ОБЛАСТЬ ТЕХНИКИ ДАННОГО ИЗОБРЕТЕНИЯ
Настоящее изобретение, в основном, относится к системе приведения в действие для активного ортеза - или экзоскелета, - поддерживающего тазобедренный сустав.
Уровень техники
Как известно уже давно, средний возраст населения планеты существенно вырос. Моторные расстройства, обусловленные старением, предполагают сценарий будущего, в котором людей, нуждающихся в помощи в передвижении, - в особенности, ходьбе и видах деятельности, связанных с выполнением их ежедневных действий по самообслуживанию, даже дома, - будет становиться больше и больше.
Роботизированные ортезы данного типа, также известные как экзоскелеты, представляют собой перспективное решение для помощи людям - пожилым или нет, - живущим с двигательными дефектами. Данные ортезы обычно имеют антропометрическую форму и «изнашиваются» объектом. В целях активной помощи, указанные ортезы могут включать в себя группу приведения в действие, которая генерирует механическую энергию и передает ее пораженному сегменту сустава, зачастую, тазобедренному суставу пользователя.
Несколько авторов (А.Б. Зосс (A. B. Zoss), Х. Казеруни (H. Kazerooni): ʺБиомеханическая конструкция нижней конечности по Беркли, Экзоскелет - BLEEXʺ; IEEE/АОИМ Транзакции по Мехатронике, том 11, № 2, апрель 2006г.) описывают экзоскелет, оснащенный гидравлическим приводом для создания крутящего момента сгибания-разгибания тазобедренного сустава. Данный привод располагается латерально к телу пользователя, в соответствии с бедренной костью. Однако, такое расположение ведет к увеличению нагрузки на сегмент сустава, о котором идет речь, которое имеет следствием увеличение возможной слабости. Более того, центр тяжести всей структуры находится ниже, чем физиологический центр тяжести.
Также, в документе US 2011/166489 говорится об активном ортезе тазобедренного сустава, содержащем группу гидравлического приведения в действие, располагающуюся сзади тела пользователя.
Ортезы/экзоскелеты известного типа, упомянутые выше, имеют некоторые недостатки или нерешенные потребности.
Во-первых, структура ортеза должна быть соответствующей степеням свободы, угловым экстензиям и в целом кинематике суставов тела, в том числе, тем, которым не оказывается помощь.
Более того, указанный ортез должен быть способен адаптироваться под антропометрию объекта и воплощать, в конечном счете, удобный и кинематически эффективный интерфейс человек-робот.
В дополнение, вышесказанное должно быть достигнуто при ограниченной технической сложности указанного ортеза, также ради его надежности.
В заключение, более критичными аспектами, которые могут быть оптимизированы, также в отношении других требований, указанных выше, являются:
- расположение элементов приводного устройства относительно тела объекта,
- механизм передачи вспомогательного действия,
- вышеупомянутые количество и расположение пассивных степеней свободы,
- количество и расположение средств адаптации ортеза к антропометрии различных пользователей (данная функция имеет особую важность, когда разным объектам приходится пользоваться одной и той же ортопедической системой).
Сущность изобретения
Техническая проблема, которую формулирует и решает настоящее изобретение, следовательно, состоит в предоставлении системы приведения в действие ортеза тазобедренного сустава, которая позволяет устранить вышеуказанные недостатки, с учетом известного уровня техники.
Данная проблема решается посредством системы приведения в действие по п.1. В частности, данное изобретение предлагает монолатеральную систему приведения в действие для активного ортеза тазобедренного сустава, предназначенного для содействия движению сгибания-разгибания тазобедренного сустава.
Данное изобретение также предлагает ортез или экзоскелет по п.12, а именно, ортез, включающий в себя указанную систему приведения в действие, в частности, так называемый «Активный Ортез Таза» (англ. "Active Orthosis Pelvis" (APO)).
Указанный активный ортез, согласно данному изобретению, может обеспечить вспомогательные пары для сгибания-разгибания на одном или обоих тазобедренных суставах пользователя.
В настоящем контексте, для ортеза предполагается именно структура экзоскелета, которая распространяется на тазобедренный сустав, в частности, на таз и по меньшей мере на часть нижних конечностей пользователя.
Предпочтительные признаки настоящего изобретения являются предметом зависимых пунктов Формулы изобретения.
Система приведения в действие, согласно данному изобретению, имеет ограниченные латеральные размеры, позволяющие объекту свободно совершать движения так называемого «взмаха» руками. Столь ограниченная латеральная помеха является результатом расположения приводного устройства, такого как вращающийся исполнительный механизм, с задней стороны самой системы (то есть со спины пользователя).
Такая система приведения в действие дает пользователю возможность свободно выполнять движения разведения-приведения и, предпочтительно, вращения тазобедренного сустава внутрь и наружу, путем осуществления «плавающей» конфигурации для самого приводного устройства.
Кроме того, предпочтительно, указанная система выполнена с возможностью приспосабливаться к различным антропометриям объекта. В частности, указанная система включает в себя устройство трансмиссии, расположенное по существу параллельно сагиттальной плоскости тела пользователя и имеющее регулируемый продольный размер, чтобы позволить выбирать расстояние между приводным устройством и связующим звеном, которое передает вспомогательную пару сегменту сустава бедра.
Весьма предпочтительно, когда система приведения в действие сконфигурирована таким образом, чтобы ее собственная ось сгибания-разгибания тазобедренного сустава и ее собственная ось разведения-приведения тазобедренного сустава были инцидентны в точке, которая соответствует, во время эксплуатации, центру головки бедренной кости пользователя. Это достигается, в частности, путем вышеупомянутого регулирования продольного удлинения указанного устройства трансмиссии и посредством соответствующей возможности регулирования ширины указанной системы приведения в действие на фронтальной плоскости тела пользователя.
Данное изобретение является эффективным в содействии многим видам физической активности, в особенности, ходьбе по поверхности на уровне земли и вверх/вниз, подъему/спуску по ступеням, переходу от сидячего положения к стоячему ("sit-to-stand") или наоборот, и в целом двигательным видам деятельности для реабилитации нижних конечностей.
Система приведения в действие, согласно данному изобретению, делает ортез идеально совместимым со степенями свободы, угловыми экстензиями и в целом кинематикой суставов тела пользователя, включая пассивные суставы.
