ОБЛАСТЬ ТЕХНИКИ
Группа изобретений относится к области металлургии и электротехники, в частности к способам и устройствам для силового воздействия продольным бегущим магнитным полем на расплавы металла и может быть использована для перемешивания расплавов металлов с целью повышения скорости плавления твердой шихты, выравнивания химического состава и температуры по всему объему расплава, а также для электромагнитного перемешивания жидкой фазы слитка в процессе ее кристаллизации.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Из уровня техники известны способы и устройства для перемешивания расплава металла. Известна низкочастотная линейная индукционная машина для воздействия бегущим магнитным полем на расплавы металлов в сталеплавильных печах (Вольдек А.И. Индукционные магнитогидродинамические машины с жидкометаллическим рабочим телом. Л.: Энергия, 1970. – с. 152-153). Указанная машина содержит двухфазную обмотку, которая помещена на гладкой поверхности индуктора с отгибом лобовых частей на боковые поверхности сердечника, а с целью выравнивания индуктивных сопротивлений фаз число витков во 2-ой фазе берут на 25-30 % меньше, чем в 1-ой фазе. Обмотки выполнены из медных трубок и имеют водяное охлаждение. В процессе эксплуатации обмотки сердечника при питании переменным напряжением низкой частоты создают переменное бегущее магнитное поле, которое индуктирует в расплаве металла, находящегося в резервуаре, токи. Возникающие в результате взаимодействия индуктированных токов с магнитным полем электромагнитные силы действуют на расплав металла, перемешивая его.
Недостатком известного устройства для перемешивания расплава металла является высокие масса и габариты, сложность его изготовления. Необходимость применения медных водоохлаждаемых трубок большого сечения, способных работать при больших значениях рабочего тока и малых напряжениях, связана со сложностью изготовления обмоток с отгибом лобовых частей на боковые поверхности сердечника и отсутствием возможности рационального согласования индуктора с источником питания по напряжению из-за роста гидравлического сопротивления охлаждающей витки воды при увеличении числа витков из водоохлаждаемых проводников, потребностью обеспечения надежности многочисленных паяных соединений и сложностью крепления катушки на гладкой поверхности индуктора. В результате индукторы с водяным охлаждением многофазной обмотки имеют высокие токи и низкое напряжение, что требует применения специализированных источников питания высокой мощности.
Известно устройство для перемешивания расплава металла, включающее сердечник и размещенные на нем двухфазные обмотки (m=2) в виде концентрических катушек плоской формы (авт.свид. SU180248, приор. 20.11.1965, H02К). При этом катушки каждой фазы образуют один слой. Обмотка размещена таким образом, что число пар ее полюсов соответствует 2 (2р=2), число зубцов сердечника Z=16, число пазов на полюс и фазу q=4, а ширина фазной зоны α=90°эл. В процессе работы устройство устанавливают на расстоянии от резервуара с расплавом металла с образованием рабочего зазора Δ между поверхностью устройства и поверхностью перемешиваемого расплава металла. Затем подают питание на обмотки сердечника, в результате чего создается магнитное поле, которое индуктирует в расплаве металла, находящегося в резервуаре, токи. Возникающие в результате взаимодействия индуктированных токов с магнитным полем электромагнитные силы действуют на расплав металла, перемешивая его.
Однако описанное устройство имеет низкую эффективность, обусловленную высоким числом пар магнитных полюсов на длину, низким полюсным делением индуктора и, следовательно, невозможностью работы с увеличенным рабочим зазором Δ, в котором размещены огнеупорный бетон и теплоизоляция совокупной толщиной не менее 500 мм для сохранения тепловой энергии расплавом, а в отдельных случаях, при повышенных требованиях к механической прочности огнеупорного бетона, толщиной до 700 мм.
Известен плоский индуктор коллекторной машины Шербиуса, применяемый в устройствах для перемешивания расплава металла, содержащий сердечник со множеством зубцов и размещенные в пазах между указанными зубцами в один или два слоя плоские катушки (Вольдек А.И. Индукционные магнитогидродинамические машины с жидкометаллическим рабочим телом. Л.: Энергия, 1970. – с. 148-149). Индуктор устанавливают на расстоянии от расплава металла в резервуаре с образованием рабочего зазора Δ между поверхностью устройства и поверхностью перемешиваемого расплава металла. Подают питание на обмотки сердечника, в результате чего создается магнитное поле, которое индуктирует в расплаве металла, находящегося в резервуаре, токи. Возникающие в результате взаимодействия индуктированных токов с магнитным полем электромагнитные силы действуют на расплав металла, перемешивая и/или транспортируя его.
Недостатком известного индуктора является то, что несмотря на простоту изготовления плоских катушек без отгибов лобовых частей, их расположение на зубцах индуктора способствует снижению обмоточного коэффициента kоб, поскольку в одном пазу расположены обмотки разных фаз, которые размагничивают друг друга. Снижение обмоточного коэффициента kоб, в свою очередь, обусловливает уменьшение величины магнитного поля в рабочем зазоре Δ между поверхностью индуктора и поверхностью перемешиваемого расплава металла и, следовательно, эффективность машины в целом. Так, например, при выполнении описанного индуктора с однослойной обмоткой с тремя явно выраженными полюсными выступами на двойное полюсное деление, с числом фаз m=3, числом пар полюсов 2p=2, числом пазов сердечника Z=6, фазной зоной α=120°эл., количеством катушек в фазной зоне Q=1 и относительным шагом обмотки β=2/3 обмоточный коэффициент катушки kоб составляет 0,866, что снижает эффективность индуктора примерно на 25 % и является весьма существенным для перемешивания металла, хотя и считается допустимым значением при проектировании электрических машин данного класса в общем. А при выполнении индуктора с двухслойной обмоткой обмоточный коэффициент kоб имеет значения до 0,75, что приводит к еще большему снижению эффективности машины (снижение до 50 %) и является критической величиной.
Известна низкочастотная линейная индукционная машина для воздействия бегущим магнитным полем на расплавы металлов, включающая индуктор с тремя обмотками на длину с фазной зоной 60°эл. (m=3, 2p=1, Z=3, α=60°эл., β=1/3, kоб=0,342) при включении по схеме AYC, то есть инвертированной центральной катушечной группой (Неверов В.Ю. Плоские односторонние линейные индукционные машины с увеличенным рабочим зазором. Автореф. дис. кан. тех. наук. Красноярск: 2010. – с. 20). Конструктивные особенности индукционной машины позволяют использовать ее на больших рабочих зазорах Δ вследствие значительного уменьшения скорости ослабления бегущего магнитного поля в рабочем зазоре Δ при малом числе магнитных полюсов на длину и, следовательно, большом полюсном делении индуктора.
Однако известный индуктор имеет низкую эффективность из-за пониженного обмоточного коэффициента kоб, что обуславливает необходимость компенсировать значительным увеличением массогабаритных показателей и установленной мощности электромагнитного перемешивателя в целом.
Известно устройство для перемешивания расплава металла, содержащее Ш-образный в поперечном сечении сердечник и размещенные в его пазах обмотки с числом фаз m=2, числом пар полюсов 2p=2, числом пазов сердечника Z=4, шириной фазной зоны α=90°эл., количеством катушек в фазной зоне Q=1 (авт. свид. SU1809507, приор.04.12.1989, H02К41/025). Катушки обмоток разделены по высоте паза на несколько секций, размещены в разных параллельных плоскостях с чередованием секций в пазу по фазам и каждая из обмоток охватывает сразу два зубца и один паз сердечника. Конструктивное исполнение катушек обмотки обеспечивает образование продольных по отношению к пазам сердечника каналов для принудительного воздушного охлаждения, что в совокупности со значительным числом витков обмоток в процессе эксплуатации обеспечивает рациональное согласование индукционной нагрузки в виде индуктора по напряжению с низкочастотным источником питания и, следовательно, способствует снижению токов в обмотках.
Недостатком известного индуктора является низкая эффективность. Это обусловлено тем, что размещение плоских катушек индуктора с одновременным охватом двух зубцов и одного паза приходит к существенному увеличению средней длины витка обмотки, повышению индуктивности, увеличению массы и электрических потерь в обмотке. Кроме того, выполнение катушек без отгибов лобовых частей, а также с чередованием по слоям обусловливает низкий коэффициент заполнения паза медью (kcu=0,3÷0,4), что приводит к необходимости увеличения глубины пазов и влечет за собой повышение пазового рассеяния индуктора до половины от основного магнитного потока.
Известен способ перемешивания расплава металла, включающий размещение в виде индуктора электромагнитного перемешивателя на расстоянии рабочего зазора от поверхности расплава металла, его подключение к источнику питания, содержащему преобразователь напряжения, создание бегущего магнитного поля и воздействие указанным полем на расплав металла (патент RU2007266, приор. 04.01.1988, B22D 27/02). При этом бегущее магнитное поле создают с периодическим несинусоидальным трехфазным напряжением (с помощью преобразователя) и используют со спектром, содержащим одновременно гармоники симметричных трехфазных систем напряжений прямой и дополнительно обратной последовательности фаз с возрастающими с ростом частоты амплитудами.
Однако описанный способ имеет низкую эффективность перемешивания расплава металла, обусловленную неоптимальной величиной полюсного деления индуктора. Как следует из описания, в способе используют двухполюсный трехфазный индуктор, на который подают трехфазное несинусоидальное периодическое напряжение с несколькими частотами и амплитудами. Учитывая указанные размеры тигля (120 мм ×150 мм ×300 мм), величину рабочего зазора (Δ=15 мм) и получаемые частоты магнитного поля (14,3 Гц, 28,6 Гц и 50 Гц) используемый индуктор обеспечивает проникновение магнитного поля в расплав металла на глубину не более нескольких миллиметров, что не обеспечивает перемешивания всех слоев расплава металла и, следовательно, приводит к получению слитка с неоднородной структурой и неудовлетворительными механическими свойствами, в частности, когда застывшая часть слитка в процессе кристаллизации достигает 10 мм и больше.
Наиболее близким по технической сущности к заявленной группе изобретений является техническое решение, описанное в международной заявке PCT/IB2014/060273 на изобретение «Способ и устройство для перемещения расплавленного металла», приор. 28.03.2013, дата подачи 28.03.2014, B22D11/115, B22D11/12, B22D27/02, H01F7/20, H02K44/08, H05B6/34, F27D 27/00. Указанный способ включает размещение электромагнитного перемешивателя, содержащего индуктор, на расстоянии рабочего зазора от поверхности расплава металла, его подключение к источнику питания, создание магнитного поля с по меньшей мере двумя парами магнитных полюсов и воздействие указанным полем на расплав металла. При этом подключение к источнику питания осуществляют с регулировкой тока, напряжения или фазы, прикладываемой к катушечным группам индуктора. Устройство, реализующее способ, включает индуктор и соединенный с ним источник питания, при этом индуктор содержит многофазную обмотку из трех катушечных групп, подключенную к шести парам силовых ключей инвертора, то есть с питанием каждой катушечной группы по отдельности. Конструктивное исполнение устройства реализует получение, по меньшей мере, двух пар магнитных полюсов индуктора (2р ≥ 4) в последовательности фаз, соответствующей AYC-схеме соединения: первая фаза (фаза А) равна 0°эл., вторая фаза (фаза Y) равна 60°эл., третья фаза (фаза C) – 120°эл.
Недостатком известного технического решения, выбранного в качестве прототипа для заявляемого способа и электромагнитного перемешивателя продольным магнитным полем, является низкая эффективность перемешивания расплава металла, что признают авторы указанного изобретения в сравнении с другим вариантом индуктора с поперечным магнитным полем. Это обусловлено тем, что создаваемые устройством две и более пары магнитных полюсов на длину индуктора (2р≥4) приводят к сокращению полюсного деления индуктора и, как следствие, уменьшению глубины проникновения поля через увеличенный рабочий зазор Δ. При этом заявленная в формуле изобретения возможность создания прототипом-устройством, например, трех пар магнитных полюсов (2р=6) при отсутствии сведений о характере навивки катушечных групп и обмоточных данных индуктора позволяет сделать вывод о применении девяти катушечных групп с инвертированием второй, пятой и седьмой катушечных групп и включением последовательно каждой третьей катушечной группы пофазно, что также приводит к существенному снижению эффективности индуктора из-за несоответствия величины полюсного деления индуктора и рабочего зазора Δ. В описании устройства-прототипа приводится также пример неэффективного индуктора с продольным магнитным полем длиной 2718 мм для рабочего зазора Δ=500 мм и схемой подключения обмоток AYC с фазной зоной 60°эл., но ширина фазной зоны индуктора завышена более чем на 30 %, что приводит к критическому падению эффективности индуктора для рабочего зазора Δ=500 мм.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачей изобретения является повышение эффективности перемешивания расплава металла при наименьших энергетических затратах, пониженной массе индуктора электромагнитного перемешивателя и уменьшенных габаритных размеров.
Технический результат заключается в оптимизации обмоточных данных (в первую очередь числа пар магнитных полюсов индуктора и, как следствие, величины полюсного деления индуктора) при заданной величине рабочего зазора Δ между индуктором и поверхностью перемешиваемого расплава металла и возможности использования общепромышленных полупроводниковых источников питания (с тремя парами силовых ключей инвертора).
