения функциональных возможностей обеспечения способности уничтожать не только БПЛА типа квадрокоптер или гексокоптер, но и БПЛА-нарушителей типа вертолет или самолет, а также реализация возможности контроля выполнения задания по уничтожению БПЛА-нарушителя любого типа.
Поставленная задача достигается тем, что, как и известное устройство, заявленный универсальный комплекс распределенного управления интеллектуальными роботами содержит коллектив мобильных наземных роботов высокой проходимости (МНРВП) (1), блок поиска БПЛА-нарушителя (2), блок управления радиоэлектронной борьбы (БУРБ) (11), блок экстренной ликвидации БПЛА-нарушителя (БЭЛБПЛАН) (12), блок подавления сигнала управления, навигации, телеметрии и видеосигнала (БПСУНТВ) (20), интеллектуальный навигационный блок (ИНБ) (10), тепловизор (3), космический спутник (КС) (13), 3D цветную видеокамеру (3DЦB) (5), блок позиционирования по горизонту и по наклону (БПГН) (8), камеру ночного видения (КНВ) (7), блок мониторинга территорий (БМТ) (9), интеллектуальный распознаватель (ИР) (4), измеритель направления и скорости ветра (ИНСВ) (17), универсальный БПЛА-охотник (УБПЛАО) (14), блок мехатронных сеток захвата БПЛА-нарушителя (БМСЗБПЛАН) (15), компьютеризованный центральный пульт управления (КЦПУ) (18), блок памяти (БП) (21), универсальный блок питания (УБП) (22), при этом коллектив мобильных наземных роботов высокой проходимости (1), получает информацию от датчиков блока поиска БПЛА-нарушителя (2), подключен к блоку управления радиоэлектронной борьбы (11), который соединен с блоком экстренной ликвидации БПЛА-нарушителя (12) и блоком подавления сигнала управления, навигации, телеметрии и видеосигнала (20).
Новым является то, что универсальный комплекс оборудован следующим: в универсальный комплекс дополнительно введены между дополнительными выходами интеллектуального навигационного блока (ИНБ) (10) и дополнительными входами универсального БПЛА-охотника (УБПЛАО) (14) последовательно соединенными двухнаправленными линиями блок определения задания (БОЗ) (23) и блок наведения на узел БПЛА-нарушителя (БНУБПЛАН) (24) [6-10], а также введен между другими дополнительными выходами и входами интеллектуального навигационного блока (ИНБ) (10) и дополнительными входами и выходами БПЛА-нарушителя (БПЛАН) (16) блок оценки выполнения задания (БОВЗ) (27), отдельным входом подключенным к дополнительному выходу блока мехатронных сеток захвата БПЛА-нарушителя (БМСЗБЛАН) (15) и дополнительным выходам вновь введенным мехатронного блока с зацепом (МБЗ) (26), и блока манипуляторов (БМ) (25), причем мехатронный блок с зацепом (МБС) (26) и блок манипуляторов (БМ) (25) соединены двунаправленными линиями с отдельными входами и выходами с универсальным БПЛА-охотником (УБПЛАО) (14).
При этом, упомянутый универсальный БПЛА-охотник (14) оснащен мехатронным блоком с зацепом (МБЗ) (26), содержащий карбоновую трубку (КТ) (28), сложенный парашют (СП) (29), стропы парашюта (СП) (30), ПП (31), тонкий карбоновый стержень (ТКС) (32) и стальной зацеп (СЗ) (33), выполненный виде одного крючка, трех крючков или многочисленных крючков
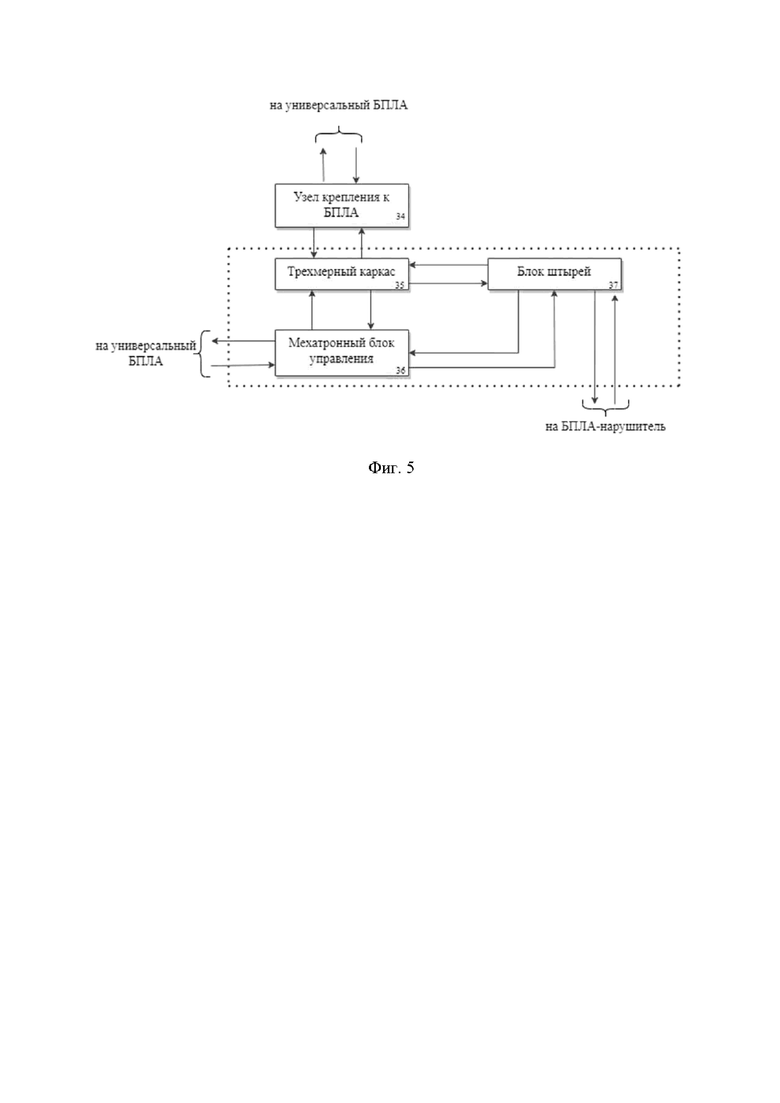
Кроме того, упомянутый блок манипуляторов (25) содержит следующие последовательно соединенные двунаправленными линиями узел крепления к БПЛА-охотнику (34), трехмерный каркас (35), мехатронный блок управления (МБУ) (36) и блок штырей (37), подключенный двунаправленными линиями к трехмерному каркасу (35).
