Изобретение относится к способам и устройствам обнаружения и обезвреживания малогабаритных беспилотных летательных аппаратов (МБПЛА), а также беспилотных и пилотных наземных аппаратов (БПНА).
Известны и широко применяются различные активные и пассивные способы и устройства обнаружения и обезвреживания МБПЛА, БПНА, попавших в охраняемую зону [1, 2].
Недостатки известных устройств заключаются в ограниченных функциональных возможностях, отсутствии мобильности, невозможности обезвреживания (устранения) и транспортировки беспилотных летательных аппаратов (БПЛА-нарушителей), попавших в охраняемую зону.
Известно также изобретение «Система управления комплексными методами борьбы с малогабаритными беспилотными летательными аппаратами», которое содержит две системы поражения, систему управления боевой частью, пакет направляющих, ракету, систему обнаружения и прицеливания, систему навигации и топопривязки, систему скрытости, систему обработки формирования команд с элементами искусственного интеллекта, БПЛА с элементами борьбы с БПЛА-нарушителем, систему электронного захвата и блок питания [3].
Недостатки системы заключаются в низкой точности определения координат местоположения объекта (транспортного наземного средства, БПЛА-нарушителя), отсутствии одновременно автоматического и автоматизированного режимов функционирования, низком быстродействии, низкой эффективности подавления БПЛА-нарушителя, малой маневренности (развертываемости) комплекса охраны и низких функциональных возможностях системы контроля охраняемой территории от всех видов БПЛА-нарушителей, обезвреживания, захвата и транспортировки в специальную зону БПЛА-нарушителей, плохой адаптации к изменяющейся ветровой обстановке.
В качестве прототипа рассмотрим изобретение «Комплекс распределенного управления интеллектуальными роботами для борьбы с малогабаритными беспилотными летательными аппаратами» [4], содержащий БПЛА-охотник, блок поиска БПЛА-нарушителя, комплект мобильных наземных роботов высокой проходимости, 3D цветную видеокамеру, направленный микрофон со встроенной видеокамерой и перестраиваемым лазером, камеру ночного видения, блок позиционирования по горизонту, блок позиционирования по наклону, интеллектуальный навигационный блок, блок управления радиоэлектронной борьбы, блок подавления сигналов управления, блок подавления сигналов навигации, блок подавления сигналов телеметрии, блок подавления видеосигнала, блок экстренной ликвидации БПЛА-нарушителя, измеритель направления и скорости ветра, универсальный пульт управления, компьютеризированный центральный пульт управления, блок памяти и блок мониторинга территории. Обеспечивается повышение эффективности борьбы с БПЛА-нарушителями.
Недостатки комплекса следующие:
1. Низкие функциональные возможности, обусловленные отсутствием устройства наземного беспилотного робота специального назначения для обезвреживания опасных объектов.
2. Низкие надежность работы и точность местоопределения устройства из-за отсутствия непрерывного автоматического контроля состояния устройства (в реальном времени).
3. Недостаточная эффективность функционирования устройства (низкая вероятность правильной работы) вследствие отсутствия всех режимов управления: ручного, автоматизированного и автоматического.
Задачей является создание комплекса распределенного управления интеллектуальными роботами для борьбы с беспилотными аппаратами с расширенными функциональными возможностями, за счет обезвреживания БПЛА и БПНА, высокими надежностью работы путем введения автоматического контроля состояния комплексов и точностью местоопределения устройств комплекса и высокой эффективностью работы вследствие использования ручного, автоматизированного и автоматического режимов управления.
Поставленная задача достигается тем, что, как и прототип, заявлен комплекс распределенного управления интеллектуальными роботами для борьбы с беспилотными аппаратами, содержит мобильный наземный робот высокой проходимости (1), а также блок поиска БПЛА-нарушителя (2), тепловизор (3), интеллектуальный распознаватель (4), 3D цветная видеокамера (5), направленный микрофон со встроенной видеокамерой изменяемого увеличения и перестраиваемым лазером (6), камера ночного видения (7), блок позиционирования по горизонту (8), блок позиционирования по наклону (9), интеллектуальный навигационный блок (10), блок управления радиоэлектронной борьбы (11), блок подавления сигналов управления (12), блок подавления сигналов навигации (13), блок подавления сигналов телеметрии (14), блок подавления видеосигнала (15), блок экстренной ликвидации БПЛА-нарушителя (16), БПЛА-охотник (17), БПЛА-нарушитель (18), блок мехатронных сеток захвата БПЛА-нарушителя с обручем (19), измеритель направления и скорости ветра (20), универсальный пульт управления (21), компьютеризированный центральный пульт управления (22), космический спутник (23), блок памяти (24), универсальный блок питания (25), блок мониторинга территорий (26).
Новым является то, что в комплекс введены между дополнительными входом и выходом мобильный наземный робот высокой проходимости (1) и дополнительными входом и выходом компьютеризированного центрального пульта управления (22) включена последовательная цепь, соединенная входами и выходами с роботом-камикадзе (27), анализатором состояния комплекса (28) и блоком эталонной информации (29), кроме этого, дополнительно введены подключенные входами и выходами к универсальному пульту управления (21) блок выбора схемы функционирования (30), интернет-схема управления (31), микропроцессорная схема управления (32), релейная схема управления (33), оптическая схема управления (34) и блок эталонной информации (29); также дополнительно введен цифровой двойник (35), подключенный входом и выходом к отдельным входам и выходам анализатора состояния комплекса (28), причем другие отдельный входы и выходы цифрового двойника (35) и анализатора состояния комплекса (28) подключены к другим отдельным входам и выходам компьютеризированного центрального пульта управления (22).
Кроме того, упомянутый робот-камикадзе (27) содержит подвижную платформу (36), цифровую систему анализа информации и управления роботом (37), систему ликвидации опасных объектов (38) и блок электропитания (39).
Кроме того, упомянутая подвижная платформа (36), включает каркас-раму (40), левое гусеничное шасси (41), правое гусеничное шасси (42), первый электродвигатель (43), второй электродвигатель (44), силовой блок двигателей (45), дешифратор управляющих команд движения (46), управляющий контроллер движения (47), блок формирования команд управления подвижной платформы (48), гироскопы крена и тангажа (49), цифровой радиомодем (50), блок цифровой информации (51), блок защиты от РЭБ (52), управляющий микроконтроллер (53), автопилот (54), приемник GPS/ГЛОНАСС (55), тепловизор (3), 3D цветная видеокамера (5).
Кроме того, упомянутая релейная схема управления (33) роботом-камикадзе (27) содержит релейный блок управления (56), первый видеоусилитель сигналов (57), многожильный кабель (58), катушку многожильного кабеля (59), механизм упорядочивания разметки кабеля (60), блок управления упорядочиванием размотки кабеля (61), второй видеоусилитель сигналов (62).
Кроме того, упомянутая микропроцессорная схема управления состоит из микропроцессорной схемы кодирования-декодирования (63), третьего видеоусилителя сигналов (64), кабеля с минимальным количеством жил (65), микропроцессорного блока управления упорядочиванием размотки кабеля (66), катушки с механизмом упорядочивания размотки кабеля (67), четвертого видеоусилителя сигналов (68).
Кроме того, упомянутая выше оптическая схема управления (34) (роботом камикадзе (27)) включает сканирующий лазер (69), шифратор-дешифратор (70).
Кроме того, упомянутый выше анализатор состояния комплекса (28) содержит блок оценки работоспособности (71), средства тестового контроля и диагностики (72), комплекс, блоки комплекса (73). Кроме того, упомянутый выше цифровой двойник (35) включает универсальный анализатор многомерных данных на основе нейро-нечетких методов глубокого обучения (74), блока анализа и прогноза (75), вычислителя искусственного интеллекта на основе биолого-электрической модели человеческого мозга (76), интерфейса (77).
Кроме того, упомянутая выше система ликвидации опасных объектов (38), включает контроллер управления оборудованием обезвреживания (78), блок подготовки и запуска робота-камикадзе (79), электронно-механическую систему выбора оборудования обезвреживания (80), блок запуска оборудования обезвреживания (81).