Технический результат достигается тем, что в способе, при котором используют электромагнитный перемешиватель, включающий индуктор, подключенный к низкочастотному источнику питания, индуктор размещают на расстоянии рабочего зазора Δ от расплава металла и создают продольное бегущее и пульсирующее магнитные поля, и, тем самым, воздействуют указанными магнитными полями на расплав металла, согласно изобретению, задают фазы тока на подключенные катушечные группы таким образом, чтобы полюсное деление индуктора по магнитодвижущей силе катушечных групп соответствовало (0,7-2,2)∙Δ∙π, суммарная ширина фазных зон катушечных групп по магнитным потокам составляла до 400°эл., а на активную длину индуктора приходилось дробное или нечетное число пар магнитных полюсов индуктора, но не более 2. В частных случаях реализации способа:
– катушечные группы подключают к отдельным двум парам силовых ключей инвертора источника питания;
– формируют различные по фазе и амплитуде магнитодвижущие силы центральных и боковых катушечных групп таким образом, чтобы разница фаз магнитодвижущих сил катушечных групп соответствовала 60°эл. или 90°эл.;
– задают фазы тока и амплитуды тока каждой катушечной группы отличными от фазы тока и амплитуды тока соответствующих смежных катушечных групп;
– формируют сдвиг фаз токов катушечных групп по сигналу обратной связи от датчиков магнитного потока, размещенных на зубцах индуктора;
– спользуют индуктор с тремя катушечными группами на активную длину, подключают каждую катушечную группу к средней точке трех отдельных пар силовых полупроводниковых ключей инвертора низкочастотного источника питания по схеме “звезда” или “треугольник” и формируют различные по фазе и амплитуде магнитодвижущие силы центральных и боковых катушечных групп таким образом, чтобы ширина фазной зоны каждой катушечной группы по магнитодвижущей силе соответствовала или была меньше 60°эл.;
– используют индуктор с четырьмя катушечными группами на активную длину, подключают каждую катушечную группу к средней точке трех отдельных пар силовых полупроводниковых ключей инвертора низкочастотного источника питания по схеме “звезда” или “треугольник” и задают фазы тока таким образом, чтобы на активную длину индуктора приходилось дробное число пар магнитных полюсов индуктора 2p=4/3, а ширина фазной зоны каждой катушечной группы по магнитодвижущей силе соответствовала или была меньше 60°эл.;
– используют индуктор с тремя катушечными группами на активную длину, подключают крайние катушечные группы к средним точкам двух пар силовых полупроводниковых ключей инвертора низкочастотного источника питания, подключают центральную катушечную группу к средним точкам других двух пар силовых полупроводниковых ключей инвертора низкочастотного источника питания, задают фазы тока таким образом, чтобы на активную длину индуктора приходилось дробное число пар магнитных полюсов индуктора 2p=3/2, а ширина фазной зоны каждой катушечной группы по магнитодвижущей силе соответствовала 90°эл.;
– используют индуктор с тремя катушечными группами на активную длину, при установке на печь и подключении к трехфазному или двухфазному источнику питания и в зависимости от числа фаз источника питания выбирают схему подключения катушечных групп таким образом, что либо подключают катушечные группы к средним точкам трех пар силовых полупроводниковых ключей инвертора низкочастотного источника питания по схеме “звезда” или “треугольник” и формируют различные по фазе и амплитуде магнитодвижущие силы центральных и боковых катушечных групп так, чтобы ширина фазной зоны каждой катушечной группы по магнитодвижущей силе соответствовала, или была меньше 60°эл., либо подключают крайние катушечные группы к средним точкам двух пар силовых ключей инвертора низкочастотного источника питания, подключают центральную катушечную группу к средним точкам других двух пар силовых ключей инвертора низкочастотного источника питания, задают фазы тока такими, чтобы на активную длину индуктора приходилось дробное число пар магнитных полюсов индуктора 2p=3/2, а ширина фазной зоны каждой катушечной группы по магнитодвижущей силе соответствовала 90°эл., для чего на катушечных группах индуктора предусмотрены дополнительные электрические контакты для подстройки нагрузки под ту или иную схему включения;
– создают комбинацию магнитных потоков путем формирования источником питания на многофазной обмотке периодического напряжения, содержащего спектр из основной гармоники и дополнительных гармоник симметричных трехфазных систем напряжений прямой или обратной последовательности;
– осуществляют воздействие циклично, при этом цикл включает одну смену направления движения бегущего магнитного поля и в каждом цикле после смены направления движения бегущего магнитного поля изменяют частоту и величину напряжения на многофазной обмотке;
– длительность воздействия бегущим магнитным полем одного направления составляет 2-4 мин.;
– используют низкочастотный источник питания, содержащий выпрямитель на базе IGBT-модулей, при создании продольного бегущего и пульсирующего магнитных полей управляют последовательностью импульсов для каждого плеча IGBT-модуля в течение всего периода, которые согласованы с импульсами управления инвертором на базе IGBT-модулей;
– используют низкочастотный источник питания, содержащий инвертор на базе IGBT-модулей, при создании продольного бегущего и пульсирующего магнитных полей управляют импульсами с частотой широтно-импульсной модуляции (ШИМ) менее 1000 Гц.
Технический результат достигается также тем, что в первом варианте реализации электромагнитного перемешивателя расплава металла для осуществления способа, содержащем индуктор и соединенный с ним низкочастотный источник питания, при этом индуктор имеет разомкнутый сердечник с зубцами и многофазную обмотку из трех катушечных групп, расположенную в пазах между зубцами сердечника с охватом спинки сердечника, согласно изобретению, число витков крайних катушечных групп больше числа витков центральной катушечной группы, центральная катушечная группа инвертирована относительно крайних катушечных групп за счет направления навивки или подключения, а катушечные группы соединены по схеме “звезда” или “треугольник” и подключены к средним точкам трех пар силовых ключей инвертора источника питания. В частных случаях исполнения первого варианта электромагнитного перемешивателя:
– содержит меньшей мере две дополнительные катушечные группы, расположенные на сердечнике после крайних катушечных групп относительно середины сердечника;
– зубцы сердечника выполнены шире спинки сердечника;
– стержень сердечника имеет переменное в продольном направлении поперечное сечение;
– спинка сердечника выполнена из электротехнической стали, а зубцы из конструкционной стали;
– источник питания на шине постоянного тока содержит емкость более 30 мФ;
– индуктор соединен с низкочастотным источником питания силовым экранированным кабелем с четным числом проводников, при этом половина проводников соединена с началом катушечных групп, а другая половина проводников соединена с концом катушечных групп.
Технический результат достигается также тем, что во втором варианте реализации электромагнитного перемешивателя расплава металла для осуществления способа, содержащем индуктор и соединенный с ним низкочастотный источник питания, при этом индуктор включает разомкнутый сердечник с зубцами и многофазную обмотку из по меньшей мере трех катушечных групп, расположенную в пазах между зубцами сердечника с охватом спинки сердечника, согласно изобретению, крайние катушечные группы включены последовательно и встречно, при этом число витков крайних катушечных групп меньше или равно числу витков центральных катушечных групп, а по длине сердечника четные катушечные группы инвертированы относительно нечетных катушечных групп за счет направления навивки или схемы подключения. В частных случаях исполнения второго варианта электромагнитного перемешивателя:
– содержит по меньшей мере две дополнительные катушечные группы, расположенные на сердечнике после крайних катушечных групп относительно середины сердечника;
– зубцы сердечника выполнены шире спинки сердечника;
– индуктор включает три катушечные группы, инвертор источника питания содержит четыре пары силовых ключей, при этом центральная катушечная группа соединена со средними точками первых двух пар силовых полупроводниковых ключей, а крайние катушечные группы подключены ко вторым двум парам силовых ключей;
– индуктор имеет четыре катушечные группы, подключенные к средним точкам трех пар силовых ключей инвертора низкочастотного источника питания по схеме “треугольник”, при этом крайние катушечные группы подключены в одно плечо “треугольника”, вторая по длине сердечника катушечная группа подключена во второе плечо “треугольника”, а третья по длине сердечника катушечная группа подключена в треть плечо “треугольника”;
– индуктор содержит четыре катушечные группы, включенные к средним точкам трех пар силовых ключей инвертора низкочастотного источника питания по схеме “звезда”, при этом крайние катушечные группы подключены к одной фазе “звезды”, вторая по длине сердечника катушечная группа подключена ко второй фазе “звезды”, а третья по длине сердечника катушечная группа подключена к третьей фазе “звезды”, а нулевая точка «звезды» соединена со средней точкой двух соединенных последовательно конденсаторов на шине постоянного тока низкочастотного источника питания;
– стержень сердечника имеет переменное в продольном направлении поперечное сечение;
– поперечное сечение центральной части стержня сердечника, на которой размещены центральные катушечные группы, больше поперечного сечения крайних частей стержня, на которых размещены крайние катушечные группы;
– спинка сердечника выполнена из электротехнической стали, а зубцы из конструкционной стали;
– источник питания содержит активный управляемый выпрямитель на основе силовых IGBT-модулей;
– источник питания на шине постоянного тока содержит емкость более 30 мФ;
– индуктор соединен с низкочастотным источником питания силовым экранированным кабелем с четным числом проводников, при этом половина проводников соединена с началом катушечных групп, а другая половина проводников соединена с концом катушечных групп.
Авторами изобретения выявлено, что эффективность перемешивания расплава металла при наименьших энергетических, массовых и габаритных показателях зависит от выбора оптимальных обмоточных данных, соответствующих величине рабочего зазора Δ между индуктором и поверхностью перемешиваемого расплава металла, при возможности использования общепромышленных полупроводниковых преобразователей частоты в качестве источников питания электромагнитного перемешивателя. Согласно способу, оптимизация обмоточных данных обеспечивается подбором сочетания схемы подключения катушечных групп к источнику питания и подачи фаз тока в зависимости от заданной величины рабочего зазора Δ. Так авторами экспериментально установлено, что заявленный диапазон суммарной ширины фазных зон катушечных групп по магнитному потоку на коронках зубцов (до 400°эл.) является оптимальным для получения максимального электромагнитного усилия индуктора Fτ при различном числе пар магнитных полюсов индуктора.
Заявленный диапазон полюсного деления индуктора по фазам магнитодвижущей силы катушечных групп индуктора τ = (0,7-2,2)∙Δ∙π позволяет обеспечить величину электромагнитного усилия не менее 50 % от максимального усилия при оптимальной величине полюсного шага, а диапазон τ = (0,95-1,7)∙Δ∙π – не менее 75 %.
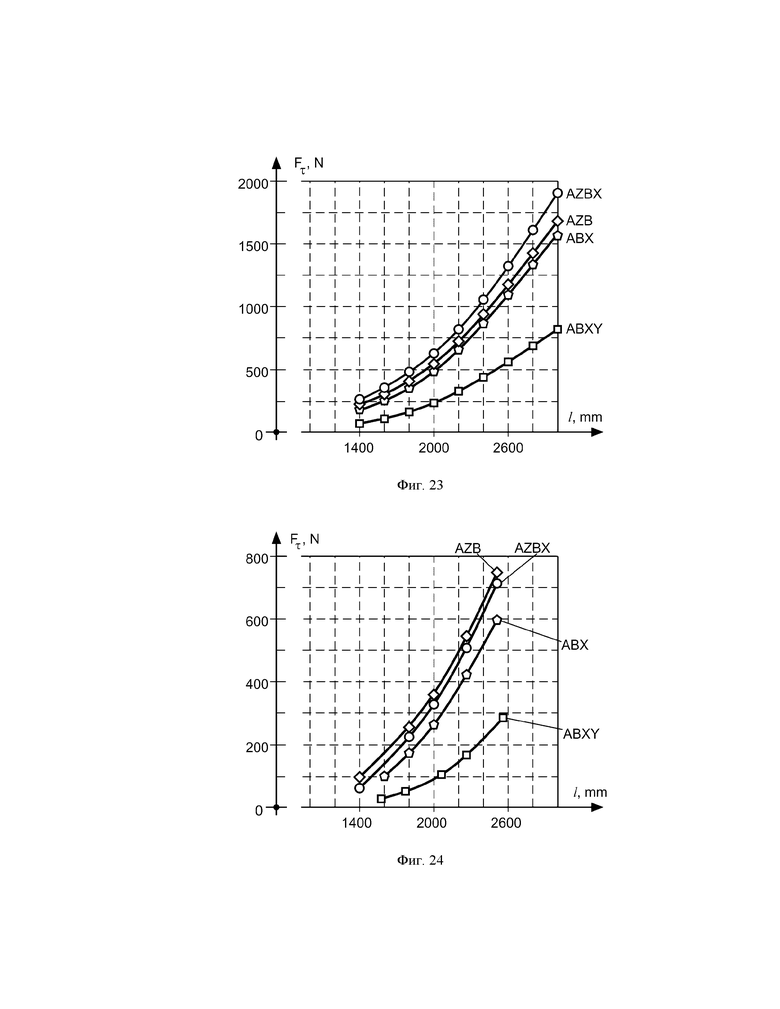
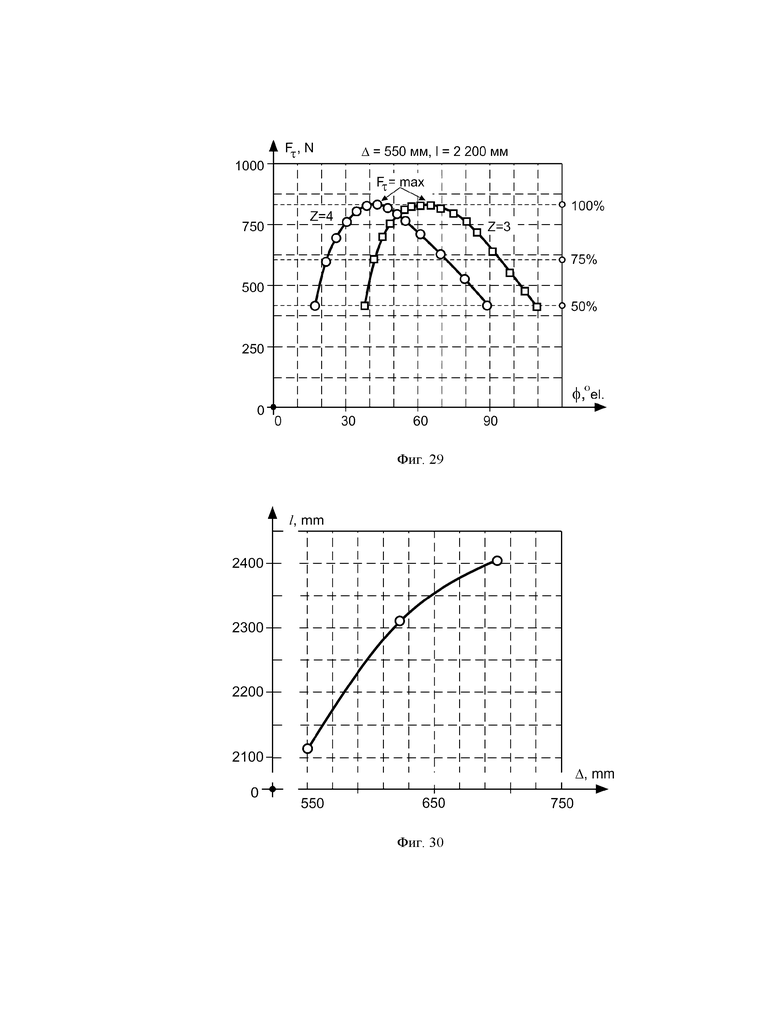
Кроме того, авторами выявлено, что для рабочего зазора Δ=550 мм оптимальная величина полюсного деления индуктора τ по магнитным потокам составит около1200÷1250 мм, а по магнитодвижущей силе - 2150 мм. Это значит, что при длине индуктора 2000 мм более рационально использовать трехзонный индуктор (с тремя катушечными группами) со схемой подключения AZB или четырехзонный индуктор (с четырьмя катушечными группами) со схемой подключения AZBX, что следует из фиг. 23,фиг. 25, фиг. 27, полученных авторами заявляемого изобретения в результате математического моделирования индуктора. Для рабочего зазора Δ = 700 мм оптимальная величина полюсного деления индуктора по магнитодвижущей силе составит 2400 мм (см. фиг. 24, фиг. 26, фиг. 28). На представленных фигурах видно, что для рассматриваемых рабочих зазоров 550 мм и 700 мм индуктор с четырьмя катушечными группами по схеме включения ABXY (2р=2) существенно уступает всем вариантам индуктора с нечетным и дробным числом пар магнитных полюсов AZB (2р=1), AZBX (2р=4/3), ABX (2р=3/2). Перечисленные схемы включения AZB, AZBX, ABX предполагают подключение к симметричной системе напряжений с фазовым сдвигом между смежными катушечными группами по длине индуктора 60°эл. для трехфазного исполнения (схемы AZB и AZBX) и для двухфазного исполнения 90°эл. (схема ABX). Но если каждую катушечную группу индуктора подключить к средним точкам двух отдельных пар силовых полупроводниковых ключей инвертора низкочастотного источника питания и независимого управлять фазами токов в каждой катушечной группе, то можно выставить любое другое значение угла фазового сдвига токов в смежных катушечных группах. Это позволяет задавать оптимальную величину полюсного деления индуктора по магнитным потокам при имеющейся длине индуктора и схеме подключения катушечных групп, например, когда меняется рабочий зазор Δ.