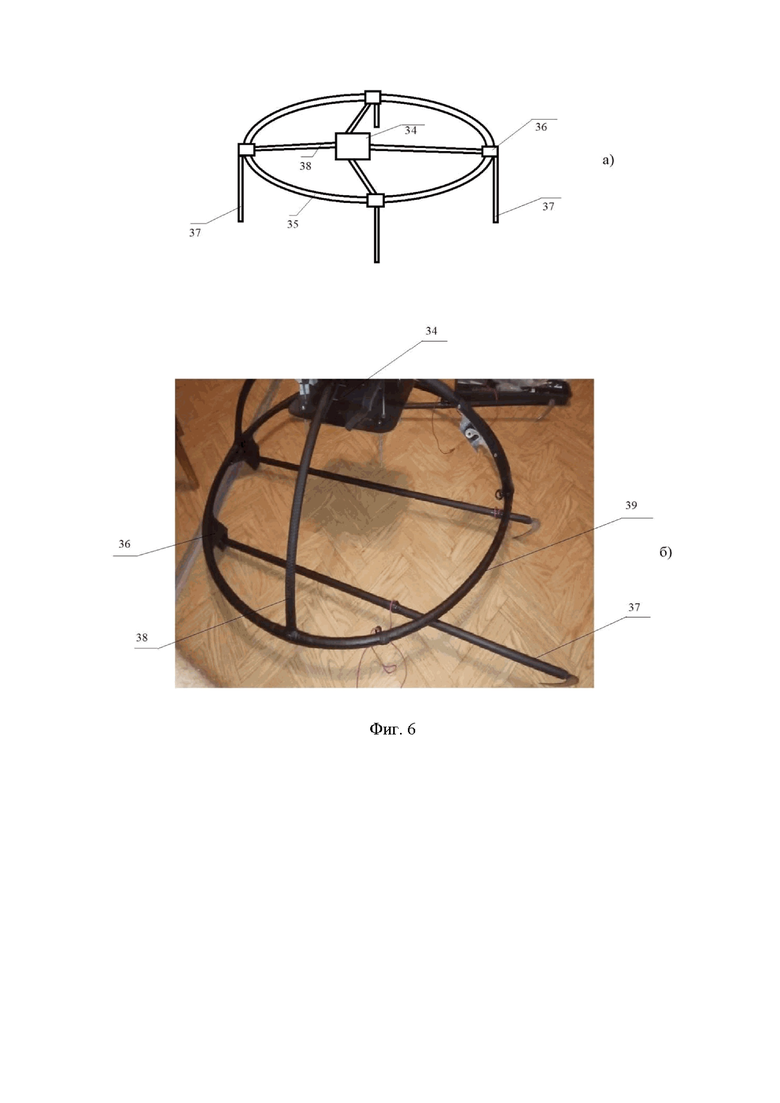
Кроме того, трехмерный каркас (35) выполнен в виде круглого обода (39), соединенного двумя полуободами (38), на пересечении соединений которых размещен узел крепления к БПЛА-охотнику (34), причем штыри блока штырей (37) крепятся к ободу (39) мехатронным блоком управления (МБУ) (36), который также управляет выдвижением штырей блока штырей (37).
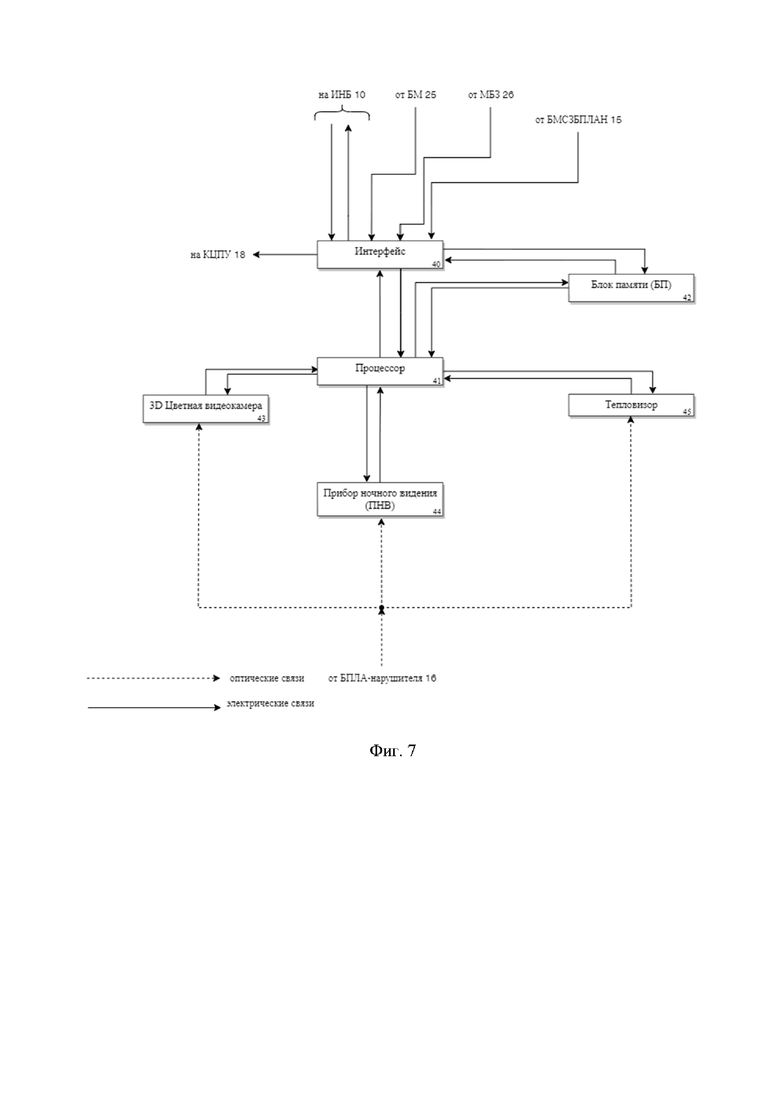
Кроме того, блок оценки выполнения задания (БОВЗ) (27) содержит интерфейс (40), процессор (41), блок памяти (БП) (42), 3D цветную видеокамеру (3DЦB) (43), прибор ночного видения (ПНВ) (44) и тепловизор (45), причем при сравнении текущего изображения (ТИ) и эталонного изображения (ЭИ) используется корреляционный, нейро-нечеткий и структурный анализ.
Кроме того, блок определения задания (БОЗ) (23) выполнен в виде анализатора и формирователя задания, причем БОЗ (23), анализируя информацию о БПЛА-нарушителя (16), а именно: тип, геометрия, цвет, координаты, скорость и высота полета, синтезирует задание для блока наведения на узел БПЛА-нарушителя (24).
Кроме того, блок наведения на узел БПЛА-нарушителя (БНУБПЛАН) (24) содержит считыватель и анализатор информации, определитель координаты, причем для работы БНУБПЛАН (24) применяются корреляционный, нейро-нечеткий и структурный анализ для распознавания изображений.
Предлагаемый универсальный комплекс иллюстрируется чертежами на фиг. 1-7.
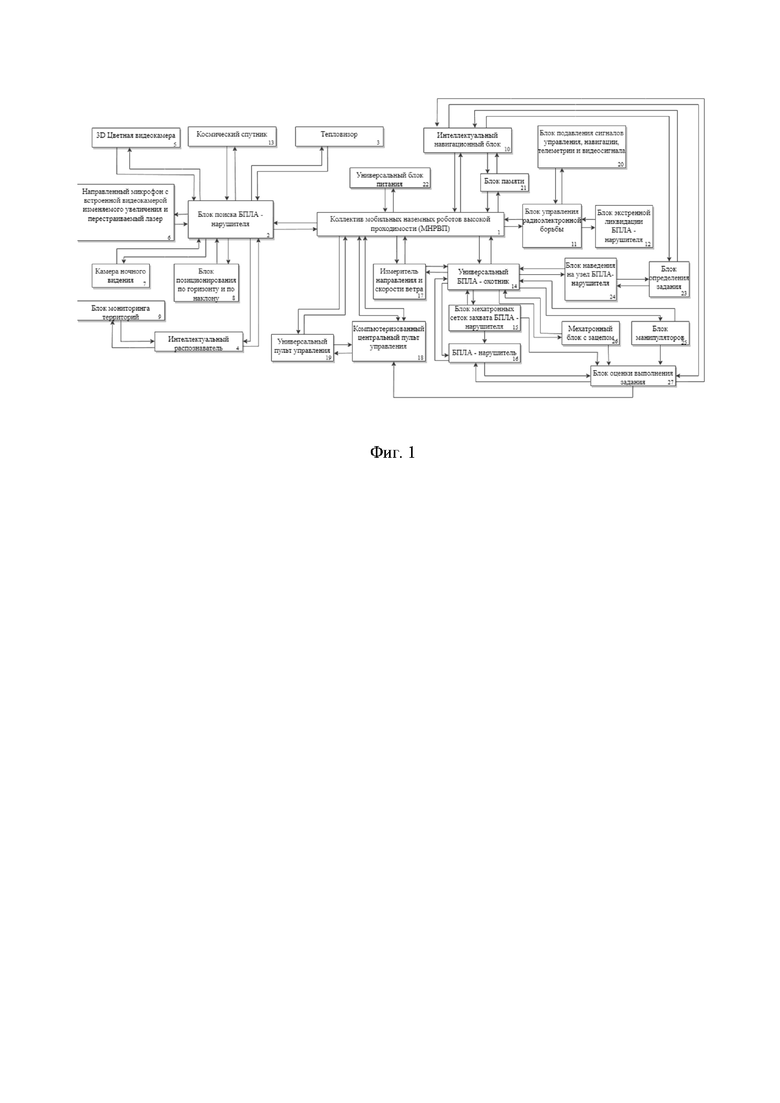
На фиг. 1 представлена структурная схема универсального комплекса.