В дополнение, указанная система выполнена с обеспечением соответствия малозатратной реализации и низкой технической сложности.
Другие преимущества, признаки и режимы работы настоящего изобретения будут очевидны из нижеследующего подробного описания некоторых вариантов его осуществления, взятых в качестве примера, а не для ограничения.
Краткое описание чертежей
Далее упоминаются прилагаемые чертежи, на которых:
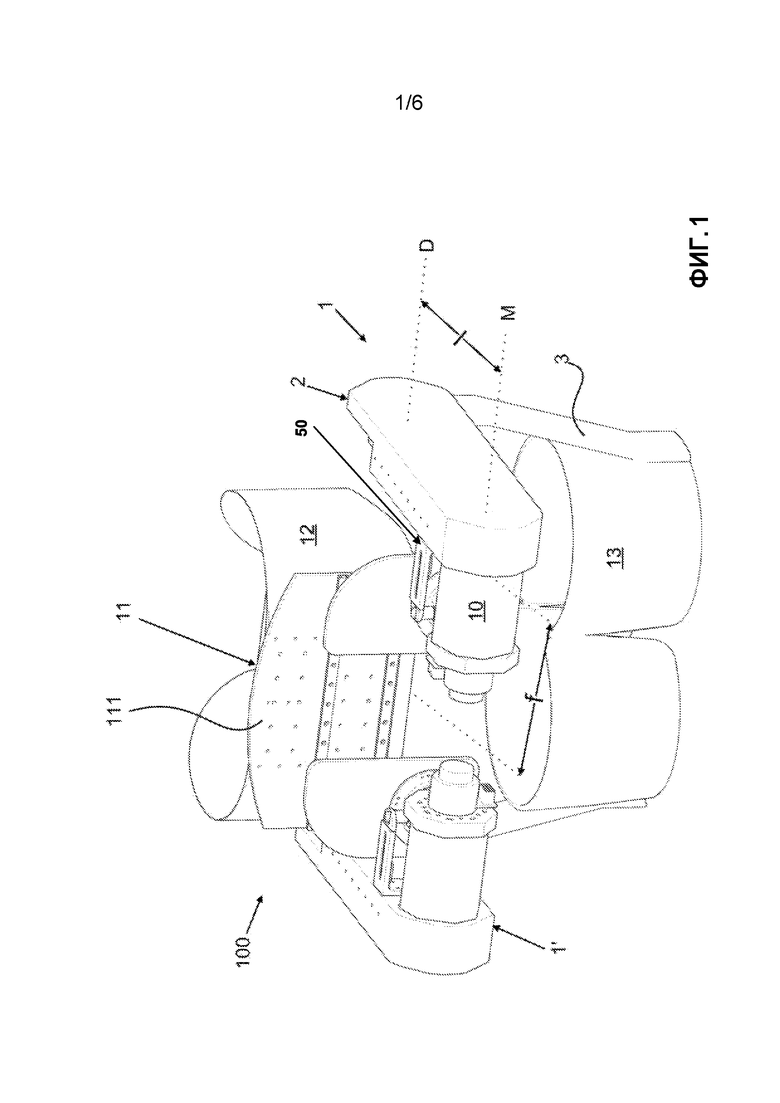
- Фиг.1 иллюстрирует вид сзади в перспективе предпочтительного варианта осуществления системы приведения в действие, в соответствии с настоящим изобретением, и ортеза, содержащего ее;