Предлагаемый комплекс (устройство) иллюстрируется чертежами, представленными на Фиг. 1-11
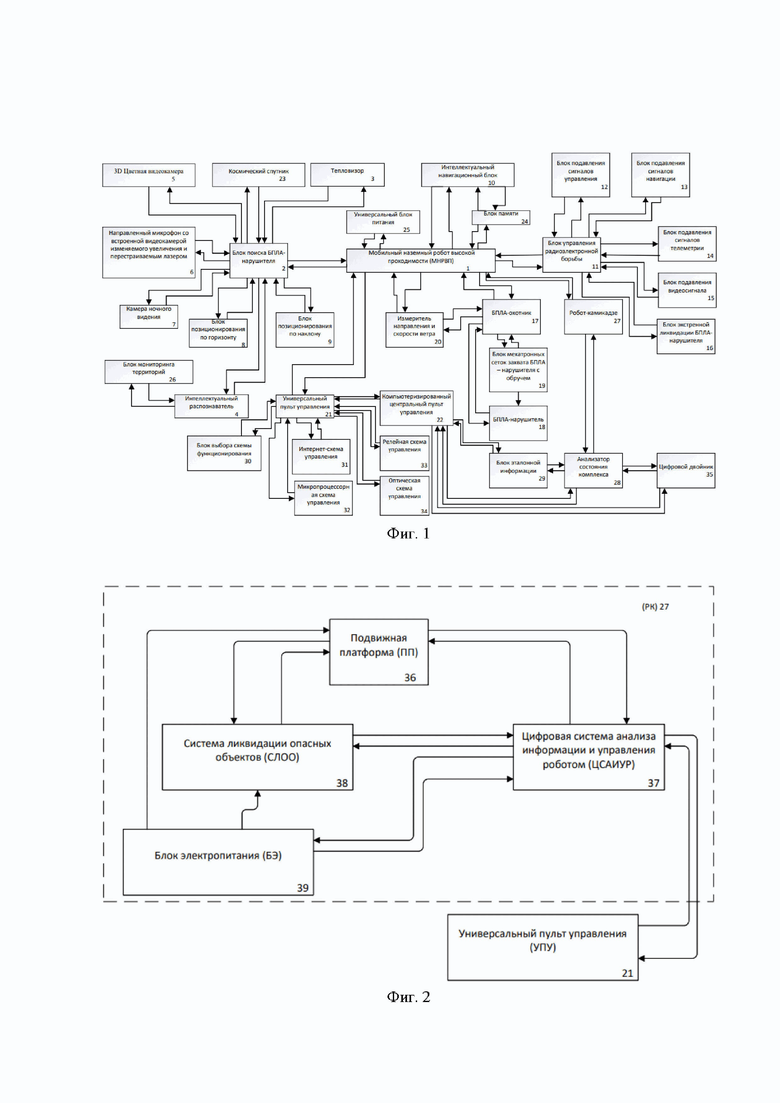
На Фиг. 1 представлена структурная схема комплекса (устройства).
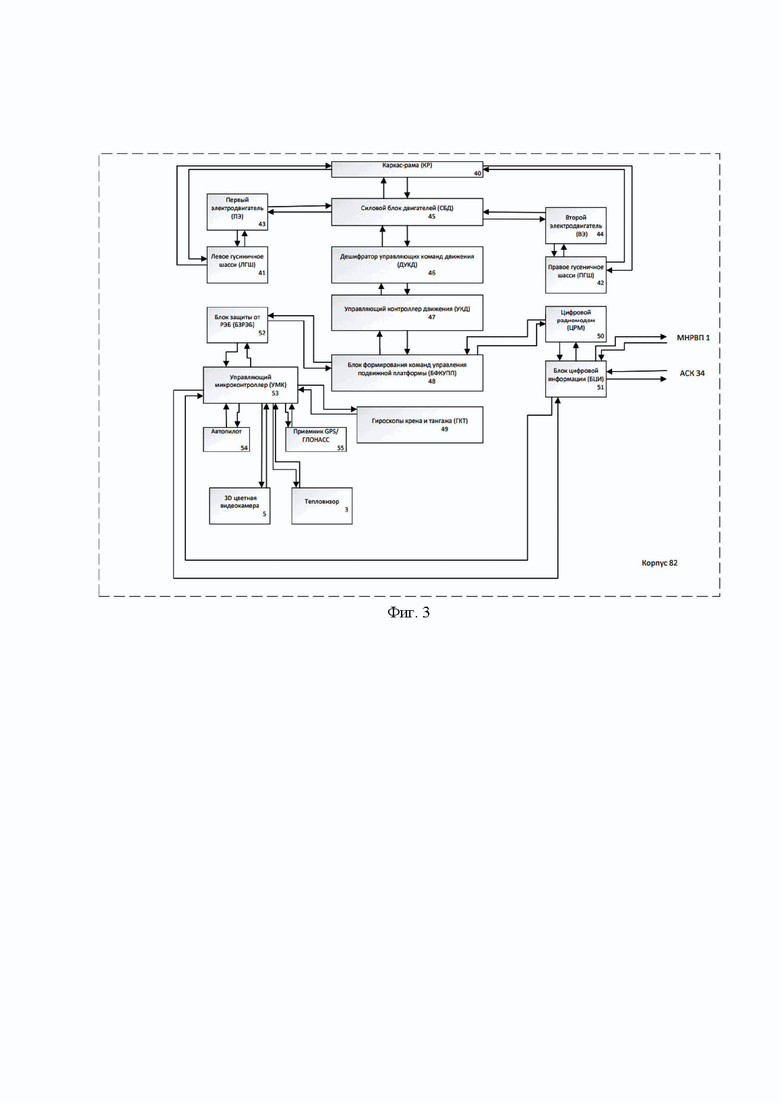
На Фиг. 2 дана структурная схема наземного робота-камикадзе.
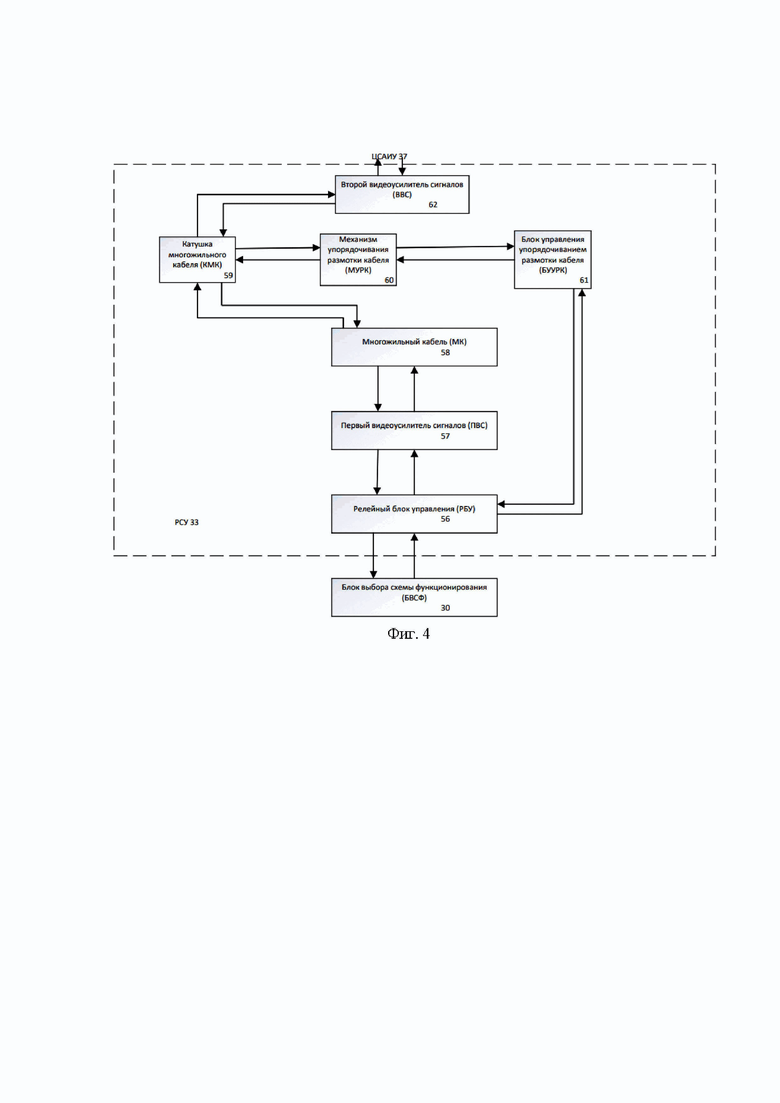
На Фиг. 3 показана структурная схема подвижной платформы.
