Изобретение относится к турбомашиностроению и может быть использовано в качестве опор высокоскоростных роторов машин и агрегатов, нагруженных радиальными нагрузками, в системах кондиционирования воздуха кабин летательных аппаратов, а также систем турбонаддува в современном автомобилестроении.
Известен многолепестковый газодинамический подшипник с активным управлением, который является наиболее близким по технической сущности к предлагаемому изобретению, содержащий корпус, в пазы которого внахлест друг другу вставлены лепестки, при этом, в корпус вставлены пьезоактуаторы, на которые опираются крепления лепестков (см. патент РФ №2581101, МПК F16C 17/12, опубл. 05.11.2014 г.).
Недостатком является неконтролируемая деформация упругих элементов и, следовательно, недостаточная надежность и долговечность подшипникового узла.
Задача, на решение которой направлено изобретение, состоит в улучшении динамических характеристик высокоскоростного ротора, повышении надежности и долговечности подшипникового узла, а также ресурса работы при многократных пусках и остановах.
Техническая задача достигается тем, что многолепестковый мехатронный газодинамический подшипник содержит корпус, в пазы которого внахлест друг другу вставлены лепестки, расположенные равномерно по окружности корпуса, и пьезоактуаторы, согласно изобретению, тонкие лепестки опираются на секционные пружины, вставленные в продольные пазы корпуса и воспринимающие нагрузку при отсутствии электрического напряжения, при этом расположенные вдоль оси вращения ротора пьезоактуаторы позволяют формировать коническую и бочкообразную упругую поверхность.
Технический результат заключается в улучшении динамических характеристик высокоскоростного ротора, повышении надежности и долговечности подшипникового узла, а также ресурса работы при многократных пусках и остановах за счет пьезоактуаторов, с помощью которых можно контролировать и управлять жесткостью опорной поверхности в осевом и радиальном направлениях.
Сущность изобретения поясняется чертежами.
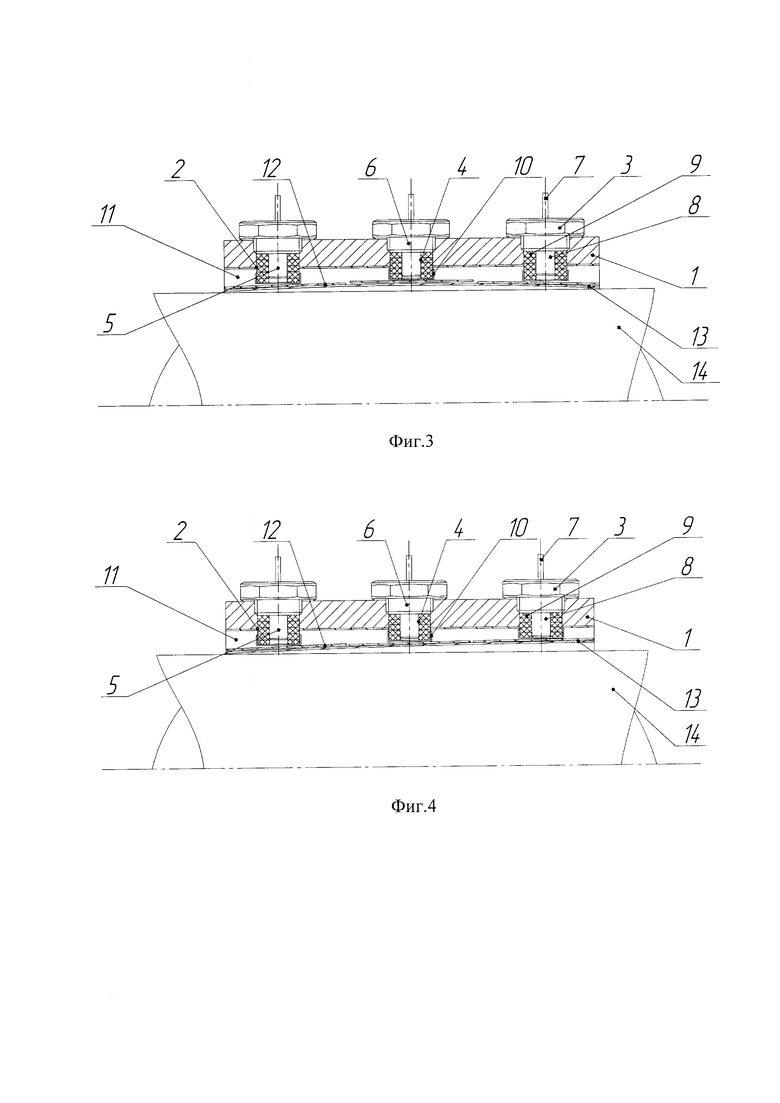
На фиг. 1 изображен многолепестковый мехатронный газодинамический подшипник в момент пуска и останова, на фиг. 2 - то же, при установившемся движении; на фиг. 3 изображен продольный разрез подшипника при формировании прогиба в центральной части лепестка, на фиг. 4 - то же, при формировании конической поверхности; на фиг. 5 изображен увеличенный вид пьезоактуатора при отсутствии электрического напряжения, на фиг. 6 - увеличенный вид пьезоактуатора при наличии электрического напряжения.