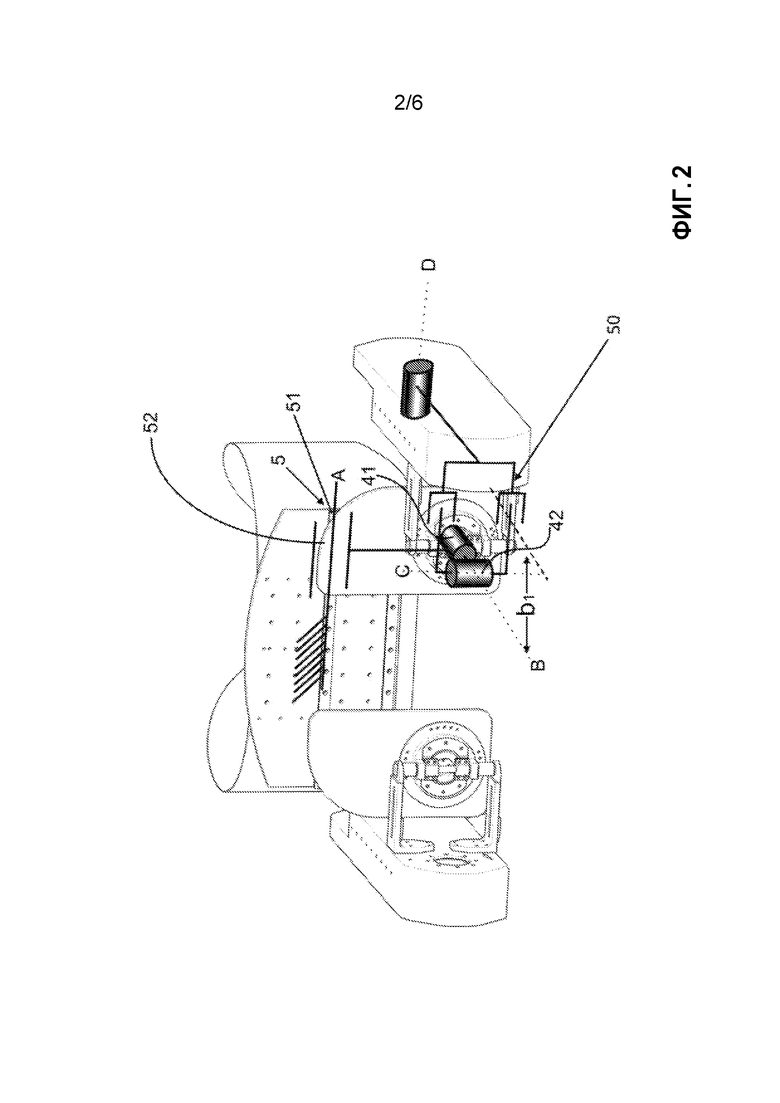
- Фиг.2 иллюстрирует вид сзади в перспективе системы, изображенной на Фиг.1, на котором некоторые компоненты были исключены для более понятной иллюстрации кинематической цепи указанной системы;
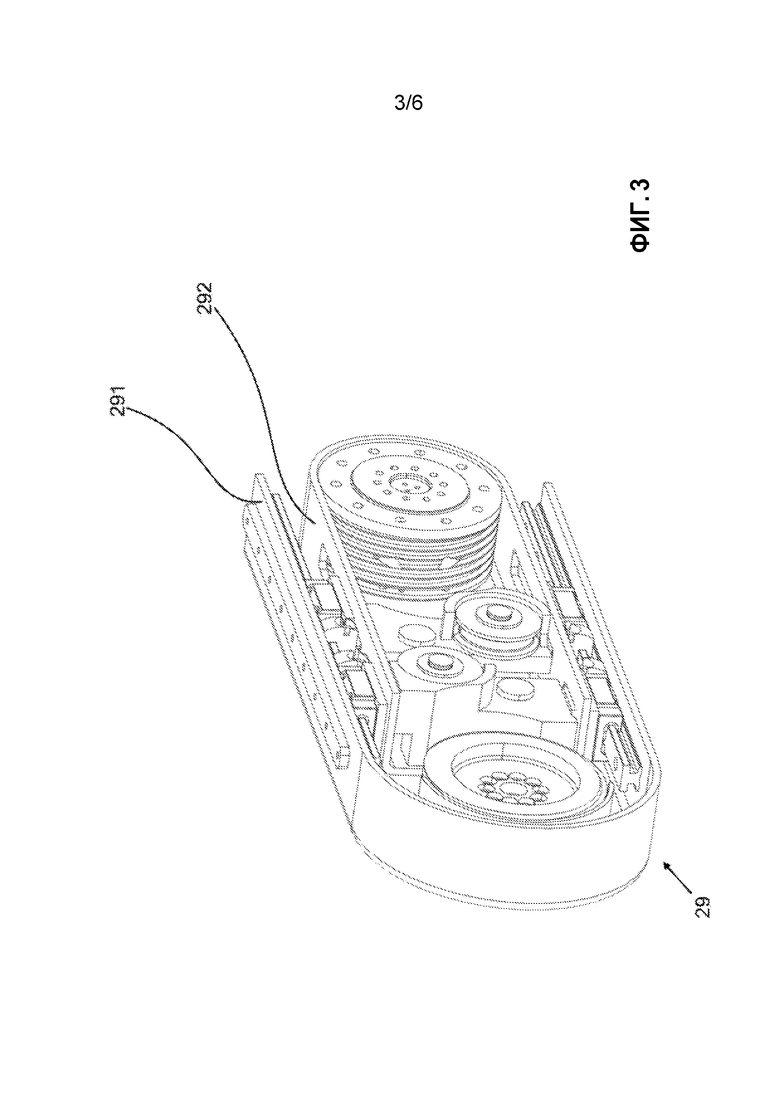
- Фиг.3 иллюстрирует примерный вид сбоку в перспективе преимущественного варианта осуществления устройства трансмиссии системы, изображенной на Фиг.1;
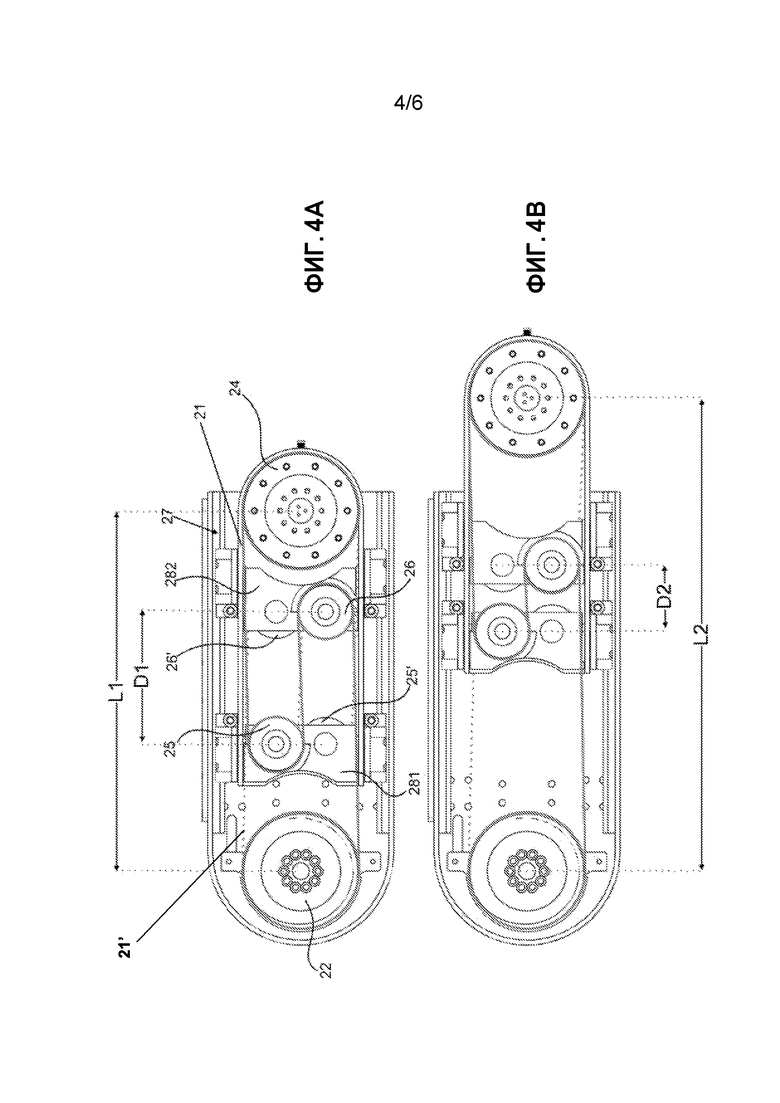
- каждая из Фиг.4А и 4В иллюстрирует вид сбоку устройства, изображенного на Фиг.3, соответственно, в конфигурации минимального и максимального продольного удлинения;
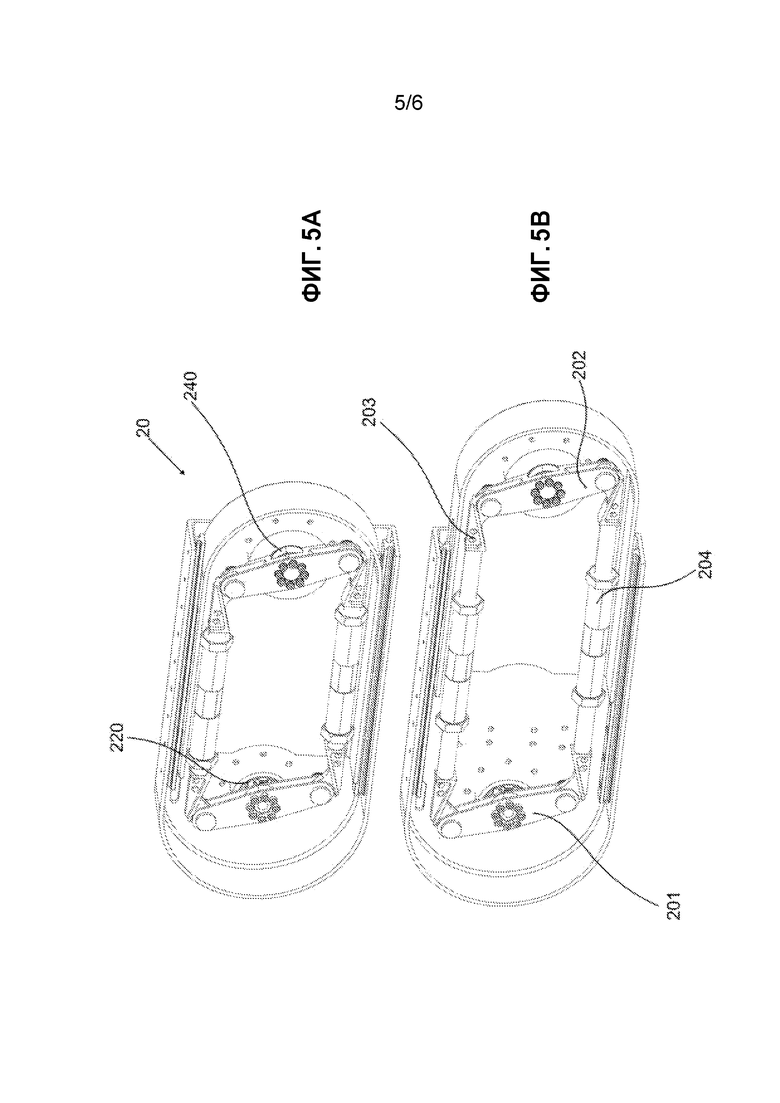