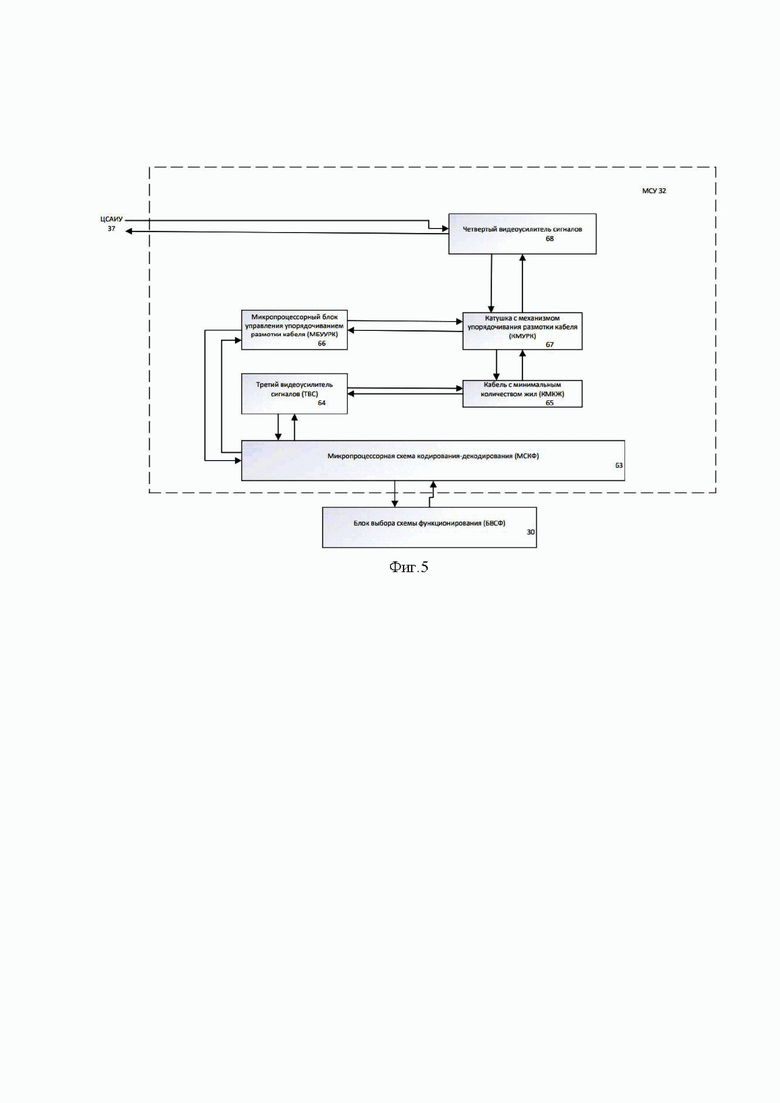
На Фиг. 4 изображена структурная схема релейного управления роботом-камикадзе.
На Фиг. 5 представлена структурная схема микропроцессорного управления роботом-камикадзе.
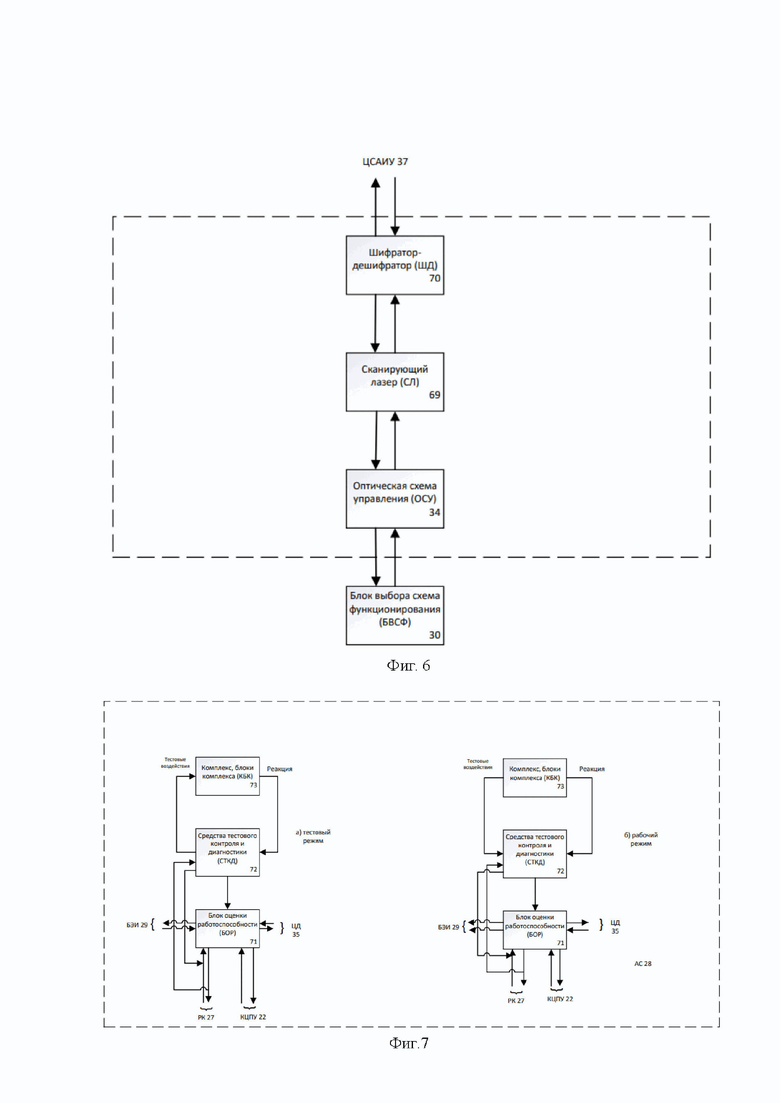
На Фиг. 6 дана структурная схема оптического управления роботом-камикадзе.
На Фиг. 7 показана структурная схема анализатора состояния комплекса.
На Фиг. 8 представлена структурная схема цифрового двойника комплекса.
На Фиг. 9 дана структурная схема системы ликвидации опасных объектов.
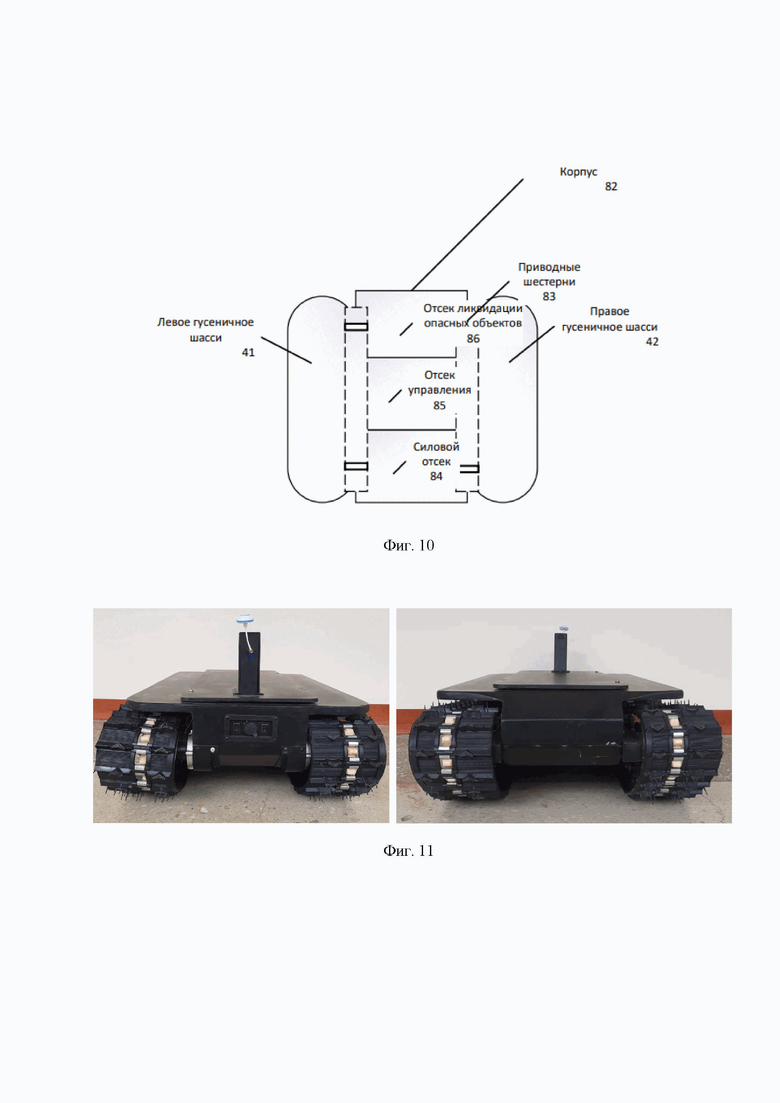
На Фиг. 10 изображена схема расположения блоков наземного робота-камикадзе.