Многолепестковый мехатронный газодинамический подшипник (фиг. 1 и 2) представляет собой опору скольжения, состоящую из корпуса 1, выполненного в виде втулки с радиальными отверстиями 2, в которые вкручены зафиксированные гайками 3 пьезоактуаторы 4, состоящие из стержня 5 с резьбовой частью 6, в которой имеются отверстия для проводов 7, а также гладкой частью 8, на которой зафиксированы пьезоэлементы 9, закрытые защитными колпачками 10. Корпус 1 имеет продольные пазы 11, в которые вставлены секционные пружины 12, являющиеся в то же время опорами тонких лепестков 13, охватывающих вал 14.
Устройство работает следующим образом.
При отсутствии электрического напряжения на проводах 7 пьезоактуаторов 4 пьезоэлементы 9 не увеличиваются в размерах и не участвуют в работе - конструкция функционирует как лепестковый газодинамический подшипник (фиг. 1 и 5). Во время работы секционные пружины 12 воспринимают нагрузки, действующие на лепестки 13 со стороны вала 14, при подаче напряжения пьезоэлементы 9 увеличиваются и пьезоактуаторы 4 участвуют в работе, повышая жесткость лепестков 13 и всего многолепесткового мехатронного подшипника (фиг. 2 и 6). При подаче разного по величине напряжения на провода 7 пьезоактуаторов 4 жесткость лепестков 13 в осевом направлении меняется пропорционально подаваемому на соответствующий пьезоактуатор 4 напряжению, что позволяет избегать или минимизировать влияние полу скоростных вихрей (фиг. 3) и конических прецессий ротора 14 (фиг. 4).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕПЕСТКОВЫЙ МЕХАТРОННЫЙ ГАЗОДИНАМИЧЕСКИЙ ПОДШИПНИК | 2019 |
|
RU2708409C1 |
| МНОГОЛЕПЕСТКОВЫЙ ГАЗОДИНАМИЧЕСКИЙ ПОДШИПНИК С АКТИВНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2581101C1 |
| УПОРНЫЙ ЛЕПЕСТКОВЫЙ ГАЗОДИНАМИЧЕСКИЙ ПОДШИПНИК | 2018 |
|
RU2710091C1 |
| ЛЕПЕСТКОВЫЙ ГАЗОДИНАМИЧЕСКИЙ ПОДШИПНИК С АКТИВНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2568005C1 |
| КОНИЧЕСКИЙ ЛЕПЕСТКОВЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ | 2010 |
|
RU2437005C2 |
| КОМБИНИРОВАННЫЙ РАДИАЛЬНО-ОСЕВОЙ ГАЗОДИНАМИЧЕСКИЙ ЛЕПЕСТКОВЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ | 2011 |
|
RU2489615C1 |
| КОМБИНИРОВАННЫЙ РАДИАЛЬНО-ОСЕВОЙ ГАЗОДИНАМИЧЕСКИЙ ЛЕПЕСТКОВЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ | 2015 |
|
RU2605658C2 |
| КОМБИНИРОВАННАЯ ОПОРА | 2015 |
|
RU2605703C2 |
| СПОСОБ УПРАВЛЕНИЯ РАДИАЛЬНО-ОСЕВЫМИ ДВИЖЕНИЯМИ РОТОРА | 2022 |
|
RU2792850C1 |
| Управляемый газомагнитный подшипниковый узел | 2017 |
|
RU2677387C1 |



Изобретение относится к турбомашиностроению и может быть использовано в качестве опор высокоскоростных роторов машин и агрегатов, нагруженных радиальными нагрузками, в системах кондиционирования воздуха кабин летательных аппаратов, а также систем турбонаддува в современном автомобилестроении. Многолепестковый мехатронный газодинамический подшипник содержит корпус, в пазы которого внахлест друг другу вставлены лепестки, расположенные равномерно по окружности корпуса, и пьезоактуаторы. Тонкие лепестки опираются на секционные пружины, вставленные в продольные пазы корпуса и воспринимающие нагрузку при отсутствии электрического напряжения. При этом расположенные вдоль оси вращения ротора пьезоактуаторы позволяют формировать коническую и бочкообразную упругую поверхность. Технический результат: улучшение динамических характеристик высокоскоростного ротора, повышение надежности и долговечности подшипникового узла, а также ресурса работы при многократных пусках и остановах за счет пьезоактуаторов, с помощью которых можно контролировать и управлять жесткостью опорной поверхности в осевом и радиальном направлениях. 6 ил.
Многолепестковый мехатронный газодинамический подшипник, содержащий корпус, в пазы которого внахлест друг другу вставлены лепестки, расположенные равномерно по окружности корпуса, и пьезоактуаторы, отличающийся тем, что тонкие лепестки опираются на секционные пружины, вставленные в продольные пазы корпуса и воспринимающие нагрузку при отсутствии электрического напряжения, при этом расположенные вдоль оси вращения ротора пьезоактуаторы позволяют формировать коническую и бочкообразную упругую поверхность.
| МНОГОЛЕПЕСТКОВЫЙ ГАЗОДИНАМИЧЕСКИЙ ПОДШИПНИК С АКТИВНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2581101C1 |
| US 4178046 A, 11.12.1979 | |||
| Устройство гашения виброколебаний газодинамического подшипника | 1988 |
|
SU1555556A1 |
| КОМБИНИРОВАННАЯ ОПОРА | 2015 |
|
RU2605228C1 |
| Подшипник скольжения | 1972 |
|
SU445772A1 |