- каждая из Фиг.5А и 5В иллюстрирует примерный вид сбоку в перспективе другого преимущественного варианта осуществления устройства трансмиссии системы, изображенной на Фиг.1, соответственно, в конфигурации минимального и максимального продольного удлинения;
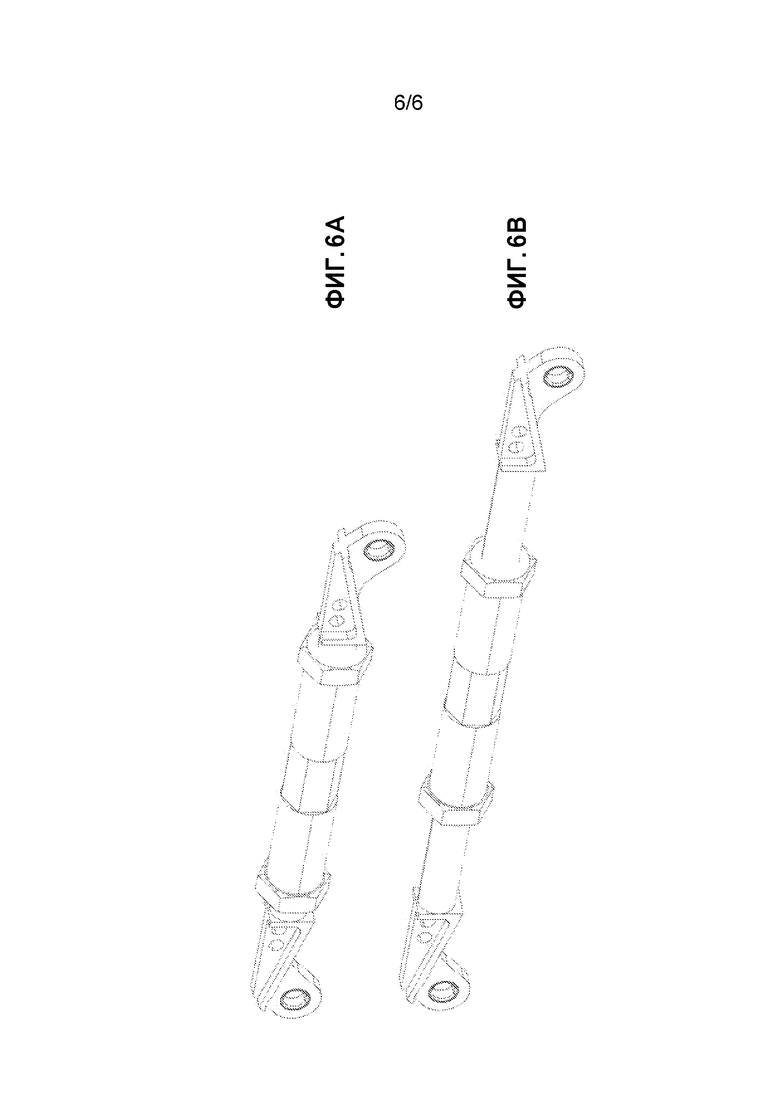
- каждая из Фиг.6А и 6В иллюстрирует примерный вид сбоку в перспективе компонента устройства, изображенного на Фиг.5А, 5В, соответственно, в конфигурации минимального и максимального продольного удлинения
Размеры, углы и кривые, представленные на указанных выше чертежах, следует понимать как примерные и необязательно изображенные с соблюдением пропорций.