На Фиг. 11 представлены фото (а,б) внешнего вида наземного робота-камикадзе.
Структурная схема комплекса (Фиг. 1) включает следующие приборы и блоки:
1 - мобильный наземный робот высокой проходимости;
2 - блок поиска БПЛА-нарушителя;
3 - тепловизор;
4 - интеллектуальный распознаватель;
5 - 3D цветная видеокамера;
6 - направленный микрофон со встроенной видеокамерой изменяемого увеличения и перестраиваемым лазером;
7 - камера ночного видения;
8 - блок позиционирования по горизонту;
9 - блок позиционирования по наклону;
10 - интеллектуальный навигационный блок;
11 - блок управления радиоэлектронной борьбы;
12 - блок подавления сигналов управления;
13 - блок подавления сигналов навигации;
14 - блок подавления сигналов телеметрии;
15 - блок подавления видеосигнала;
16 - блок экстренной ликвидации БПЛА-нарушителя;
17 - БПЛА-охотник;
18 - БПЛА-нарушитель;
19 - блок мехатронных сеток захвата БПЛА-нарушителя с обручем;
20 - измеритель направления и скорости ветра;
21 - универсальный пульт управления;
22 - компьютеризированный центральный пульт управления;
23 - космический спутник;
24 - блок памяти;
25 - универсальный блок питания;
26 - блок мониторинга территории;
27 - робот-камикадзе;
28 - анализатор состояния комплекса;
29 - блок эталонной информации;
30 - блок выбора схемы функционирования;
31 - интернет-схема управления;
32 - микропроцессорная схема управления;
33 - релейная схема управления;
34 - оптическая схема управления;
35 - цифровой двойник.
Комплекс работает следующим образом:
Блок поиска БПЛА-нарушителя связан отдельными двунаправленными линиями связи с тепловизором, интеллектуальным распознавателем, 3D цветной видеокамерой, направленным микрофоном со встроенной видеокамерой изменяемого увеличения и перестраиваемый лазер, камерой ночного видения, блоком позиционирования по горизонту, блоком позиционирования по наклону и космическим спутником и обнаруживает нарушителя. Блок управления радиоэлектронной борьбы подключен отдельными связями к блоку подавления сигналов управления, блоку подавления сигналов навигации, блоку подавления сигналов телеметрии, блоку подавления видеосигнала и блоку экстренной ликвидации БПЛА-нарушителя, благодаря чему может нарушать траекторию движения нарушителя, а при сближении с ним подавать сигнал на блок мехатронных сеток с целью захвата БПЛА-нарушителя, или подавать сигнал на робот-камикадзе для обезвреживания наземного нарушителя.
Комплекс функционирует в четырех режимах:
Режим 1 - подготовка к работе (формирование эталонной информации и эталонного изображения ЭИ, выполнение тестовых операций);
Режим 2 - дежурство, а в случае появления БПЛА-нарушителя формирование программы работы;
Режим 3 - нейтрализация (уничтожение или захват) БПЛА-нарушителей;
Режим 4 - транспортировка БПЛА-нарушителя в заданную зону.
В первом режиме функционирования предлагаемого комплекса по периметру охраняемой зоны разворачиваются до 10 комплектов устройств (до 10 мобильных наземных роботов высокой проходимости, по 5 БПЛА-охотников и по 3 робота-камикадзе всего до 80 БПЛА-охотник). Затем в тестовом режиме проверяется работа приборов и блоков комплекса. От космического спутника (23), 3D цветной видеокамеры (5), измерителя направления и скорости ветра (20) и интеллектуального навигационного блока (10) воспринимается и записывается в блок памяти (24) эталонная информация (пространственное состояние охраняемой территории), эталонное изображение местности, текущие координаты устройств, погодные условия (время суток, скорость и направление ветра, температура воздуха). С помощью анализатора состояния комплекса (28) и цифрового двойника (35) оцениваются состояние работоспособности комплекса, а также прогноз функционирования комплекса в режимах 2,3,4 его работы.
Во втором режиме функционируют мобильный наземный робот высокой проходимости (1), космический спутник (23), интеллектуальный навигационный блок (10), тепловизор (3), интеллектуальный распознаватель (4), 3D цветная видеокамера (5), блок поиска БПЛА-нарушителя (2), направленный микрофон со встроенной видеокамерой изменяемого увеличения и перестраиваемым лазером (6), камера ночного видения (7), блок позиционирования по горизонту (8), блок позиционирования по наклону (9), блок памяти (24), измеритель направления и скорости ветра (20), универсальный пульт управления (21) и компьютеризированный центральный пульт управления (22). Направленный микрофон со встроенной видеокамерой изменяемого увеличения и перестраиваемым лазером (6) имеет усилитель и микроконтроллер для выделения гармонических сигналов в заданном частотном диапазоне, что позволяет обнаружить БПЛА-нарушитель в любое время суток на расстоянии до 500 метров. Одновременно с направленным микрофоном со встроенной видеокамерой изменяемого увеличения и перестраиваемым лазером (6) функционирует космический спутник (23), воспринимающий (считывающий) информацию об охраняемой территории. Тепловую информацию о БПЛА-нарушителей получает тепловизор (3), который фиксирует точечный элемент БПЛА-нарушителей с повышенной температурой (регуляторы и двигатели БПЛА-нарушителя в процессе работы нагреваются). Кроме того, камера ночного видения (7) имеет систему автоматического слежения и ведет визуальное наблюдение за БПЛА-нарушителем в ночное время. Объемная и цветная информация воспринимается 3D цветной видеокамерой (5). Кроме того, перестраиваемый лазер высвечивает бесшумные, но объемные БПЛА (планеры, воздушные шары). В случае обнаружения БПЛА-нарушителя перечисленными приборами (тепловизором (3), - космическим спутником (23), интеллектуальным распознавателем (4), 3D цветной видеокамерой (5), направленным микрофоном со встроенной видеокамерой изменяемого увеличения и перестраиваемым лазером (6), камерой ночного видения (7) заявленный комплекс распределенного управления переходит в третий режим функционирования (при этом блок позиционирования по горизонту (8) отслеживает горизонтальное положение БПЛА-нарушителя, а блок позиционирования по наклону (9) отслеживает его положение в вертикальной плоскости), т.е. происходит позиционирование платформы с приборами (3, 5, 6, 7) в горизонтальной плоскости на угол +/- 90 градусов с углом наклона по горизонту до 45 градусов. Таким образом, в этом режиме путем комплексной системы слежения возможно обнаружение любого БПЛА (мультикоптера, вертолета, планера, шара). В этом режиме работает также блок выбора схемы функционирования (30), который анализирует внешнюю информацию, получаемую через универсальный пульт управления (21) от тепловизора (3), камеры ночного видения (7), 3D цветной видеокамеры (5) и направленного микрофона со встроенной видеокамерой изменяемого увеличения и перестраиваемым лазером (6).
В третьем режиме (нейтрализация БПЛА-нарушителя, беспилотного наземного нарушителя) при получении информации с любого датчика происходит переключение скорости позиционирования блока поиска на малую скорость, включается блок позиционирования по горизонту (8), определяется максимальная амплитуда выходного сигнала и определяется направление и высота полета БПЛА-нарушителя (временные затраты на данные операции не более 2 секунд). Данные передаются по цифровому каналу связи на компьютеризированный центральный пульт управления (22) для принятия решения о нейтрализации БПЛА-нарушителя. Включается блок выбора схемы функционирования (30), производится готовность к работе интернет-схемы управления (31), релейной схемы управления (33), микропроцессорной схемы управления (32), оптической схемы управления (34), блока эталонной информации (29), анализатора состояния комплекса (28) и цифрового двойника (35). Все полученные данные записываются в блок памяти (24) и на электронный диск компьютеризированный центральный пульт управления (22) для последующего разбора правильности выполнения команд другими блоками комплекса и правильности действий оператора.
