Группа изобретений относится к области медицины и может быть использована в экзоскелетонах (экзоскелетах) нижних конечностей с пневматическим, гидравлическим или электрическим приводом для обеспечения ходьбы пользователей с полностью или частично парализованными нижними конечностями, а также для реабилитации пациентов при восстановлении навыков ходьбы после травм и заболеваний различной тяжести.
Экзоскелетон нижних конечностей, рассматриваемый в настоящем описании группы изобретений, включает в свой состав исполнительный механизм движения экзоскелетона, состоящий из ортезов тазобедренного и/или коленного, и/или голеностопного суставов нижних конечностей (в количестве, зависимом от конкретной дисфункции нижних конечностей пользователя экзоскелетона) и интерфейс управления работой приводов указанных ортезов, в связи с чем эксплуатационная эффективность такого экзоскелетона зависит от удобства управления приводами указанных ортезов при условии максимального приближения двигательных возможностей экзоскелетона к физиологии пользователя.
Максимальное приближение двигательных возможностей экзоскелетона нижних конечностей к физиологии пользователя достигается в результате реализации интерфейса управления приводами ортезов суставов в составе экзоскелетона на основе сигналов мышечной и нейронной активности пользователя (см., например, заявку US 2015289995, A61F 2/60, 2015), который, вместе с тем, из-за низкой стабильности связи «нервная система человека ->машинные возможности управления» и, соответственно, недостаточно высокой надежности, а также сложности и высокой стоимости характеризуется ограниченностью применения. Пользователи с парализованными нижними конечностями не могут воспользоваться подобным интерфейсом ввиду невозможности организации связи «нервная система человека → машинные возможности управления», что не согласуется с социально-потребительским запросом и соответствующий интерфейс выходит за рамки настоящего описания предлагаемой группы изобретений.
Уровень техники в области управления работой экзоскелетона нижних конечностей характеризуется в основном аналогами - интерфейсами управления с программным управлением приводами ортезов суставов экзоскелетона на основе обратной связи с датчиками состояния нижних конечностей экзоскелетона (см., например, патент CN 101803966, A61F 2/62, 2010 или заявку US 2015025423, А61Н 3/00, 2015).
Недостатками перечисленных аналогов являются возможность выполнения только движений с предварительно заданными параметрами, пользователь может только выбрать, какое движение должен выполнить экзоскелетон, например, сделать шаг левой или правой ногой, но оперативно изменить параметры движения, например, длину шага, высоту подъема стопы или скорость движения системы-аналоги возможность не обеспечивают (см., например, заявку US 2013158445, А61Н 3/00, 2013).
При этом наиболее проблемной в осуществлении остается возможность оперативной (во время ходьбы) регулировки каждого следующего шага, в частности, возможность на ходу менять высоту подъема стопы (см. информационный материал Ярослава Рыбакова «Импортозамещение экзоскелетов» от 04.04.2015 г. на сайте в Интернет: http://rusplt.ru/societv/importozameschenie-ekzoskeletov-16235.html?auth_code=anonymous) или длину шага.
Этот недостаток присутствует и в известном силовом управлении, при котором пользователь за счет своих мышечных усилий (в частности ног), прикладываемых к элементам (датчикам силы) приводов экзоскелетона, осуществляет их перемещение, причем чем больше прикладываемая пользователем сила, тем выше скорость движения управляемых механических компонентов указанного исполнительного механизма и тем выше усилия, создаваемые этими компонентами (см. обзорную статью Верейкина А.А. «К вопросу применения экзоскелетов в промышленной и строительной сфере - история разработок, виды, классификация» на сайте в Интернет: http://www.str-t.ru/reports/18/).
Данный недостаток заключается в несовершенстве контроля движения экзоскелетона, связанном с калибровкой датчиков усилия, в соответствии с которой управляющий сигнал, формируемый указанными датчиками, пропорционален угловым скоростям поворота (вращения) валов ортезов суставов. При такой калибровке любой из факторов, мешающих свободному движению ортеза сустава ноги (например, сумка, одежда, трава, камни и т.п.), может привести к автоматическому увеличению момента силы, развиваемого на валу ортеза сустава из-за компенсации потери скорости вращения вала ортеза сустава от внешних факторов, в результате чего возможны:
а) неконтролируемый рост развиваемого на валу ортеза сустава момента силы, что может привести к повреждению ортеза сустава экзоскелетона;
б) резкое возрастание скорости вращения вала ортеза сустава после внезапного прекращения действия мешающего движению фактора, что существенно усложнит управление движением экзоскелетона, особенно для пользователя экзоскелетона с дисфункциями нижних конечностей и может привести к повреждению ортеза сустава экзоскелетона.
В общем случае, настройка датчиков усилия на формирование сигналов, пропорциональных крутящему моменту силы на валах приводов поворотных звеньев экзоскелетона (как решение задачи текущей (во время ходьбы) регулировки каждого следующего шага экзоскелетона), оказывается выигрышной - более эргономичной в связи с исключением при этом излишних увеличений амплитуды движений нижних конечностей экзоскелетона, свойственных настройке датчиков силы на угловую скорость или угол поворота на валах приводов поворотных звеньев экзоскелетона в условиях преодоления препятствий местности, мешающих развитию шага экзоскелетона.
Выигрыш управления работой экзоскелетона при этом в экономии амплитуд движений его нижних конечностей, присущей физиологии пользователя экзоскелетона при смене (перестройке) шага экзоскелетона.
В качестве прототипа заявляемого способа выработки сигналов, управляющих работой экзоскелетона нижних конечностей, выбран способ выработки сигналов, управляющих работой экзоскелета нижних конечностей и задающих необходимый для ходьбы диапазон углов поворота валов ортезов суставов ног в составе указанного экзоскелета, путем генерации указанных сигналов за счет усилий пользователя экзоскелета с помощью средства выработки указанных сигналов, при котором пользователь экзоскелета с помощью мускулов своих ног совершает малые перемещения внутри экзоскелета -«микроперемещения» и нажимает на датчики усилий, жестко укрепленные на том или ином звене экзоскелета, сигнализируя тем самым о желаемом направлении перемещения этого звена и желаемой скорости такого перемещения, причем скорость перемещения звена тем больше, чем сильнее пользователь экзоскелета давит на датчик усилий (см. сообщение Аведикова Г.Е. и др. «Экзоскелет: конструкция, управление» - Материалы XI 1-го Всероссийского совещания по проблемам управления. М., 2014, с. 88-89, рис. 5 на сайте в Интернет: http://vspu2014.ipu.ru/proceedings/prcdnqs/84.pdf).
Недостатками указанного прототипа являются недостаточно усовершенствованное управление экзоскелетом нижних конечностей в связи с низкой эргономичностью способа выработки сигналов, управляющих работой экзоскелета, обусловленной настройкой датчиков усилий, вырабатывающих указанные сигналы, на скоростные характеристики движений нижних конечностей экзоскелета (см. изложенный недостаток выше) и исключение из списка возможных потребителей экзоскелета пользователей с парализованными ногами.
В качестве прототипов заявляемых способа ручного управления работой экзоскелетона нижних конечностей и интерфейса управления работой экзоскелетона нижних конечностей в режиме ручного управления выбраны аналогичные способ управления путем выработки сигналов, задающих необходимый для ходьбы диапазон углов поворота валов ортезов суставов ног в составе указанного экзоскелетона, с помощью пальцев руки пользователя экзоскелетона, и интерфейс, содержащий блок выработки с помощью пальцев руки пользователя экзоскелетона сигналов ручного управления, задающих необходимый для ходьбы диапазон углов поворота валов ортезов суставов ног в составе указанного экзоскелетона и направляемых в приводы валов указанных ортезов по патенту US 5662693, A61F 5/01, A61F 5/00, 1997.