Подробное описание предпочтительных вариантов осуществления
В первую очередь, в отношении Фиг.1 и 2, ортез тазобедренного сустава, в соответствии с предпочтительным вариантом осуществления данного изобретения, в общем обозначен номером позиции 100. Указанный ортез 100 является так называемым «Активным Ортезом Таза» (англ. "Active Orthosis Pelvis" (APO)).
Ортез 100 включает в себя две монолатеральные системы приведения в действие, по одной для каждого тазобедренного сустава, обозначенные, соответственно, 1 и 1ʹ и выполненные каждая в соответствии с предпочтительным вариантом осуществления данного изобретения. Поскольку две системы 1 и 1ʹ являются идентичными, помимо необходимых изменений для того, чтобы они подходили для левого и правого сустава, соответственно, здесь и далее будет упоминаться только правое устройство, обозначенное позицией 1.
Система 1 приведения в действие содержит, прежде всего, неподвижную раму 11 для соединения, постоянно или с возможностью отсоединения, со структурой ортеза 100. В настоящем случае, указанная рама 11 включает в себя соединительную планку или фланец 111.
Указанная рама 11 взаимодействует с ортезом 100 и стабилизирует его на теле пользователя, и может быть прикреплена к последнему с помощью соответствующего ортопедического каркаса для таза или туловища, изображенного для примера и обозначенного позицией 12.
Первое линейное сочленение 5, которое будет описано в краткой форме, вращательное сочленение 41 разведения-приведения, вращательное сочленение 42, которое в данном документе будет называться сочленением вращения внутрь и наружу, так как, в сочетании с указанным первым линейным сочленением 5, дает возможность исполнять указанное движение тазобедренного сустава, привод 10, в частности, привод вращения, и устройство 2 трансмиссии соединены, конструктивно последовательно, с указанной неподвижной рамой 11. Каждый из данный компонентов далее будет описываться более подробно.
Вращательные сочленения 41 и 42 выполнены известным способом, например, в виде кинематических пар с вращательной степенью свободы вокруг, соответственно, оси В разведения-приведения и оси С, параллельной оси физиологического вращения внутрь и наружу, при этом указанная ось С является перпендикулярной и инцидентной к оси В.
Как было указано, сочленения 5 (поступательное), 41 и 42 расположены последовательно в кинематической цепи между указанными неподвижной рамой 11 и приводным средством 10. Указанные сочленения 5, 41 и 42 далее выполняют цепь степеней свободы/регулировочную цепь, посредством которой приводное средство 10 и устройство 2 трансмиссии соединяются с рамой 11. Данные степени свободы могут быть пассивными, как в примере, который рассматривается в данном документе, либо активизированными, либо соединенными с эластичными элементами.
Приводное средство 10 вращения может иметь тип, который называется SEA (англ. Series Elastic Actuator, «Последовательный эластичный привод»), широко известный из уровня техники. В соответствии с данным изобретением, приводное средство 10 размещено на заднем участке ортеза 100, который соответствует спине пользователя. Приводное средство 10 выполнено с возможностью обеспечивать вспомогательную пару на оси М его собственного двигателя. Указанная ось М является осью, по существу параллельной оси, вокруг которой происходит движение сгибания-разгибания тазобедренного сустава объекта, другими словами, осью, по существу перпендикулярной сагиттальной плоскости.
Устройство 2 трансмиссии механически соединено с осью М двигателя и выполнено с возможностью передавать указанную вспомогательную пару на выходную ось D, которая воспроизводит физиологическую ось сгибания-разгибания тазобедренного сустава. Оси M и D являются параллельными или по существу параллельными.
В альтернативном варианте осуществления, ось М двигателя также может быть расположена непараллельно выпускной оси D (например, вертикально или по существу вертикально). В данном случае, указанное устройство трансмиссии будет модифицировано соответствующим образом.
Устройство 2 трансмиссии выполнено с возможностью размещаться, во время эксплуатации, с бока пользователя, по существу параллельно сагиттальной плоскости пользователя. Иначе говоря, устройство 2 трансмиссии располагается, главным образом, в перпендикулярном направлении по отношению к осям M и D.
Устройство 2 трансмиссии представляет собой продольное удлинение, то есть поперечное расширение в сагиттальной плоскости, регулируемое. Другими словами, устройство 2 трансмиссии выполнено с возможностью регулирования расстояния, на сагиттальной плоскости тела пользователя, между осью М двигателя и выпускной осью D. Данное расстояние обозначено для примера символом «l» на Фиг.1. Следовательно, указанное устройство 2 трансмиссии способно адаптироваться к расстоянию между спиной объекта и осью вращения тазобедренного сустава.
В настоящем примере, соединительный с возможностью вращения стержень 3, или связующее звено, присоединен, в частности, сцеплен с выпускной осью D. Указанное связующее звено 3 выполнено с возможностью сцепляться с бедром пользователя, по возможности, посредством ортопедического каркаса 13 или аналогичного элемента, способного распределять комфортным образом давление, возникающее вследствие действия приводного средства 10, по значительной поверхности сегмента сустава.
Приложение вспомогательного действия приводным средством 10 осуществляется тогда в виде толкающего усилия, которое связующее звено 3 создает на уровне соответствующего сегмента сустава. Устройство 2, таким образом, воплощает расширяемую передающую систему, которая передает действие приводного средства 10 вращения тазобедренному суставу и делает возможным выравнивание в сагиттальной плоскости оси D вращения связующего звена 3 с осью тазобедренного сустава пользователя.
Исходя из вышеописанного, становится понятно, что полная конфигурация системы 1 такова, что приводное средство 10 и устройство 2 трансмиссии дают в результате "плавающую" конструкцию в отношении рамы 11, и это, главным образом, благодаря взаимному расположению вращательных сочленений 41 и 42. Следовательно, приводное средство 10 вращения может называться «Задним Плавающим Приводом для Тазобедренного сустава» (англ. "Rear Floating Hip Actuator").
Таким образом, можно сказать, что система приведения в действие является неотъемлемой частью бедра пользователя и, благодаря кинематической цепи, посредством которой она фиксируется к раме ортеза, дает возможность исполнения всех движений тазобедренного сустава.