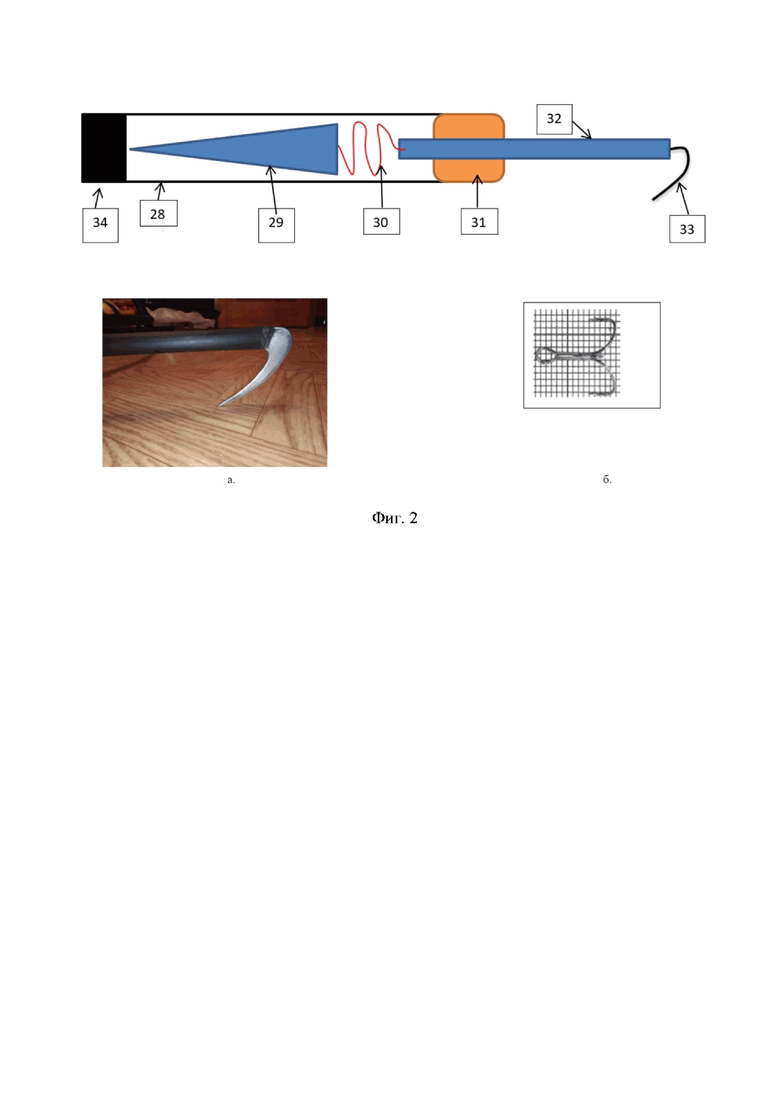
На фиг. 2 приведена структурная схема мехатронного блока с зацепом; варианты зацепов.
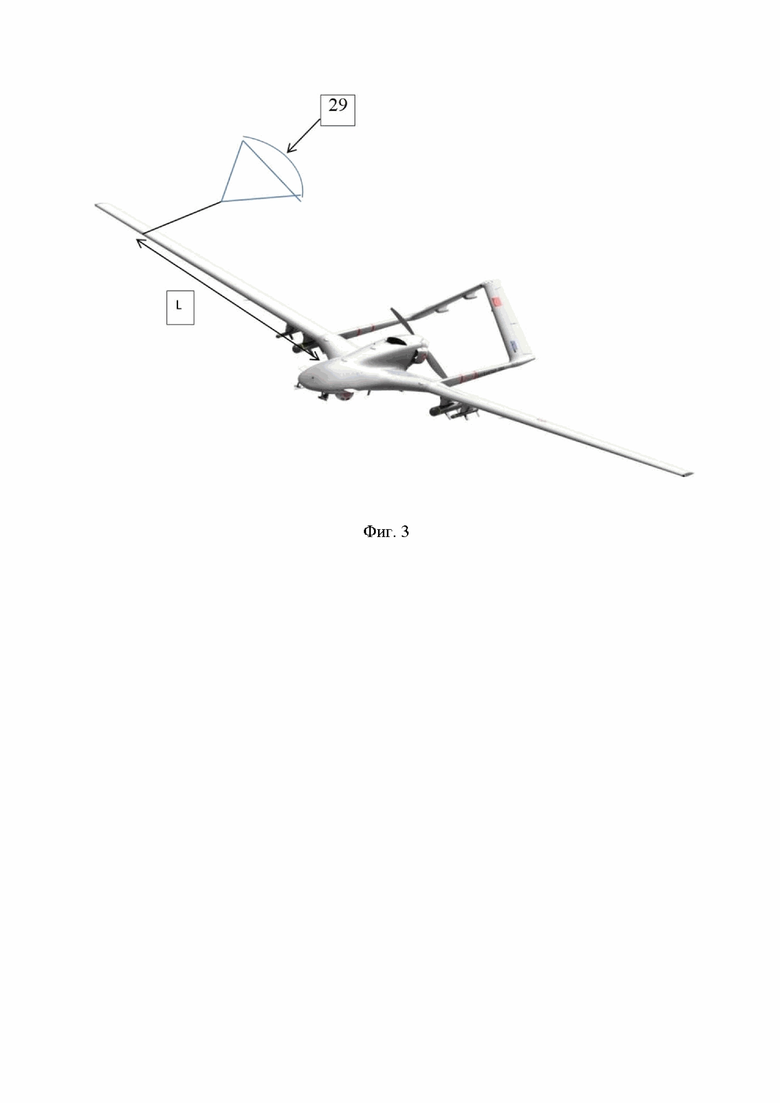
На фиг. 3 изображена схема, демонстрирующая уничтожение БПЛА-нарушителя самолетного типа.