Последний этап третьего режима функционирования комплекса: включаются блок управления радиоэлектронной борьбы (11), блок подавления сигналов управления (12), блок подавления сигналов навигации (13), блок подавления сигналов телеметрии (14), блок подавления видеосигнала (15) и блок экстренной ликвидации БПЛА-нарушителя (16). Блок управления радиоэлектронной борьбы (11) управляет нейтрализацией БПЛА-нарушителя радиоэлектронными методами. Блок подавления сигналов управления (12) подавляет управляющие сигналы БПЛА-нарушителя при ручном управлении или при передаче сигналов телеметрии. Блок подавления сигналов навигации (13) искажает показания всех навигационных систем и делает невозможным полет БПЛА-нарушителя по заданной программе. Блок подавления видеосигнала (15) подавляет видеосигналы от всех бортовых видеокамер (тепловизор, камера ночного видения, 3D цветная видеокамера и др.) БПЛА-нарушителя. Подавление сигналов и искажение информации происходит при работе блока управления радиоэлектронной борьбы (11), он управляет блоком подавления сигналов управления (12), блоком подавления сигналов навигации (13), блоком подавления сигналов телеметрии (14) и блоком подавления видеосигнала (15) для подавления всех возможных сигналов БПЛА-нарушителя, генерирующих до 12 радиочастот, например, частота 2,3-2,5 ГГц (при ручном управлении БПЛА-нарушителем), частота 433 МГц (при использовании модема телеметрии), частота 1,6-1,8 ГГц (управлении от космического спутника), частота 5, 8 ГГц (работа видеокамер БПЛА-нарушителя). В результате БПЛА-нарушители либо «зависают» на большой высоте (мультикоптеры), либо падают на земную поверхность (мультикоптеры, дроны с крыльями). Одновременно с этим вышеописанными операциями работают роботы-камикадзе (27), которые обезвреживают наземные беспилотные и пилотные аппараты и другие опасные объекты. Блок выбора схемы функционирования (30) выбирает необходимый для использования прибор (интернет-схема управления (31), релейная схема управления (33), микропроцессорная схема управления (32), оптическая схема управления (34), блок эталонной информации (29), анализатор состояния комплекса (28) или цифровой двойник (35)).
Следует отметить, что автоматически выбирается необходимая схема функционирования (управления), определяемая следующими условиями:
1) если имеется повышенная радиация, химическая зараженность территории и сильные средства радиоэлектронной борьбы, то используется релейная схема управления (33);
2) если отсутствуют опасные условия, перечисленные выше в п.1, но имеются незначительные сигналы электронной помехи, например, из-за противодействия противника, то применяется микропроцессорная схема управления (32);
3) если имеются одновременно опасности, указанные выше в п.п. 1, 2, 3, то используется оптическая схема управления (34), которая не зависит от этих опасных факторов;
4) если отсутствуют опасности, указанные выше в п.п. 1, 2, 3, то применяется интернет-схема управления (31).
В результате применения перечисленных схем управления обезвреживания роботом-камикадзе (27) устраняется опасный объект.
В четвертом режиме работы предлагаемого комплекса происходит захват и транспортировка БПЛА-нарушителей мобильным наземным роботом высокой проходимости (1) в заданное место. При обнаружении мобильным наземным роботом высокой проходимости БПЛА-нарушителя координаты нарушителей вводятся в процессор БПЛА-охотников (17), они стартуют с мобильного наземного робота высокой проходимости (1) и летят в сторону БПЛА-нарушителей. Стартующие БПЛА-охотники (17) разделяются на две группы: первая группа перемещается к БПЛА-нарушителям, которые находятся в пространстве, а вторая группа БПЛА-охотников перемещается к БПЛА-нарушителям, упавшим на земную поверхность. После электронного захвата и идентификации БПЛА-охотником (17) БПЛА-нарушителя, бортовой вычислительный комплекс БПЛА-охотника передает сигнал об этом на мобильный наземный робот высокой проходимости (1) и на компьютеризированный центральный пульт управления (22), которые включают (в случае необходимости) повторные операции блокирования (подавления) сигналов управления БПЛА-нарушителей.
Далее происходит сближение БПЛА-охотников (17) и БПЛА-нарушителей по сигналам бортовой телеметрии БПЛА-охотников (17), не используя внешнее управление и навигацию. При подлете к БПЛА-нарушителям у БПЛА-охотников (17) блок мехатронных сеток захвата БПЛА-нарушителя с обручем (19) выпускает сетки, которые окутывают БПЛА-нарушителей [1-3]. После захвата БПЛА-нарушителей компьютеризированный центральный пульт управления (22) (или непосредственно мобильный наземный робот высокой проходимости (1)) выключает аппаратуру радиоэлектронной борьбы (блоки 11-16) и БПЛА-охотник (17) продолжает управляемый полет на базу с захваченным БПЛА-нарушителем.
Универсальный блок питания (25), осуществляющий электропитание предлагаемого комплекса (кроме БПЛА-охотников (17), имеющих автономное питание), состоит из аккумулятора, блока подзарядки на основе солнечной батареи и ветряного миниэнергоблока.
На самом БПЛА-охотнике (17) блок мехатронных сеток захвата БПЛА-нарушителя с обручем (19) целесообразно закрепить по периметру круга, образующего посадочную платформу шасси. Сама сетка имеет форму цилиндра с сужением на конце и с закрепленным грузом. Ввиду симметричности данная сетка наиболее стабильна в полете. На начальном этапе полета сетка с обручем размещается в специальном контейнере на шасси, сетка выбрасывается при подлете к нарушителю по команде оператора или полетного контроллера. Если вес нарушителя превышает грузоподъемность дрона, шасси имеет механизм расстыковки, который отсоединяет средство захвата, и нарушитель вместе с сеткой и обручем падает на землю. Сетка может быть в виде крупной ячеистой сети типа рыболовной, или в виде металлической сетки, и может быть оборудована парашютом. Блок мехатронных сеток захвата БПЛА-нарушителя с обручем (19) может содержать несколько сеток.
На Фиг. 2 представлена структурная схема робота-камикадзе, которая включает следующие системы и блоки:
36 - подвижная платформа;
38 - система ликвидации опасных объектов;
37 - цифровая система анализа информации и управления роботом;
39 - блок электропитания;
21 - универсальный пульт управления.
Робот-камикадзе (27) функционирует следующим образом: цифровая система анализа информации и управления роботом (37) воспринимает информацию от универсального пульта управления (21) и управляет подвижной платформой (36) и системой ликвидации опасных объектов (38), включаемой при необходимости устранения опасных объектов. При этом блок электропитания (39) обеспечивает необходимое питание подвижной платформе (36), системы ликвидации опасных объектов (38) и цифровой системы анализа информации и управления роботом (37).
На Фиг.3 дана структурная схема подвижной платформы, состоящей из следующих блоков:
40 - каркас-рама;
82 - корпус;
45 - силовой блок двигателей;
43 - первый электродвигатель;
44 - второй электродвигатель;
41 - левое гусеничное шасси;
42 - правое гусеничное шасси;
46 - дешифратор управляющих команд движения;
47 - управляющий контроллер движения;
48 - блок формирования команд управления подвижной платформы;
50 - цифровой радиомодем;
51 - блок цифровой информации;
52 - блок защиты от РЭБ;
53 - управляющий микроконтроллер;
54 - автопилот;
55 - приемник GPS/ГЛОНАСС;
49 - гироскоп крена и тангажа;
5 - 3D цветная видеокамера;
3 - тепловизор.