Реализация способа перемешивания расплава металла обеспечивается применением электромагнитного перемешивателя по любому из двух вариантов исполнения. Так, особенности выполнения многофазной обмотки (количество катушечных групп от 3 до N или схема их подключения друг с другом (расщепление на части одной из фаз многофазной обмотки) и выполнение катушечных групп инвертированными за счет направления намотки или схемы подключения обеспечивает получение дробного и нечетного числа пар магнитных полюсов на активную длину индуктора, а использование катушечных групп с различным числом витков Wi, где i = 1, …, N – количество катушечных групп, обеспечивает симметричность их сопротивления при различных схемах подключения к парам силовых ключей, что в совокупности обусловливает получение оптимальных обмоточных данных индуктора для варьирования величины рабочего зазора Δ. Дробное и нечетное число пар магнитных полюсов на активную длину индуктора, в свою очередь, позволяет сформировать суммарную величину фазных зон катушечных групп по магнитным потокам меньше 400°эл., что также способствует получению оптимальных обмоточных данных индуктора исходя из величины рабочего зазора Δ. На фиг. 15 представлена векторная диаграмма магнитодвижущих сил (МДС) катушечных групп многофазной обмотки и магнитные потоки зубцов через площадь активной поверхности зубца (или на коронках зубцов). На диаграмме МДС катушечных групп с фазами A, B, X и Y представлены магнитными потоками F1, F2, F3 и F4, сдвинутыми на 90°эл. При этом смежные магнитные потоки на активной поверхности зубцов Ф1, Ф2, Ф3, Ф4, Ф5 сдвинуты друг относительно друга не на 90°эл., а на разные углы от 83°эл. до 128°эл., а суммарный угол сдвига между углами магнитных потоков Ф1 и Ф5 составляет 412°эл. Для схем AZB (2р = 1), AZBX (2р = 4/3) и ABX (2р = 3/2) угол сдвига фаз магнитных потоков будет соответственно около 276°эл. (см. фиг. 4), 323°эл. (см. фиг. 9), 350°эл. (см. фиг. 12). Отличие угла фазового сдвига по МДС от ширины фазной зоны плоского индуктора по магнитному потоку обусловлено наличием краевых эффектов и относительно небольшим числом магнитных полюсов на длину. Исходя из того, что суммарная величина фазных зон катушечных групп по магнитным потокам не совпадает по величине с суммарной величиной фазных зон по МДС, то определять ширину магнитного полюса индуктора можно выражением по МДС катушечных групп τ = l/2p или по суммарной величине фазных зон катушечных групп по магнитным потокам  , где χ - суммарная величина фазных зон катушечных групп по магнитным потокам или сдвиг фазы магнитного потока в первом и последнем зубце по длине индуктора. Физически сдвиг фаз может быть определен на реальном индукторе с помощью датчиков магнитного потока или измерительных катушек на коронках зубцов. Таким образом, ширина магнитного полюса по магнитным потокам для индуктора длиной 2000 мм с включением катушечных групп по схемам AZB (2р=1), AZBX (2р=4/3), ABX (2р=3/2) и ABXY (2р=2) будет равна около 1304 мм, 1114 мм, 1028 мм, 874 мм, соответственно.
, где χ - суммарная величина фазных зон катушечных групп по магнитным потокам или сдвиг фазы магнитного потока в первом и последнем зубце по длине индуктора. Физически сдвиг фаз может быть определен на реальном индукторе с помощью датчиков магнитного потока или измерительных катушек на коронках зубцов. Таким образом, ширина магнитного полюса по магнитным потокам для индуктора длиной 2000 мм с включением катушечных групп по схемам AZB (2р=1), AZBX (2р=4/3), ABX (2р=3/2) и ABXY (2р=2) будет равна около 1304 мм, 1114 мм, 1028 мм, 874 мм, соответственно.
Снабжение устройства дополнительными катушечными группами, выполнение стержня сердечника с переменным в продольном направлении поперечным сечением, в частности, с увеличенным поперечным сечением центральной части стержня по сравнению с крайними частями стержня, обеспечивает снижение влияния краевых эффектов на магнитное поле в расплаве и повышает эффективность индуктора в целом. Выполнение зубцов шире спинки обусловливает увеличение активной ширины индуктора и, следовательно, расширение зоны воздействия магнитным полем, что дополнительно способствует повышению эффективности перемешивания.