При этом в данных прототипах осуществлен усложненный метод углового считывания с помощью специального приемного контроллерного устройства (в составе приводов ортезов суставов ног) сгиба пальцев руки пользователя экзоскелетона, управляющего с помощью закрепленных на пальцах специальных датчиков, вырабатывающих излучаемые электромагнитные импульсы, и приведения с помощью указанного устройства в движение ортезов суставов ног в соответствии с указанными сгибами пальцев без пропорциональности между изменением углов сгиба пальцев и изменением моментов сил, развиваемых на валах ортезов, и, соответственно без выигрыша в эргономичности управления работой экзоскелетона.
В качестве прототипа заявляемого интерфейса управления работой экзоскелетона нижних конечностей в режиме программного управления выбран аналогичный интерфейс по патенту US 7153242, А63В 21/00, 2006.
Этот прототип, содержащий как минимум один датчик углов поворота вала как минимум одного ортеза сустава ноги в составе экзоскелетона, процессорный блок для выработки сигналов, задающих программно ограниченный диапазон углов поворота вала указанного ортеза, на основе считывания сигналов, поступающих от указанного датчика, снабженный автономным средством запуска (в виде клавиатуры) базовых программных вариантов поворота вала указанного ортеза в рамках основных видов движений экзоскелетона, включающих ходьбу, и изменения угла указанного поворота в режиме программного управления и соединенный как минимум с одним приводом указанного ортеза, характеризуется громоздкостью исполнения и функциональной ограниченностью корректировки движения экзоскелетона во время ходьбы, вытекающей из недостатков данного интерфейса, осуществляющего только программное управление на основе предопределенных ранее шаблонов движений экзоскелета, содержащих временные зависимости углов сгибания ортеза сустава в процессе реализации выбранного пользователем движения.
Технический результат предлагаемой группы изобретений - усовершенствование способа выработки сигналов, управляющих работой экзоскелетона нижних конечностей, обеспечивающее повышение эксплуатационных характеристик указанного экзоскелетона в результате использования упомянутого способа выработки сигналов на более высоком эргономичном уровне управления работой экзоскелетона нижних конечностей путем выработки сигналов, задающих необходимый для ходьбы диапазон углов поворота валов ортезов суставов ног в составе указанного экзоскелетона, с помощью пальцев руки пользователя экзоскелетона, получившего осуществление в предлагаемом интерфейсе управления работой экзоскелетона нижних конечностей в режиме ручного управления в условиях качественно улучшенных возможностей преодоления порогов, бордюров и других неровностей опорной поверхности, а также путем корректировки работы экзоскелетона нижних конечностей во время ходьбы в усложненных условиях (при преодолении препятствий местности) при функционировании предлагаемого интерфейса управления работой экзоскелетона нижних конечностей в режиме программного управления с дополнительным блоком выработки с помощью пальцев руки пользователя экзоскелетона сигналов, задающих поворот валов ортезов суставов ног, за счет эффективно приближенного к физиологии пользователя экзоскелетона режима изменения амплитуд вырабатываемых пользователем сигналов, пропорционального изменению моментов сил, развиваемых на валах ортезов суставов ног пользователя.
Для достижения указанного технического результата
в способе выработки сигналов, управляющих работой экзоскелетона нижних конечностей и задающих необходимый для ходьбы диапазон углов поворота вала как минимум одного ортеза сустава ноги в составе указанного экзоскелетона, путем генерации указанных сигналов за счет усилий пользователя экзоскелетона с помощью средства выработки указанных сигналов, упомянутые сигналы вырабатывают в соответствии с условием изменения их амплитуды пропорционально изменению момента силы, развиваемого на валу указанного ортеза;
в способе ручного управления работой экзоскелетона нижних конечностей путем выработки сигналов, задающих необходимый для ходьбы диапазон углов поворота вала как минимум одного ортеза сустава ноги в составе указанного экзоскелетона, с помощью как минимум одного пальца руки пользователя экзоскелетона, амплитуду упомянутых сигналов изменяют пропорционально изменению момента силы, развиваемого на валу указанного ортеза, путем изменения усилия, поочередно оказываемого как минимум на два датчика измерения усилий с помощью двух фаланг пальца руки пользователя экзоскелетона для поворота вала указанного ортеза в двух взаимопротивоположных направлениях;
в интерфейсе управления работой экзоскелетона нижних конечностей в режиме ручного управления, содержащем блок выработки с помощью пальцев руки пользователя экзоскелетона сигналов ручного управления, задающих необходимый для ходьбы диапазон углов поворота вала как минимум одного ортеза сустава ноги в составе указанного экзоскелетона и направляемых как минимум в один привод вала указанного ортеза, блок выработки с помощью пальцев руки пользователя экзоскелетона сигналов ручного управления выполнен на основе как минимум двух датчиков измерения усилий, поочередно оказываемых на указанные датчики при ходьбе для выработки ими упомянутых сигналов двумя фалангами пальца руки пользователя с возможностью поворота вала указанного ортеза в двух взаимопротивоположных направлениях, причем указанные датчики измерения усилий откалиброваны с возможностью формирования сигналов ручного управления с амплитудами, пропорциональными моментам сил, развиваемых на валу указанного ортеза, и обеспечиваемыми пропорциональным изменением усилий, оказываемых на эти датчики указанными фалангами пальца руки пользователя,