В соответствии со структурной схемой (см. Фиг. 2) робот-камикадзе (27) содержит блоки (40-49), расположенные и функционирующие следующим образом: на каркасе-раме (40) размещаются силовой блок двигателей (45), первый блок двигателей (43), второй электродвигатель (44), силовой блок двигателей (45), левое гусеничное шасси (41) и правое гусеничное шасси (42). Управляет движением робота-камикадзе (РК) (27) блок формирования команд управления подвижной платформы (48) через управляющего контроллера движения (47), дешифратора управляющих команд движения (46), силовой блок двигателей (45), первого и второго электродвигателей (43, 44) левым гусеничным шасси (41) и правым гусеничным шасси (42). Остановка и повороты робота-камикадзе (27) осуществляется остановкой или соответствующим включением левого гусеничного шасси (41) и правого гусеничного шасси (42). Внешняя информация об окружающей среде воспринимается тепловизором (3) и 3D цветной видеокамерой (5) и обрабатывается управляющим микроконтроллером (53), который также анализирует информацию от автопилота (54), приемником GPS/ГЛОНАСС (55) и гироскопов крена и тангажа (49). Навигационные параметры от управляющего микроконтроллера (53) используются блоком цифровой информации (51) и цифровым радиомодемом (50) для управления через блок формирования команд управления подвижной платформы (48) роботом-камикадзе (27). Блок защиты от РЭБ (52) обеспечивает электронную безопасность робота-камикадзе (27). Следует отметить, что цифровой радиомодем (50), блок цифровой информации (51), 3D цветная видеокамера (5), тепловизор (3) управляющий микроконтроллер (53), блок формирования команд управления подвижной платформы (48) и другие электронные блоки формируют цифровую систему анализа информации и управления роботом (37).
На Фиг. 4 изображена структурная схема релейного управления роботом-камикадзе, состоящая из следующих блоков:
56 - релейный блок управления;
57 - первый видеоусилитель сигналов;
58 - многожильный кабель;
59 - катушка многожильного кабеля;
60 - механизм упорядочивания размотки кабеля;
61 - блок управления упорядочиванием размотки кабеля;
62 - второй видеоусилитель сигналов;
30 - блок выбора схемы функционирования;
Управляющие сигналы о начале работы релейной схемы управления (33) поступают от блока выбора схемы функционирования (30) включающим релейный блок управления (56), который является простым электромагнитным включателем-выключателем, независимым от средств радиоэлектронной борьбы [14,15]. Сигнал от релейного блока управления (56) усиливается первым видеоусилителем сигналов (57) и передается через многожильный кабель (58) по катушке многожильного кабеля (59) и через второй видеоусилитель сигналов (62), на релейную схему управления (33). Кроме этого, релейный блок управления (56) управляет порядком размотки кабеля катушка многожильного кабеля (59), используя механизм упорядочивания размотки кабеля (60) и блок управления упорядочиванием размотки кабеля (61) [19].
На Фиг. 5 представлена структурная схема микропроцессорного управления, содержащая следующие блоки:
63 - микропроцессорная схема кодирования-декодирования;
64 - третий видеоусилитель сигналов;
65 - кабель с минимальным количеством жил;
66 - микропроцессорный блок управления упорядочиванием размотки кабеля;
67 - катушка с механизмом упорядочивания размотки кабеля;
68 - четвертый видеоусилитель сигналов;
30 - блок выбора схемы функционирования.
Микропроцессорная схема управления (32) функционирует следующим образом: отметим, что управление с использованием микропроцессорного кодирования-декодирования позволяет при минимальном количестве жил в кабеле обеспечить простую (не громоздкую) электрическую связь с блоками робота камикадзе (27).
Работа начинается по управляющим сигналам блока выбора схемы функционирования (30), по которым от микропроцессорной схемы кодирования-декодирования (63) сигналы усиливаются третьим видеоусилителем сигналов (64) и по кабелю с минимальным количеством жил (65) передаются через четвертый видеоусилитель сигналов (68) на цифровую систему анализа информации и управления роботом (37).
На Фиг. 6 дана структурная схема оптического управления содержит следующие блоки:
34 - оптическая схема управления;
69 - сканирующий лазер;
70 - шифратор-дешифратор;
30 - блок выбора схемы функционирования.
Схема оптического управления функционирует следующим образом: по сигналам от блока выбора схемы функционирования (30) включается оптическая схема управления (34), которая запускает сканирующий лазер (69), обеспечивающий сканирование (перемещение) лазерного луча. Этот лазерный луч кодируется шифратором-дешифратором (70); этим реализуется принцип кодированного передачи-приема информации. (71), сканирующий лазер (69) и шифратор-дешифратор (70).
На Фиг.7 представлена структурная схема анализатора состояния комплекса (28), состоящая из следующих блоков (имеет два режима функционирования: тестовый (а) и рабочий (б)):
71 - блок оценки работоспособности;
72 - средства тестового контроля и диагностики;
73 - комплекс, блоки комплекса
В первом режиме контроля (а) анализ состояния комплекса (блоков комплекса) осуществляется на основе специально формируемых тестовых воздействий во время функционирования комплекса (блоков комплекса) по прямому назначению [5]. В этом режиме тестовые воздействия поступаются от средства тестового контроля и диагностики (72) на комплекс, блоки комплекса (73), выходные сигналы которого (реакция) оцениваются средствами тестового контроля и диагностики (72). Затем включается блок оценки работоспособности (71), окончательно оценивающего работоспособность комплекса (блоков комплекса). Во втором режиме контроля (б) оценивается работоспособность комплекса на основании рабочих воздействий в процессе функционирования комплекса (блоков комплекса) по прямому назначению. В этом режиме рабочие воздействия поступают одновременно на входы комплекса, блоки комплекса (73) и средства тестового контроля и диагностики (72). Выходные сигналы (реакция) комплекс, блоки комплекса (73) поступают на второй вход средства тестового контроля и диагностики (72) и на другие блоки комплекса. Далее блок оценки работоспособности (71) окончательно оценивает работоспособность комплекса (блоков комплекса). при этом используется необходимая информация от цифрового двойника (35) (в режимах а), б)).
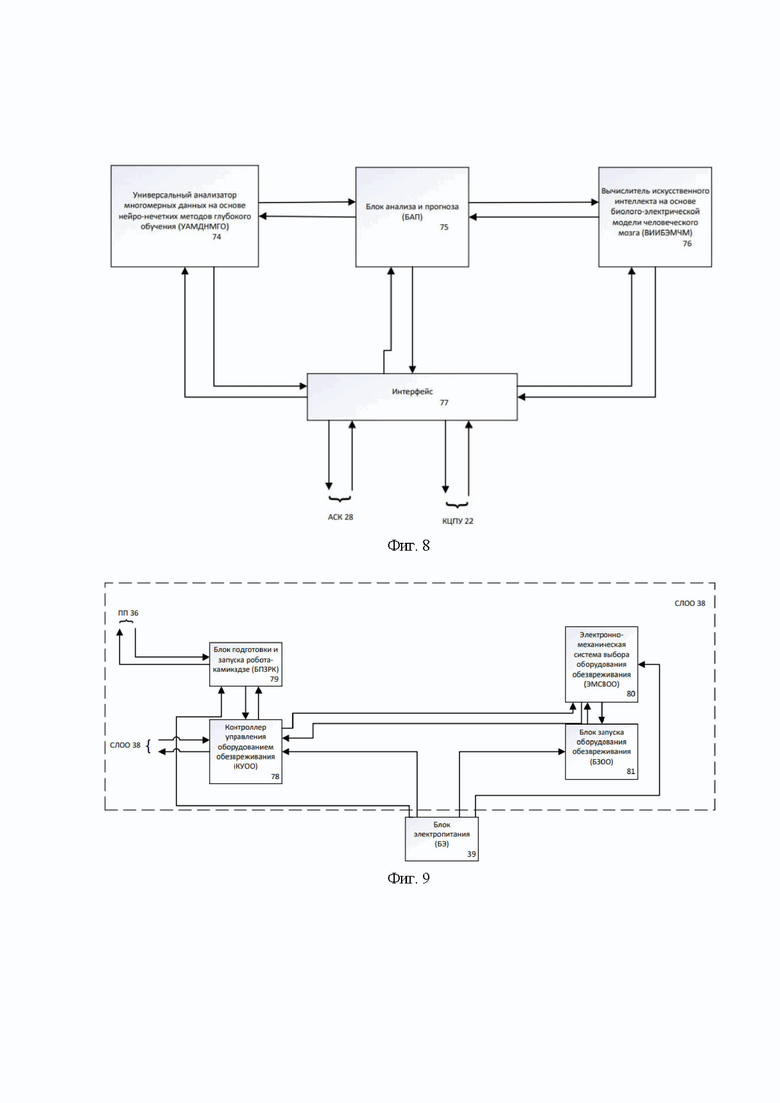
На Фиг. 8 дана структурная схема цифрового двойника (35) комплекса, которая включает следующие блоки:
77 - интерфейс;
74 - универсальный анализатор многомерных данных на основе нейро-нечетких методов глубокого обучения;
75 - блок анализа и прогноза;
76 - вычислитель искусственного интеллекта на основе биолого-электрической модели человеческого мозга.