В плоской машине величина суммарного магнитного потока по спинке сердечника будет неодинаковой по длине спинки сердечника (больше под центральными катушечными группами и меньше под крайними катушечными группами), поэтому поперечное сечение спинки сердечника больше под центральными катушечными группами и меньше под крайними по длине, что позволяет добиться уменьшения массы индуктора, расхода активных материалов и потерь в меди крайних катушек.
Индуктор электромагнитного перемешивателя является индуктивной нагрузкой для источника питания и работает на частоте, близкой к 1 Гц. Чем меньше частота ШИМ на IGBT-модулях инвертора источника питания, тем меньше потеря напряжения на высших гармониках, больше ток в обмотке индуктора, меньше потери в IGBT-модулях инвертора, он меньше нагревается. Поэтому частота ШИМ для индукторов выбирается меньше 1 кГц и, зачастую, близкой к значению 100 Гц.
Самой нагруженной частью сердечника с максимальной величиной магнитных потоков является спинка сердечника, а менее нагруженной – зубцы. Учитывая то, что в наилучшей степени магнитный поток проводит электротехническая сталь, характеризующаяся также низкими потерями в стали, но являющаяся достаточно дорогостоящей, более предпочтительно выполнение стержня сердечника из электротехнической стали, а зубцов – из конструкционной стали, что в совокупности обусловливает максимальную эффективность и минимизацию издержек на изготовление сердечника индуктора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЙ
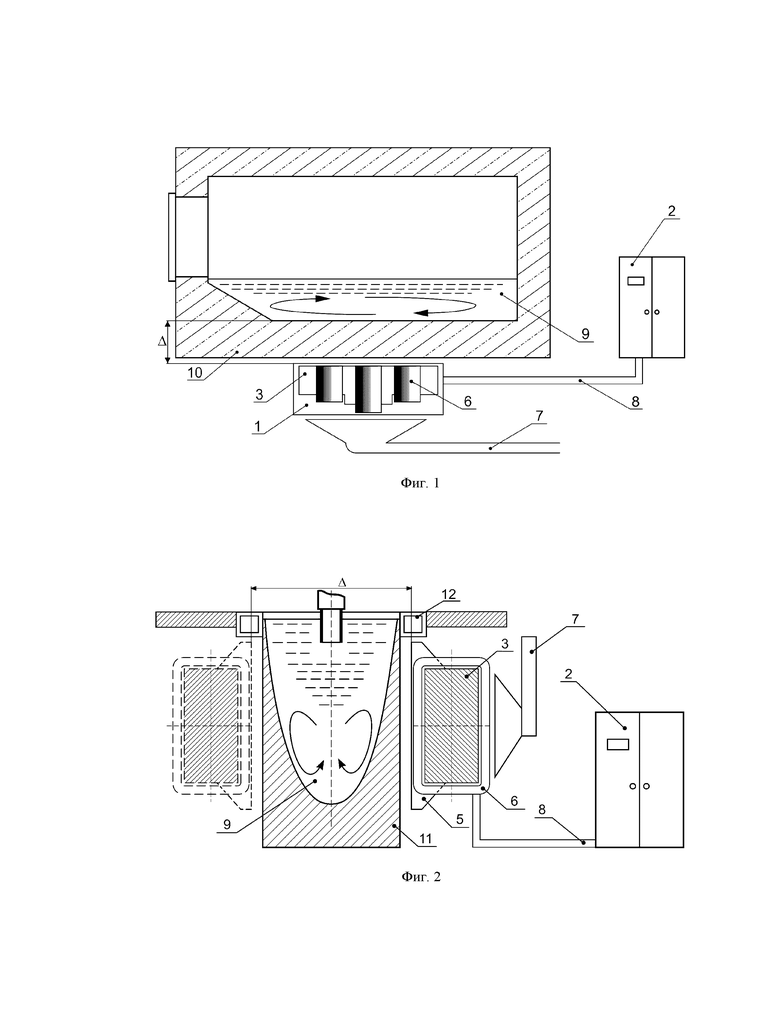
Фиг. 1 – общий вид печи с электромагнитным перемешивателем расплава металла;
Фиг. 2 – общий вид кристаллизатора с электромагнитным перемешивателем расплава металла (в процессе кристаллизации);
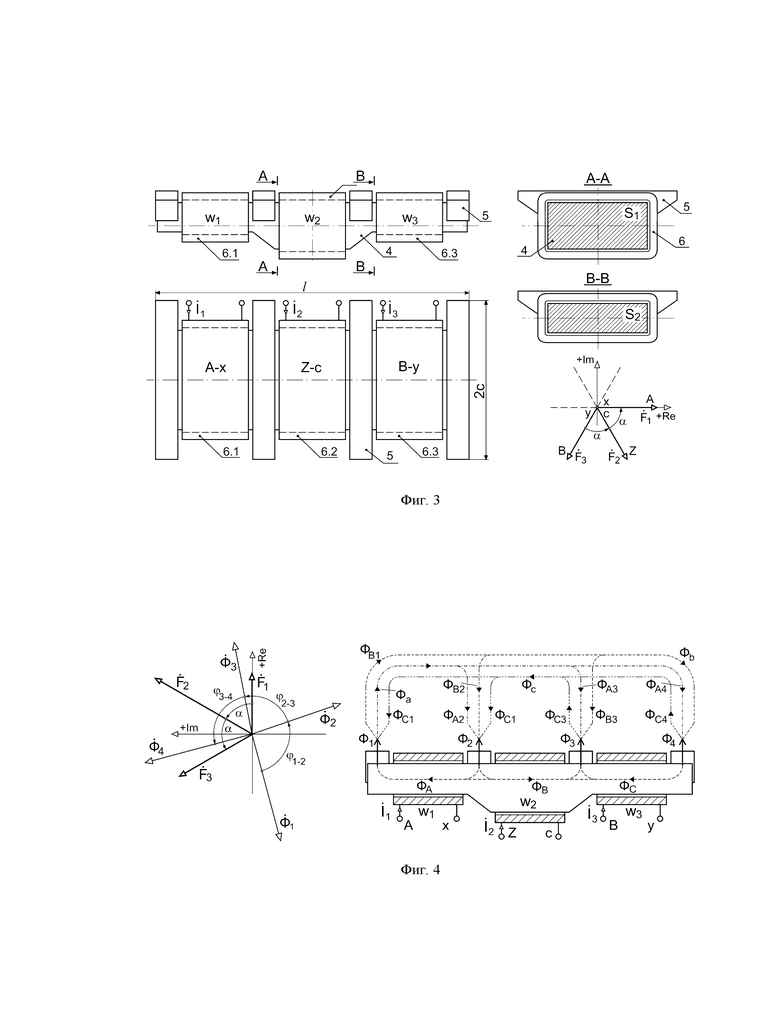
Фиг. 3 – индуктор с тремя катушечными группами на длину и обмоточными данными многофазной обмотки m=3, 2p=1, Z=3, q=1, α=60°эл. с векторной диаграммой магнитодвижущих сил катушечных групп;
Фиг. 4 – распределение магнитных потоков индуктора с тремя обмотками на длину по фиг. 3 в трехфазном исполнении (индуктор с расщепленной обмоткой) и векторная диаграмма магнитодвижущих сил катушечных групп (F1, F2, F3) и магнитных потоков (Ф1, Ф2, Ф3, Ф4) на коронках зубцов сердечника;
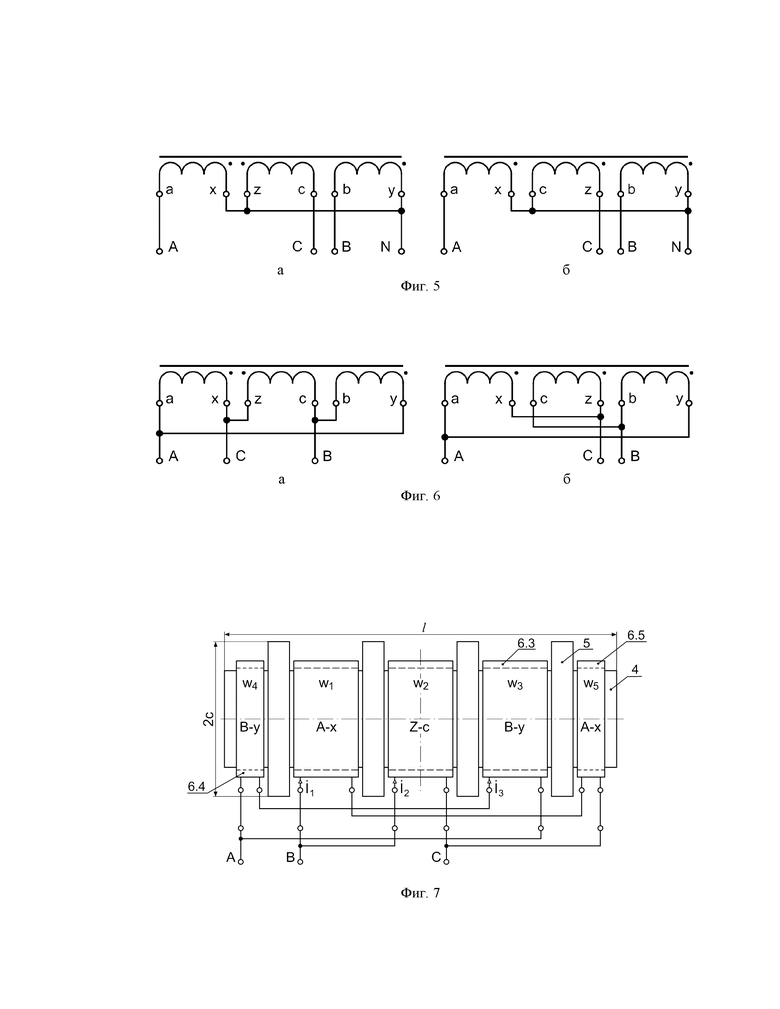
Фиг. 5 – схема подключения индуктора с тремя катушечными группами на длину по схеме AZB по схеме “звезда” с инверсией направления намотки (а) и инверсией подключения обмотки (б);
Фиг. 6 – схема подключения индуктора с тремя катушечными группами на длину по схеме AZB по схеме “треугольник” с инверсией направления намотки (а) и инверсией подключения обмотки (б);
Фиг. 7 – индуктор с тремя основными катушечными группами на длину и обмоточными данными многофазной обмотки m=3, 2p=1, Z=3, q=1, α=60°эл. и двумя дополнительными катушечными группами;
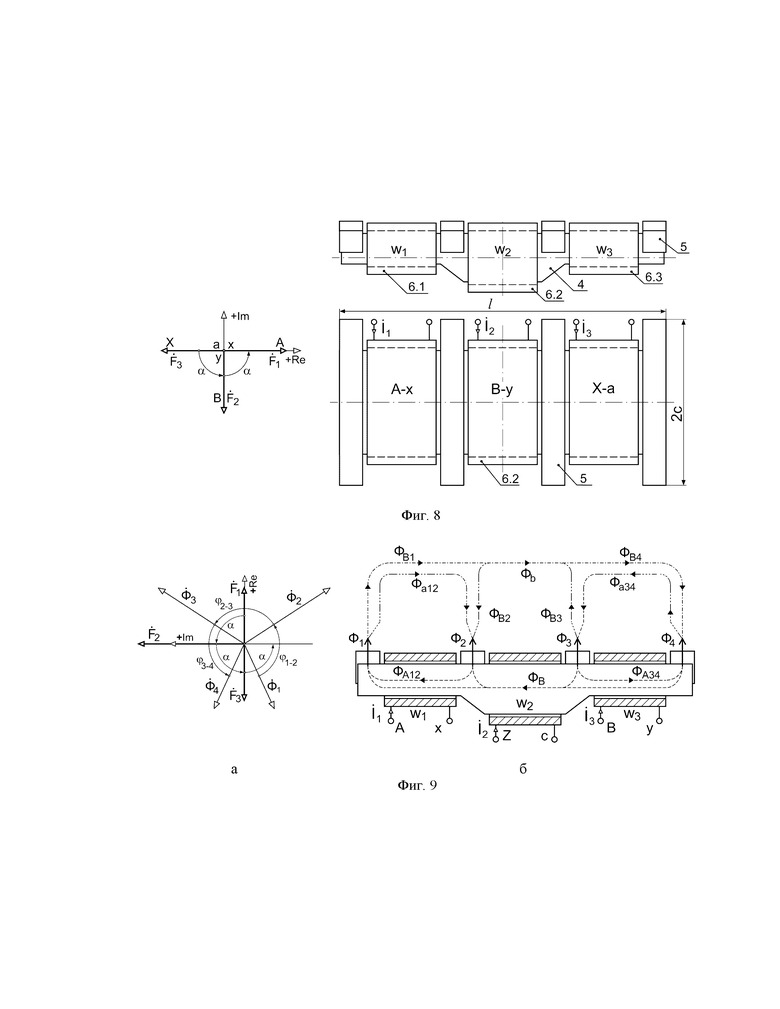
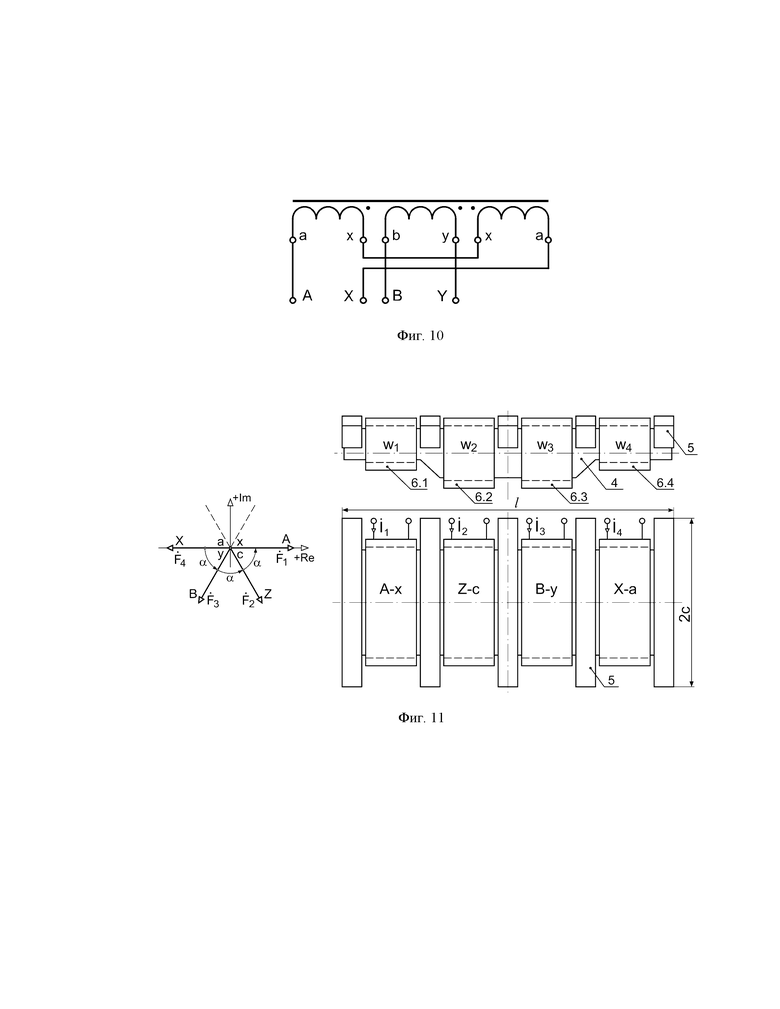
Фиг. 8 – индуктор с тремя катушечными группами на длину и обмоточными данными многофазной обмотки m=2, 2p=3/2, Z=3, q=1, α=90°эл. с векторной диаграммой магнитодвижущих сил катушечных групп;
Фиг. 9 – распределение магнитных потоков индуктора с тремя обмотками на длину по фиг. 8 в двухфазном исполнении (индуктор с расщепленной обмоткой) и векторная диаграмма магнитодвижущих сил катушечных групп (F1, F2, F3) и магнитных потоков (Ф1, Ф2, Ф3, Ф4) на коронках зубцов сердечника;
Фиг. 10 – схема подключения индуктора с тремя катушечными группами на длину по схеме ABX по фиг. 9;
Фиг. 11 – индуктор с четырьмя основными катушечными группами на длину и обмоточными данными многофазной обмотки m=3, 2p=4/3, Z=3, q=1, α=60°эл. с векторной диаграммой магнитодвижущих сил катушечных групп;
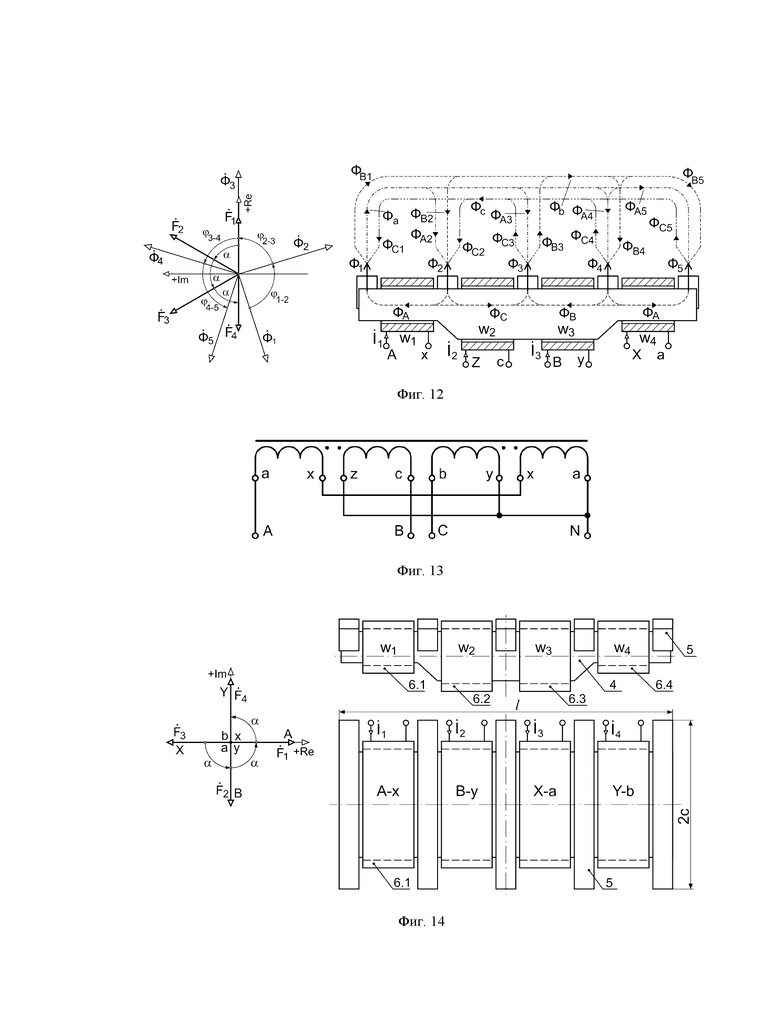
Фиг. 12 – распределение магнитных потоков индуктора с четырьмя обмотками на длину по фиг. 11 в трехфазном исполнении (индуктор с расщепленной обмоткой) и векторная диаграмма магнитодвижущих сил катушечных групп (F1, F2, F3, F4) и магнитных потоков (Ф1, Ф2, Ф3, Ф4, Ф5) на коронках зубцов сердечника;
Фиг. 13 – схема подключения индуктора с четырьмя катушечными группами на длину по схеме AZBX по фиг. 11;
Фиг. 14 – индуктор с четырьмя основными катушечными группами на длину и обмоточными данными многофазной обмотки m=2, 2p=2, Z=4, q=1, α=90°эл. с векторной диаграммой магнитодвижущих сил катушечных групп;
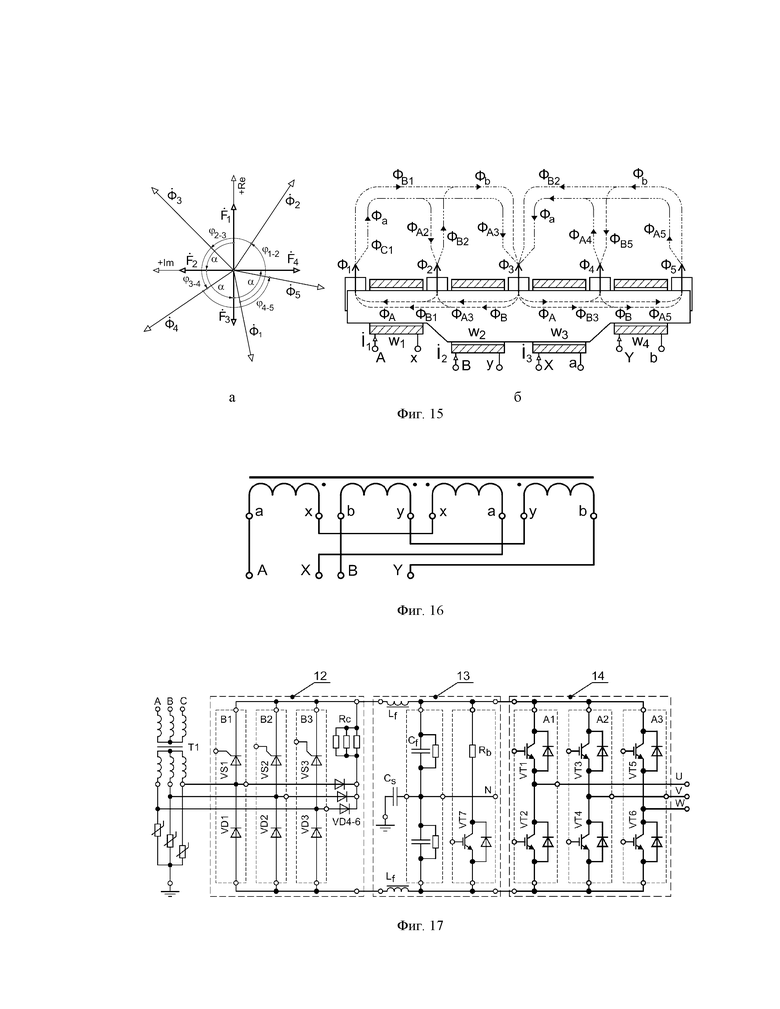