при этом
как минимум два датчика измерения усилий могут быть
установлены с их фиксацией к ладони пользователя экзоскелетона и возможностью их рабочего контакта с двумя фалангами пальцев, подключены к усилителю сигналов ручного управления, задающих угол поворота вала как минимум одного ортеза сустава ноги в двух взаимопротивоположных направлениях, закрепленному на запястье одной из рук пользователя экзоскелетона, образующему с этими датчиками указанный выше блок выработки с помощью пальцев руки пользователя экзоскелетона сигналов ручного управления и подсоединенному как минимум к одному контроллеру привода вала указанного ортеза для исполнения поворота указанного вала в диапазоне углов, задаваемых указанным блоком выработки,
выполнены в виде плоских тензочувствительных элементов,
размещены с их закреплением на двух фалангах пальцев руки пользователя экзоскелетона или их встройкой в конструкцию специальной перчатки,
а в состав интерфейса могут быть включены как минимум один датчик углов поворота вала как минимум одного ортеза сустава ноги в составе экзоскелетона и средство доставки пользователю экзоскелетона информирующих сигналов, поступающих от этого датчика, выполненное в виде блока индикации, соединенного с указанным датчиком углов поворота вала и размещенного в поле зрения пользователя экзоскелетона с прикреплением блока индикации к его голове;
в интерфейс управления работой экзоскелетона нижних конечностей в режиме программного управления, содержащий как минимум один датчик углов поворота вала как минимум одного ортеза сустава ноги в составе экзоскелетона, процессорный блок для выработки сигналов, задающих программно ограниченный диапазон углов поворота вала указанного ортеза, на основе считывания сигналов, поступающих от указанного датчика, снабженный автономным средством выбора базовых программных вариантов поворота вала указанного ортеза в рамках основных видов движений экзоскелетона, включающих ходьбу, и изменения угла указанного поворота в режиме программного управления и соединенный как минимум с одним приводом вала указанного ортеза, введен дополнительный блок выработки с помощью пальцев руки пользователя экзоскелетона сигналов ручного управления, задающих необходимый для ходьбы в усложненных условиях диапазон углов поворота вала указанного ортеза, соединенный с процессорным блоком с возможностью отключения программного режима управления работой экзоскелетона и включения ручного режима управления работой экзоскелетона, и выполненный на основе как минимум двух датчиков измерения усилия, поочередно оказываемого на указанные датчики при ходьбе для выработки ими упомянутых сигналов двумя фалангами пальца руки пользователя с возможностью поворота вала указанного ортеза в двух взаимопротивоположных направлениях, причем указанные датчики измерения усилия откалиброваны с возможностью формирования сигналов ручного управления с амплитудами, пропорциональными моментам сил, развиваемых на валу указанного ортеза, и обеспечиваемыми пропорциональным изменением усилий, оказываемых на эти датчики указанными фалангами пальца руки пользователя,
при этом
как минимум два датчика измерения усилий могут быть
установлены с их фиксацией к ладони пользователя экзоскелетона и возможностью рабочего контакта с двумя фалангами пальца и подключены к усилителю сигналов ручного управления, задающих поворот вала как минимум одного ортеза сустава ноги в двух взаимопротивоположных направлениях, закрепленному на запястье одной из рук пользователя экзоскелетона, образующему с этими датчиками блок выработки с помощью пальцев руки пользователя экзоскелетона сигналов ручного управления и подсоединенному к процессорному блоку с возможностью присоединения через него как минимум к одному контроллеру привода вала как минимум одного ортеза сустава ноги для исполнения поворота указанного вала в диапазоне углов, задаваемых указанным блоком выработки,
выполнены в виде плоских тензочувствительных элементов,
размещены с их закреплением на двух фалангах пальца руки пользователя экзоскелетона или встройкой указанных датчиков в конструкцию специальной перчатки,
автономное средство запуска базовых программных вариантов поворота вала как минимум одного ортеза сустава ноги, в составе экзоскелетона в рамках основных видов движений экзоскелетона, включающих ходьбу, и изменения угла указанного поворота в режиме программного управления может быть выполнено в виде многофункциональной кнопки с нефиксируемым состоянием с возможностью переключения этой кнопкой вида программного движения экзоскелетона и отключения с помощью нее программного режима управления работой экзоскелетона с включением ручного режима управления работой экзоскелетона, причем указанная кнопка может быть установлена с ее фиксацией на ладони пользователя экзоскелетона и возможностью ее рабочего контакта с одной из фаланг пальцев,
в состав интерфейса могут быть включены датчик отклонения торса пользователя экзоскелетона от вертикали в сагиттальной и фронтальной плоскостях как минимум один датчик давления на стопу экзоскелетона со стороны опорной поверхности как минимум один датчик угловой скорости поворота вала как минимум одного ортеза сустава ноги в составе экзоскелетона, причем все перечисленные датчики подключены в следящем режиме к указанному выше процессорному блоку, а также средство доставки пользователю экзоскелетона информирующих сигналов, поступающих как минимум от одного датчика углов поворота вала как минимум одного ортеза сустава ноги и как минимум от одного датчика давления на стопу экзоскелетона,