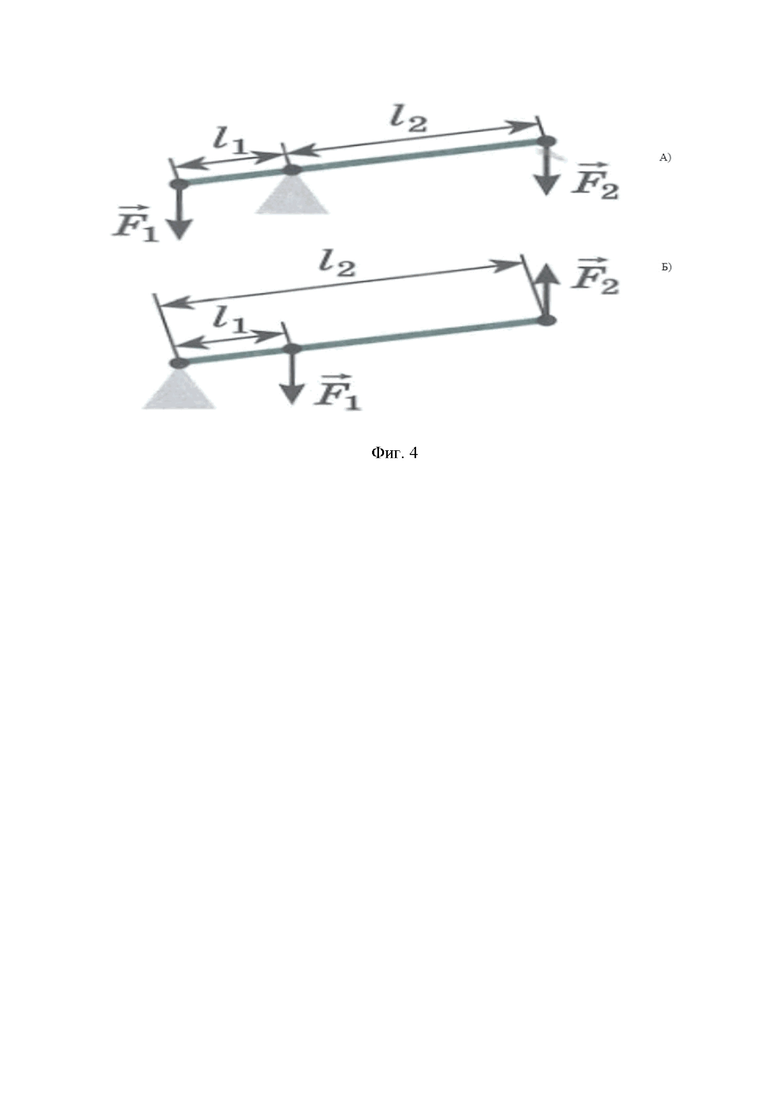
На фиг. 4 даны пояснения к приложению сил к крыльям самолета БПЛА-нарушителя.
На фиг. 5 дана структурная схема блока манипуляторов.
На фиг. 6 показана конструкция и внешний вид трехмерного каркаса.
На фи. 7 представлена структурная схема блока оценки выполнения задания.
На фиг. 1 приведена структурная схема предлагаемого устройства, содержащая следующие элементы, узлы и блоки:
1 - коллектив мобильных наземных роботов высокой проходимости (МНРВП);
2 - блок поиска БПЛА-нарушителя;
3 - тепловизор;
4 - интеллектуальный распознаватель (ИР);
5 - 3D цветная видеокамера (3DЦB);
6 - направленный микрофон с встроенной видеокамерой изменяемого увеличения и перестраиваемый лазер (НМВВИУПЛ);
7 - камера ночного видения (КНВ);
8 - блок позиционирования по горизонту и по наклону (БПГН);
9 - блок мониторинга территорий (БМТ);
10 - интеллектуальный навигационный блок (ИНБ);
11 - блок управления радиоэлектронной борьбы (БУРБ);
12 - блок экстренной ликвидации БПЛА-нарушителя (БЭЛБПЛАН)
13 - космический спутник (КС);
14 - универсальный БПЛА-охотник (УБПЛАО);
15 - блок мехатронных сеток захвата БПЛА-нарушителя (БМСЗБПЛАН);
16 - БПЛА-нарушитель;
17 - измеритель направления и скорости ветра (ИНСВ);
18 - компьютеризированный центральный пульт управления (КЦПУ);
19 - универсальный пульт управления (УПУ);
20 - блок подавления сигналов управления, навигации, телеметрии и видеосигнала (БПСУНТВ);
21 - блок памяти (БП);
22 - универсальный блок питания (УБП);
23 - блок определения задания (БОЗ);
24 - блок наведения на узел БПЛА-нарушителя (БНУБПЛАН);
25 - блок манипулятор (БМ);
26 - мехатронный блок с зацепом (МБЗ);
27 - блок оценки выполнения задания (БОВЗ).
Универсальный комплекс работает следующим образом [4].
Универсальный комплекс функционирует в пяти режимах:
Режим 1 - подготовка к работе (формирование эталонной информации и эталонных изображений, выполнение тестовых операций);
Режим 2 - дежурство, а в случае появления БПЛА-нарушителя формирование программы работы;
Режим 3 - проведение подготовительной операции: взлет универсального БПЛА-охранника, распознавание БПЛА-нарушителя, подготовка к обезвреживанию БПЛА-нарушителя;
Режим 4 - нейтрализация (уничтожение или захват) БПЛА-нарушителя и видеоконтроль нейтрализации БПЛА-нарушителя.
Режим 5 - транспортировка БПЛА-нарушителя в заданную зону.
В первом режиме функционирования предлагаемого универсального комплекса по периметру охраняемой зоны разворачиваются до 10 комплектов устройств (до 10 мобильных наземных роботов высокой проходимости (МНРВП) (1), несущих по 5 универсальных БПЛА-охотников (УБПЛАО) (14); всего до 50 УБПЛАО (14)). Затем в тестовом режиме проверяется функционирование блоков, узлов и приборов универсального комплекса. От космического спутника (КС) (13), 3D цветной видеокамеры (3DЦB) (5), измерителя направления и скорости ветра (ИНСВ) (17) и интеллектуального навигационного блока (ИНБ) (10) воспринимается и записывается в блок памяти (21) эталонная информация (ЭИ) местности, текущие координаты устройств (МНРВП) (1), погодные условия такие как: время суток, скорость и направление ветра, температура воздуха.
Во втором режиме функционирует МНРВП (1), КС (13), НМВВИУПЛ (6), КНВ (7), БПГН (8), БПН (2), БП (21), БПСУНТВ (20), УПУ (19) и КЦПУ (18). Направленный микрофон, снабженный встроенной видеокамерой изменяемого увеличения и перестраиваемым лазером (НМВВИУПЛ) (6) имеет усилитель и микроконтроллер для выделения гармонических сигналов в заданном частотном диапазоне, что позволяет обнаружить БПЛА-нарушитель (16) в любое время суток на расстоянии до 500 метров. Одновременно с НМВВИУПЛ (6) функционирует космический спутник (КС) (13), воспринимающий (считывающий) информацию об охраняемой территории. Тепловую информацию о БПЛА-нарушителей (16) получает тепловизор (3), который фиксирует точечный элемент БПЛА-нарушителей (16) с повышенной температурой (регуляторы и двигатели БПЛА-нарушителя (16) в процессе работы нагреваются). Кроме того, камера ночного видения (КНВ) (7) имеет систему автоматического слежения и ведет визуальное наблюдение за БПЛА-нарушителем (16) в ночное время. Объемная и цветная информация воспринимается 3D цветной видеокамерой (3DЦB) (5). Кроме того, перестраиваемый лазер НМВВИУПЛ (6) высвечивает бесшумные, но объемные БПЛА такие как планеры, воздушные шары. В случае обнаружения БПЛА-нарушителя (16) перечисленными приборами (тепловизором (3), КС (13), ИР (4), 3D цветной видеокамерой (3DЦB) (5), НМВВИУПЛ (6), КНВ (7)) заявленный универсальный комплекс распределенного управления переходит в третий режим функционирования (при этом БПГН (8) отслеживает горизонтальное положение БПЛА-нарушителя (16), также отслеживает его положение в вертикальной плоскости), т.е. происходит позиционирование платформы с приборами тепловизор (3), ИР (4), 3D цветная видеокамера (3DЦB) (5), НМВВИУПЛ (6), КВН (7) в горизонтальной плоскости на угол+/- 90 градусов с углом наклона по горизонту до 45 градусов. Таким образом, в этом режиме путем комплексной системы слежения возможно обнаружение любого БПЛА (мультикоптера, самолета, вертолета, планера, шара).