Фиг. 15 – распределение магнитных потоков индуктора с четырьмя обмотками на длину по фиг. 14 в двухфазном исполнении (индуктор с расщепленной обмоткой) и векторная диаграмма магнитодвижущих сил катушечных групп (F1, F2, F3, F4) и магнитных потоков (Ф1, Ф2, Ф3, Ф4, Ф5) на коронках зубцов сердечника;
Фиг. 16 - схемы подключения индуктора с тремя катушечными группами на длину по схеме AZBX по фиг. 14;
Фиг. 17 - электрическая схема преобразователя частоты с выпрямителем, звеном постоянного тока и инвертором на базе трех пар силовых ключей (А1, А2, А3);
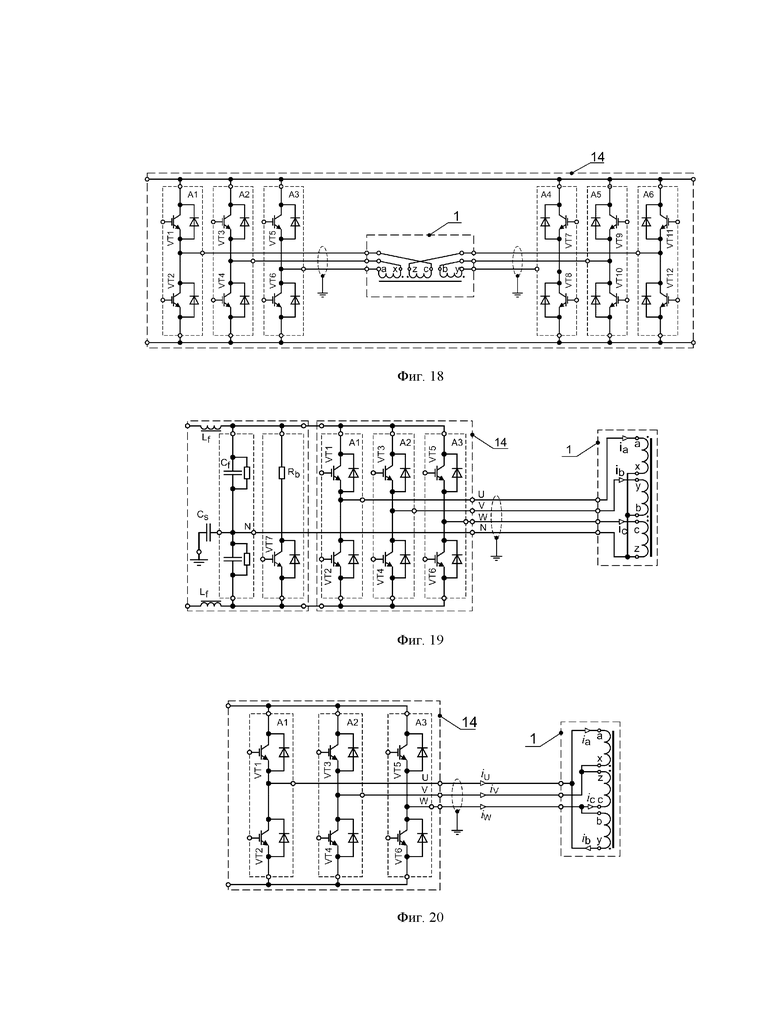
Фиг. 18 - инвертор напряжения преобразователя частоты на базе шести пар силовых ключей (А1, А2, А3, А4, А5, А6) и включением трехфазного трехзонного индуктора по схеме с параметрами m=3, 2p=1, Z=3, q=1, α=60°эл.;
Фиг. 19 - электрическая схема преобразователя частоты с выпрямителем, звеном постоянного тока и инвертором на базе трех пар силовых ключей (А1, А2, А3) и включением трехфазного трехзонного индуктора в звезду по схеме с параметрами m=3, 2p=1, Z=3, q=1, α=60°эл.;
Фиг. 20 - электрическая схема преобразователя частоты с выпрямителем, звеном постоянного тока и инвертором на базе трех пар силовых ключей (А1, А2, А3) и включением трехфазного трехзонного индуктора в треугольник;
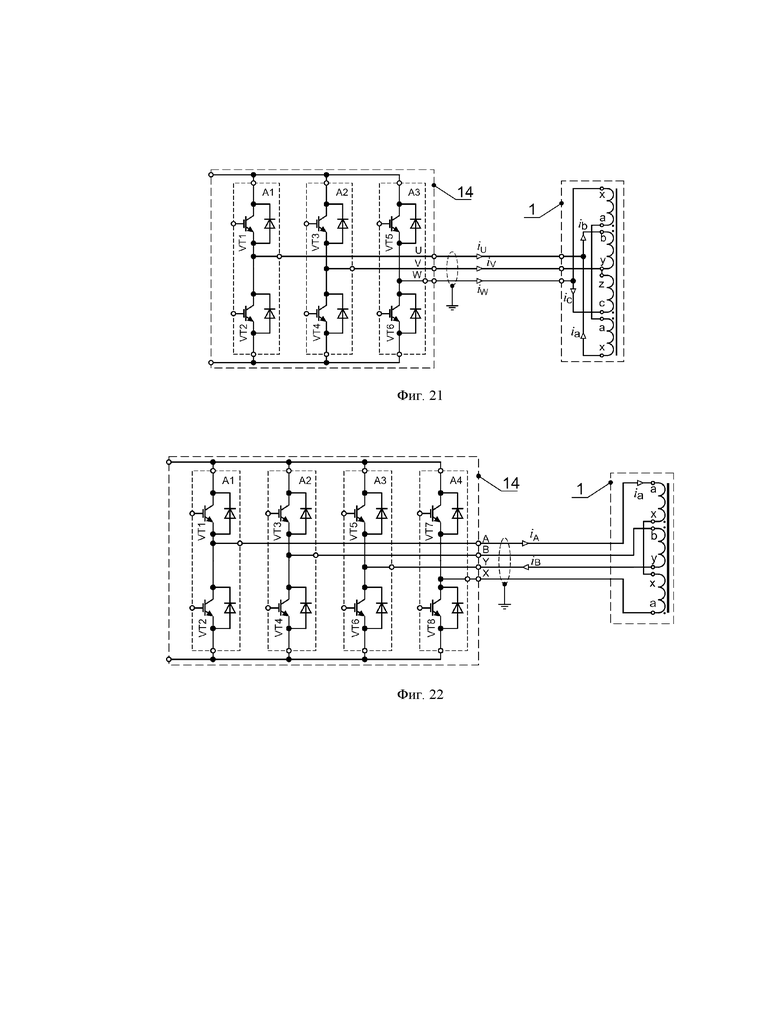
Фиг. 21 - инвертор напряжения преобразователя частоты на базе трех пар силовых ключей (А1, А2, А3) и включением трехфазного четырехзонного индуктора по схеме с параметрами m=3, 2p=4/3, Z=4, q=1, α=60°эл.;
Фиг. 22 - инвертор напряжения преобразователя частоты на базе четырех пар силовых ключей (А1, А2, А3, А4) и включением двухфазного трехзонного индуктора по схеме с параметрами m=2, 2p=3/2, Z=3, q=1, α=90°эл.;
Фиг. 23 - зависимость тангенциального усилия электромагнитного перемешивателя на расплав в печи для четырех вариантов схем подключения обмоток в зависимости от длины индуктора при рабочем зазоре 550 мм;
Фиг. 24 - зависимость тангенциального усилия электромагнитного перемешивателя на расплав в печи для четырех вариантов схем подключения обмоток в зависимости от длины индуктора при рабочем зазоре 700 мм;
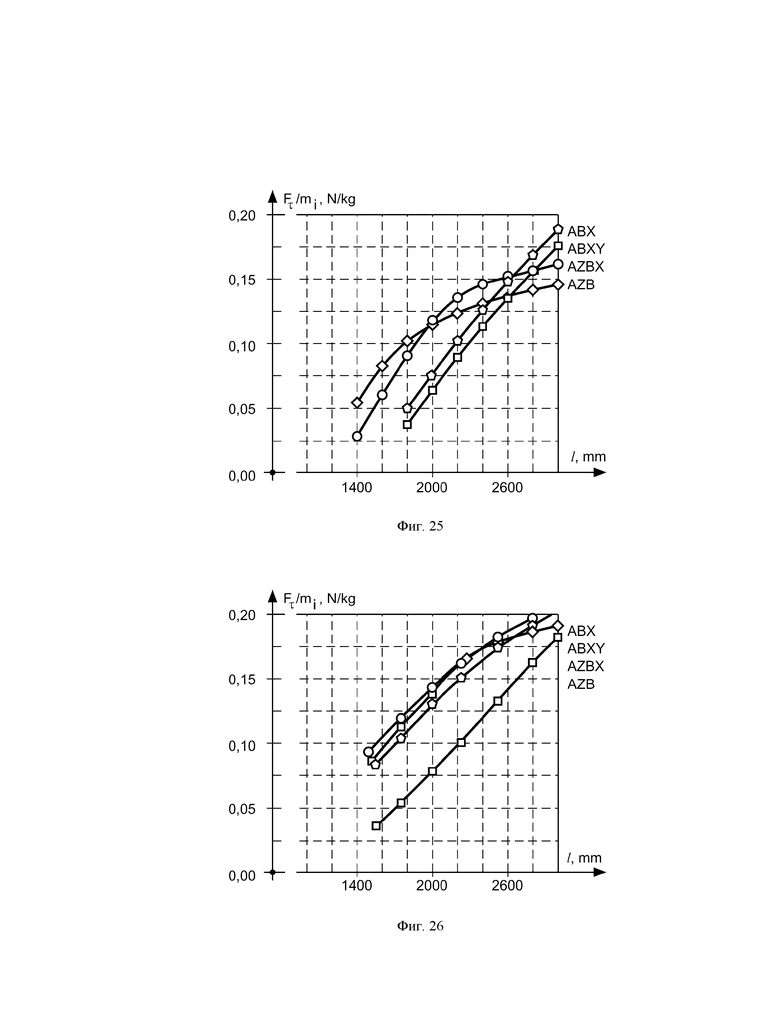
Фиг. 25 - зависимость отношения тангенциального усилия электромагнитного перемешивателя на расплав в печи к массе индуктора для четырех вариантов схем подключения обмоток в зависимости от длины индуктора при рабочем зазоре 550 мм;
Фиг. 26 - зависимость отношения тангенциального усилия электромагнитного перемешивателя на расплав в печи к массе индуктора для четырех вариантов схем подключения обмоток в зависимости от длины индуктора при рабочем зазоре 700 мм;
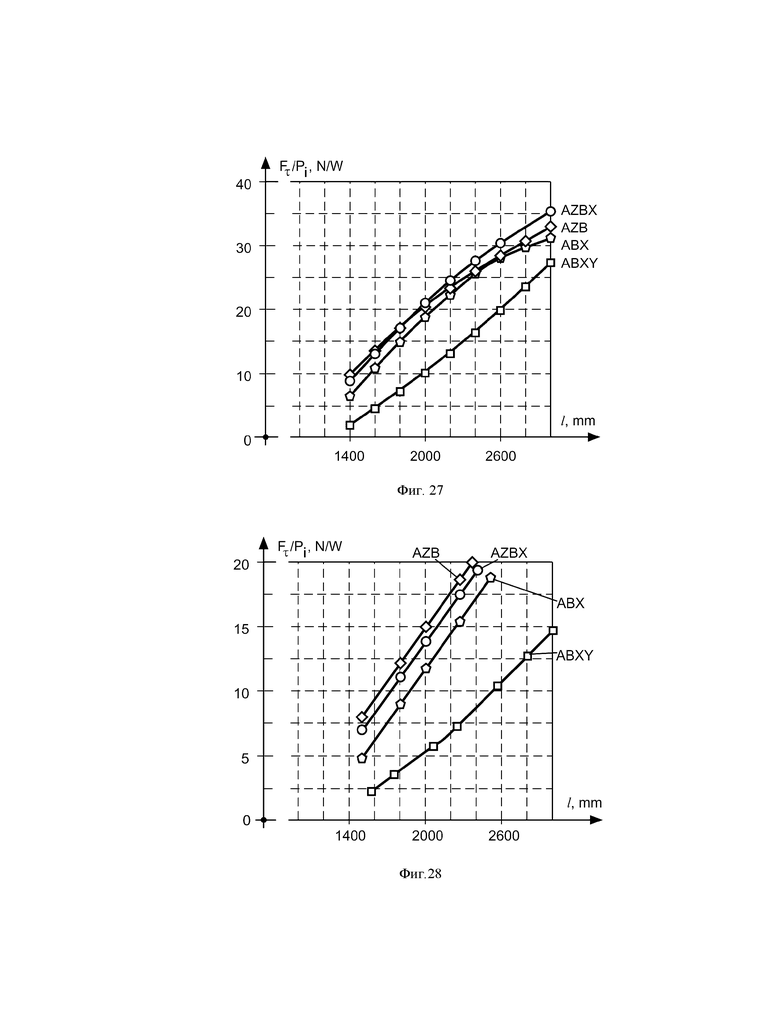
Фиг. 27 - зависимость отношения тангенциального усилия электромагнитного перемешивателя на расплав в печи к потребляемой активной мощности для четырех вариантов схем подключения обмоток в зависимости от длины индуктора при рабочем зазоре 550 мм;
Фиг. 27 - зависимость отношения тангенциального усилия электромагнитного перемешивателя на расплав в печи к потребляемой активной мощности для четырех вариантов схем подключения обмоток в зависимости от длины индуктора при рабочем зазоре 700 мм;
Фиг. 28 - зависимость отношения тангенциального усилия электромагнитного перемешивателя на расплав в печи к потребляемой активной мощности для четырех вариантов схем подключения обмоток в зависимости от длины индуктора при рабочем зазоре 700 мм;
Фиг. 29 - зависимость тангенциального усилия электромагнитного перемешивателя на расплав в печи от угла фазового сдвига магнитодвижущих сил соседних катушечных групп для трех (N=3) и четырех (N=4) катушечных групп индуктора при длине 2200 мм и рабочем зазоре 550 мм;
Фиг. 30 – оптимальная величина индуктора и полюсного деления индуктора при 2р=1 от величины рабочего зазора Δ.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Для реализации заявленного способа используют электромагнитный перемешиватель по одному из двух вариантов исполнения, который включает плоский индуктор 1, подключенный к источнику питания 2. Индуктор 1 содержит сердечник 3 с зубцами со спинкой4 сердечника и зубцами 5 и многофазную обмотку 6 в виде нескольких катушечных групп 6.1 … 6.N, где N – количество катушечных групп. Сердечник 3 выполнен из листов электротехнической стали или конструкционной стали.