причем средство доставки пользователю экзоскелетона информирующих сигналов, поступающих как минимум от одного датчика углов поворота вала как минимум одного ортеза сустава ноги и как минимум от одного датчика давления на стопу экзоскелетона, может быть выполнено в виде блока индикации, соединенного с указанным выше процессорным блоком и размещенного в поле зрения пользователя экзоскелетона с прикреплением блока индикации к его голове.
Использование датчиков силы для выработки ими сигналов управления при нажатии на них пальцами пользователя экзоскелетона в экзоскелетоне нижних конечностей по заявке WO 2015168788, A61F 2/50, A61F 2/60, A61F 2/68, A61F 2/70, 2015 и в интерфейсе управления работой экзоскелетона нижних конечностей по патенту US 9158376, G05B 15/02, G06F 3/01, A61F 4/00, B25J 9/00, А61Н 1/00, 2015 не противоречит требованиям изобретательского уровня заявляемой группы изобретений, т.к. в первом случае с помощью изменения усилия нажатия на датчики силы пользователь экзоскелетона регулирует коэффициент обратной связи в усложненной несбалансированной динамичной системе экзоскелетона между управляющими приводами верхних поворотных звеньев (для рук пользователя) и ведомыми приводами нижних ортезов суставов ног в условиях низкоэргономичных, а во втором случае с помощью нажатия на датчики силы пользователь экзоскелетона регулирует скоростной параметр движения нижних конечностей экзоскелетона во время ходьбы при программном управлении его работой в порядке текущего выбора пользователем экзоскелетона заранее определенной скорости без выработки пользователем экзоскелетона сигналов, управляющих работой экзоскелетона нижних конечностей, в режиме их изменения, пропорционального изменению крутящего момента силы на валах ортезов суставов ног.
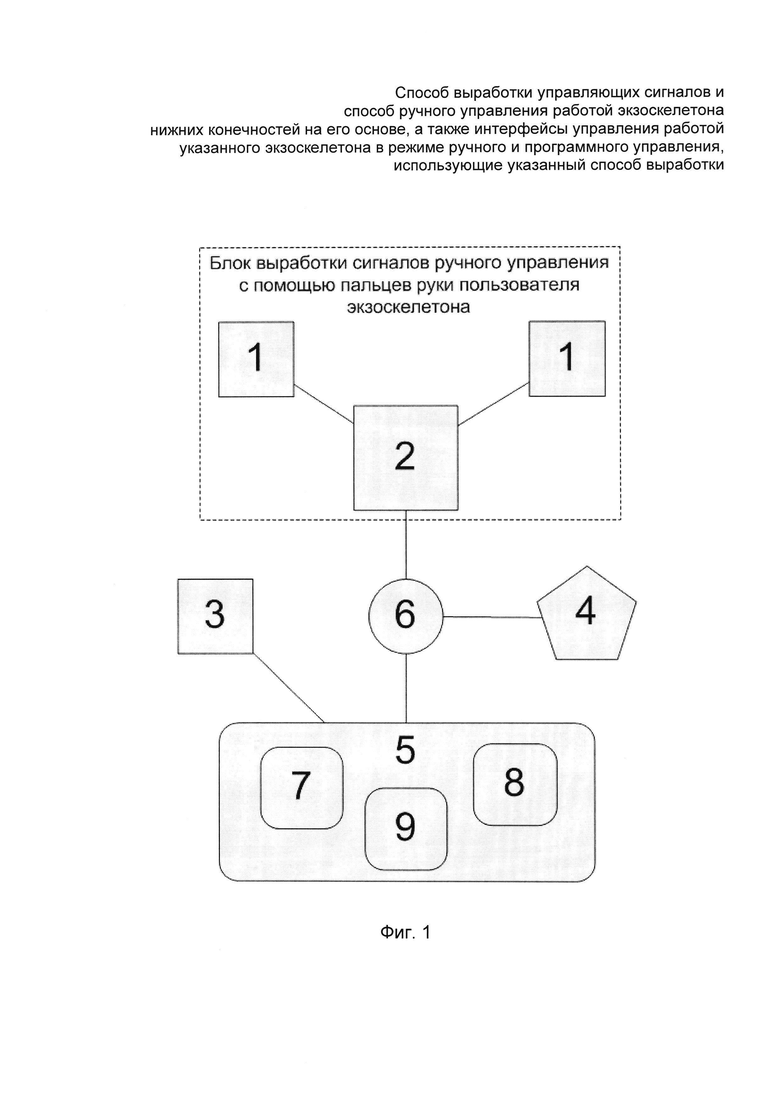
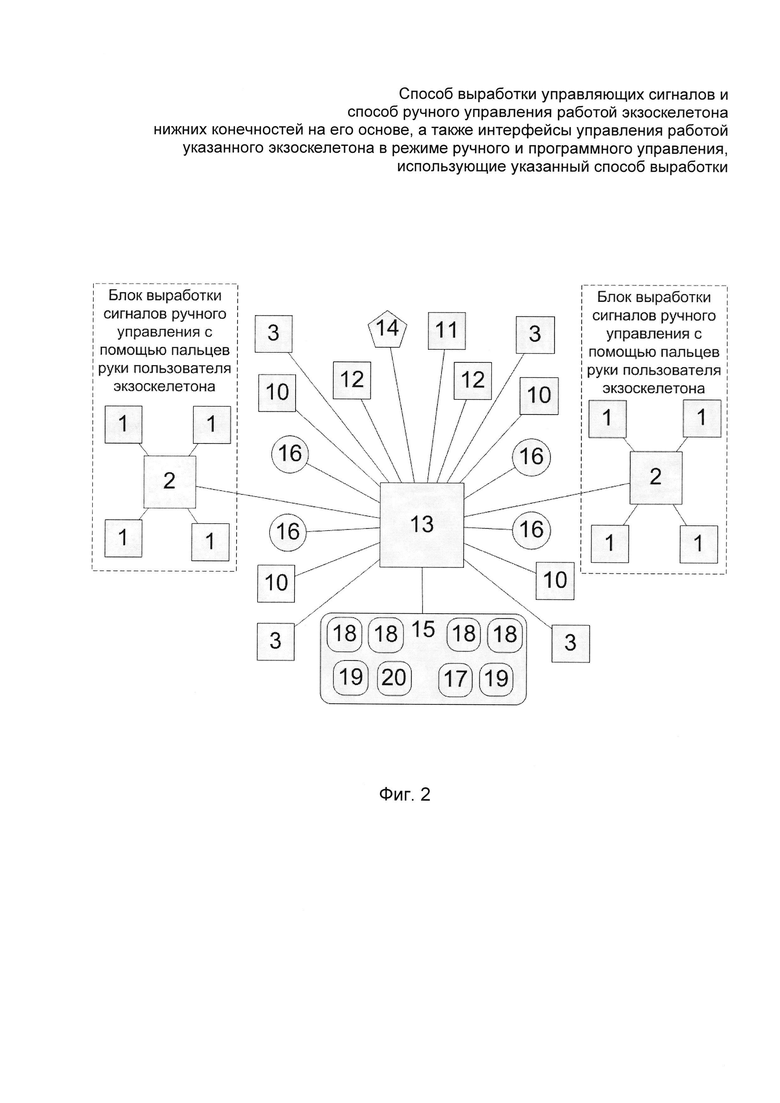
На фиг. 1 и 2 представлены схемы предлагаемого интерфейса управления работой экзоскелетона нижних конечностей, соответственно на основе одного ортеза тазобедренного, коленного или голеностопного сустава в режиме ручного управления и на основе двух ортезов (например, тазобедренного и коленного) суставов правой ноги пользователя экзоскелетона и двух ортезов таких же суставов левой ноги пользователя экзоскелетона в режиме программного управления;
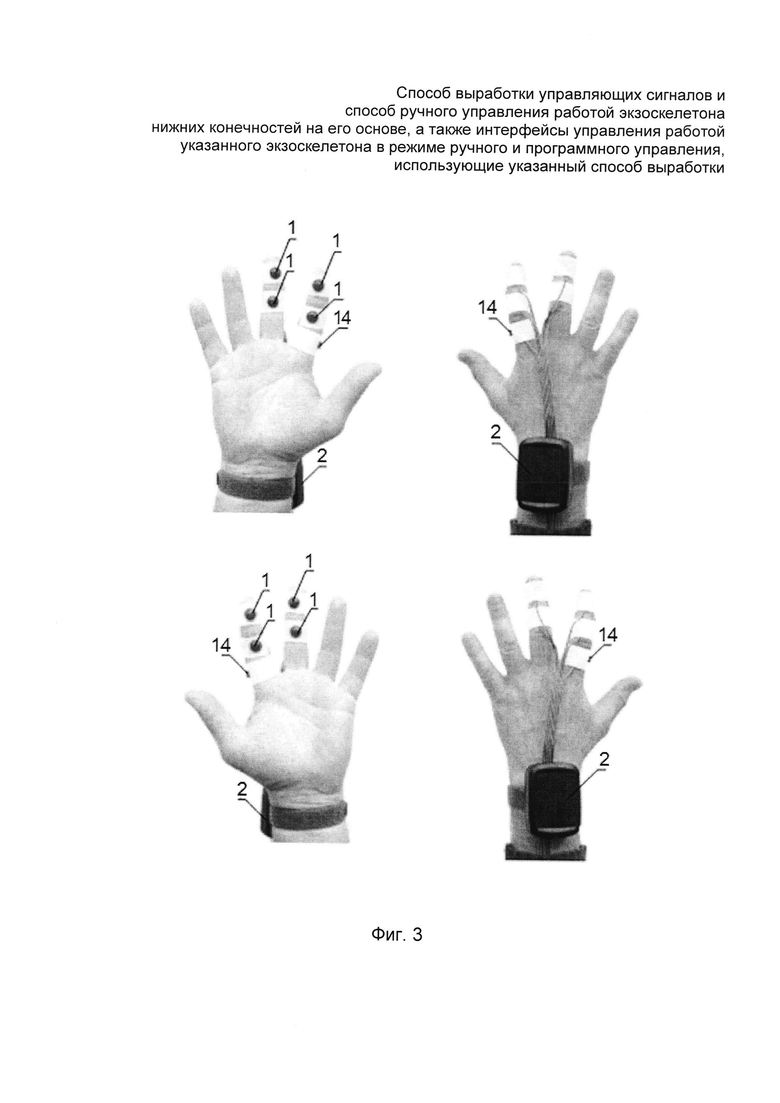
на фиг. 3 показаны
закрепленные на двух фалангах двух пальцев (указательного и среднего) правой руки пользователя экзоскелетона и на двух фалангах таких же пальцев левой руки пользователя экзоскелетона восемь датчиков измерения усилий (по одному на фалангу), поочередно оказываемых на указанные датчики при ходьбе для выработки ими сигналов ручного управления двумя фалангами каждого из указанных пальцев рук,
закрепленные на запястьях правой и левой рук пользователя экзоскелетона два усилителя сигналов ручного управления, входящие в состав блока выработки с помощью пальцев рук пользователя экзоскелетона сигналов ручного управления, задающих необходимый для ходьбы в усложненных условиях диапазон углов поворота валов правой и левой пар указанных на фиг. 2 ортезов,
закрепленные на нижних частях указательных пальцев правой и левой рук пользователя экзоскелетона две (для нажатия на соответствующую кнопку большим пальцем правой или левой руки пользователя - правши или левши) многофункциональные кнопки с нефиксируемым состоянием (по одной на пальце) для автономной работы каждой в режиме переключения вида программного движения экзоскелетона и отключения программного режима управления работой экзоскелетона с включением ручного режима управления работой экзоскелетона в процессе функционирования интерфейса на фиг. 2;
на фиг. 4 показаны интерфейсные элементы на фиг. 3, закрепленные на правой руке пользователя экзоскелетона, при использовании костыля подлокотного;
на фиг. 5 и 6 представлены, соответственно, передний вид в аксонометрии входящего в состав интерфейса управления работой экзоскелетона нижних конечностей в режиме программного управления отдельного блока индикации для доставки пользователю экзоскелетона информирующих сигналов, поступающих через процессорный блок от четырех датчиков углов поворота валов ортезов на фиг. 3 и 4 и двух датчиков давления на правую и левую стопы экзоскелетона (по одному на стопу), и два вида (в разворотах головы на фиг. 6а и 6б) размещенного в поле зрения пользователя экзоскелетона этого же блока индикации, прикрепленного к голове пользователя.
Для раскрытия реализации заявляемых способа выработки сигналов, управляющих работой экзоскелетона нижних конечностей, и использующего его в качестве основы способа ручного управления работой экзоскелетона нижних конечностей предлагается следующий пример выполнения интерфейса управления работой экзоскелетона нижних конечностей (в составе одного ортеза, например, коленного сустава правой ноги пользователя экзоскелетона) в режиме ручного управления (см. фиг. 1), содержащего блок выработки сигналов ручного управления с помощью пальцев руки пользователя экзоскелетона, образованный двумя датчиками 1 измерения усилий и усилителем 2 сигналов ручного управления, датчик 3 углов поворота вала ортеза в составе экзоскелетона, кнопку 4 включения интерфейса и блок 5 индикации движения экзоскелетона в режиме ручного управления его работой.