В третьем режиме работы происходит взлет универсального БПЛА-охотника (14) и сближение с БПЛА-нарушителем (16). При этом включается блок определения задания (БОЗ) (23), который функционирует, используя информацию от ИНБ (10). Этот БОЗ (23) формирует управляющие команды блоку наведения на узел БПЛА-нарушителя (24) в зависимости от типа БПЛА-нарушителя (16) (квадрокоптер, гексокоптер, вертолет, самолет). БНУБПЛАН (24), используя программное обеспечение и алгоритмы от интеллектуального распознавателя (ИР) (4) и интеллектуального навигационного блока (ИНБ) (10), определяет место (участок) или полностью БПЛА-нарушителя (16), а также определяет тип используемого блока (мехатронных сеток захвата БПЛА-нарушителя (15), мехатронный блок с зацепом (26), блок манипуляторов (25)).
В четвертом режиме (нейтрализация БПЛА-нарушителя) при получении информации с любого датчика происходит переключение скорости позиционирования блока поиска (2) на малую скорость, включается горизонтальное позиционирование БПГН (8), определяется максимальная амплитуда выходного сигнала БПГН (8) и определяется направление и высота полета БПЛА-нарушителя (16) (временные затраты на данные операции - не более 2 секунд). Данные передаются по цифровому каналу связи на компьютеризированный центральный пульт управления (КЦПУ) (18) для принятия решения о нейтрализации БПЛА-нарушителя (16). Все полученные данные записываются в блок памяти (21) и на электронный диск КЦПУ (18) для последующего разбора правильности выполнения команд другими блоками комплекса и правильности действий оператора.
Последний этап четвертого режима функционирования комплекса: включаются БУРБ (11), БПСУНТВ (20) и БЭЛБПЛАН (12). БУРБ (11) управляет нейтрализацией БПЛА-нарушителя (16) радиоэлектронными методами. БПСУНТВ (20) подавляет управляющие сигналы БПЛА-нарушителя (16) при ручном управлении или при передаче сигналов телеметрии. БПСУНТВ (20) искажает показания всех навигационных систем и делает невозможным полет БПЛА-нарушителя (16) по заданной программе, подавляет видеосигналы от всех его бортовых видеокамер. Подавление сигналов и искажение информации происходит при работе БУРБ (11), он управляет БПСУНТВ (20) для подавления всех возможных сигналов БПЛА-нарушителя (16), генерирующих до 12 радиочастот, например, частота 2,3-2,5 ГГц (при ручном управлении БПЛА-нарушителем (16)), частота 433 МГц (при использовании модема телеметрии), частота 1,6-1,8 ГГц (управлении от космического спутника (КС) (13)), частота 5, 8 ГГц (работа видеокамер БПЛА-нарушителя (16)). В результате БПЛА-нарушители (16) либо «зависают» на большой высоте (мультикоптеры), либо падают на земную поверхность (мультикоптеры, дроны с крыльями).
Далее происходит сближение УБПЛАО (14) и БПЛА-нарушителей (16) по сигналам бортовой телеметрии УБПЛАО (14), не используя внешнее управление и навигацию. При подлете к БПЛА-нарушителям (16) у УБПЛАО (14) распускаются мехатронные сетки захвата (МСЗ) (15), которые окутывают БПЛА-нарушителей (16) [1-3].
В четвертом режиме также включается либо мехатронный блок с зацепом (МБЗ) (26), либо блок манипуляторов (БМ) (25). Включение БМСЗБПЛАН (15), МБЗ (26) или БМ (25) обеспечивает блок определения задания (БОЗ) (23) через блок наведения на узел БПЛА-нарушителя (16) БНУБПЛАН (24) и УБПЛАО (14). Таким образом, с помощью зацепов МБЗ (26) или манипуляторов (штырей) нейтрализуется также самолет или вертолет. Далее блок оценки выполнения задания (БОВЗ) (27), содержащий цветную 3D видеокамеру (3DЦB) (43), прибор ночного видения (ПНВ) (44), процессор (41), блок памяти (БП) (42), интерфейс (40), а также всю необходимую информацию от интеллектуального навигационного блока (ИНБ) (10) (например, звуковую), оценивает выполнение задания (уничтожение БПЛА-нарушителя (16)).
В пятом режиме работы предлагаемого комплекса происходит захват и транспортировка БПЛА-нарушителей (16) в заданное место на МНРВП (1) (или другое заданное место). При обнаружении МНРВП (1) БПЛА-нарушителя (16) координаты нарушителей вводятся в процессор УБПЛАО (14), они стартуют с МНРВП (1) и летят в сторону БПЛА-нарушителей (16). Стартующие УБПЛАО (14) разделяются на две группы: первая группа перемещается к БПЛА-нарушителям (16), которые находятся в пространстве, а вторая группа УБПЛАО (14) перемещается к БПЛА-нарушителям (16), упавшим на земную поверхность. После электронного захвата и идентификации УБПЛАО (14) БПЛА-нарушителя (16) универсальный БПЛА-охотник (14) передает сигнал об этом на МНРВП (1) и на КЦПУ (18), которые включают (в случае необходимости) повторные операции блокирования (подавления) сигналов управления БПЛА-нарушителей (16).
После захвата БПЛА-нарушителей (14) компьютеризованным центральным пультом управления (18) или непосредственно МНРВП (1) выключает аппаратуру радиоэлектронной борьбы (БУРБ (11), БЭЛБПЛАН (12), блок подавления сигнала управления, навигации, телеметрии и видеосигнала (20)), и универсальный БПЛА-охотник (14) продолжает управляемый полет на базу с захваченным БПЛА-нарушителем (16).
Универсальный блок питания (УБП) (22), осуществляющий электропитание предлагаемого комплекса (кроме универсальных БПЛА-охотников (14), имеющих автономное питание), состоит из аккумулятора, блока подзарядки на основе солнечной батареи и ветряного миниэнергоблока.
На самом УБПЛАО (14) блок МСЗ (15) целесообразно закрепить по периметру круга, образующего посадочную платформу шасси. Сама сетка имеет форму цилиндра с сужением на конце и с закрепленным грузом. Ввиду симметричности данная сетка наиболее стабильна в полете. На начальном этапе полета сетка с обручем размещается в специальном контейнере на шасси, сетка выбрасывается при подлете к нарушителю по команде оператора или полетного контроллера. Если вес нарушителя превышает грузоподъемность дрона, шасси имеет механизм расстыковки, который отсоединяет средство захвата, и нарушитель вместе с сеткой и обручем падает на землю. Сетка может быть в виде крупной ячеистой сети типа рыболовной, или в виде металлической сетки, и может быть оборудована парашютом. Блок МСЗ (19) может содержать несколько сеток.
Рассмотрим варианты исполнения введенных блоков в известное устройство.
На фиг. 2 даны варианты исполнения блока уничтожения структуры (4а) и элементов (б, в) мехатронного блока с зацепом (МБЗ) (26), который состоит из следующий устройств:
28. Карбоновая трубка (КТ) (диаметром 25 мм).
29. Сложенный парашют (СП) (площадью 0.75 м2)
30. Стропы парашюта (СП).
31. Пробка предохранитель (ПП).
32. Тонкий карбоновый стержень (ТКС).
33. Стальной зацеп (СЗ).
34. Узел крепления к БПЛА-охотнику (фиксатор в горизонтальном положении, пружинный механизм перевода вниз под углом 45 градусов).
МБЗ (26) крепится на любой квадрокоптер или гексокоптер с помощью узла крепления к БПЛА-охотнику (34) на шасси или защитное кольцо, выполняющее роль шасси. На самолет крепится в нишу нижней части фюзеляжа для сохранения аэродинамических свойств.
Далее блок наведения на узел БПЛА нарушителя (БНУБПЛАН) (24) обеспечивает подлет универсального БПЛА охотника (УБПЛАО) (14) на расстояние около 2 м к БПЛА-нарушителя (16) и подает команду на набор высоты от 10 до 50 см. В это время срабатывает механизм высвобождения толстой карбоновой трубки (28) блока уничтожения. Тонкий карбоновый стержень (32) отклоняется вниз на угол 45° (переводится в боевое положение).