«Цифровой двойник» (ЦД) (англ. Digital Twin) - цифровая копия физического объекта (или процесса), помогающая оптимизировать управление объекта [17,18]. Поэтому цифровой двойник предлагаемого устройства с максимальной точностью представляет в цифровом формате конфигурацию, состояние устройства на протяжении его полного режима эксплуатации. В любой момент времени идентификатор цифрового двойника коррелирует с физическим оригиналом [17,18].
Цифровой двойник (35) работает следующим образом: информация от анализатор состояния комплекса (28) и компьютеризированный центральный пульт управления (22) поступает через интерфейс (77) на универсальный анализатор многомерных данных на основе нейро-нечетких методов глубокого обучения (74), блок анализа и прогноза (75) и вычислитель искусственного интеллекта на основе биолого-электрической модели человеческого мозга (76), которые выполняют функции: универсальный анализатор многомерных данных на основе нейро-нечетких методов глубокого обучения (74) формирует на основе обучения нейро-сетевую математическую модель комплекса, совершенствуемую в процессе работы [5-7]; вычислитель искусственного интеллекта на основе биолого-электрической модели человеческого мозга (76) создает информационно-биологическую модель комплекса на основе функционирования человеческого мозга [10]; блок анализа и прогноза (75), используя информацию от универсального анализатора многомерных данных на основе нейро-нечетких методов глубокого обучения (74), вычислителя искусственного интеллекта на основе биолого-электрической модели человеческого мозга (76), а также от анализатора состояния комплекса (28) и компьютеризированного центрального пульта управления (22) (через интерфейс (77)) оценивает состояние комплекса и его прогноз работоспособности.
На Фиг. 9 представлена структурная схема системы ликвидации опасных объектов (38), включающая следующие блоки:
78 - контроллер управления оборудованием обезвреживания;
79 - блок подготовки и запуска робота-камикадзе;
80 - электронно-механическая система выбора оборудования обезвреживания;
81 - блок запуска оборудования обезвреживания.
Система ликвидации опасных объектов (38) функционирует следующим образом: на контроллер управления оборудованием обезвреживания (78) поступает информация от цифровой системы анализа информации и управления роботом (37) о состоянии окружающей среды, включая обнаружение опасных объектов. В случае опасности включается блок подготовки и запуска робота-камикадзе (79) [3,12] и электронно-механической системы выбора оборудования обезвреживания (80) [5], обеспечивающие подготовку к работе этих блоков. Далее блок запуска оборудования обезвреживания (81) запускает выбор и выполнение задачи обезвреживания опасных объектов.
На Фиг. 10 дана схема расположения блоков наземного робота-камикадзе, на которой показано: корпус (82), левое гусеничное шасси (41), правое гусеничное шасси (42), а также приводные шестерни (83), силовой отсек (84), отсек управления (85), отсек ликвидации опасных объектов (86).
На Фиг. 11 представлены фото (а, б) внешнего вида наземного робота-камикадзе.
Отметим здесь, что интернет-схема управления (31) роботом-камикадзе (27) реализована по известным классическим схемам, включая использования блока USB [5].
Предлагаемый комплекс имеет следующие преимущества по сравнению с прототипом:
1. Расширение функциональных возможностей устройства (комплекса) за счет введения автономного наземного робота-камикадзе.
2. Повышение надежности работы, и повышение точности местоопредления комплекса (устройства) вследствие введения цифрового двойника объекта и блока оценки состояния объекта.
3. Повышение эффективности работы (вероятности правильной работы) комплекса (устройства) за счет применения роботом-камикадзе режимов наведения (поиска) на опасный объект. Ручного, автоматического или автоматизированного (по кабель-каналу).
Используемые источники:
1. Способ пассивного обнаружения и определения координат малогабаритных беспилотных летательных аппаратов. Патент РФ №2574224 С1, МПК G01S 17/06 (2006/01).
2. Радиолокационный способ обнаружения малозаметных беспилотных летательных аппаратов. Патент РФ №2534217 С1, МПК G01S 13/04 (2006.01) публ. 27.11.2014, Бюл №33.
3. Система управления комплексными методами борьбы с малогабаритными беспилотными летательными аппаратами. Патент РФ №2578524 С2, МПК F41H11/02 (2006.01), Публ. 27.03.2016, Бюл. №9.
4. Комплекс распределенного управления интеллектуальными роботами для борьбы с малогабаритными беспилотными летательными аппаратами. Патент РФ № 2717047 С1, ПМК F41H 13/00 (2006.01), публ. 18.03. 2020, бюл. №8.
5. Сырямкин В.И. Информационные устройства и системы в робототехнике и мехатронике: учебное пособие. (Серия: Интеллектуальные технические системы). - 3-е изд. - Санкт-Петербург: Лань, 2023.-532с. (см. стр. 139-236, 424-432, 468-487).
6. Абрамова Т.В., Ваганова Е.В., Горбачев С.В., Сырямкин В.И., Сырямкин М.В. Нейро-нечеткие методы в интеллектуальных системах обработки и анализа многомерной информации. 2014. - 442 с. (см. стр. 9-71, 338-434).
7. Горбачев С.В., Емельянов С.Г., Жданов Д.С, Мирошниченко С.Ю., Сырямкин В.И., Титов Д.В. Цифровая обработка аэрокосмических изображений. - Томск: Изд-во Том. ун-та, 2016. - 304 с. (см. стр. 24-64, 96-211, 250-276).
8. Сырямкин В.И., Соломонов Ю.С, Соломонов Л.С.и др. Способ управления движущимся объектом и устройство для его осуществления. Патент на изобретение РФ, №2476825 от 10.03.2011. Публ. 27.02.2013. Бюл. №6.
9. Сырямкин В.И., Шидловский B.C. Корреляционно-экстремальные радионавигационные системы. Томск: Изд-во Том. ун-та, 2010. - 316 с. (см. стр. 73-183).
10. Сырямкин В.И., Шумилов В.Н. Синтез искусственного интеллекта: информационно-биологический подход. - 4-ое издание - Москва-Берлин: ООО «Директ-Медиа», 2021-228с. - ISBN 978 - 5 - 4499 - 1936 - 6.
11. Ориентация и навигация подвижных объектов: современные информационные технологии / Под ред. B.C. Алешина и др. - М.: ФИЗМАТЛИТ, 2006. - 424 с.
12. Бубенчиков М.А. и др. Современные методы исследования материалов и нанотехнологий / Под ред. д.т.н., профессора В.И. Сырямкина. - Томск: Изд-во Том. ун-та. 2010. - 366 с.
13. Богомолов Е.Н. и др. Метрология и сертификация диагностического оборудования и материалов. - Томск: Издательский Дом Томского государственного университета, 2015. - 164 с.
14. Измерители и анализаторы. [Электронный ресурс] / URL: http://www.rhbz.rti/appendices/measuring-instmments-analyzers.html.
15. 13. Все о металлоискателях и металлодетекторах. Принципы работы. Электронный ресурс URL: http://izmer-ls.ru/met/sche1-1.html.
16. Патент РФ №2661295. Устройство для определения разметки участков территории с химическим и радиоактивным заражением. Бюл. №20 от 13.07.2018 (приор. 04.07.2017).
17. Сырямкин В.И. «Цифровые двойники» 4-ой и 5-ой промышленных революций. Сб. материалов V Международного форума «Интеллектуальные системы 4-ой промышленной революции». Стр. 25-27.
18. V.I SYRYAMKIN, et al. "DESIGNING A UNIVERSAL DIGITAL TWIN OF AN OBJECT BASED ON A HYBRID NEURO-FUZZY COMPUTER." Journal of Theoretical and Applied Information Technology 101.10 (2023).