Фиг.1 и 2 и, более подробно, Фиг.3, 4А и 4В иллюстрируют первый предпочтительный вариант осуществления устройства 2 трансмиссии. В данном варианте осуществления, это устройство, основанное на одном или нескольких гибких удлиненных элементах, например, кабелях, цепях, ремнях, которые задействуют множество роликовых блоков или эквивалентных компонентов. В настоящем примере, применена пара кольцеобразных кабелей 21 и 21ʹ. Каждый кабель намотан на два общих основных роликовых блока (один относительно оси М двигателя и обозначен номером позиции 22, и один относительно выпускной оси D и обозначен как 24) и на два неактивных возвратных роликовых блока, соответственно, 25, 25ʹ и 26, 26'. Все шесть рассматриваемых роликовых блоков способны вращаться вокруг осей, параллельных друг другу и по существу перпендикулярных, во время эксплуатации, сагиттальной плоскости тела пользователя.
В изображенном примере, указанное устройство включает в себя:
- основной ведущий роликовый блок 22, соединенный с валом М двигателя, чтобы получать движение;
- основной ведомый роликовый блок 24, с осью, соответствующей выпускной оси D; и
- четыре промежуточных возвратных роликовых блока меньшего размера, 25, 25', 26 и 26'.
Роликовый блок 24 и две пары возвратных роликовых блоков 25-25' и 26-26' имеют возможность скользить в направлении, перпендикулярном их осям, с помощью механизма 27 скольжения, соотнесенного с корпусом 29. Последний может состоять из двух коробчатых элементов 291 и 292, частично вмещенных один в другой и изготовленных, например, из углеродного волокна. Указанные два коробчатых элемента 291 и 292 могут скользить относительно друг друга, тем самым, изменяя расстояние между осью М двигателя и ведомым валом D, соответственно, которые составляют с ними единое целое. В данном конкретном случае, внешний коробчатый элемент 291 имеет две направляющие, по которым перемещаются два носителя, являющиеся неотъемлемой частью внутреннего элемента 292. Основной ведомый роликовый блок 24 и пара возвратных роликовых блоков 25-25' составляют единое целое с коробчатым элементом 292. Основной ведущий роликовый блок 22 неподвижно присоединен к элементу 291.
Указанные две внутренние пары роликовых блоков 25-25' и 26-26' располагаются на двух раздельных элементах, или фланцах, 281 и 282. Элемент 281 составляет единое целое с коробчатым элементом 292, тогда как элемент 282 имеет возможность свободно скользить посредством носителей на направляющих, описанных выше, также независимо в результате скольжения второго коробчатого элемента 292.
Взаимное положение двух указанных элементов 281 и 282 и двух указанных коробчатых элементов 291 и 292 позволяет достигать надлежащего натяжения кабелей 21, которые соединяют роликовые блоки, для любого расстояния между двумя указанными основными роликовыми блоками 22 и 24.
Как представлено в качестве примера на Фиг.4А, устройство выполнено с возможностью принимать первую конфигурацию минимального удлинения, соответствующего максимальному расстоянию D1 между осями возвратных роликовых блоков 25 и 26 (и, соответственно, между осями 25' и 26') и при минимальном расстоянии L1 между осями основных роликовых блоков 22 и 24.
Как представлено в качестве примера на Фиг.4В, устройство выполнено с возможностью принимать вторую конфигурацию максимального удлинения, соответствующего минимальному расстоянию D2 между осями возвратных роликовых блоков 25 и 26 (и, соответственно, между осями 25' и 26') и при максимальном расстоянии L2 между осями основных роликовых блоков 22 и 24.
Устройство 2 обязательно содержит блокировочное средство для фиксации положения роликовых блоков в двух вышеописанных крайних позициях и между ними, в зависимости от антропометрии пользователя и конкретного двигателя и/или требований реабилитации. В примере, рассматриваемом в данном документе, элементы, которые могут быть зафиксированы с помощью винтов на направляющей, блокируют указанные носители в необходимом положении.
Фиг. 5А-6В относятся ко второму варианту осуществления устройства трансмиссии, в данном случае, целиком обозначенного номером позиции 20.
Устройство 20 также включает в себя основной вращательный элемент двигателя, или моторный ролик, 220, соединенный с валом М двигателя, и основной вращательный ведомый элемент, или ролик, 240, соотнесенный с выпускной осью D.
На каждом из данных роликов 220 и 240 установлена соответствующая дуга 201, 202, или планка, соотнесенная с соответствующим роликом на его собственном центральном участке.
Продольные концы каждой дуги присоединены к соответствующему концу первого и второго жесткого стержнеобразного элемента, или стержня, 203 и 204, воплощая по существу конфигурацию шарнирного параллелограмма.
Как лучше всего видно на Фиг. 6А и 6В, каждый стержнеобразный элемент 203, 204 имеет регулируемое продольное удлинение, напоминающее телескопическую или аналогичную конфигурацию, которая является блокируемой во множестве конструкций.
Одно конкретное решение для воплощения каждого из элементов 203, 204 составляет конструкция из трех частей: центральной части, изготовленной из полого ствола, изнутри снабженного резьбой, имеющего наполовину левостороннюю резьбу и наполовину правостороннюю резьбу; и двух конечных участков, которые соединяют поворотное сочленение планки прямоугольника с центральной частью каждого соединительного стержня 203, 204. Указанные два конечных элемента каждого соединительного стержня 203, 204 могут быть идентичны, за исключением резьбы для соединения с центральной частью, одна из которых выполнена в соответствии с правосторонней резьбой и другая - в соответствии с левосторонней резьбой.
В обоих описанных вариантах осуществления, указанное устройство 2, 20 трансмиссии является подходящим для изготовления с уменьшенной толщиной.
Вновь с учетом Фиг.1 и 2, как уже упоминалось в настоящем примере, система 1 также обеспечивает устройство регулирования, или изменения, ширины на фронтальной плоскости тела пользователя, целиком обозначенное позицией 5 и основанное на линейном сочленении. Указанное линейное сочленение выполнено известным способом в виде кинематической пары с одной поступательной степенью свободы вдоль горизонтального направления параллельно фронтальной плоскости тела пользователя.
Линейное сочленение 5 также может воплощать, во время эксплуатации, линейную степень свободы системы 1 приведения в действие и ортеза 100, включающего ее в себя.