Далее происходит касание тонкого карбонового стержня (ТКС) (32) корпуса БПЛА-нарушителя (16). ТКС (32) в процессе движения скользит по корпусу БПЛА-нарушителя (16) до соприкосновения с острым стальным зацепом (33) на конце. Острие (СЗ) (33), который может быть выполнен в виде одного крючка, трех крючков или многочисленных крючков, входит в корпус БПЛА-нарушителя (16) и надежно застревает в нем. Далее все зависит от массы БПЛА-нарушителя (16) и разности взаимных скоростей. Пробка предохранитель (31) предназначена для защиты от больших силовых нагрузок при захвате БПЛА-нарушителя (16). ПП (31) вылетает из КТ (28) при весовой нагрузке более 3 кг, обеспечивая сохранность универсального БПЛА-охотника (14). При превышении нагрузки ПП (31) вылетает из КТ (28), увлекая за собой посредством СП (30) сложенный парашют (СП) (29).
Сложенный парашют (29) раскрывается и делает дальнейший полет БПЛА-нарушителя (16) невозможным. В процессе испытаний система показала эффективность порядка 98% при борьбе со всеми типами БПЛА-нарушителей.
При уничтожении коптера (квадрокоптер, гексокоптер) имеются рекомендации:
- в процессе соприкосновения ТКС (32) блока уничтожения с корпусом коптера-нарушителя с вероятностью 98% происходит разрушение винтомоторной группы и падение БПЛА-нарушителя (16) на землю;
- в случае, когда захват произошел в центральной части БПЛА-нарушителя (16) и все пропеллеры остались целыми, легкие коптеры (БПЛА) обычно повисают на крючке, ломают пропеллеры об защитное кольцо и в последующем доставляются в место старта универсального БПЛА-охотника (14);
- в случае срабатывания ПП (31) на БПЛА-нарушителя (16) раскрывается сложенный парашют (29), который делает дальнейший полет БПЛА-нарушителя (16) невозможным.
При уничтожении БПЛА-нарушителя (16) самолетного типа:
При применении системы против БПЛА самолетного типа нужно рассмотреть сам принцип полета самолета. Любой самолет держится в воздухе за счет подъемной силы крыльев, а подъемная сила возникает при движении крыла относительно воздуха. При этом существует понятие скорости сваливания. Это скорость, при которой самолет уже не может лететь и сваливается на крыло (штопор). Если после этого он не сможет набрать скорость, он упадет [17].
В случае применения предлагаемого устройства необходимо обеспечить контакт ТКС (32) с СЗ (33) в контакт с БПЛА-нарушителя (16) в любом месте, в идеальном случае в районе крыла. Далее СЗ (33) входит в пластик, дерево или дюраль крыла и надежно застревает в нем. ПП (31) вылетает из КТ (28), освобождая СП (29).
Пробьет ли СЗ (33) обшивку крыла БПЛА-нарушителя (16). Для полета БПЛА-нарушителя (16) нужна скорость не менее 25 м/с относительно воздуха. Универсальный БПЛА-охранник (14) тоже имеет скорость не меньше. Взаимные скорости складываются. Отметим, что ПП (31) срабатывает при нагрузке более 3 кг. Получаем формулу энергии: Eк=mv2/2, при массе m и скорости v (m - масса БПЛА, v - скорость); Если m=3000 гр; v=502=2500, Получаем, Е=3000×2500/2=3750000 Дж.
Отметим, что энергия пули автомата 297675 Дж. Получается, что это очень высокая энергия Е.
В результате, если еще учесть площадь поперечного сечения острия СЗ (33) в 1 мм, то получим фантастическую пробивную силу. СЗ (33) пробьет любую обшивку или разрежет крыло БПЛА-нарушителя (16).
Если крыло оказалось крепким, то в этом случае сложенный парашют (29) создаст сопротивление движению БПЛА-нарушителя (14), он свалится в штопор и приземлится на СП (29) нашей системы. Если самолет нарушитель окажется тяжелого класса, типа Байрактар, то он обезвреживается также с вероятностью около 100%.
Рассмотрим, как обезвредить гарантированно большой, БПЛА типа американского MQ-9 или турецкого Байрактара. Отличие только в том, что контакт универсального БПЛА-охотника (14) должен произойти на одном из крыльев БПЛА-нарушителя (16). Крейсерская скорость данного БПЛА-нарушителя (16) порядка 200 км/час.
При такой скорости тормозной парашют (ТП) 29 площадью 0.75 м2 создаст усилие порядка 200 кг. Размах крыльев БПЛА-нарушителя (16) (самолета) 21 метр, размах одного крыла 10.5 метра. Взлетный вес аппарата БПЛА-нарушителя 16650 кг. Далее используем правило рычага [17]. У самолета (БПЛА-нарушителя (16)) центр фюзеляжа является центром приложения суммы подъемных сил двух крыльев. В идеале обе силы должны быть одинаковые для совершения прямолинейного полета. Если произойдет соединение одного из крыльев с тормозным парашютом, то скорость этого крыла резко уменьшится, подъемная сила упадет и БПЛА-нарушителя (16) по спиралевидной траектории начнет движение к земле с последующем разрушением. Чем дальше от центра фюзеляжа произойдет контакт, тем круче будет угол спирали (фиг. 3, 4). На фиг. 3, 4 даны следующие обозначения: L - расстояние от фюзеляжа до точки контакта парашюта 29; 
 - расстояния приложения сил; F1, F2 - силы. В случае зацепа в центральной части или за стабилизатор скорости БПЛА-нарушителя (16) существенно снизится из-за большего аэродинамического сопротивления и БПЛА-нарушитель (16) начнет снижение по крутой траектории, пока не ударится о землю.
- расстояния приложения сил; F1, F2 - силы. В случае зацепа в центральной части или за стабилизатор скорости БПЛА-нарушителя (16) существенно снизится из-за большего аэродинамического сопротивления и БПЛА-нарушитель (16) начнет снижение по крутой траектории, пока не ударится о землю.
Рассмотрим вариант функционирования блока манипуляторов (БМ) (25). На фиг. 5, 6 даны следующие обозначения [5, 12]:
34 - узел крепления к БПЛА-охотнику;
35 - трехмерный каркас (ТК);
36 - мехатронный блок управления (МБУ);
37 - блок штырей;
38 - полукруглая поперечина (ПП);
39 - круглый обод (КО).
На фиг. 5 представлена структурная схема блока манипуляторов (БМ) (25), функционирующего следующим образом. К универсальному БПЛА-охотнику (14) БМ (25) крепится с помощью узла крепления к БПЛА-охотнику (34) и трехмерного каркаса (35), в котором размещаются блок штырей (37) и мехатронный блок управления (36). Для управления штырями блока штырей (37) имеется мехатронный блок управления (36), соединяющий трехмерный каркас (35) и штырь блока штырей (37) [4, 5]. По сигналу от универсального БПЛА-охотника (14) МБУ (36) включает блок штырей (37), освобождает штыри блока штырей (37) и направляет их на пропеллеры квадрокоптера (гексокоптера) или вертолета. Попадание штырей блока штырей (37) на пропеллеры разрушает пропеллеры, что приводит к ликвидации летательного аппарата мультироторного типа (квадрокоптера, гексокоптера) или вертолета. На фиг. 6 показана конструкция (а) и внешний вид (б) трехмерного каркаса (35).
На фиг. 7 представлена структурная схема блока оценки выполнения задания (БОВЗ) (27). БОВЗ (27) содержит следующие блоки, приборы и элементы:
40 - интерфейс;
41 - процессор;
42 - блок памяти (БП);
43 - 3D цветная видеокамера (3DЦB);
44 - прибор ночного видения (ПНВ);
45 - тепловизор.