Оба датчика 1 измерения усилий выполнены в виде плоских тензочувствительных элементов, размещены с их закреплением на двух фалангах, соседних со стороны конца, например, указательного пальца правой руки пользователя экзоскелетона (как показано на фиг. 3, иллюстрирующей пример выполнения интерфейса управления работой экзоскелетона нижних конечностей в режиме программного управления) и через усилитель 2 сигналов ручного управления, закрепленный на запястье правой руки пользователя экзоскелетона (как показано на фиг. 3), подключены к контроллеру 6 привода вала указанного ортеза.
При этом датчик 3 углов поворота вала ортеза подсоединен к блоку 5 индикации, прикрепленному к голове пользователя экзоскелетона с размещением блока 5 в поле зрения пользователя (как показано на фиг. 6, иллюстрирующей пример выполнения интерфейса управления работой экзоскелетона нижних конечностей в режиме программного управления), а кнопка 4 включения интерфейса (которая может быть закреплена на крайней фаланге со стороны ладони указательного пальца правой руки пользователя экзоскелетона) подсоединена к контроллеру 6 привода вала ортеза. Причем к блоку 5 индикации подсоединен также контроллер 6 привода вала ортеза для информирования пользователя экзоскелетона о выходе из строя контроллера 6 или о возникшем нерабочем состоянии разрядившегося аккумулятора привода вала ортеза.
Таким образом, блок 5 индикации включает в свой состав индикатор 7 включения интерфейса, индикатор 8 углов сгиба ортеза и индикатор 9 предупреждения об аварийном состоянии контроллера 6 привода вала ортеза или аккумулятора указанного привода (подобно тому, как показано на фиг. 5, иллюстрирующей пример выполнения интерфейса управления работой экзоскелетона нижних конечностей в режиме программного управления). Блок 5 индикации, сориентированный на визуальную систему восприятия пользователя экзоскелетона, может быть выполнен сориентированным на тактильное восприятие с индикаторами в виде пьезоэлектрических вибраторов на гибкой подложке, размещаемыми на коже пользователя экзоскелетона (на фигурах не показаны).
Предлагаемый интерфейс управления работой экзоскелетона нижних конечностей в режиме ручного управления функционирует следующим образом.
Основным видом движения экзоскелетона является ходьба, которая осуществляется при ручном управлении путем выработки с помощью датчиков 1 измерения усилий сигналов, усиливаемых в усилителе 2 и задающих в контроллере 6 привода вала ортеза необходимый для ходьбы диапазон углов поворота вала ортеза в результате изменения усилий, поочередно оказываемых в настоящем примере на два датчика 1 измерения усилий с помощью двух фаланг пальца руки пользователя экзоскелетона для поворота вала ортеза в двух взаимопротивоположных направлениях.
Причем, предлагаемое изменение амплитуд упомянутых сигналов пропорционально изменению моментов сил, развиваемых на валу ортеза, что обусловлено калибровкой датчиков 1 измерения усилий с возможностью формирования сигналов ручного управления с амплитудами, пропорциональными моментам сил, развиваемых на валу указанного ортеза, и обеспечиваемыми пропорциональным изменением усилий, оказываемых на эти датчики соответствующими фалангами пальца руки пользователя.
Указанное изменение амплитуд сигналов ручного управления, вырабатываемых датчиками 1 измерения усилий приводит к экономии амплитуд движений нижней конечности экзоскелетона, присущей физиологии человека при смене (перестройке) шага, и обеспечивает повышение эргономичности управления движением экзаскелетона, заключающееся в устранении недостатков, свойственных контролю движения экзоскелетона с помощью датчиков усилий, управляющий сигнал которых пропорционален угловым скоростям вращения вала ортеза (в настоящем примере коленного) сустава и который при ходьбе в усложненных условиях, обусловленных порогами, бордюрами и другими неровностями опорной поверхности, вызывает автоматическое увеличение усилия, развиваемого ортезом (с излишней амплитудой движений нижней конечности экзоскелетона) из-за компенсации потери скорости вращения вала ортеза сустава от указанных внешних факторов.
Такие движения экзоскелетона, как подъем и посадка, при функционировании предлагаемого интерфейса управления работой экзоскелетона нижних конечностей в режиме ручного управления осуществляются путем обеспечения предварительно подобранных тренинговых усилий, поочередно оказываемых на два датчика 1 измерения усилий с помощью двух фаланг пальца руки пользователя экзоскелетона.
Блок 5 индикации облегчает пользователю управление движением экзоскелетона в ручном режиме в результате визуального контроля углов сгиба ортеза коленного сустава за счет сигналов, поступающих на индикатор 8 углов сгиба ортеза от датчика 3 углов поворота вала этого ортеза.
Для раскрытия использования заявляемого способа выработки сигналов, управляющих работой экзоскелетона нижних конечностей, предлагается пример выполнения интерфейса управления работой экзоскелетона нижних конечностей (в составе четырех ортезов, в частности ортеза тазобедренного сустава и ортеза коленного сустава правой ноги пользователя экзоскелетона и двух ортезов таких же суставов левой ноги пользователя экзоскелетона) в режиме программного управления (см. фиг. 2), содержащего четыре датчика 3 углов поворота валов и четыре датчика 10 угловых скоростей поворота валов четырех указанных ортезов суставов ног пользователя экзоскелетона, датчик 11 отклонения торса пользователя экзоскелетона от вертикали в сагиттальной и фронтальной плоскостях, два датчика 12 давления на правую и левую стопы экзоскелетона со стороны опорной поверхности (по одному на каждую стопу экзоскелетона) и процессорный блок 13, необходимые для функционирования интерфейса в режиме программного управления, многофункциональную кнопку 14 с нефиксируемым состоянием с возможностью переключения вида программного движения экзоскелетона и отключения программного режима управления работой экзоскелетона с включением ручного режима управления работой экзоскелетона, блок выработки сигналов ручного управления с помощью пальцев рук пользователя экзоскелетона, состоящий из двух частей, образованных каждая (правая и левая) четырьмя датчиками 1 измерения усилий и одним усилителем 2 сигналов ручного управления, и блок 15 индикации движения экзоскелетона в режиме программного управления его работой.
При этом четыре датчика 3 углов поворота валов и четыре датчика 10 угловых скоростей поворота валов четырех указанных ортезов суставов ног пользователя экзоскелетона, датчик 11 отклонения торса пользователя экзоскелетона от вертикали в сагиттальной и фронтальной плоскостях, два датчика 12 давления на правую и левую стопы экзоскелетона со стороны опорной поверхности подключены в следящем режиме к процессорному блоку 13.
Многофункциональная кнопка 14 с нефиксируемым состоянием (см. фиг. 3) закреплена на крайней фаланге со стороны ладони указательного пальца правой руки пользователя экзоскелетона и подсоединена к процессорному блоку 13. На фиг. 3 показана также вторая кнопка 14, закрепленная на крайней фаланге со стороны ладони указательного пальца левой руки пользователя экзоскелетона и параллельно подсоединенная к процессорному блоку 13 для удобства эксплуатации экзоскелетона пользователем - левшой.
Восемь датчиков 1 измерения усилий (см. фиг. 3) выполнены в виде плоских тензочувствительных элементов, размещены по два с их закреплением на двух фалангах, соседних со стороны конца, указательного и среднего пальцев правой и левой рук пользователя экзоскелетона и через два усилителя 2 сигналов ручного управления, закрепленные по одному на запястьях правой и левой рук пользователя экзоскелетона, подключены к процессорному блоку 13.
Процессорный блок 13 (см. фиг. 5) подсоединен к четырем контроллерам 16 приводов валов четырех указанных выше ортезов и подключен к блоку 15 индикации, который включает в свой состав индикатор 17 текущего подрежима программного управления работой экзоскелетона, четыре индикатора 18 углов сгиба четырех указанных ортезов, два индикатора 19 давления на правую и левую стопы экзоскелетона и индикатор 20 предупреждения о выходе из строя контроллеров 16, процессорного блока 13 или разрядившегося аккумулятора приводов валов ортезов и прикреплен к голове пользователя экзоскелетона с размещением блока 15 в поле зрения пользователя (см. фиг. 6).