Указанное устройство содержит, в настоящем примере, механизм скольжения, образованный одной или несколькими направляющими или рельсами 51, соотнесенными с неподвижной рамой 11, и одной или несколькими элементами скольжения или пластинами 52, соединенными с сочленением 41. Линейное сочленение проходит вдоль фронтальной оси А по существу параллельно осям М и D.
Устройство 5 позволяет регулировать, перед использованием или непрерывно, ширину системы 1 приведения в действие во фронтальной плоскости тела пользователя, представленную приведенным для примера размером f на Фиг.1.
Также имеется дополнительный механизм 50 поперечной регулировки, -который может быть зафиксирован в заранее заданном положении, в частности, с помощью систем фиксации винтами, в соответствии с антропометрией объекта, - пригодный для того, чтобы давать возможность регулировать ширину системы приведения в действие, и расположенный между сочленением 42 и устройством трансмиссии; точнее говоря, данный механизм позволяет регулировать расстояние, всегда во фронтальной плоскости, сочленения 41 разведения-приведения со стороны человека (или аналогично со стороны сагиттальной плоскости), соотнесенное с размером b1 на Фиг.2. Механизм 50, таким образом, является дополнительным линейным сочленением, выполненным с возможностью регулировать горизонтальное расстояние между вращательным сочленением 41 и устройством 2 трансмиссии на фронтальной плоскости тела пользователя. Регулирование расстояния b1 не зависит от регулирования вышеупомянутого расстояния f. Таким образом, достигается выравнивание с физиологической осью вращения.
Наличие устройства 5 регулирования, и, предпочтительно, устройства 50, и возможность регулирования поперечно-сагиттального расширения устройства 2 трансмиссии позволяют сделать ось В разведения-приведения и ось М сгибания-разгибания инцидентными в центре, или в средней точке, головки бедренной кости объекта, использующего данный ортез.
Система 1 может также включать в себя устройство регулирования вертикального положения (высоты) приводного средства 10 и других компонентов системы. Такое устройство также может быть блокируемым в заранее заданном положении, в соответствии с антропометрией объекта, или может обеспечивать, во время эксплуатации, дополнительную линейную степень свободы для данной системы приведения в действие.
Следовательно, становится понятно, что система 1 приведения в действие осуществляет кинематическую цепь между рамой 11 и связующим звеном 3. В частности, вращательное сочленение 41 представляет собой сочленение разведения-приведения тазобедренного сустава человека, в то время как сочетание двух степеней свободы вдоль/вокруг осей А и С, вместе с возможной незначительной степенью неустойчивости, свойственной соединению бедро-связующее звено, дает возможность автономного движения вращения внутрь и наружу на уровне тазобедренного сустава. Вся кинематическая цепь естественным образом заканчивается сочленением сгибания-разгибания тазобедренного сустава вокруг оси D, реализуемым связующим звеном 3.
На данном этапе будет более понятно, что ортез 100 обеспечивает билатеральный экзоскелетный комплекс, который может способствовать сгибанию-разгибанию тазобедренного сустава. Данный комплекс способен обеспечивать высоко-вспомогательные пары и имеет низкую общую массу.
Осуществление системы трансмиссии, описанной на данный момент, обеспечивает одну из ее пространственных конфигураций относительно тела пользователя, в которой продольная ось системы трансмиссии параллельна поперечной плоскости тела человека. В данной конфигурации, ось М привода приведения в действие и ведомая ось D находятся на одной высоте относительно указанной поперечной плоскости.
Наличие группы приведения в действие в положении сзади по отношению к телу человека также предусматривает альтернативный вариант осуществления, в котором привод расположен на другой высоте относительно оси тазобедренного сустава, то есть ведомой оси D. Возможность расположения группы приведения в действие выше указанной оси сустава позволяет, с одной стороны, избежать помех в нижней части спины, из-за которых становится невозможно садиться, с другой стороны, расположить центр тяжести всей структуры выше, с положительными результатами с точки зрения затрат энергии во время ходьбы. В данном альтернативном варианте осуществления, устройство трансмиссии расположено под наклоном, то есть не горизонтально.
Настоящее изобретение было описано в данном документе с учетом предпочтительных вариантов осуществления. Следует учитывать, что могут быть другие варианты осуществления, афферентные к той же изобретательской сущности, как определяется объемом правовой охраны Формулы изобретения, изложенной ниже.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОМОЩИ ОПЕРАТОРУ В ПРИЛОЖЕНИИ УСИЛИЙ | 2018 |
|
RU2747404C1 |
| ТАЗОБЕДРЕННЫЙ УЗЕЛ ЭКЗОСКЕЛЕТА ИЛИ ОРТЕЗА | 2017 |
|
RU2655189C1 |
| ГРУЗОВОЙ ПАССИВНЫЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2725288C2 |
| ГОЛЕННОЕ ЗВЕНО ОРТЕЗА ИЛИ ЭКЗОСКЕЛЕТА | 2016 |
|
RU2635760C1 |
| ТАЗОБЕДРЕННЫЙ СУСТАВ ДЛЯ ПРОТЕЗА НОГИ | 2000 |
|
RU2222291C2 |
| Способ выработки управляющих сигналов и способ ручного управления работой экзоскелетона нижних конечностей на его основе, а также интерфейсы управления работой указанного экзоскелетона в режиме ручного и программного управления, использующие указанный способ выработки | 2016 |
|
RU2638276C1 |
| ГОЛЕНОСТОПНОЕ ЗВЕНО ОРТЕЗА ИЛИ ЭКЗОСКЕЛЕТА | 2017 |
|
RU2687573C2 |
| Пассивный реабилитационный экзоскелет | 2017 |
|
RU2665386C1 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ ИСКУССТВЕННЫМ КОЛЕННЫМ СУСТАВОМ | 2020 |
|
RU2814943C2 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
Группа изобретений относится к медицине. Монолатеральная система приведения в действие тазобедренного сустава, выполненная с возможностью соединения с ортезом, содержит: приводное средство, устройство трансмиссии, неподвижную раму для соединения с ортезом, по меньшей мере одно вращательное сочленение и линейное сочленение. Приводное средство приспособлено обеспечивать вспомогательный крутящий момент на оси двигателя и сконфигурировано для размещения на заднем участке ортеза, соответствующем спине пользователя. Устройство трансмиссии соединено с осью двигателя для передачи крутящего момента на выходную ось, соответствующую оси сгибания-разгибания тазобедренного сустава и параллельную оси двигателя. Устройство трансмиссии имеет регулируемое удлинение, соответствующее, при использовании, поперечному расширению в сагиттальной плоскости пользователя. Устройство трансмиссии выполнено с возможностью регулировки поперечного расстояния в сагиттальной плоскости пользователя, между осью двигателя и выпускной осью. Устройство трансмиссии выполнено с возможностью размещения, при использовании, сбоку от пользователя. На неподвижной раме установлены приводное средство и устройство трансмиссии. Вращательное сочленение соответствует степени свободы разведения-приведения тазобедренного сустава вокруг соответственной оси разведения-приведения. Вращательное сочленение расположено между неподвижной рамой и приводным средством. Линейное сочленение расположено между неподвижной рамой и вращательным сочленением разведения-приведения тазобедренного сустава. Линейное сочленение выполнено с возможностью регулировки горизонтальной ширины системы приведения в действие на фронтальной плоскости тела пользователя. Общая конфигурация такова, что приводное средство и устройство трансмиссии являются плавающими в отношении рамы. Ортез тазобедренного сустава содержит пару систем приведения в действие, установленных на соответствующем тазобедренном суставе. Изобретения обеспечивают совместимость ортеза со степенями свободы, угловыми экстензиями и в целом кинематикой суставов тела пользователя. 2 н. и 10 з.п. ф-лы, 9 ил.