Многофазная обмотка представляет собой катушечные группы 6, каждая из которых в свою очередь состоит из нескольких плоских концентрических катушек из медной проволоки, сформированных навиванием на спинку 4 сердечника 3 в пазах между зубцами 5 шириной 2с, которые могут быть выполнены шире спинки 4 сердечника. Охлаждение многофазной обмотки 6может быть выполнено воздушным (с помощью воздушной системы охлаждения 7, фиг. 1 и фиг. 2) или водяным (посредством подачи охлаждающей жидкости в медную трубку, из которой могут быть выполнены катушки).
Источник питания 2 состоит из входного звена, выпрямителя 12 (в частности, на основе тиристоров для пассивного выпрямителя (фиг. 17) или силовых IGBT-модулей для активного выпрямителя), звена постоянного тока 13 (емкостной не менее 24 мФ и индуктивный фильтры и брейк-модуль) и инвертора 14. Подключение источника питания 2 к индуктору выполнено силовым кабелем 8. Кабель может быть выполнен экранированным с заземлением и четным числом проводников, причем половина из указанных проводников соединена с началом катушечной группы 6, а другая половина из указанных проводников соединена с концом катушечной группы 6. Такое подключение уменьшают величину помех от кабеля 8 с тока на другие объекты, например, проложенные неподалеку сигнальные кабели и магнитные датчики.
По первому варианту исполнения электромагнитного перемешивателя катушечных групп 6может быть три и более (3,4 …N), причем крайние катушечные группы 6.1 и 6.N включены последовательно и встречно, число их витков W1 и WN меньше или равно числу витков центральных катушечных групп 6.2 … 6.N-1, а по длине сердечника 3 четные катушечные группы инвертированы относительно нечетных катушечных групп за счет направления навивки или схемы подключения.
По второму варианту исполнения электромагнитного перемешивателя катушечных групп 6 использовано только три (Z=3), крайние катушечные группы 6.1 и 6.3 имеют большее число витков W1 и W3, чем центральная катушечная группа 6.2 с числом витком W2, центральная катушечная группа инвертирована относительно крайних катушечных групп за счет направления навивки или схемы подключения, а катушечные группы соединены по схеме “звезда” или “треугольник” и подключены к средним точкам трех пар силовых ключей инвертора источника питания 2.
Согласно заявленному способу электромагнитный перемешиватель по одному из описанных выше вариантов исполнения устанавливают на расстоянии рабочего зазора Δ от поверхности расплава металла 9, под подиной печи 10 (фиг.1) или боковой стенкой ванны печи на расстоянии рабочего зазора Δ, или около стенки кристаллизующегося слитка 11 под кристаллизатором 12 в литейной машине с рабочим зазором Δ между противоположными индукторами и подключают к низкочастотному источнику питания 2 по заданной схеме. При включении низкочастотного источника питания 2 в многофазных обмотках индуктора 1 появляется низкочастотный электрический ток, при этом фазы тока задают таким образом, чтобы полюсное деление τ индуктора по магнитодвижущей силе катушечных групп 6 соответствовало (0,7-2,2)∙Δ∙π, суммарная ширина фазных зон катушечных групп χS по магнитным потокам составляла до 400°эл., а на активную длину l индуктора приходилось дробное или нечетное число пар магнитных полюсов индуктора. Смещенный в пространстве и времени ток в обмотках создает продольное бегущее и пульсирующее магнитные поля, которыми воздействуют на расплав металла 9 в ванне печи 10. Распространение магнитных потоков каждой из обмоток ограничено величиной полюсного шага τ'. Результирующий магнитный поток индуктора 1 образован магнитными потоками всех обмоток индуктора 1, как это показано на фиг. 4. Магнитный поток ФА пульсирует в радиальном направлении от оси катушки А – Х, ФВ – оси катушки В – Y, ФС – оси катушки C – Z. При этом зубцы 5 сердечника 3 служат концентраторами магнитного поля и направляют большую часть пульсирующих магнитных потоков в направлении расплава металла 9. Направленные вдоль оси обмоток магнитные потоки замкнуты по спинке4 сердечника и зубцам 5 сердечника 3, по рабочему зазору Δ и непосредственно по расплаву металла 9. Результирующий магнитный поток образует бегущее магнитное поле, волна которого движется вдоль оси индуктора со скоростью V1=2∙τ∙f, где τ – величина полюсного деления индуктора, f – частота питающего индуктор 1 напряжения. Магнитные потоки каждой из обмоток замкнуты в пределах одного полюсного деления. Переменный магнитный поток пронизывает расплав металла 9, наводя электродвижущую силу (ЭДС), которая, в свою очередь, приводит к возникновению тока. Взаимодействие переменного магнитного потока и токов в расплаве металла 9 создаёт электродинамические силы (нормальные Fn и тангенциальные Fτ по отношению к поверхности расплава в месте установки индуктора) и приводит расплав 9ванны печи 10 в движение, обеспечивая требуемый технологический эффект – гомогенизацию расплава 9 по химическому составу и температуре, а также ускорение плавления твердой шихты.
Каждая из обмоток охвачена не только собственным магнитным полем, но также магнитными потоками остальных обмоток в пределах одного полюсного деления. Так, например, в индукторе 1 на фиг. 4 в первом зубце 5 сердечника 3 суммируются магнитный поток обмотки фазы А и части магнитных потоков фаз В и С, и образуется суммарный поток Ф1. В остальных зубцах 5 наблюдается аналогичная картина. Потоки Ф1…ФN+1 на коронках зубцов 5 не включают потоки рассеяния, которые составляют значительную часть для индуктора 1 с обмотками 6, навитыми через спинку 4 сердечника 3. Величина магнитного потока определяет значение магнитной индукции материала сердечника 3 и относительную магнитную проницаемость, а так же индуктивное сопротивление обмоток 6. При равной линейной токовой нагрузке индуктора 1 величина магнитного потока разных участков сердечника 3 различна и определяется обмоточными данными многофазной обмотки 6 индуктора 1, фазами и амплитудами тока в катушечной группе. При этом величины магнитных потоков будут определяться величиной МДС катушечных групп, степенью насыщения магнитопровода и соотношением величины рабочего зазора Δ и величины полюсного деления индуктора. На фиг. 4 слева показана векторная диаграмма МДС катушечных групп и магнитных потоков на выходе из зубца 5 для индуктора с тремя катушечными группами на длину и числом пар магнитных полюсов AZB. Фазовый сдвиг между МДС на векторной диаграмме составляет 60°эл. А потоки на выходе из зубцов Ф1, Ф2, Ф3 и Ф4 сдвинуты на большие градусы, чем 60°эл., и в сумме составляют около 276°эл., что происходит в силу разомкнутости сердечника плоского индуктора и краевых эффектов.
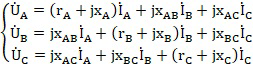
Кроме того, что потоки в пределах полюсного деления индуктора складываются, на электромагнитные процессы в индукторе оказывает влияние эффект переноса мощности между обмотками разных фаз многофазной обмотки 6, что обусловлено наличием взаимной индуктивности обмоток разных фаз и малым числом полюсов, когда катушечные группы разных фаз находятся в неравнозначных условиях по длине сердечника 3 при малом числе полюсов в силу неодинакового взаимного положения катушечных групп, что в итоге приводит к существенной несимметрии нагрузки в виде малополюсного плоского индуктора для источника питания. Например, для трехзонного индуктора с чередованием фаз в катушечных группах AZB (см. фиг. 3) будет характерна следующая система уравнений для напряжений многофазной обмотки:
 , (1)
, (1)
где UA, UB, UC – напряжения обмоток фаз А, В, С;
IA, IB, IC – токи в обмотках с фаз А, В, С;
rA, rB, rC – активные сопротивления фаз А, В, С;
xA, xB, xC – реактивные сопротивления фаз А, В, С;
xAB, xBC, xCA – взаимно индуктивные сопротивления обмоток разных фаз.
Из-за того, что взаимные индуктивности xAB и xBC существенно выше взаимной индуктивности xCA в этой системе, при включении индуктора к симметричной системе ЭДС с равной амплитудой и сдвинутыми на 120°эл. фазами напряжений, фазы тока существенно отличаются от 120°эл. в силу наличия взаимной индуктивности. Создать более симметричную систему токов, МДС и магнитных потоков можно используя на каждую катушечную группу две отдельных пары силовых полупроводниковых ключей с возможностью задания определенной величины амплитуды и фазы напряжения, учитывающей взаимную индуктивность разных фаз, продольные и краевые эффекты в плоском индукторе. Однако такой способ приводит к несимметрии напряжений и ограничивает величину напряжений для заданной нагрузки.
Предлагаемые индукторы с расщепленными обмотками по схемам подключения AZBX (см. фиг. 11) и ABX (см. 8) представляют собой значительно более симметричную нагрузку, чем трехзонный индуктор по схеме AZB (см. фиг. 3). Дело в том, что две катушечные группы на концах стержня по длине, включенные последовательно и встречно, имеют один и тот же ток, но две катушечные группы фазы A в одинаковой степени подвержены воздействию магнитных потоков фаз B и C, но поскольку они в противофазе, то мощность, переданная в одну катушечную группу, равна по величине, но противоположна по фазе, чем переданная в другую. То есть перенос мощности крайних катушечных групп компенсирует друг друга для двух частей обмотки фазы А. А система уравнений для четырехзонного индуктора с чередованием фаз в катушечных группах AZBX (см. фиг. 11) будет иметь вид:
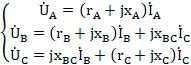 . (2)
. (2)
Очевидно, что система уравнений (2) соответствует существенно более симметричной нагрузке, чем система уравнений (1). Поэтому индукторы с расщепленной обмоткой существенно более выгодны, чем индукторы по схеме AZB с точки зрения симметрии, стабилизации работы и условий работы источника питания.
Улучшить симметрию токов в трехфазном индукторе пофиг. 3 можно выполнением неодинакового числа витков W по фазам, что приводит к результату, представленному фиг. 4, и возможности включения индуктора 1 к общепромышленному частотному преобразователю для стандартных асинхронных двигателей. При этом емкость на шине постоянного тока частотного преобразователя должна быть подобрана таким образом, чтобы обеспечить безаварийную остановку электромагнитного перемешивателя в режиме экстренного торможения без критического перенапряжения на конденсаторах шины постоянного тока.
При подключении каждой отдельной катушечной группы к отдельным двум парам силовых полупроводниковых ключей существует возможность настроить такой фазовый сдвиг в МДС смежных катушек, чтобы согласовать величину полюсного деления индуктора по магнитному потоку с длиной индуктора, числом катушечных групп и величиной рабочего зазора, как это показано на фиг. 29. Для трехзонного и четырехзонного индуктора существует оптимальная величина сдвига фаз между МДС смежных обмоток, обеспечивающая максимальное усилие на расплав. Вариант подключения трехзонного индуктора с тремя катушечными группами на длину от шести пар силовых полупроводниковых ключей представлен на фиг. 18, где три катушечные группы подключены к трем стандартным силовым сборкам инвертора с тремя парами силовых ключей Ai, где i=1…6 – номер пары силовых ключей VTj. Существует способ получения максимального усилия на расплав и симметрии нагрузки источника питания при задании рациональных МДС катушечных групп путем обеспечения заданного сдвига фаз токов катушечных групп по длине индуктора по сигналу обратной связи от датчиков магнитного потока, размещенных на зубцах индуктора.
Также задавая неодинаковую величину сдвига фаз в смежных катушечных группах по длине можно частично компенсировать входной и выходной краевые эффекты. Также компенсировать данные эффекты можно разместив дополнительные катушечные группы по длине сердечника в его начале и конце как это показано на фиг. 7.