Функционирование предлагаемого интерфейса управления работой экзоскелетона нижних конечностей в режиме программного управления предусматривает следующие рабочие подрежимы его работы.
Всего поддерживается шесть рабочих подрежимов:
а) приводы отключены (исходный режим);
б) подъем (вставание со стула);
в) вертикально;
г) движение шагом в режиме программного управления;
д) движение шагом в режиме ручного управления;
е) посадка (опускание на стул).
Включение/выключение интерфейса и переход из одного рабочего подрежима в другой рабочий подрежим (включая корректирующее изменение углов поворота валов четырех ортезов) осуществляется посредством нажатия пользователем экзоскелетона, например, на размещенную на его правой руке многофункциональную кнопку 14 с нефиксируемым состоянием.
Исходный подрежим - "приводы отключены" (после включения питания интерфейса однократным коротким нажатием на кнопку 14 приводы валов четырех ортезов не включены). В данном режиме индикатор 17 текущего режима управления работой экзоскелетона отображает символ 0.
При двукратном коротком нажатии на кнопку 14 на индикаторе 17 отображается символ В и интерфейс переходит в подрежим "подъем" в рамках базовых программных вариантов поворота валов ортезов, в течение которого приводы валов четырех ортезов включаются и отрабатывают последовательность: наклон торса вперед, одновременное разгибание правого и левого ортезов коленных суставов, одновременное разгибание правого и левого ортезов тазобедренных суставов, переход в режим "вертикально".
Углы наклона торса, углы сгибания указанных ортезов и скорости поворота валов двух ортезов тазобедренного и коленного суставов при этом контролируются интерфейсом по показаниям четырех датчиков 3 углов поворота валов указанных ортезов и четырех датчиков 10 угловой скорости поворота валов этих ортезов, а также датчика 11 отклонения торса пользователя экзоскелетона от вертикали в сагиттальной и фронтальной плоскостях.
В подрежиме "вертикально" приводы валов указанных ортезов блокируются, а на индикаторе 17 отображается символ I.
Из подрежима "вертикально" интерфейс может перевести экзоскелетон в рамках базовых программных вариантов поворота валов ортезов в подрежим "движение шагом в режиме программного управления" в результате однократного длительного нажатия на кнопку 14, при котором на индикаторе 17 отображается символ П.
В данном подрежиме управление движением экзоскелетона осуществляется наклоном торса влево-вперед (шаг правой ногой) и вправо-вперед (шаг левой ногой). Команда выполнения шага неопорной ногой формируется на базе данных о наклоне торса, выдаваемых датчиком 11 и данных о давлении на стопу экзоскелетона, выдаваемых датчиками 12 давления опорной поверхности на стопы. Опорной считается та нога, давление на стопу которой максимально, шаг делается неопорной ногой при условии наклона торса пилота вперед и в сторону опорной ноги. Попеременно наклоняя с помощью опорных приспособлений (костылей, ходунков) торс вправо и лево пользователь экзоскелетона добивается движения в нужном направлении с нужным темпом, который вводится в процессорный блок 13 на основе учета показаний четырех датчиков 3 углов поворота валов указанных ортезов и четырех датчиков 10 угловой скорости поворота валов этих ортезов. Параметры движения: высота подъема стопы и длина шага введены в процессорный блок 13 заранее.
При движении экзоскелетона четыре индикатора 18 демонстрируют текущие углы сгиба четырех ортезов суставов, а два индикатора 19 - уровни давления на правую и левую стопы экзоскелетона.
Из подрежима "вертикально" интерфейс может перевести экзоскелетон в рамках базовых программных вариантов поворота валов ортезов в подрежим "движение шагом в режиме ручного управления" в результате двукратного длительного нажатия на кнопку 14, при котором происходит отключение программного режима управления работой экзоскелетона с включением ручного режима управления работой экзоскелетона и на индикаторе 17 отображается символ Р.
В данном подрежиме управление движением экзоскелетона осуществляется сжиманием/разжиманием четырех пальцев правой и левой рук пользователя экзоскелетона путем изменения давления, оказываемого фалангами указанных пальцев на восемь датчиков 1 измерения усилий за счет опоры указанных датчиков, например, на поверхность рукояток двух костылей подлокотных (см. пальцы с четырьмя датчиками 1 измерения усилий правой ладони пользователя на фиг. 4).
В отличие от программного управления движением шагом процессорный блок 13 формируют не команды поочередного выполнения шагов в рамках данного вида базового программного варианта поворота валов ортезов, а направляет (путем коммутации) в ручном режиме управления движения шагом сигналы, вырабатываемые четырьмя парами датчиков 1 измерения усилий и усиливаемые двумя усилителями 2 в соответствующие четыре контроллера 16 приводов валов четырех указанных ортезов.
При этом интерфейс управления работой экзоскелетона нижних конечностей в режиме программного управления функционирует в режиме работы, изложенном выше в случае интерфейса управления работой экзоскелетона нижних конечностей в режиме ручного управления с изменением амплитуд сигналов, вырабатываемых датчиками 1 измерения усилий, пропорционально изменению моментов сил, развиваемых на валах ортезов, в результате поочередно оказываемых усилий на указанные датчики при ходьбе для выработки ими упомянутых сигналов двумя фалангами пальцев рук пользователя с возможностью поворота валов ортезов в двух взаимопротивоположных направлениях
Указанные выше изменения амплитуд сигналов, вырабатываемых датчиками 1 измерения усилий обусловлены калибровкой датчиков 1 измерения усилий с возможностью формирования сигналов ручного управления с амплитудами, пропорциональными моментам сил, развиваемых на валах ортезов, и обеспечиваемыми пропорциональным изменением усилий, оказываемых на эти датчики соответствующими фалангами пальца руки пользователя экзоскелетона.
Из подрежима "вертикально" интерфейс может перевести экзоскелетон в рамках базовых программных вариантов поворота валов ортезов в подрежим "посадка" в результате троекратного короткого нажатия на кнопку 14, при котором на индикаторе 17 отображается символ Н.
При этом приводы валов четырех ортезов отрабатывают последовательность: наклон торса вперед, одновременное сгибание правого и левого ортезов коленных суставов, одновременное сгибание правого и левого ортезов тазобедренных суставов, переход в режим "приводы отключены".
Углы наклона торса, углы сгибания указанных ортезов и скорости поворота валов двух ортезов тазобедренного и коленного суставов при этом контролируются интерфейсом по показаниям четырех датчиков 3 углов поворота валов указанных ортезов и четырех датчиков 10 угловой скорости поворота валов этих ортезов, а также датчика 11 отклонения торса пользователя экзоскелетона от вертикали в сагиттальной и фронтальной плоскостях, после чего на индикаторе 17 отображается символ 0.
В дополнение к индикатору 17 текущего подрежима программного управления работой экзоскелетона четыре индикатора 18 углов сгиба четырех указанных ортезов, два индикатора 19 давления на правую и левую стопы экзоскелетона и индикатор 20 предупреждения о выходе из строя контроллеров 16, процессорного блока 13 или разрядившегося аккумулятора приводов валов ортезов в составе блока 15 индикации повышают эффективность пользования экзоскелетом в режиме программного управления.
Датчики 3 углов поворота валов ортезов могут быть выполнены с применением потенциометров, а также оптических или магнитных инклинометров. В качестве датчика 11 отклонения торса пользователя экзоскелетона от вертикали в сагиттальной и фронтальной плоскостях может быть применен 3-хосевой МЭМС-датчик, совмещающий функции гироскопа и акселерометра. Для изготовления датчиков 12 давления опорной поверхности на стопы экзоскелетона и датчиков 1 измерения усилий могут быть применены пленочные тензорезисторы.