1. Монолатеральная система (1) приведения в действие тазобедренного сустава, выполненная с возможностью соединения с ортезом (100), содержащая:
- приводное средство (10), приспособленное обеспечивать вспомогательный крутящий момент на оси (М) двигателя и сконфигурированное для размещения на заднем участке ортеза, соответствующем спине пользователя;
- устройство (2) трансмиссии, соединенное с осью (М) двигателя для передачи крутящего момента на выходную ось (D), соответствующую оси сгибания-разгибания тазобедренного сустава и параллельную оси (М) двигателя, причем, устройство (2) трансмиссии имеет регулируемое удлинение, соответствующее, при использовании, поперечному расширению в сагиттальной плоскости пользователя, причем, устройство (2) трансмиссии выполнено с возможностью регулировки поперечного расстояния, в сагиттальной плоскости пользователя, между осью (М) двигателя и выпускной осью (D),
причем устройство (2) трансмиссии выполнено с возможностью размещения, при использовании, сбоку от пользователя;
- неподвижную раму (11) для соединения с ортезом, на которой установлены приводное средство (10) и устройство (2) трансмиссии;
- по меньшей мере одно вращательное сочленение (41), соответствующее степени свободы разведения-приведения тазобедренного сустава вокруг соответственной оси (В) разведения-приведения, причем, вращательное сочленение (41) расположено между неподвижной рамой (11) и приводным средством (10);
- линейное сочленение (5), расположенное между неподвижной рамой (11) и вращательным сочленением (41) разведения-приведения тазобедренного сустава, причем, линейное сочленение (5) выполнено с возможностью регулировки горизонтальной ширины системы (1) приведения в действие на фронтальной плоскости тела пользователя,
причем, общая конфигурация такова, что приводное средство (10) и устройство (2) трансмиссии являются плавающими в отношении рамы (11).
2. Система (1) по п.1, в которой приводное средство (10) включает в себя вращающийся исполнительный механизм, предпочтительно, эластичный вращающийся исполнительный механизм.
3. Система (1) по п.1, в которой устройство (2) трансмиссии выполнено с возможностью располагаться, при использовании, по существу параллельно сагиттальной плоскости пользователя.
4. Система (1) по п.1, в которой устройство (2) трансмиссии имеет тип с гибкими кабелями и содержит роликовые блоки (22, 24, 25, 25', 26, 26'), зацепленные указанными кабелями (21, 21') и имеющими регулируемое расстояние между ними.
5. Система (1) по п.1, в которой устройство (20) трансмиссии содержит удлиненные жесткие элементы (201-204), прикрепленные с возможностью вращения соответствующими продольными концами, предпочтительно, с образованием конфигурации шарнирного параллелограмма, причем по меньшей мере пара указанных удлиненных элементов (203, 204) имеет регулируемое продольное удлинение.
6. Система (1) по любому из пп.1-5, содержащая вращательное связующее звено (3), соединенное или соединяемое с указанным устройством (2) трансмиссии на указанной выпускной оси (D) и выполненное с возможностью зацепления с бедром пользователя.
7. Система (1) по любому из пп.1-5, содержащая вращательное сочленение (42) вращения внутрь и наружу, расположенное в кинематической цепи с указанным вращательным сочленением (41) разведения-приведения тазобедренного сустава между указанной неподвижной рамой (11) и указанным приводным средством (10).
8. Система (1) по любому из пп.1-5, в которой указанное линейное сочленение (5) воплощает, при использовании, горизонтальную степень свободы.
9. Система (1) по любому из пп.1-5, в которой указанное линейное сочленение (5) содержит неподвижный элемент (51), связанный с указанной неподвижной рамой (11), и подвижный элемент (52), способный скользить относительно указанного неподвижного элемента, в соответствии с фронтальным направлением (А), с возможностью формирования поступательного сочленения.
10. Система (1) по любому из пп.1-5, содержащая дополнительное линейное сочленение (50), выполненное с возможностью регулирования горизонтального расстояния между указанным вращательным сочленением (41) и указанным устройством (2) трансмиссии на фронтальной плоскости пользователя.
11. Система (1) по любому из пп.1-5, содержащая средство для регулирования вертикального положения указанного приводного средства (10).
12. Ортез (100) тазобедренного сустава, содержащий по меньшей мере, одну систему (1) приведения в действие по любому из предыдущих пунктов, пару систем (1, 1') приведения в действие, каждая по любому из предыдущих пунктов, установленных на соответствующем тазобедренном суставе.
| FR 2981266 B1, 18.10.2013 | |||
| Водонагреватель | 1948 |
|
SU79780A1 |
| CN 101234043 A, 06.08.2008 | |||
| WO 2010025409 A1, 04.03.2010 | |||
| JP 2014155998 A, 28.08.2014 | |||
| EP 1889593 A1, 20.02.2008. | |||