Лучшим решением является выбор такой длины индуктора для заданного рабочего зазора, чтобы получить максимальное усилия на расплав на стандартных углах фазового сдвига МДС 60°эл. Такие длины индуктора представлены для различных рабочих зазоров представлены на фиг. 30. В этом случае трехфазный индуктор можно подключать к общепромышленному полупроводниковому преобразователю частоты (фиг. 17), например, по схеме для трехзонного индуктора (см. фиг. 19, фиг. 20, фиг. 22) или для четырехзонного индуктора для схемы AZBX – фиг. 21.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Заявленная группа изобретений была испытана с помощью различных методов, в том числе на физических моделях вариантов электромагнитных перемешивателей в масштабе 1:10, на испытательной площадке с воздействием индуктором на силоизмерительный стенд и в виде действующих опытно-промышленных установок, установленных на действующих печах и миксерах. Наиболее достоверную информацию об эффективности электромагнитного перемешивания может дать анализ серии проб из печи через определенное время с использованием теории планирования эксперимента в металлургии. Однако проведение таких исследований на нескольких модификациях устройств затруднительно. В этой связи оценка эффективности перемешивания расплава металла производилась путем оценки скорости перемешивания расплава в зоне магнитного поля индуктора, интегральной силы Fτ на расплав, отношения тангенциальной силы к мощности индуктора и к массе индуктора (Fτ / Piи Fτ / mi), которые были получены в результате расчетов, измерений работы электромагнитного перемешивателя на холостом ходу и путем воздействия на силоизмерительный стенд и лишь в отдельных случаях верифицировались по времени растворения лигатурных добавок в действующих миксерах.
Основные реализованные варианты представлены в таблице 1 и таблице 2 для индуктора длиной 2200 мм при рабочем зазоре 550 мм и индуктора длиной 2500 мм при рабочем зазоре 700 мм, соответственно. Индукторы длиной 2200 мм и 2500 мм выполнены с многофазными обмотками с четырьмя катушечными группами и тремя катушечными группами. Величина и фазы токов задавалась отдельно для каждой катушечной группы от источника питания с двумя отдельными парами силовых полупроводниковых ключей. Скорость расплава в зоне действия магнитного поля индуктора определена расчетным путем, поскольку в настоящее время отсутствуют достоверные способы определения скорости течения высокотемпературного и агрессивного расплава алюминия в печи.
Анализ данных в таблицах 1 и 2 показывает, что при рабочем зазоре Δ=550 мм оптимальным является использование электромагнитного перемешивателя, обеспечивающего получение дробного числа пар магнитных полюсов на активную длину индуктора, а именно 2p=4/3 со схемой подключения AZBX, при рабочем зазоре Δ=700 мм оптимальным является использование электромагнитного перемешивателя, обеспечивающего получение целого числа пар магнитных полюсов на активную длину индуктора, а именно 2p=1 cо схемой подключения ABX. Индуктор длиной l=2200 мм с числом пар магнитных полюсов 2p=4/3 со схемой подключения AZBX на рабочем зазоре Δ=550 мм показал величину тангенциального усилия 647 Н и скорость расплава в зоне действия магнитного поля индуктора 2,48 м/сек. Отношение тангенциальной силы к мощности индуктора 8,32 Н / кВт и отношение тангенциальной силы к массе индуктора 134 Н / тн показывают наибольшую эффективность по сравнению с другими вариантами исполнения многофазной обмотки. Величина “отношение полюсного деления к величине π∙Δ” равная 0,95 входит в заявленный диапазон от 0,7 до 2,2. Вариант с 2р=2 и схемой подключения ABXY имеет τ/(π∙Δ)=0,64, что за пределами диапазона 0,7-2,2 и имеет низкие характеристики.
Таблица 1 – Примеры осуществления изобретения при выполнении индуктора длиной 2200 мм при рабочем зазоре 550 мм
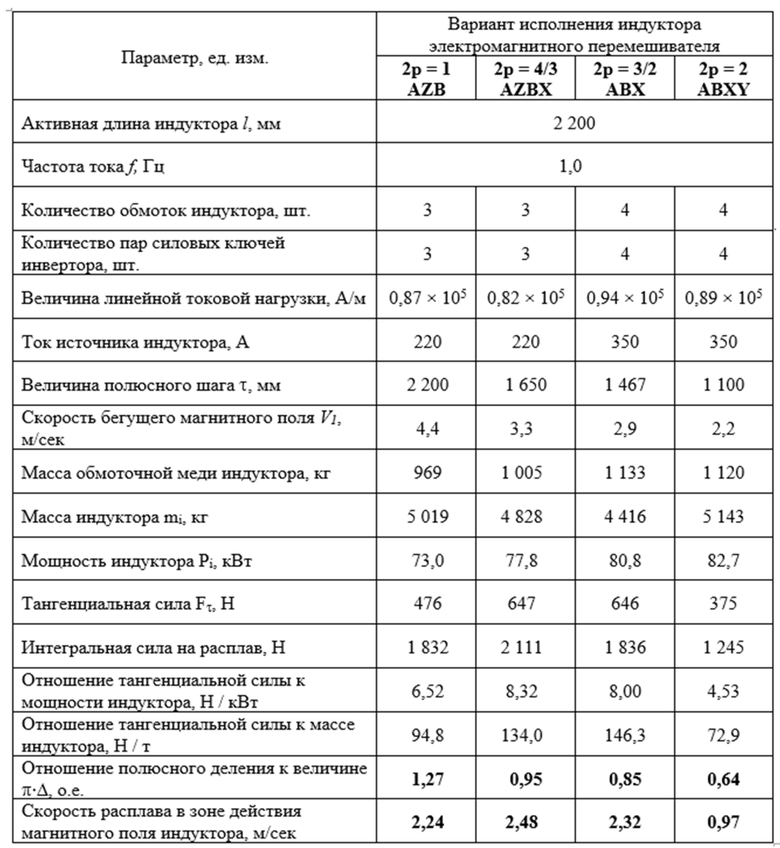
Таблица 2 –Примеры осуществления изобретения при выполнении индуктора длиной 2500 мм при рабочем зазоре 700 мм
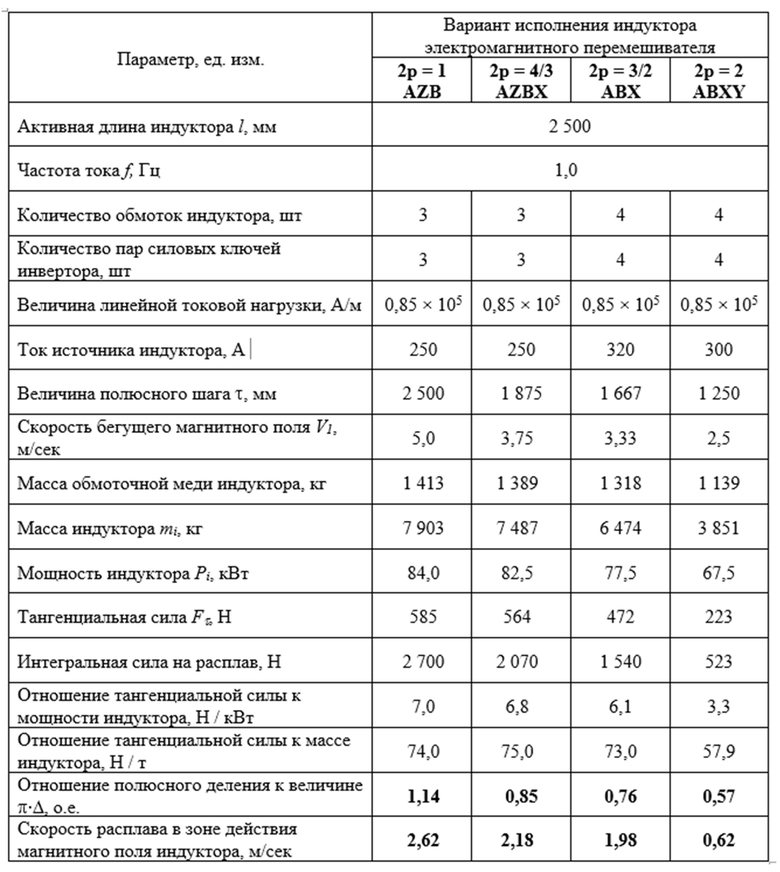
Индуктор длиной l = 2500 мм с числом пар магнитных полюсов 2p = 1 со схемой подключения AZB на рабочем зазоре Δ = 700 мм показал величину тангенциального усилия 585 Н и скорость расплава в зоне действия магнитного поля индуктора 2,62 м/сек. Отношение тангенциальной силы к мощности индуктора 7 Н / кВт и отношение тангенциальной силы к массе индуктора 74 Н / т показывают наибольшую эффективность по сравнению с другими вариантами исполнения многофазной обмотки. Величина “отношение полюсного деления к величине π∙Δ” равная 1,14 входит в заявленный диапазон от 0,7 до 2,2.
Размещение индуктора длиной l = 2500 мм с числом пар магнитных полюсов 2p = 1 со схемой подключения AZB на рабочем зазоре Δ = 550 мм не позволить получить увеличение скорости расплава в зоне действия магнитного поля индуктора относительно индуктора длиной l = 2200 мм с числом пар магнитных полюсов 2p = 4/3 со схемой подключения AZBX, но снизит параметры “отношение тангенциальной силы к мощности индуктора” и “отношение тангенциальной силы к массе индуктора”, потому что усилие на расплав под действием индуктора и скорость расплава в зоне действия магнитного поля индуктора не увеличатся. Это обусловлено тем, что для каждой конструкции индуктора существует определенный предел возможной скорости расплава и, следовательно, сила, действующая на расплав металла при использовании плоского индуктора бегущего продольного магнитного поля, который является линейным асинхронным двигателем, уменьшается. Поэтому индуктор длиной l = 2200 мм с числом пар магнитных полюсов 2p = 4/3 со схемой подключения AZBX считается оптимальным и достаточным для электромагнитного перемешивания расплава в печи с рабочим зазором Δ = 550 мм, хотя, если позволяют габариты индуктора, то можно применить индуктор длиной l = 2500 мм и больше.
Индукторы по схемам подключения AZB и AZBX включались не только от источника питания с двумя отдельными парами силовых полупроводниковых ключей, но и от общепромышленных полупроводниковых источников питания с тремя парами силовых полупроводниковых ключей по схемам “звезда” и “треугольник”, что в отдельных случаях уменьшало или увеличивало тангенциальное усилие на измерительном стенде из-за изменения фазового сдвига α с 60°эл. до 49-52°эл., которые в отдельных случаях были ближе или дальше от оптимальных величин, но в целом не меняющие общую картину.
Использование способа перемешивания расплава металла и вариантов конструкции электромагнитного перемешивателя позволяет повысить эффективность перемешивания расплава металла при наименьших энергетических затратах, малой массе индуктора электромагнитного перемешивателя и его габаритных размеров за счет оптимизации обмоточных данных при заданной величине рабочего зазора Δ между индуктором и поверхностью перемешиваемого расплава металла при возможности использования общепромышленных полупроводниковых источников питания.
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ И ОБОЗНАЧЕНИЙ
Δ – расстояние между активной поверхностью индуктора и перемешиваемым расплавом (рабочий зазор);
m – число фаз многофазной обмотки индуктора;
p – число пар полюсов индуктора;
2p – число полюсов индуктора;
Z – число зубцов сердечника;
q – число пазов сердечника на полюс и фазу;
α – фазная зона индуктора (по разнице фаз токов в соседних катушечных группах);
χ – ширина фазной зоны индуктора по суммарному магнитному потоку на дину индуктора;
χS = χ1+χ1+…+χN , где N – число катушечных групп индуктора -сумма величин ширины фазных зон магнитного потока катушечных групп;
τ – величина магнитного полюсного деления индуктора по МДС определяется выражением τ = l/ 2p;
τ' – величина магнитного полюсного деления индуктора, на которой магнитный поток на коронках зубцов изменяется на 180°эл., который для индуктора с нечетным и дробным числом магнитным полюсов определяется выражением τ = 180°эл. / χS;
Q – число катушек в фазной зоне индуктора;
β – относительный шаг многофазной обмотки;
Wi – число витков катушечной группы номер i;
kcu – коэффициент заполнения паза медью;
V1 – синхронная скорость бегущего магнитного поля индуктора;
kоб – обмоточный коэффициент;
2c – активная ширина индуктора;
l – активная длина индуктора;
Aa–Xx – обозначение начала и конца обмотки фазы А, равная 0°эл.;
Bb–Yy – обозначение начала и конца обмотки фазы B, равная 120°эл.;
Cc–Zz – обозначение начала и конца обмотки фазы C, равная 240°эл.;
AZB (аналог AYC) – схема подключения трех катушечных групп трехфазного индуктора с шириной фазной зоны 60°эл.;
AZBX – схема подключения четырех катушечных групп трехфазного индуктора с шириной фазной зоны 60°эл.;
ABX – схема подключения трех катушечных групп двухфазного индуктора с шириной фазной зоны 90°эл.;
ABXY – схема подключения четырех катушечных групп двухфазного индуктора с шириной фазной зоны 90°эл.;
Fτ – суммарное тангенциальное усилие бегущего магнитного поля на расплав в печи, проекция силы на ось, совпадающую с бегущим магнитным полем;
Fn – суммарное нормальное усилие переменного магнитного поля на расплав в печи, проекция силы на ось, нормальную к стенке с расплавом в месте установки инуктора;
mi – масса индуктора;
Pi – установленная мощность индуктора;
МДС – магнитодвижущая сила;
ЭДС – электродвижущая сила;
ШИМ – широтно-импульсная модуляция;
B1, B2, B3 – диодно-тиристорные модули выпрямителя источника питания;
VS1, VS2, VS3 – тиристоры;
VD1, VD2, VD3 – диоды;
Lf – дроссель на шине постоянного тока;
Cf – конденсатор на шине постоянного тока;
VT7 – силовой ключ для управления рассеянием энергии на тормозном резисторе;
Rb – тормозной резистор;
A1, A2, A3 – пара полупроводниковых ключей инвертора;
VT1…VT6 – полупроводниковый ключ инвертора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОЗДЕЙСТВИЯ ЭЛЕКТРОМАГНИТНЫМ ПОЛЕМ НА РАСПЛАВ МЕТАЛЛА И ИНДУКТОР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2759178C2 |
| ЯКОРЬ МНОГОФАЗНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 1996 |
|
RU2121207C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2339147C1 |
| ТОРЦЕВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2013 |
|
RU2541427C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2401499C1 |
| СИНХРОННЫЙ РЕАКТИВНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2014 |
|
RU2551640C1 |
| Индуктор линейной индукционной машины | 2018 |
|
RU2683596C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2231202C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
Изобретения относятся к области металлургии и электротехники, в частности к устройствам для перемешивания расплавов металлов. В способе задают фазы тока на подключенные катушечные группы таким образом, чтобы полюсное деление индуктора по магнитодвижущей силе катушечных групп соответствовало (0,7-2,2)∙Δ∙π, суммарная ширина фазных зон катушечных групп по магнитным потокам составляла до 400°эл., а на активную длину индуктора приходилось дробное или нечетное число пар магнитных полюсов индуктора, но не более 2. В электромагнитном перемешивателе число витков крайних катушечных групп больше числа витков центральной катушечной группы, центральная катушечная группа инвертирована относительно крайних катушечных групп за счет направления навивки или подключения, а катушечные группы соединены по схеме “звезда” или “треугольник” и подключены к средним точкам трех пар силовых ключей инвертора источника питания, либо крайние катушечные группы включены последовательно и встречно, при этом число витков крайних катушечных групп меньше или равно числу витков центральных катушечных групп, а по длине сердечника четные катушечные группы инвертированы относительно нечетных катушечных групп за счет направления навивки или схемы подключения. Изобретения позволяют оптимизировать обмоточные данные при заданной величине рабочего зазора Δ между индуктором и поверхностью перемешиваемого расплава металла, а также возможность использования полупроводниковых источников питания с тремя парами силовых полупроводниковых ключей инвертора и, следовательно, повысить эффективность перемешивания при наименьших энергетических затратах, малой массе индуктора электромагнитного перемешивателя и его габаритных размеров. 3 н. и 30 з.п. ф-лы, 30 ил., 2 табл.