Таким образом, предлагаемый способ выработки сигналов, управляющих работой экзоскелетона нижних конечностей, эффективен как в случае осуществления на основе него автономного эргономичного способа ручного управления работой экзоскелетона нижних конечностей и интерфейса для его осуществления, так и в случае его реализации в качестве эргономичного подрежима «движение шагом в режиме ручного управления» органично включенного в функционирование интерфейса управления работой экзоскелетона нижних конечностей в режиме программного управления и обеспечивающего стабильную работоспособность экзоскелетона в усложненных условиях движения шагом по опорной поверхности с препятствиями для указанного движения (неровностями в виде бордюров, порогов, ступеней и т.п.).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления движениями конечностей экзоскелетона | 1977 |
|
SU721092A1 |
| ЭКЗОСКЕЛЕТОН | 1994 |
|
RU2110243C1 |
| ЭКЗОСКЕЛЕТОН | 1995 |
|
RU2110244C1 |
| ЭКЗОСКЕЛЕТОН | 1994 |
|
RU2117470C1 |
| ЭКЗОСКЕЛЕТОН | 1994 |
|
RU2075986C1 |
| ЭКЗОСКЕЛЕТОН ИНВАЛИДА | 2012 |
|
RU2493805C1 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ЧЕЛОВЕКУ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ (ВАРИАНТЫ) | 2015 |
|
RU2658481C2 |
| АППАРАТ ДЛЯ ПОМОЩИ ПРИ ХОДЬБЕ | 2013 |
|
RU2555801C2 |
| КОЛЕННЫЙ ШАРНИР ЭКЗОСКЕЛЕТОНА | 2012 |
|
RU2506932C1 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |


Группа изобретений относится к медицинской технике и может быть использована в экзоскелетонах (экзоскелетах) нижних конечностей с пневматическим, гидравлическим или электрическим приводом для обеспечения ходьбы пользователей с полностью или частично парализованными нижними конечностями, а также для реабилитации пациентов при восстановлении навыков ходьбы после травм и заболеваний различной тяжести. Предложен способ выработки сигналов, управляющих работой экзоскелетона нижних конечностей и задающих необходимый для ходьбы диапазон углов поворота вала как минимум одного ортеза сустава ноги в составе экзоскелетона, путем генерации сигналов за счет усилий пользователя экзоскелетона с помощью средства выработки сигналов. Сигналы вырабатывают в соответствии с условием изменения их амплитуды пропорционально изменению момента силы, развиваемого на валу ортеза. Также предложен способ ручного управления работой экзоскелетона нижних конечностей путем выработки сигналов в соответствии с вышеуказанным способом с помощью как минимум одного пальца руки пользователя экзоскелетона. Амплитуду сигналов изменяют пропорционально изменению момента силы, развиваемого на валу как минимум одного ортеза сустава ноги в составе экзоскелетона, путем изменения усилия, поочередно оказываемого как минимум на два датчика измерения усилий с помощью двух фаланг пальца руки пользователя экзоскелетона для поворота вала ортеза в двух взаимопротивоположных направлениях. Интерфейс управления работой экзоскелетона нижних конечностей в режиме ручного управления содержит блок выработки с помощью пальцев руки пользователя экзоскелетона сигналов ручного управления, задающий необходимый для ходьбы диапазон углов поворота вала как минимум одного ортеза сустава ноги в составе экзоскелетона и направляемый как минимум в один привод вала ортеза. Блок выработки с помощью пальцев руки пользователя экзоскелетона сигналов ручного управления выполнен на основе как минимум двух датчиков измерения усилий, поочередно оказываемых на датчики при ходьбе для выработки ими сигналов двумя фалангами пальца руки пользователя с возможностью поворота вала ортеза в двух взаимопротивоположных направлениях. Датчики измерения усилий откалиброваны с возможностью формирования сигналов ручного управления с амплитудами, пропорциональными моментам сил, развиваемых на валу ортеза, и обеспечиваемыми пропорциональным изменением усилий, оказываемых на эти датчики фалангами пальца руки пользователя. Интерфейс управления работой экзоскелетона нижних конечностей в режиме программного управления содержит как минимум один датчик угла поворота вала как минимум одного ортеза сустава ноги в составе экзоскелетона, процессорный блок для выработки сигналов, задающих программно ограниченный диапазон углов поворота вала ортеза, на основе считывания сигналов, поступающих от датчика, снабженный автономным средством запуска базовых программных вариантов поворота вала ортеза в рамках основных видов движений экзоскелетона, включающих ходьбу, и изменения угла поворота в режиме программного управления и соединенный как минимум с одним приводом вала ортеза. Предлагаемый интерфейс оснащен дополнительным блоком выработки с помощью пальцев руки пользователя экзоскелетона сигналов ручного управления, задающих необходимый для ходьбы в усложненных условиях диапазон углов поворота вала ортеза, соединенным с упомянутым процессорным блоком с возможностью отключения программного режима управления работой экзоскелетона и включения ручного режима управления работой экзоскелетона, и выполненным на основе как минимум двух датчиков измерения усилия, поочередно оказываемого на датчики при ходьбе для выработки ими сигналов двумя фалангами пальца руки пользователя с возможностью поворота вала ортеза в двух взаимопротивоположных направлениях. Датчики измерения усилия откалиброваны с возможностью формирования сигналов ручного управления с амплитудами, пропорциональными моментам сил, развиваемых на валу ортеза, и обеспечиваемыми пропорциональным изменением. Использование группы изобретений позволит усовершенствовать способа выработки сигналов, управляющих работой экзоскелетона нижних конечностей, обеспечит повышение эксплуатационных характеристик указанного экзоскелетона в результате использования упомянутого способа выработки сигналов на более высоком эргономичном уровне управления работой экзоскелетона нижних конечностей путем выработки сигналов, задающих необходимый для ходьбы диапазон углов поворота валов ортезов суставов ног в составе указанного экзоскелетона, с помощью пальцев руки пользователя экзоскелетона, получившего осуществление в предлагаемом интерфейсе управления работой экзоскелетона нижних конечностей в режиме ручного управления в условиях качественно улучшенных возможностей преодоления порогов, бордюров и других неровностей опорной поверхности, а также путем корректировки работы экзоскелетона нижних конечностей во время ходьбы в усложненных условиях (при преодолении препятствий местности) при функционировании предлагаемого интерфейса управления работой экзоскелетона нижних конечностей в режиме программного управления с дополнительным блоком выработки с помощью пальцев руки пользователя экзоскелетона сигналов, задающих поворот валов ортезов суставов ног, за счет эффективно приближенного к физиологии пользователя экзоскелетона режима изменения амплитуд вырабатываемых пользователем сигналов, пропорционального изменению моментов сил, развиваемых на валах ортезов суставов ног пользователя. 4 н. и 13 з.п. ф-лы, 6 ил.
1. Способ выработки сигналов, управляющих работой экзоскелетона нижних конечностей и задающих необходимый для ходьбы диапазон углов поворота вала как минимум одного ортеза сустава ноги в составе указанного экзоскелетона, путем генерации указанных сигналов за счет усилий пользователя экзоскелетона с помощью средства выработки указанных сигналов, отличающийся тем, что упомянутые сигналы вырабатывают в соответствии с условием изменения их амплитуды пропорционально изменению момента силы, развиваемого на валу указанного ортеза.
2. Способ ручного управления работой экзоскелетона нижних конечностей путем выработки сигналов в соответствии со способом по п. 1 с помощью как минимум одного пальца руки пользователя экзоскелетона, отличающийся тем, что амплитуду упомянутых сигналов изменяют пропорционально изменению момента силы, развиваемого на валу как минимум одного ортеза сустава ноги в составе экзоскелетона, путем изменения усилия, поочередно оказываемого как минимум на два датчика измерения усилий с помощью двух фаланг пальца руки пользователя экзоскелетона для поворота вала указанного ортеза в двух взаимопротивоположных направлениях.