БОВЗ (27) функционирует следующим образом. От ИНБ (10) поступает через интерфейс (40) на БОВЗ (27) информация - задающие сигналы о необходимой ликвидации БПЛА-нарушителя (16), а также поступает на БОВЗ (27) информация от БМСЗБПЛАН (15), МБЗ (26) и БМ (25) о процессе ликвидации БПЛА-нарушителя (16). Процесс уничтожения БПЛА-нарушителя (16) снимается 3D цветной видеокамерой (3DЦB) (43), прибором ночного видения (ПНВ) 44 и тепловизором 45, преобразовывается для согласования с блоком управления радиоэлектронной борьбы (11) и передается в процессор (41). Процессор (41) сравнивает эталонное изображение (ЭИ) БПЛА-нарушителя (16) (до начала его уничтожения) с текущим изображением (ТИ) БПЛА-нарушителя (16) (после проведения его уничтожения) и выносит решение о выполнении задания по уничтожению БПЛА-нарушителя (16). При сравнении ЭИ и ТИ используется корреляционный, нейро-нечеткий и/или структурный анализ изображения [4-10]. Вся текущая информация записывается в блок памяти (БП) (42) (ТИ, ЭИ, задания, команды, программное обеспечение для распознавания изображений) и используется в процессе функционирования БОВЗ (27).
На блок определения задания (БОЗ) (23) поступает от ИНБ (10) информация о характеристиках БПЛА-нарушителя (16), а именно: тип, геометрия, цвет, скорость, координаты и высота полета. Синтезируется (определяется) задание для блока наведения на узел БПЛА-нарушителя (24).
Далее БНУБПЛАН (24) готовит информацию и обеспечивает наведение универсального БПЛА-охотника (14) на узел (крыло, корпус, фюзеляж) БПЛА-нарушителя (16). Для этого используется информация интеллектуального распознавателя (ИР) (4), камеры ночного видения (КНВ) (7), 3D цветной видеокамеры (3DЦB) (5), тепловизора (3), космического спутника (КС) (13) и направленного микрофона с встроенной видеокамерой изменяемого увеличения и перестраиваемый лазер (НМВВИУПЛ) (6), а также считывается (используется) информация от ВОЗ (23). Для наведения на узел (или весь БПЛА-нарушителя (16)) применяется программное обеспечение на основе корреляционного, структурно-перестраиваемых или нейро-сетевых алгоритмов [4-10].
Предлагаемый универсальный комплекс обладает лучшими техническими характеристиками, которые заключаются в следующем:
1. Более широкими функциональными возможностями, характеризующимися способностью уничтожать не только БПЛА-нарушителя (16) типа квадрокоптер, гексокоптер, но и БПЛА-нарушителя (16) типа самолет или вертолет.
2. Более высокой вероятностью правильного уничтожения БПЛА-нарушителя (16) (квадрокоптер, гексокоптер, самолет или вертолет) за счет дополнительно введенных мехатронного блока с зацепом (26), блока манипуляторов (25), блока определения задания (23) и блока наведения на узел БПЛА-нарушителя (24).
3. Обеспечения возможности контроля выполнения уничтожения БПЛА-нарушителей любого типа за счет дополнительно введенного блока оценки выполнения задания 27 [7-10].
Проведенные экспериментальные исследования подтвердили вышеуказанные улучшенные технические характеристики универсального комплекса.
Список источников и литературы:
1. Способ пассивного обнаружения и определения координат малогабаритных беспилотных летательных аппаратов. Патент РФ №2574224 С1, МПК G01S 17/06 (2006/01).
2. Радиолокационный способ обнаружения малозаметных беспилотных летательных аппаратов. Патент РФ №2534217 С1, МПК G01S 13/04 (2006.01) публ. 27.11.2014, Бюл №33.
3. Система управления комплексными методами борьбы с малогабаритными беспилотными летательными аппаратами. Патент РФ №2578524 С2, МПК F41H 11/02 (2006.01), Публ. 27.03.2016, Бюл. №9.
4. Патент РФ №2717047. Комплекс распределенного управления интеллектуальными роботами для борьбы с малогабаритными беспилотными летательными аппаратами. Бюл. №8 от 18.03.2020.
5. Сырямкин В.И. Информационные устройства и системы в робототехнике и мехатронике: учебное пособие. (Серия: Интеллектуальные технические системы). - Томск: Изд-во Том. ун-та, 2016. - 524 с. (см. стр. 139-236, 424-432, 468-487).
6. Абрамова Т.В., Ваганова Е.В., Горбачев С. В., Сырямкин В.И., Сырямкин М.В. Нейро-нечеткие методы в интеллектуальных системах обработки и анализа многомерной информации. - Томск: Изд-во Том. ун-та. 2014. - 442 с. (см. стр. 9-71, 338-434).
7. Горбачев С. В., Емельянов С.Г., Жданов Д.С., Мирошниченко С.Ю., Сырямкин В.И., Титов Д.В. Цифровая обработка аэрокосмических изображений. - Томск: Изд-во Том. ун-та, 2016. - 304 с. (см. стр. 24-64, 96-211, 250-276).
8. Сырямкин В.И., Соломонов Ю.С., Соломонов Л.С.и др. Способ управления движущимся объектом и устройство для его осуществления. Патент на изобретение РФ, №2476825 от 10.03.2011. Публ. 27.02.2013. Бюл. №6.
9. Сырямкин В.И., Шидловский B.C. Корреляционно-экстремальные радионавигационные системы. Томск: Изд-во Том. ун-та, 2010. - 316 с. (см. стр. 73-183).
10. Сырямкин В.И., Шумилов В.Н. Синтез искусственного носителя интеллекта: информационно-биологический подход; под ред. д.т.н., проф. В.И. Сырямкина. - Москва; Берлин: Директ-Медиа, 2021. - 412 с.
11. Ориентация и навигация подвижных объектов: современные информационные технологии / Под ред. Б.С. Алешина и др. - М.: ФИЗМАТЛИТ, 2006. - 424 с.
12. Бубенчиков М.А. и др. Современные методы исследования материалов и нанотехнологий / Под ред. д.т.н., профессора В.И. Сырямкина. - Томск: Изд-во Том. ун-та. 2010. - 366 с.
13. Богомолов Е.Н. и др. Метрология и сертификация диагностического оборудования и материалов. - Томск: Издательский Дом Томского государственного университета, 2015. - 164 с.
14. Измерители и анализаторы. [Электронный ресурс] / URL: http://www.rhbz.rti/appendices/measuring-instmments-analyzers.html.
15. Все о металлоискателях и металлодетекторах. Принципы работы. Электронный ресурс URL: http://izmer-ls.ru/met/sche1-1.html.
16. Патент РФ №2661295 РФ. Устройство для определения разметки участков территории с химическим и радиоактивным заражением. Бюл. №20 от 13.07.2018 (приор. 04.07.2017).