1. Способ перемешивания расплава металла, включающий использование электромагнитного перемешивателя, размещение индуктора, подключенного к низкочастотному источнику питания, на расстоянии рабочего зазора Δ от поверхности расплава металла, создание продольного бегущего и пульсирующего магнитных полей и воздействие указанными магнитными полями на расплав металла, отличающийся тем, что задают фазы тока на подключенные катушечные группы таким образом, чтобы полюсное деление индуктора по магнитодвижущей силе катушечных групп соответствовало (0,7-2,2)∙Δ∙π, суммарная ширина фазных зон катушечных групп по магнитным потокам составляла до 400°эл., а на активную длину индуктора приходилось дробное или нечетное число пар магнитных полюсов индуктора, причем не более 2.
2. Способ по п. 1, отличающийся тем, что катушечные группы подключают к отдельным двум парам силовых полупроводниковых ключей инвертора низкочастотного источника питания.
3. Способ по п. 2, отличающийся тем, что формируют различные по фазе и амплитуде магнитодвижущие силы центральных и боковых катушечных групп таким образом, чтобы разница фаз магнитодвижущих сил катушечных групп соответствовала 60°эл. или 90°эл.
4. Способ по п. 2, отличающийся тем, что задают фазы тока и амплитуды тока каждой катушечной группы отличными от фазы тока и амплитуды тока соответствующих смежных катушечных групп.
5. Способ по п. 2, отличающийся тем, что формируют сдвиг фаз токов катушечных групп по сигналу обратной связи от датчиков магнитного потока, размещенных на зубцах индуктора.
6. Способ по п. 1, отличающийся тем, что используют индуктор с тремя катушечными группами на активную длину, подключают каждую катушечную группу к средней точке трех отдельных пар силовых полупроводниковых ключей инвертора низкочастотного источника питания по схеме “звезда” или “треугольник” и формируют различные по фазе и амплитуде магнитодвижущие силы центральных и боковых катушечных групп таким образом, чтобы ширина фазной зоны каждой катушечной группы по магнитодвижущей силе соответствовала или была меньше 60°эл.
7. Способ по п. 1, отличающийся тем, что используют индуктор с четырьмя катушечными группами на активную длину, подключают каждую катушечную группу к средней точке трех отдельных пар силовых полупроводниковых ключей инвертора низкочастотного источника питания по схеме “звезда” или “треугольник” и задают фазы тока таким образом, чтобы на активную длину индуктора приходилось дробное число пар магнитных полюсов индуктора 2p=4/3, а ширина фазной зоны каждой катушечной группы по магнитодвижущей силе соответствовала или была меньше 60°эл.
8. Способ по п. 1, отличающийся тем, что используют индуктор с тремя катушечными группами на активную длину, подключают крайние катушечные группы к средним точкам двух пар силовых полупроводниковых ключей инвертора низкочастотного источника питания, подключают центральную катушечную группу к средним точкам других двух пар силовых полупроводниковых ключей инвертора низкочастотного источника питания, задают фазы тока таким образом, чтобы на активную длину индуктора приходилось дробное число пар магнитных полюсов индуктора 2p=3/2, а ширина фазной зоны каждой катушечной группы по магнитодвижущей силе соответствовала 90°эл.
9. Способ по п. 1, отличающийся тем, что используют индуктор с тремя катушечными группами на активную длину, при установке на печь и подключении к трехфазному или двухфазному источнику питания и в зависимости от числа фаз источника питания выбирают схему подключения катушечных групп таким образом, что подключают катушечные группы к средним точкам трех пар силовых полупроводниковых ключей инвертора низкочастотного источника питания по схеме “звезда” или “треугольник” и формируют различные по фазе и амплитуде магнитодвижущие силы центральных и боковых катушечных групп так, чтобы ширина фазной зоны каждой катушечной группы по магнитодвижущей силе соответствовала или была меньше 60°эл., или подключают крайние катушечные группы к средним точкам двух пар силовых ключей инвертора низкочастотного источника питания, подключают центральную катушечную группу к средним точкам других двух пар силовых полупроводниковых ключей инвертора низкочастотного источника питания, задают фазы тока такими, чтобы на активную длину индуктора приходилось дробное число пар магнитных полюсов индуктора 2p=3/2, а ширина фазной зоны каждой катушечной группы по магнитодвижущей силе соответствовала 90°эл., для чего на катушечных группах индуктора предусмотрены дополнительные электрические контакты для подстройки нагрузки под ту или иную схему включения.
10. Способ по п. 1, отличающийся тем, что создают комбинацию магнитных потоков путем формирования на многофазной обмотке источником питания периодического напряжения, содержащего спектр из основной гармоники и дополнительных гармоник симметричных трехфазных систем напряжений прямой или обратной последовательности.
11. Способ по п. 1, отличающийся тем, что перемешивание осуществляют циклично, при этом цикл включает одну смену направления движения бегущего магнитного поля и в каждом цикле после смены направления движения бегущего магнитного поля изменяют частоту и величину напряжения на многофазной обмотке.
12. Способ по п. 11, отличающийся тем, что длительность воздействия бегущим магнитным полем одного направления составляет 2-4 мин.
13. Способ по п. 1, отличающийся тем, что используют низкочастотный источник питания, включающий выпрямитель на базе IGBT-модулей, при создании продольного бегущего и пульсирующего магнитных полей управляют последовательностью импульсов для каждого плеча IGBT-модуля в течение всего периода, которые согласованы с импульсами управления инвертором на базе IGBT-модулей.
14. Способ по п. 1, отличающийся тем, что используют низкочастотный источник питания, включающий инвертор на базе IGBT-модулей, при этом при создании продольного бегущего и пульсирующего магнитных полей управляют импульсами с частотой ШИМ-модуляции менее 1000 Гц.
15. Электромагнитный перемешиватель для перемешивания расплава металла по п.1, содержащий индуктор и соединенный с ним низкочастотный источник питания, при этом индуктор включает разомкнутый сердечник с зубцами и многофазную обмотку из трех катушечных групп, расположенную в пазах между зубцами сердечника с охватом спинки сердечника, при этом число витков крайних катушечных групп больше числа витков центральной катушечной группы, центральная катушечная группа инвертирована относительно крайних катушечных групп за счет направления навивки или подключения, а катушечные группы соединены по схеме “звезда” или “треугольник” и подключены к средним точкам трех пар силовых полупроводниковых ключей инвертора низкочастотного источника питания.
16. Электромагнитный перемешиватель по п.15, отличающийся тем, что он содержит по меньшей мере две дополнительные катушечные группы, расположенные на сердечнике после крайних катушечных групп относительно середины сердечника.
17. Электромагнитный перемешиватель по п.15, отличающийся тем, что зубцы сердечника выполнены шире спинки сердечника.
18. Электромагнитный перемешиватель по п.15, отличающийся тем, что стержень сердечника имеет переменное в продольном направлении поперечное сечение.
19. Электромагнитный перемешиватель по п.15, отличающийся тем, что спинка сердечника выполнена из электротехнической стали, а зубцы - из конструкционной стали.
20. Электромагнитный перемешиватель по п.15, отличающийся тем, что источник питания на шине постоянного тока содержит емкость более 30 мФ.
21. Электромагнитный перемешиватель по п.15, отличающийся тем, что индуктор соединен с низкочастотным источником питания силовым экранированным кабелем с четным числом проводников, при этом половина проводников соединена с началом катушечных групп, а другая половина проводников соединена с концом катушечных групп.
22. Электромагнитный перемешиватель для перемешивания расплава металла по п.1, содержащий индуктор и соединенный с ним низкочастотный источник питания, при этом индуктор включает разомкнутый сердечник с зубцами и многофазную обмотку из по меньшей мере трех катушечных групп, расположенную в пазах между зубцами сердечника с охватом спинки сердечника, при этом крайние катушечные группы включены последовательно и встречно, причем число витков крайних катушечных групп меньше или равно числу витков центральных катушечных групп, а по длине сердечника четные катушечные группы инвертированы относительно нечетных катушечных групп за счет направления навивки или схемы подключения.
23. Электромагнитный перемешиватель по п.22, отличающийся тем, что он содержит по меньшей мере две дополнительные катушечные группы, расположенные на сердечнике после крайних катушечных групп относительно середины сердечника.
24. Электромагнитный перемешиватель по п.22, отличающийся тем, что зубцы сердечника выполнены шире спинки сердечника.
25. Электромагнитный перемешиватель по п.22, отличающийся тем, что индуктор включает три катушечные группы, инвертор низкочастотного источника питания содержит четыре пары силовых полупроводниковых ключей, при этом центральная катушечная группа соединена со средними точками первых двух пар силовых полупроводниковых ключей, а крайние катушечные группы подключены ко вторым двум парам силовых полупроводниковых ключей.
26. Электромагнитный перемешиватель по п.22, отличающийся тем, что индуктор включает четыре катушечные группы, включенные к средним точкам трех пар силовых полупроводниковых ключей инвертора низкочастотного источника питания по схеме “треугольник”, при этом крайние катушечные группы подключены в одно плечо “треугольника”, вторая по длине сердечника катушечная группа подключена во второе плечо “треугольника”, а третья по длине сердечника катушечная группа подключена в третье плечо “треугольника”.
27. Электромагнитный перемешиватель по п.22, отличающийся тем, что индуктор включает четыре катушечные группы, подключенные к средним точкам трех пар силовых полупроводниковых ключей инвертора низкочастотного источника питания по схеме “звезда”, при этом крайние катушечные группы подключены к одной фазе “звезды”, вторая по длине сердечника катушечная группа подключена ко второй фазе “звезды”, а третья по длине сердечника катушечная группа подключена к третьей фазе “звезды”, а нулевая точка «звезды» соединена со средней точкой двух соединенных последовательно конденсаторов на шине постоянного тока низкочастотного источника питания.
28. Электромагнитный перемешиватель по п.22, отличающийся тем, что стержень сердечника имеет переменное в продольном направлении поперечное сечение.
29. Электромагнитный перемешиватель по п.22, отличающийся тем, что поперечное сечение центральной части стержня сердечника, на которой размещены центральные катушечные группы, больше поперечного сечения крайних частей стержня, на которых размещены крайние катушечные группы.
30. Электромагнитный перемешиватель по п.22, отличающийся тем, что спинка сердечника выполнена из электротехнической стали, а зубцы - из конструкционной стали.
31. Электромагнитный перемешиватель по п.22, отличающийся тем, что низкочастотный источник питания содержит активный управляемый выпрямитель на основе силовых IGBT-модулей.
32. Электромагнитный перемешиватель по п.22, отличающийся тем, что низкочастотный источник питания на шине постоянного тока содержит емкость более 30 мФ.
33. Электромагнитный перемешиватель по п.22, отличающийся тем, что индуктор соединен с низкочастотным источником питания силовым экранированным кабелем с четным числом проводников, при этом половина проводников соединена с началом катушечных групп, а другая половина проводников соединена с концом катушечных групп.
| WO 2014155357 A1, 02.10.2014 | |||
| Проходной аппарат для крашения волокнистых материалов | 1958 |
|
SU118485A1 |
| ПЕЧЬ-МИКСЕР | 2013 |
|
RU2543022C1 |
| МАГНИТОГИДРОДИНАМИЧЕСКИЙ МГД-ПЕРЕМЕШИВАТЕЛЬ ДЛЯ МЕТАЛЛУРГИЧЕСКИХ ПЕЧЕЙ | 1988 |
|
RU1642828C |
| US 5563904 A1,08.10.1996. | |||