3. Интерфейс управления работой экзоскелетона нижних конечностей в режиме ручного управления, содержащий блок выработки с помощью пальцев руки пользователя экзоскелетона сигналов ручного управления, задающих необходимый для ходьбы диапазон углов поворота вала как минимум одного ортеза сустава ноги в составе указанного экзоскелетона и направляемых как минимум в один привод вала указанного ортеза, отличающийся тем, что блок выработки с помощью пальцев руки пользователя экзоскелетона сигналов ручного управления выполнен на основе как минимум двух датчиков измерения усилий, поочередно оказываемых на указанные датчики при ходьбе для выработки ими упомянутых сигналов двумя фалангами пальца руки пользователя с возможностью поворота вала указанного ортеза в двух взаимопротивоположных направлениях, причем указанные датчики измерения усилий откалиброваны с возможностью формирования сигналов ручного управления с амплитудами, пропорциональными моментам сил, развиваемых на валу указанного ортеза, и обеспечиваемыми пропорциональным изменением усилий, оказываемых на эти датчики указанными фалангами пальца руки пользователя.
4. Интерфейс по п. 3, отличающийся тем, что как минимум два датчика измерения усилий установлены с их фиксацией к ладони пользователя экзоскелетона и возможностью их рабочего контакта с двумя фалангами пальца и подключены к усилителю сигналов ручного управления, вырабатываемых указанными датчиками и задающих угол поворота вала как минимум одного ортеза сустава ноги в двух взаимопротивоположных направлениях, закрепленному на запястье одной из рук пользователя экзоскелетона, образующему с упомянутыми датчиками блок выработки с помощью пальцев руки пользователя экзоскелетона сигналов ручного управления и подсоединенному как минимум к одному контроллеру привода вала как минимум одного ортеза сустава ноги для исполнения поворота указанного вала в диапазоне углов, задаваемых указанным блоком выработки.
5. Интерфейс по п. 4, отличающийся тем, что как минимум два датчика измерения усилия выполнены в виде плоских тензочувствительных элементов и размещены с их закреплением на двух фалангах пальца руки пользователя экзоскелетона или их встройкой в конструкцию специальной перчатки.
6. Интерфейс по п. 3, отличающийся тем, что в его состав включены как минимум один датчик углов поворота вала как минимум одного ортеза сустава ноги в составе экзоскелетона и средство доставки пользователю экзоскелетона информирующих сигналов, поступающих от этого датчика.
7. Интерфейс по п. 6, отличающийся тем, что средство доставки пользователю экзоскелетона информирующих сигналов, поступающих как минимум от одного датчика углов поворота вала как минимум одного ортеза сустава ноги, выполнено в виде блока индикации, соединенного с этим датчиком и размещенного в поле зрения пользователя экзоскелетона с прикреплением блока индикации к его голове.
8. Интерфейс управления работой экзоскелетона нижних конечностей в режиме программного управления, содержащий как минимум один датчик угла поворота вала как минимум одного ортеза сустава ноги в составе экзоскелетона, процессорный блок для выработки сигналов, задающих программно ограниченный диапазон углов поворота вала указанного ортеза, на основе считывания сигналов, поступающих от указанного датчика, снабженный автономным средством запуска базовых программных вариантов поворота вала указанного ортеза в рамках основных видов движений экзоскелетона, включающих ходьбу, и изменения угла указанного поворота в режиме программного управления и соединенный как минимум с одним приводом вала указанного ортеза, отличающийся тем, что предлагаемый интерфейс оснащен дополнительным блоком выработки с помощью пальцев руки пользователя экзоскелетона сигналов ручного управления, задающих необходимый для ходьбы в усложненных условиях диапазон углов поворота вала указанного ортеза, соединенным с упомянутым процессорным блоком с возможностью отключения программного режима управления работой экзоскелетона и включения ручного режима управления работой экзоскелетона и выполненным на основе как минимум двух датчиков измерения усилия, поочередно оказываемого на указанные датчики при ходьбе для выработки ими упомянутых сигналов двумя фалангами пальца руки пользователя с возможностью поворота вала указанного ортеза в двух взаимопротивоположных направлениях, причем указанные датчики измерения усилия откалиброваны с возможностью формирования сигналов ручного управления с амплитудами, пропорциональными моментам сил, развиваемых на валу указанного ортеза, и обеспечиваемыми пропорциональным изменением усилий, оказываемых на эти датчики указанными фалангами пальца руки пользователя.
9. Интерфейс по п. 8, отличающийся тем, что как минимум два датчика измерения усилия установлены с их фиксацией к ладони пользователя экзоскелетона и возможностью их рабочего контакта с двумя фалангами пальца и подключены к усилителю сигналов ручного управления, задающих поворот вала как минимум одного ортеза сустава ноги в двух взаимопротивоположных направлениях, закрепленному на запястье одной из рук пользователя экзоскелетона, образующему с этими датчиками блок выработки с помощью пальцев руки пользователя экзоскелетона сигналов ручного управления и подсоединенному к процессорному блоку с возможностью присоединения через него как минимум к одному контроллеру привода вала как минимум одного ортеза сустава ноги для исполнения поворота указанного вала в диапазоне углов, задаваемых указанным блоком выработки.
10. Интерфейс по п. 9, отличающийся тем, что как минимум два датчика измерения усилия выполнены в виде плоских тензочувствительных элементов и размещены с их закреплением на двух фалангах пальца руки пользователя экзоскелетона или встройкой указанных датчиков в конструкцию специальной перчатки.
11. Интерфейс по п. 8, отличающийся тем, что автономное средство запуска базовых программных вариантов поворота вала как минимум одного ортеза сустава ноги в составе экзоскелетона в рамках основных видов движений экзоскелетона, включающих ходьбу, и изменения угла указанного поворота в режиме программного управления выполнено в виде подключенной к процессорному блоку многофунциональной кнопки с нефиксируемым состоянием с возможностью переключения этой кнопкой вида программного движения экзоскелетона и отключения с помощью нее программного режима управления работой экзоскелетона с включением ручного режима управления работой экзоскелетона.
12. Интерфейс по п. 11, отличающийся тем, что многофункциональная кнопка с нефиксируемым состоянием установлена с ее фиксацией на ладони пользователя экзоскелетона и возможностью рабочего контакта с одной из фаланг пальцев.
13. Интерфейс по п. 8, отличающийся тем, что в его состав включен датчик отклонения торса пользователя экзоскелетона от вертикали в сагиттальной и фронтальной плоскостях, подключенный в следящем режиме к процессорному блоку.
14. Интерфейс по п. 8, отличающийся тем, что в его состав включен как минимум один датчик давления на стопу экзоскелетона со стороны опорной поверхности, подключенный в следящем режиме к процессорному блоку.
15. Интерфейс по п. 8, отличающийся тем, что в его состав включен как минимум один датчик угловой скорости поворота вала как минимум одного ортеза сустава ноги в составе экзоскелетона, подключенный в следящем режиме к процессорному блоку.
16. Интерфейс по п. 8, отличающийся тем, что в его состав включено средство доставки пользователю экзоскелетона информирующих сигналов, поступающих как минимум от одного датчика углов поворота вала как минимум одного ортеза сустава ноги и как минимум от одного датчика давления на стопу экзоскелетона.
17. Интерфейс по п. 16, отличающийся тем, что средство доставки пользователю экзоскелетона информирующих сигналов, поступающих как минимум от одного датчика углов поворота вала как минимум одного ортеза сустава ноги и как минимум от одного датчика давления на стопу экзоскелетона, выполнено в виде блока индикации, соединенного с процессорным блоком и размещенного в поле зрения пользователя экзоскелетона с прикреплением блока индикации к его голове.
| US 5662693 A, 02.09.1997 | |||
| RU 2014136777 A, 20.05.2016 | |||
| US 7153242 A1, 15.05.2003 | |||
| WO 2015168788 A1, 12.11.2015 | |||
| US 8070700 B2, 06.12.2011. |