19. Мэндл М. М98 200 избранных схем электроники: Пер. с англ. 2-е изд., стереотип., - М.: Мир, 1985. - с. 350, ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| Универсальный комплекс распределенного управления интеллектуальными роботами для борьбы с малогабаритными беспилотными летательными аппаратами | 2023 |
|
RU2817740C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ И РАЗМЕТКИ УЧАСТКОВ ТЕРРИТОРИИ С ХИМИЧЕСКИМ И РАДИОАКТИВНЫМ ЗАРАЖЕНИЕМ | 2017 |
|
RU2661295C1 |
| ТРУБОПРОВОДНЫЙ ДИАГНОСТИЧЕСКИЙ РОБОТ | 2018 |
|
RU2707644C1 |
| РОБОТ ДЛЯ ДИАГНОСТИКИ И РЕМОНТА ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2019 |
|
RU2721473C1 |
| СИСТЕМА ЗАЩИТЫ ОБЪЕКТА ОТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2823195C1 |
| Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы | 2016 |
|
RU2652914C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2023 |
|
RU2822878C1 |
| МОБИЛЬНАЯ СТАНЦИЯ ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2398353C2 |
| Мобильный радиотелевизионный комплекс | 2023 |
|
RU2836656C1 |
Комплекс распределенного управления интеллектуальными роботами для борьбы с беспилотными аппаратами содержит мобильный наземный робот высокой проходимости (1), блок поиска БПЛА-нарушителя (2), тепловизор (3), интеллектуальный распознаватель (4), 3D цветную видеокамеру (5), направленный микрофон со встроенной видеокамерой изменяемого увеличения и перестраиваемым лазером (6), камеру ночного видения (7), блок позиционирования по горизонту (8), блок позиционирования по наклону (9), интеллектуальный навигационный блок (10), блок управления радиоэлектронной борьбы (11), блок подавления сигналов управления (12), блок подавления сигналов навигации (13), блок подавления сигналов телеметрии (14), блок подавления видеосигнала (15), блок экстренной ликвидации БПЛА-нарушителя (16), БПЛА-охотник (17), блок мехатронных сеток захвата БПЛА-нарушителя с обручем (19), измеритель направления и скорости ветра (20), универсальный пульт управления (21), компьютеризированный центральный пульт управления (22), блок памяти (24), универсальный блок питания (25), блок мониторинга территории (26), робот-камикадзе (27), анализатор состояния комплекса (28), блок эталонной информации (29), блок выбора схемы функционирования (30), интернет-схему управления (31), микропроцессорную схему управления (32), релейную схему управления (33), оптическую схему управления (34), цифровой двойник (35). Обеспечивается расширение функциональных возможностей за счет обезвреживания БПЛА и БПНА, повышение надежности и эффективности работы за счет использования ручного, автоматизированного и автоматического режимов управления. 8 з.п. ф-лы, 11 ил.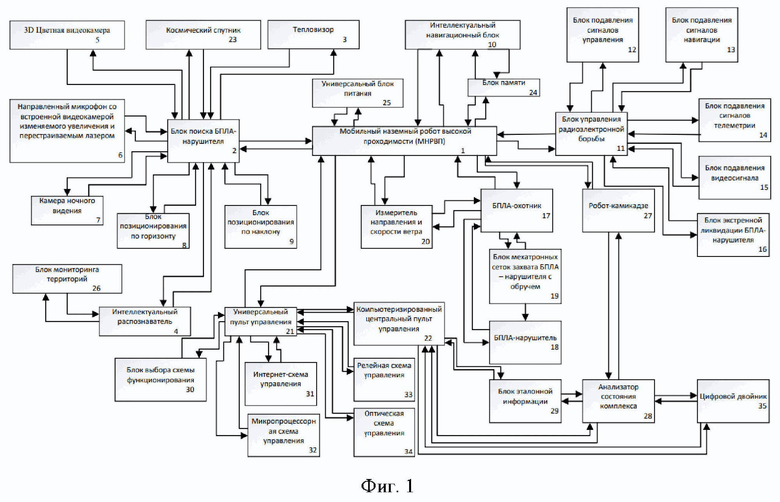
1. Комплекс распределенного управления интеллектуальными роботами для борьбы с беспилотными аппаратами содержит мобильный наземный робот высокой проходимости, а также блок поиска БПЛА-нарушителя, тепловизор, интеллектуальный распознаватель, 3D цветную видеокамеру, направленный микрофон со встроенной видеокамерой изменяемого увеличения и перестраиваемым лазером, камеру ночного видения, блок позиционирования по горизонту, блок позиционирования по наклону, интеллектуальный навигационный блок, блок управления радиоэлектронной борьбы, блок подавления сигналов управления, блок подавления сигналов навигации, блок подавления сигналов телеметрии, блок подавления видеосигнала, блок экстренной ликвидации БПЛА-нарушителя, БПЛА-охотник, БПЛА-нарушитель, блок мехатронных сеток захвата БПЛА-нарушителя с обручем, измеритель направления и скорости ветра, универсальный пульт управления, компьютеризированный центральный пульт управления, космический спутник, блок памяти, универсальный блок питания, блок мониторинга территорий, отличающийся тем, что в комплекс введены между дополнительными входом и выходом мобильный наземный робот высокой проходимости и дополнительными входом и выходом компьютеризированного центрального пульта управления включена последовательная цепь, соединенная входами и выходами с роботом-камикадзе, анализатором состояния комплекса и блоком эталонной информации, кроме этого, дополнительно введены подключенные входами и выходами к универсальному пульту управления блок выбора схемы функционирования, интернет-схема управления, микропроцессорная схема управления, релейная схема управления, оптическая схема управления и блок эталонной информации; также дополнительно введен цифровой двойник, подключенный входом и выходом к отдельным входам и выходам анализатора состояния комплекса, причем другие отдельный входы и выходы цифрового двойника и анализатора состояния комплекса подключены к другим отдельным входам и выходам компьютеризированного центрального пульта управления.
2. Комплекс по п.1, отличающийся тем, что упомянутый робот-камикадзе содержит подвижную платформу, цифровую систему анализа информации и управления роботом, систему ликвидации опасных объектов и блок электропитания.
3. Комплекс по п.1, отличающийся тем, что упомянутая подвижная платформа включает каркас-раму, левое гусеничное шасси, правое гусеничное шасси, первый электродвигатель, второй электродвигатель, силовой блок двигателей, дешифратор управляющих команд движения, управляющий контроллер движения, блок формирования команд управления подвижной платформы, гироскопы крена и тангажа, цифровой радиомодем, блок цифровой информации, блок защиты от РЭБ, управляющий микроконтроллер, автопилот, приемник GPS/ГЛОНАСС, тепловизор, 3D цветную видеокамеру.
4. Комплекс по п.1, отличающийся тем, что упомянутая релейная схема управления роботом-камикадзе содержит релейный блок управления, первый видеоусилитель сигналов, многожильный кабель, катушку многожильного кабеля, механизм упорядочивания разметки кабеля, блок управления упорядочиванием размотки кабеля, второй видеоусилитель сигналов.
5. Комплекс по п.1, отличающийся тем, что упомянутая микропроцессорная схема управления состоит из микропроцессорной схемы кодирования-декодирования, третьего видеоусилителя сигналов, кабеля с минимальным количеством жил, микропроцессорного блока управления упорядочиванием размотки кабеля, катушки с механизмом упорядочивания размотки кабеля, четвертого видеоусилителя сигналов.
6. Комплекс по п.1, отличающийся тем, что упомянутая оптическая схема управления (роботом камикадзе) включает сканирующий лазер, шифратор-дешифратор.
7. Комплекс по п.1, отличающийся тем, что упомянутый анализатор состояния комплекса содержит блок оценки работоспособности, средства тестового контроля и диагностики, комплекс, блоки комплекса.
8. Комплекс по п.1, отличающийся тем, что упомянутый цифровой двойник включает универсальный анализатор многомерных данных на основе нейронечетких методов глубокого обучения, блока анализа и прогноза, вычислителя искусственного интеллекта на основе биолого-электрической модели человеческого мозга, интерфейса.
9. Комплекс по п.1, отличающийся тем, что упомянутая система ликвидации опасных объектов включает контроллер управления оборудованием обезвреживания, блок подготовки и запуска робота-камикадзе, электронно-механическую систему выбора оборудования обезвреживания, блок запуска оборудования обезвреживания.
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
| Универсальный комплекс распределенного управления интеллектуальными роботами для борьбы с малогабаритными беспилотными летательными аппаратами | 2023 |
|
RU2817740C1 |
| US 10877125 B1, 29.12.2020 | |||
| US 20240142996 A1, 02.05.2024 | |||
| US 20170261613 A1, 14.09.2017. | |||