17. Аэродинамика и самолетостроение: учеб. Пособие / [В.В. Бирюк и др.]. - Самара: Изд-во Самарского университета, 2018. - 180 с.: ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| Комплекс распределенного управления интеллектуальными роботами для борьбы с беспилотными аппаратами | 2024 |
|
RU2838977C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ И РАЗМЕТКИ УЧАСТКОВ ТЕРРИТОРИИ С ХИМИЧЕСКИМ И РАДИОАКТИВНЫМ ЗАРАЖЕНИЕМ | 2017 |
|
RU2661295C1 |
| РОБОТ ДЛЯ ДИАГНОСТИКИ И РЕМОНТА ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2019 |
|
RU2721473C1 |
| Устройство перехвата беспилотных летательных аппаратов | 2020 |
|
RU2738383C2 |
| ТРУБОПРОВОДНЫЙ ДИАГНОСТИЧЕСКИЙ РОБОТ | 2018 |
|
RU2707644C1 |
| СПОСОБ ПОРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ НАД ОБЪЕКТОМ | 2024 |
|
RU2838712C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ, БЛОК ВИДЕОАППАРАТУРЫ ДЛЯ НЕГО И КАТАПУЛЬТА (ВАРИАНТЫ) ДЛЯ ЕГО ЗАПУСКА | 2010 |
|
RU2466909C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2465552C1 |
Изобретение относится к устройствам обнаружения и обезвреживания малогабаритных беспилотных летательных аппаратов (МБПЛА). Комплекс распределенного управления интеллектуальными роботами для борьбы с МБПЛА содержит коллектив мобильных наземных роботов высокой проходимости, блок поиска БПЛА-нарушителя, блок управления радиоэлектронной борьбы, блок экстренной ликвидации БПЛА-нарушителя, блок подавления сигнала управления, навигации, телеметрии и видеосигнала, интеллектуальный навигационный блок, тепловизор, космический спутник, 3D цветную видеокамеру, блок позиционирования по горизонту и по наклону, камеру ночного видения, блок мониторинга территорий, интеллектуальный распознаватель, измеритель направления и скорости ветра, универсальный БПЛА-охотник, блок мехатронных сеток захвата БПЛА-нарушителя, центральный пульт управления, блок памяти, универсальный блок питания, блок определения задания, блок наведения на узел БПЛА-нарушителя, блок оценки выполнения задания, мехатронный блок с зацепом, блок манипуляторов. Обеспечивается способность уничтожать БПЛА любого типа. 6 з.п. ф-лы, 7 ил.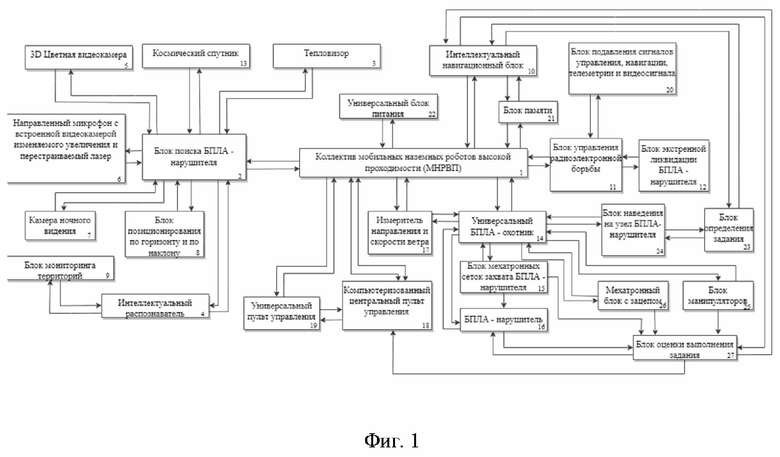
1. Универсальный комплекс распределенного управления интеллектуальными роботами для борьбы с малогабаритными беспилотными летательными аппаратами (БПЛА), содержащий коллектив мобильных наземных роботов высокой проходимости (МНРВП) (1), блок поиска БПЛА-нарушителя (2), блок управления радиоэлектронной борьбы (БУРБ) (11), блок экстренной ликвидации БПЛА-нарушителя (БЭЛБПЛАН) (12), блок подавления сигнала управления, навигации, телеметрии и видеосигнала (БПСУНТВ) (20), интеллектуальный навигационный блок (ИНБ) (10), тепловизор (3), космический спутник (КС) (13), 3D цветную видеокамеру (3DЦB) (5), блок позиционирования по горизонту и по наклону (БПГН) (8), камеру ночного видения (КНВ) (7), блок мониторинга территорий (БМТ) (9), интеллектуальный распознаватель (ИР) (4), измеритель направления и скорости ветра (ИНСВ) (17), универсальный БПЛА-охотник (УБПЛАО) (14), блок мехатронных сеток захвата БПЛА-нарушителя (БМСЗБПЛАН) (15), компьютеризованный центральный пульт управления (КЦПУ) (18), блок памяти (БП) (21), универсальный блок питания (УБП) (22), при этом коллектив мобильных наземных роботов высокой проходимости (1) получает информацию от датчиков блока поиска БПЛА-нарушителя (2), подключен к блоку управления радиоэлектронной борьбы (11), который соединен с блоком экстренной ликвидации БПЛА-нарушителя (12) и блоком подавления сигнала управления, навигации, телеметрии и видеосигнала (20),
отличающийся тем, что в универсальный комплекс дополнительно введены между дополнительными выходами интеллектуального навигационного блока (ИНБ) (10) и дополнительными входами универсального БПЛА-охотника (УБПЛАО) (14) последовательно соединенные двунаправленными линиями блок определения задания (БОЗ) (23) и блок наведения на узел БПЛА-нарушителя (БНУБПЛАН) (24), а также введен блок оценки выполнения задания (БОВЗ) (27), отдельным входом подключенный к дополнительному выходу блока мехатронных сеток захвата БПЛА-нарушителя (БМСЗБЛАН) (15) и дополнительным выходам вновь введенных мехатронного блока с зацепом (МБЗ) (26) и блока манипуляторов (БМ) (25), причем мехатронный блок с зацепом (МБС) (26) и блок манипуляторов (БМ) (25) соединены двунаправленными линиями с отдельными входами и выходами с универсальным БПЛА-охотником (УБПЛАО) (14).
2. Универсальный комплекс по п. 1, отличающийся тем, что упомянутый универсальный БПЛА-охотник (14) оснащен мехатронным блоком с зацепом (МБЗ) (26), содержащим карбоновую трубку (КТ) (28), сложенный парашют (СП) (29), стропы парашюта (СП) (30), пробку-предохранитель (ПП) (31), тонкий карбоновый стержень (ТКС) (32) и стальной зацеп (СЗ) (33), выполненный в виде одного крючка, трех крючков или многочисленных крючков.
3. Универсальный комплекс по п. 1, отличающийся тем, что упомянутый блок манипуляторов (25) содержит следующие последовательно соединенные двунаправленными линиями узел крепления к БПЛА-охотнику (34), трехмерный каркас (35), мехатронный блок управления (МБУ) (36) и блок штырей (37), подключенный двунаправленными линиями к трехмерному каркасу (35).
4. Универсальный комплекс по п. 3, отличающийся тем, что трехмерный каркас (35) выполнен в виде круглого обода (39), соединенного двумя полуободами (38), на пересечении соединений которых размещен узел крепления к БПЛА-охотнику (34), причем штыри блока штырей (37) крепятся к ободу (39) мехатронным блоком управления (МБУ) (36), который также управляет выдвижением штырей блока штырей (37).
5. Универсальный комплекс по п. 1, отличающийся тем, что блок оценки выполнения задания (БОВЗ) (27) содержит интерфейс (40), процессор (41), блок памяти (БП) (42), 3D цветную видеокамеру (3DЦB) (43), прибор ночного видения (ПНВ) (44) и тепловизор (45), причем при сравнении текущего изображения (ТИ) и эталонного изображения (ЭИ) используется корреляционный, нейро-нечеткий и структурный анализ.
6. Универсальный комплекс по п. 1, отличающийся тем, что блок определения задания (БОЗ) (23) выполнен в виде анализатора и формирователя задания, причем БОЗ (23), анализируя информацию о БПЛА-нарушителе (16), а именно: тип, геометрия, цвет, координаты, скорость и высота полета, синтезирует задание для блока наведения на узел БПЛА-нарушителя (24).
7. Универсальный комплекс по п. 1, отличающийся тем, что блок наведения на узел БПЛА-нарушителя (БНУБПЛАН) (24) содержит считыватель и анализатор информации, определитель координаты, причем для работы БНУБПЛАН (24) применяются корреляционный, нейро-нечеткий и структурный анализ для распознавания изображений.
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2574224C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2534217C1 |
| СИСТЕМА УПРАВЛЕНИЯ КОМПЛЕКСНЫМИ МЕТОДАМИ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2014 |
|
RU2578524C2 |
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
| EP 3690383 A1, 05.08.2020. | |||

